Dispozitiv de Prehensiune Antropomorfic (Dobas)
18
Dispozitiv de prehensiune antropomorfic cu comandă vocală Universitatea Politehnica Timişoara Facultatea de Mecanica Secţia Mecatronică Profil Roboţi Industriali Profesor Coordonator: s.l. dr. ing. Diaconu Aurel Student: Dobaş Florin-Silviu 1
-
Upload
lavinia-angelescu -
Category
Documents
-
view
64 -
download
6
Transcript of Dispozitiv de Prehensiune Antropomorfic (Dobas)

Dispozitiv de prehensiune antropomorfic
cu comandă vocală
Universitatea Politehnica Timişoara
Facultatea de Mecanica
Secţia Mecatronică
Profil Roboţi Industriali
Profesor Coordonator:
s.l. dr. ing. Diaconu Aurel
Student:
Dobaş Florin-Silviu
1

Dobaş Florin - Dispozitiv de prehensiune antropomorfic cu comandă vocală 2
Noţiuni teoretice,satdiul actual-Studiu, documentare
Schema bloc a sistemului de conducere-Stabilirea aplicaţiei
Lista componente sistem conducere-Achiziţii
Variante constructive-Modelarea dispozitivului de prehnsiune
Modelarea standului –Modelarea şi fabricarea demonstratorului
Servomotorul , modulul de comandă-Programarea, testarea
Direcţii de dezvoltare-Concluzii,întocmirea documentaţiei tehnice

Dobaş Florin - Dispozitiv de prehensiune antropomorfic cu comandă vocală 3
Dispozitiv de
ghidare
Dispozitiv
de
prehensiune

Dobaş Florin - Dispozitiv de prehensiune antropomorfic cu comandă vocală 4
•efector final
•cap de forţă
•element de precizie
•element senzorial
•mijloc de comunicare
“Instrumentul instrumentelor”-Aristotel

Dobaş Florin - Dispozitiv de prehensiune antropomorfic cu comandă vocală 5
Prehensiune de forţă Prehesiune prin formă Prehensiune de precizie
Obiecte cilindrice Obiecte sferice Obiecte mici
Principalele tipuri de prehensiune
Prehensiune de fineţe
Diverse
-principala funcţie a mâinii

Robotul Justin
cu 4 degete
Sistem antropomorfic braţ-mână
cu 5 degete
6
DLR(Deutschen Zentrums für Luft)
Dobaş Florin - Dispozitiv de prehensiune antropomorfic cu comandă vocală

Dobaş Florin - Dispozitiv de prehensiune antropomorfic cu comandă vocală 7
Proteză de mână a lui Götz von Berlichingen, 1509
Proteză din otel, cu degete articulate1850-1910, acţioare cu cablu şi arcuri
Proteză de lemn cu degete articulate, secolul 19, acţionare prin cabluri şi bretele ataşate pe spate şi umăr
Proteza partiala de mana functionala simpla, cu acţionare electrică, anii 80
Proteza de mana I-limb Pulse, 2010 Greutate 450 g, 2 falange , acţionare electrică, sistem de comandă mioelectric
Evolu
ţie în
timp

Dobaş Florin - Dispozitiv de prehensiune antropomorfic cu comandă vocală 8
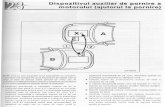
Sistem acţionare Sistem comandă DPA
Placă
de dezvoltare
Modul comandă
vocală
Servomotor 1
Servomotor 6
Deget 1
Servomotor 2
Închide!
Deget 2
Deget 5
Tx
Rx
voce
O.U.

Nr.crt Componenta Imagine Nr. Buc.
1 Placa de
dezvoltare
1
2 Modulul
cu microcontroler
1
3 Servomotor
standard
6
4 Modulul
de comanda vocala
1
Dobaş Florin - Dispozitiv de prehensiune antropomorfic cu comandă vocală 9

Dobaş Florin - Dispozitiv de prehensiune antropomorfic cu comandă vocală 10
Varianta 1
Degete
cu cuple de
rotaţie
Falanga
mediană

Dobaş Florin - Dispozitiv de prehensiune antropomorfic cu comandă vocală 11
Varianta 2
Degete cu
arcuri
lamelare

Dobaş Florin - Dispozitiv de prehensiune antropomorfic cu comandă vocală 12
Varianta 3
Degete cu
arcuri
lamelare din
plastic
Avantaje
economice

Dobaş Florin - Dispozitiv de prehensiune antropomorfic cu comandă vocală 13
Modelarea
standului
experimental
-poziţionarea
ghidajelor firelor
-poziţionarea
servomotoarelor

Dobaş Florin - Dispozitiv de prehensiune antropomorfic cu comandă vocală 14
Servomotoarele sunt comandate în PWM
Comanda de bază: PULSOUT, Pin ,durată
Argumentul durată determină poziţia unghiulară a servomotorului
standard

Dobaş Florin - Dispozitiv de prehensiune antropomorfic cu comandă vocală 15
Modulul “Say It”- înregistrează comenzile vocale
-generează programul de bază
-modul de comandă
Programul de bază
Comanda_1 Program 1
Comanda_2 Program 2
“Închide” Program R
Program 32 Comanda_32
Program R:
For timp 1 TO 220
PULSOUT 15, 750
PULSOUT 14, 750
.........
PULSOUT 10, 750
Pause 20
Next

Dobaş Florin - Dispozitiv de prehensiune antropomorfic cu comandă vocală 16
Efector final Proteză Stand
Experimental

17 Dobaş Florin - Dispozitiv de prehensiune antropomorfic cu comandă vocală
Vă mulţumesc!

Dispozitiv de prehensiune antropomorfic
cu comandă vocală
Universitatea Politehnica Timişoara
Facultatea de Mecanica
Secţia Mecatronică
Profil Roboţi Industriali
Profesor Coordonator:
s.l. dr. ing. Diaconu Aurel
Student:
Dobaş Florin-Silviu
18