
Dieta young-miracolul-p h-pentru-o-sanatate-perfecta-transfer-ro-05apr-417e8e
1/16/2015
1
Soluţia generală a ecuaţiei neomogene (3.142) este
formată din două componente: o componentă a regimului
liber xl(t) - soluţia ecuaţiei omogene (3.144) corespunzătoare
ecuaţiei (3.142) şi o componentă a regimului forţat
xf(t) - soluţia particulară a ecuaţiei neomogene (3.142).
Soluţia ecuaţiei omogene se determină cu relaţia (3.167)
)( x 0) , - (t = (t) xl
Soluţia particulară a ecuaţiei neomogene se determină prin
metoda variaţiei constantelor. Se scrie
q(t) 0) , - (t = (t) x f în care q(t) este un vector ce se va determina din condiţia
ca xf(t) din (3.217) să satisfacă ecuaţia (3.142).
. u(t) B + q(t) 0) , - (t A = (t) q 0) , - (t + q(t) 0) , - (t = (t) x f
Tinând seama de proprietatile matricei de tranzitie,
conform relatiilor (3.172), (3.173) rezulta
u(t) B 0) t,-( = u(t) 0)B ,-(t = (t)q
u(t) B + q(t) 0) ,-(t A = (t)q 0) ,-(t + q(t) 0) ,-(t A = (t) x
-1
f
. d )u( 0)B , - ( = q(t)t
(3.218)
Înlocuind (3.218) în (3.217) se obtine solutia regimului fortat
. d )u( 0)B ,-(t = d )u( 0)B ,-(0) ,-(t = (t) xtt
f (3.219)
Solutia generala a ecuatiei (3.142) va fi de forma
(3.220), numita formula variatiei constantelor.
1/16/2015
2
. d )u( 0)B ,-(t + )x( 0) ,-(t = (t)x + (t)x = x(t)t
fl (3.220)
Daca se utilizeaza expresia (3.161) a matricei de tranzitie,
solutia (3.220) a ecuatiei neomogene se poate scrie
. )dBu(e + )x(e = x(t) )-A(tt
)-A(t
(3.221)
Înlocuind x(t) din (3.220) sau (3.221) în ecuatia de iesire
(3.143) se obtin relatiile care exprima tranzitia intrare-iesire.
. Du(t) +] d )u( B 0) ,-(t + )x( 0) ,-(t [ C = y(t)t
. u(t) D +] )du( Be + )x( e [ C = y(t) )-A(tt
)-A(t
(3.222)
(3.223)
Daca momentul initial este τ = 0 si în plus x(0+) = 0,
conditiile initiale sunt nule, relatiile (3.221), (3.223) devin
)du( Be = x(t) )-A(tt
u(t) D + )dBu(e C = y(t) )-A(tt
(3.224)
(3.225)
Expresiile (3.220), (3.221) si (3.222), (3.223) furnizeaza
vectorul de stare si respectiv vectorul de iesire al sistemului
pentru orice t τ 0 plecând dintr-o stare initiala arbitrara x(τ),
pentru o marime u(t) aplicata la intrare pe intervalul [τ,t].
Relatiile (3.220) - (3.225) ramân valabile si pentru sistemele
monovariabile descrise în limbaj intrare-stare-iesire, matricele B
si C fiind înlocuite cu vectorii b si cT iar matricea D cu constanta
d, adica
)du( be + )x(e = x(t) )-A(tt
)-A(t
. du(t) +] d )(u be + )x(e[ c = y)t) ) - (t At
)-A(tT
(3.226)
(3.227)
1/16/2015
3
3.2.1.5. Matricea de raspuns la impuls.
Se considera un sistem monovariabil propriu (d = 0).
Se presupune τ = 0 si x(0) (conditii initiale nule). Atunci din
(3.226), (3.227) rezulta
d )u( b e = x(t) )-A(tt
0
. d )u( b e c = y(t) )-A(tt
0
T
(3.228)
(3.229)
Daca marimea de intrare u(t) este impulsul Dirac δ(t) se
stie ca
. f(0) = d )( )( f = d )( )( f-
t
0
(3.230)
Se noteaza cu h(t) raspunsul sistemului y(t) obtinut în
aceste conditii. Din (3.229) rezulta
În cazul sistemelor multivariabile proprii (D = 0), se
considera ca vectorul de intrare are toate componentele
egale cu impulsul Dirac
bec = h(t) AtT(3.231)
(t)1 = (t)
1
1
1
= u(t)
(3.232)
unde 1 este un vector Rm cu componente unitare.
Înlocuind (3.232) în (3.225) se obtine matricea
raspunsului la impuls, de dimensiune pxm
. BCe = h(t) At(3.233)

1/16/2015
4
Coloana de indice i a lui h(t) se determina aplicând un
impuls Dirac δ(t) la intrarea ui(t), celelalte intrari fiind
nule, si observând evolutia iesirilor y1(t), y2(t), ..., yp(t).
3.2.1.6. Matricea de transfer
Aplicând transformata Laplace directă, pentru condiţii
iniţiale nule x(0) = 0, τ = 0 în ecuaţiile (3.142), (3.143) se
obţine
BU(s))A - (sI = X(s)-1
. H(s)U(s) = D]U(s) + B)A - [C(sI = Y(s)-1
(3.234)
(3.235)
Ecuaţia (3.235) se obţine şi direct din relaţia (3.225) în
care se aplică transformata Laplace. Matricea H(s) de
dimensiuni p x m evidenţiată în ecuaţia de ieşire (3.235),
se numeste matrice de transfer, definită prin expresia
D + B)A - C(sI = H(s)-1
(3.236)
Elementele matricei de transfer H(s) sunt fracţii raţionale în
s cu numitorul de grad n şi numărătorul de grad m n.Matricea de transfer H(s) este transformata Laplace a
matricei de răspuns la impuls
(t)D + BCe L = D + B )A - (sI C = L{h(t)}= H(s) At-1
. (t)D + (t)BCe = {H(s)}L = h(t) At 1
(3.237)
Observaţie: În cazul sistemelor monovariabile matricea de
transfer se reduce la funcţia de transfer. În acest caz
(3.236) devine
. d + b)A - (sIc = H(s)-1T (3.238)
Exemplul 3.10. Se consideră sistemul dinamic liniar
multivariabil constant, definit de ecuaţiile

1/16/2015
5
xşi
.
. x
x
1-1
01 =
y
y
u
u
1-0
01 +
x
x
1-1-
64 =
x
x
2
1
2
1
2
1
2
1
2
1
Să se calculeze matricea de transfer şi matricea de răspuns la impuls
ale acestui sistem. Se calculează (sI - A)-1 aplicând algoritmul
Leverrier-Fadeev, pentru n = 2. Se scrie
4-s1-
61+s
2 + 3s - s
1 =
= 4-1-
61 + s
10
01
2 + 3s - s
1 = B + sB
(s)
1 = )A - (sI
2
201-1
2 = 2-0
02- tr
2
1- = )ABtr(
2
1- = ,
4-1-
61 = I + B A = B
3- = 1-1-
64 tr - = )AB( tr- = ,
10
01 = I = B
00110
111
Matricea de răspuns la impuls se calculează cu relaţia (3.237.b)
e8-e9e4+e3-
e6-e6e3+e2- =
2+3s-s
10-s
2+3s-s
2+s
2+3s-s
6-
2+3s-s
1+s
L = H(s)L = h(t)2tt2tt
2tt2tt
22
22
11
3.2.1.7. Transformări liniare în spaţiul stărilor.
Echivalenţa sistemelor dinamice.
xx
x
şi
.
Ecuaţia omogenă (3.144) exprimă o transformare liniară a
spaţiului stărilor X în el însuşi. A este matricea acestei
transformări. Vectorii x si sunt exprimaţi în aceeaşi bază de
vectori din X. Dar spaţiul stărilor X admite o infinitate de baze de
vectori, toate legate între ele prin transformări liniare nesingulare.
Schimbarea bazei de vectori din X este echivalentă cu o
transformare liniară operată asupra vectorului de stare .
x
1/16/2015
6
Fie P o matrice (n x n) nesingulară care defineşte o transformare
a vectorului de stare sub forma x
0 P ,Px = x det~ (3.239)
unde x~ este noul vector de stare. Din (3.239) rezulta
. xP = x -1~ (2.340)
Daca în ecuatiile intrare-stare-iesire (3.142), (3.143) ale
sistemului dinamic liniar constant se înlocuieste x din
(3.240) acestea devin
u B + x A = x~~~~
u D + x C =y ~~~
(2.341)
(2.342)
D = D
CP = C
PB = B
PAP = A
-1
-1
~
~
~
~
(2.343)în care
)~
,~
,~
,~
( DCBA
)~
,~
,~
,~
(~ ),,,( DCBADCBA
Definitia 3.1. Doua sisteme dinamice (A,B,C,D) si
se numesc echivalente, notându-se
, daca exista o matrice nesingulara P astfel încât au loc relatiile
(3.243).
Se verifica usor ca ~ este o relatie de echivalenta, adica este
reflexiva, simetrica si tranzitiva. Se constata de asemenea ca
doua sisteme echivalente au aceeasi dimensiune.
Sistemele dinamice liniare invariante echivalente sunt
caracterizate prin invarianta polinomului caracteristic, a
matricelor de transfer, de raspuns la impuls si a
raspunsului liber la transformarile liniare nesingulare ale
vectorului de stare.
Se considera polinoamele caracteristice ale doua sisteme
echivalente. Sa se arate ca cele doua polinoame sunt
identice.
1/16/2015
7
A) - (sI = (s) det . )A - (sI = (s)~
det~ (3.245)
. (s) P x A) - (sI x P
PA) - P(sI )PAP - sPP(
)PAP - (sI )A - (sI (s)
-1
-1-1-1
-1
detdetdet
detdet
det~
det~
(3.246)
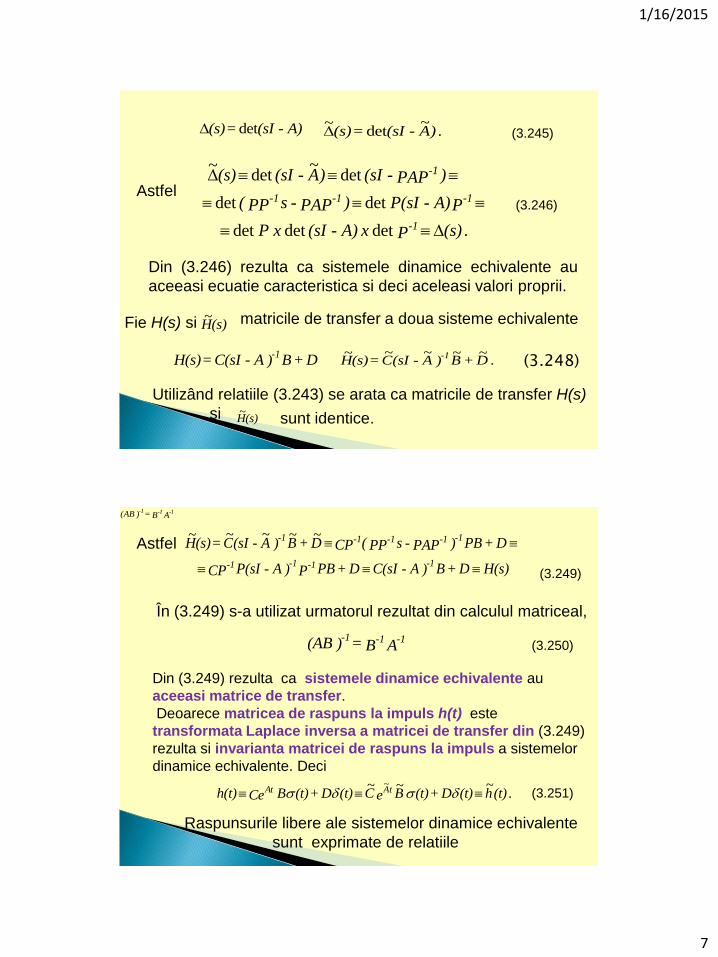
Din (3.246) rezulta ca sistemele dinamice echivalente au
aceeasi ecuatie caracteristica si deci aceleasi valori proprii.
matricile de transfer a doua sisteme echivalente
(s)H~
Fie H(s) si
D + B)A - C(sI = H(s)-1
. D + B)A - (sIC = (s)H-1 ~~~~~
(3.248)
Utilizând relatiile (3.243) se arata ca matricile de transfer H(s)
si sunt identice.
(s)H~
Astfel
H(s) D + B)A - C(sI D + PBP)A - P(sICP
D + PB)PAP - sPP(CP D + B)A - (sIC = (s)H
-1-1-1-1
-1-1-1-1-1
~~~~~
Astfel
(3.249)
În (3.249) s-a utilizat urmatorul rezultat din calculul matriceal,
AB = )(AB -1-1-1
AB = )(AB 1-1--1
(3.250)
Din (3.249) rezulta ca sistemele dinamice echivalente au
aceeasi matrice de transfer.
Deoarece matricea de raspuns la impuls h(t) este
transformata Laplace inversa a matricei de transfer din (3.249)
rezulta si invarianta matricei de raspuns la impuls a sistemelor
dinamice echivalente. Deci
. (t)h (t)D + (t) BeC (t)D + (t)B Ce h(t) tAAt ~~~ ~
(3.251)
Raspunsurile libere ale sistemelor dinamice echivalente
sunt exprimate de relatiile
1/16/2015
8
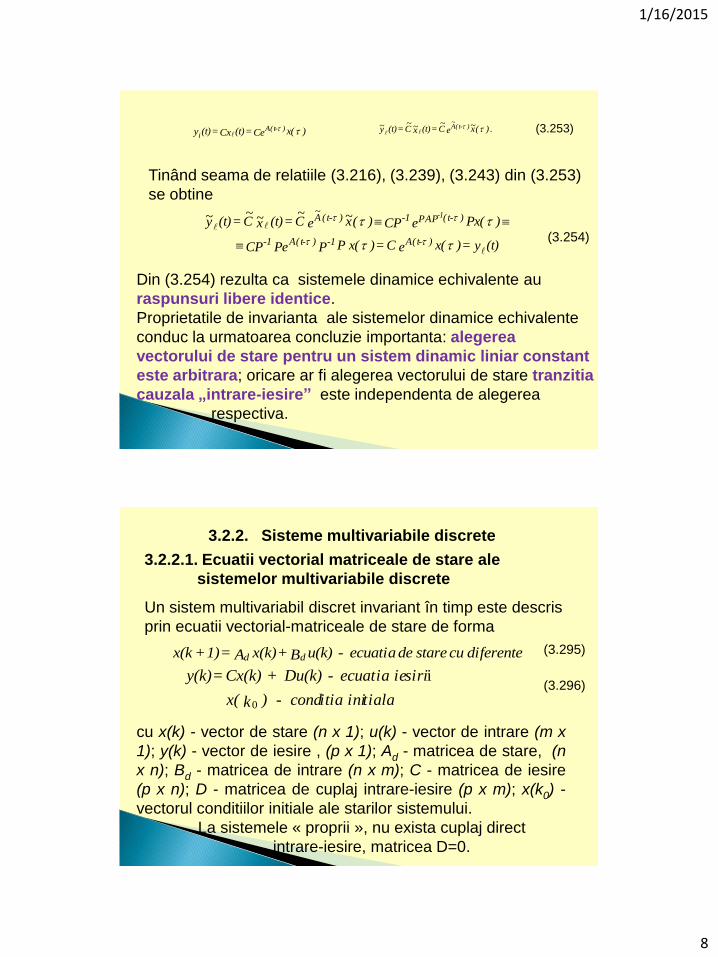
)x(Ce = (t)Cx = (t)y )-A(ti
. )(xeC = (t)xC = (t)y )-( tA ~~~~~
~
Tinând seama de relatiile (3.216), (3.239), (3.243) din (3.253)
se obtine
(3.253)
(t)y = )x( e C = )x( PP Pe CP
)Px( e CP )(x e C = (t) x C = (t)y
)-A( t1-)-A( t1-
)-( tPAP1-)-( t A -1
~~~~~~
(3.254)
Din (3.254) rezulta ca sistemele dinamice echivalente au
raspunsuri libere identice.
Proprietatile de invarianta ale sistemelor dinamice echivalente
conduc la urmatoarea concluzie importanta: alegerea
vectorului de stare pentru un sistem dinamic liniar constant
este arbitrara; oricare ar fi alegerea vectorului de stare tranzitia
cauzala „intrare-iesire” este independenta de alegerea
respectiva.
3.2.2. Sisteme multivariabile discrete
3.2.2.1. Ecuatii vectorial matriceale de stare ale
sistemelor multivariabile discrete
Un sistem multivariabil discret invariant în timp este descris
prin ecuatii vectorial-matriceale de stare de forma
diferentecu starede ecuatia - u(k)B + x(k)A = 1) + x(k dd
aialtitia ini) - condkx(
irisia ietecua - Du(k) + Cx(k) = y(k)
0
i
cu x(k) - vector de stare (n x 1); u(k) - vector de intrare (m x
1); y(k) - vector de iesire , (p x 1); Ad - matricea de stare, (n
x n); Bd - matricea de intrare (n x m); C - matricea de iesire
(p x n); D - matricea de cuplaj intrare-iesire (p x m); x(k0) -
vectorul conditiilor initiale ale starilor sistemului.
La sistemele « proprii », nu exista cuplaj direct
intrare-iesire, matricea D=0.
(3.295)
(3.296)

1/16/2015
9
Ecuatiile (3.295), (3.296) se pot reprezenta prin schema bloc
din fig. 3.21, în care ui(k), xj(k), yl(k) corespund respectiv
evolutiei unei intrari, a unei stari sau a unei iesiri oarecare.
Fig. 3.21
3.2.2.2. Solutia ecuatiei de stare. Matricea de tranzitie
Se presupune ca se cunoaste vectorul de stare al conditiilor initiale x(k0). Din ecuatia de stare
(3.295) se determina succesiv
. 1)-i+ku( B + 2)-i+ku( B A +...+ )ku( B A + )kx( A = i)+k( x
2)+ku( B + 1)+ku( B A + )ku( B A + )k( x A = 3)+k( x
1)+ku( B + )ku( B A + )kx( A = 1)+ku( B + 1)+kx( A = 2)+k( x
)ku( B + )k( x A = 1)+k( x
0d0dd0d-1i
d0id0
0d0dd0d2d0
3d0
0d0dd02d0d0d0
0d0d0
(3.297)
Notând k0 + i = k din ultima relatie (3.297) rezulta
k k ,u(i) B A + )k( x A = x(k) 0d-1i-k
d
-1k
k=i0
k-kd
0
0 (3.298)
j)-u(k B A + )kx( A = x(k) d-1j
d
k-k
1=j0
k-kd
00
sau
(3.299)
Relatia (3.298) (sau (3.299)) reprezinta solutia ecuatiei de stare
cu diferente si cuprinde doi termeni: primul
corespunde solutiei ecuatiei omogene - componenta
libera determinata de conditiile initiale x(k0);

1/16/2015
10
al doilea termen reprezinta solutia particulara a ecuatiei
neomogene - componenta fortata determinata de
marimea de intrare u(k).
Matricea Adk-k0 constituie matricea de tranzitie a sistemului
discret si are urmatoarele proprietati
A = A x A ; )k ,k( = )k ,k( )k ,k( ; I = A =
= (0,0) ; (k) = A = 0) (k, ; A = 0) ,k-(k = )k (k,
k-kd
k-kd
k-kd020112
0d
kd
k-kd00
020112
0
(3.300)
3.2.2.3. Tranzitia intrare-iesire. Matricea de
raspuns la impuls. Matricea de transfer
(3.301)
Înlocuind vectorul de stare x(k) din relatia (3.298) în
ecuatia iesirii (3.296) se obtine
k k u(k) D +] u(i) B 0) i,-1-(k + )kx( 0) ,k-(k [ C =
= u(k) D +] u(i) B A + )kx( A [ C = y(k)
0d
-1k
k=i00
di--1k
d
-1k
k=i0
k-kd
0
0
0
Daca marimea de intrare este impulsul unitar discret
1 k ,0 = (k) = u(k)
1 = (0) = u(0)
Relatia (3.301) exprima tranzitia intrare-iesire a unui sistem
multivariabil discret. În sistemelor monovariabile ecuatiile
(3.295) - (3.301) ramân valabile, matricele Bd ,C si D se
inlocuiesc cu vectorii bd, cT , espectiv cu marimea scalara d.
Pentru un sistem monovariabil discret propriu (d = 0),
considerand k0 = 0 si x(k0) = 0 relatiile (3.298), (3.301) devin
u(i) b 0) i,-1-(k = u(i) b A = x(k) d
-1k
0=id
i--1kd
-1k
0=i
. u(i) b 0) i,-1-(k c = u(i) b A c = y(k) d
-1k
0=i
Td
i--1kd
-1k
0=i
T
(3.302)
(3.303)
(3.304)
1/16/2015
11
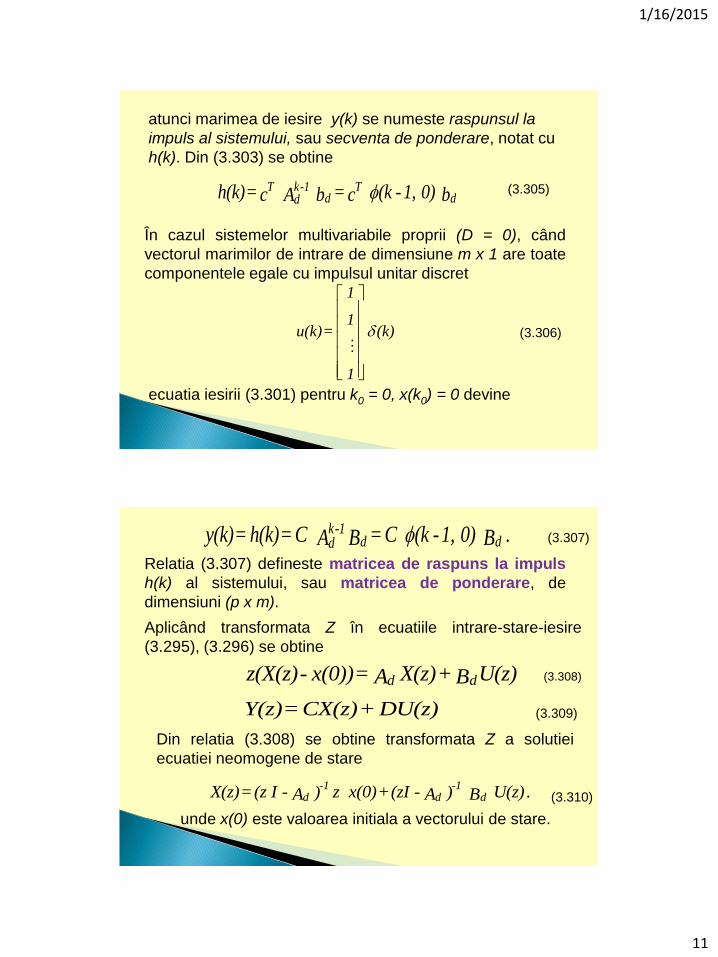
atunci marimea de iesire y(k) se numeste raspunsul la
impuls al sistemului, sau secventa de ponderare, notat cu
h(k). Din (3.303) se obtine
b 0) 1,-(k c = b A c = h(k) dT
d-1k
dT (3.305)
În cazul sistemelor multivariabile proprii (D = 0), când
vectorul marimilor de intrare de dimensiune m x 1 are toate
componentele egale cu impulsul unitar discret
(k)
1
1
1
= u(k)
(3.306)
ecuatia iesirii (3.301) pentru k0 = 0, x(k0) = 0 devine
. B 0) 1,-(k C = B A C = h(k) = y(k) dd-1k
d
U(z)B + X(z)A = x(0))-z(X(z) dd
DU(z) + CX(z) = Y(z)
(3.307)
(3.309)
(3.308)
Relatia (3.307) defineste matricea de raspuns la impuls
h(k) al sistemului, sau matricea de ponderare, de
dimensiuni (p x m).
Aplicând transformata Z în ecuatiile intrare-stare-iesire
(3.295), (3.296) se obtine
Din relatia (3.308) se obtine transformata Z a solutiei
ecuatiei neomogene de stare
. U(z) B )A - (zI + x(0)z )A - I(z = X(z) d-1
d-1
d (3.310)
unde x(0) este valoarea initiala a vectorului de stare.

1/16/2015
12
În cazul în care U(z) = 0, (u(k) = 0, sistemul este izolat fata de
intrari) din (3.310) se obtine
(z)X = x(0) (z) = x(0)z )A - I(z = X(z) l-1
d (3.311)
care este transformata Z a solutiei ecuatiei omogene
corespunzatoare ecuatiei de stare (3.295).
Matricea (z) = )A - z(zI-1
d (3.312)
este transformata Z a matricei de tranzitie a sistemului
liniar discret (k) Z= (k,0) Z= (z) (3.313)
Matricea Φ(z) se poate exprima prin seria
1 > |z | ,) A - I(z z = ... + A z + A z + I =
= ... + (2) z + (1) z + (0) = (z)
1-d
2d
2-d
1-
-2-1 (3.314)
Pentru conditii initiale nule, x(0) = 0, k0 = 0 din ecuatia
(3.310) se obtine transformata Z a componentei fortate
a functiei de tranzitie a starilor
U(z)B)A-(zI = (z)X = X(z) d-1
df (3.315)
a carei original, tinând seama si de (3.312) - (3.314), este
. u(i) B0) i,-1-(k = u(i) B A = (k) x d
-1k
0=id
i--1kd
-1k
0=if (3.316)
Înlocuind X(z) din (3.315) în ecuatia iesirii (3.309) se obtine
(3.317)
În ecuatia (3.317) se pune în evidenta matricea (p x m)
H(z) care se numeste matricea de transfer
discreta a sistemului multivariabil
H(z)U(z) = U(z)D + B)A-C(zI = DU(z)+U(z)B)A-C(zI = Y(z) d-1
dd-1
d
1/16/2015
13
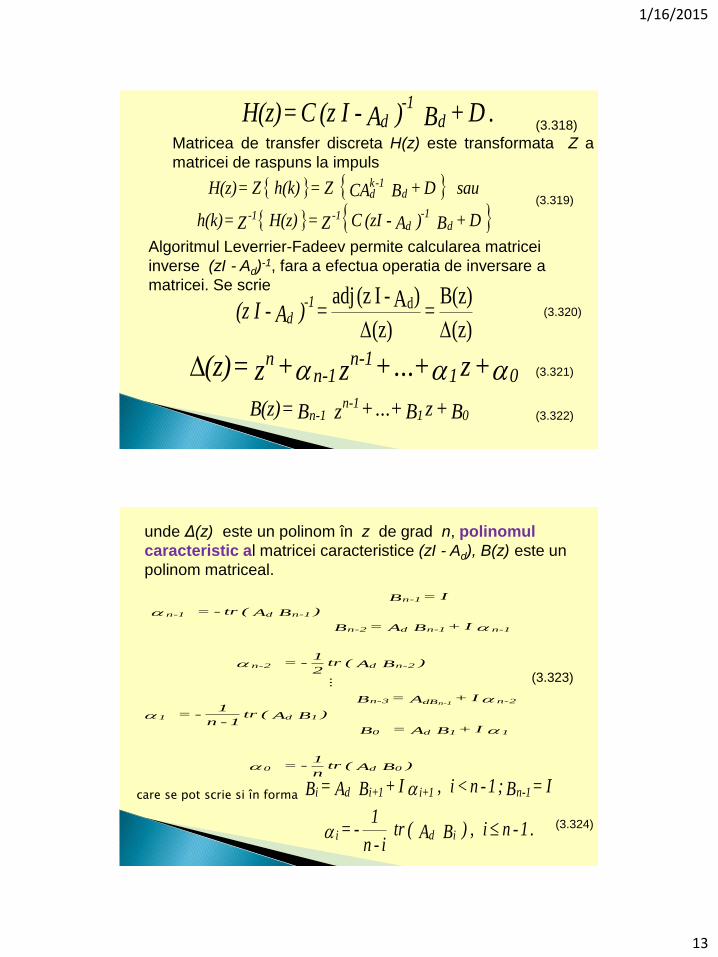
. D + B )A-I(z C = H(z) d-1
d (3.318)
Matricea de transfer discreta H(z) este transformata Z a
matricei de raspuns la impuls
D + B )A - (zI C Z = H(z) Z = h(k)
sau D + B CA Z= h(k) Z= H(z)
d-1
d-1-1
d-1k
d(3.319)
Algoritmul Leverrier-Fadeev permite calcularea matricei
inverse (zI - Ad)-1, fara a efectua operatia de inversare a
matricei. Se scrie
(z)
B(z) =
(z)
)A - I (z adj d
= )A-I(z
-1d
01-1n
-1nn +z+...+z+z = (z)
B +z B + ... + z B = B(z) 01-1n
-1n
(3.320)
(3.321)
(3.322)
unde Δ(z) este un polinom în z de grad n, polinomul
caracteristic al matricei caracteristice (zI - Ad), B(z) este un
polinom matriceal.
)B A( tr n
1 - =
I + B A = B
I + A = B
)B A( tr 1-n
1 - =
)B A( tr 2
1 - =
I + B A = B
I = B
)B A( tr - =
0d0
11d0
2-ndB3-n
1d1
2-nd2-n
-1n-1nd2-n
-1n
-1nd-1n
1-n
(3.323)
care se pot scrie si în forma
. 1-n i ,) B A ( tr i-n
1 - =
I = B ; 1-n < i , I + B A = B
idi
-1n1+i1+idi
(3.324)
1/16/2015
14
3.2.2.4. Sisteme esantionate. Discretizarea sistemelor
netede
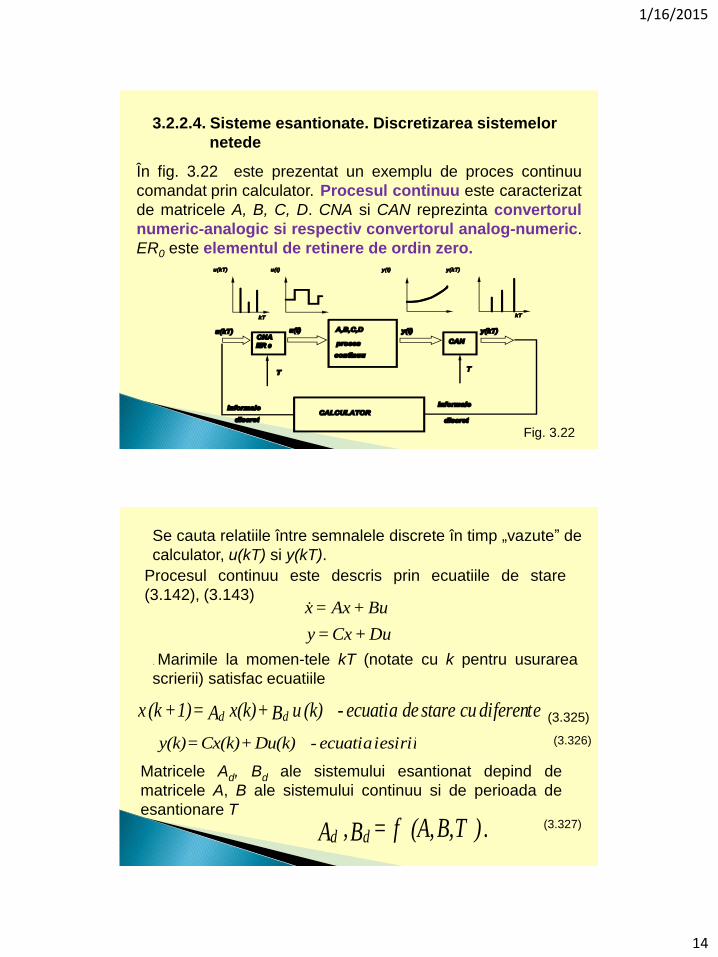
În fig. 3.22 este prezentat un exemplu de proces continuu
comandat prin calculator. Procesul continuu este caracterizat
de matricele A, B, C, D. CNA si CAN reprezinta convertorul
numeric-analogic si respectiv convertorul analog-numeric.
ER0 este elementul de retinere de ordin zero.
Fig. 3.22
Se cauta relatiile între semnalele discrete în timp „vazute” de
calculator, u(kT) si y(kT).
Procesul continuu este descris prin ecuatiile de stare
(3.142), (3.143)
Du+ Cx =y
Bu + Ax = x
. Marimile la momentele kT (notate cu k pentru usurarea
scrierii) satisfac ecuatiile
etdiferen stare cu ecuatia de - (k)u B + x(k) A = 1)+(k x dd
iesirii ecuatia - Du(k)+Cx(k) = y(k)
(3.325)
(3.326)
Matricele Ad, Bd ale sistemului esantionat depind de
matricele A, B ale sistemului continuu si de perioada de
esantionare T
. ) T B, (A, f = B ,A dd(3.327)
1/16/2015
15
Pentru un sistem continuu descris de ecuatiile (3.142),
(3.143), cunoscând starea sa în momentul de esantionare
tk = kT, conform relatiei (3.221) se poate determina starea
la momentul de esantionare urmator tk+1 = (k+1)T
)dBu(e+)tx(e = 1)+x(k = )tx( )-tA(t
t
k)t-tA(
1+k1+k
1+k
k
k1+k (3.328)
Datorita elementului de retinere de ordin zero plasat la intrarea
procesului continuu marimea de intrare u(t) este mentinuta
constanta pe durata perioadei de esantionare T, deci
. t ,t ,constant = u(k) = )tu( = u(t) 1+kkk (3.329)
Efectuând schimbarea de variabila τ = σ - tk si tinînd
seama ca tk+1 - tk = T, din (3.328) se obtine
Bu(k)de+e = 1)+x(k )-A(TT
0
AT (3.330)
Comparând relatiile (3.325) si (3.330) se deduce prin identificare
Bde = B ; e = A)-A(T
T
0d
ATd (3.331)
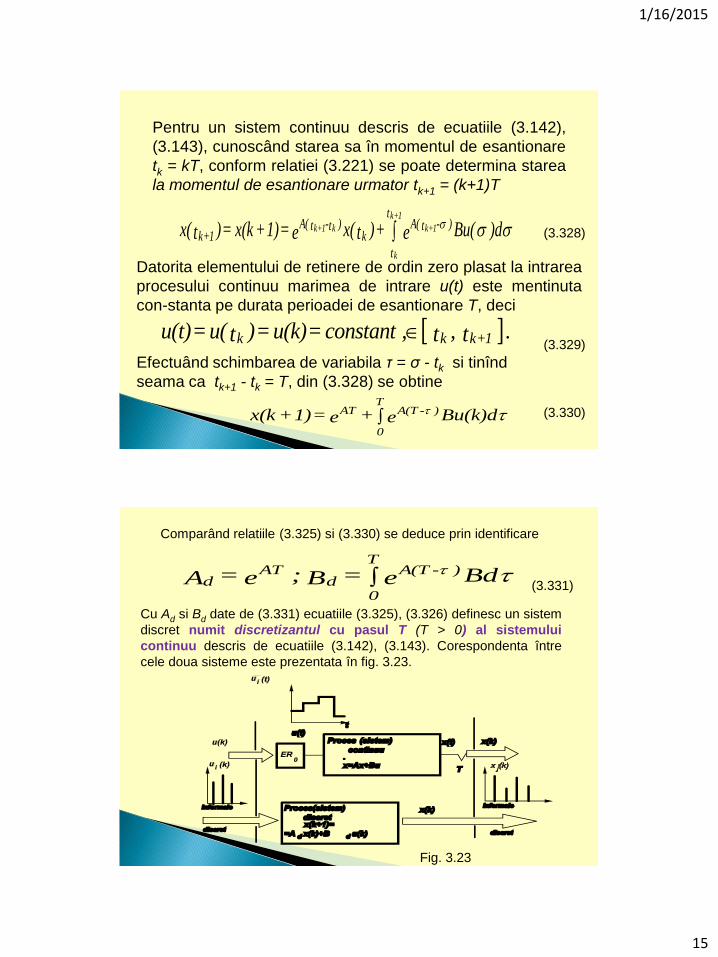
Cu Ad si Bd date de (3.331) ecuatiile (3.325), (3.326) definesc un sistem
discret numit discretizantul cu pasul T (T > 0) al sistemului
continuu descris de ecuatiile (3.142), (3.143). Corespondenta între
cele doua sisteme este prezentata în fig. 3.23.
Fig. 3.23

1/16/2015
16
Din figurile 3.22 si 3.23 rezulta ca raspunsurile y(t) (sau x(t))
sunt cele ale unui sistem supus la o functie scara .)(tu
Matricele Ad si Bd pot fi evaluate pe baza proprietatii de
dezvoltare în serie a matricei exponentiale eAT, conform
urmatoarelor relatii
)(ATi!
1 = e = A
i
0=i
ATd
. B )(AT1)!+(i
1 T = B
i
0=id
(3.332)
(3.333)
Daca exista A-1 relatia (3.333) se poate scrie si sub forma
. B I) - A( A = B I) - e( A = B d-1AT-1
d (3.334)
Relatiile (3.332) - (3.334) se pot programa usor pe un
calculator numeric.
Exemplul 3.12. Se considera un servomotor de curent
continuu cu excitatie constanta (cu magnet permanent),
comandat pe indus, ce antreneaza o sarcina prin intermediul
unui reductor cu un unghi θ(t), fig. 3.24.Servomotorul este inclus într-un sistem de reglare cu
esantionare a pozitiei θ(t) comandat de calculator conform
structurii din fig. 3.22.
Fig. 3.24
Sa se determine ecuatiile de stare si functia de transfer ale
sistemului discret, „vazut” de calculator, corespunzator
sistemului continuu, servomotor precedat de elementul de
retinere de ordin zero.
1/16/2015
17
Se stabileste mai întâi functia de transfer a sistemului
(procesului) continuu în timp. Se neglijeaza inductanta
indusului si se considera momentul de inertie J si coeficientul
de frecare k1 reduse la arborele motor.
Se considera ca marimea de intrare u(t) este tensiunea aplicata
indusului si ca marimea de iesire y(t) este pozitia unghiulara θ(t)
a rotorului servomotorului.
Se scriu succesiv ecuatiile
a) ecuatia de tensiuni a indusului
(1)(1)
aaa k = e ; k + Ri = e + Ri = u (3.335)
e - tensiunea electromotoare indusa.
b) ecuatia de echilibru a cuplurilor
(2)(1)
1(2)
fam J + k = J + m = i k = m (3.336)
mm - cuplul electromagnetic; mf - cuplul de frecari,
proportional cu viteza unghiulara θ(1)(t).
Eliminând marimile intermediare din (3.335), (3.336) se
obtine ecuatia diferentiala
u R
k =
R
k + k + J a
(1)2
1(2)
. (t)u b = (t) a + (t) a0(1)
1(2)
(3.337)sau
Aplicând transformata Laplace si considerând θ(1)(0) =
θ(0) = 0 din (3.337) se obtine functia de transfer a
sistemului continuu (servomotorului)
. )a + (s s
b =
(s)U
(s) =
U(s)
Y(s) = H(s)
1
0
a
(3.338)
1/16/2015
18
Pentru a stabili ecuatiile de stare continue ale
servomotorului se pleaca de la ecuatia diferentiala (3.337)
si se aleg ca variabile de stare pozitia θ(t) si viteza
unghiulara θ(1)(t)
. (t)x = y(t) y(t) = (t)
(t)u b + (t)x a- = (t)x (t)x = (t)
(t)x = (t)x (t)x = (t)
1
a02122(1)
211
Modelul de stare continuu este dat de ecuatiile
u(t) b
0 +
x
x
a-0
10 =
x
x
02
1
12
1
. 0 = x(0) ; (t)x
(t)x0] [1 =y
2
1
(3.340)
.0] [1 = c ; b = b
0 = B ;
a-0
10 = A T
01
Deci
(3.340)
Pentru a calcula eAT se aplica de exemplu metoda transformatei
Laplace inverse
a+s
10
)a+s(s
1
s
1
= a+s0
1-s = ]A-[sI
1
1
1
-1
-1
e0
)e-(1a
11
= ]A-[sIL = e
ta-
ta-
1-1-1AT
1
1
(3.341)
Tinând seama de (3.341) din (3.331) se obtine
1/16/2015
19
e0
)e-(1a
11
= e = A
Ta-
Ta-
1ATd
1
1
. b =
)e - (1a
1
e a
1 +
a
1 - T
a
1
b = d
eb
e-(1a
b
=
= b
0 d
e0
e-(1a
11
= B d e = B
d
Ta-
1
Ta-21
211
0
)-(Ta-0
)-(Ta-
1
0T
0
0)-(Ta-
)-(Ta-
1
T
0
)-(T AT
0
d
1
1
1
1
1
1
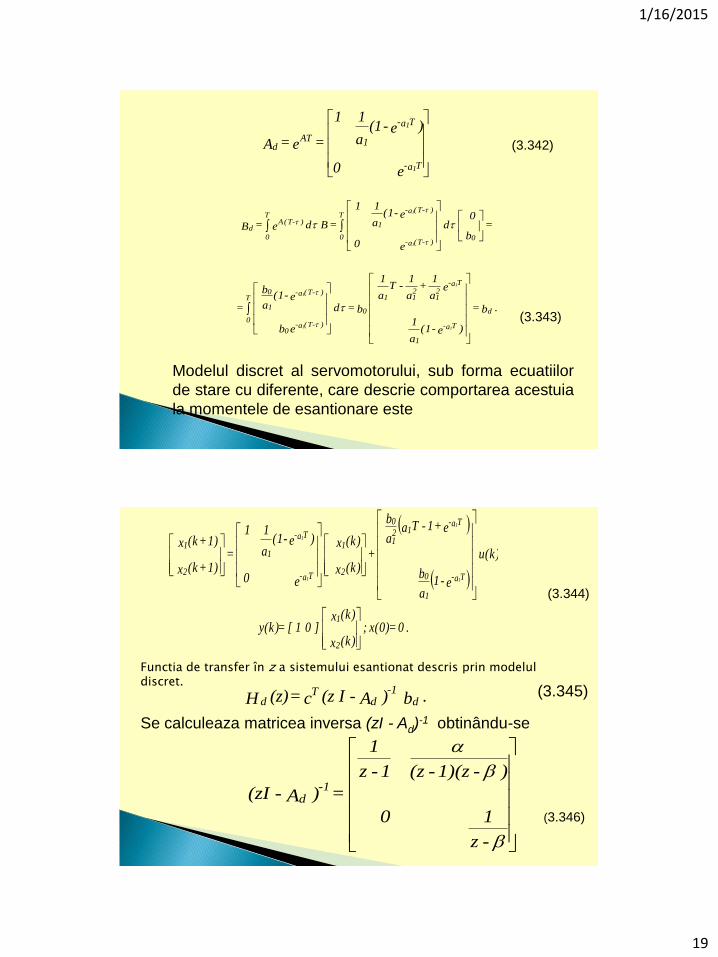
(3.342)
(3.343)
Modelul discret al servomotorului, sub forma ecuatiilor
de stare cu diferente, care descrie comportarea acestuia
la momentele de esantionare este
. 0 = x(0) ; (k)x
(k)x ] 0 1 [ = y(k)
u(k)
e-1a
b
e + 1 - Taa
b
+ (k)x
(k)x
e0
)e-(1a
11
= 1)+(kx
1)+(kx
2
1
Ta-
1
0
Ta-12
1
0
2
1
Ta-
Ta-
1
2
1
1
1
1
1
(3.344)
Functia de transfer în z a sistemului esantionat descris prin modeluldiscret.
. b )A - I(z c = (z) H d-1
dT
d(3.345)
Se calculeaza matricea inversa (zI - Ad)-1 obtinându-se
-z
10
)-1)(z-(z1-z
1
= )A-(zI-1
d
(3.346)
1/16/2015
20
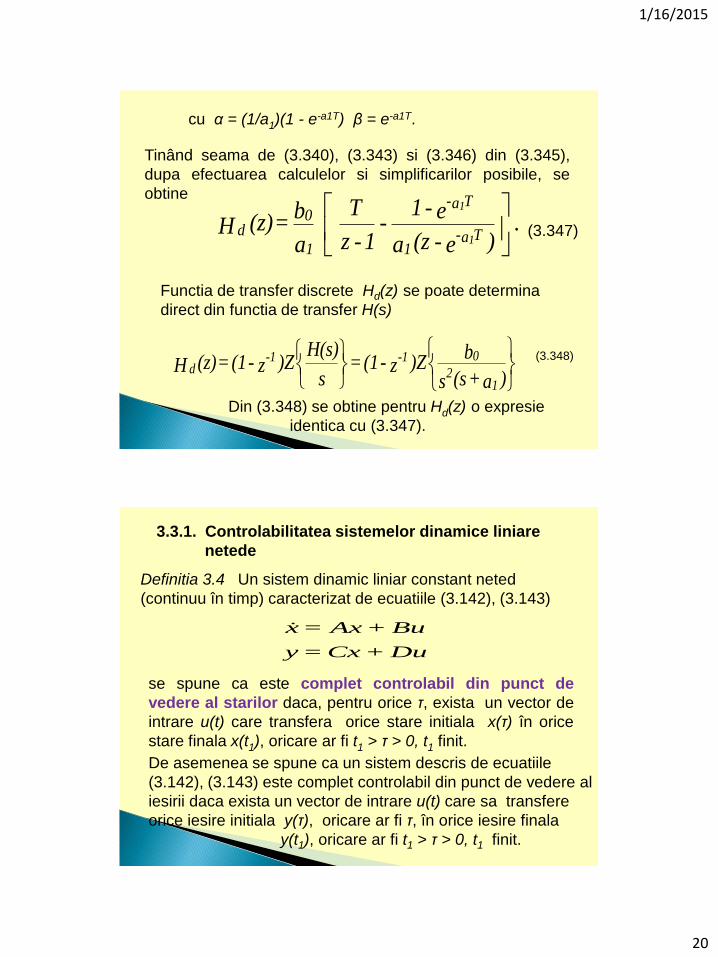
cu α = (1/a1)(1 - e-a1T) β = e-a1T.
Tinând seama de (3.340), (3.343) si (3.346) din (3.345),
dupa efectuarea calculelor si simplificarilor posibile, se
obtine
. )e -(z a
e - 1 -
1-z
T
a
b = (z) H Ta-
1
Ta-
1
0d
1
1
(3.347)
Functia de transfer discrete Hd(z) se poate determina
direct din functia de transfer H(s)
)a+(ss
b)Zz-(1 =
s
H(s))Zz-(1 = (z)H
12
0-1-1d
(3.348)
Din (3.348) se obtine pentru Hd(z) o expresie
identica cu (3.347).
3.3.1. Controlabilitatea sistemelor dinamice liniare
netede
Definitia 3.4 Un sistem dinamic liniar constant neted
(continuu în timp) caracterizat de ecuatiile (3.142), (3.143)
Du + Cx =y
Bu + Ax = x
se spune ca este complet controlabil din punct de
vedere al starilor daca, pentru orice τ, exista un vector de
intrare u(t) care transfera orice stare initiala x(τ) în orice
stare finala x(t1), oricare ar fi t1 > τ > 0, t1 finit.
De asemenea se spune ca un sistem descris de ecuatiile
(3.142), (3.143) este complet controlabil din punct de vedere al
iesirii daca exista un vector de intrare u(t) care sa transfere
orice iesire initiala y(τ), oricare ar fi τ, în orice iesire finala
y(t1), oricare ar fi t1 > τ > 0, t1 finit.
1/16/2015
21
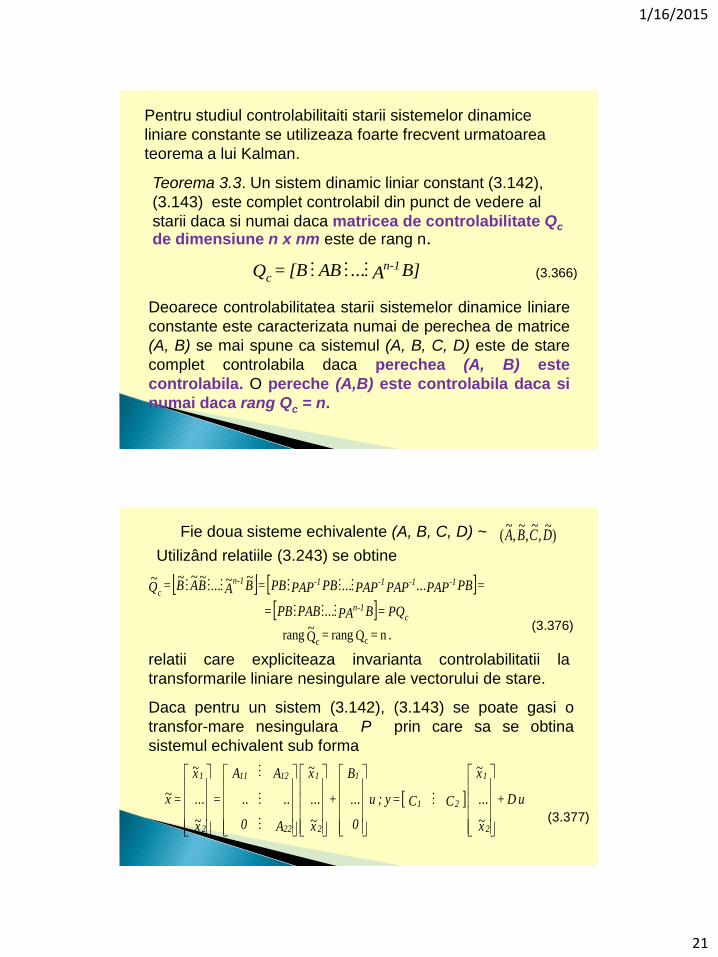
Pentru studiul controlabilitaiti starii sistemelor dinamice
liniare constante se utilizeaza foarte frecvent urmatoarea
teorema a lui Kalman.
Teorema 3.3. Un sistem dinamic liniar constant (3.142),
(3.143) este complet controlabil din punct de vedere al
starii daca si numai daca matricea de controlabilitate Qc
de dimensiune n x nm este de rang n.
B]A ... AB [B = Q -1nc
(3.366)
Deoarece controlabilitatea starii sistemelor dinamice liniare
constante este caracterizata numai de perechea de matrice
(A, B) se mai spune ca sistemul (A, B, C, D) este de stare
complet controlabila daca perechea (A, B) este
controlabila. O pereche (A,B) este controlabila daca si
numai daca rang Qc = n.
Fie doua sisteme echivalente (A, B, C, D) ~ )~
,~
,~
,~
( DCBA
Utilizând relatiile (3.243) se obtine
.n = Q rang = Q
~ rang
~~~~~~
cc
PQ = BPA...PABPB =
= PBPAP...PAPPAP...PBPAPPB = BA...BAB = Q
c-1n
-1-1-1-1-1n
c
(3.376)
relatii care expliciteaza invarianta controlabilitatii la
transformarile liniare nesingulare ale vectorului de stare.
Daca pentru un sistem (3.142), (3.143) se poate gasi o
transformare nesingulara P prin care sa se obtina
sistemul echivalent sub forma
u D +
x
...
x
CC =y ;u
0
...
B
+
x
...
x
A0
....
AA
=
x
...
x
= x
2
1
21
1
2
1
22
1211
2
1
~
~
~
~
~
~
~
(3.377)

1/16/2015
22
CC = C ,
0
...
B
= B ,
A0
.....
AA
= A 21
1}
22
1211} n1n1
~~~
(3.374)
dim x1 = n1 , atunci sistemul este partial controlabil.
În acest caz matricea de controlabilitate este
0
...................................
BA ... BA B
= Q
1-1n
111111
n}
c
1
~ (3.379)
Tinând seama si de (3.376), din (3.379) rezulta
B A...B AB rang =
= B~
A~...B
~ A
~B~
rang = Q~
rang = Q rang
11n-
111111
1n-cc = n1 (3.380)
adica în (3.377) numai perechea (A11, B1) este controlabila.
Rezulta ca în acest caz sistemul (3.142), (3.143) nu este
complet controlabil din punct de vedere al starii.
1~x
2~x
Din structura ecuatiilor (3.377) se constata usor ca vectorul x2
nu depinde de vectorul u nici direct, nici prin intermediul
componentelor vectorului , deci componentele vectorului,
nu sunt controlabile.
x~
1~x
Daca se calculeaza matricea de transfer a sistemelor
echivalente (3.142), (3.143) si (3.377) se obtine
. D + B )A - (sI C = D + B )A - (sI C = H(s) 1-1
111-1
(3.381)
Teorema 3.4. Orice sistem este echivalent (în spatiul starilor)
cu un altul având structura (3.377), în care sistemul (A11 , B1,
C1, D) este controlabil si echivalent intrare/iesire cu sistemul
initial.
1/16/2015
23
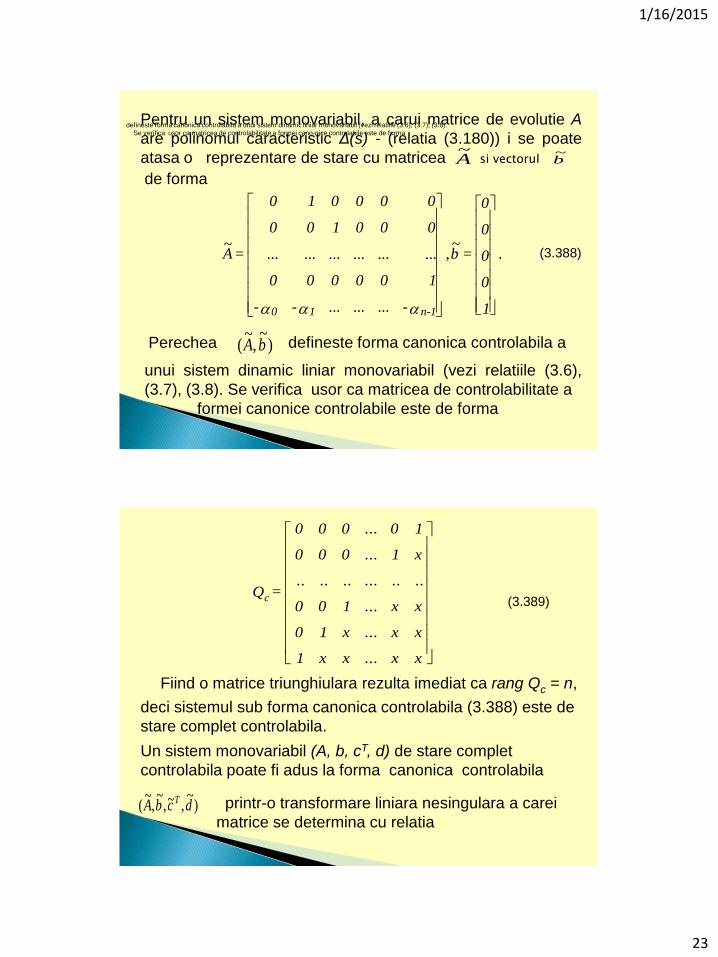
b~
Pentru un sistem monovariabil, a carui matrice de evolutie A
are polinomul caracteristic Δ(s) - (relatia (3.180)) i se poate
atasa o reprezentare de stare cu matricea A~
si vectorul b~
de forma
.
1
0
0
0
0
= b ,
-.........--
100000
..................
000100
000010
= A
1-n10
~~
(3.388)
Perechea
defineste forma canonica controlabila a unui sistem dinamic liniar monovariabil (vezi relatiile (3.6), (3.7), (3.8).
Se verifica usor ca matricea de controlabilitate a formei canonice controlabile este de forma
)~
,~
( bA
unui sistem dinamic liniar monovariabil (vezi relatiile (3.6),
(3.7), (3.8). Se verifica usor ca matricea de controlabilitate a
formei canonice controlabile este de forma
defineste forma canonica controlabila a
xx...xx1
xx...x10
xx...100
.............
x1...000
10...000
= Qc (3.389)
Fiind o matrice triunghiulara rezulta imediat ca rang Qc = n,
deci sistemul sub forma canonica controlabila (3.388) este de
stare complet controlabila.
)~
,~,~
,~
( dcbA T printr-o transformare liniara nesingulara a carei
matrice se determina cu relatia
Un sistem monovariabil (A, b, cT, d) de stare complet
controlabila poate fi adus la forma canonica controlabila
1/16/2015
24
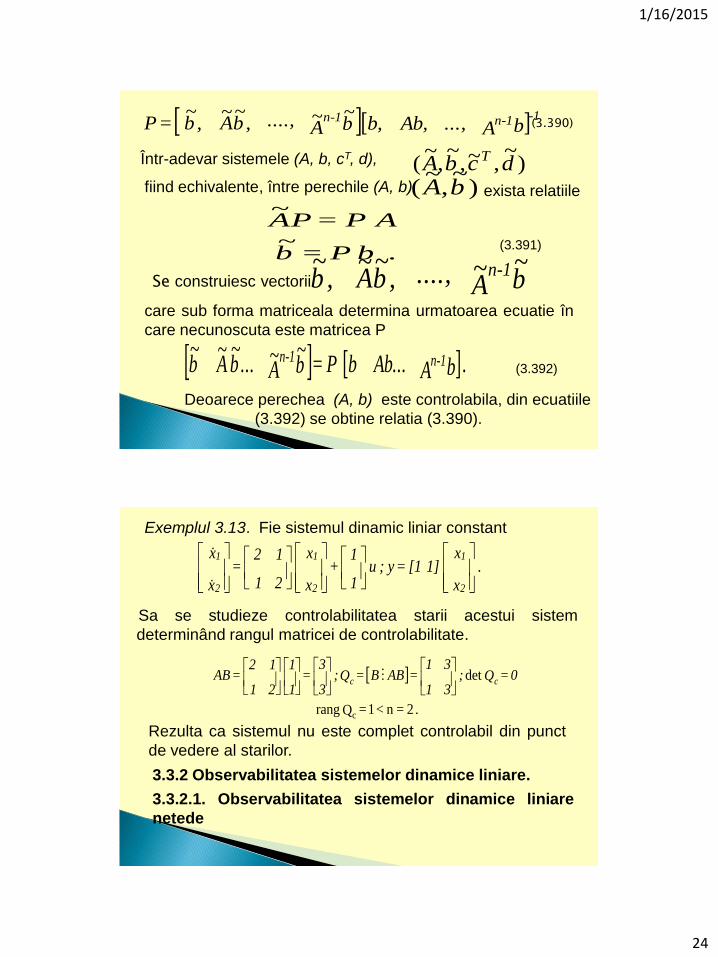
bA...,Ab,b, bA....,,bA,b = P -1n -1-1n ~~~~~(3.390)
Într-adevar sistemele (A, b, cT, d), )~
,~,~
,~
( dcbA T
fiind echivalente, între perechile (A, b) )~
,~
( bA exista relatiile
. b P = b
A P = PA~
~
(3.391)
Se construiesc vectorii bA....,,bA,b -1n ~~~~~
care sub forma matriceala determina urmatoarea ecuatie în
care necunoscuta este matricea P
. bAAb...b P = bA...b Ab -1n-1n ~~~~~(3.392)
Deoarece perechea (A, b) este controlabila, din ecuatiile
(3.392) se obtine relatia (3.390).
Exemplul 3.13. Fie sistemul dinamic liniar constant
. x
x 1] [1 =y ;u
1
1 +
x
x
21
12 =
x
x
2
1
2
1
2
1
Sa se studieze controlabilitatea starii acestui sistem
determinând rangul matricei de controlabilitate.
. 2 =n < 1 = Q rang
det
c
0 = Q ; 31
31 = AB B = Q ;
3
3 =
1
1
21
12 = AB
cc
Rezulta ca sistemul nu este complet controlabil din punct
de vedere al starilor.
3.3.2 Observabilitatea sistemelor dinamice liniare.
3.3.2.1. Observabilitatea sistemelor dinamice liniare
netede
1/16/2015
25
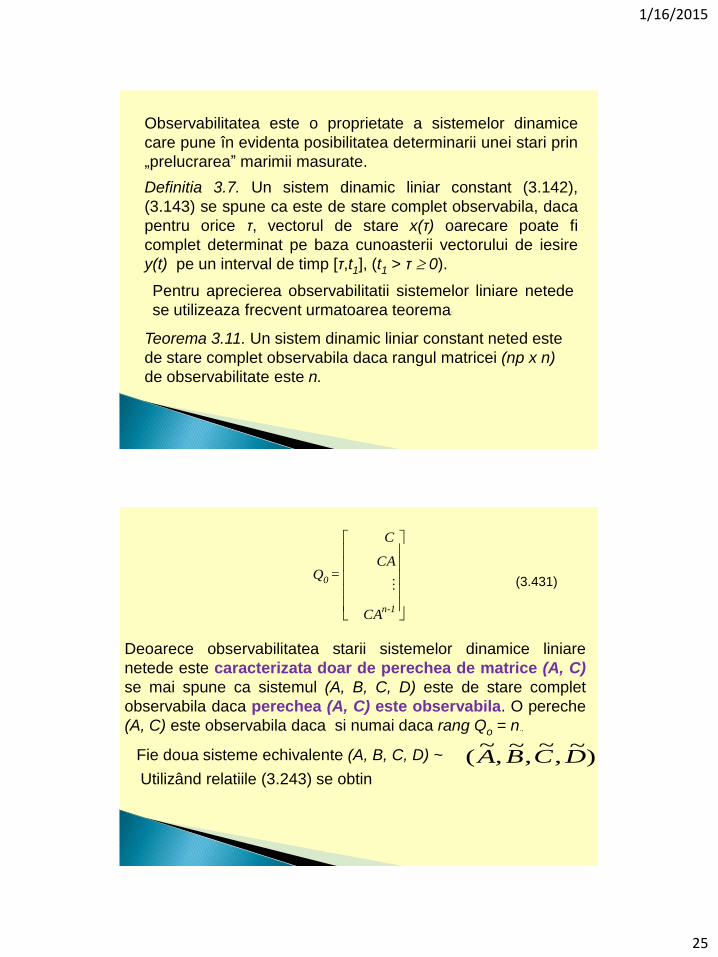
Observabilitatea este o proprietate a sistemelor dinamice
care pune în evidenta posibilitatea determinarii unei stari prin
„prelucrarea” marimii masurate.
Definitia 3.7. Un sistem dinamic liniar constant (3.142),
(3.143) se spune ca este de stare complet observabila, daca
pentru orice τ, vectorul de stare x(τ) oarecare poate fi
complet determinat pe baza cunoasterii vectorului de iesire
y(t) pe un interval de timp [τ,t1], (t1 > τ 0).
Pentru aprecierea observabilitatii sistemelor liniare netede
se utilizeaza frecvent urmatoarea teorema:
Teorema 3.11. Un sistem dinamic liniar constant neted este
de stare complet observabila daca rangul matricei (np x n)
de observabilitate este n.
CA
CA
C
= Q
1-n
0 (3.431)
Deoarece observabilitatea starii sistemelor dinamice liniare
netede este caracterizata doar de perechea de matrice (A, C)
se mai spune ca sistemul (A, B, C, D) este de stare complet
observabila daca perechea (A, C) este observabila. O pereche
(A, C) este observabila daca si numai daca rang Qo = n.,
Fie doua sisteme echivalente (A, B, C, D) ~ )~
,~
,~
,~
( DCBAUtilizând relatiile (3.243) se obtin
1/16/2015
26
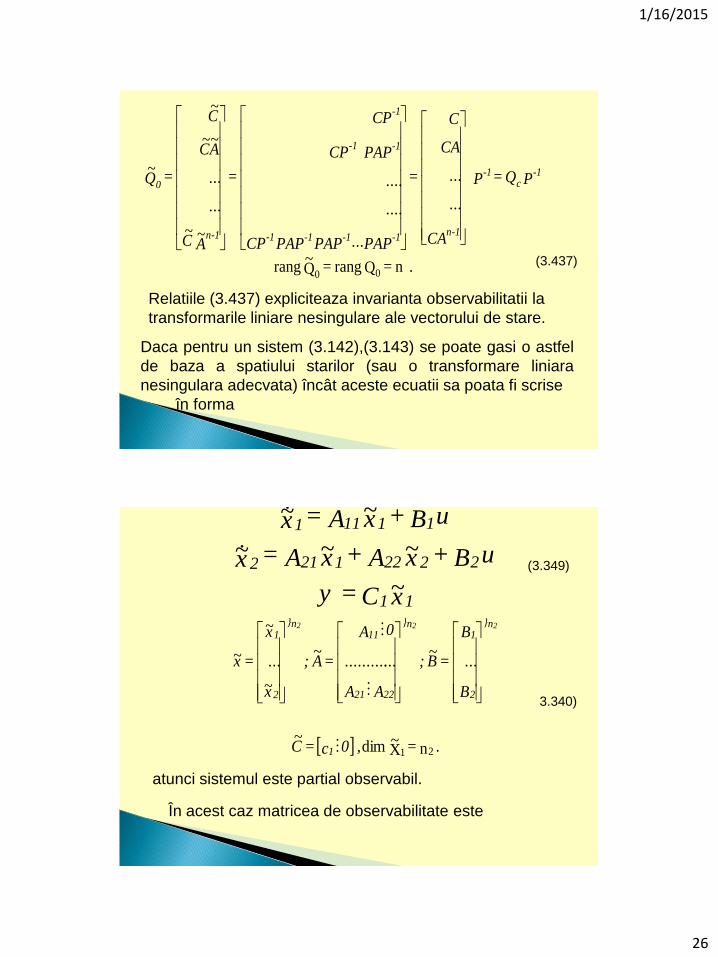
.n = Q rang = Q~
rang
~~
~~
~
~
00
PQ = P
CA
...
...
CA
C
=
PAP...PAPPAPCP
....
....
PAP CP
CP
=
AC
...
...
AC
C
=Q-1
c-1
-1n-1-1-1-1
-1-1
-1
-1n
0
(3.437)
Relatiile (3.437) expliciteaza invarianta observabilitatii la
transformarile liniare nesingulare ale vectorului de stare.
Daca pentru un sistem (3.142),(3.143) se poate gasi o astfel
de baza a spatiului starilor (sau o transformare liniara
nesingulara adecvata) încât aceste ecuatii sa poata fi scrise
în forma
xC =y
uB + xA + xA = x
uB + xA = x
11
22221212
11111
~
~~~
~~
(3.349)
. n = X~ dim
~
~~
~
~
~
21 ,0 c = C
B
...
B
= B ;
A A
.............
0 A
= A ;
x
...
x
= x
1
2
1n}
2221
11n}
2
1n} 222
3.340)
atunci sistemul este partial observabil.
În acest caz matricea de observabilitate este
1/16/2015
27
1111
2111
111
1
0~
n
0
AC
AC
AC
C
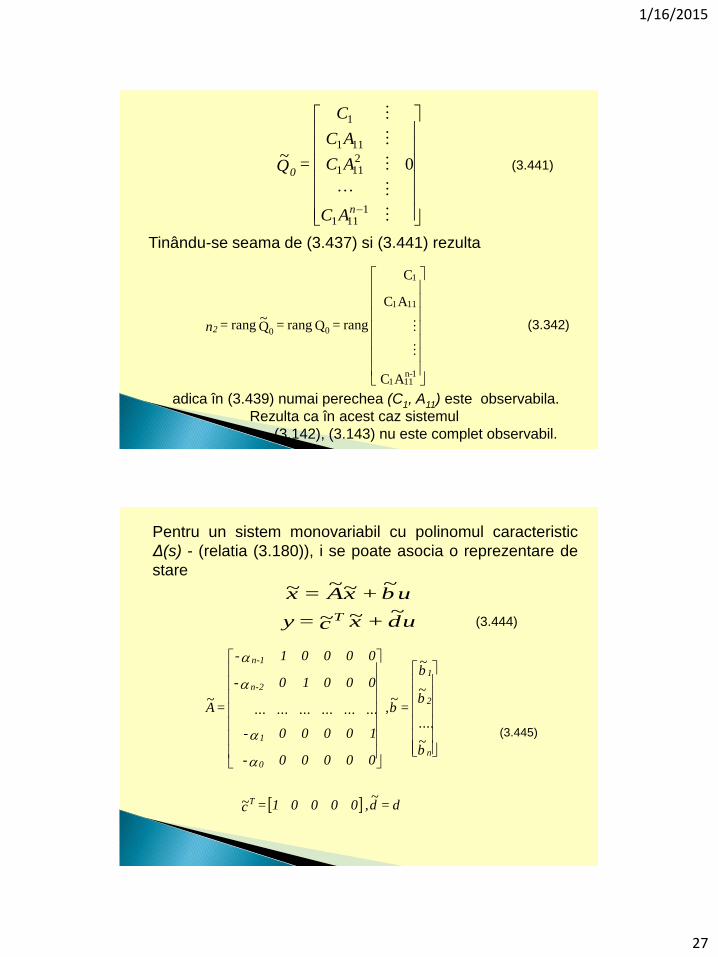
=Q (3.441)
Tinându-se seama de (3.437) si (3.441) rezulta
AC
AC
C
rang = Q rang = Q~
rang
1n-111
111
1
00
= n2 (3.342)
adica în (3.439) numai perechea (C1, A11) este observabila.
Rezulta ca în acest caz sistemul
(3.142), (3.143) nu este complet observabil.
Pentru un sistem monovariabil cu polinomul caracteristic
Δ(s) - (relatia (3.180)), i se poate asocia o reprezentare de
stare
ud + xc =y
ub + xA = x
T ~~~
~~~~
d = d ,00001 = c
b
....
b
b
= b ,
00000-
10000-
..................
00010-
00001-
= A
T
n
2
1
0
1
2-n
-1n
~~
~
~
~
~~
(3.444)
(3.445)

1/16/2015
28
care constituie forma canonica observabila a unui sistem
monovariabil. Matricea de observabilitate pentru sistemul
(3.444), (3.445) este
.
1xxxxx
01xxxx
..................
0...01..xx
0...00..1x
0...00..01
= Q~
0
(3.446)
Fiind o matrice triunghiulara, rezulta = n Q ~
rang0
Deci sistemul monovariabil în forma canonica
observabila este complet observabil.
Un sistem monovariabil (A, b, cT, d) de stare complet
observabila poate fi adus la forma canonica observabila
)~
,~,~
,~
( dcbA Tprintr-o transformare liniara nesingulara
a carei matrice se determina unic cu relatia
.
Ac
...
...
Ac
c
Ac
...
...
Ac
c
= Q Q = P
-1nT
T
T
-1nT
T
T -1
0
-1
0
~~
~~
~
~(3.447)
Relatia (3.447) se poate demonstra utilizând ecuatia (3.437).
Exemplul 3.15. Fie sistemul dinamic liniar constant

1/16/2015
29
. x
x1] [1 =y ;u
1
1 +
x
x
21
12 =
x
x
2
1
2
1
2
1
Sa se studieze observabilitatea starii acestui sistem determinând
rangul matricei de observabilitate
3] [3 = 21
121] [1 = Ac ;1] [1 = c
TT
0 = Q det ; 31
31 =
Ac
c = Q 0
T
T
0
2 = n < 1 = Q rang0
Rezulta ca sistemul nu este de stare complet observabila.















![GUVERNUL HOTARIRE 1643 RU - Moldovagaz€¦ · i h ^ j Z a ^ _ e _ g b c Z d p b h g _ j g h ] h h [ s _ k l \ Z 0ROGRYD JD] g _ a Z \ b k b f h h l l h ] h g Z d Z d b _ h ^ ] h](https://static.fdocumente.com/doc/165x107/605f208176a66f76ad16bf2d/guvernul-hotarire-1643-ru-moldovagaz-i-h-j-z-a-e-g-b-c-z-d-p-b-h-g-j.jpg)
