Echilibrul Paramelor de Legare Si de Remorcare
12
UI 3: Instalații navale de punte 128 Unitatea de învăţare nr. 3 INSTALAȚII NAVALE DE PUNTE Unitatea de studiu 3.3 Echilibrul elementelor instalați lor de ancorare, manevra legare si remorcare Ritm de studiu recomandat: 100 min. Cuprins Echilibrul lanţurilor de ancoră. Echilibrul paramelor de legare si de remorcare neimerse. Echilibrul parâmelor de remorcare imerse. Mecanisme de ancorare, legare si remorcare. OBIECTIVELE UNITĂŢII DE STUDIU 3.3 - determinarea ecuațiilor de echilibru ale lanţurilor de ancoră; - determinarea ecuațiilor de echilibru ale parâmelor de legare/ remorcare imerse și neimerse; - expunerea argumentată a caracteristicilor constructive și funcționale specifce mecanismelor de ancorare, legare si remorcare. 3.3.1 Echilibrul lanţurilor de ancoră Instalaţ iile navale de ancorare, legare şi remorcare au rolul de a asigura fixarea navei faţă de un punct fix (ancoră, cheu sau față de nava de propulsare). Linia de legătură (lanţul sau parâma) suportă licitarea dat ă de rezultanta forţ elor exterioare, care tind să deplaseze nava, cazul instalaţiilor de ancorare şi legare, sau se opun deplasării acesteia, în cazul instalaţ iei de remorcare. Studierea mecanicii instalaţ iilor de ancorare şi legare, când nava se află la un punct fix sau instalaţ iei de remorcare când nava se deplasează, se poate face identic, considerând corpul navei supus forţ elor exterioare: curenţii de apă, curenţii atmosferici, efectul loviturilor de val, forţ ele de inerţie. Legătura dintre navă si elementul de fixare (ancora, binta de cheu) sau remorcher se realizează cu ajutorul lanţurilor sau parâmelor, care datorită raportului mic dintre grosime şi lungime, precum si flexibilităţ ii lor, pot fi considerate fire grele, omogene şi flexibile. Pentru elementul de lanț de ancoră din fig. 3. 3.1 ds este elementul de lanţ, qg este greutatea proprie, T este tensiunea axială iar unghiul local de înclinare. Deci: Fig. 3.3.1 Elementul de lanț de ancoră Fig. 3.3.2 Elementul de parâmă
-
Upload
babuta-madalin -
Category
Documents
-
view
55 -
download
6
description
instalatii navale de bord
Transcript of Echilibrul Paramelor de Legare Si de Remorcare
-
UI 3: Instalaii navale de punte
128
Unitatea de nvare nr. 3
INSTALAII NAVALE DE PUNTE
Unitatea de studiu 3.3
Echilibrul elementelor instalailor de ancorare, manevra legare si remorcare
Ritm de studiu recomandat: 100 min.
Cuprins
Echilibrul lanurilor de ancor.
Echilibrul paramelor de legare si de remorcare neimerse.
Echilibrul parmelor de remorcare imerse.
Mecanisme de ancorare, legare si remorcare.
OBIECTIVELE UNITII DE STUDIU 3.3 - determinarea ecuaiilor de echilibru ale lanurilor de ancor; - determinarea ecuaiilor de echilibru ale parmelor de legare/ remorcare imerse i neimerse; - expunerea argumentat a caracteristicilor constructive i funcionale specifce mecanismelor de
ancorare, legare si remorcare.
3.3.1 Echilibrul lanurilor de ancor
Instalaiile navale de ancorare, legare i remorcare au rolul de a asigura fixarea navei fa
de un punct fix (ancor, cheu sau fa de nava de propulsare). Linia de legtur (lanul sau
parma) suport licitarea dat de rezultanta forelor exterioare, care tind s deplaseze nava, cazul
instalaiilor de ancorare i legare, sau se opun deplasrii acesteia, n cazul instalaiei de
remorcare. Studierea mecanicii instalaiilor de ancorare i legare, cnd nava se afl la un punct
fix sau instalaiei de remorcare cnd nava se deplaseaz, se poate face identic, considernd
corpul navei supus forelor exterioare: curenii de ap, curenii atmosferici, efectul loviturilor de
val, forele de inerie. Legtura dintre nav si elementul de fixare (ancora, binta de cheu) sau
remorcher se realizeaz cu ajutorul lanurilor sau parmelor, care datorit raportului mic dintre
grosime i lungime, precum si flexibilitii lor, pot fi considerate fire grele, omogene i flexibile.
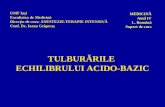
Pentru elementul de lan de ancor din fig. 3.3.1 ds este elementul de lan, qg este greutatea
proprie, T este tensiunea axial iar unghiul local de nclinare. Deci:
Fig. 3.3.1 Elementul de lan de ancor Fig. 3.3.2 Elementul de parm
-
UI 3: Instalaii navale de punte
129
sin__cos dx
dysi
ds
dx (3.3.1)
Condiiile de echilibru static:
0)sin(
0)cos(
dsYTd
dsXTd
unde X i Y sunt componentele fortei qg dupa axele Ox i Oy ( 0X , gqY ). Prin urmare:
gqTds
d
Tds
d
)sin(
0)cos(
(3.3.2)
Integrnd prima ecuaie din (3.3.2) se obine:
.cos__0)cos( 0 ctTTsiTds
d
ds
d (3.3.3)
din care se pot desprinde urmtoarele concluzii: proiecia orizontal a tensiunii T este constant
n orice punct al lanului; n punctul de tangen cu fundul apei 0 iar 0TT ; n nara de
ancor avem unghiul max iar 0maxcos TT .
n urma nlocuirii relaiei (3.3.3) n a doua relaie din (3.3.2) se obine :
gqTds
d )
cos
sin( 0
Din relaia (3.3.1) avem:
dx
dy
cos
sin
n final obinem:
dsT
gq
dx
dyd
0
(3.3.4)
Pe de alt parte elementul de lan ds se exprim sub forma:
dxdx
dydydxds
2
22 1)()(
iar relaia (3.3.4) va cpta forma:
dxT
gq
dx
dy
dx
dyd
02
1
(3.3.5)
Din punct de vedere matematic aceasta este o o ecuaie diferenial cunoscut n teoria firelor (ecuaia lniorului) i care permite obinerea curbei liniei de ancorare sub formele:
oxxT
qgsh
dx
dy (
0
) (3.3.6)
)( 00
0
0 xxT
qgch
qg
Tyy (3.3.7)
Pentru a uura demonstraia relaiei urmtoare vom preciza cteva elemente referitoare la
funciile hiberbolice (sinus hiberbolic sh x i cosinus hiberbolic chx):
-
UI 3: Instalaii navale de punte
130
1
)_(_2
)_(_2
22
'
'
xshxch
shxchxiaree
chx
chxshxiaree
shx
xx
xx
Prin urmare relatia (3.3.7) mai poate fi scrisa sub forma:
][2
)()(0
0
00
00
xxT
qgxx
T
qg
eeqg
Tyy
(3.3.8)
n care 0_00 _, Tsiyx sunt constant. Aceste mrimi pot fi obinute prin impunerea condiilor n
capetele ),(_),( BBAA yxBsiyxA iar lungimea firului este L.
)( 00
0
0 xxT
gqch
gq
Tyy AA
(3.3.9)
)( 00
0
0 xxT
gqch
gq
Tyy BB
(3.3.10)
Totodat cu relaia (3.3.6) obinem:
)()(1 00
22 xxT
qgch
dx
dy
Prin urmare elemental de lan ds: dxxxT
gqchdx
dx
dyds
)()(1 0
0
2
Aceast ultim form poate fi integrat ntre capetele A i B i se obine:
)]()([ 00
0
0
0 xxT
qgshxx
T
qgsh
qg
TdsL AB
B
A (3.3.11)
Relaiile (3.3.9) i (3.3.11) vor permite obinerea mrimilor necunoscute x0, y0, T0.
Tem pentru studiu 3.3.1: Consultai sursele bibliografice recomandate n anul II la
cursul de mecanic i selectai informaiile necesare pentru rezolvarea problemelor de echilibru
ale lanurilor de ancor.
3.3.2 Echilibrul parmelor de legare i de remorcare neimerse
Pornind de la ecuatia (3.3.2) scris sub forma:
dsgqTd )sin( (3.3.12)
menionm c n cazul parmelor de legare i de remorcare neimerse, acestea se comport ca fire
omogene grele foarte ntinse, cu sgeat redus, astfel nct se poate considera c:
dxds Deci:
dxgqdx
dyTd
ds
dyTd )()( 0 (3.3.13)
-
UI 3: Instalaii navale de punte
131
Care prin integrare succesiv devine:
20
0
)( xxT
qg
dx
dy (3.3.14)
2
0
0 )(2
xxT
qgyy (3.3.15)
care reprezint ecuaia unei parabole. ntr-un punct oarecare al parmei tensiunea T este:
2
02
0
22
0
2
0
2
0
0 )(1)(11cos
xxT
gqT
dx
dyTtgT
TT
sau : )(2
1 00
0 yyT
qgTT (3.3.16)
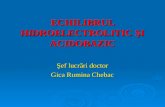
Pentru sistemul din fig.3.3.3 vom nota segmentul )/(0 gqTaOC . Cum n punctul
),0( 0 ayyxC avem un punct de minim, adic 0/ dxdy obinem c 00 x .
Fig. 3.3.3 Elementul de parm
Deci: a
xay
2
2
(3.3.17)
Dac sgeata maxim a paramei este f iar coarda bAB atunci punctul ),2
( fab
B .
Cum punctul B verific relaia (3.3.17) avem:
a
bafa
8
2
De unde: gq
T
f
ba
0
2
8
Iar 0T este : f
qgbT
8
2
0 (3.3.18)
Tensiunile din punctele A si B vor fi:
2
2222
0 1618
)2
(b
f
f
qgbqgbTTT BA (3.3.19)
-
UI 3: Instalaii navale de punte
132
Tem pentru studiu 3.3.4: Consultai sursele bibliografice recomandate n anul II la
cursul de Mecanic i selectai informaiile necesare pentru rezolvarea problemelor de echilibru
ale parmelor de legare i de remorcare neimerse.
3.3.3 Echilibrul parmelor de remorcare imerse
Ipoteze: parma tracteaz un convoi; R este fora de rezisten pe care o opune apa la
nclinarea parmei; tronsonul analizat are lungimea unitar ds :
2
2
' sin2
dv
cR wpr
(3.3.20)
unde: c'pr - coeficientul de rezisten la naintarea al parmei de remorcare; 2/2vw - presiunea
dinamic a curentului de ap.
dv
cc wprpr2
2
' (3.3.21)
Cu aceste notaii relaia (3.3.20) devine:
2sin prpr cR (3.3.22)
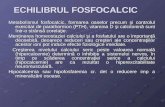
Pornind de la sistemul de fore reprezentat n fig. 3.2.14 proieciile pe cele dou axe conduc la:
0sincos)cos(cos dsRTTdT pr (3.3.23)
0cossin)sin(sin dsRdsgqTTdT pr (3.3.24)
Relaia (3.3.23) se poate scrie sub forma:
0sincossin dsRdTdT pr (3.3.25)
care prin substituirea relaiilor (3.2.1) i (3.2.12) i dup efectuarea simplificrilor conduce la
expresia: dyctggqcdT pr )sin( (3.3.26)
Fig. 3.3.4 ncrcarea dinamic a elementului de parm
Cum dygqdT forma final a ecuaiei difereniale este:
T
dT
ctgqg
c
d
pr
sin
T
dT
ctg
d
sin (3.3.27)
-
UI 3: Instalaii navale de punte
133
Dac notm cu qg
c pr tensiunea va avea forma:
141
2
2
2
2
]141cos2
141cos2[
CT (3.3.28)
C2 fiind o constant ce se poate determina din condiiile la limit.
Din relaia (3.3.28) se obine )(__)( xfiaryf i prin urmare:
ctgdydx
Pentru rezolvarea ecuaiei difereniale (3.2.27) vom determina o primitiv pentru
funcia: ctgxx
xf
sin
1)(
Functia se poate scrie:
xx
xxf
cossin
sin)(
2
I=
tt
dt
tt
dt
xx
xdx222 )1(cossin
sin
Notm tx cos care prin difereniere conduce la: dtdxx sin i sin2x=1-t
2
Aducem ecuatia de gradul doi: 02 tt
La forma canonica:
4
14)
2
1(
222 ttt
i:
)4
14()
2
1(
1
4
14)
2
1(
2
22
22
t
dt
t
dtI
Dac notm: 1)(__2
1)( ' tiartt , atunci:
2
2
22
'
]4
14[)(
)(1
t
dttI
141cos2
141cos2ln
14
1
2
14)(
2
14)(
ln142
21
2
2
22
2
2
t
t
I
Integrnd ecuia diferetial:
ctg
d
T
dT
sin
atunci:
141cos2
141cos2ln
14
1ln
2
2
2
T
-
UI 3: Instalaii navale de punte
134
Cu observaia c: qg
c pr
]1)(41cos2[
]1)(41cos2[
2
1)(4
1
2
2
qg
c
qg
c
qg
c
qg
c
Tprpr
qg
c
prpr
pr
Tem pentru studiu 3.3.3: Consultai sursele bibliografice recomandate n anul II la
cursul de Mecanic i selectai informaiile necesare pentru rezolvarea problemelor de echilibru
ale parmelor de remorcare imerse.
3.3.4 Mecanisme de ancorare, legare i remorcare
Mecanismele de ancorare, legare i remorcare au rolul de a realiza fora necesar virrii
ancorei sau tragerii navei pentru acostare sau remorcare, atunci cand asupra corpului navei sau
convoiului acioneaz rezultanta forelor exterioare eF .
Mecanisme de ancorare i legare cu comand manual
Dac pentru ancorare se folosete un lan, aceste mecanisme au ca organe de lucru una
sau doua roi cu canal profilat (barbotine), care angreneaza lanul de ancor tensionat. Pe acelai
arbore principal, pentru legare exist tamburi de capt, pentru manevra parmei cu capt liber. n
situaia n care pentru ancorare se folosete o parm metalic sau nemetalic, aceasta se
nfoar pe un tambur cilindric montat n locul barbotinei.
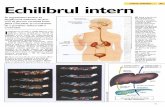
Fig. 3.3.5 Nav cargou de mrfuri generale - amenajarea prova: vinci de ancor cu tambur de acostare i
tambur hiperboloidal de capt
Mainile cu ax orizontal sunt denumite vinciuri iar cele cu ax vertical, cabestane. n prova
navelor vinciurile sunt de obicei duble, dispunnd de dou barbotine, pentru cele doua ancore
-
UI 3: Instalaii navale de punte
135
prova i de doi tamburi de capt pentru manev. n fig. 3.3.5 este reprezentat schema de
amenajare prova pentru o nav cargou de mrfuri generale.Funcionarea sistemului de manevr
legare este asigurat de ctre partea de depozitare a parmei tamburului de acostare 1 (storage
part of the mooring drum) care permite nfurarea parmei de acostare i de seciunea activ de
lucru a tamburului 2 (pulling section of the drum, working part). n cazul manevrelor
direcionarea parmelor se realizeaz prin intermediul rolelor de ghidare 14 i 16. Funcionarea
sistemului este asigurat de acionarea electrohidraulic 5 (electro-hidraulic motor) iar
demultiplicarea turaiei de ctre reductorul 4 (gearbox). Atunci cnd este necesar, controlul
operaiunilor revine frnei cu band 3 (brake band). Dup cum am precizat i n unitatea de
studio anterioara celelalte elemente sunt: 6 - tamburul hiperboloidal de capt (warping head); 7-
direcionarea lanului prin intermediul barbotinei (chain in the gypsy wheel); 8 - cuplajul cu
gheare (dog clutch); 9 - ancora (anchor); 10 - tubul lanului de ancor (hawse pipe); 11 - tubul
puului de lan (spurling pipe); 12 - puul lanului (chain locker); 13 - stopa de lan cu
echipament de siguran (chain stopper with security device); 15 - baba (bollard); 17 - puntea
navei (deck); 18 - gur de vizitare a puului de lan (hatch to chain locker).
Vinci de ancorare-acostare
n cazul acestui vinci elementele componente pot asigura att manevrele de ancorare ct
i pe cele de manevr-legare. La bordul unei nave ntlnim vinciuri cu auto-recuperare (self
stowing mooring winch) care este un vinci de acostare prevazut cu un tambur pe care se
infasoara o sarma sau o parama care este recuperata permanent. Vinciul cu de tensiune (tension
winch) este un vinci cu auto-recuperare prevazut cu un dispozitiv ce poate fi reglat sa ajusteze
permanent tensiunea intr-o srm sau parm de acostare.
Tamburul cilindric nlocuiete barbotina la vinciurile de ancor, la care se utilizeaz
parme metalice sau nemetalice i se folosete ntotdeauna pentru vinciurile de legare sau de
remorcare. Captul inactiv al parmei este fixat de tambur, spirele nfurndu-se alturat, n
unul sau mai multe straturi. Spre deosebire de vinci, cabestanul, fig. 3.3.7, are doar un capt liber
al axului principal, pe care se pot monta barbotina i tamburul de manevr.
Fig.3.3.6 Vinci de ancorare-acostare: 1. main shaft (arbore principal); 2. gearbox (reductor); 3. electric motor (electromotor) 4. tambur de capt (warping drum); 5. tambur, zona de depozitare (drum, storage part); 6. tambur,
zona de lucru (drum, working part); 7. barbotin ( gypsy wheel); 8. maneta de control pentru frna cu band (control
lever for the band brake); 9 - tensioner (ntinztor).
-
UI 3: Instalaii navale de punte
136
Cabestanele au ntotdeauna tamburi de capt pentru manevr, pot avea barbotin i nu au
tamburi cilindrici. Dup cum se observ i n fig. 3.3.7 captul inferior al arborelui principal al
unui cabestan poate traversa puntea, permind amplasarea sub punte a reductorului i
electromotorului de acionare, ceea ce prezint avantaje n privina economiei de spaiu la orice
nav i a protejrii mainii, la navele militare.
n cazul acionrii electrohidraulice, maina de ancor dispune pe punte de un
hidromotor, restul instalaiei fiind amplasat centralizat. Pentru virarea parmelor de legare pot fi
utilizate att mecanisme de manevr speciale, instalate n acest scop (vinciuri sau cabestane de
manevr), ct i alte mecanisme de punte (de exemplu vinciul de ancor sau vinciuri de
ncrcare) avnd tamburi de manevra. Alegerea numrului i tipului mecanismelor de legare se
las la aprecierea armatorului i proiectantului cu condiia ca:
3/rFT (3.3.29)
Fig. 3.3.7 Cabestan : 1 - tamburul cabestanului; 2 motorul de acionare; 3 barbotin; 4 reductor.
unde: T este fora nominal de traciune a mecanismului de legare; Fr este fora total de rupere a
parmelor de legare adoptate pentru dotarea navei.
La navele cu numr mare de ancorri (nave pentru navigaia interioar, nave pentru
cercetri oceanografice etc.) exist posibilitatea acionrii de la distan a mecanismului de
ancorare. La navele comerciale mari destinate transportului de mrfuri, la care calibrul lanului
este de ordinul a 80 mm se folosesc cabestane i n prova.
Vinciuri de legare sau remorcare cu comanda automat
Exist situaii n exploatarea navelor n care lungimea parmei este variabil, pentru a nu
permite depirea forei maxime de ntindere sau pentru a amortiza eforturile aplicate dinamic.
n cazul navei legate la cheu, datorit variaiei rapide a pescajului la ncrcare-descrcare
sau datorit mareelor, lungimea parmei de legare este variabil, aspect care impune meninerea
tensiunii nominale, constante. n cazul remorcrii pe mare agitat, pentru amortizarea ocurilor
datorate aciunii valurilor, lungimea parmei de remorcare variaz n funcie de frecvena
valurilor, dupa o lege armonic:
tlll rt cos0 (3.3.30)
unde: lt este lungimea parmei la momentul t, l0 lungimea nominal a parmei iar lr este
amplitudinea de variaie a lungimii parmei pentru a realiza efectul de amortizare.
Viteza instantanee de virare a parmei este:
-
UI 3: Instalaii navale de punte
137
tldt
dlv r
t
v sin (3.3.31)
cu valoarea maxim:
rv lv max (3.3.32)
n aceste condiii, pentru ca vinciul s poat funciona, este nevoie de un sistem automat a
crui mrime de intrare s fie tensiunea de parm iar comanda de execuie s fie dat pentru
nfurarea sau desfurarea parmei la tamburul vinciului.
n diagrama RT= RT (v) din fig. 3.3.8, starea de echilibru remorcher - parm - convoi
corespunde punctului A, pentru care ansamblul se deplaseaz cu viteza v0, la vinciul de
remorcare avnd tensiunea T0. Dac, datorit deplasrii pe valuri, viteza remorcherului vr scade
fa de cea a convoiului vc, vinciul automat trebuie s nfoare parma, pentru a asigura
tensiunea T1 ntre remorcher i convoi. Viteza de virare a parmei este egal cu viteza relativ
dintre convoi i remorcher:
rcv vvv (3.3.33)
iar puterea vinciului automat va fi:
t
vv
vTP
1 (3.3.34)
n diagrama din fig. 3.3.8, puterea util de virare automat este reprezentat de aria
haurat. Funcionnd la valori mari ale tensiunii periferice la tambur i la viteze apreciabile,
vinciurile de manevr automate au puteri de acionare mult mai mari dect cele ale vinciurilor cu
comand manual. Acionarea vinciurilor de legare i remorcare cu comand automat este
realizat electromecanic sau electrostatic. n lanul cinematic al vinciului automat trebuie s
existe un dispozitiv care, n cazul creterii brute a tensiunii din parm, s permit desfurarea
acesteia cu o lungime determinat, astfel nct s nu depeasc cu mai mult de 10 % valoarea
nominal. Lungimea parmei de remorc desfurate datorit creterii sarcinii trebuie s fie
limitat astfel: lr = (10.150) m pentru nave fluviale; lr = (50..150) m pentru nave maritime.
Fig. 3.3.8 Determinarea puterii utile de virare a unui vinci de legare/ remorcare cu comanda automat
Valoarea exact lr depinde de valoarea lo. Dup desfurarea parmei cu lungimea lr
dinainte impus, funcionarea automat a vinciului trebuie sa nceteze complet. Conducerea
vinciului trebuie s se poat realiza att automat, ct i manual, dupa dorin.
-
UI 3: Instalaii navale de punte
138
Tem pentru studiu 3.3.4: Recomandm nsuirea i nelegerea termenilor de
specialitate (att n limba romn ct i n limba englez) asociai figurilor reprezentate in
cadrul unitatilor destudiu care abordeaza problema instalailor de ancorare, manevra legare si
remorcare.
3.3.5 TESTE DE AUTOEVALUARE
1. n condiiile n care: fora total de rupere a parmelor de legare adoptate pentru dotarea navei
este ]_[150 kNFr iar viteza de virare min]/_[10 mvv i randamentul sistemului %80t .
Puterea util de virare a vinciului, Pv este:
a) 58, 7 Kw; b) 31,25 kW; c) 13,7 kW; d) 23 kW.
3.2.9 LUCRARE DE VERIFICARE
1. Detaliati rolul fiecarui element prezentat in fig.3.3.5.
2. Care sunt operaiunile de baz pe care le execut vinciurile de ancorare.
3.2.10 RSPUNSURI LA TESTELE DE AUTOEVALUARE
1. B.
3.2.11 BIBLIOGRAFIE
1. DNV, 2011. Marine and Machinery Systems and Equipment Offshore Standard. Det Norske
Veritas AS. The electronic pdf version of this document found through http://www.dnv.com is
the officially binding version, DNV-OS-D101.
2. Erdem, B., 2009. Naval Architect, MSc Deck machineries: Windlass and winches on board
offshore and ashore. http://www.deniz.ktu.edu.tr/Gemi_Insaati_Muh/Deck.pdf.
3. House, D.J., 2006. Anchor Practice: A Guide for Industry, London, Witherby & Co. Lt.,
ISBN 1-8560-9212-7.
4. House, D.,J., 2004. Seamanship Techniques 3rd Edition for: Shipboard & Maritime
Operations. Elsevier Linacre House, Jordan Hill, Oxford OX2 8DP 200 Wheeler Road,
Burlington, MA 01803, ISBN 0 7506 6315 4.
-
UI 3: Instalaii navale de punte
139
5. Ioni, I.C., Apostolache, J., 1986. Instalaii navale de bord, Construcie i exploatare. Editura
Tehnic, Bucureti, 1986.
6. Lloyd, Capt. M., 2006. The Pocket Book of Anchoring. Witherby Seamanship International
Ltd, ISBN 9781905331451.
7. McGeorge, H., D., 2002. Marine Auxilary Machinery. Elsevier Science, Linacre House,
Jordan Hill, Oxford OX2 8DP, Wildwood Avenue, Woburn, MA 01801-2041, ISBN 0 7506
4398 6.
8. Taylor, D., A., 1996. Introduction to Marine Engineering. Elsevier Butterworth Heinemann
Linacre House, Jordan Hill, Oxford 0X2 80F 200 Wheeler Road, Burlington, MA 01803, 1996.
9. Stnescu, C., A., Talpo, S., Dafinei, A., 2010. Mecanic Fizic. "Proiectul pentru
nvmntul Rural", proiect co-finanat de ctre Banca Mondial, Guvernul Romnieii
comunitile locale.
10. ***, http://forshipbuilding.com/types-ships/.