
Curs Tractoare UI 2014
156
3 Cuprins Introducere.................................................................................................................................. 7 Chestionar evaluare prerechizite .............................................................................................. 10 Unitatea de învăŃare 1. Aspecte generale privind transmisia tractoarelor ................................ 11 U1.1. Introducere .......................................................................................................... 11 U1.2. CompetenŃe ......................................................................................................... 11 U1.3. Rolul şi clasificarea transmisiilor tractoarelor .................................................... 12 U1.4. Scheme cinematice ale transmisiilor mecanice în trepte .................................... 12 U1.4.1. Transmisii mecanice ale tractoarelor 4×2 .............................................. 12 U1.4.2. Transmisii mecanice ale tractoarelor 4×4 .............................................. 15 U1.4.3. Transmisii mecanice ale tractoarelor pe şenile ...................................... 19 U1.5. Transmisii hidraulice........................................................................................... 20 U1.6. Rezumat .............................................................................................................. 30 U1.7. Test de evaluare a cunoştinŃelor .......................................................................... 31 Unitatea de învăŃare 2. Regimul de calcul al transmisiei tractoarelor la solicitări statice ....... 32 U2.1. Introducere .......................................................................................................... 32 U2.2. CompetenŃe ......................................................................................................... 32 U2.3. Regimul de calcul la solicitări statice în cazul tractoarelor pe roŃi ..................... 33 U2.4. Regimul de calcul la solicitări statice în cazul tractoarelor pe şenile ................. 37 U2.5. Rezumat .............................................................................................................. 38 U2.6. Test de autoevaluare a cunoştinŃelor ................................................................. ..38 Unitatea de învăŃare 3. Determinarea regimului de calcul al transmisiei la solicitări dinamice şi la oboseală .......................................................................................................................... ..40 U3.1. Introducere .......................................................................................................... 40 U3.2. CompetenŃe ......................................................................................................... 40 U3.3. Determinarea regimului de calcul la solicitări dinamice .................................... 41 U3.4. Determinarea aproximativă a momentului de calcul la oboseală ....................... 41 U3.5. Rezumat .............................................................................................................. 43 U3.6. Test de autoevaluare a cunoştinŃelor ................................................................... 44
description
Tractoare
Transcript of Curs Tractoare UI 2014

3
Cuprins
Introducere.................................................................................................................................. 7
Chestionar evaluare prerechizite .............................................................................................. 10
Unitatea de învăŃare 1. Aspecte generale privind transmisia tractoarelor ................................ 11
U1.1. Introducere .......................................................................................................... 11
U1.2. CompetenŃe ......................................................................................................... 11
U1.3. Rolul şi clasificarea transmisiilor tractoarelor .................................................... 12
U1.4. Scheme cinematice ale transmisiilor mecanice în trepte .................................... 12
U1.4.1. Transmisii mecanice ale tractoarelor 4×2 .............................................. 12
U1.4.2. Transmisii mecanice ale tractoarelor 4×4 .............................................. 15
U1.4.3. Transmisii mecanice ale tractoarelor pe şenile ...................................... 19
U1.5. Transmisii hidraulice........................................................................................... 20
U1.6. Rezumat .............................................................................................................. 30
U1.7. Test de evaluare a cunoştinŃelor.......................................................................... 31
Unitatea de învăŃare 2. Regimul de calcul al transmisiei tractoarelor la solicitări statice ....... 32
U2.1. Introducere .......................................................................................................... 32
U2.2. CompetenŃe ......................................................................................................... 32
U2.3. Regimul de calcul la solicitări statice în cazul tractoarelor pe roŃi ..................... 33
U2.4. Regimul de calcul la solicitări statice în cazul tractoarelor pe şenile ................. 37
U2.5. Rezumat .............................................................................................................. 38
U2.6. Test de autoevaluare a cunoştinŃelor................................................................. ..38
Unitatea de învăŃare 3. Determinarea regimului de calcul al transmisiei la solicitări dinamice
şi la oboseală .......................................................................................................................... ..40
U3.1. Introducere .......................................................................................................... 40
U3.2. CompetenŃe ......................................................................................................... 40
U3.3. Determinarea regimului de calcul la solicitări dinamice .................................... 41
U3.4. Determinarea aproximativă a momentului de calcul la oboseală ....................... 41
U3.5. Rezumat .............................................................................................................. 43
U3.6. Test de autoevaluare a cunoştinŃelor................................................................... 44

4
Unitatea de învăŃare 4. Amplificatoare de cuplu.................................................................... ..45
U4.1. Introducere .......................................................................................................... 45
U4.2. CompetenŃe ......................................................................................................... 45
U4.3. Amplificatoare de cuplu...................................................................................... 46
U4.3.1. Amplificatoare de cuplu planetare......................................................... 46
U4.3.2. Amplificatoare de cuplu neplanetare..................................................... 49
U4.4. Rezumat .............................................................................................................. 51
U4.5. Test de autoevaluare a cunoştinŃelor................................................................. ..51
Unitatea de învăŃare 5. ParticularităŃi funcŃionale şi constructive ale cutiilor de viteze pentru
tractoare................................................................................................................................... .53
U5.1. Introducere .......................................................................................................... 53
U5.2. CompetenŃe ......................................................................................................... 53
U5.3. Cutii de viteze compuse ...................................................................................... 54
U5.4. Cutii de viteze cu schimbarea treptelor sub sarcină ............................................ 57
U5.5. Rezumat .............................................................................................................. 61
U5.6. Test de evaluare a cunoştinŃelor........................................................................ ..61
Unitatea de învăŃare 6. ParticularităŃi funcŃionale, constructive şi de calcul ale diferenŃialelor
tractoarelor .............................................................................................................................. 62
U6.1. Introducere .......................................................................................................... 62
U6.2. CompetenŃe ......................................................................................................... 62
U6.3. Rolul şi clasificarea diferenŃialelor ..................................................................... 63
U6.4. DiferenŃialul simplu simetric .............................................................................. 64
U6.5. Regimul de calcul al diferenŃialului .................................................................... 68
U6.6. DiferenŃiale autoblocabile cu discuri de fricŃiune ............................................... 69
U6.6.1. Clasificarea diferenŃialelor autoblocabile cu discuri de fricŃiune.......... 69
U6.6.2. Determinarea momentelor de torsiune la cei doi arbori planetari, în
cazul diferenŃialelor cu frecare mărită. Coeficientul de blocare ........... 70
U6.6.3. DiferenŃial autoblocabil cu frecare mărită al cărui moment de
frecare depinde de momentul transmis................................................. 72
U6.6.4. DiferenŃial autoblocabil cu frecare mărită al cărui moment de
frecare nu depinde de momentul transmis............................................ 74
U6.6.5. DiferenŃiale autoblocabile cu strângere mixtă a cuplajelor ................... 75

5
U6.7. Rezumat.............................................................................................................. 78
U6.8. Test de autoevaluare a cunoştinŃelor ................................................................ ..79
Unitatea de învăŃare 7. ParticularităŃi funcŃionale şi constructive ale transmisiilor finale ale
tractoarelor. ............................................................................................................................ ..80
U7.1. Introducere .......................................................................................................... 80
U7.2. CompetenŃe ......................................................................................................... 80
U7.3. Rolul şi clasificarea transmisiilor finale.............................................................. 80
U7.4. Transmisia finală a tractoarelor pe roŃi ............................................................... 81
U7.5. Regimul de calcul al transmisiei finale, utilizată la tractoarele pe roŃi ............... 85
U7.6. Rezumat .............................................................................................................. 86
U7.7. Test de autoevaluare a cunoştinŃelor ................................................................. ..87
Unitatea de învăŃare 8. Prize de putere pentru tractoare. ....................................................... ..89
U8.1. Introducere .......................................................................................................... 89
U8.2. CompetenŃe ......................................................................................................... 89
U8.3. Rolul şi clasificarea prizelor de putere................................................................ 90
U8.4. Parametrii constructivi şi funcŃionali ai prizelor de putere ................................. 95
U8.5. Regimul de calcul al transmisiei prizei de putere ............................................... 98
U8.6. Rezumat ............................................................................................................ 100
U8.7. Test de autoevaluare a cunoştinŃelor ................................................................. 100
Unitatea de învăŃare 9. Mecanisme de suspendare pentru tractoare ...................................... 102
U9.1. Introducere ........................................................................................................ 102
U9.2. CompetenŃe ....................................................................................................... 102
U9.3. Rolul şi clasificarea mecanismelor de suspendare ............................................ 103
U9.4. Parametrii constructivi şi funcŃionali ai mecanismelor de suspendare în
3 puncte....................................................................................................................... 103
U9.5. AcŃionarea mecanismelor de suspendare .......................................................... 109
U9.6. Rezumat ............................................................................................................ 113
U9.7. Test de evaluare a cunoştinŃelor........................................................................ 113
Unitatea de învăŃare 10. Caracteristica teoretică de tracŃiune a tractoarelor. ....................... ..115
U10.1. Introducere...................................................................................................... 115

6
U10.2. CompetenŃe..................................................................................................... 115
U10.3. Definirea caracteristicii de tracŃiune............................................................... 116
U10.4. Modelarea matematică a caracteristicii externe a motorului de tractor.......... 117
U10.5. Determinarea forŃei motoare şi a forŃei de tracŃiune....................................... 121
U10.6. Modelarea matematică a interacŃiunii sistemului de rulare cu solul .............. 121
U10.7. Determinarea vitezei reale de deplasare a tractorului..................................... 125
U10.8. Determinarea puterii de tracŃiune ................................................................... 126
U10.9. Determinarea consumului specific de combustibil, raportat la
puterea de tracŃiune.......................................................................................... 126
U10.10. Determinarea pe cale analitică a randamentului de tracŃiune a tractorului . 126
U10.11. Alegerea şi determinarea vitezelor tractorului ............................................. 127
U10.12 Determinarea greutăŃii tractorului ................................................................. 133
U10.13 Metoda grafoanalitică de trasare a caracteristicii teoretice de tracŃiune ....... 135
U10.14. Rezumat........................................................................................................ 141
U10.15. Test de autoevaluare a cunoştinŃelor .......................................................... ..142
Unitatea de învăŃare 11. AplicaŃie privind calculul de tracŃiune şi trasarea caracteristicii
teoretice de tracŃiune pe cale grafoanalitică ......................................................................... ..143 U11.1. Introducere...................................................................................................... 143
U11.2. CompetenŃe..................................................................................................... 143
U11.3. Calculul de tracŃiune şi caracteristica teoretică de tracŃiune, obŃinută pe cale
grafoanalitică. AplicaŃie pentru un tractor pe roŃi 4×4 ............................................... 144
U11.3.1. Determinarea vitezelor tractorului................................................... 144
U11.3.2. Determinarea forŃei de tracŃiune la treapta principală de lucru ....... 146
U11.3.3. Determinarea greutăŃii tractorului ................................................... 147
U11.3.4. Determinarea forŃei de tracŃiune (motoare) la celelalte trepte......... 147
U11.3.5. Trasarea caracteristicii de tracŃiune după metoda grafoanalitică .... 148
U11.4. Rezumat.......................................................................................................... 155
Bibliografie............................................................................................................................. 156

7
Introducere
În concepŃia actuală, tractorul este considerat un autovehicul special, care se
deosebeşte esenŃial de automobil, având în vedere rolul funcŃional diferit al tractorului.
Tractorul este destinat să execute diferite operaŃii tehnologice cu ajutorul maşinilor sau
utilajelor (agricole, de construcŃii etc.) purtate, semipurtate sau remorcate. El constituie
principala sursă energetică în agricultură (bază energetică mobilă), ceea ce face ca parcul de
tractoare să joace un rol imens în dezvoltarea agriculturii şi, de asemenea, a altor ramuri ale
economiei. Pentru ca acest rol funcŃional să fie atins pe plan naŃional şi internaŃional s-au
proiectat şi realizat ansambluri speciale pentru tractoare. De asemenea, s-a elaborat o teorie a
tractorului şi metode de calcul principial deosebite de cele folosite în cazul automobilelor.
În lucrarea de faŃă sunt evidenŃiate particularităŃi ale construcŃiei şi calculului
transmisiei tractoarelor pe roŃi: ambreiaje duble (cu două fluxuri de putere), amplificatoare de
cuplu, cutii de viteze cu cuplarea sub sarcină (power shift), diferenŃiale cu cuplare facultativă
şi autoblocabile cu discuri de fricŃiune, transmisii finale, transmisia prizei de putere etc.
Un accent deosebit s-a pus pe determinarea regimului de calcul al subansamblurilor
transmisiei, adică pe stabilirea corectă a datelor de intrare pentru proiectarea acestora.
Sunt prezentate metode de trasare a caracteristicii de tracŃiune a tractoarelor, însoŃite
de aplicaŃii teoretice, în scopul determinării performanŃelor de tracŃiune şi economice ale
tractoarelor.
Prezenta lucrare se adresează în primul rând studenŃilor şi absolvenŃilor de la
specializarea Autovehicule rutiere, studenŃilor de la Maşini şi instalaŃii pentru agricultură,
masteranzilor şi doctoranzilor din domeniul automobilelor şi tractoarelor. De asemenea, ea
poate prezenta interes pentru specialiştii în domeniul proiectării şi cercetării tractoarelor.
Obiectivele cursului
Cursul intitulat „Tractoare” are ca scop general îmbogăŃirea cunoştinŃelor
din sfera disciplinelor cu caracter tehnic de specialitate ale studenŃilor de la
programul de studii Autovehicule Rutiere. Principalele obiective ale acestui curs
sunt:
- dobândirea de cunoştinŃe generale privind transmisia tractoarelor (rolul,
clasificarea, scheme cinematice ale transmisiilor mecanice în trepte şi al celor
hidrodinamice);
- dobândirea de cunoştinŃe în ceea ce priveşte regimul de calcul al transmisiei
tractoarelor pe roŃi şi pe şenile la solicitări statice şi dinamice;
- dobândirea de cunoştinŃe în ceea ce priveşte rolul, funcŃionarea, construcŃia şi
elemente de calcul şi principii de proiectare a amplificatoarelor de cuplu;

8
- dobândirea de cunoştinŃe în ceea ce priveşte particularităŃile funcŃionale şi
constructive ale cutiilor de viteze cu cuplarea sub sarcină;
- dobândirea de cunoştinŃe în ceea ce priveşte particularităŃile funcŃionale,
constructive şi de calcul ale diferenŃialelor tractoarelor;
- dobândirea de cunoştinŃe în ceea ce priveşte particularităŃile funcŃionale şi
constructive ale transmisiilor finale ale tractoarelor;
- dobândirea de cunoştinŃe în ceea ce priveşte particularităŃile funcŃionale,
constructive şi de calcul ale prizelor de putere;
- dobândirea de cunoştinŃe în ceea ce priveşte particularităŃile transmisiilor
tractoarelor 4×4;
- pregătirea studenŃilor în vederea realizării calculului de tracŃiune a tractorului;
- pregătirea studenŃilor în vederea realizării proiectării transmisiei unui tractor.
CompetenŃe conferite
După parcurgerea materialului cursanŃii vor fi capabili:
- să identifice elementele componente ale transmisiilor tractoarelor, precum şi rolul
acestora;
- să realizeze schemele cinematice ale transmisiilor tractoarelor;
- să se familiarizeze cu principiile de funcŃionare ale subansamblurilor
transmisiilor tractoarelor;
- să realizeze mersul de calcul pentru elementele principale ale subansamblurilor
transmisiilor tractoarelor;
- să parcurgă etapele necesare în vederea realizării calculului de tracŃiune a
tractorului;
- să utilizeze cunoştinŃele acumulate pentru abordarea altor discipline de
specialitate.
- să îşi desăvârşească pregătirea ca viitori specialişti în inginerie, în general şi în
ingineria autovehiculelor în mod special.
Resurse şi mijloace de lucru
Parcurgerea unităŃilor de învăŃare aferente cursului necesită cunoştinŃele
acumulate în cadrul disciplinelor „Organe de maşini”, „Dinamica autovehiculelor”
şi „Calculul şi construcŃia autovehiculelor”, precum şi cunoştinŃe de desen tehnic,
studiul materialelor, mecanică şi mecanisme.
Alături de utilizarea suportului de curs este necesar şi accesul internet pe
platforma e-learning a UniversităŃii.

9
Structura cursului
Cursul „Tractoare” este structurat pe zece unităŃi de învăŃare care cuprind:
cuprins, introducere, competenŃe, aspecte teoretice privind tematica unităŃii,
exemple, probleme rezolvate, probleme propuse spre discuŃie şi rezolvare,
elemente de rememorare, rezumat, precum şi teste de evaluare şi autoevaluare.
Este necesară reluarea problemelor rezolvate (Exemple) şi rezolvarea celor
propuse spre rezolvare (To do), precum şi a testelor de evaluare sau autoevaluare.
CerinŃe preliminare
Pentru parcurgerea materialului propus sunt necesare noŃiuni de bază în
inginerie. Este esenŃială cunoaşterea disciplinelor de bază în formarea
inginerească: ŞtiinŃa şi tehnologia materialelor I+II, Desen tehnic şi infografică I şi
II, Mecanica I+II, RezistenŃa materialelor I+II, Mecanisme, Organe de maşini I şi
II, Dinamica autovehiculelor I şi II, Calculul şi construcŃia autovehiculelor I.
Discipline deservite
Discipline din planul de învăŃământ care se dezvoltă pe baza cunoştinŃelor
dobândite în cadrul disciplinei curente se regăsesc în planul de învăŃământ al
programelor de studii de licenŃă Autovehiculul şi mediul şi Autovehiculul şi
tehnologiile viitorului: Autovehicule speciale, Autovehicule comunale şi tractoare,
Autovehicule speciale şi tractoare.
Durata medie de studiu individual
Parcurgerea de către studenŃi a fiecărei unităŃi de învăŃare a cursului
„Tractoare” se poate face într-un interval de timp de aproximativ 2 … 4 ore.
Evaluarea
La sfârşitul orelor de laborator, studenŃii vor susŃine un colocviu de
laborator din cunoştinŃele acumulate în timpul semestrului. Fiecare student va
primi în cadrul colocviului o notă NCL.
La sfârşitul semestrului studenŃii, vor susŃine un examen la o dată
programată de către coordonatorul programului de studiu. Fiecare student va primi
în cadrul examenului o notă pentru rezolvarea unui test de cunoştinŃe NT.
Nota primită în cadrul colocviului (NCL) are o pondere de 40% din nota
finală, iar nota la test (NT) de 60%.
Pentru promovare, ambele note (NCL şi NT) trebuie să fie de trecere (minim
5). Nota finală (NFE – nota finală la examen), cea care va fi trecută în catalog, se va
calcula după formula: NFE = 0,6·NT +0,4·NCL.

10
Chestionar evaluare prerechizite
1. Ce înŃelegeŃi prin schema cinematică a transmisiei unui autovehicul?
2. Care este rolul transmisiei unui autovehicul?
3. FaceŃi o clasificare a tipurilor de transmisii pentru autovehicule.
4. EnumeraŃi subansamblurile componente ale unei transmisii mecanice.
5. Care este rolul ambreiajului principal?
6. Care este rolul cutiei de viteze?
7. Care este rolul diferenŃialului?
8. Ce se înŃelege prin blocarea diferenŃialului şi când este ea necesară?
9. EnumeraŃi avantajele transmisiei 4×4.
10. EnumeraŃi dezavantajele transmisiei 4×4.
11. DefiniŃi bilanŃul de puteri.
12. DefiniŃi bilanŃul de tracŃiune.

11
Unitatea de învăŃare 1. Aspecte generale privind transmisia tractoarelor
Cuprins U1.1. Introducere .......................................................................................................... 11
U1.2. CompetenŃe ......................................................................................................... 11
U1.3. Rolul şi clasificarea transmisiilor tractoarelor .................................................... 12
U1.4. Scheme cinematice ale transmisiilor mecanice în trepte .................................... 12
U1.4.1. Transmisii mecanice ale tractoarelor 4×2 .............................................. 12
U1.4.2. Transmisii mecanice ale tractoarelor 4×4 .............................................. 15
U1.4.3. Transmisii mecanice ale tractoarelor pe şenile ...................................... 19
U1.5. Transmisii hidraulice........................................................................................... 20
U1.6. Rezumat .............................................................................................................. 30
U1.7. Test de evaluare a cunoştinŃelor.......................................................................... 31
U1.1. Introducere
În cadrul acestei unităŃi de învăŃare se prezentă rolul şi clasificarea
transmisiilor tractoarelor.
Se pune accent pe prezentarea transmisiilor mecanice (4×4, 4×2 şi pe
şenile), precum şi pe transmisiile hidrostatice, hidrodinamice şi hidromecanice,
făcându-se o exemplificare bogată şi diversificată pe cele mai reprezentative
tractoare româneşti şi pe tractoare ale unor firme de prestigiu. Exemplele sunt
însoŃite de detalieri constructive şi funcŃionale.
U1.2. CompetenŃele unităŃii de învăŃare
După parcurgerea materialului acestei unităŃi de învăŃare studenŃii vor fi
capabili:
• să cunoască rolul transmisiei unui tractor;
• să recunoască tipul transmisiei unui tractor;
• să identifice elementele transmisiei unui tractor;
• să cunoască principiul de funcŃionare al transmisiei;
• să realizeze o schemă cinematică a unei transmisii cu parametri impuşi.
Durata medie de parcurgere a primei unităŃi de învăŃare este de 3 ore.

12
U1.3. ROLUL ŞI CLASIFICAREA TRANSMISIILOR TRACTOARELOR
Prin transmisia tractorului se înŃelege totalitatea subansamblurilor (mecanismelor)
care transmit puterea motorului roŃilor motoare. Transmisia modifică viteza unghiulară a
roŃilor motoare şi momentul de torsiune corespunzător. Aşadar, prin intermediul transmisiei,
se modifică viteza de deplasare şi forŃa motoare (implicit şi forŃa de tracŃiune), permiŃând
tractorului să se adapteze diverselor condiŃii de exploatare.
Transmisia unui tractor trebuie să îndeplinească următoarele condiŃii:
- să fie realizată după scheme cinematice simple;
- să aibă randament ridicat;
- să asigure modificarea raportului de transmitere în diapazonul dat (d = itr max/itr min =
vmax/vmin);
- să permită schimbarea sensului de deplasare a tractorului (dacă diapazonul vitezelor
de mers înainte şi înapoi este acelaşi, atunci transmisia se numeşte reversibilă);
- să asigure virajul tractorului cu diferite raze;
- să permită, la nevoie, întreruperea fluxului de putere;
- să funcŃioneze eficient atât în regimul de tracŃiune, cât şi în regimul de frânare cu
motorul;
- împreună cu transmisia prizei de putere, să permită acŃionarea maşinilor din agregat
cu anumite turaŃii, în funcŃie de condiŃiile de lucru.
Transmisiile utilizate în prezent la tractoare pot fi clasificate după mai multe criterii.
După modul de transmitere a puterii de la motor la roŃile motoare ale tractorului, pot
fi: mecanice, hidraulice, electrice sau combinate (hidromecanice, electromecanice).
După felul variaŃiei vitezei de deplasare a tractorului, transmisiile pot fi: în trepte şi
fără trepte (progresive).
Transmisiile în trepte permit tractorului să se deplaseze, între viteza minimă şi cea
maximă, cu un număr limitat de trepte de viteze. Ele pot fi mecanice (cu angrenaje),
hidromecanice sau electromecanice.
Transmisiile fără trepte (progresive) dau posibilitatea ca, între anumite limite, să se
obŃină orice raport de transmitere, astfel încât tractorul se poate deplasa între viteza minimă şi
cea maximă cu un număr infinit de trepte de viteze. Ele pot fi mecanice (cu variatoare),
hidraulice (hidrostatice) sau electrice.
U1.4. SCHEME CINEMATICE ALE TRANSMISIILOR MECANICE ÎN TREPTE
Datorită simplităŃii şi siguranŃei în funcŃionare, transmisiile mecanice în trepte au
căpătat cea mai largă răspândire în construcŃia de tractoare. În plus, ele prezintă şi următoarele
avantaje: greutate specifică mică, randament mare, fiabilitate ridicată, întreŃinere şi reparare
uşoare.
Transmisiile mecanice în trepte sunt alcătuite, în general, din următoarele

13
subansambluri: ambreiajul principal, cutia de viteze, transmisia centrală, diferenŃialul (la
tractoarele pe roŃi) sau mecanismele de direcŃie (la tractoarele pe şenile) şi transmisia finală.
Pe lângă transmisia propriu-zisă, tractoarele mai sunt prevăzute cu transmisii speciale, pentru
acŃionarea diferitelor mecanisme şi organe de lucru.
Schema cinematică a transmisiei depinde de tipul tractorului (pe roŃi 4×2, 4×4 sau pe
şenile), numărul treptelor de viteze şi plasarea arborilor în cutia de viteze (longitudinal sau
transversal), plasarea transmisiei finale (lângă diferenŃial sau lângă roŃile motoare), tipul prizei
de putere şi de modul de acŃionare al altor organe de lucru.
Numărul treptelor transmisiilor mecanice atinge frecvent valorile 16…20, uneori 36 şi
chiar mai mult. Prin aceasta, transmisia mecanică în trepte se apropie de una progresivă.
U1.4.1 Transmisii mecanice ale tractoarelor 4×2
În continuare sunt prezentate schemele cinematice ale unor tractoare pe roŃi 4×2. În
figura 1.1 este reprezentată schematic transmisia tractorului U 445. Motorul transmite puterea
ambreiajului dublu 1, compus din ambreiajul principal a şi ambreiajul prizei de putere b. De
la ambreiajul a, mişcarea este transmisă la cutia de viteze 3, prin cuplajul elastic 2. Cutia de
viteze 3 realizează (3+1) trepte: trei trepte pentru mersul înainte şi una pentru mersul înapoi.
Reductorul planetar 4, cu două trepte, dublează numărul treptelor de viteze. Cutia de viteze 3,
împreună cu reductorul 4, formează o cutie de viteze compusă. De la transmisia centrală 5,
mişcarea se transmite la diferenŃialul 6 şi, de aici, prin intermediul transmisiei finale 8, la
roŃile motoare 9. Frânele cu bandă 7 sunt montate pe arborii planetari ai diferenŃialului.
Blocarea diferenŃialului se realizează cu manşonul 10.
Fig. 1.1. Schema cinematică a transmisiei tractorului U 445.

14
Tractorul U 445 este prevăzut cu două tipuri de prize de putere: normală (cu turaŃie
constantă standard pentru APP – arborele prizei de putere) şi sincronă (turaŃie proporŃională
cu viteza de deplasare a tractorului). Prin deplasarea spre stânga a roŃii 12, se cuplează priza
de putere normală (poziŃia N); ambreiajul b, prin intermediul arborelui 11 şi al angrenajului
13, antrenează arborele 14. Prin deplasarea roŃii 12 spre dreapta (poziŃia S), se cuplează priza
de putere sincronă. OpŃional, se poate monta reductorul conic 15 şi roata de curea 16, roată
destinată antrenării diverselor maşini agricole prin intermediul unei curele de transmisie.
Fig. 1.2. Schema cinematică a transmisiei tractorului U 650.
În figura 1.2 se prezintă schema cinematică a transmisiei tractorului U 650. De la
ambreiajul principal 1, mişcarea se transmite la amplificatorul de cuplu (format din ambreiajul
2, cuplajul unisens 3 şi mecanismul planetar 4) şi de aici la cutia de viteze 5, care realizează
(5+1) trepte. Amplificatorul de cuplu realizează două game de viteze (rapidă şi lentă), astfel
încât, cutia de viteze compusă (formată din cutia de viteze propriu-zisă 5 şi amplificatorul de
cuplu) va avea (10+2) trepte. Trecerea de la o gamă la alta se realizează în timpul mersului,
fără întreruperea fluxului de putere (sub sarcină). Trebuie menŃionat că, la ora actuală,
amplificatorul de cuplu a fost înlocuit cu un reductor planetar care realizează aceleaşi rapoarte
de transmitere (v. fig. 1.4). Se obŃine o construcŃie mai fiabilă, dar se elimină avantajele
amplificatorului de cuplu. Prin transmisia centrală 6, diferenŃialul 7 şi transmisia finală 8,
mişcarea se transmite roŃilor motoare 10. Frânele cu discuri 9 sunt plasate pe arborii planetari
ai diferenŃialului. Blocarea diferenŃialului se realizează cu ajutorul dispozitivului de blocare
11. Transmiterea puterii la priza de putere normală se realizează de la partea conducătoare a
ambreiajului 1 (priza fiind independentă) printr-un angrenaj cilindric, prin arborele 12 (care
trece prin interiorul arborelui intermediar tubular al cutiei de viteze) până la manşonul de
comandă 13, care, în acest caz, trebuie să fie în poziŃia N (normală). De la acesta, prin
arborele 14 şi reductorul planetar 15, mişcarea se transmite la arborele prizei de putere 16. În

15
cazul cuplării manşonului 13 în poziŃia S, mişcarea este primită de la arborele secundar al
cutiei de viteze prin roata a, care se roteşte liber pe arborele intermediar. Pentru cuplarea
prizei de putere, se strânge frâna f1 a reductorului planetar, iar pentru oprire, frâna f2
(acŃionarea frânelor este sincronizată). Transmiterea mişcării la roata de curea 18 (montată
opŃional) se face prin reductorul 17 de la arborele intermediar al cutiei de viteze.
U1.4.2 Transmisii mecanice ale tractoarelor 4×4
La tractoarele de putere mică şi mijlocie (de regulă sub 120 kW) s-a extins foarte mult
folosirea soluŃiei 4×4 cu roŃi neegale, puntea din faŃă fiind directoare.
Fig. 1.3. Schema cinematică a transmisiei tractorului U 445 DT.
Răspândirea mare a tractoarelor 4×4 se explică prin faptul că, în condiŃiile unei tipizări
largi a producŃiei, se obŃin foarte uşor ambele variante constructive (4×2 şi 4×4) ale aceluiaşi
tractor. Transmisiile acestor tractoare diferă de cele ale tractoarelor 4×2 prin aceea că mai
apare o transmisie pentru puntea din faŃă. Astfel, schema din figura 1.3 a tractorului U 445 DT
diferă de cea din figura 1.1 (U 445) prin adăugarea transmisiei punŃii din faŃă. De la arborele
secundar al cutiei de viteze, mişcarea se transmite la puntea din faŃă prin reductorul lateral 1
(prevăzut cu o roată baladoare pentru cuplarea facultativă a punŃii din faŃă), transmisia
cardanică 2, transmisia centrală 3, diferenŃialul 4 şi cuplajele unghiulare sincrone 5.
În figura 1.4 este reprezentată schema cinematică a transmisiei tractorului cu două
punŃi motoare U 651 M, derivată din U 650 M (în această schemă, amplificatorul de cuplu din
figura 1.2 – poz. 2, 3 şi 4 – a fost înlocuit cu un reductor cu două trepte). Ca şi în schema
precedentă, puntea din faŃă este acŃionată de arborele secundar al cutiei de viteze, incluzând,
însă, în lanŃul cinematic şi o transmisie finală (reductor pseudoplanetar – braŃul portsatelit
fiind fix, transmisia finală este de fapt un reductor cu axe fixe).

16
Fig. 1.4. Schema cinematică a transmisiei tractorului U 651 M (cu două punŃi motoare): 1 – reductor lateral cu roŃi baladoare pentru cuplarea facultativă a punŃii din faŃă; 2 – transmisie
cardanică; 3 – transmisie centrală; 4 – diferenŃial; 5 – cuplaj unghiular sincron; 6 – transmisie finală.
Fig. 1.5 Schema cinematică a transmisiei tractoarelor U 850 DT şi U 1010 DT: 1 – ambreiaj dublu cu decuplare în paralel (a – ambreiaj principal; b – ambreiajul prizei de putere); 2 - cutie de viteze
compusă; 3 – frână disc de parcare; 4 – angrenajul prizei de putere sincrone; 5 – transmisie centrală; 6 – diferenŃial cu blocare facultativă; 7 - frână disc de serviciu; 8 – transmisie finală planetară; 9 –
reductorul prizei de putere cu două turaŃii; 10 – reductor lateral pentru cuplarea facultativă a punŃii din faŃă; 11 – arbore pentru antrenarea punŃii faŃă; 12 – transmisie centrală; 13 – diferenŃialul punŃii faŃă;
14 – cuplaj unghiular sincron; 15 – transmisie finală.
Schema cinematică din figura 1.5 se utilizează la tractoarele U 850 DT şi U 1010 DT,
care, de asemenea, se deosebeşte de cea corespunzătoare tractoarelor U 850 şi U 1010 prin
adăugarea transmisiei punŃii din faŃă (cu antrenare centrală). Puntea din faŃă a acestor

17
tractoare are următoarele caracteristici: grup conic cu dantură Gleason; diferenŃial cu patru
sateliŃi; reductoare în butucii roŃilor; cuplaje unghiulare sincrone executate sub forma unor
articulaŃii cardanice duble; comanda cuplării şi decuplării punŃii se face facultativ printr-o
manetă separată.
În figura 1.6 este reprezentată schema cinematică a transmisiei tractoarelor John
Deere 6000 şi 7000 Power Quad, cu 24+24 trepte (opŃional 36+24), parŃial cu cuplare sub
sarcină. Transmisia are în componenŃă cutia de viteze planetară 1 cu cuplare sub sarcină (cu 4
trepte) şi cutia de viteze 2 (cu 6 trepte), cu ajutorul cărora se realizează cele 24 trepte de mers
înainte. Cu ajutorul unui inversor, comandat de frâna F, se realizează acelaşi număr de trepte
şi pentru mersul înapoi. OpŃional, poate fi montat reductorul pentru viteze superlente 3, care
împreună cu cutia de viteze 1 şi treptele I, II şi III din cutia de viteze 2, realizează un număr
suplimentar de 12 trepte de viteze de mers înainte. DiferenŃialul punŃii spate 4 poate fi blocat.
Transmisia finală 6 este planetară. Transmisia tractorului permite cuplarea sub sarcină a punŃii
faŃă. Reductorul prizei de putere 7 are trei trepte şi permite rotirea arborelui prizei cu turaŃiile
540, 1000 şi 540 rot/min “treaptă economică”.
Fig. 1.6. Schema cinematică a transmisiei tractoarelor John Deere 6000 şi 7000 Power Quad, cu 24+24 trepte (opŃional 36+24). 1 – cutie de viteze planetară cu cuplare sub sarcină (4 trepte); 2 – cutie de viteze (6 trepte); 3 – reductor pentru viteze superlente (opŃional); 4 – diferenŃial cu blocare; 5 – frâne de serviciu; 6 – transmisie finală planetară; 7 – reductorul prizei de putere (cu 3 trepte: 540, 1000 şi 540 rot/min “treaptă economică”; A – ambreiaj principal; F – frână pentru comanda inversorului.
Schema cinematică din figura 1.7 este a transmisiei tractoarelor Case–IH 3200 (cu
motor Diesel de 33, 38 sau 44 kW) şi 4200 (cu motor Diesel cu puteri nominale de 52…66
kW), cu 16+8 trepte (organizate după schema 2⋅4⋅(2+1) trepte). Amplificatorul de cuplu 1
realizează două game de viteze (cu rapoartele de transmitere ia2 = 1 şi ia1 = 1,2). Cutia de
viteze 3 are 4 trepte sincronizate. Reductorul 4 realizează 2 trepte de mers înainte şi una de
mers înapoi. DiferenŃialul punŃii spate este cu blocare facultativă. Cuplarea punŃii faŃă se poate
realiza sub sarcină, prin intermediul ambreiajului A. Trebuie menŃionat că frânarea tractorului

18
poate fi realizată pe toate roŃile, prin acŃionarea simultană a frânelor F1 şi F2. Transmisia
finală 6 este planetară. AcŃionarea transmisiei prizei de putere se realizează de la elementul
conducător al ambreiajului principal 1. Reductorul prizei de putere 7 permite antrenarea
arborelui prizei de putere APP cu două turaŃii (540 şi 1000 rot/ min).
Fig. 1.7. Schema cinematică a transmisiei tractoarelor Case – IH 3200 şi 4200 cu 16+8 trepte:
1 – ambreiaj principal; 2 – amplificator de cuplu (ia2 = 1 şi ia1 = 1,2); 3 – cutia de viteze cu 4 trepte; 4 – reductor cu (2+1) trepte; 5 – diferenŃial cu blocare facultativă; 6 – transmisia finală planetară; 7 – reductorul prizei de putere (cu 2 trepte); A – ambreiaj pentru cuplarea sub sarcină a punŃii faŃă; F1 şi F2 – frâne de serviciu pentru puntea faŃă, respectiv spate; APP – arborele prizei de putere.
Fig. 1.8. Schema cinematică a transmisiei Electro Shift a firmei Ford la tractoarele Seria 40: 1 – amplificator de cuplu; 2 – reductor pentru trepte superlente (opŃional); 3 – inversor (cu sincronizatoare); 4 - cutie de viteze (2 trepte); 5 – cutie de viteze cu cuplare sub sarcină (2 trepte); 6 – reductor (2 trepte sincronizate).
În figura 1.8 este reprezentată schema cinematică a transmisiei Electro Shift, parŃial cu
cuplarea sub sarcină a treptelor de viteză (patru trepte) şi cu inversor cu sincronizatoare,
utilizată de firma Ford la tractoarele Seria 40 (cu motoare Diesel cu puteri nominale de
55…88 kW). Amplificatorul de cuplu 1 realizează două game de viteze, una cu un raport de

19
transmitere egal cu unitatea (când este cuplat ambreiajul A2) şi a doua cu un raport supraunitar
(când este cuplat ambreiajul A1). Cutia de viteze 4 (cu două trepte sincronizate) este înseriată
cu cutia de viteze cu cuplare sub sarcină 5 (cu două trepte) şi reductorul 6 (cu două trepte
sincronizate, normală N şi lentă L). Datorită inversorului cu sincronizatoare 3, se obŃine
acelaşi număr de trepte atât la deplasarea înainte, cât şi înapoi, respectiv 16 trepte, toate
sincronizate. OpŃional, se poate monta reductorul 2 pentru trepte superlente.
U1.4.3 Transmisii mecanice ale tractoarelor pe şenile
Schemele cinematice ale transmisiilor tractoarelor pe şenile diferă în principiu de cele
ale tractoarelor pe roŃi prin aceea că, în locul diferenŃialului dintre roŃi, se folosesc mecanisme
de direcŃie pentru realizarea virajului.
Fig. 1.9. Schema cinematică a transmisiei tractorului S 650.
În schema din figura 1.9 a tractorului S 650, puterea se transmite de la ambreiajul
principal 1 (facultativ cuplat), prin cuplajul elastic 2, cutia de viteze cu (5+1) trepte 3,
transmisia centrală 4, ambreiajele de direcŃie 6, transmisia finală 7, la roŃile motoare 8. Pe
tamburele conduse ale ambreiajelor de direcŃie sunt montate frânele cu bandă 5 pentru
realizarea virajelor cu raze mici. Acest tractor are priză de putere normală independentă; cei
doi arbori ai prizei, 12 şi 13 (cu turaŃii de 1000 rot/min şi, respectiv, 540 rot/min), primesc
mişcarea de la partea conducătoare a ambreiajului principal 1 prin angrenajul 9, cuplajul 10 şi
ambreiajul de fricŃiune 11. OpŃional, se poate monta roata de curea 14. Din considerente
constructive, la tractoarele pe şenile, roata de curea se poate monta numai în spate. Pompa
hidraulică P1 se foloseşte pentru instalaŃia hidraulică de ridicat, iar P2 - pentru ungerea sub
presiune a cutiei de viteze.

20
Schema cinematică din figura 1.10 realizează (6+2) trepte de viteze cu ajutorul unei
cutii de viteze compuse (cutia de viteze 2 şi reductorul 3). Priza de putere este dependentă.
Fig. 1.10. Schema cinematică a transmisiei tractoarelor S 445, S 530, S 550, S 640: 1 – ambreiaj principal facultativ cuplat (tractoarele S 550 şi S 640 sunt prevăzute cu ambreiaj bidisc); 2 - cutie de viteze cu (3+1) trepte; 3 – reductor cu două trepte; 4 – transmisie centră; 5 – ambreiaj de direcŃie; 6 – frână cu bandă; 7 – transmisie finală; 8 – roată motoare; 9 – roată de curea.
Să ne reamintim...
• Prin transmisia tractorului se înŃelege totalitatea subansamblurilor
(mecanismelor) care transmit puterea motorului roŃilor motoare.
• prin intermediul transmisiei, se modifică viteza de deplasare şi forŃa
motoare (implicit şi forŃa de tracŃiune), permiŃând tractorului să se adapteze
diverselor condiŃii de exploatare.
• După modul de transmitere a puterii de la motor la roŃile motoare ale
tractorului, pot fi: mecanice, hidraulice, electrice sau combinate
(hidromecanice, electromecanice).
• După felul variaŃiei vitezei de deplasare a tractorului, transmisiile pot fi: în
trepte şi fără trepte (progresive).
U1.5 TRANSMISII HIDRAULICE
Transmisiile hidrostatice, spre deosebire de cele hidrodinamice, funcŃionează cu
presiuni foarte ridicate (la tractoare p = 16…35 MPa) şi cu viteze relativ reduse ale lichidului
de lucru (pentru tractoare v = 7…8 m/s). Vitezele de curgere ale lichidului de lucru fiind
reduse, pierderile de energie în conductele de legătură vor fi mici (aceste pierderi sunt, după
cum se ştie, proporŃionale cu pătratul vitezei de curgere a lichidului). Prin urmare, pompa şi
motorul hidraulic pot fi plasate la distanŃe mari între ele. În aceasta constă unul din cele mai

21
importante avantaje ale transmisiei hidrostatice, şi anume: posibilitatea transmiterii energiei la
distanŃe mari cu o amplasare liberă a subansamblurilor principale. Alte avantaje ale acestei
transmisii sunt:
• variaŃie continuă (fără trepte) a momentului de torsiune, între limite mari, şi
transmiterea lină a acestuia la roŃile motoare ale autovehiculului;
• funcŃionare stabilă a motorului în zona regimului optim;
• funcŃionare stabilă a motorului tractorului în zona regimului optim;
• posibilitatea de frânare cu transmisia însăşi;
• este reversibilă;
• funcŃionare stabilă a motoarelor hidraulice la turaŃii joase;
• asigură protecŃia motorului tractorului de suprasarcini prin folosirea unor procedee
tehnice simple;
• posibilitatea de folosire a energiei pompei pentru acŃionarea maşinilor purtate, a
maşinilor tractate, a organelor şi echipamentelor de lucru şi, de asemenea, pentru
servocomenzile hidraulice (posibilitatea de divizare a energiei o apropie de
transmisia electrică);
• asigură posibilităŃi largi de automatizare a regimului de lucru al autovehiculului
(corelare automată a vitezei de deplasare cu valoare forŃelor de rezistenŃă);
• simplifică comenzile autovehiculului;
• oferă posibilităŃi largi de unificare, tipizare şi normalizare a elementelor
componente ale transmisiei.
Dezavantajele transmisiei hidrostatice constau în următoarele:
• randament mai scăzut în comparaŃie cu transmisia mecanică (de regulă, η = 0,75…0,85; se apreciază însă că la presiuni ridicate randamentul poate atinge
valoarea 0,92 şi poate fi menŃinut la nivelul 0,8…0,85 în limite largi ale gamei de
lucru);
• greutatea specifică a transmisiei este mai mare în comparaŃie cu transmisia
mecanică (poate fi redusă prin creşterea presiunii de lucru şi a turaŃiei);
• tehnologia de fabricaŃie a elementelor sistemului hidraulic este mai complicată
(toleranŃe strânse şi complexitate mare a formei geometrice) şi necesită o calitate
ridicată a etanşărilor;
• necesită personal de înaltă calificare pentru întreŃinere şi reparaŃii;
• randamentul depinde într-o măsură însemnată de condiŃiile de temperatură;
• necesită încălzirea prealabilă a transmisiei în cazul exploatării autovehiculului la
temperaturi scăzute.
În figura 1.11 este dată schema hidraulică a transmisiei hidrostatice utilizată la un
tractor pe roŃi 4×2 Fordson Major (transmisia a fost executată de firma engleză Lucas).

22
Simbolizarea elementelor hidraulice este în conformitate cu cea recomandată în standardele
actuale.
Fig. 1.11 Schema hidraulică a unei transmisii hidrostatice.
Pompa 4 cu volum geometric de lucru variabil, de tipul cu pistoane axiale, este
acŃionată de motorul cu ardere internă M. Lichidul de lucru refulat de pompă intră în
motoarele hidraulice 5, care sunt cu pistoane radiale şi se află montate în roŃile motoare ale
tractorului. Din motoarele hidrostatice lichidul se întoarce în pompa 4, însă cu o presiune
considerabil mai mică. Pentru menŃinerea presiunii de lucru şi pentru compensarea pierderilor
de lichid se foloseşte pompa auxiliară (de alimentare) 2, acŃionată tot de motorul tractorului.
Lichidul de lucru intră în pompa auxiliară din rezervorul 7, care colectează, prin conducta de
drenaj 6, scăpările de lichid atât în pompă, cât şi de la motoarele hidraulice. Cele două
motoare hidraulice sunt legate între ele în paralel, realizându-se, astfel, o legătură de tip
diferenŃial între roŃile motoare ale tractorului. În cazul modificării sensului de deplasare a
tractorului, refularea lichidului de către pompa 2, în conducta corespunzătoare de joasă
presiune, se realizează prin sistemul de supape 3. Lichidul refulat de pompa 2 este curăŃat în
filtrul 1, iar surplusul de lichid se întoarce, prin supapa de siguranŃă (de descărcare) 8, în
rezervorul 7.
Transmisiile hidrostatice pot fi clasificate în două categorii principale: 1) cu
transformator hidrostatic şi 2) cu transformator hidromecanic.
În transformatoarele hidrostatice întreaga putere se transmite pe cale hidraulică, iar în
cele hidromecanice – pe cale hidraulică şi mecanică, în paralel.

23
În transformatoarele hidrostatice cu două fluxuri paralele de putere, pe cale
hidrostatică se transmite 50…60% din puterea motorului, iar restul pe cale mecanică (v. fig.
1.14, b). Avantajul acestei transmisii constă în aceea că are un randament mai ridicat, care nu
depinde aproape deloc de randamentul maşinilor hidraulice (pompă şi motor). Însă acest
avantaj îşi pierde din importanŃa sa dacă în schema transmisiei hidraulice se folosesc pompe şi
motoare cu randament ridicat. Această transmisie poate fi folosită numai în combinaŃie cu
elemente ale transmisiei mecanice (transmisii centrale şi finale), ceea ce reduce randamentul
total al transmisiei autovehiculului. Dezavantajele transformatoarelor hidromecanice, care
îngreuiază folosirea lor la automobile şi tractoare, sunt: imposibilitatea amplasării
independente a diferitelor ansambluri ale transmisiei; imposibilitatea inversării sensului pe
cale hidraulică; complicarea construcŃiei.
În continuare se prezintă câteva scheme de principiu ale transmisiilor hidrostatice
pentru diferite tipuri de tractoare.
Fig. 1.12. Scheme ale transmisiilor hidrostatice Lucas, utilizate la tractoare pe roŃi: 1 – roată motoare a tractorului; 2 – motor hidrostatic; 3 – pompă (principală) hidrostatică; 4 - motorul tractorului; 5 – pompă auxiliară (de alimentare); 6 – rezervor; 7 – filtru; 8 – supapă de siguranŃă; 9 – supapă unisens (de alimentare); 10 – dispozitiv pentru trecerea de la conectarea în paralel a motoarelor hidrostatice la funcŃionarea în serie a acestora.

24
În figura 1.12 se prezintă 4 scheme de transmisii hidrostatice utilizate la tractoare pe
roŃi 4×2 (firma engleză Lucas; conductele de drenaj nu sunt reprezentate).
Schema a corespunde transmisiei hidraulice din figura 1.11. Prin conectarea în paralel
a motoarelor hidrostatice, plasate în roŃile motoare, se asigură funcŃia de diferenŃial hidrostatic
între roŃile motoare, funcŃie analoagă diferenŃialului mecanic utilizat la autovehiculele pe roŃi.
Dacă roŃile motoare au aceeaşi turaŃie, uleiul refulat de pompă se distribuie în mod egal între
cele două motoare hidrostatice. Dacă roŃile motoare au turaŃii diferite, de exemplu, în viraj sau
când roŃile au patinări diferite, în motorul cu turaŃie mai mare intră mai mult ulei, iar în cel cu
turaŃie mai mică intră, în mod corespunzător, mai puŃin. Din punct de vedere dinamic, la
diferenŃialul hidrostatic se menŃine dezavantajul diferenŃialului mecanic, şi anume: calităŃile
de tracŃiune sunt limitate de roata cu aderenŃă mai slabă.
În scopul reducerii dimensiunilor de gabarit ale motoarelor hidrostatice în transmisie,
pentru unificarea şi tipizarea acestora cu pompa şi, în consecinŃă, pentru reducerea preŃului de
cost al transmisiei s-a propus schema b, în care se folosesc motoare hidrostatice cu turaŃie
ridicată, plasate înaintea transmisiei finale.
Spre deosebire de procedeul legării în paralel, în cazul legării motoarelor hidrostatice
în serie, întregul debit de ulei va trece mai întâi prin unul din motoare şi apoi prin celălalt
motor. Prin urmare, la acelaşi debit pe minut al pompei, turaŃia motoarelor (deci şi viteza
tractorului), în cazul legării în serie, creşte de două ori. Însă, prin legarea în serie a motoarelor
din stânga şi din dreapta, roŃile motoare ale punŃii respective vor avea turaŃii egale, indiferent
de repartizarea momentului între ele şi de condiŃiile de sol. Prin aceasta, efectul de diferenŃial
dispare, obŃinându-se o situaŃie analoagă blocării diferenŃialului. Uneori blocarea este utilă (ca
şi în cazul diferenŃialului mecanic), însă în condiŃii normale de exploatare este inadmisibilă.
De aceea, pentru trecerea de la legarea în paralel la legarea în serie, şi invers, a motoarelor
hidrostatice se folosesc dispozitive speciale (poz. 10 din fig.1.12, c).
În figura 1.12, d este prezentată o altă variantă a transmisiei hidrostatice, care
reprezintă, de fapt, un variator hidrostatic. Acesta înlocuieşte ambreiajul principal şi cutia de
viteze dintr-o transmisie mecanică obişnuită. Transmisia centrală, diferenŃialul şi transmisiile
finale rămân neschimbate. Rămâne nemodificată chiar construcŃia generală a tractorului.
Această variantă permite fabricarea unui anumit tip de tractor atât cu transmisie mecanică în
trepte, cât şi cu variator hidrostatic. Această variantă oferă , prin urmare, posibilităŃi largi de
tipizare între cele două tipuri de transmisii.
Variatorul hidrostatic reuneşte în acelaşi agregat pompa şi motorul (ambele cu debit
variabil, de tipul cu pistoane axiale) şi, de asemenea, dispozitivele hidraulice auxiliare
(sistemul de alimentare, supapele de siguranŃă, filtru, etc.). Randamentul unor asemenea
variatoare se află între limitele 0,85…0,95.
Folosirea transmisiilor hidrostatice la autovehicule permite să se realizeze relativ
simplu acŃionarea tuturor roŃilor motoare, îmbunătăŃindu-se, astfel, calităŃile de tracŃiune şi de

25
trecere ale acestora. În figura 1.13 sunt prezentate patru scheme hidraulice de principiu pentru
automobile şi tractoare pe roŃi 4×4.
Fig. 1.13. Variante de transmisii hidrostatice utilizate la tractoarele 4×4: 1 – motor hidrostatic; 2 –
roată motoare; 3 – transmisie finală; 4 – pompă cu debit variabil; 5 – divizor de debit.
AcŃionarea simultană a punŃilor motoare, din faŃă şi din spate, este posibilă folosind
diverse scheme hidraulice. Se apreciază că una din schemele cu cele mai largi posibilităŃi de
utilizare în viitor o constituie varianta cu motor hidrostatic în roŃile motoare. Dacă motoarele
punŃii din faŃă se leagă în paralel cu motoarele punŃii din spate (fig. 1.13, a), raportul forŃelor
tangenŃiale de tracŃiune ale celor două punŃi va fi constant, iar dinamica de tracŃiune a acestor
autovehicule va fi analoagă cu dinamica de tracŃiune a autovehiculelor cu diferenŃial
interaxial, a cărui frecare internă este practic neglijabilă. Dezavantajul esenŃial al acestei
scheme îl constituie limitarea performanŃelor de tracŃiune de către puntea motoare cu cele mai
proaste calităŃi de aderenŃă. Pentru eliminarea acestui dezavantaj sunt posibile alte scheme
care anulează efectul de diferenŃial dintre cele două punŃi. Astfel, prin modificarea volumului
geometric de lucru al motoarelor hidrostatice, legate în paralel, se poate obŃine orice raport
între forŃele tangenŃiale de tracŃiune ale roŃilor celor două punŃi şi, totodată, se egalizează
vitezele periferice ale roŃilor motoare. Aşadar, o asemenea blocare este posibilă prin folosirea
motoarelor hidrostatice cu volum geometric de lucru variabil (cu debit variabil) şi a unui
sistem de comandă adecvat.
Schemele următoare din figura menŃionată asigură (fără a lua în considerare pierderile
volumice de lichid) sincronizarea vitezelor periferice ale roŃilor celor două punŃi. Aceasta se
realizează prin: legarea în serie a motoarelor punŃii din faŃă cu motoarele punŃii din spate
(schema b; corespunde transmisiei mecanice fără diferenŃial interaxial); folosirea divizorului
de debit 5 (schema c) şi utilizarea unei pompe separate pentru motoarele fiecărei punŃi
(schema d).

26
Ca şi în cazul tractoarelor pe roŃi, la tractoarele pe şenile transmisia hidrostatică poate
înlocui în întregime transmisia mecanică sau numai o parte din ansamblurile ei (fig. 1.14).
Fig. 1.14. Variante de transmisii hidrostatice, utilizate la tractoarele pe şenile.
În schema a, transmisia hidrostatică îndeplineşte funcŃiile ambreiajului principal şi pe
cele ale unei cutii de viteze fără trepte. Pompa P este acŃionată de motorul cu ardere internă
(M.A.I.), iar motorul hidrostatic M, prin intermediul transmisiei centrale, mecanismele de
direcŃie (M.D.) şi transmisiile finale, antrenează roŃile motoare ale şenilelor.
În schema b, transmisia hidrostatică îndeplineşte aceleaşi funcŃii ca şi cea din schema
a. Însă, în cazul schemei b, puterea se transmite prin două fluxuri paralele de putere : o parte
din puterea motorului cu ardere internă se transmite pe cale mecanică (cca 40..50%), iar restul
pe cale hidrostatică. Întrucât prin transmisia hidrostatică nu se transmite întreaga putere a
motorului, dimensiunile de gabarit şi greutatea ei vor fi mai mici, iar randamentul total mai
mare. Cele două fluxuri de putere, prin intermediul unui diferenŃial de însumare, se reunesc
într-unul singur.
Schemele a şi b se pretează relativ uşor la automatizarea regimului de lucru şi a
comenzilor. Ele asigură o variaŃie continuă a vitezei de deplasare rectilinie a tractorului şi nu
influenŃează schema de obŃinere a virajului.
Schema c a transmisiei hidrostatice îndeplineşte toate funcŃiile unei transmisii
mecanice atât la deplasarea în linie dreaptă, cât şi la viraj. Ea se compune din două pompe P
şi două motoare M. Pompele se plasează, de obicei, aproape de motorul tractorului, iar
motoarele hidrostatice se plasează lateral, lângă transmisiile finale. Modificarea vitezei de
mers în linie dreaptă se obŃine prin deplasarea sincronă a organelor de reglare a celor două
pompe; acŃionând diferit organele de reglare a debitului, se realizează virajul. Această schemă
satisface cel mai bine condiŃiile impuse transmisiei tractoarelor pe şenile, întrucât permite o
variaŃie continuă atât a vitezei rectilinii de deplasare a tractorului, cât şi a razelor de viraj.
Însă această schemă provoacă dificultăŃi la automatizarea comenzilor tractorului. Cauza
constă în aceea că atât sistemul de comandă, cât şi tractoristul (care doreşte obŃinerea unei

27
anumite raze de viraj) acŃionează asupra aceloraşi organe de reglare, iar aceasta conduce (dacă
nu sunt prevăzute dispozitive speciale) la perturbarea regimurilor optime de deplasare.
În transmisiile hidrodinamice ponderea principală o are sarcina hidrodinamică a
curentului de lichid, iar ponderea sarcinii hidrostatice este relativ mică: presiunea lichidului
este mai mică de 1,0…1,5 MPa, iar viteza curentului de lichid ajunge până la 50…60 m/s.
Ambreiajele şi transformatoarele (convertizoarele) hidrodinamice se folosesc la
tractoare în combinaŃie cu transmisiile mecanice obişnuite. Asemenea transmisii se numesc
transmisii hidromecanice.
Studiul ambreiajelor şi a transformatoarelor hidrodinamice (teoria, calculul şi
construcŃia lor) constituie obiectul altor cursuri, de aceea, în capitolul de faŃă se face numai o
prezentare sumară a acestora.
În comparaŃie cu transmisiile mecanice obişnuite, transmisiile hidromecanice cu
ambreiaje hidrodinamice au următoarele avantaje:
• asigură pornirea şi demararea lină a tractorului, independent de îndemânarea
tractoristului (pornirea din loc este posibilă şi în trepte de viteze superioare);
• viteza tractorului se poate reduce până la zero fără decuplarea transmisiei, ceea ce
simplifică şi uşurează conducerea tractorului;
• măreşte capacitatea de trecere a tractorului datorită micşorării patinării sistemului
de rulare, ca urmare a eliminării creşterii bruşte a forŃei de tracŃiune la roŃile
motoare;
• se elimină posibilitatea opririi motorului când rezistenŃele la înaintare cresc (chiar
până la oprirea tractorului);
• protejează motorul şi transmisia de suprasolicitările ce apar la modificarea bruscă a
regimului de lucru al tractorului. Cu alte cuvinte, permite reducerea solicitărilor
dinamice în organele transmisiei şi motorului, mărind astfel fiabilitatea şi durata de
exploatare a tractorului;
• ambreiajul hidrodinamic izolează într-o măsură însemnată motorul de vibraŃiile cu
frecvenŃă mare, transmise de la organele de lucru prin transmisie, şi reduce
amplitudinea vibraŃiilor cu frecvenŃă joasă;
• permite funcŃionarea îndelungată cu alunecări mari între elementele conducătoare
şi cele conduse. Cu toate acestea, funcŃionarea ambreiajului hidrodinamic are loc,
practic, fără uzuri;
• nu necesită reglări în procesul exploatării tractorului;
• uşurează conducerea tractorului, mărind, astfel, securitatea muncii şi a circulaŃiei;
• favorizează procesul de automatizare a schimbării treptelor de viteze.
Totodată, ambreiajele hidrodinamice au şi câteva dezavantaje:
• nu permit o decuplare completă. Aceste ambreiaje întotdeauna conduc, ceea ce
îngreunează schimbarea treptelor de viteze;

28
• chiar în regimul optim de funcŃionare, ambreiajul hidrodinamic funcŃionează cu o
anumită patinare (alunecare) de 2…5%, ceea ce reduce economicitatea şi
productivitatea tractorului;
• nu asigură o frânare eficientă cu motorul, precum şi posibilitatea frânării la
staŃionarea în pantă prin cuplarea unei trepte în cutia de viteze;
• necesită, în calitate de lichid de lucru, uleiuri speciale cu viscozitate mică,
temperatură de congelare redusă etc.
În scopul eliminării acestor neajunsuri, s-au făcut diferite modificări constructive. De
exemplu, pentru decuplarea completă a motorului de transmisie, la schimbarea treptelor în
cutia de viteze, după ambreiajul hidrodinamic 2 s-a introdus un ambreiaj mecanic cu fricŃiune
3, legat în serie cu primul (fig. 1.15, a). Aceasta complică însă construcŃia transmisiei. De
aceea, este mai raŃională folosirea ambreiajelor hidrodinamice în combinaŃie cu cutiile de
viteze planetare, ale căror elemente de fricŃiune (frâne şi ambreiaje) îndeplineşte rolul
ambreiajului 3 din figura menŃionată mai sus.
Fig. 1.15. Scheme de transmisii hidromecanice: a – cu ambreiaj hidrodinamic; b – cu transformator hidrodinamic: 1 – motor; 2 – ambreiaj /transformator hidrodinamic; 3 – ambreiaj cu fricŃiune; 4 - cutia de viteze; 5 – diferenŃial; 6 – transmisie finală; 7 – roată motoare; P – pompă; T – turbină: R – reactor; C – cuplaj unisens.
Pentru creşterea economicităŃii tractorului, se obişnuieşte ca printr-o serie de procedee
să se unească rigid pompa şi turbina ambreiajului. Această blocare se poate realiza automat
1 2 3 4 5
6 7
P T
a)
1 2 C 4 5
6 7 T P R
b)

29
sau printr-o comandă manuală şi se recomandă să se facă după ce tractorul funcŃionează în
regim stabilizat.
Transmisiile hidromecanice cu transformator hidrodinamic (fig. 1.15, b) posedă
avantajele ambreiajelor hidrodinamice şi, în plus, ele asigură corelarea automată a vitezei de
deplasare cu forŃa de tracŃiune, în funcŃie de condiŃiile de exploatare. În acest fel, se uşurează
munca tractoristului şi se măreşte productivitatea şi economicitatea tractorului.
Coeficientul de transformare al transformatorului hidrodinamic, definit prin raportul
k = MTurbină /MPompă , are valori între limitele 1,9…8, în funcŃie de tipul transformatorului, iar
pentru valori ridicate ale randamentului, se află între limite mult mai înguste: 1,5…2,5. Aceste
valori sunt nesatisfăcătoare pentru a asigura o funcŃionare normală a tractorului. ForŃa de
rezistenŃă totală se modifică în timpul exploatării tractorului de 8…12 ori, uneori, chiar mai
mult.
Prin urmare, folosirea în cadrul transmisiei a unui singur transformator hidrodinamic
nu poate asigura tractorului calităŃile cinematice, dinamice, de tracŃiune şi economice
necesare. Aceasta impune folosirea suplimentară a unei cutii de viteze mecanice în trepte care
să asigure gama de variaŃie a momentului la roŃile motoare. În afară de aceasta, cutia de viteze
mecanică serveşte pentru obŃinerea mersului înapoi al tractorului.
Pentru ameliorarea randamentului transmisiei, transformatoarele hidrodinamice (THD)
au fost supuse unor modificări constructive importante. De exemplu, la transformatorul
hidrodinamic din figura 1.15, b, reactorul R se leagă de carterul transmisiei prin cuplajul
unisens C. Acest cuplaj permite ca în domeniul alunecărilor mari ale turbinei T în raport cu
pompa P (când ηΤHD>ηΑΗD), reactorul R să rămână fix, iar la alunecări mici el se poate roti
liber, astfel încât transformatorul să lucreze în regim de ambreiaj hidrodinamic (AHD), când
ηΤHD<ηΑΗD. Aceste transformatoare hidrodinamice se numesc complexe. La tractoare se
utilizează frecvent transformatoare hidrodinamice cu blocare, adică transformatoare la care,
la anumite regimuri de funcŃionare, rotorul turbinei şi cel al pompei se blochează: se uneşte
rigid arborele conducător cu cel condus.
Transmisiile hidromecanice au obŃinut o largă utilizare la tractoarele industriale.
Aceste transmisii adaptează cel mai bine tractorul industrial la regimurile de exploatare ale
acestuia: forŃele de rezistenŃă se modifică des şi brusc, necesită schimbări dese ale vitezei şi
ale sensului de deplasare.
În figura 1.16 este prezentată schema cinematică a transmisiei hidromecanice a unui
tractor pe şenile. Mişcarea ajunge la cutia de viteze de la un transformator hidromecanic
compus dintr-un transformator hidrodinamic (convertizor) şi un reductor planetar (pe braŃul
portsatelit se însumează cele două fluxuri de putere: mecanic şi hidraulic). De la cutia de
viteze 2 puterea se transmite celor două şenile prin transmisia centrală 3, ambreiajul de
direcŃie 4 şi transmisia finală 6.

30
Fig. 1.16. Schema cinematică a transmisiei hidromecanice a unui tractor pe şenile: 1 – transformator hidromecanic; 2 – cutie de viteze cu cuplare sub sarcină; 3 – transmisie centrală; 4 – ambreiaje de direcŃie; 5 – frâne cu bandă; 6 – transmisia finală; T – turbină; P – pompă; R – reactor; F1, F2, F3, F4 şi F5 – frâne disc.
Tabelul 1.1 Modul de realizare a treptelor de viteze în transmisia unui tractor pe şenile.
Treapta de viteze I II III Mers înainte F1, F5 F1, F3 F1, F4 Frâne acŃionate Mers înapoi F2, F5 F2, F3 F2, F4
Cutia de viteze asigură trei trepte pentru mers înainte şi trei pentru mers înapoi, prin
cuplarea frânelor disc corespunzătoare. Modul de realizare a treptelor rezultă din tabelul 1.1.
U1.6. Rezumat
În cadrul acestei unităŃi de învăŃare s-au prezentat rolul, percum şi o
clasificare a transmisiilor tractoarelor.
S-a pus accent pe prezentarea transmisiilor mecanice, precum şi pe
transmisiile hidrostatice, hidrodinamice şi hidromecanice ale tractoarelor 4×4, 4×2 şi
pe şenile, făcându-se o exemplificare bogată şi diversificată pe cele mai
reprezentative tractoare româneşti şi pe tractoare ale unor firme străine de prestigiu.
Exemplele au fost însoŃite de detalieri constructive şi funcŃionale.

31
U1.7. Test de evaluare a cunoştinŃelor
1. Ce condiŃii trebuie să îndeplinească transmisia unui tractor?
2. Pentru schema din figura următoare, se cere:
a) să se identifice poziŃiile numerotate;
b) numărul treptelor de viteze ale transmisiei;
c) numărul treptelor de turaŃii realizat de reductorul prizei de putere.

32
Unitatea de învăŃare 2. Regimul de calcul al transmisiei tractoarelor la solicitări statice
Cuprins
U2.1. Introducere .......................................................................................................... 32
U2.2. CompetenŃe ......................................................................................................... 32
U2.3. Regimul de calcul la solicitări statice în cazul tractoarelor pe roŃi ..................... 33
U2.4. Regimul de calcul la solicitări statice în cazul tractoarelor pe şenile ................. 37
U2.5. Rezumat .............................................................................................................. 38
U2.6. Test de autoevaluare a cunoştinŃelor................................................................. ..38
U2.1. Introducere
În cadrul acestei unităŃi de învăŃare se prezintă metodica de calcul a
transmisiei mecanice la solicitări statice, pornind de la următoarea constatare.
CalităŃile de tracŃiune ale tractoarelor sunt limitate fie de puterea motorului
(tractorul este încărcat până când motorul se opreşte), fie de aderenŃa sistemului de
rulare cu solul (tractorul este încărcat până când patinează complet). Acest lucru
este pus în evidenŃă de cercetările teoretice şi experimentale, precum şi de
exploatarea curentă a tractoarelor.
U2.2. CompetenŃele unităŃii de învăŃare
După parcurgerea materialului acestei unităŃi de învăŃare studenŃii vor fi
capabili:
• să cunoască metodica de calcul a transmisiei mecanice la solicitări statice pentru
tractoare pe roŃi şi pe şenile;
• să stabilească regimul de calcul pentru orice piesă sau orice subansamblu al
transmisiei tractorului pe roŃi;
• să stabilească regimul de calcul pentru orice piesă sau orice subansamblu al
transmisiei tractorului pe şenile.
Durata medie de parcurgere a acestei unităŃi de învăŃare este de 3 ore.

33
U2.3. REGIMUL DE CALCUL LA SOLICITĂRI STATICE ÎN CAZUL
TRACTOARELOR PE ROłI
Pentru stabilirea momentului de calcul se poate folosi următoarea metodică:
• Se determină momentul de torsiune Mcm transmis de motor organului respectiv,
folosindu-se relaŃia: ,''ηiMM ncm = (2.1)
în care:
Mn - momentul nominal al motorului;
i' - raportul de transmitere de la motor până la piesa care se calculează;
η’ - randamentul transmisiei pe aceeaşi porŃiune.
Pentru organele transmisiei plasate după arborele secundar al cutiei de viteze trebuie
să se ia în considerare posibilităŃile de divizare a puterii.
• Se determină momentul de torsiune Mcϕ care poate fi realizat din condiŃia de
aderenŃă:
,""η
ϕϕ i
rZM c = (2.2)
în care: Z-sarcina verticală aderentă care limitează momentul de torsiune în punctul
considerat (v. exemplele următoare);
ϕ - coeficient de aderenŃă (în mod obişnuit, în cazul tractoarelor pe roŃi
se adoptă ϕ = 0,8);
r - raza dinamică a roŃii;
i” - raportul de transmitere de la piesa care se calculează până la roata/roŃile
motoare pe care acŃionează sarcina Z;
η” - randamentul corespunzător lanŃului cinematic considerat.
Din cele de mai sus rezultă: i’⋅i” = itr şi η’⋅η” = ηtr, unde itr este raportul total de
transmitere al transmisiei, iar ηtr - randamentul total al transmisiei.
• Se compară momentul de torsiune Mcm cu Mcϕ şi, dacă cele două momente nu sunt
egale, calculul se face la momentul cel mai mic.
Prin urmare, momentul de calcul la solicitări statice
( ).,min ϕccmc MMM = (2.3)
Momentul Mc este momentul maxim realizabil (este un moment potenŃial):
• dacă Mcm < Mcϕ − motorul se opreşte (calează), momentul realizabil este Mcm;
• dacă Mcm > Mcϕ − tractorul patinează total, momentul realizabil este Mcϕ.
Momentul de torsiune realizabil este, aşadar, momentul minim dintre cele două.
La determinarea momentului de torsiune Mcϕ din condiŃia de aderenŃă cu solul trebuie
să se ia în considerare faptul că la tractoarele pe roŃi sarcina verticală care acŃionează asupra
roŃilor motoare poate varia în timpul în timpul exploatării ca urmare a următoarelor cauze:
lestarea tractorului, redistribuirea sarcinilor verticale între punŃi sub influenŃa greutăŃii

34
maşinilor şi uneltelor purtate, a forŃei de tracŃiune şi a interacŃiunilor în sistemul tractor –
maşină agricolă – sol. De aceea, la stabilirea greutăŃii aderente a tractoarelor pe roŃi trebuie să
se ia în considerare cazul cel mai defavorabil, însă posibil, de încărcare a roŃilor motoare.
Dacă nu sunt date suficiente pentru determinarea sarcinilor verticale maxime pe roŃi,
sarcina pe un pneu se adoptă egală cu capacitatea de încărcare a acestuia, care depinde de
tipul şi dimensiunile pneului şi de presiunea aerului din el.
Fig. 2.1. Schema bloc a transmisiei unui tractor pe roŃi 4×2.
Pentru organele transmisiei plasate după diferenŃial trebuie să se aibă în vedere
particularităŃile dinamice ale acestuia, şi anume distribuirea momentului de torsiune de la
carcasa diferenŃialului între cei doi arbori planetari. Pentru determinarea momentelor de
torsiune la fiecare arbore planetar se foloseşte schema din figura 2.2, din care rezultă:
+=
+=
⇒
=
=+
λ
λλ
λ1
11
ddr
dst
dr
st
ddrst
MM
MM
M
M
MMM
. (2.4)
unde λ este coeficient de blocare a diferenŃialului, care are următoarele valori:
• λ =1,15...1,2 pentru diferenŃiale neblocabile;
• λ = 3...5 pentru diferenŃiale autoblocabile;
• λ = ∞ pentru diferenŃiale cu blocare facultativă.
În tabelul 2.1 sunt prezentate relaŃiile de calcul în patru puncte caracteristice ale
transmisiei unui tractor 4×2, a cărei schemă bloc este dată în figura 2.1. Fig. 2.2. Schema bloc a diferenŃialului cu momentele de
calcul.

35
Tabelul 2.1
Momentul de calcul în patru puncte caracteristice ale transmisiei tractorului 4×2
Momentul de calcul Punctul în fig.2.1 Limitat de motor Limitat de aderenŃă
Momentul de calcul adoptat
1 ncm MM = trtr
c i
rGM
ηϕ
ϕ'
= ( )ϕccmc MMM ,min=
2 cvcvncm iMM η= ffcc
c ii
rGM
ηηϕ
ϕ'
= ( )ϕccmc MMM ,min=
3 λ
ληη
+=
1cccvcvncm iiMM ff
c i
rQM
ηϕ
ϕ = ( )ϕccmc MMM ,min=
4 λ
λη
+=
1trtrncm iMM rQM c ϕϕ = ( )ϕccmc MMM ,min=
La tractoarele 4×4 (fig. 2.3), pentru organele transmisiei plasate înainte de divizarea
fluxului de putere la cele două punŃi motoare, momentul de calcul se stabileşte luându-se în
considerare întreaga greutate a tractorului.
Fig. 2.3. Schema bloc a transmisiei unui tractor pe roŃi 4×4.
Astfel, pentru punctul 1 din figura 2.3 momentul de calcul se stabileşte folosind
relaŃiile:
;ncm MM =
;22
22
11
11
trtrtrtrc i
rG
i
rGM
ηϕ
ηϕ
ϕ +=
întrucât

36
trtrtrtrtrtr i
r
i
r
i
r
ηηη=≅
22
2
11
1 ,
se poate scrie
22
2
11
1
trtrtrtrc i
rG
i
rGM
ηϕ
ηϕ
ϕ == .
Adică se poate considera că întreaga greutate a tractorului este plasată fie pe puntea
din faŃă, fie pe puntea din spate, iar momentul din condiŃia de aderenŃă este redus la arborele
ambreiajului folosind parametrii punŃii motoare corespunzătoare. Evident, şi în acest caz, momentul de calcul va fi: ( )ϕccmc MMM ,min= .
Tabelul 2.2
Momentul de calcul în opt puncte caracteristice ale transmisiei tractorului 4×4
Momentul de calcul Punctul în fig.2.3 Limitat de motor Limitat de aderenŃă
Momentul de calcul adoptat
1 ncm MM = 22
2
11
1
trtrtrtrc i
rG
i
rGM
ηϕ
ηϕ
ϕ == ( )ϕccmc MMM ,min=
2 cvcvncm iMM η=
cv
tr
cv
tr
cv
tr
cv
trc
i
irG
i
irG
M
ηηϕ
ηηϕ
ϕ22
2
11
1 == ( )ϕccmc MMM ,min=
3 cvcvncm iMM η= 2222
22
ffccc ii
rGM
ηηϕ
ϕ = ( )ϕccmc MMM ,min=
4 2
222 1 λ
ληη
+= cccvcvncm iiMM
22
22
ffc i
rQM
ηϕ
ϕ = ( )ϕccmc MMM ,min=
5 2
222 1 λ
λη
+= trtrncm iMM 22 rQM c ϕϕ = ( )ϕccmc MMM ,min=
6 rrcvcvncm iiMM ηη= 1111
11
ffccc ii
rGM
ηηϕ
ϕ = ( )ϕccmc MMM ,min=
7 1
111 1 λ
ληηη
+= ccrrcvcvncm iiiMM
11
11
ffc i
rQM
ηϕ
ϕ = ( )ϕccmc MMM ,min=
8 1
111 1 λ
λη
+= trtrncm iMM 11 rQM c ϕϕ = ( )ϕccmc MMM ,min=
În mod analog, în punctul 2 din figura 2.3 momentul de calcul va fi:
.;;;;; 22
11
22
11
12
2
11
1
cv
trtr
cv
trtr
cv
trtr
cv
trtr
trtrtrtrccvncm i
ii
i
ii
i
rG
i
rGMiMM
ηη
ηηη
ηηϕ
ηϕ
ϕ =′′=′′=′′=′′′′′′
=′′′′
==
Pentru celelalte puncte ale transmisiei momentele de calcul sunt date în tabelul 2.2.

37
Să ne reamintim...
• Se determină momentul de torsiune Mcm transmis de motor organului
respectiv, folosindu-se relaŃia:
'.'ηiMM ncm =
• Se determină momentul de torsiune Mcϕ care poate fi realizat din condiŃia
de aderenŃă:
.""ηi
rφZM c =
• Se compară momentul de torsiune Mcm cu Mcϕ; momentul de calcul la
solicitări statice va fi momentul cel mai mic:
( ).,min ϕccmc MMM =
U2.4 REGIMUL DE CALCUL LA SOLICITĂRI STATICE ÎN CAZUL
TRACTOARELOR PE ŞENILE
Şi în cazul acestor tractoare se foloseşte aceeaşi metodă de calcul. Se consideră că
tractorul este exploatat pe o pantă transversală, când repartiŃia greutăŃii pe cele două şenile
este cea din figura 2.5. La stabilirea momentului transmis de motor se are în vedere că la viraj
întreaga putere se transmite unei singure şenile.
În continuare, se stabileşte momentul de calcul în cinci puncte ale transmisiei, a cărei
schemă bloc este dată în figura 2.4, comparându-se momentul transmis de motor cu cel din
condiŃia de aderenŃă.
Fig. 2.5. RepartiŃia greutăŃii pe
cele două şenile.
Fig. 2.4. Schema bloc a unui tractor pe şenile.

38
• În punctul 1: ( ).,min;; ϕϕ ηϕ
ccmctrtr
cncm MMMi
rGMMM ===
• În punctul 2:
( ) .;.;,min;;cv
trtr
cv
trtrccmc
trtrccvcvncm i
iiMMM
i
rGMiMM
ηη
ηηϕ
η ϕϕ =′′=′′=′′′′
==
• În punctul 3: ( ).,min;65,0
; ϕϕ ηηϕ
ηη ccmcddff
ccccvcvncm MMMii
rGMiiMM ===
• În punctul 4: ( ).,min;65,0
; ϕϕ ηϕ
ηηη ccmcff
cddcccvcvncm MMMi
rGMiiiMM ===
• În punctul 5: ;65,0; rMiMM ctrtrncm ϕη ϕ == ( ).,min ϕccmc MMM =
În cazul tractoarelor cu ambreiaje de direcŃie id = 1, ηd = 1, iar în cazul utilizării
mecanismelor planetare de direcŃie id > 1, ηd < 1.
Raza dinamică r a roŃii motoare se calculează din relaŃia:
,2
2π
πzt
rrzt ss =⇒= (2.5)
în care:
ts este pasul şenilei;
z - numărul de zale care se înfăşoară pe roata motoare în timpul unei rotaŃii.
U2.5. Rezumat
În cadrul acestei unităŃi de învăŃare se prezintă o metodică de stabilire a
regimului decalc a transmisiei mecanice la solicitări statice.
Metoda constă în parcurgerea unui algortim în 3 paşi:
1. Se determină momentul de torsiune Mcm transmis de motor organului care se
calculează;
2. Se determină momentul de torsiune Mcϕ care poate fi realizat din condiŃia de
aderenŃă, redus la piesa care se calculează;
3. Se compară momentul de torsiune Mcm cu Mcϕ, momentul de calcul la
solicitări statice va fi momentul cel mai mic dintre cele două.
U2.6. Test de autoevaluare a cunoştinŃelor
1. În mod obişnuit, valoarea coeficientului de aderenŃă ϕ , în cazul tractoarelor pe
roŃi, se adoptă:
a) ϕ = 0,4;
b) ϕ = 0,8;
c) ϕ = 0,5.

39
2. În cazul tractoarelor cu ambreiaje de direcŃie:
a) id = 1, ηd = 1;
b) id < 1, ηd < 1;
c) id > 1, ηd < 1.
3. Pentru un tractor pe roŃi 4×4 se cunosc: raportul total de transmitere al
transmisiei punŃii spate itr2=192, raportul de transmitere din cutia de viteze icv=12,
raportul de transmitere al transmisiei centrale a punŃii spate ic2=4, raza dinamică a
roŃii punŃii din spate r2=0,75m, turaŃia motorului n=1800 rot/min. Se cere să se
determine:
a) raportul de transmitere al transmisiei finale a punŃii spate;
b) turaŃia roŃilor punŃii spate;
c) viteza teoretică a tractorului.
4. Pentru un tractor pe şenile cu mecanisme de direcŃie cu ambreiaje se cunosc
următoarele: raportul total de transmitere al transmisiei itr=160, raportul de
transmitere al transmisiei finale if=4; momentul nominal al motorului Mn=450
Nm, greutatea tractorului G=100 kN; randamentele ηcv=0,94; ηc= ηf =0,97; raza
dinamică a roŃii motoare r=0,4 m. Se mai cunoaşte că la o turaŃie a motorului de
n=1600 rot/min, turaŃia arborelui pinionului conic al transmisiei centrale este
nc=160 rot/min. Se va considera valoarea coeficientului de aderenŃă φ=0,8. Se
cere să se determine momentul de calcul al arborelui pinionului conic.
Răspunsuri:
1) b;
2) a;
3.a) if2=4; 3.b) 9,375 rot/min; 3.c) 0,736 m/s=2,65 km/h;
4) Mcm=4230 Nm; Mcφ=2126 Nm; Mc=min(Mcm, Mcφ)=2126 Nm.

40
Unitatea de învăŃare 3. Determinarea regimului de calcul la solicitări dinamice şi la oboseală
Cuprins
U3.1. Introducere .......................................................................................................... 40
U3.2. CompetenŃe ......................................................................................................... 40
U3.3. Determinarea regimului de calcul la solicitări dinamice .................................... 41
U3.4. Determinarea aproximativă a momentului de calcul la oboseală ....................... 41
U3.5. Rezumat .............................................................................................................. 43
U3.6. Test de autoevaluare a cunoştinŃelor................................................................. ..44
U3.1. Introducere
În cadrul acestei unităŃi de învăŃare sunt prezentate principiile de bază
pentru stabilirea regimului de calcul al transmisiei mecanice la solicitări dinamice
şi la oboseală.
Pentru stabilirea momentului dinamic se alcătuiesc modelele dinamic şi
matematic ale sistemului tractor-echipament de lucru şi, folosind calculatoarele
electronice, se determină solicitările dinamice în diferite organe ale transmisiei, în
anumite condiŃii iniŃiale.
Dacă nu sunt date suficiente referitoare la timpul de utilizare a tractorului
la fiecare treaptă de viteză, precum şi asupra solicitărilor corespunzătoare, poate fi
folosită o metodă aproximativă de stabilire a regimului de calcul la oboseală,
descrisă mai jos.
U3.2. CompetenŃele unităŃii de învăŃare
După parcurgerea materialului acestei unităŃi de învăŃare studenŃii vor fi
capabili:
• să cunoască metodica de determinare a regimului de calcul a transmisiei
mecanice la solicitări dinamice pentru tractoare pe roŃi şi pe şenile;
• să cunoască metodica de determinare a regimului de calcul a transmisiei
mecanice la oboseală;
• să stabilească regimul de calcul pentru orice piesă sau orice subansamblu al
transmisiei tractorului pe roŃi sau pe şenile.
Durata medie de parcurgere a acestei unităŃi de învăŃare este de 1,5 ore.

41
U3.3. DETERMINAREA REGIMULUI DE CALCUL LA SOLICITĂRI
DINAMICE
În cazul tractoarelor pe roŃi, în primă aproximaŃie, momentul dinamic de calcul la
fiecare treaptă a transmisiei, redus la arborele ambreiajului principal, este egal cu momentul
minim ce rezultă din compararea următoarelor două momente:
• pentru tractoare cu ambreiaje monodisc
);,min(;2
;5,1 dddtrtr
adad MMM
i
rGMMM ′′′==′′=′
ηϕ
• pentru tractoare cu ambreiaje bidisc
);,min(;2
;2,1 dddtrtr
adad MMM
i
rGMMM ′′′==′′=′
ηϕ
în care:
Ma este momentul de frecare din ambreiaj (Ma = βΜn);
β - coeficientul de siguranŃă (de rezervă) al ambreiajului principal;
Ga - greutatea aderentă a tractorului;
itr - raportul total de transmitere al transmisiei;
ηtr - randamentul total al transmisiei.
În cazul tractoarelor pe şenile, momentul dinamic maxim la arborele ambreiajului
principal Md max se calculează în funcŃie de momentul de frecare din ambreiaj. • în cazul ambreiajelor monodisc ;5,1max ad MM =
• în cazul ambreiajelor bidisc .2,1max ad MM =
Şi celelalte ambreiaje din cadrul transmisiei pot limita solicitările dinamice şi de aceea
în modelele matematice trebuie să se prevadă restricŃii suplimentare.
Indiferent de tipul tractorului, momentele dinamice la ceilalŃi arbori se determină în
funcŃie de momentul maxim la arborele ambreiajului principal, adică momentul maxim se
reduce la piesa care se calculează.
Cu ajutorul acestor momente se face numai un calcul de verificare, şi anume: la aceste
valori ale momentului de torsiune, tensiunile în piesele verificate nu trebuie să depăşească
limita de curgere a materialului.
U3.4 DETERMINAREA APROXIMATIVĂ A MOMENTULUI DE CALCUL
LA OBOSEALĂ
Dacă nu sunt date suficiente referitoare la timpul de utilizare a tractorului la fiecare
treaptă de viteză, precum şi asupra solicitărilor corespunzătoare, poate fi folosită următoarea
metodă de calcul. Toate treptele de viteze ale transmisiei tractorului se divizează în trei grupe:
lente, de lucru şi de transport. Timpul de exploatare pentru fiecare treaptă de lucru se adoptă
(chiar dacă în urma divizării timpului total pe trepte rezultă un timp mai mic) între limitele

42
1500…3000 de ore, iar pentru treptele lente şi de transport 200…1000 de ore. Mersul înapoi,
în funcŃie de destinaŃia tractorului, intră în categoria treptelor de lucru sau de transport.
Atingerea unor asemenea durate de exploatare este posibilă numai în anumite condiŃii de
exploatare.
Ponderea utilizării anumitor roŃi dinŃate din cutia de viteze se stabileşte considerând că
durata totală de funcŃionare a acesteia este de minimum 8000…10000 de ore. Durata de
funcŃionare a ansamblurilor transmisiei de tractor, plasate după cutia de viteze, trebuie să fie
de minimum 8000…10000 de ore. Pentru stabilirea regimului de calcul al acestor ansambluri
se consideră că ele se folosesc la treptele de lucru 5000…8000 de ore, iar cele lente şi de
transport 2000…3000 de ore. Organele transmisiei prizei de putere se calculează
considerându-se o durată de funcŃionare de 3000 de ore.
Calculul aproximativ la oboseală se face la un moment mediu: • cmed MM 8,0= pentru tractoarele pe roŃi 4×2, la treptele de lucru;
• cmed MM )9,0...8,0(= pentru tractoarele pe roŃi 4×4, la treptele de lucru;
• cmed MM 9,0= pentru tractoarele pe senile, la treptele de lucru;
• cmed MM 6,0= pentru treptele lente şi de transport, indiferent de tipul
tractorului,
unde Mc este momentul de torsiune minim dintre momentul transmis de motor şi momentul
din condiŃia de aderenŃă, stabilit cu metodica din unitatea de învăŃare anterioară.
La tractoarele pe roŃi 4×4 se consideră că momentul transmis de motor după arborele
de divizare a puterii în două fluxuri este direct proporŃional cu greutatea aderentă a punŃilor
motoare, urmând ca acest moment să se compare cu cel din condiŃia de aderenŃă. Pentru
analiza acestei probleme se foloseşte figura 3.1. Pentru arborele secundar, momentul de calcul
M (la treapta I din cutia de viteze) la solicitări statice se obŃine comparând momentul transmis
de motor cu cel din condiŃia de aderenŃă:
( ).,min;;;; 22
11
122
2
11
1ϕϕ η
ϕηϕ
η ccmcv
tr
cv
trccvcvncm MMM
i
ii
i
ii
i
rG
i
rGMiMM ==′′=′′
′′′′=
′′′′==
M1
M2M
C.V.(λ2)D2
2
1
ic2, ηc2
.3ir, ηr
Fig. 3.1. Divizarea momentului de torsiune la cele două punŃi motoare

43
Momentul M1, transmis punŃii din faŃă, şi M2, transmis punŃii din spate, se determină
din următorul sistem de ecuaŃii:
.; 212
2
11
2
1
2
1
21
GGG
G
GMM
G
GMM
G
G
M
M
MMM
=+
=
=⇒
=
=+
Momentul M1 şi, respectiv, M2 se reduce, în fiecare caz în parte, la piesa care se
calculează. De exemplu:
• în punctul 2: .8,0;11 2
222
2
2
2222 cmedccccc MMi
G
GMiMM =
+=
+=
λλ
ηλ
λη
• în punctul 3: .8,0;11 cmedrrrrc MMi
G
GMiMM === ηη
Cu ajutorul raportului Mmed /Mc se determină coeficientul de sarcină (de durată) kt
pentru fiecare treaptă:
( ) −= 9cmedt MMk pentru calculul la încovoiere al roŃilor dinŃate cementate sau cianurate;
( ) −= 6cmedt MMk pentru calculul la încovoiere al roŃilor dinŃate îmbunătăŃite;
( ) −=′ 3cmedt MMk pentru calculul roŃilor dinŃate la presiunea de contact.
Între timpul echivalent (calculat) TE şi timpul efectiv Ti există următoarea relaŃie: ,tEi kTT = şi, respectiv, .tEi kTT ′′=
Dacă roŃile dinŃate funcŃionează la mai multe trepte, se calculează mărimile TE şi Ti´
pentru fiecare treaptă.
Dacă Mc = Mmed , kt = kt´ = 1. Prin urmare, dacă se alege pentru calculul la oboseală
momentul Mmed , calculele devin mai simple.
U3.5. Rezumat
În cadrul acestei unităŃi de învăŃare au fost prezentate principiile de bază
pentru stabilirea regimului de calcul al transmisiei mecanice la solicitări dinamice şi
la oboseală.
Sunt prezentate relaŃii de calcul pentru momentul de calcul la solicitări
dinamice pentru diferite tipuri de tractoare (4×2, 4×4 şi pe şenile) şi pentru diferite
tipuri de trepte de viteze (de lucru, lente sau de transport).
A fost prezentată o metodă aproximativă de stabilire a regimului de calcul la
oboseală, metodă care poate fi folosită dacă nu există date suficiente referitoare la
timpul de utilizare a tractorului la fiecare treaptă de viteză, precum şi asupra
solicitărilor corespunzătoare.

44
U3.6. Test de autoevaluare a cunoştinŃelor
1. Cum se stabileşte momentul dinamic de calcul, redus la arborele ambreiajului
principal în cazul tractoarelor pe roŃi?
2. Cum se stabileşte momentul dinamic maxim, redus la arborele ambreiajului
principal în cazul tractoarelor pe şenile?
3. Cât este durata totală minimă de funcŃionare a transmisiei tractorului?
4. Cât este durata totală minimă de funcŃionare a subansamblurilor tractorului
plasate după cutia de viteze?
5. Cât este durata totală minimă de funcŃionare a organelor transmisiei prizei de
putere?
Răspunsuri:
1) vezi subcap. U3.3;
2) vezi subcap. U3.3;
3) 8000 … 10000 ore;
4) 8000 … 10000 ore; 5) 3000 ore.

45
Unitatea de învăŃare 4. Amplificatoare de cuplu
Cuprins
U4.1. Introducere .......................................................................................................... 45
U4.2. CompetenŃe ......................................................................................................... 45
U4.3. Amplificatoare de cuplu...................................................................................... 46
U4.3.1. Amplificatoare de cuplu planetare......................................................... 46
U4.3.2. Amplificatoare de cuplu neplanetare..................................................... 49
U4.4. Rezumat .............................................................................................................. 51
U4.5. Test de autoevaluare a cunoştinŃelor................................................................. ..51
U4.1. Introducere
În cadrul acestei unităŃi de învăŃare sunt prezentate rolul, clasificarea,
scheme şi detalii funcŃionale ale amplificatoarelor de cuplu utilizate în transmisiile
mecanice ale tractoarelor. De asemenea sunt tratate şi elemente de calcul ale
componentelor amplificatoarelor de cuplu.
U4.2. CompetenŃele unităŃii de învăŃare
După parcurgerea materialului acestei unităŃi de învăŃare studenŃii vor fi
capabili:
• să identifice tipurile de amplificatoare de cuplu utilizate în transmisiile mecanice
ale tractoarelor;
• să cunoască principiul de funcŃionare a unui amplificator, pornind de la schema
constructivă sau cinematică a acestuia;
• să efectueze regimul de calculul de dimensionare şi rezistenŃă necesar proiectării
amplificatoarelor;
• să efectueze calculul pompei de ulei.
Durata medie de parcurgere a acestei unităŃi de învăŃare este de 2 ore.

46
U4.3. AMPLIFICATOARE DE CUPLU
Amplificatoarele de cuplu au următoarele caracteristici tehnice generale (fig. 4.1):
• se montează între ambreiajul principal şi cutia de viteze; • au două rapoarte de transmitere: 11 >= aa ii şi ;12 == aa ii
• trecerea de la un raport de transmitere la celălalt se face fără întreruperea fluxului
de putere;
• treapta principală de lucru (cuplată în mod obişnuit) este treapta ia2 = 1 (la această
treaptă randamentul amplificatorului de cuplu este maxim, apropiat de unu).
Treapta ia1 > 1 se foloseşte numai pentru depăşirea unor obstacole temporare.
Fig. 4.1. Schema bloc de plasare în transmisie a amplificatorului de cuplu.
Amplificatoarele de cuplu se clasifică în:
1) amplificatoare de cuplu planetare: a) cu cuplaj unisens;
b) fără cuplaj unisons.
2) amplificatoare de cuplu neplanetare: a) cu cuplaj unisons;
b) fără cuplaj unisens.
U4.3.1 Amplificatoare de cuplu planetare.
Amplificatorul de cuplu din figura 4.2., a se montează între ambreiajul principal şi
arborele primar al cutiei de viteze. El se compune dintr-un ambreiaj de blocare A, un cuplaj
unisens C cu role şi un mecanism planetar cu o treaptă. Partea condusă a ambreiajului A este
legată de braŃul portsatelit H. Când ambreiajul de blocare este cuplat, roata centrală 1 şi braŃul
portsatelit au aceeaşi viteză unghiulară şi, prin urmare, întregul mecanism formează din punct
de vedere cinematic un singur corp, raportul de transmitere fiind, deci, egal cu unitatea (se obŃine treapta 12 == aa ii ). În acest caz, puterea ajunge la arborele de ieşire prin două fluxuri
de putere (fig. 4.3., a), micşorându-se, astfel, momentul de calcul al ambreiajului A.

47
Fig. 4.2. Scheme cinematice ale amplificatoarelor de cuplu: a, b, c – planetare; d, e – neplanetre.
Fig. 4.3. Amplificator de cuplu planetar cu cuplaj unisens: a - schema cinematică şi circuitul puterii, ambreiaj cuplat; b - scheme de calcul; c - schema cinematică şi circuitul puterii, ambreiaj decuplat.

48
Pentru determinarea momentului de calcul a ambreiajului, se foloseşte metoda izolării
de legături şi a punerii forŃelor şi momentelor de legătură (fig. 4.3., b). Din ecuaŃia de
momente a satelitului dublu, rezultă: .2123 rTrT =′
Înlocuind forŃele tangenŃiale T1 şi T3 cu momentele corespunzătoare, se obŃine:
,21
12
3
3 rr
Mr
r
M=′
de unde
,3
3
2
2
13
3
2
2
131 K
M
z
z
z
zM
r
r
r
rMM =
′=
′=
unde .2
3
1
2
z
z
z
zK
′=
Întrucât, în cazul analizat, raportul de transmitere al amplificatorului de cuplu este egal
cu unu, momentele de torsiune la arborii conducător şi condus sunt egale (în valori absolute):
M3 = Me.
Prin urmare, .1 KMM e=
Din bilanŃul momentelor la arborele de intrare, rezultă ,1 Ae MMM +=
de unde se obŃine momentul MA, transmis prin ambreiajul amplificatorului:
.11
11 K
KM
KMMMM eeeA
−=
−=−=
Ambreiajul amplificatorului de cuplu se va calcula la momentul M = βMA, unde β este coeficient de siguranŃă al ambreiajului.
Când ambreiajul A este decuplat, datorită diferenŃei dintre momentul rezistent (Mrez =
M3>Me) şi momentul motor Me, braŃul portsatelit tinde să se rotească în sens contrar arborelui
de intrare (în fig. 4.3., b, braŃul H este rotit, în sensul menŃionat, de forŃa TH). Această tendinŃă
de rotire se anihilează însă prin blocarea elementului H cu carcasa, realizată de cuplajul
unisens C. În acest fel, mecanismul planetar se transformă într-un reductor cu axe fixe, format
din două perechi de roŃi, 1 - 2 şi 2´- 3, cu raportul de transmitere
.12
3
1
21 >
′==
z
z
z
zii aa
Aşadar, construcŃia prezentată permite obŃinerea a două rapoarte de transmitere: ia1>1
şi ia2 = 1. Circuitul puterii, în cazul ia>1, este prezentat în figura 4.3, c. Aceeaşi schemă este
folosită pentru determinarea momentului de calcul a cuplajului unisens. În acest scop,
amplificatorul, în întregime, este izolat ca sistem şi se aplică momentele de legătură: Me, care
reprezintă acŃiunea arborelui ambreiajului principal; M3, care reprezintă acŃiunea arborelui
primar al cutiei de viteze (este un moment rezistent) şi MC – moment reactiv, care apare în
legătura cuplaj unisens – carcasă. Momentul MC se determină din ecuaŃia momentelor
exterioare ale sistemului izolat: ( ).10 33 −=−=−=⇒=+− KMMKMMMMMMM eeeeCCe

49
În mod normal, ambreiajul de blocare A este cuplat. La creşterea temporară a forŃelor
de rezistenŃă, spre deosebire de construcŃiile obişnuite, nu este nevoie de schimbarea treptelor
din cutia de viteze, ci este suficient să se decupleze ambreiajul A. În acest fel, raportul de
transmitere se măreşte şi în mod corespunzător creşte şi momentul la roŃile motoare, ceea ce
ajută la învingerea rezistenŃelor suplimentare. Când aceste rezistenŃe dispar, se cuplează
ambreiajul A. Întrucât în acest mecanism se foloseşte un ambreiaj cu frecare uscată, acesta nu
este apt pentru o funcŃionare îndelungată în stare decuplată. De aceea, folosirea acestui
subansamblu ca reductor pentru obŃinerea a două game de viteze nu este raŃională. Mai trebuie
menŃionat că, la treapta înceată, din cauza cuplajului unisens, tractorul nu poate funcŃiona în
regim de frânare cu motorul.
U4.3.2 Amplificatoare de cuplu neplanetare
În schema din figura 4.2., d, între arborele 1 al ambreiajului principal şi arborele
primar 2 al cutiei de viteze se află montat ambreiajul A al amplificatorului de cuplu. Dacă
acest ambreiaj este decuplat, mişcarea se transmite de la arborele 1 la arborele 2, prin
intermediul angrenajelor 3 – 4, 6 – 7 şi al cuplajului unisens C, care uneşte roata 4 cu arborele
5. Dacă ambreiajul A se cuplează, arborele 5 se roteşte mai repede în comparaŃie cu roata 4,
din care cauză cuplajul unisens “se decuplează ”. În felul acesta, se obŃin două rapoarte de transmitere: ia2 = 1 (când A este cuplat) şi i z z z za1 4 3 7 6 1= ⋅ > (când A este decuplat).
La unele tractoare se folosesc amplificatoare de cuplu cu două ambreiaje multidisc, cu
funcŃionare în ulei (fig. 4.2., e). Dacă ambreiajul A2 este cuplat şi A1 decuplat, mişcarea între
arborii 1 şi 2 se transmite cu raportul ia2 = 1. Dacă, însă, A1 este cuplat şi A2 decuplat, raportul de transmitere devine i z z z za1 4 3 6 5 1= ⋅ > .
Indiferent de tipul amplificatorului, în majoritatea cazurilor raportul ia1 = 1,23…1,35.
O asemenea valoare a acestui raport permite învingerea majorităŃii rezistenŃelor suplimentare,
întâlnite în exploatarea tractoarelor agricole, prin trecerea la treapta inferioară a
amplificatorului de cuplu.
La unele construcŃii, ia1 = 1,5…1,6. În acest caz, folosirea amplificatorului de cuplu
pentru învingerea rezistenŃelor suplimentare temporare este însoŃită, de obicei, de reducerea
productivităŃii, deoarece avantajele schimbării din mers nu compensează reducerea exagerată
a vitezei. Amplificatoarele de cuplu cu valori mai mari ale lui ia1 sunt mai eficiente pentru
demarajul în trepte.

50
Tabelul 4.1 RelaŃii pentru calculul amplificatoarelor de cuplu planetare
RelaŃii de calcul Schema Treapta
Elementul
de acŃionat Cinematice Dinamice
I A – decuplat ( ωH=0, datorită cuplajului unisens C)
i Kz
z
z
za12
1
3
2
1= = ⋅′
> M M M M Ke1 3 1= =; ;
( )11 −= KMM C Fig.4.2,a
Fig.4.3.
a II-a A – cuplat ia2 1= MM
KM M
K
Ke
A e1
1= =
−; ;
M M e3 =
I A – decuplat
f – strânsă i
K
KK
z
za11
3
11=
+> =;
M M M MK
Ke H1 1
1= =
+; ;
M MM
Kf31= =
Fig.4.2,b
a II-a A – cuplat
f – liberă ia2 1=
M M MM
Ke a11= =; ;
M MH = 1
I A – decuplat
f – strânsă i K
z
z
z
za12
1
3
2
1= = ⋅′
> M M M M Ke1 3 1= =; ;
( )M M Kf = −1 1 Fig.4.2,c*
a II-a A – cuplat
f – liberă ia2 1= M
M
KM M
K
Ke
A e1
1= =
−; ;
M M e3 =
* Dacă A şi f sunt decuplate concomitent, ω3 = 0, din cauza momentului rezistent. În această
situaŃie, ( )ω ω ωH f e K= = −1 şi are valori foarte mari, întrucât K are valori apropiate de unu. De
aceea, sistemul de comandă trebuie să excludă situaŃia menŃionată.
Să ne reamintim...
• Amplificatoarele de cuplu sunt subansambluri obŃionale care au
următoarele caracteristici tehnice generale:
- se montează între ambreiajul principal şi cutia de viteze; - au două rapoarte de transmitere: 11 >= aa ii şi ;12 == aa ii
- trecerea de la un raport de transmitere la celălalt se face fără
întreruperea fluxului de putere;
- treapta principală de lucru (cuplată în mod obişnuit) este treapta ia2
= 1 (la această treaptă randamentul amplificatorului de cuplu este
maxim, apropiat de unu). Treapta ia1 > 1 se foloseşte numai pentru
depăşirea unor obstacole temporare.

51
• Amplificatoarele de cuplu pot fi:
- amplificatoare de cuplu planetare: a) cu cuplaj unisens, b) fără
cuplaj unisens;
- amplificatoare de cuplu neplanetare: a) cu cuplaj unisens, b) fără
cuplaj unisens.
U4.4. Rezumat
În cadrul acestei unităŃi de învăŃare sunt prezentate rolul, clasificarea, scheme
şi detalii funcŃionale ale amplificatoarelor de cuplu utilizate în transmisiile mecanice
ale tractoarelor. De asemenea sunt tratate şi elemente de calcul ale componentelor
amplificatoarelor de cuplu.
U4.5. Test de autoevaluare a cunoştinŃelor
1. Figura de mai jos reprezintă schema unui amplificator de cuplu.
Se cere:
a) Tipul amplificatorului;
b) RelaŃiile de calcul pentru cele două rapoarte de transmitere.
2. Figura de mai jos reprezintă schema unui amplificator de cuplu. Se
cunosc numerele de dinŃi ale roŃilor dinŃate 3,4,5 şi 6 (z3= z5=20, z4=
z6=23).
Se cere:
a) Tipul amplificatorului;
b) Valoarea celor două rapoarte de transmitere ale mecanismului.

52
3. Pentru amplificatorul de cuplu din figura de mai jos se cunosc: z1=72;
raportul de transmitere ia1=1,33, valoarea momentului Me=200 Nm.
Se cere să se calculeze:
a) numerele de dinŃi z3 al roŃii planetare şi z2 al sateliŃilor;
b) valoarea momentului MH când ambreiajul A este cuplat;
c) valoarea momentului MH când ambreiajul A este decuplat.
Răspunsuri:
1) a) planetar cu cuplaj unisens; b) vezi talelul 4.1, fig. 4.2; 2) a) neplanetare, fără cuplaj unisens; b) 3225,156341 =⋅= zzzzia ; ia2 = 1;
3) a) z3= z2=24; b) MH= Me=200 Nm; c) MH= ia1·Me=266 Nm.

53
Unitatea de învăŃare 5. ParticularităŃi funcŃionale şi constructive ale cutiilor de viteze pentru tractoare
Cuprins
U5.1. Introducere ...........................................................................................................53
U5.2. CompetenŃe ..........................................................................................................53
U5.3. Cutii de viteze compuse.......................................................................................54
U5.4. Cutii de viteze cu schimbarea treptelor sub sarcină.............................................57
U5.5. Rezumat ...............................................................................................................61
U5.6. Test de evaluare a cunoştinŃelor ......................................................................... 61
U5.1. Introducere
Cutia de viteze este necesară pentru: modificarea momentului de torsiune
la roŃile motoare şi, respectiv, a vitezei de deplasare a tractorului (care se
realizează prin modificarea raportului total de transmitere), adaptând astfel
tractorul la condiŃiile de lucru; obŃinerea mersului înapoi al tractorului; staŃionarea
îndelungată a tractorului cu motorul în funcŃionare.
Cutia de viteze trebuie să îndeplinească următoarele condiŃii: să asigure un
număr suficient de trepte de viteze, cu rapoarte de transmitere alese raŃional; să
asigure funcŃionarea tractorului cu o înaltă economicitate şi productivitate, într-o
gamă de viteze dată.
În afară de acestea, cutiei de viteze i se mai impun următoarele condiŃii:
construcŃie simplă şi tehnologică; greutate şi gabarit reduse; cuplare rapidă şi
uşoară; fiabilitate şi mentenabilitate ridicate.
U5.2. CompetenŃele unităŃii de învăŃare
După parcurgerea materialului acestei unităŃi de învăŃare studenŃii vor fi
capabili:
• să cunoască rolul cutiilor de viteze în transmisia tractoarelor, în special a cutiilor
cu cuplare sub sarcină;
• să cunoască necesitatea şi avantajele utilizării cutiilor cu cuplare sub sarcină;
• să cunoască principiul de funcŃionare a cutiilor de viteze cu cuplare sub sarcină
şi de schimbare a treptelor.
Durata medie de parcurgere a acestei unităŃi de învăŃare este de 2 ore.

54
U5.3. Cutii de viteze compuse
Cu scopul de a obŃine un număr mare de trepte de viteze cu un număr redus de roŃi dinŃate şi
cu arbori scurŃi, în construcŃia de tractoare s-a impus utilizarea cutiilor de viteze compuse.
Cutiile de viteze compuse sunt formate din două cutii de viteze legate în serie. Pentru
exemplificare, în figura 5.1 este prezentată schema cinematică a cutiei de viteze compuse a
tractorului U 650 M. Ea este formată din reductorul A şi cutia de viteze propriu-zisă B. Reductorul
A realizează două trepte (rapidă şi înceată), în timp ce cutia de viteze B, de tipul cu trei arbori,
realizează (5+1)trepte.
Fig. 5.1. Schema cinematică a cutiei de viteze, de tipul 2⋅(5+2) trepte, utilizată la tractoarele U 650 M şi U
651 M: A- reductor cu două trepte; B- cutie de viteze cu (5+1) trepte; R- treapta rapidă; Î- treapta înceată; 1 şi
3- roŃi centrale; 2 şi 2′- satelit dublu; H- braŃ portsatelit.
Această schemă permite obŃinerea a (10+2) trepte de viteze astfel: (5+1) trepte, prin
cuplarea reductorului în treapta înceată ( iz
z
z
zÎ= ⋅ =
′
2
1
3
2
1 482, ) şi alte (5+1) trepte, prin cuplarea
reductorului în treapta rapidă ( iR = 1).
În figura 5.2 este prezentată construcŃia unui asemenea reductor.
Plasarea reductorului în faŃa cutiei de viteze are dezavantajul că amplifică momentul de
torsiune la intrarea în cutie.

55
Fig. 5.2. Reductorul cutiei de viteze a tractoarelor U 650 M şi U 651 M.
În figura 5.3 sunt prezentate schemele cinematice (în două variante) ale cutiilor de viteze
compuse utilizate la tractoarele pe roŃi din familia U 445. Cutia de viteze A este de tipul cu doi
arbori, realizează (3+1) trepte, iar treptele II şi III sunt sincronizate. Reductorul B asigură două
trepte (game) de viteze, iar C – trei trepte de viteze.
Fig. 5.3. Schemele cinematice ale cutiilor de viteze utilizate la tractoarele din familia U 445: A - cutie de viteze cu (3+1) trepte; B - reductor cu două trepte; C - reductor cu trei trepte; 1, 1′, 3, 3′ - roŃi
centrale; 2 şi 2′ - sateliŃi; H şi H′ - braŃe portsatelit.
Fig. 5.4. Schemele cinematice ale cutiilor de viteze compuse utilizate la tractoarele din familia U 850 şi U 1010: A – cutie de viteze cu (4+1) trepte; B- reductor cu trei trepte; C – reductor cu patru trepte; 1, 1′, 1′′, 3,
3′, 3′′- roŃi centrale; 2, 2′, 2′′- sateliŃi; H, H′, H′′- braŃe portsatelit.

56
Tractoarele din familia U 850 şi U 1010 au cutii de viteze compuse cu (4+1)⋅3 trepte sau
(4+1)⋅4 trepte (cu reductorul B se obŃin trei game de viteze, iar cu C – patru game). În figura 5.4
este reprezentată schema cinematică a cutiei de viteze compuse cu (4+1)⋅3 trepte şi a reductorului
planetar cu 4 trepte. Treptele de mers înainte sunt toate sincronizate.
În figura 5.5 este reprezentată schema cinematică a unei cutii de viteze compuse, cu
inversor, utilizată de firma Renault, organizată după schema (1+1)⋅(4+1)⋅3. Cele patru trepte ale
cutiei de viteze 2 sunt sincronizate.
Fig. 5.5. Schema cinematică a unei cutii de viteze compuse de tipul (1+1)⋅(4+1)⋅3 (firma Renault): 1 – inversor; 2 - cutie de viteze cu 4 trepte (sincronizate); 3 – reductor cu 3 game.
Schema cinematică a cutiei de viteze compuse din figura 5.6 este de tipul 2⋅(1+1)⋅2⋅6. Cele
şase trepte ale cutiei de viteze 4 sunt sincronizate.
Fig. 5.6. Schema cinematică a unei cutii de viteze compuse de tipul 2⋅(1+1)⋅2⋅6: 1 – reductor; 2 – inversor; 3 – reductor cu 2 game; 4 – cutie de viteze cu 6 trepte (sincronizate).

57
În cazul cutiilor de viteze cu arbori transversali, inversarea sensului de mişcare se obŃine
uşor. Schema cinematică din figura 5.7 este a unei cutii de viteze cu (4+4) trepte.
Fig. 5.7. Schema cinematică a unei cutii de viteze cu arbori transversali, cu inversor
Arborele primar 1 (paralel cu axa longitudinală a tractorului) transmite mişcarea la arborele
transversal 2 prin inversorul A, format din două angrenaje conice. Inversarea sensului de rotaŃie se
realizează prin rigidizarea arborelui intermediar 2 cu una sau alta din roŃile conice care se rotesc
liber pe el. Rigidizarea se face cu ajutorul manşonului de cuplare 4. Treptele de viteze se obŃin prin
cuplarea roŃilor baladoare de pe arborele intermediar 2 cu roŃile corespunzătoare de pe arborele
secundar 3. De la arborele 3, momentul se transmite punŃii motoare prin roata 5. Aceste cutii de
viteze reduc gabaritul longitudinal al transmisiei şi simplifică construcŃia transmisiei centrale.
U5.4. Cutii de viteze cu schimbarea treptelor sub sarcină
În cazul cutiilor de viteze obişnuite (la care schimbarea treptelor de viteze se realizează cu
ajutorul roŃilor baladoare, al mufelor de cuplare sau al sincronizatoarelor), trecerea de la o treaptă la
alta este însoŃită de întreruperea fluxului de putere transmis roŃilor motoare. Această întrerupere
durează cel puŃin 1,5…2 s şi are drept urmare, mai ales în cazul lucrărilor grele, oprirea tractorului.
La o încărcare a tractorului de 85…90%, acesta poate porni din loc cu o viteză de maximum
1 … 1,5 m/s (3,6…5,4 km/h). Pentru a putea porni din loc cu o viteză de 2…3 m/s (7,2…10,8
km/h), trebuie redusă încărcarea motorului la 65…70%. Dacă însă, prin folosirea cutiilor de viteze
cu cuplare sub sarcină, se realizează pornirea tractorului la viteza de 1,4 m/s şi apoi, fără a întrerupe
fluxul de putere, se trece la viteza de lucru de 2…3 m/s, atunci, la aceeaşi încărcarea a tractorului,
puterea efectivă a motorului se reduce cu 15…25%. Totodată, prin folosirea cutiilor de viteze cu
cuplare sub sarcină, creşte productivitatea tractorului.
Transmisiile mecanice la care schimbarea treptelor se face fără întreruperea fluxului de
putere (adică din mers sub sarcină) se execută după una din variantele următoare:
- cutii de viteze cu amplificator de cuplu, montat în serie, care permite schimbarea vitezei
din mers sub sarcină la fiecare treaptă din cutia de viteze;
1
5
A
3
4
2

58
- cutii de viteze cu mai multe game la care, în interiorul gamei, treptele se schimbă fără
întreruperea fluxului de putere, iar schimbarea gamelor este însoŃită de oprirea tractorului;
- cutii de viteze la care toate treptele se schimbă fără întreruperea fluxului de putere.
În figura 5.8 este prezentată schema cinematică a unei cutii de viteze cu patru arbori, care
permite cuplarea treptelor de viteze din mers sub sarcină, în cadrul fiecărei game de viteze. Cutia de
viteze realizează 16 trepte pentru mersul înainte, grupate în patru game, şi opt viteze pentru mersul
înapoi, grupate în două game. Arborele primar 1 este unit printr-o flanşă direct cu arborele cotit al
motorului (nu mai este necesar ambreiaj principal în transmisie). Toate roŃile din cutia de viteze se
află în angrenare permanentă. Gamele de viteze se cuplează cu ajutorul mufelor de cuplare, când
toate ambreiajele sunt decuplate. Pentru cuplarea celor patru trepte din cadrul fiecărei game de
viteze, se folosesc ambreiajele A1, A2, A3 şi A4. Prin cuplarea ambreiajului treptei respective se
solidarizează roata conducătoare a angrenajului permanent corespunzător cu arborele primar.
Fig. 5.8 Schema cinematică a unei cutii de viteze cu cuplare sub sarcină cu (16+8) trepte:
A1, A2, A3, A4 – ambreiaje de cuplare; M1 – mufă de cuplare a treptelor de mers înapoi; M2 şi M3 – mufe de cuplare a treptelor de mers înainte; M4 – mufă de cuplare a punŃii din spate; 1 – arbore primar; 2, 3 – arbori
secundari.
În figura 5.9 este prezentat un detaliu al schemei cinematice a cutiei cu (16+8) trepte din
figura 5.8. Când are loc schimbarea treptelor de viteze, un ambreiaj se decuplează, iar al doilea se
cuplează. Pentru ca transmiterea puterii la roŃile motoare să nu se întrerupă, este necesar ca ambele
ambreiaje să funcŃioneze simultan un timp bine determinat (timp de forfecare). Timpul de forfecare
depinde de o serie de factori cum ar fi: presiunea uleiului în sistem, schema cutiei de viteze, regimul
de lucru etc.

59
În continuare se analizează schematic fenomenele legate de schimbarea treptelor de viteze la
trecerea de la o treaptă inferioară la cea superioară. Înainte de începerea schimbării treptei,
momentul se transmite doar prin ambreiajul A1. La începerea schimbării, momentul transmis de
ambreiajul A1 scade continuu, pentru ca la timpul t = t1 să devină zero (fig. 5.10).
Fig.5.11. Schema fluxurilor de putere la schimbarea treptelor
În ambreiajul care se cuplează (A2), momentul creşte continuu şi în punctul A (fig. 5.10) este
egal cu momentul rezistent Mr. În această perioadă ambele ambreiaje patinează, însă discurile lor
conduse, rotindu-se în acelaşi sens, antrenează împreună arborele condus (fig. 5.11, b): M i M i M r1 1 2 2+ = ,
unde i1 şi i2 sunt rapoarte de transmitere ale angrenajelor permanente luate în discuŃie.
În punctul A (v. fig. 5.10), momentul ambreiajului a crescut până la Mr şi începe demarajul tractorului sub influenŃa momentului suplimentar M i M r2 2 − . Demarajul începe de la viteza v1
(corespunzătoare treptei care se schimbă). În cazul demarajului cu ambreiajul principal, procesul
Fig. 5.9. Detaliu al cutiei de viteze cu (16+8) trepte: 1 – arbore primar; 2 –
arbore intermediar; A1 şi A2 - ambreiaje
Fig. 5.10. VariaŃia momentelor în ambreiajele de cuplare

60
demarării începea de la viteza v = 0 în fiecare treaptă. Acesta este un avantaj esenŃial al sistemului
analizat în comparaŃie cu sistemele la care demarajul se realizează cu ambreiaj principal.
Timpul optim al suprapunerii funcŃionării ambreiajelor A1 şi A2 este (fig.5.10): ∆t t toptim = −1 0 .
În situaŃia în care ∆ ∆t t t toptim= ′ − >1 0 , ambreiajul A1 continuă să fie cuplat parŃial (continuă
suprapunerea funcŃionării ambreiajelor). În aceste condiŃii, ambreiajul A1 împiedică demarajul
arborelui 2. Apare o circulaŃie a puterii în contur închis (v. fig. 5.11, d), fenomen cunoscut sub
denumirea de putere parazită.
Să ne reamintim...
• Cutia de viteze este necesară pentru:
- modificarea momentului de torsiune la roŃile motoare şi, respectiv, a vitezei
de deplasare a tractorului (care se realizează prin modificarea raportului total
de transmitere), adaptând astfel tractorul la condiŃiile de lucru;
- obŃinerea mersului înapoi al tractorului;
- staŃionarea îndelungată a tractorului cu motorul în funcŃionare.
• Cutia de viteze trebuie să îndeplinească următoarele condiŃii:
- să asigure un număr suficient de trepte de viteze, cu rapoarte de transmitere
alese raŃional;
- să asigure funcŃionarea tractorului cu o înaltă economicitate şi
productivitate, într-o gamă de viteze dată;
- construcŃie simplă şi tehnologică;
- greutate şi gabarit reduse;
- cuplare rapidă şi uşoară; fiabilitate şi mentenabilitate ridicate.
• Utilizarea cutiilor de viteze compuse s-a impus în construcŃia de tractoare cu
scopul de a obŃine un număr mare de trepte de viteze, cu un număr redus de roŃi
dinŃate şi cu arbori scurŃi.
• Cutiile de viteze compuse sunt formate din două sau mai multe cutii de viteze
înseriate.
• Cutiile de viteze cu cuplare sub sarcină permit schimbarea treptelor de viteze
fără întreruperea fluxului de putere (power shift).
• Prin utilizarea cutiilor de viteze cu cuplare sub sarcină, la aceeaşi încărcarea a
tractorului, puterea efectivă a motorului se reduce cu 15…25%.

61
U5.5. Rezumat
În cadrul acestei unităŃi de învăŃare au fost prezentate particularităŃi ale
cutiilor de viteze folosite în transmisia tractoarelor (cutii de viteze compuse şi cutii
de viteze cu cuplare sub sarcină).
Sunt prezentate exemple variate de scheme cinematice ale cutiilor de viteze
ale tractoarelor româneşti şi străine.
Sunt prezentate avantajele utilizării cutiilor de viteze cu cuplare sub sarcină.
Este explicat principiul de funcŃionare al cutiilor de viteze cu cuplare sub
sarcină, pornind de la schema cinematică a unui tractor echipat cu o astfel de cutie.
U5.6. Test de evaluare a cunoştinŃelor
1. De ce se utilizează cutiile de viteze compuse în transmisia tractoarelor?
2. Care sunt avantajele utilizării cutiilor de viteze cu cuplare sub sarcină?
3. Ce se înŃelege prin timp de forfecare?
4. Ce se întâmplă dacă valoarea timpului de forfecare este mai mare decât
valoarea optimă?
5. Pot fi considerate amplificatoarele de cuplu (v. unitatea de învăŃare U4) cutii
de viteze cu cuplare sub sarcină? JustificaŃi răspunsul.

62
Unitatea de învăŃare 6. ParticularităŃi funcŃionale, constructive şi de calcul ale diferenŃialelor tractoarelor
Cuprins
U6.1. Introducere ...........................................................................................................62
U6.2. CompetenŃe ..........................................................................................................62
U6.3. Rolul şi clasificarea diferenŃialelor ......................................................................63
U6.4. DiferenŃialul simplu simetric ...............................................................................64
U6.5. Regimul de calcul al diferenŃialului.....................................................................68
U6.6. DiferenŃiale autoblocabile cu discuri de fricŃiune................................................69
U6.6.1. Clasificarea diferenŃialelor autoblocabile cu discuri de fricŃiune...........69
U6.6.2. Determinarea momentelor de torsiune la cei doi arbori planetari, în cazul
diferenŃialelor cu frecare mărită. Coeficientul de blocare .....................70
U6.6.3. DiferenŃial autoblocabil cu frecare mărită al cărui moment de frecare
depinde de momentul transmis..............................................................72
U6.6.4. DiferenŃial autoblocabil cu frecare mărită al cărui moment de frecare nu
depinde de momentul transmis..............................................................74
U6.6.5. DiferenŃiale autoblocabile cu strângere mixtă a cuplajelor ....................75
U6.7. Rezumat...............................................................................................................78
U6.8. Test de evaluare a cunoştinŃelor..........................................................................79
U6.1. Introducere
În cadrul acestei unităŃi de învăŃare sunt tratate particularităŃile funcŃionale,
constructive şi de calcul ale diferenŃialelor utilizate la tractoare.
Se prezintă rolul şi clasificarea diferenŃialelor.
Pornind de la funcŃionarea diferenŃialului simplu, este demonstrată
necesitatea blocării diferenŃialelor în anumite condiŃii. Sunt prezentate scheme de
blocare a diferenŃialelor.
Sunt prezentate elemente de calcul a diferenŃialelor.
În ultima parte sunt prezentate elemente legate de funcŃionarea şi calculul a
mai multor variante de diferenŃiale autoblocabile cu discuri de fricŃiune.
U6.2. CompetenŃele unităŃii de învăŃare
După parcurgerea materialului acestei unităŃi de învăŃare studenŃii vor fi
capabili:
• să cunoască rolul, clasificarea diferenŃialelor;
• să identifice principiile de funcŃionare şi de blocare a diferenŃialelor pornind de
la schemele cinematice ale acestora;
• să determine regimul de calcul al diferenŃialelor;

63
• să recunoască caracteristicile funcŃionale ale ale diferitelor tipuri de diferenŃiale
cu discuri de fricŃiune.
Durata medie de parcurgere a acestei unităŃi de învăŃare este de 4 ore.
U6.3. Rolul şi clasificarea diferenŃialelor
DiferenŃialul este subansamblul transmisiei care se plasează între transmisia centrală şi
transmisia finală a tractoarelor pe roŃi, având rolul de a permite roŃilor motoare să se rotească cu
viteze unghiulare diferite. Această necesitate apare în următoarele situaŃii:
• când roŃile motoare ale aceleiaşi punŃi parcurg spaŃii neegale în acelaşi timp, proces ce
are loc la deplasarea tractorului în viraj sau pe drumuri cu denivelări;
• când razele de rulare ale roŃilor punŃii sunt diferite, ca urmare a inegalităŃii presiunii în
pneuri, a uzurii sau încărcării diferite a acestora.
DiferenŃialul elimină puterea parazită în puntea motoare, fenomen care ar apărea dacă roŃile
motoare ar fi montate pe un arbore comun. Prin urmare, datorită diferenŃialului, se reduc solicitările
şi pierderile mecanice în transmisie, se micşorează uzura pneurilor şi se ameliorează
manevrabilitatea tractorului.
DiferenŃialele tractoarelor pe roŃi pot fi clasificate după următoarele criterii:
a) După modul de repartizare a momentului de torsiune între cei doi arbori planetari:
• diferenŃiale simetrice, la care momentul de torsiune se repartizează în mod egal între
cei doi arbori planetari;
• diferenŃiale asimetrice, la care momentul de torsiune se repartizează diferit între cei
doi arbori planetari, însă într-un raport constant (se folosesc numai ca diferenŃialele
interaxiale);
• diferenŃiale autoblocabile, la care momentul de torsiune se repartizează între cei doi
arbori planetari într-un raport variabil, care depinde de condiŃiile de lucru şi de
deplasare ale tractorului.
b) După locul de plasare în transmisie:
• diferenŃiale dispuse între roŃile aceleiaşi punŃi;
• diferenŃialele interaxiale, dispuse între punŃile motoare ale tractorului cu patru roŃi
motoare.
c) După construcŃie:
• cu angrenaje conice;
• cu angrenaje cilindrice;
• cu angrenaje melcate;
• cu came şi tacheŃi.

64
d) După principiul de funcŃionare:
• simple;
• cu blocare facultativă;
• autoblocabile.
Există, aşadar, o mare diversitate de diferenŃiale. Pentru a elimina însă paralelismul cu alte
discipline, în acest capitol se tratează numai diferenŃialele specifice tractoarelor pe roŃi. Se prezintă,
astfel, diferenŃialele cu blocare facultativă şi diferenŃialele cu autoblocare cu discuri de fricŃiune,
acestea având cea mai mare utilizare la tractoare.
U6.4. DiferenŃialul simplu simetric
Cu ajutorul schemei din figura 6.1 se demonstrează necesitatea blocării diferenŃialului la
tractoare. RoŃile planetare şi sateliŃii au fost izolate de legături şi s-au introdus forŃele şi momentele
de legătură.
Fig. 6.1. Schema forŃelor şi a momentelor care acŃionează asupra roŃilor diferenŃialului.
Din condiŃiile de echilibru ale satelitului, rezultă:
.2;; 121121121 TTTTrTrTTTT ==⇒==+
Din ecuaŃiile de momente ale celor doi arbori planetari, se obŃine:
M T r1 1 1= şi
M T r2 2 1= .
Rezultă, aşadar, următoarea relaŃie evidentă:
.21 MM = (6.1)
Prin urmare, dacă într-un diferenŃial sunt neglijate momentele de frecare, atunci momentele
de torsiune ale celor doi arbori planetari sunt egale. Dacă la una din roŃile motoare (de exemplu, la
roata din stânga) aderenŃa cu solul este foarte scăzută, momentul M1 ≈ 0. În baza relaŃiei (6.1),
rezultă că şi M2 ≈ 0. Deci, calităŃile de tracŃiune ale tractorului sunt limitate de roata cu aderenŃa
cea mai scăzută.

65
Din bilanŃul momentelor exterioare ale diferenŃialului, rezultă
.0 21 ≈+= MMM d
Se analizează, în continuare, un alt caz particular. Se consideră sarcinile radiale, pe roŃile unei punŃi motoare, egale:
.QQQ dreaptastânga ==
CoeficienŃii de aderenŃă sunt însă diferiŃi: la roata din stânga ϕ1 = 0,7, iar roata din dreapta
ϕ2 = 0,3. Momentul de torsiune la arborele planetar din dreapta va fi:
,22
ffi
rQM
ηϕ
=
în care: r este raza dinamică a roŃilor motoare;
if - raportul de transmitere al transmisiei finale;
ηf - randamentul transmisiei finale.
În baza relaŃiei (1), M1 = M2 şi, prin urmare,
⋅==+=ffff
d i
Qr
i
QrMMM
ηηϕ 6,02 221 (6.2)
Prin urmare, forŃa motoare a tractorului este egală cu dublul forŃei motoare realizată de
roata cu aderenŃa minimă.
Dacă cei doi arbori planetari sunt legaŃi rigid, momentul de torsiune la carcasa
diferenŃialului va fi dat de relaŃia:
⋅=+=+=+=ffffff
d i
Qr
i
Qr
i
QrMMM
ηηηϕϕ )3,07,0()( 2121 (6.3)
Comparând relaŃiile (6.2) şi (6.3), rezultă avantajele exploatării tractorului cu diferenŃialul
blocat când roŃile acestuia se află în condiŃii de aderenŃă diferite.
În prezent, la toate tractoarele se utilizează diferenŃiale cu blocare facultativă sau
autoblocabile.
În continuare, sunt prezentate câteva scheme de blocare facultativă a diferenŃialului. În toate
cazurile se foloseşte acelaşi principiu, şi anume se unesc rigid cei doi arbori planetari, anulându-se
concomitent mişcarea relativă a sateliŃilor.
În figura 6.2 este dată schema de blocare utilizată frecvent la autocamioane şi la unele
tractoare. Rigidizarea celor doi arbori planetari se realizează cu un cuplaj mobil dinŃat (dantură
exterioară la carcasa diferenŃialului şi interioară – la manşon). Prin deplasarea axială a manşonului,
se uneşte unul din arborii planetari cu carcasa.

66
Fig. 6.2. Schema de blocare a diferenŃialului cu manşon dinŃat.
În schema din figura 6.3 este reprezentată blocarea facultativă cu ajutorul unui manşon cu
ştifturi. Prin deplasarea axială a acestuia, se uneşte rigid carcasa diferenŃialului cu una din roŃile
planetare. După încetarea forŃei exterioare de blocare, diferenŃialul se autodeblochează cu ajutorul
unui arc. Acest sistem de deblocare se utilizează, de exemplu, la familiile de tractoare româneşti U
445, U 850, U 1010.
Fig. 6.3. Schema de blocare a diferenŃialului cu manşon cu ştifturi.
Fig. 6.4. ConstrucŃia diferenŃialului tractorului U 445.

67
În figura 6.4. este reprezentată construcŃia unui diferenŃial care utilizează schema din figura 6.3.
Fig. 6.5. Schema de blocare a diferenŃialului cu cuplaj cu craboŃi.
La unele tractoare (de ex. U 650), se utilizează blocarea facultativă a diferenŃialului cu
ajutorul unui cuplaj cu dantură frontală (craboŃi). Prin deplasarea unui semicuplaj (fig. 6.5), se
rigidizează arborii roŃilor motoare şi, prin intermediul transmisiilor finale, se unesc rigid şi arborii
planetari. Şi în acest caz diferenŃialul se autodeblochează cu ajutorul unui arc.
O altă soluŃie de blocare facultativă a diferenŃialului este dată în figura 6.6, unde pentru
blocare se utilizează un cuplaj cu suprafeŃe de frecare conice. În acest caz, legătura dintre roŃile
motoare nu mai este rigidă, cuplajul de blocare îndeplinind şi funcŃia unui cuplaj de siguranŃă.
Fig. 6.6. Schema de blocare a diferenŃialului cu cuplaj conic de fricŃiune.
Fig. 6.7. Schema de blocare a diferenŃialului cu ambreiaje cu discuri.
Mai recent, se utilizează frecvent pentru blocare ambreiaje cu discuri comandate hidrostatic
(fig. 6.7).

68
Pentru puntea motoare din faŃă, mai ales, la tractoarele de putere mică şi mijlocie, se
utilizează diferenŃiale fără blocare.
U6.5. Regimul de calcul al diferenŃialului
Pentru calculul elementelor componente ale diferenŃialului, trebuie, mai întâi, să se
determine momentele de calcul corespunzătoare.
Momentul de calcul Md la carcasa diferenŃialului se calculează comparând momentul Mcm,
transmis de motor, cu cel din condiŃia de aderenŃă Mcϕ :
• pentru diferenŃialul punŃii din spate:
( ).,min;; 222
2222 ϕϕ η
ϕηη ccmd
ffccccvcvncm MMM
i
rGMiiMM ===
• pentru diferenŃialul punŃii din faŃă:
( ).,min;; 111
1111 ϕϕ η
ϕηηη ccmd
ffcccrrcvcvncm MMM
i
rGMiiiMM ===
în care: Mn este momentul nominal al motorului;
icv - raportul de transmitere al cutiei de viteze (se adoptă raportul de transmitere al
cutiei de viteze compuse pentru treapta I);
ir - raportul de transmitere al reductorului lateral;
ic1, ic2 - raportul de transmitere al transmisiei centrale din faŃă şi, respectiv, din spate;
if1, if2 - raportul de transmitere al transmisiei finale din faŃă şi, respectiv, din spate;
ηcv - randamentul cutiei de viteze;
ηr - randamentul reductorului lateral;
ηc1, ηc2 - randamentul transmisiei centrale din faŃă şi, respectiv, din spate;
ηf1, ηf2 - randamentul transmisiei finale din faŃă şi, respectiv, din spate;
G1, G2 - greutatea repartizată pe puntea din faŃă şi, respectiv, din spate;
r1, r2 - raza dinamică a roŃilor din faŃă, şi, respectiv, din spate;
ϕ - coeficientul de aderenŃă (se adoptă ϕ = 0,8).
Momentul de calcul pentru arborii planetari se calculează cu următoarele relaŃii:
• pentru puntea din faŃă:
( ) .,min;;1 1
11
11
1
11 ϕϕ η
ϕλ
λccmp
ffcdcm MMM
i
rQMMM ==
+=
• pentru puntea din spate:
în care:
Q1, Q2 sunt sarcinile radiale pe o roată din faŃă şi, respectiv, din spate (dacă nu sunt date
suficiente pentru calculul acestor sarcini, atunci forŃele Q1 şi Q2 se adoptă egale cu
capacitatea maximă de încărcare a pneurilor);
( ) .,min;;1 2
22
22
2
22 ϕϕ η
ϕλ
λccmp
ffcdcm MMM
i
rQMMM ==
+=

69
λ1, λ2 − coeficienŃii de blocare ai diferenŃialelor respective:
• λ1,2 = 1,15...1,2 pentru diferenŃiale neblocabile cu angrenaje conice;
• λ1,2 = 3...9 pentru diferenŃiale autoblocabile (se recomandă valorile
λ1,2 = 3...5);
• λ1,2 = ∞ pentru diferenŃiale cu blocare facultativă.
Momentul de calcul pentru angrenajul satelit – roată planetară se stabileşte luând în
considerare numărul sateliŃilor ns ai diferenŃialului :
MM
n
z
zp
s
s
p1
1
1
= ⋅ sau, respectiv, MM
n
z
zp
s
s
p2
2
2
= ⋅
în care: zp este numărul de dinŃi ai roŃii planetare;
zs - numărul de dinŃi ai satelitului.
Cu ajutorul raportului zs /zp momentul de calcul se reduce la roata mică a angrenajului (la
pinion), care, de regulă, este satelitul. Pentru ca montajul diferenŃialului să fie posibil, trebuie
respectată condiŃia de montaj a diferenŃialului, şi anume: numărul de dinŃi ai roŃii planetare trebuie
să fie divizibil cu numărul sateliŃilor. La proiectarea angrenajelor sateliŃi – roŃi planetare trebuie
respectate următoarele condiŃii suplimentare: lăŃimea danturii b = (0,3…0,4)L, unde L este
generatoarea conului de divizare, iar coeficientul modular al danturii conice Ψm = b/mn med =
5,0…5,5. Pentru executarea roŃilor dinŃate ale diferenŃialului, se folosesc oŃeluri aliate de cementare:
13 CrNi 30, 18 CrNi 30, 28 Ti MnCr 12, 21 TiMnCr 12, 20 MoCrNi 06. Adâncimea stratului
cementat se află între limitele 0,8…1,5 mm. În urma tratamentului termic, suprafeŃele dinŃilor au
duritatea 56…63 HRC. RezistenŃa admisibilă la încovoiere a danturii sateliŃilor şi roŃilor planetare
se adoptă σai = 300…400 MPa, iar rezistenŃa admisibilă la strivire a suprafeŃelor de sprijin ale
sateliŃilor şi roŃilor planetare pe carcasa diferenŃialului σas = 70 MPa.
Osiile sateliŃilor (după caz, crucea sateliŃilor) se execută din oŃeluri aliate de cementare de
tipul 15 Cr 08, 13 CrNi 30, 21 TiMnCr 12 a căror duritate după tratamentul termic trebuie să fie de
50…60 HRC. RezistenŃa admisibilă la strivire a osiilor sateliŃilor se adoptă σas = 70 MPa, iar la
forfecare τaf = 80…90 MPa.
Pentru determinarea momentului de calcul la oboseală, trebuie avută în vedere metodica din
unitatea de învâŃare U2. De exemplu, la alegerea rulmenŃilor se adoptă în calcule sarcina medie
corespunzătoare mersului în linie dreaptă cu diferenŃialul neblocat. Determinarea sarcinii
echivalente medii se face comparând pentru fiecare treaptă de viteze valorile momentelor Mcm cu
Mcϕ şi adoptând de fiecare dată valoarea mai mică.
U 6.6. DiferenŃiale autoblocabile cu discuri de fricŃiune
U 6.6.1 Clasificarea diferenŃialelor autoblocabile cu discuri de fricŃiune
Calitatea oricărui tip de diferenŃial cu frecare mărită este asigurată în măsura în care
îndeplineşte următoarele cerinŃe:
• posibilitatea rotirii cu turaŃii diferite a roŃilor motoare pe terenuri accidentate şi în timpul
virajului;

70
• asigurarea unei creşteri substanŃiale a forŃei de tracŃiune a tractorului;
• asigurarea unei bune manevrabilităŃi a tractorului;
• siguranŃă şi durabilitate în funcŃionare;
• posibilitatea de utilizare, fără modificări constructive importante, în punŃile motoare ale
tractorului.
DiferenŃialele cu frecare mărită cu discuri de fricŃiune pot fi realizate în mai multe variante
constructive, particularitatea fiecărei variante constituind-o modul de generare a forŃelor axiale de
strângere a cuplajelor cu discuri. Din acest punct de vedere se deosebesc următoarele trei variante:
I. DiferenŃiale la care forŃa de strângere a cuplajelor de fricŃiune depinde de momentul
transmis (momentul de frecare Mf depinde de momentul transmis Md de la carcasa
diferenŃialului: Mf = f(Md)).
II. DiferenŃiale la care forŃa de strângere a cuplajelor de fricŃiune nu depinde de
momentul transmis (momentul de frecare Mf ≠ const.).
DiferenŃiale cu strângere mixtă a cuplajelor de fricŃiune.
U6.6.2 Determinarea momentelor de torsiune la cei doi arbori planetari, în cazul
diferenŃialelor cu frecare mărită. Coeficientul de blocare
În cazul în care ω1>ω2 (roata motoare legată de arborele planetar 1 patinează sau tractorul se
deplasează în viraj), între cei doi arbori planetari apare o mişcare relativă şi, în consecinŃă, între
suprafeŃele discurilor din fiecare cuplaj ia naştere un moment de frecare Mf . Acesta se va opune
rotirii arborelui cu turaŃie mai mare şi va ajuta rotirea roŃii cu turaŃie scăzută.
Pentru determinarea momentelor de torsiune la cei doi arbori planetari, se izolează de
legături arborii planetari 1 şi 2 şi se pun momentele de legătură (fig. 6.9): Md/2, M1, M2 şi Mf. Pentru
aceste momente, s-a ales sensul după cum urmează:
- momentele Md/2 au sensul vitezei unghiulare ωd , fiind momente motoare;
- momentele M1 şi M2 au sens opus vitezelor unghiulare corespunzătoare, ω1 şi ω2, fiind
momente rezistente;
- momentul de frecare Mf , din fiecare cuplaj, are sens opus vitezei unghiulare relative ∆ω.
Fig. 6.8. Schema de principiu a unui diferenŃial cu frecare mărită, cu cuplaje de fricŃiune.

71
Fig. 6.9. Scheme pentru calculul momentelor de torsiune ale arborilor planetari.
Momentele de torsiune M1 şi M2 se obŃin din ecuaŃiile de echilibru ale arborilor
corespunzători:
.2
02
,2
02
22
11
fd
fd
fd
fd
MM
MMMM
MM
MMMM
+=⇒=+−
−=⇒=−− (6.4)
Aceleaşi relaŃii se obŃin din ecuaŃia bilanŃului de putere al diferenŃialului cu frecare mărită
(pentru ω1>ω2):
fd PPPP ++= 21 .
în care:
Pd este puterea transmisă de carcasa diferenŃialului;
P1, P2 - puterea transmisă arborilor planetari;
Pf - puterea consumată prin frecare.
Puterea consumată prin frecare într-un cuplaj de fricŃiune este egală cu momentul de frecare
Mf înmulŃită cu viteza unghiulară relativă corespunzătoare ∆ω. Prin urmare, ( ) ( ).212121 ωωωωωωωω −=−+−=∆+∆= fddffff MMMMP
Înlocuind puterile în funcŃie de momentele şi vitezele unghiulare corespunzătoare, se obŃine:
)(2 212211
21 ωωωωωω
−++=+
fd MMMM
sau ( ) )(222 21221121 ωωωωωω −++=+ fd MMMM .
Se grupează termenii, astfel:
( ) ( ) .02222 2211 =+−+−− fdfd MMMMMM ωω
Întrucât 01 ≠ω şi ,02 ≠ω ultima ecuaŃie este satisfăcută numai dacă parantezele sunt
simultan egale cu zero:
.5,0022
,5,0022
22
11
fdfd
fdfd
MMMMMM
MMMMMM
+=⇒=+−
−=⇒=−−
Coeficientul de blocare al diferenŃialului este definit prin raportul:
.1max1
2 >
=
M
Mλ (6.5)

72
Aşadar, coeficientul de blocare al diferenŃialului se defineşte prin raportul valorilor, maximă
şi minimă, a momentelor de torsiune, care acŃionează simultan asupra celor doi arbori planetari. Cu
ajutorul acestui coeficient se apreciază calităŃile de blocare ale unui diferenŃial cu frecare mărită.
Folosind relaŃiile (6.4) şi (6.5), se obŃine expresia coeficientului de blocare pentru
diferenŃialul autoblocabil cu frecare mărită:
.2
2
fd
fd
MM
MM
−
+=λ (6.6)
U6.6.3 DiferenŃial autoblocabil cu frecare mărită al cărui moment de frecare depinde
de momentul transmis
În figura 6.10 este prezentată schema unui diferenŃial autoblocabil cu frecare mărită al cărui
moment de frecare depinde de momentul transmis (varianta I).
Fig. 6.10. Schema diferenŃialului autoblocabil, varianta I.
Crucea sateliŃilor a fost înlocuită cu două bolŃuri încrucişate la 90° care pot avea o deplasare
relativă. Carcasa diferenŃialului antrenează, prin caneluri, discurile de presiune 3, care, la rândul lor,
acŃionează asupra axului sateliŃilor cu forŃele normale N pe suprafeŃele de contact. Aceste forŃe se
descompun după două direcŃii în componentele: T/2 - tangenŃiale şi Q - axiale.
ForŃa tangenŃială totală T se determină din relaŃia:
⋅=R
MT d
Aşa cum rezultă din schema menŃionată, datorită suprafeŃei înclinate ia naştere forŃa axială Q:
.ctg2
ctg2
ββR
MTQ d==
ForŃa axială Q apasă asupra cuplajului de fricŃiune, dând naştere momentului de frecare Mf :
βµ
µ ctg2 R
riMriQM mdmf == .
Ultima relaŃie se poate scrie sub forma următoare:
⋅=2
df
MAM (6.7)
unde ⋅=R
riA m βµ ctg

73
În aceste relaŃii
i este numărul perechilor suprafeŃelor de frecare dintr-un cuplaj;
µ − coeficientul de frecare între discurile de fricŃiune;
rm − raza medie a suprafeŃelor de frecare.
SemnificaŃia celorlalte mărimi rezultă din figura 12.
În baza expresiilor (6.4), (6.6) şi (6.7), se obŃin următoarele relaŃii pentru momentele de
torsiune M1, M2 şi coeficientul de blocare λ:
( )
( )
.1
1
,122
,122
1
2
2
1
constA
A
M
Mλ
AM
MM
M
AM
MM
M
df
d
df
d
=−+
==
+=+=
−=−=
(6.8)
În unele construcŃii, forŃa axială Fa din angrenajul satelit – roată planetară apasă, de
asemenea, asupra cuplajului de fricŃiune. Prin urmare, forŃa axială totală va fi:
,sintg2
ϕαr
MQFQQ d
at +=+=
în care: α este unghiul de angrenare;
ϕ - semiunghiul conului de divizare.
Diagrama de blocare a diferenŃialului, varianta I. Pentru a construi această diagramă se
foloseşte construcŃia geometrică din figura 6.11. Din punctul x = a se duce o perpendiculară (NT)
pe bisectoarea unghiului drept xOy. Coordonatele unui punct M, luat pe această perpendiculară, se bucură de proprietatea .constayx ==+
Din aceeaşi figură rezultă relaŃia (care este, de fapt, o proprietate a triunghiului isoscel): [ ] .2aOA =
Fig. 6.11. ConstrucŃie geometrică care stă la baza diagramei de blocare.
Folosind ultimele două relaŃii, se construieşte diagrama de blocare din figura 6.12.
Mărimile folosite în această diagramă au următoarea semnificaŃie:
Md este valoarea curentă a momentului de torsiune la carcasa diferenŃialului;
Md max - momentul maxim la carcasa diferenŃialului (momentul minim dintre momentul
transmis de motor şi cel din condiŃia de aderenŃă);
Mf - momentul de frecare dintr-un cuplaj de fricŃiune (v. relaŃia 6.7).

74
Fig. 6.12. Diagrama de blocare a diferenŃialului, varianta I.
Dacă funcŃionarea este caracterizată printr-un punct situat in domeniul de blocare (în zona
haşurată), între cei doi arbori planetari nu poate exista o mişcare relativă. Pentru ca arborii planetari
să se poată roti cu turaŃii diferite, trebuie ca diferenŃa dintre momentele de torsiune ale acestor
arbori să depăşească momentul total de frecare, 2Mf, al diferenŃialului.
U6.6.4 DiferenŃial autoblocabil cu frecare mărită al cărui moment de frecare nu
depinde de momentul transmis
În figura 6.13. este prezentată schema unui diferenŃial autoblocabil cu frecare mărită al cărui
moment de frecare nu depinde de momentul transmis (varianta a II-a). Pentru o prezentare intuitivă
a fenomenului, în această schemă forŃa de apăsare este realizată de arcuri elicoidale cilindrice. În
realitate, în cuplajele de fricŃiune se montează arcuri – disc.
În fiecare cuplaj acŃionează o forŃă de apăsare constantă Q´. Folosind aceleaşi notaŃii, ca în
cazul precedent, se determină momentul de frecare din fiecare cuplaj: .constBrQiM mf ==′= µ (6.9)
Fig. 6.13. Schema diferenŃialului autoblocabil, varianta a II-a.

75
Prin urmare, în cazul acestei variante, se obŃin următoarele relaŃii pentru momentele de
torsiune M1, M2 şi coeficientul de blocare λ:
,221 B
MM
MM d
fd −=−=
,222 B
MM
MM d
fd +=+= (6.10)
.)(2
2
1
2 constMfBM
BM
M
Md
d
d ≠=−+
==λ
Folosind aceeaşi metodă, se construieşte diagrama de blocare pentru această variantă a
diferenŃialului autoblocabil (fig. 6.14).
Fig. 6.14. Diagrama de blocare a diferenŃialului, varianta a II-a.
U6.6.5 DiferenŃiale autoblocabile cu strângere mixtă a cuplajelor de fricŃiune
În figura 6.15 este prezentată schema unui diferenŃial autoblocabil cu strângere mixtă a
cuplajelor cu fricŃiune (Lok-O-Matic). În diferenŃialele autoblocabile din varianta a III-a, momentul
de frecare dintr-un cuplaj se calculează cu relaŃia:
,2
BM
AM df += (6.11)
adică, reprezintă suma momentelor de frecare calculate cu relaŃiile (6.4) şi (6.6).
Coeficientul de blocare se calculează folosind relaŃia de definiŃie:
.2
2
max1
2
fd
fd
MM
MM
M
M
−
+=
=λ (6.12)

76
Fig. 6.15. Schema diferenŃialului autoblocabil, varianta a III-a.
Fig. 6.16. Diagrama de blocare a diferenŃialului, varianta a III-a.
Diagrama de blocare pentru această variantă a diferenŃialului autoblocabil se construieşte
folosind aceeaşi metodă şi este prezentată în figura 6.16.
În figura 6.17 este reprezentată construcŃia unui diferenŃial cu autoblocare, varianta a III-a
(Lok-O-Matic).
De menŃionat că în literatura apuseană calităŃile de blocare ale diferenŃialului sunt evaluate
cu ajutorul coeficientului de frecare internă:
.d
f
M
MS = (6.13)
łinând cont de relaŃiile (6.12) şi (6.13), între coeficienŃii λ şi S se stabilesc următoarele
relaŃii reciproce:
( ).
12
1;
21
21
+−
=−+
=λ
λλ S
S
S
Pentru coeficientul de frecare internă se recomandă valorile S = 0,25…0,4, ceea ce
corespunde unui coeficient de blocare λ = 3...9.

77
Fig. 6.17. ConstrucŃia diferenŃialului cu frecare interioară mărită cu cuplaje cu discuri de fricŃiune Lok-O-
Matic: 1 – roată planetară; 2 – carcasa diferenŃialului; 3 şi 5 – discuri de presiune; 4 – sateliŃi; 6 – discuri de
fricŃiune solidare cu carcasa diferenŃialului; 7 – discuri de fricŃiune solidare cu pinioanele planetare; 8 – axul
sateliŃilor.
Să ne reamintim...
• DiferenŃialul este subansamblul transmisiei care se plasează între transmisia centrală
şi transmisia finală a tractoarelor pe roŃi, având rolul de a permite roŃilor motoare să se
rotească cu viteze unghiulare diferite.
• DiferenŃialul elimină puterea parazită în puntea motoare, fenomen care ar apărea dacă
roŃile motoare ar fi montate pe un arbore comun. Prin urmare, datorită diferenŃialului,
se reduc solicitările şi pierderile mecanice în transmisie, se micşorează uzura pneurilor
şi se ameliorează manevrabilitatea tractorului.
• Momentul de calcul Md la carcasa diferenŃialului se calculează comparând momentul

78
Mcm, transmis de motor, cu cel din condiŃia de aderenŃă Mcϕ :
• pentru diferenŃialul punŃii din spate:
( ).,min;; 222
2222 ϕϕ η
ϕηη ccmd
ffccccvcvncm MMM
i
rGMiiMM ===
• pentru diferenŃialul punŃii din faŃă:
( ).,min;; 111
1111 ϕϕ η
ϕηηη ccmd
ffcccrrcvcvncm MMM
i
rGMiiiMM ===
• Momentul de calcul pentru arborii planetari se calculează cu următoarele relaŃii:
• pentru puntea din faŃă:
( ) .,min;;1 1
11
11
1
11 ϕϕ η
ϕλ
λccmp
ffcdcm MMM
i
rQMMM ==
+=
• pentru puntea din spate:
( ) .,min;;1 2
22
21
2
11 φccmp
ffcdcm MMM
ηi
rφQM
λ
λMM ==
+=
• Momentul de calcul pentru angrenajul satelit – roată planetară se stabileşte luând în
considerare numărul sateliŃilor ns ai diferenŃialului :
MM
n
z
zp
s
s
p1
1
1
= ⋅ sau, respectiv, MM
n
z
zp
s
s
p2
2
2
= ⋅ .
• Coeficientul de blocare al diferenŃialului se defineşte prin raportul valorilor, maximă
şi minimă, a momentelor de torsiune, care acŃionează simultan asupra celor doi arbori
planetari. Cu ajutorul acestui coeficient se apreciază calităŃile de blocare ale unui
diferenŃial cu frecare mărită. RelaŃia lui de calcul este:
.12
2
max1
2 >−
+=
=
fd
fd
MM
MM
M
Mλ
• Se defineşte coeficientul de frecare internă prin raportul:
.d
f
M
MS =
U6.7. Rezumat
În cadrul acestei unităŃi de învăŃare au fost tratate particularităŃile funcŃionale,
constructive şi de calcul ale diferenŃialelor utilizate la tractoare.
S-au prezentat rolul şi clasificarea diferenŃialelor.
Pornind de la funcŃionarea diferenŃialului simplu, a fost demonstrată necesitatea
blocării diferenŃialelor în anumite condiŃii. Au fost prezentate scheme de blocare a

79
diferenŃialelor.
Au fost prezentate elemente de calcul a diferenŃialelor.
În ultima parte au fost prezentate elemente legate de funcŃionarea şi de calculul
mai multor variante de diferenŃiale autoblocabile cu discuri de fricŃiune.
U6.8. Test de evaluare a cunoştinŃelor
1. Care este rolul diferenŃialului în transmisia unui tractor?
2. În ce condiŃii este necesară blocarea diferenŃialului?
3. DefiniŃi coeficientul de blocare a diferenŃialului.
4. DefiniŃi coeficientul de frecare internă.
5. Pentru un diferenŃial autoblocabil a cărui valoare a coeficientului de frecare internă
este S = 0,3, se cere să se determine mărimea coeficientului de blocare λ.

80
Unitatea de învăŃare 7. ParticularităŃi funcŃionale şi constructive ale transmisiilor finale ale tractoarelor
Cuprins
U7.1. Introducere ...........................................................................................................80
U7.2. CompetenŃe ..........................................................................................................80
U7.3. Rolul şi clasificarea transmisiilor finale ..............................................................80
U7.4. Transmisia finală a tractoarelor pe roŃi ................................................................81
U7.5. Regimul de calcul al transmisiei finale, utilizată la tractoarele pe roŃi................85
U7.6. Rezumat ...............................................................................................................86
U7.7. Test de autoevaluare a cunoştinŃelor....................................................................87
U7.1. Introducere
În cadrul acestei unităŃi de învăŃare sunt prezentate particularităŃi
funcŃionale şi constructive ale transmisiilor finale ale tractoarelor, atât pentru
puntea din faŃă, cât şi pentru cea din spate. Sunt prezentate, de asemenea, elemente
de calcul ale transmisiilor finale folosite la tractoare.
U7.2. CompetenŃele unităŃii de învăŃare
După parcurgerea materialului acestei unităŃi de învăŃare studenŃii vor fi
capabili:
• să cunoască rolul şi clasificarea transmisiilor finale ale tractoarelor;
• să cunoască problemele legate de aspectele particulare ale construcŃiei şi
funcŃionării transmiisilor finale ale tractoarelor;
• să poată stabili corect regimul de calcul al transmisiilor finale şi a principiilor
de proiectare a acestora.
Durata medie de parcurgere a acestei unităŃi de învăŃare este de 2 ore.
U7.3. Rolul şi clasificarea transmisiilor finale
Transmisia finală este ultimul ansamblu al transmisiei. Ea este plasată după diferenŃial, la
tractoarele pe roŃi, şi după mecanismul de direcŃie, la tractoarele pe şenile şi are rolul de a transmite
momentul de torsiune la roŃile motoare. Deoarece, în general, transmisiile finale realizează rapoarte
mari de transmitere, ele contribuie într-o măsură considerabilă la reducerea solicitărilor din
ansamblurile transmisiei plasate înaintea lor (permite acestor ansambluri să funcŃioneze la turaŃii de
câteva ori mai mari şi, prin urmare, cu momente de torsiune mult mai mici). În afară de aceasta,

81
transmisiile finale servesc, în majoritatea cazurilor, şi pentru realizarea unei lumini mari a
tractorului.
Transmisiile finale se clasifică în funcŃie de tipul construcŃiei, numărul de trepte şi de locul
de amplasare.
Din punct de vedere constructiv, transmisiile finale pot fi cu roŃi dinŃate şi cu lanŃ. La rândul
lor, cele cu roŃi dinŃate pot fi cu arbori cu axe fixe şi planetare.
După numărul treptelor, transmisiile finale pot fi: simple (cu un singur angrenaj), duble (cu
două angrenaje) şi cu mai multe trepte.
După locul de amplasare, transmisiile finale pot fi dispuse lângă diferenŃial sau lângă roŃile
motoare (uneori în butucul roŃii).
U7.4 Transmisia finală a tractoarelor pe roŃi
La majoritatea tractoarelor, transmisiile finale sunt de tipul cu roŃi dinŃate cu arbori cu axe
fixe. Cea mai largă utilizare au primit-o transmisiile finale simple cu angrenare exterioară, cu
rapoarte de transmitere if = 4…7. Tipul transmisiei finale şi locul ei de plasare în raport cu roŃile
motoare sunt determinate de tipul şi destinaŃia tractorului. La tractoarele universale pe roŃi,
transmisiile finale se aşază, de obicei, lângă diferenŃial, în carterul transmisiei (fig. 7.1).
Fig. 7.1. Schema punŃii din spate cu transmisie finală plasată lângă diferenŃial.
În acest caz, puntea din spate are o construcŃie mai compactă şi este mai rigidă, însă are
dezavantajul că se reduce considerabil lumina tractorului. În plus, arborii roŃilor motoare au o
lungime mare.
În cazurile în care trebuie să se asigure o lumină mare a tractoarelor, transmisiile finale se
aşază lângă roŃile motoare (fig. 7.2). Asemenea construcŃii au avantajul că permit scurtarea arborilor
solicitaŃi puternic (arborii roŃilor motoare) şi eliberează spaŃiul de sub tractor, însă prezintă
dezavantajul că au o construcŃie mai puŃin compactă şi mai puŃin rigidă.

82
Fig. 7.2. Schema punŃii din spate cu transmisie finală plasată lângă roata motoare: a – carterul punŃii din spate; b – carterul transmisiei finale; c – îmbinare cu şuruburi.
Transmisiile finale, în ultimul caz, au carterele lor proprii, care se prind cu şuruburi de
carterul punŃii din spate. Această construcŃie prezintă avantajul modificării luminii tractorului.
Aceasta se realizează astfel: se desfac şuruburile îmbinării c şi se roteşte carterul b în raport cu a.
Această soluŃie constructivă se foloseşte la tractoarele de putere mică şi, uneori, mijlocie (de
exemplu, la familiile de tractoare U 445, U 533, U 643).
În cazul tractoarelor care necesită lumină foarte mare, se folosesc transmisii finale cu lanŃ
sau combinate ca cea din figura 7.3. Această soluŃie se foloseşte, de exemplu, la tractoarele U 445
HC, U 533 HC, U 643 HC (high-clearance), utilizate în pomicultură (HCP), legumicultură (HCL)
sau în viticultură (HCV).
Fig. 7.3. Schema transmisiei finale combinate (cu lanŃ şi angrenaj cu roŃi dinŃate).
În prezent, la tractoarele de putere mare, este pe cale de a se generaliza transmisiile finale
planetare. Această variantă se extinde şi la tractoarele de putere mijlocie. În figura 7.4 este
prezentată schema cinematică a unei asemenea transmisii. Aceasta are raportul de transmitere
7...411
31 =+==z
zi
Hf ω
ω,
unde z1 şi z3 sunt numerele de dinŃi ai roŃii planetare 1, respectiv ai coroanei 3.

83
Transmisiile finale planetare au următoarele avantaje: construcŃie compactă şi rigidă;
fiabilitate ridicată datorită faptului că momentul de torsiune este transmis prin mai multe perechi de
dinŃi (egal cu numărul sateliŃilor). Ele prezintă însă dezavantajul că nu participă la realizarea luminii
tractorului (arborele de intrare este coaxial cu cel de ieşire).
Fig. 7.4. Schema cinematică a transmisiei finale planetare pentru puntea din spate: 1 – roată planetară; 2 – satelit; 3 – coroană; H – braŃ portsatelit.
În puntea din faŃă a tractoarelor 4×4, cea mai largă utilizare o au transmisiile finale
planetare. În figura 7.5 este reprezentată schema cinematică a unei asemenea transmisii. Elementul
conducător este roata planetară 1, condus – braŃul portsatelit H, de blocare (fix) – coroana 3.
Transmisia finală de acest tip are raportul de transmitere 5...311
3 =+=z
zi f .
Fig. 7.5. Schema cinematică a transmisiei finale planetare pentru punte faŃă cu element de blocare coroana: 1 – roată planetară; 2 – satelit; 3 – coroană; H – braŃ portsatelit.
O altă variantă de transmisie finală planetară este cea din figura 7.6 care, de fapt, este o
transmisie pseudoplanetară, întrucât are braŃul portsatelit fix. Transmisia finală de acest tip are raportul de transmitere 5...313 =−= zzi f . Semnul minus are semnificaŃia schimbării sensului de
rotaŃie a elementului condus în raport cu cel conducător.

84
Fig. 7.6 Schema cinematică a transmisiei finale pseudoplanetare pentru punte faŃă cu element de blocare braŃul portsatelit: 1 – roată planetară; 2 – satelit; 3 – coroană; H – braŃ portsatelit.
La unele tractoare, de exemplu, la tractoarele japoneze Kubota se utilizează transmisii finale
în puntea din faŃă neplanetare. Astfel, în figura 7.7 este reprezentată schema unei transmisii finale
cu roŃi dinŃate cilindrice cu arbori ficşi. O asemenea schemă este utilizată şi la tractorul românesc de
putere mică (20 CP) HART 200. Această variantă constructivă, spre deosebire de transmisia
planetară, prezintă avantajul că participă la realizarea luminii tractorului.
Fig. 7.7. Schema cinematică a punŃii din faŃă cu transmisie finală cu angrenaje cilindrice.
Tot firma Kubota utilizează transmisii finale în puntea din faŃă cu angrenaje conice (fig.
7.8). În această variantă constructivă, nu mai este necesar cuplajul homocinetic, ceea ce permite
obŃinerea unui unghi de bracare mărit.
Fig. 7.8. Schema cinematică a punŃii din faŃă cu transmisie finală cu angrenaje conice.

85
U 7.5 Regimul de calcul al transmisiei finale, utilizată la tractoarele pe roŃi
La transmisiile finale este necesar să se calculeze roŃile dinŃate, arborii, îmbinările carterelor
şi să se aleagă (sau să se verifice) rulmenŃii. Regimul de calcul al transmisiilor finale se stabileşte
pentru fiecare caz concret în parte, în funcŃie de tipul şi construcŃia lor.
În figura 7.9 sunt trasate forŃele care acŃionează asupra transmisiei finale din spate a unui
tractor pe roŃi. În aceeaşi schemă este indicat şi momentul de torsiune la intrarea în transmisia
finală, care reprezintă momentul de calcul al acestui subansamblu. Momentul de calcul se stabileşte
comparând momentul Mcm, transmis de motor, cu cel de aderenŃă Mcϕ.
Fig. 7.9. Schema de calcul a transmisiei finale simple: 1 şi 2 – roŃile dinŃate cilindrice ale transmisiei finale.
• Momentul de torsiune transmis de motor transmisiei finale se calculează cu relaŃia:
,1 2
222 λ
ληη
+= cccvcvncm iiMM
în care: Mn este momentul nominal al motorului;
icv - raportul de transmitere al cutiei de viteze (se adoptă raportul de transmitere al
cutiei de viteze compuse pentru treapta I);
ic2 - raportul de transmitere al transmisiei centrale din spate;
ηcv - randamentul cutiei de viteze;
ηc2 - randamentul transmisiei centrale din spate;
λ2 - coeficientul de blocare al diferenŃialului din spate.
• Momentul de calcul din condiŃia de aderenŃă (momentul la roata motoare din condiŃia de
aderenŃă cu solul, redus la arborele planetar) se determină cu relaŃia:
,22
22
ffc i
rQM
ηϕ
ϕ =
în care: if2 este raportul de transmitere al transmisiei finale din spate;
ηf2 - randamentul transmisiei finale din spate;
Q2 - greutatea repartizată pe o roată motoare din spate;
r2 - raza dinamică a roŃilor din spate;

86
ϕ - coeficientul de aderenŃă (se adoptă ϕ = 0,8);
• Momentul de calcul va fi: ( )⋅== ϕccmc MMMM ,min
În angrenajul transmisiei finale acŃionează forŃa tangenŃială
,2
1mz
MFt =
şi forŃa radială ;αtgFF tr =
în care: z1 este numărul de dinŃi al pinionului; m - modulul angrenajului;
α - unghiul de angrenare.
Asupra roŃii motoare acŃionează forŃele:
• forŃa tangenŃială de tracŃiune (forŃa motoare la o roată), care rezultă din ecuaŃia de
momente:
Fmz
Tr TF mz
rtt2
22
22 2= ⇒ = .
• reacŃiunea verticală a solului Q2 (dacă nu sunt date suficiente pentru calculul ei, se
adoptă egală cu capacitatea maximă de încărcare a pneului);
• reacŃiunea transversală Y, care apare în cazul exploatării tractorului pe o pantă
transversală. Se determină din condiŃia de aderenŃă în direcŃie transversală: ,2 yQY ϕ=
unde ϕy este coeficientul de aderenŃă în direcŃie transversală (se adoptă ϕy = 0,7).
U7.6. Rezumat
În cadrul acestei unităŃi de învăŃare au fost prezentate particularităŃi
funcŃionale şi constructive ale transmisiilor finale ale tractoarelor, atât pentru puntea
din faŃă, cât şi pentru cea din spate, cu exemplificări variate pe schemele cinematice
ale transmisiilor unor tractoare româneşti şi străine.
Au fost prezentate, de asemenea, elemente de calcul ale transmisiilor finale
folosite la tractoare.

87
U7.7. Test de autoevaluare a cunoştinŃelor
1. Pentru schema din figura de mai jos să se stabilească:
a) semnificaŃia notaŃiilor;
b) relaŃia de calcul a raportului de transmitere.
2. Pentru transmisia finală din figura de mai jos se cunosc: z1=20; z2=30; z3=80.
Să se calculeze raportul de transmitere al transmisiei finale.
3. Pentru transmisia finală din figura de mai jos se cunosc: z1=20; z2=26; if= - 3,6.
a) Să se calculeze numărul de dinŃi al coroanei dinŃate 3;

88
b) Ce semnificaŃie fizică are valoarea negativă a raportului de transmitere?
Răspunsuri:
1) a) D – diferenŃial; 1 şi 2 – roŃi transmisie cu lanŃ; 3şi 4 – roŃi dinŃate;
2) 511
3 =+=z
zi f ;
3) a) z1=72; b) Semnul minus are semnificaŃia schimbării sensului de rotaŃie a
elementului condus în raport cu cel conducător.

89
Unitatea de învăŃare 8. Prize de putere pentru tractoare
Cuprins
U8.1. Introducere .......................................................................................................... 89
U8.2. CompetenŃe ......................................................................................................... 89
U8.3. Rolul şi clasificarea prizelor de putere................................................................ 90
U8.4. Parametrii constructivi şi funcŃionali ai prizelor de putere ................................. 95
U8.5. Regimul de calcul al transmisiei prizei de putere ............................................... 98
U8.6. Rezumat ............................................................................................................ 100
U8.7. Test de autoevaluare a cunoştinŃelor ................................................................. 100
U8.1. Introducere
În cadrul acestei unităŃi de învăŃare sunt prezentate aspecte legate de prizele
de putere ale tractoarelor. După prezentarea rolului prizelor de putere în transmisia
tractoarelor, se face o clasificare a acestora. Se pune accent pe prizele de putere
mecanice prin exemplificări variate, însoŃite de detalii funcŃionale. Sunt prezentaŃi
parametrii constructivi şi funcŃionali standardizaŃi ai prizelor de putere. Sunt
expuse principii pentru stabilirea regimului de calcul al prizelor de putere.
U8.2. CompetenŃele unităŃii de învăŃare
După parcurgerea materialului acestei unităŃi de învăŃare studenŃii vor fi
capabili:
• să cunoască rolul şi clasificarea prizelor de putere;
• să cunoască tipul şi principiul de funcŃionare al prizelor de putere, pornind de la
scheme cinematice ale acestora;
• să cunoască parametrii constructivi şi funcŃionali standardizaŃi ai prizelor de
putere;
• să stabilească regimul de calcul al prizelor de putere.
Durata medie de parcurgere a acestei unităŃi de învăŃare este de 3 ore.

90
U8.3 Rolul şi clasificarea prizelor de putere
Prizele de putere sunt echipamente de lucru destinate transmiterii puterii de la motorul
tractorului la organele de lucru ale maşinilor şi utilajelor cu care tractorul lucrează în agregat.
Clasificarea prizelor de putere se poate face după mai multe criterii, şi anume:
a) Clasificarea după modul de transmitere a energiei de la motorul tractorului la
organele de lucru ale maşinii:
- prize de putere mecanice;
- prize de putere hidraulice;
- prize de putere electrice.
Prizele de putere mecanice transmiterea puterii motorului se realizează printr-o
transmisie mecanică, antrenarea utilajelor făcându-se printr-un arbore de ieşire denumit
arborele prizei de putere (APP).
Prizele de putere hidraulice realizează transmiterea puterii motorului la o pompă
hidraulică, de la care, prin intermediul unei instalaŃii hidraulice, se acŃionează motoarele
hidraulice (cilindri, motoare rotative etc.) aflate pe tractor sau pe maşinile cuplate la tractor
(fig. 8.1).
Fig. 8.1. Schema prizei de putere hidrostatice:
P – pompă hidrostatică cu debit variabil; M – motor hidrostatic; A.P.P. – arborele prizei de putere;
M.A.I. – motor cu ardere internă.
Prizele de putere electrice realizează transmiterea puterii motorului la un generator
electric şi, în continuare, la electromotoarele de acŃionare aflate pe maşinile cuplate la tractor
(fig. 8.2). Aceste prize de putere se utilizează, în special, la tractoare cu transmisii electrice.
Fig. 8.2. Schema prizei de putere electrice: G – generator electric; M – motor electric; A.P.P. – arborele prizei de putere; M.A.I. – motor cu ardere internă.
În prezent, tractoarele agricole sunt echipate în mod obligatoriu cu prize de putere
mecanice.

91
Arborii de ieşire ai prizelor pot fi plasaŃi în spate, lateral şi în faŃa tractorului.
Conform standardelor naŃionale şi internaŃionale actuale, plasarea în spate a arborelui
prizei de putere (APP) este obligatorie.
b) Clasificare în funcŃie de caracterul turaŃiei realizate:
- prize de putere cu turaŃie constantă (PP normale);
- prize de putere cu turaŃie sincronă (PP sincrone);
- prize de putere combinate (PP mixte).
Prizele de putere cu turaŃie constantă, denumite prize de putere normale, sunt
prizele de putere la care arborele se roteşte cu turaŃie constantă şi în acelaşi sens, indiferent de
treapta din cutia de viteze şi indiferent de sensul de deplasare a tractorului (cu condiŃia ca
turaŃia motorului să fie constantă). TuraŃiile arborelui prizei de putere sunt reglementate prin
standarde naŃionale şi internaŃionale. Prizele de putere normale pot fi cu o singură treaptă, cu
două sau cu patru trepte (mai rar, şi cu trei trepte).
Prizele de putere sincrone sunt prizele la care arborii de ieşire se rotesc cu o turaŃie
proporŃională (sincronizată) cu viteza şi sensul de deplasare a tractorului. Aceste prize se
folosesc pentru antrenarea unor maşini şi utilaje ale căror organe de lucru trebuie să execute
un anumit număr de operaŃii pe o distanŃă de deplasare dată (de exemplu, pentru maşinile de
plantat răsaduri). De asemenea, prizele de putere sincrone se folosesc pentru antrenarea
punŃilor motoare (active) ale remorcilor şi semiremorcilor.
În cazul ideal, priza de putere normală trebuie să îndeplinească următoarele patru
condiŃii:
1. pornirea şi oprirea tractorului fără oprirea organelor de lucru ale maşinilor
agricole;
2. demararea prealabilă a organelor de lucru ale maşinilor agricole şi apoi pornirea şi
demararea întregului agregat;
3. schimbarea vitezelor de deplasare a tractorului fără oprirea organelor de lucru ale
maşinilor;
4. pornirea şi oprirea organelor de lucru ale maşinilor fără oprirea tractorului.
După modul în care îndeplinesc cele 4 condiŃii, PP normale se clasifică în următoarele
tipuri principale:
- prize de putere dependente, care nu îndeplinesc nici una din condiŃiile amintite.
Antrenarea APP se întrerupe o dată cu decuplarea ambreiajului principal;
- prize de putere semiindependente, care permit îndeplinirea parŃială a condiŃiilor
impuse (în general, primele trei condiŃii);
- prize de putere independente, care permit îndeplinirea integrală a celor patru
condiŃii. Antrenarea arborelui prizei de putere nu este influenŃată de decuplarea
ambreiajului principal.

92
În continuare, clasificarea prizelor de putere este exemplificată prin scheme de
principiu.
Prize de putere normale
a) Prize de putere dependente
În figura 8.3 este prezentată schema unei prize dependente. Prin decuplarea
ambreiajului principal A1 se întrerupe şi acŃionarea arborelui prizei de putere. Aşadar,
funcŃionarea prizei de putere este influenŃată de ambreiajul principal.
Fig. 8.3. Schema prizei de putere dependente: A1 – ambreiajul principal; CV – cutia de viteze; RPP –
reductorul prizei de putere; APP – arborele prizei de putere.
b) Prize de putere semiindependente
Fig. 8.4. Schema prizei de putere semiindependente: A1 – ambreiajul principal; A2 – ambreiajul
suplimentar; CV – cutia de viteze; RPP – reductorul prizei de putere; APP – arborele prizei de putere.
Schema din figura 8.4 reprezintă o priză de putere semiindependentă, care permite
îndeplinirea parŃială a condiŃiilor menŃionate mai sus. De exemplu, prin decuparea
ambreiajului suplimentar A2 pot fi schimbate treptele în cutia de viteze fără a întrerupe
funcŃionarea prizei de putere.
c) Prize de putere independente - permit îndeplinirea tuturor condiŃiilor menŃionate.
Schema din figura 8.5 permite realizarea unei prize de putere independente. Această
priză este acŃionată, în acest caz, direct de la arborele cotit. Ambreiajul suplimentar A2 permite

93
cuplarea progresivă a arborelui prizei de putere şi întreruperea temporară a funcŃionării
acesteia.
Fig. 8.5. Schema prizei de putere independente: A1 – ambreiajul principal; A2 – ambreiajul
suplimentar; CV – cutia de viteze; RPP – reductorul prizei de putere; APP – arborele prizei de putere.
Schema prizei de putere independente din figura 8.6 este principial identică cu cea din
figura 8.5, diferenŃa constând în soluŃia constructivă diferită de antrenare a prizei de putere de
către motor.
Fig. 8.6. Schema prizei de putere independente: A1 – ambreiajul principal; A2 – ambreiajul
suplimentar; CV – cutia de viteze; RPP – reductorul prizei de putere; APP – arborele prizei de putere.
Analizând schema din figura 8.7 nu se poate trage concluzia asupra tipului prizei. Este
necesar să se cunoască modul de decuplare al ambreiajului dublu A1-A2. Dacă ambreiajele se
decuplează în serie, priza de putere este semiindependentă, iar dacă decuplarea lor se face în
paralel, priza de putere este independentă.
Fig. 8.7. Schema prizei de putere cu ambreiaj dublu: A1 – ambreiajul principal; A2 – ambreiajul prizei
de putere; CV – cutia de viteze; RPP – reductorul prizei de putere; APP – arborele prizei de putere.

94
Schema din figura 8.8 diferă de cea din figura 8.7 prin ordinea de plasare diferită a
celor două ambreiaje: lângă volant se află ambreiajul prizei de putere, iar după el ambreiajul
principal. Această soluŃie constructivă este folosită la familiile de tractoare U 445 (cu ambele
variante de ambreiaj dublu), U 850 şi U 1010 (cu decuplarea în paralel a ambreiajelor).
Fig. 8.8. Schema prizei de putere cu ambreiaj dublu: A1 – ambreiajul principal; A2 – ambreiajul prizei
de putere; CV – cutia de viteze; RPP – reductorul prizei de putere; APP – arborele prizei de putere.
Prize de putere sincrone şi combinate.
În continuare, sunt prezentate două scheme pentru prize de putere sincrone.
Constructiv, aceste prize se caracterizează prin:
- sunt acŃionate de arborele secundar al cutiei de viteze sau de un arbore plasat după
acesta;
- raportul de transmitere dintre arborele primar al transmisiei prizei de putere sincrone
şi arborele prizei de putere este constant.
În figura 8.9 este dată schema unei prize de putere sincrone acŃionată de arborele
secundar al cutiei de viteze. Această variantă, sub diferite forme constructive, este folosită la
toate tractoarele româneşti pe roŃi.
Fig. 8.9. Schema prizei de putere sincrone: A1 – ambreiajul principal; CV – cutia de viteze; RPP –
reductorul prizei de putere; APP – arborele prizei de putere.
Priza de putere sincronă din figura 8.10 este acŃionată de coroana transmisiei centrale.
Prin aceasta se asigură sincronizarea dintreturaŃia arborelui prizei şi viteza de deplasare a
tractorului.

95
Fig. 8.10. Schema prizei de putere sincrone cu antrenarea de la coroana transmisiei centrale: A1 –
ambreiajul principal; CV – cutia de viteze; APP – arborele prizei de putere.
În general, pentru universalizarea tractoarelor pe roŃi, se utilizează prize de putere
combinate, normale şi sincrone. Pentru exemplificare, în figura 8.11 este reprezentată schema
prizei de putere utilizată la familia de tractoare U650. Prin deplasarea manşonului în sensul S,
se obŃine priza de putere sincronă, iar prin deplasarea manşonului în sens opus (sensul N), se
obŃine priza de putere normală, în acest caz – independentă. Dacă frâna F1 este strânsă, iar
frîna F2 – liberă, arboreal prizei de putere este acŃionat. Dacă frâna F2 este strânsă, iar frîna F1
– liberă, arboreal prizei de putere este frânat. Cele două frâne funcŃionează în opoziŃie, fiind
acŃionate de la acelaşi sistem de comandă. Frâna F1 îndeplineşte şi rolul ambreiajului
suplimentar A2 din schemele anterioare. De exemplu, prin strângerea progresivă a frânei F1,
este antrenat progresiv arboreal prizei de putere. Frâna F2 are rol de protecŃie: împiedică
rotirea arborelui prizei de putere în starea decuplată a prizei, rotire datorată frecărilor interne
din redactor.
F1 – rol de ambreiaj F1 F2 1 0 - APP funcŃionează 0 1 - APP frânat
Fig. 8.11. Schema prizei de putere combinate: APP – arborele prizei de putere; F1 – frână de blocare a
reductorului planetar; F2 – frână de blocare a arborelui prizei de putere.
U8.4 Parametrii constructivi şi funcŃionali ai prizelor de putere
Aceşti parametri trebuie să se încadreze în norme şi standarde internaŃionale şi
naŃionale, în ceea ce priveşte turaŃia şi sensul de rotaŃie, dimensiunile constructive şi
amplasarea pe tractor a arborelui prizei de putere.

96
În prezent, pe plan internaŃional sunt standardizate două turaŃii nominale pentru turaŃia
arborelui prizei de putere: 540 şi, respectiv, 1000 rot/min. Sensul de rotaŃie al arborelui prizei
de putere este cel orar pentru un observator care este plasat în spatele tractorului şi priveşte în
direcŃia de mers înainte a tractorului.
TuraŃia nominală a arborelui prizei de putere este obŃinută la o turaŃie a motorului de
80…90% din turaŃia sa nominală.
În cazul prizelor de putere sincrone sunt standardizate două game de turaŃii: arborele
de ieşire al prizei trebuie să asigure 3,3…3,5 rotaŃii, respectiv, 6,1…6,5 rotaŃii pe o distanŃă de
1 m parcursă de tractor.
Parametrii arborilor prizei de putere plasaŃi în spatele tractorului sunt standardizaŃi
prin STAS 8802. Conform acestui standard, sunt trei tipuri constructive de arbori, în funcŃie
de puterea transmisă (v. tab. 8.1).
Tabelul 8.1
Tipurile de arbori ai prizelor de putere în funcŃie de puterea transmisă Tipul APP TuraŃia, rot/min Puterea la APP, kW
1 540 ≤ 48 2 1000 48…92 3 1000 92…185
Arborii de tipul 1 au caneluri dreptunghiulare.
Arborii de tipul 2 şi 3 au caneluri în evolventă.
Alte elemente standardizate ale prizelor de putere sunt (fig. 8.12):
- poziŃia arborelui prizei de putere faŃă de planul longitudinal de simetrie al
tractorului, reprezentată în figură prin cota e (e = ±50 mm);
- poziŃia arborelui prizei de putere faŃă de sol (cota nominală h ia valori între limitele
hmin şi hmax);
- poziŃia arborelui prizei de putere faŃă de bara de tracŃiune, reprezentată în figură
prin cota A;
- zona de protecŃie în jurul arborelui prizei de putere.
Fig. 8.12. Zona de plasare a arborelui prizei de putere.
În cazul prizelor de putere cu două turaŃii standard, arborii prizelor de putere pot avea
două ieşiri, utilizând câte un arbore corespunzător fiecărei turaŃii sau o singură ieşire pentru

97
ambele turaŃii, montând arborele corespunzător turaŃiei respective. Ultima variantă este
aproape generalizată.
În figura 8.13 este reprezentată schema funcŃională a unui redactor cu două treptede
turaŃie pentru priza de putere. Trecerea de la o turaŃie la alta se realizează prin înlocuirea
arborelui prizei. Arborele prizei de putere APP1, corespunzător turaŃiei n=540 rot/min, este
antrenat prin canelurile roŃii dinŃate 5 cu raportul de transmitere 540
1000
4
5
2
31 =⋅=
z
z
z
zi . Arborele
prizei de putere APP2, corespunzător turaŃiei n=1000 rot/min, este antrenat de arboreal de
intrare 1 (i2=1).
Fig. 8.13 Schema funcŃională a unui redactor cu două trepte de teuraŃie pentru priza de putere: a –
pentru turaŃia de 540 rot/min; b – pentru turaŃia de 1000 rot/min.
O altă variantă de acŃionare a arborelui prizei de putere cu două trepte de turaŃie este
reprezentată în figura 8.14.
Fig. 8.14. Schema cinematică a reductorului cu două trepte de turaŃie pentru priza de putere utilizată la
tractoarele U 850 şi U 1010.
În cazul forŃelor de tracŃiune mici, când puetrea motorului nu este folosită complet,
motorul trebuie să funcŃioneze la sarcini parŃiale, cu turaŃii reduse cu până la 40% din turaŃia
nominală. În acest mod se reduce consumul specific de combustibil al motorului, însă
concomitant se reduce şi turaŃia la arboreal prizei de putere faŃă de turaŃia standard. Pentru a
elimina acest dezavantaj, se folosesc din ce în ce mai mult prize de putere suplimentare, aşa-

98
zise prize economice. Prizele de putere suplimentare (economice) permit modificarea
raportului de transmitere în transmisia prizei de putere, compensând în acest mod reducerea
turaŃiei motorului. Ele au turaŃii mai mari decât cele standardizate corespunzătoare, însă, prin
reducerea turaŃiei motorului se obŃin turaŃiile standard.
În figurile 8.15 şi 8.16 sunt reprezentate schemele cinematice ale transmisiilor prizelor
de putere cu patru trepte de duraŃie (540, 750, 1000 şi 1400 rot/min). Modul de obŃinere a
acestor trepte rezultă din schemele respective.
Fig. 8.15. Schema cinematică a transmisie prizei de putere
cu patru trepte de turaŃie utilizată de firma Deutz-Fahr la modelele
Agrotron de 50…114 kW.
Fig. 8.16. Schema cinematică a transmisie prizei de putere cu patru trepte de turaŃie utilizată de firma
Fendt la modele Favorit.
U8.5 Regimul de calcul al transmisiei prizei de putere
Ansamblurile transmisiei prizei de putere se calculează plecând de la ipoteza că prin
ea se transmite întreaga putere a motorului. Această încărcare a transmisiei poate să apară în
următoarele două cazuri:

99
• priza de putere este folosită la anumite lucrări staŃionare;
• motorul tractorului este încercat, fără a fi demontat de pe tractor, prin intermediul
prizei de putere (între arborele prizei de putere şi frâna de încărcare a motorului se
montează o transmisie cardanică). Pe arborele prizei de putere se montează
traductoare pentru măsurarea momentului de torsiune şi a turaŃiei.
Să ne reamintim...
• Prizele de putere sunt echipamente de lucru destinate transmiterii puterii
de la motorul tractorului la organele de lucru ale maşinilor şi utilajelor cu care
tractorul lucrează în agregat.
• După modul de transmitere a energiei de la motorul tractorului la
organele de lucru ale maşinii, prizele de putere pot fi:
- prize de putere mecanice;
- prize de putere hidraulice;
- prize de putere electrice.
•. Prize de putere mecanice, în funcŃie de caracterul turaŃiei realizate, pot fi:
- prize de putere cu turaŃie constantă (PP normale);
- prize de putere cu turaŃie sincronă (PP sincrone);
- prize de putere combinate (PP mixte).
• Prize de putere cu turaŃie constantă (normale) sunt prizele de putere la
care arborele se roteşte cu turaŃie constantă şi în acelaşi sens, indiferent de treapta
din cutia de viteze şi indiferent de sensul de deplasare a tractorului (la o turaŃie
constantă a motorului).
• Prize de putere cu turaŃie normale pot fi:
- prize de putere dependente;
- prize de putere semiindependente;
- prize de putere independente.
• Prizele de putere sincrone sunt prizele la care arborii de ieşire se rotesc
cu o turaŃie proporŃională (sincronizată) cu viteza şi sensul de deplasare a
tractorului.
• Parametrii constructivi şi funcŃionali ai prizelor de putere sunt
standardizaŃi. Aceşti parametri trebuie să se încadreze în norme şi standarde
internaŃionale şi naŃionale, în ceea ce priveşte turaŃia şi sensul de rotaŃie,
dimensiunile constructive şi amplasarea pe tractor a arborelui prizei de putere.
• Ansamblurile transmisiei prizei de putere se calculează plecând de la
ipoteza că prin ea se transmite întreaga putere a motorului.

100
U8.6. Rezumat
În cadrul acestei unităŃi de învăŃare s-au prezentate aspecte legate de prizele
de putere ale tractoarelor. După prezentarea rolului prizelor de putere în transmisia
tractoarelor, s-a făcut o clasificare a acestora. S-a pus accent pe prizele de putere
mecanice prin exemplificări variate, însoŃite de detalii funcŃionale. S-au prezentat
parametrii constructivi şi funcŃionali standardizaŃi ai prizelor de putere. Au fost
expuse principii pentru stabilirea regimului de calcul al prizelor de putere.
U8.7. Test de autoevaluare a cunoştinŃelor
1. Prizele de putere ………………. sunt prizele la care arborii de ieşire se rotesc
cu o turaŃie proporŃională cu viteza şi sensul de deplasare a tractorului.
2. Schema din figura de mai jos este schema unei prize de tipul:
a) normală independentă;
b) normală sincronă;
c) sincronă;
d) normală dependentă.
3. Pe plan internaŃional sunt standardizate două turaŃii nominale pentru turaŃia
arborelui prizei de putere. Care sunt valorile acestor turaŃii?
4. IdentificaŃi tipul prizei de putere din schema de mai jos.
5. AfirmaŃia „TuraŃia nominală a arborelui prizei de putere este obŃinută la o

101
turaŃie a motorului de 80…90% din turaŃia sa nominală” este:
a) falsă;
b) adevărată.
Răspunsuri:
1) sincrone;
2) c;
3) 540 şi 1000 rot/min;
4) normală independentă dacă ambreiajele se decuplează în paralel sau
semindependentă, dacă ambreiajele se decuplează în serie;
5) b (adevărată).

102
Unitatea de învăŃare 9. Mecanisme de suspendare pentru tractoare
Cuprins U9.1. Introducere ........................................................................................................ 102
U9.2. CompetenŃe ....................................................................................................... 102
U9.3. Rolul şi clasificarea mecanismelor de suspendare ............................................ 103
U9.4. Parametrii constructivi şi funcŃionali ai mecanismelor de suspendare în
3 puncte....................................................................................................................... 103
U9.5. AcŃionarea mecanismelor de suspendare .......................................................... 109
U9.6. Rezumat ............................................................................................................ 113
U9.7. Test de evaluare a cunoştinŃelor........................................................................ 113
U9.1. Introducere
În cadrul acestei unităŃi de învăŃare sunt prezentate aspecte legate de
mecanismele de ale tractoarelor.
După prezentarea rolului mecanismelor de suspendare în construcŃia
tractoarelor, se face o clasificare a acestora. Se pune accent pe mecanismele de
suspendare în 3 puncte. Se fac exemplificări variate, însoŃite de detalii funcŃionale.
Sunt prezentaŃi parametrii constructivi şi funcŃionali standardizaŃi ai mecanismelor
de suspendare în 3 puncte.
Se pune accent acŃionarea mecanismelor de suspendare în 3 puncte.
U9.2. CompetenŃele unităŃii de învăŃare
După parcurgerea materialului acestei unităŃi de învăŃare studenŃii vor fi
capabili:
• să cunoască rolul mecanismelor de suspendare ;
• să identifice după o schemă tipul mecanismului;
• să identifice elementele transmisiei unui tractor;
• să cunoască principiul de funcŃionare al mecanismelor de suspendare;
• să cunoască parametrii standardizaŃi ai mecanismelor de suspendare în 3 puncte;
• să identifice şi să cunoască modul de acŃionare a mecanismelor de suspendare în
3 puncte.
Durata medie de parcurgere a primei unităŃi de învăŃare este de 2 ore.

103
U9.3 ROLUL ŞI CLASIFICAREA MECANISMELOR DE SUSPENDARE
Mecanismul de suspendare reprezintă un sistem de bare articulate care serveşte
pentru cuplarea la tractor a maşinilor purtate.
În funcŃie de modul de cuplare la tractor, maşinile şi utilajele se împart în
următoarele trei tipuri de bază: tractate, semipurtate şi purtate.
Maşinile tractate (remorcate) se cuplează la tractor prin intermediul unei
articulaŃii, cu ajutorul dispozitivelor de tracŃiune şi de remorcare , având un sistem de
rulare propriu care preia greutatea maşinii în lucru şi la deplasarea în gol.
Maşinile semipurtate se sprijină atât pe tractor, prin intermediul dispozitivului
de cuplare cu articulaŃie, cât şi pe sistemul de rulare propriu, realizându-se astfel, un
transfer parŃial de sarcină de pe maşină pe tractor.
Maşinile purtate sunt maşinile a căror greutate în poziŃie de transport este
preluată în întregime de corpul tractorului şi se cuplează la tractor prin intermediul
unui dispozitiv numit mecanism de suspendare.
Maşinile purtate plasate în spatele tractorului au cea mai largă utilizare, de
aceea în prezent, toate tractoarele agricole sunt echipate cu mecanisme de suspendare
montate în spate. Există însă şi construcŃii de tractoare, mai ales cele realizate în
ultimul timp, care sunt echipate şi cu mecanisme de suspendare frontale. Aceste
tractoare sunt echipate şi cu prize de putere frontale, ceea ce le conferă o mai mare
universalitate la cuplarea şi antrenarea maşinilor.
După numărul punctelor de cuplare la tractor, mecanismele de suspendare pot
fi: în patru puncte, în trei puncte şi în două puncte.
U9.4 PARAMETRII CONSTRUCTIVI ŞI FUNCłIONALI AI MECANISMELOR DE SUSPENDARE ÎN 3 PUNCTE
Mecanismele de suspendare în trei puncte au obŃinut cea mai largă răspândire,
fiind utilizate, în prezent, la toate tractoarele agricole. Aceste mecanisme realizează o
legătură articulată în trei puncte, atât la tractor cât şi la maşina agricolă, cu ajutorul a
trei bare, denumite tiranŃi. În figura 9.1 este prezentată schema unui asemenea
mecanism, care se compune din: 1 – arbore de antrenare; 2 – braŃe de ridicare; 3 –tije
de ridicare, denumite adesea şi tiranŃi verticali (braŃe întinzătoare); 4 – tiranŃi inferiori
(laterali); 5 – tirant superior sau central. Mecanismul se montează pe tractor prin
articulaŃiile A, B şi C (formând triunghiul de cuplare al tractorului). Maşina/utilajul
agricol 6 se cuplează, tot prin articulaŃii, în punctele E, F şi G (formând triunghiul de
cuplare la maşină). Mecanismul este acŃionat de cilindrul hidraulic C.H.

104
Fig. 9.1. Schema mecanismului de suspendare în trei puncte.
Schema cinematică spaŃială din figura 2 evidenŃiază mai complet rolul
funcŃional al mecanismului de suspendare în 3 puncte. Cele 3 bare ale mecanismului, 1,
2 şi 3, se cuplează la corpul tractorului în punctele A, B şi C (triunghiul de cuplare la
tractor) şi la cadrul maşinii în punctele D, E şi F (triunghiul de cuplare la maşină).
Mecanismul este acŃionat de cilindrul hidraulic 7 prin lanŃul cinematic format de
elementele 6-5-4-2.
Fig. 9.2. Schema cinematică spaŃială a unui mecanism de suspendare în 3 puncte

105
Fig. 9.3. Schema constructivă a unui mecanism de suspendare în 3 puncte:
1,2 – tiranŃi inferiori; 3 – tirant superior; 4 – tije de ridicare; 5 – braŃ de ridicare; 6 – arbore de ridicare; 7 – pârghie arbore ridicare; 8 – traductor de forŃă; 9-biela cilindrului hidraulic
Schema constructivă unui mecanism de suspendare în trei puncte este dată in
figura 9.3.a, iar schema constructiv-funcŃională este prezentată în figura 9.3.b, unde
sunt prezentate şi elementele mecanismului de ridicare, format din braŃul de ridicare 5,
arborele de ridicare 6, acŃionat prin rotire de pârghia 7, cuplată la biela 9 a pistonului
cilindrului hidraulic. Schema prezentată este prevăzută şi cu traductorul de forŃă 8 (cu
arc lamelar) pentru comanda reglajului automat de forŃă.
Mecanismele de suspendare în 3 puncte utilizate la tractoarele agricole sunt
standardizate pe plan naŃional şi internaŃional, conform normelor SR ISO 730-1. În
funcŃie de valoarea puterii dezvoltată de tractor la priza de putere sunt patru categorii
de mecanisme de suspendare, aşa cum rezultă din tabelul 9.1.
Tabelul 9.1 Categoriile mecanismelor de suspendare (conf. SR ISO 730 – 1). Categorie Puterea, în kW*
1 până la 48 2 până la 92 3 de la 80 la 185 4** de la 150 la 350
*Puterea la priza de putere, la turaŃia nominală a motorului. **4L şi 4H (cu cursa de ridicare mai mare).
Conform normelor SR ISO 730-1 sunt standardizaŃi următorii parametri
constructivi şi funcŃionali principali:
1) PoziŃia articulaŃiilor A, B şi C pe corpul tractorului (fig. 9.2)
a. poziŃia reciprocă a acestor articulaŃii;
b. poziŃia articulaŃiilor B şi C faŃă de sol.
2) Lungimea tiranŃilor inferiori între articulaŃii.
3) PoziŃii funcŃionale:

106
a. poziŃia articulaŃiilor E şi F faŃă de sol (în poziŃiile limită, inferioară şi
superioară);
b. cursa de ridicare.
4) Dimensiunile şi poziŃia triunghiului de cuplare D, E, F (reciprocă şi faŃă de
planul de simetrie al tractorului).
5) Dimensiunile articulaŃiilor D, E, F.
O altă caracteristică importantă a mecanismului de suspendare o constituie
sarcina minimă de ridicare, aplicată la o distanŃă l = 610 mm (24 in.) în spatele
punctelor de cuplare EF. Această sarcină trebuie asigurată la o presiune de 90 % din
presiunea de reglare a supapei de siguranŃă a instalaŃiei hidraulice de acŃionare.
Forma constructivă, dimensiunile constructive ale tiranŃilor şi articulaŃiilor
acestora şi amplasarea punctelor de cuplare ale tiranŃilor mecanismelor de suspendare
plaste în spate sunt stabilite conform normelor ISO 730-1. Mecanismele de suspendare
plasate în faŃă (frontale), utilizate din ce în ce mai mult la tractoarele agricole, sunt
standardizate prin normele ISO 8759-1, parametrii constructivi şi funcŃionali fiind
aproape aceiaşi ca la mecanismele de suspendare plasate în spate.
Dimensiunile şi poziŃia triunghiului de cuplare A, B şi C (reciprocă şi faŃă de
planul de simetrie al tractorului) rezultă din figura 9.4, iar valorile concrete ale acestor
parametri, conform normelor ISO 730-1, pentru cele 4 categorii de mecanisme de
suspendare sunt date în tabelul 9.2.
Fig. 9.4. Caracteristicile tehnice principale ale elementelor de cuplare la tractor a barelor mecanismelor de suspendare în 3 puncte montate în spate (ISO 730-1)

107
Fig. 9.5. Caracteristicile tehnice importante ale elementelor de cuplare a cadrului maşinilor la barele mecanismelor de suspendare în 3 puncte montate în spate
Tab. 9.2. Caracteristicile tehnice dimensionale principale ale mecanismelor de suspendare în 3 puncte
montate în spate (ISO 730-1). Categoria mecanismului de suspendare
1 2 3 4L 4H Simbol
si puterea nominala la APP in kW
până la 48 până la 92 80 la 185 - 150 la 350 -
Puncte de cuplare superioare
19 0 25,5 0 31,75 0 45 0 45 0 D1 Diametrul bolţului de cuplare
-0,008 -0,13 -0,2 -0,8 -0,8
b1 LăŃimea sferei max. 44 max. 51 max. 51 max. 64 max. 64
b2 Distanta la orificiul splintului min. 76 min. 93 min. 102 min. 140 min. 140
d Diametrul orificiului splintului min. 12 min. 12 min. 12 min. 17,5 min. 17,5
Puncte de cuplare inferioare
22,4 +0,25 28,7 +0,3 37,4 +0,35 51 +0,5 51 +0,5 d2 Diametrul orificiului bolŃului de cuplare 0 0 0 0 0
35 0 45 0 45 0 57,5 0 57,5 0 b3 LăŃimea sferei
-0,2 -0,2 -0,2 -0,5 -0,5 l1 Distanta laterala de la punctul
de cuplare inferior la axa de simetrie a tractorului
359 435 505 610 sau 612
610 sau 612
l2 Mişcarea laterala a punctului de cuplare inferior
min. 100 min. 125 min. 125 min. 130 min. 130
L Distanta la capătul prizei de putere la centrul punctului de cuplare inferior cu bara inferioara in poziŃie orizontala
500 la 575 550 la 625 575 la 675 575 la 675
610 la 670
h ÎnălŃimea la jugul de cuplare 460 ± 1,5 610 ± 1,5 685 ± 1,5 685 ± 1,5 1000 ± 1,5
Dimensiunile şi poziŃia triunghiului de cuplare D, E, F al maşinii la tiranŃii
mecanismului de suspendare (reciprocă şi faŃă de planul de simetrie al maşinii) rezultă

108
din figura 9.5, iar valorile concrete ale acestor parametri, conform normelor ISO 730-
1, pentru cele 4 categorii de mecanisme de suspendare sunt date în tabelul 9.3. Tabel 9.3. Dimensiunile şi poziŃiile boŃurilor de cuplare ale triunghiului de cuplare a cadrului maşinii
la mecanismul de suspendare ale tractorului Dimensiuni Denumire Categ. 1 Categ. 2 Categ. 3 Categ. 4
D1 Diametru bolŃ tirant superior
19 25,5 31,75 45
D2 Diametru bolŃ tirant inferior
22 28 36,6 50,8
d Diametrul găurii pentru ştift asig.
12 12 12 17,5
b1 Garda minimă la sol a jugului
44,5 52 52 65
b2 LăŃimea maximă a jugului
69 86 95 132
b3 DistanŃa minimă până la gaura ştift
39 49 52 68
l LăŃime deschidere jug
683 825 965 1166,5
h ÎnălŃime jug 460 610 685 1100
Standardele şi normele internaŃionale mai prevăd corelări ale poziŃiei capetelor
tiranŃilor (cota L din fig. 9.6) faŃă de arborele prizei de putere: Cat. 1: L = 500...575
mm; Cat. 2: L = 550...625 mm; Cat. 3: L = 575...675 mm; Cat. 4: L =610...670 mm. De
asemenea, în standarde mai sunt prevăzute şi alte restricŃii din punct de vedere
cinematic.
Fig. 9.6. PoziŃia capetelor tiranŃilor inferiori faŃă de arborele prizei de putere (distanŃa L):
1 – tirant inferior; 2 – tirant superior; 3 – arborele prizei de putere

109
Fig. 9.7. DistanŃa de convergenŃă orizontală (a) şi verticală (b) a barelor mecanismelor de suspendare
în 3 puncte
Din punct de vedere cinematic, în planele vertical-longitudinal şi, respectiv,
transversal-orizontal, mecanismul de suspendare spaŃial 3D reprezintă două
mecanisme patrulatere distincte care au puncte de oscilaŃie (centre instantanee de
rotaŃie-CIR) în plan vertical OV şi în plan orizontal OH şi distanŃe de convergenŃă
distincte (fig. 9.7). DistanŃele de convergenŃă se măsoară de la capetele de cuplare la
maşină a barelor (tiranŃilor) mecanismului până la centrul instantaneu de rotaŃie verticală OV (distanŃa de convergenŃă verticală VOL ) şi orizontal OH (distanŃa de
convergenŃă orizontală HOL ). În conformitate cu normele ISO 730-1 se recomandă ca
distanŃa de convergenŃă orizontalăHOL să aibă următoarele valori pentru cele 4
categorii:
Categoria 1: 1700...2400 mm;
Categoria 2: 1800...2400 mm;
Categoria 3: 1900...2700 mm;
Categoria 4: 1900...2800 mm.
U9.5 ACłIONAREA MECANISMELOR DE SUSPENDARE
Pentru acŃionarea mecanismelor de suspendare se utilizează instalaŃii
hidrostatice. Acestora li se impun următoarele condiŃii:
• ridicarea maşinii din poziŃia de lucru în cea de transport;

110
• coborârea maşinii din poziŃia de transport în poziŃia de lucru;
• menŃinerea (blocarea) maşinii în orice poziŃie intermediară, între poziŃiile
limită superioară şi inferioară;
• asigurarea posibilităŃii urmăririi de către maşină, în timpul
lucrului, a denivelărilor terenului, atunci când maşina este
prevăzută cu roŃi de sprijin (copiere);
• asigurarea menŃinerii parametrilor de lucru ai maşinii, reglaŃi
iniŃial (adâncimea de lucru, înălŃimea de tăiere, poziŃia maşinii în
raport cu corpul tractorului etc.), indiferent de modificarea
condiŃiilor de lucru.
După modul de plasare al elementelor componente, instalaŃiile hidrostatice de
acŃionare a mecanismelor de suspendare se clasifică în două tipuri:
– instalaŃii monobloc, la care elementele componente ale instalaŃiei sunt
montate într-un carter comun, iar acesta se montează separat pe tractor;
– instalaŃii cu elemente dispersate, la care cilindrul hidraulic este plasat în
exterior şi acŃionează direct braŃul de ridicare al mecanismului de
suspendare.
Elementele componente ale instalaŃiei hidraulice sunt legate într-un circuit
propriu, schema hidraulică de acŃionare a mecanismelor de suspendare fiind în
principiu asemănătoare.
Fig. 9.8. Mecanism de suspendare cu cilindru hidraulic comandat de la un distribuitor hidraulic cu 4 căi şi 4 poziŃii (4/4)
În figura 9.8 este prezentată schema unei instalaŃii hidraulice care cuprinde
legăturile circuitelor hidraulice dintre rezervorul de ulei 1, filtrul 2, pompa hidraulică
3, distribuitorul hidraulic 5 (cu patru căi: A, B, P, T şi patru poziŃii: neutră N, ridicare

111
R, coborâre C şi flotantă F), cilindrul hidraulic 6 (cu dublu efect), la care se adaugă
supapa de siguranŃă 4. Pornind de la această schemă se prezintă modul de funcŃionare
a instalaŃiei hidraulice, care asigură patru comenzi distincte (corespunzător celor 4
poziŃii ale distribuitorului hidraulic). Comanda (poziŃia) neutră, N. InstalaŃia hidraulică funcŃionează în gol, uleiul
parcurge un circuit de joasă presiune între rezervorul 1 – filtrul 2 – pompa 3 –
distribuitorul 5 – rezervorul 1, cilindrul hidraulic 6 fiind inactiv. Trecerea uleiului de la
distribuitorul 5 la cilindrul 6, şi invers, este întreruptă. Ca urmare, pistonul este blocat
în cilindru. Utilajul agricol este menŃinut într-o poziŃie fixă faŃă de corpul tractorului,
de exemplu, în poziŃie de transport.
Comanda de ridicare, R. InstalaŃia hidraulică lucrează în sarcină. Pompa
aspiră ulei din rezervor şi îl trimite sub presiune spre distribuitor, de unde este dirijat la
cilindrul de forŃă (hidraulic), prin conducta AA’. Se realizează, astfel, un circuit de
înaltă presiune între pompa 3 – distribuitorul 5 – conducta AA’, cilindrul hidraulic 6.
Sub acŃiunea uleiului sub presiune, pistonul cilindrului hidraulic este deplasat în cursa
utilă, executând comanda de ridicare a maşinii agricole. Uleiul aflat în partea opusă a
pistonului se întoarce în rezervor pe un circuit de joasă presiune: conducta B’B –
distribuitorul 5 – rezervorul 1.
Comanda de coborâre, C (coborâre forŃată). FuncŃionarea instalaŃiei
hidraulice este similară comenzii de ridicare, cu deosebirea că sensul de mişcare a
pistonului în cilindrul hidraulic este inversat ca urmare a trimiterii uleiului sub
presiune prin conducta BB’.
Comanda flotantă, F. Ca şi în cazul comenzii neutre, instalaŃia hidraulică
funcŃionează în gol. Se realizează, astfel, un circuit de joasă presiune: rezervorul 1 –
filtrul 2 – pompa 3 – distribuitorul 5 – rezervorul 1. Legătura distribuitorului cu
cilindrul hidraulic este însă liberă. Astfel, uleiul poate trece liber de la cilindru la
distribuitor şi invers, sau spre rezervor, iar pistonul se poate mişca liber în cilindru
(este „flotant”), permiŃând oscilaŃiile pe verticală ale maşinii agricole.
În figura 9.9 este prezentată schema unei instalaŃii hidraulice cu cilindru
hidraulic cu simplu efect şi cu un distribuitor cu trei căi (A, P, T) şi trei poziŃii (neutră
N, ridicare R şi coborâre C). În cazul acestei scheme de acŃionare, deosebirea
funcŃională apare numai la comenzile de ridicare şi coborâre.
Comanda de ridicare, R. InstalaŃia hidraulică funcŃionează în sarcină. Lichidul de lucru din rezervorul 1 este absorbit de pompa 3 şi trimis într-un circuit sub
presiune: pompă – filtru – distribuitor – conducta AA’ – cilindru hidraulic. Sub
acŃiunea uleiului aflat sub presiune, cilindrul hidraulic realizează cursa utilă de
ridicare.

112
Fig. 9.9. Mecanism de suspendare cu cilindru hidraulic comandat de la un distribuitor
hidraulic cu 3 căi şi 3 poziŃii (3/3).
Comanda de coborâre, C (coborâre liberă). Uleiul din rezervor, aspirat de
pompă, circulă într-un circuit de joasă presiune: rezervor – filtru – pompă – distribuitor
– rezervor, pompa funcŃionând astfel în gol. Întrucât distribuitorul lasă liberă legătura
cu cilindrul hidraulic, uleiul din cilindru se reîntoarce în rezervor tot pe un circuit de
joasă presiune: cilindru – conducta A’A – distribuitor – rezervor. În acest mod, pistonul
cilindrului hidraulic se poate deplasa liber permiŃând ca maşina agricolă să coboare
liber, sub acŃiunea propriei greutăŃi.
În situaŃia în care cuplarea maşinilor la mecanismul de suspendare, aflat în
poziŃie (regim) flotant (adică uleiul din cilindrul hidraulic al mecanismului de
suspendare nu are presiune), poziŃia maşinii faŃă de corpul tractorului (de exemplu,
plugul purtat) este determinată (“controlată”) numai pe baza echilibrului forŃelor care
acŃionează asupra maşinii în procesul deplasării în lucru.
Să ne reamintim...
• Mecanismul de suspendare reprezintă un sistem de bare articulate care
serveşte pentru cuplarea la tractor a maşinilor (utilajelor) purtate.
• După numărul punctelor de cuplare la tractor, mecanismele de suspendare
pot fi: în patru puncte, în trei puncte şi în două puncte.
• Mecanismele de suspendare în trei puncte au obŃinut cea mai largă
răspândire, fiind utilizate, în prezent, la toate tractoarele agricole. Aceste
mecanisme realizează o legătură articulată în trei puncte, atât la tractor cât şi
la maşina agricolă, cu ajutorul a trei bare, denumite tiranŃi.
• Mecanismele de suspendare în 3 puncte utilizate la tractoarele agricole sunt

113
standardizate pe plan naŃional şi internaŃional, conform normelor SR ISO
730-1. În funcŃie de valoarea puterii dezvoltată de tractor la priza de putere
sunt patru categorii de mecanisme de suspendare.
U9.6. Rezumat
În cadrul acestei unităŃi de învăŃare au fost prezentate aspecte legate de rolul,
construcŃia şi funcŃionarea mecanismelor de suspendare ale tractoarelor.
S-a pus accent pe mecanismele de suspendare în 3 puncte. Se fac
exemplificări variate, însoŃite de detalii funcŃionale. S-au prezentat parametrii
constructivi şi funcŃionali standardizaŃi ai mecanismelor de suspendare în 3 puncte.
A fost prezentată acŃionarea hidraulică a mecanismelor de suspendare în 3
puncte cu distribuitor cu 4 căi şi 4 poziŃii, respectiv cu distribuitor cu 3 căi şi 3
poziŃii.
U9.7. Test de autoevaluare
1. În figura de mai sus poziŃiile 1, 2, 3 şi 5 reprezintă în ordine:
a) arbore de antrenare; tiranŃi superiori; tiranŃi verticali; tirant central.
b) arbore de antrenare; braŃe de ridicare; tiranŃi verticali; tirant central.
c) arbore de antrenare; tiranŃi superiori; braŃe reglabile de ridicare; tirant central.
2. Punctele de cuplare la tractor sunt (v. schema de mai sus):
a) A, B, C;
b) E, F, G;

114
c) F, G;
d) A, B.
3. Dimensiunile căror articulaŃii sunt standardizate (v. schema de mai sus):
a) A, B, C;
b) E, F, G;
c) toate (A, B, C, E, F, G);
d) niciuna.
4) În figura de mai sus, poziŃia „F” a distribuitorului 5 corespunde:
a) poziŃiei de ridicare;
b) poziŃiei de coborâre forŃată;
c) poziŃiei de oscilaŃie liberă pe verticală a maşinii;
d) poziŃiei de transport.
Răspunsuri:
1) b; 2) a; 3) b; 4) c.

115
Unitatea de învăŃare 10. Caracteristica teoretică de tracŃiune a tractoarelor
Cuprins
U10.1. Introducere...................................................................................................... 115
U10.2. CompetenŃe..................................................................................................... 115
U10.3. Definirea caracteristicii de tracŃiune............................................................... 116
U10.4. Modelarea matematică a caracteristicii externe a motorului de tractor.......... 117
U10.5. Determinarea forŃei motoare şi a forŃei de tracŃiune....................................... 121
U10.6. Modelarea matematică a interacŃiunii sistemului de rulare cu solul .............. 121
U10.7. Determinarea vitezei reale de deplasare a tractorului..................................... 125
U10.8. Determinarea puterii de tracŃiune ................................................................... 126
U10.9. Determinarea consumului specific de combustibil, raportat la
puterea de tracŃiune.......................................................................................... 126
U10.10. Determinarea pe cale analitică a randamentului de tracŃiune a tractorului . 126
U10.11. Alegerea şi determinarea vitezelor tractorului ............................................. 127
U10.12 Determinarea greutăŃii tractorului ................................................................. 133
U10.13 Metoda grafoanalitică de trasare a caracteristicii teoretice de tracŃiune ....... 135
U10.14. Rezumat........................................................................................................ 141
U10.15. Test de autoevaluare a cunoştinŃelor .......................................................... ..142
U10.1. Introducere
În cadrul acestei unităŃi de învăŃare se prezintă principiile teoretice de
determinare a caracteristicii de tracŃiune a tractoarelor cu transmisie mecanică,
precum şi o metodă grafoanalitică de trasare a acestei caracteristici.
Prin caracteristică de tracŃiune se înŃelege variaŃia vitezei reale, a puterii de
tracŃiune, a consumului specific de tracŃiune şi a consumului orar de combustibil în
funcŃie de forŃa de tracŃiune.
U10.2. CompetenŃele unităŃii de învăŃare
După parcurgerea materialului acestei unităŃi de învăŃare studenŃii vor fi
capabili:
• să poată determina forŃa de tracŃiune şi forŃa motoare pentru orice treaptă a
tractorului;
• să cunoască principiile care stau la baza modelării interacŃiunii sistemului de
rulare cu solul;
• să se familiarizeze cu metodica de construire a caracteristicii de tracŃiune a

116
tractorului pe cale grafoanalitică;
• să posede suficiente cunoştinŃe pentru realizarea unui model de determinare a
caracteristicii de tracŃiune pe cale analitică, indiferente de tipul acestuie (pe roŃi
4×2, 4×4 sau pe şenile);
• să poată interpreta calităŃile de tracŃiune şi economice ale tractorului, pornind de
la caracteristica de tracŃiune.
Durata medie de parcurgere a acestei unităŃi de învăŃare este de 4 ore.
U10.3 Definirea caracteristicii de tracŃiune
CalităŃile de tracŃiune şi economice ale tractorului pentru regimul nominal şi, de
asemenea, pentru toate regimurile diferite de acesta se determină cu ajutorul caracteristicii de
tracŃiune. Caracteristica de tracŃiune (sau diagrama de tracŃiune) se construieşte în funcŃie de
forŃa de tracŃiune Ft, paralelă cu solul, (respectiv forŃa motoare Fm), pentru cazul exploatării
tractorului pe un teren orizontal, într-un regim stabilizat (v = const.). Ea cuprinde
reprezentarea grafică a următoarelor funcŃii: )(1 tFfδ = - patinarea în funcŃie de forŃa de tracŃiune;
)(2 tFfv = - viteza reală în funcŃie de forŃa de tracŃiune;
)(3 tt FfP = - puterea de tracŃiune în funcŃie de forŃa de tracŃiune;
)(4 tt Ffc = - consumul specific de combustibil, raportat la puterea de tracŃiune, în
funcŃie de forŃa de tracŃiune.
La aceste curbe se mai adaugă, adesea, curba consumului orar de combustibil: )(5 tFfC = . Cu excepŃia patinării, toate celelalte mărimi depind de treapta de viteză şi, de
aceea, curbele lor de variaŃie se trasează pentru fiecare treaptă. Caracteristica de tracŃiune
depinde de tipul tractorului, de parametrii lui constructivi şi de exploatare şi de felul terenului:
beton, drum de pământ, mirişte, ogor etc.
De obicei, caracteristica de tracŃiune se utilizează pentru ilustrarea rezultatelor
încercărilor efectuate în condiŃii reale de drum sau de câmp, în care caz se numeşte
caracteristică de tracŃiune experimentală. Caracteristica de tracŃiune construită pe cale
analitică şi grafo-analitică se numeşte teoretică.
În continuare, se prezintă metodica de obŃinere a caracteristicii (diagramei) teoretice
de tracŃiune.
Pentru construcŃia acestei caracteristici sunt necesare următoarele date:
• condiŃii agrotehnice impuse tractorului: condiŃiile de exploatare ale tractorului
(drumurile şi solurile tipice, caracteristicile lor fizico-mecanice), sistema de maşini

117
şi utilaje cu care va lucra (forŃele lor de rezistenŃă), gama vitezelor lente, de lucru şi
de transport, ponderea puterii transmisă prin priza de putere etc.;
• date pentru calculul de tracŃiune al tractorului ce se proiectează: greutatea tractorului
(de exploatare şi de aderenŃă), tipul mecanismului de propulsie (pe roŃi sau pe
şenile), raza roŃilor motoare, numărul şi valoarea vitezelor teoretice de deplasare,
randamentul ansamblurilor transmisiei;
• caracteristica de regulator a motorului. În cazul montării pe tractorul ce se
proiectează a unui motor nou, caracteristica lui se obŃine prin metodele din teoria
motoarelor, iar în cazul utilizării unui motor din producŃia de serie, se foloseşte
caracteristica acestuia obŃinută pe standul de probă;
• caracteristica patinării sistemului de propulsie. Dacă există prototipul tractorului ce
se proiectează, din aceeaşi clasă de tracŃiune cu un sistem de propulsie asemănător
şi cu o greutate apropiată, se utilizează curba patinării obŃinută prin încercările de
tracŃiune. Dacă însă la proiectare nu există un tractor asemănător, atunci curba
patinării se obŃine prin metode analitice.
U10.4 Modelarea matematică a caracteristicii externe a motorului de tractor
Dacă există caracteristica de turaŃie (caracteristica externă) a motorului montat pe
tractorul a cărui caracteristică de tracŃiune se determină, atunci prin diverse metode
matematice (de exemplu, prin metoda Regresiei polinomiale din MathCAD) se obŃine
expresia analitică a curbelor: Me = f(n) – momentul efectiv, funcŃie de turaŃie; Pe = f(n) –
puterea efectivă, funcŃie de turaŃie; c = f(n) – consumul specific de combustibil, funcŃie de
turaŃie; C = f(n) – consumul orar de combustibil, funcŃie de turaŃie. Dacă pentru motorul
folosit nu sunt date experimentale, caracteristica acestuia se obŃine pe cale analitică, folosind
una sau mai multe din metodele următoare.
În lucrarea [5], pentru ridicarea caracteristicii de turaŃie în coordonate relative
(adimensionale) la motoare cu aprindere prin comprimare, se recomandă folosirea relaŃiei
următoare:
,
32
max
−
+=
pppe
e
n
nc
n
nb
n
na
P
P (10.1)
în care:
np = nn este turaŃia puterii maxime Pe max = Pn;
a, b, c - coeficienŃi care iau valorile din tabelul 10.1.

118
Tabelul 10.1
Valorile coeficienŃilor din relaŃia (10.1)
Tipul camerei de ardere a b c
Cameră unitară de ardere 0,5 1,5 1,0
Cameră separată de preardere 0,7 1,3 1,0
Cameră separată de vârtej 0,6 1,4 1,2
Tabelul 10.2
RelaŃii de calcul pentru puterea efectivă Pe Tipul motorului RelaŃia de calcul
Cu aprindere prin scânteie
−+=
2
1nnn
nen
n
n
n
n
nPP
Cu aprindere prin comprimare: cu injecŃie directă
−+=
2
13,187,0nnn
nen
n
n
n
n
nPP
cu antecameră
−+=
2
4,16,0nnn
nen
n
n
n
n
nPP
cu cameră de turbionare
−+=
2
3,17,0nnn
nen
n
n
n
n
nPP
Pn - puterea nominală; nn - turaŃia nominală; Pe şi n - puterea efectivă şi, respectiv, turaŃia într-un anumit punct al caracteristicii.
RelaŃii de aceeaşi formă cu relaŃia (10.1), însă cu alte valori ale coeficienŃilor a, b, c
sunt date în lucrările [1, 8], precum şi în multe alte lucrări, şi sunt prezentate în tabelul 10.2.
În alte lucrări, printre care [29], curba puterii este, de asemenea, aproximată cu o
parabolă de gradul trei:
,
3
3
2
21
+
+=
nnn
nen
nα
n
nα
n
nαPP (10.2)
iar curba momentului efectiv de torsiune la arborele cotit se aproximează, în consecinŃă, cu o
parabolă de gradul doi:
,
2
321
++=
nn
nen
nα
n
nααMM (10.3)
unde α1, α2 şi α3 sunt astfel determinaŃi, încât funcŃiile de mai sus să aproximeze cât mai bine
caracteristica externă obŃinută pe cale experimentală. Valorile acestor coeficienŃi depind de
coeficientul de elasticitate ce = nm / nn şi de adaptabilitate ca = Mm / Mn (unde nm este turaŃia
corespunzătoare momentului maxim Mm) şi se pot obŃine folosind relaŃiile:

119
( )
( );
1
122
2
1−
−−=
e
eae
c
cccα
( )( )
;1
1222 −
−=
e
ae
c
ccα
( ).
1
123
−
−−=
e
a
c
cα (10.4)
Între aceşti coeficienŃi există relaŃia: .1321 =++ ααα
În lucrarea [30] sunt prezentate relaŃii mai simple pentru coeficienŃii α (în funcŃie numai de coeficientul de elasticitate ce):
( )
;12
431
e
e
c
cα
−
−=
( );
12
22
e
e
c
cα
−=
( ).
12
13
ecα
−−= (10.5)
Pe ramura de regulator a caracteristicii de turaŃie a motorului, dependenŃa Me = f(n) se
consideră, în general, liniară (dreaptă ce trece prin punctele de coordonate (nn, Mn) şi (ng, 0))
şi, prin urmare,
,ng
gne nn
nnMM
−
−= (10.6)
în care:
ng este turaŃia de mers în gol a motorului (turaŃia maximă a arborelui cotit),
ng = (1,06…1,1)nn;
nn - turaŃia nominală a motorului.
Pentru determinarea consumului specific de combustibil există, de asemenea,
numeroase expresii analitice. În lucrarea [2], de exemplu, în cazul funcŃionării motorului pe
ramura caracteristicii necontrolată de regulator, se recomandă următoarea relaŃie:
,193,1
2
+
−=
nn
nω
ω
ω
ωcc
care este echivalentă expresiei:
,193,1
2
+
−=
nn
nn
n
n
ncc (10.7)
unde cn este consumul specific de combustibil, corespunzător puterii nominale, în g/(kWh).
Pentru motoarele diesel cu injecŃie directă, curba consumului specific de combustibil
este descrisă mai precis de funcŃia [1,8]:
.55,155,1
2
+−=
nn
nn
n
n
ncc (10.8)
Consumul specific de combustibil la regimul nominal poate fi determinat, în mod aproximativ, cu relaŃia min05,1 ccn ⋅= , în g/(kWh).
Pe ramura necontrolată de regulator a caracteristicii de turaŃie, consumul orar de
combustibil, în kg/h, se determină cu relaŃia:

120
.10 3ecPC −= (10.9)
Fig. 10.1. Caracteristica de regulator a motorului.
Pe ramura de regulator a caracteristicii motorului, consumul orar de combustibil are o
variaŃie liniară în funcŃie de turaŃie. Pentru a determina expresia analitică a funcŃiei C = f(n) se
foloseşte figura 10.1. În acest scop, se scriu ecuaŃiile dreptelor AB şi CD:
;ng
n
ng
n
CC
CC
nn
nn
−−
=−−
.0 n
ne
ng
n
P
PP
nn
nn
−−
=−−
Prin urmare,
.n
en
ng
n
P
PP
CC
CC −=
−−
Aplicând una din proprietăŃile proporŃiilor, se obŃine:
,e
en
g
n
enn
en
nng
n
P
PP
CC
CC
PPP
PP
CCCC
CC −=
−−
⇔+−
−=
+−−−
de unde
( ) ( )⋅−−
−=−−
+= ene
gnen
e
gn PP
P
CCCPP
P
CCCC
Rezultă că, pe ramura controlată de regulator a caracteristicii motorului, consumul orar
de combustibil se determină cu relaŃia:
.en
gng P
P
CCCC
−+= (10.10)
Pentru un motor dat, ./)( constPCCm ngn =−= şi reprezintă coeficientul unghiular al
dreptei AB. Dacă consumul orar gC la mersul în gol al motorului nu se cunoaşte, se poate
adopta ( ) ng CC 35,0...25,0= [23], deci ( ) nn PCm 75,0...65,0= [kg/(kWh)], iar
Cn/Pn = cn/1000.
Consumul specific de combustibil, în g/(kWh), pe ramura de regulator se determină cu
relaŃia: .103
ePCc = (10.11)

121
U10.5 Determinarea forŃei motoare şi a forŃei de tracŃiune
În cazul deplasării tractorului pe un teren orizontal, într-un regim stabilizat (v = const.),
bilanŃul de tracŃiune al tractorului are următoarea formă:
,r
ηiMRFF trtre
rtm =+= (10.12)
de unde se obŃine ,2 fGMKF et −=
în care:
K2 este coeficientul unghiular al dreptei Ft = f(Me),
t
tr
m
trtrtr
v
ωη
rω
ωη
r
ηiK ===2 [m-1];
ω - viteza unghiulară a arborelui cotit, în s-1;
itr - raportul total de transmitere al transmisiei;
ηtr - randamentul total al transmisiei;
vt - viteza teoretică de deplasare a tractorului, în m/s;
Me - momentul efectiv al motorului, în Nm;
Rr = fG - rezistenŃa la rulare la deplasarea tractorului, în N.
Aşadar, forŃa de tracŃiune , la o treaptă oarecare “j”, se calculează cu relaŃia:
.30 ,
, fGMv
nF e
jtn
trnjt −⋅⋅=
ηπ (10.13)
U10.6 Modelarea matematică a interacŃiunii sistemului de rulare cu solul
CalităŃile de tracŃiune ale tractoarelor sunt evaluate, mai ales, cu ajutorul valorii forŃei
tangenŃiale de tracŃiune. Această forŃă apare în procesul interacŃiunii sistemului de rulare al
tractorului cu solul (drumul) şi depinde de foarte mulŃi factori. De exemplu, în cazul
tractoarelor pe roŃi, depinde de: tipul tractorului (4×2 sau 4×4), greutatea aderentă, tipul
pneurilor şi parametrii acestora (diametrul, lăŃimea, presiunea aerului din pneuri, înălŃimea
pintenilor, pasul acestora, desenul anvelopelor), proprietăŃile fizico-mecanice ale solului,
patinarea sistemului de rulare cu solul.
Pentru determinarea analitică a patinării tractoarelor pe roŃi, s-au propus numeroase
expresii. Găsirea unui argument, în funcŃie de care să fie exprimată patinarea, este o problemă
dificilă, întrucât procesul interacŃiunii sistemului de rulare cu solul este deosebit de complex.
De aceea, în prezent, o importanŃă considerabilă în studierea aderenŃei, deci şi a patinării, o au
cercetările experimentale.
Mărimea care caracterizează cel mai complet patinarea tractoarelor pe roŃi este forŃa
motoare specifică, definită prin raportul dintre forŃa motoare Fm şi greutatea aderentă Ga:
,Gλ
F
G
Fφ
m
m
a
mm ==

122
în care:
λm este coeficientul greutăŃii aderente (în calculul de tracŃiune se adoptă λm = 0,8,
pentru tractoare 4×2 şi λm = 1, pentru tractoare 4×4);
G - greutatea totală a tractorului.
Între forŃa motoare specifică şi forŃa de tracŃiune specifică, ϕt = Ft / Ga , există
următoarea dependenŃă:
m
tm
tm
f
G
fGF
λϕ
λϕ +=
+= sau .
mmt
f
λϕϕ −=
unde f este coeficientul de rezistenŃă la rulare.
Mărimea ϕm variază de la ϕm = 0, când Fm = 0, până la ϕm max = ϕ, valoare corespunzătoare patinării totale, δ = 1, cunoscută sub denumirea de coeficient de aderenŃă.
Făcându-se o sinteză a mai multor lucrări, în lucrarea [23] se propune ca la
determinarea analitică a patinării să se plece de la următoarea premisă (fig. 10.2):
• în intervalul 0 ≤ ϕm≤ 0,5ϕ funcŃia δ = f(ϕm) are un pronunŃat caracter liniar,
având ecuaŃia de forma δ = mϕm, m fiind coeficientul unghiular al dreptei;
• în intervalul 0,5 < ϕm≤ ϕ funcŃia δ = f(ϕm), are un pronunŃat caracter hiperbolic,
având ecuaŃia de forma δ (ϕ’ - ϕm) = const. (unde ϕ’ este punctul de abscisă în care funcŃia creşte asimptotic). În general, eroarea nu depăşeşte 2…4%, dacă se adoptă
ϕ’≅ ϕ. Cu o precizie suficientă pentru practică, se obŃine o singură funcŃie δ = f(ϕm), pentru
tot domeniul de variaŃie a argumentului ϕm. Această funcŃie este de forma:
,2
m
mm
φD
φBφAδ
−−
= (10.14)
în care: ;4
3 φmA = ;
2
mB = .
4'
2φmφφD +==
Fig. 10.2. Expresia analitică a curbei patinării, pentru tractoarele pe roŃi.

123
Formulele pentru coeficienŃii A, B, D din relaŃia (10.14) au fost obŃinute punând
condiŃia ca funcŃia căutată să satisfacă simultan coordonatele punctelor M1 şi M2 (v. fig. 10.2).
Aşadar, pentru exprimarea analitică a patinării, este suficient să se cunoască
coeficientul unghiular m al dreptei şi coeficientul de aderenŃă ϕ, adică argumentul ϕm
corespunzător patinării totale. RelaŃia menŃionată prezintă avantaje considerabile atunci când
există date experimentale referitoare la tractorul care se cercetează sau asupra unor tractoare
apropiate acestuia.
Următoarele funcŃii exponenŃiale, utilizate, mai ales, pentru tractoarele industriale,
descriu, cu o precizie foarte bună pentru practică, patinarea tractoarelor pe roŃi şi pe şenile:
- pentru tractoare pe roŃi
;11max
11,0
max
+
−−=
m
m
m
mϕ
ϕ
ϕϕ
δ (10.15)
- pentru tractoare pe şenile
.)1(1 05,0
maxt
t
ϕϕ
δ −−= (10.16)
Pentru mirişte, rezultate foarte bune dă folosirea relaŃiilor:
- pentru tractoare pe roŃi
;06,31
246,03t
t
ϕϕ
δ−
= (10.17)
unde 65,00 ≤≤ tϕ , ceea ce corespunde patinării ;10 ≤≤ δ
- pentru tractoare pe şenile
⋅−
=2377,11
0333,0
t
t
ϕϕ
δ (10.18)
unde 84,00 ≤≤ tϕ , ceea ce corespunde, ca şi în cazul tractoarelor pe roŃi, patinării 0≤δ≤1.
Tabelul
10.3
CoeficienŃii de rezistenŃă la rulare şi de aderenŃă pentru tractoare pe roŃi Coeficientul de aderenŃă, ϕ
Felul drumului sau solului Coeficientul de rezistenŃă
la rulare, f SuprafaŃă uscată
SuprafaŃă umedă
0,02
0,7…0,9
0,5…0,7
0,02 0,8…1,0 0,5…0,8
0,02…0,04 0,6…0,7 0,3…0,4
0,04 0,7…0,8 0,3…0,4
0,05 0,6…0,7 0,3…0,45
Drum:
asfaltat
betonat
pavat
de pământ, pe sol argilos
de pământ, pe sol nisipos
de zăpadă, bătătorit 0,03…0,05 0,2…0,4 -

124
0,07…0,09
0,7…0,8
0,5…0,6
FâneaŃă:
cosită
necosită 0,08…0,10 0,6…0,7 0,4…0,5
łelină (teren virgin),
pârloagă compactă 0,05…0,07 0,7…0,9 -
Pârloagă (de 2…3 ani),
pajişte cosită 0,06…0,08 0,6…0,8 -
Mirişte după cereale păioase 0,08…0,10 0,6…0,85 0,5
Arătură aşezată 0,12…0,14 0,4…0,6 -
0,18…0,22
0,3…0,5
-
Câmp:
arat proaspăt
prelucrat cu cultivatorul 0,16…0,20 0,4…0,6 -
0,10…0,15
-
0,4…0,6
Nisip:
umed
uscat 0,16…0,22 0,2…0,3 -
Mlaştină înierbată 0,20…0,25 - 0,2…0,25
Strat gros de zăpadă (0,4 m) 0,18…0,20 - 0,2…0,25
Tabelul 10.4
CoeficienŃii de rezistenŃă la rulare şi de aderenŃă pentru
tractoarele pe şenile, valori medii
Felul drumului sau solului Coeficientul de
rezistenŃă la rulare, f
Coeficientul de aderenŃă, ϕ
Asfalt 0,06 -
Drum bătătorit uscat de pământ nisipos 0,06 1,1
Drum bătătorit uscat de cernoziom 0,07 0,9
Drum bătătorit uscat de pământ argilos 0,06 1,0
FâneaŃă umedă cosită 0,08 1,2
FâneaŃă umedă necosită 0,07 0,6
łelina (teren virgin), pârloagă compactă 0,07 1,1
Pârloagă (de 2…3 ani), pajişte cosită 0,07 1,0
Mirişte 0,08 0,9
Arătură aşezată 0,08 0,7
Arătură proaspătă 0,10…0,12 0,6
Nisip umed 0,10 0,5
Nisip uscat 0,15 0,4
Mlaştină 0,10…0,12 0,3
Drum de zăpadă bătătorit 0,08 0,6

125
U10.7 Determinarea vitezei reale de deplasare a tractorului
Viteza reală de deplasare a tractorului se calculează cu relaŃia: ( ),1 δvv t −= (10.19)
în care: vt este viteza teoretică, ;trt irωv ⋅=
ω - viteza unghiulară a arborelui cotit al motorului, în s-1:
r - raza de rulare a roŃii motoare, în m;
itr - raportul de transmitere al transmisiei la o anumită treaptă.
Dacă nu sunt alte valori mai exacte, atunci, la stabilirea datelor iniŃiale de calcul, raza
roŃii motoare r, în m, poate fi determinată cu relaŃia lui Hedekel:
,2 0
0
ba
m
rrpπ
Grr −= (10.20)
în care:
r0 este raza liberă a roŃii neîncărcate (nici măcar cu greutatea proprie), în m;
Gm - sarcina verticală pe roată, în N;
pa - presiunea aerului în pneu, în Pa;
rb - raza secŃiunii transversale a pneului, în m (rb = 0,5B, adică jumătate din
lăŃimea B a pneului).
Întrucât, adesea, când se efectuează calculul de tracŃiune nu se cunosc rapoartele de
transmitere ale transmisiei şi nici raza roŃilor (este cazul etapei de proiectare), este
recomandabil ca vitezele teoretice să se calculeze avându-se în vedere că acestea depind liniar
de turaŃia arborelui cotit (fig. 10.3):
Fig.10.3. Graficul vitezei teoretice.
,n
v
n
v t
n
tn =
de unde rezultă

126
,1nKnn
vv
n
tnt =⋅=
unde ntn nvK =1 este coeficientul unghiular al dreptei (pentru o anumită treaptă de viteză).
Indicele “n” se referă la parametrii regimului nominal.
Prin urmare, viteza reală de deplasare a tractorului la treaptă oarecare “j” se determină
cu relaŃia:
( ).1, δnn
vv
n
jtnj −⋅= (10.21)
U10.8 Determinarea puterii de tracŃiune
Puterea de tracŃiune Pt, în kW, se determină cu relaŃia:
,10 3 vFP tt−= (10.22)
în care:
Ft este forŃa de tracŃiune, în N;
v - viteza reală de deplasare a tractorului, în m/s.
U10.9 Determinarea consumului specific de combustibil, raportat la puterea de
tracŃiune
Consumul specific de combustibil, raportat la puterea de tracŃiune a tractorului, se
determină folosind relaŃia sa de definiŃie:
t
tP
Cc
310= [g/(kWh)]. (10.23)
U10.10 Determinarea pe cale analitică a randamentului de tracŃiune a tractorului
Randamentul de tracŃiune al tractoarelor se determină cu relaŃia [23]:
( ) ( ) ,1111
+−−=
−−=
fGF
fGδη
F
Rδηη
t
tr
m
rtrt (10.24)
în care:
ηtr este randamentul total al transmisiei (în cazul tractoarelor pe şenile include şi
randamentul ηs = 0,95…0,97 al ramurilor motrice ale celor două şenile.
Rr - rezistenŃa la rulare a tractorului, Rr = fG;
f - coeficientul de rezistenŃă la rulare;
G - greutatea de exploatare a tractorului;
Fm - forŃa tangenŃială de tracŃiune (forŃa motoare), Fm = Ft + Rr.

127
Cu ajutorul relaŃiei (10.24) se poate trasa curba randamentului de tracŃiune în funcŃie
de forŃa de tracŃiune Ft, curbă ce reprezintă, de fapt, caracteristica potenŃială de tracŃiune a
tractorului. Această caracteristică evaluează gradul de apropiere al unei caracteristici de
tracŃiune concrete faŃă de una ideală.
Randamentul de tracŃiune ηt poate fi exprimat în funcŃie numai de mărimi
adimensionale. Pentru aceasta ultima paranteză din relaŃia (10.24), care reprezintă
randamentul care evaluează rezistenŃa la rulare a tractorului, se scrie sub forma:
⋅+
=+
−=+
−=+
−
tmm
a
ttt
φλ
ffλ
G
Ff
fGF
f
fGF
fG
1
11
/11
S-a exprimat greutatea de exploatare în funcŃie de greutatea aderentă: G = Ga / λm şi s-
a folosit relaŃia de definiŃie a forŃei de tracŃiune specifice: ϕt = Ft / Ga. Prin urmare, relaŃia
(10.24) devine:
( )
⋅+
−=
)(1
1
tm
trt φλf
δηη (10.24’)
U10.11 Alegerea şi determinarea vitezelor tractorului
În ultimele decenii, numărul treptelor de viteză ale tractoarelor, mai ales ale
tractoarelor pe roŃi, a crescut continuu, fiind uneori chiar mai mare de 40 de trepte. De
exemplu, la tractoarele Fend Favorit 800, în gama de viteze 0,4…50 km/h, sunt 44 de trepte
de viteză pentru mers înainte şi 44 pentru mersul înapoi. Şi la tractoarele pe şenile, numărul
treptelor de viteză a crescut continuu, însă într-o măsură mai mică. De exemplu, la tractorul
pe şenile Challanger (cu şenile de cauciuc), în gama de viteze 0,25…30 km/h sunt 16+9
trepte.
În prezent, la tractoarele româneşti pe roŃi se folosesc următoarele numere de trepte de
viteză (mers înainte + mers înapoi): 6+2; 8+2; 10+2; 9+3; 12+3; 16+4.
Tabelul 10.5
Clasificarea treptelor de viteză ale tractoarelor agricole,
după valoarea vitezei, în km/h
Tipul tractorului Felul treptei
Pe roŃi Pe şenile
Lente / superlente, tehnologice Până la 3,5 Până la 3,5
De rezervă 3,5…7 3,5…5
De lucru 7…12 sau 7…15 5…9
De transport 12…50 sau 15…50 9…12
În tabelul 10.5 este dată clasificarea vitezelor tractoarelor după valoarea şi utilizarea
lor.

128
Vitezele de lucru se folosesc la executarea principalelor lucrări agricole: arat, semănat,
întreŃinerea culturilor, recoltat etc. Se recomandă ca tractoarele pe roŃi să aibă în intervalul de
viteze 4…12 km/h cel puŃin 6 trepte.
Vitezele de rezervă se utilizează temporar pentru învingerea unor forŃe de rezistenŃă
care depăşesc (ocazional) cu mult valoarea rezistenŃelor de lucru. ForŃa de tracŃiune la aceste
viteze este limitată de aderenŃa tractorului cu solul.
Vitezele lente (tehnologice) au valori limitate de condiŃiile de lucru şi nu de necesitatea
obŃinerii unor forŃe mari de tracŃiune; de regulă la aceste viteze, puterea motorului nu este
folosită complet. Prin urmare, la aceste trepte motorul poate funcŃiona la sarcini parŃiale, cu o
reducere a turaŃiei de până la 40%. Aşadar, în acest caz, valoarea vitezei maxime la aceste
trepte corespunde unei turaŃii a motorului de 0,6nn (subliniem încă o dată: dacă aceste viteze
sunt obŃinute atât cu ajutorul transmisiei, cât şi prin reducerea turaŃiei motorului). Vitezele
lente se folosesc când tractorul lucrează în agregat cu maşini de plantat răsaduri, de plantat
puieŃi (la împăduriri), la unele lucrări de îmbunătăŃiri funciare etc.
Vitezele de transport se folosesc pentru deplasarea în gol a tractorului sau pentru
tractarea remorcilor şi a semiremorcilor pe drumuri de pământ sau pe şosele.
Vitezele de deplasare ale tractorului depind de tipul tractorului, de felul lucrării, iar la
alegerea lor trebuie să se aibă în vedere şi condiŃiile agrotehnice. În tabelul 10.6 sunt date
valorile vitezelor recomandate pentru diferite lucrări agricole.
În intervalul vitezelor (vmin…vmax), vitezele intermediare, adică structura vitezelor, se
stabilesc prin mai multe metode: metoda progresiei geometrice, a progresiei aritmetice, a
seriei armonice, a seriei economice, tratate pe larg în lucrarea [24]. Creşterea numărului de
trepte a determinat folosirea cutiilor de viteze compuse, iar aceasta a impus, la rândul său,
folosirea, aproape în exclusivitate, a progresiei geometrice.
Tabelul 10.6
Vitezele reale de deplasare pentru diferite lucrări agricole Viteza Denumirea lucrării
m/s km/h
Arat 1,1…2,5 4…9
Grăpat 1,4…2,8 5…10
CultivaŃie totală 1,4…2,8 5…10
Tăvălugit 1,9…3,3 7…12
Semănatul cerealelor păioase 1,9…2,5 7…9
Semănatul culturilor prăşitoare 1,4…2,5 5…9
Plantatul răsadurilor 0,1…0,3 0,5…1,0
Plantatul tuberculilor 0,7…1,5 2,5…5,5
Prăşitul culturilor 1,1…2,5 4…9
Recoltatul cerealelor păioase şi al porumbului 0,8…2,8 3…10
Recoltatul furajelor 0,8…3,3 3…12

129
Recoltatul sfeclei şi al cartofului 0,7…2,2 2,5…8
Recoltatul legumelor 0,7…2,2 2,5…8
Recoltatul plantelor textile 0,8…2,8 3…10
Transportul produselor 2,2…6,9 8…25
În intervalul de viteze adoptat în funcŃie de destinaŃia tractorului sau impus prin tema
de proiectare, raŃia progresiei geometrice se calculează cu relaŃia:
⋅== −− 1
max
min1
1nn
n v
v
v
vq (10.25)
Prin logaritmarea ultimei relaŃii, se obŃine numărul treptelor de viteză:
⋅+−
= 1lg
lglg maxmin
q
vvn (10.26)
Amintim că raŃia progresiei geometrice q este egală cu coeficientul minim de încărcare a motorului: ./minmin ne MMχq == Prin urmare, cu cât valoarea lui q este mai apropiată de 1,
cu atât mai mult puterea motorului poate fi folosită mai complet. În prezent, pentru vitezele de
lucru se recomandă q = 0,75…0,85, iar pentru celelalte trepte (de rezervă, lente / superlente,
de transport) q < 0,75…0,85.
Structura vitezelor în cadrul unor limite date ale vitezelor de deplasare are o
importanŃă considerabilă în exploatarea tractorului. Prin realizarea unei structuri cu o raŃie
variabilă se urmăreşte ca, folosind acelaşi număr de trepte de viteză, să se obŃină mai multe
trepte de lucru şi mai puŃine de transport şi lente, care se utilizează relativ rar.
Se notează cu qr = vi/vi+1 (unde i = 1,2,3,…n, n fiind numărul real (efectiv) al treptelor
în cutia de viteze). În cazul folosirii unei structuri de viteze cu qr ≠ const., raŃia progresiei
geometrice se calculează cu relaŃia (10.25) pentru un număr mai mare de trepte de viteză,
N>n:
⋅== −− 1
max
min1
1NN
n v
v
v
vq (10.27)
Anulând, convenabil, o parte din treptele de viteză, se obŃine o transmisie cu o
structură mai raŃională a treptelor de viteză.
În tabelele 10.7…10.13 sunt indicate câteva posibilităŃi de obŃinere a structurii
vitezelor pe care le oferă cutiile de viteze compuse de tipul (5+1)⋅2, (4+1)⋅3 şi (4+1)⋅4. În
aceste tabele nu este menŃionată structura treptelor de mers înapoi. Prin raportul dintre game
se are în vedere raportul de transmitere dintre două game consecutive. În aceste tabele, pentru
simplificarea scrierii, s-a folosit notaŃia: r = 1/q.

130
Tabelul 10.7
Structura vitezelor pentru o cutie de viteze compusă cu 10 trepte, qr = const.
Numărul treptei de viteze şi valoarea ei
1 2 3 4 5 6 7 8 9 10 Gama de viteze
v1 v1r v1r2 v1r
3 v1r4 v1r
5 v1r6 v1r
7 v1r8 v1r
9
RaŃia
vi+1/vi
I (înceată) x x x x x 1
II (rapidă) x x x x x r
I (înceată) x x x x x Varianta
2 II (rapidă) x x x x x
r
Notă: x – marchează includerea treptei în gama respectivă.
Raportul a două viteze consecutive în fiecare gamă: varianta 1: r = 1/q; varianta 2: r2 = 1/q2.
Raportul dintre game: varianta I - iI / iII = r5; varianta II - iI / iII = r.
Tabelul 10.8
Structura vitezelor pentru o cutie de viteze compusă cu 10 trepte, qr ≠ const.
Numărul treptei de viteză (calculat şi efectiv) şi valoarea vitezei
1 (2) 3 4 5 6 7 8 9 10 (11) 12
1 2 3 4 5 6 7 8 9 10
Gama de
viteze
v1 (v1r) v1r2 v1r
3 v1r4 v1r
5 v1r6 v1r
7 v1r8 v1r
9 (v1r10) v1r
11
RaŃia
vi+1/vi
I (înceată) x x x x x
II (rapidă) x x x x x r sau r2
Notă: x – marchează includerea treptei în gama respectivă.
Treptele din paranteză sunt anulate (în calculul raŃiei au fost incluse).
Raportul a două viteze consecutive în fiecare gamă: r2 = 1/q2.
Raportul dintre game: iI / iII = r3.
Tabelul 10.9
Structura vitezelor pentru o cutie de viteze compusă cu 12 trepte, qr = const.
Numărul treptei de viteză şi valoarea vitezei
1 2 3 4 5 6 7 8 9 10 11 12 Gama de
viteze v1 v1r v1r
2 v1r3 v1r
4 v1r5 v1r
6 v1r7 v1r
8 v1r9 v1r
10 v1r11
RaŃia
vi+1/vi
I (înceată) x x x x
II (normală) x x x x
III (rapidă) x x x x
r
Notă: x – marchează includerea treptei în gama respectivă.
Raportul a două viteze consecutive în fiecare gamă: r = 1/q.
Raportul dintre game: iI / iII = iII / iIII = r4.

131
Tabelul 10.10
Structura vitezelor pentru o cutie de viteze compusă cu 12 trepte, qr ≠ const.
Numărul treptei de viteză (calculat şi efectiv) şi valoarea vitezei
1 (2) 3 4 5 6 7 8 9 10 11 (12) 13 (14) 15
1 2 3 4 5 6 7 8 9 10 11 12
Gama de
viteze
v1 (v1r) v1r2 v1r
3 v1r4 v1r
5 v1r6 v1r
7 v1r8 v1r
9 v1r10 (v1r
11) v1r12 (v1r
13)v1r14
RaŃia
vi+1/vi
I (înceată) x x x x
II (normală) x x x x
III (rapidă) x x x x
r
sau
r2
Notă: Notă: x – marchează includerea treptei în gama respectivă.
Treptele din paranteză sunt anulate (în calculul raŃiei au fost incluse).
Raportul a două viteze consecutive în fiecare gamă: r2 = 1/q2.
Raportul dintre game: iI / iII = r3; iII / iIII = r
5.
Tabelul 10.11
Structura vitezelor pentru o cutie de viteze compusă cu 16 trepte, qr = const.
Numărul treptei de viteză şi valoarea vitezei
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Gama
de
viteze v vr vr2 vr3 vr4 vr5 vr6 vr7 vr8 vr9 vr10 vr11 vr12 vr13 vr14 vr15
RaŃia
vi+1/vi
I x x x x
II x x x x
III x x x x
IV x x x x
r
Notă: Notă: x – marchează includerea treptei în gama respectivă.
Pentru simplificarea scrierii, s-a notat: v1 = v (viteza la treapta 1 a cutiei de viteze
compuse).
Raportul a două viteze consecutive în fiecare gamă (vi+1/vi) : r = 1/q.
Raportul dintre game: iI / iII= iII / iIII = iIII / iIV= r4. Tabelul 10.12
Structura vitezelor pentru o cutie de viteze compusă cu 16 trepte, qr ≠ const.
Varianta 1
Numărul treptei de viteză (calculat şi efectiv) şi valoarea vitezei
1 (2) 3 (4) 5 (6) 7 8 9 10 11 12 13 14 15 (16) 17 (18) 19 (20) 21 (22) 23
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Gam
a de viteze
v (vr)
vr2
(vr3)
vr4
(vr5)
vr6
vr7
vr8
vr9
vr10
vr11
vr12
vr13
vr14
(v
r15
) vr
16
(vr1
7
) vr
18
(vr1
9
) vr
20
(vr2
1
) vr
22
I x x x x
II x x x x

132
III x x x x
IV x x x x
Varianta a 2-a
Numărul treptei de viteză (calculat şi efectiv) şi valoarea raportului de transmitere
1 (2) 3 4 5 6 7 8 9 10 11 (12) 13 (14) 15 (16) 17 (18) 19 (20) 21 (22) 23
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Gam
a de viteze
v (vr)
vr2
vr3
vr4
vr5
vr6
vr7
vr8
vr9
vr10
(vr1
1 )
vr12
(vr1
3 )
vr14
(vr1
5 )
vr16
(vr1
7 )
vr18
(vr1
9 )
vr20
(vr2
1 )
vr22
I x x x x
II x x x x
III x x x x
IV x x x x
Varianta a 3-a
Numărul treptei de viteză (calculat şi efectiv) şi valoarea raportului de transmitere
1 (2) 3 (4) 5 6 7 8 9 10 11 12 13 (14) 15 (16) 17 (18) 19 (20) 21 (22) 23
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Gam
a de viteze
v (vr)
vr2
(vr3)
vr4
vr5
vr6
vr7
vr8
vr9
vr10
vr11
vr12
(vr1
3 )
vr14
(vr1
5 )
vr16
(vr1
7 )
vr18
(vr1
9 )
vr20
(vr2
1 )
vr22
I x x x x
II x x x x
III x x x x
IV x x x x Notă: Pentru simplificarea scrierii, s-a notat: v = v1 (viteza la treapta 1 a cutiei de viteze
compuse). Treptele din paranteză sunt anulate (în calculul raŃiei au fost incluse). Raportul a două viteze consecutive în fiecare gamă (vi+1/vi): r
2 = 1/q2. Raportul a două viteze consecutive în cutia de viteze compusă (vi+1/vi): r sau r
2. Raportul dintre game: varianta 1 - iI / iII = r
7; iII/ iIII = r; iIII/ iIV= r8;
varianta 2 - iI / iII = r3; iII/ iIII = r
5; iIII/ iIV= r8;
varianta 3 - iI / iII = r5; iII/ iIII = r
3; iIII/ iIV= r8.
Tabelul 10.13
Structura vitezelor pentru o cutie de viteze compusă cu 16 trepte, qr ≠ const.
Numărul treptei de viteză (calculat şi efectiv) şi valoarea vitezei
1 (2) 3 (4) 5 6 7 8 9 10 11 12 13 14 15 16 (17) 18 (19) 20
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Gam
a de viteze
v (vr)
vr2
(vr3)
vr4
vr5
vr6
vr7
vr8
vr9
vr10
vr11
vr12
vr13
vr14
vr15
(vr1
6 )
vr17
(vr1
8 )
vr19
I x x x x

133
II x x x x
III x x x x
IV x x x x
Notă: Pentru simplificarea scrierii, s-a notat: v1 = v (viteza la treapta 1 a cutiei de viteze
compuse). Treptele din paranteză sunt anulate (în calculul raŃiei au fost incluse).
Raportul a două viteze consecutive în fiecare gamă (vi+1/vi): r2 = 1/q2.
Raportul a două viteze consecutive în cutia de viteze compusă (vi+1/vi): r sau r2.
Raportul dintre game: iI / iII = r5; iII/ iIII = r
3; iIII/ iIV= r5.
U10.12 Determinarea greutăŃii tractorului
10.12.1 Determinarea greutăŃii constructive
Prin greutate constructivă Gc se înŃelege greutatea tractorului în stare nealimentată
(fără combustibil, lubrifianŃi şi apă), fără tractorist, scule, lest şi fără utilaj şi echipament
special, dar cu tot echipamentul şi utilajul care se găseşte permanent pe tractor: cabină, priză
de putere, mecanismul de suspendare etc.
Greutatea constructivă a tractorului trebuie să fie cât mai mică pentru a se asigura o
exploatare raŃională, adică cu un randament de tracŃiune optim, într-o gamă de viteze cât mai
mare. Ea se determină din condiŃia asigurării rezistenŃei şi fiabilităŃii tractorului însuşi.
Greutatea Gc poate fi determinată în funcŃie de greutatea specifică constructivă a tractorului,
definită prin raportul gc = Gc / Pn, în N / kW:
( ) ncnncc PgPPGG == / [N], (10.28)
unde Pn este puterea nominală a motorului, în kW.
Pentru greutatea (respectiv, masa) specifică constructivă pot fi folosite valorile din
tabelul 10.14.
Intervalul mare al valorilor pentru mărimea gc se explică prin modul diferit de definire
a greutăŃii constructive, prin diversitatea destinaŃiei tractoarelor şi prin nivelul tehnic diferit
atins de producŃia de tractoare în diferite Ńări. În plus, mai trebuie menŃionat şi faptul că, din
considerente constructive şi tehnologice, acest parametru nu poate rămâne constant pentru
întreaga gamă a puterilor (la puteri mici are valori mai mari, iar pe măsură ce puterea creşte
valoarea mărimii gc se apropie de valorile inferioare din intervalul respectiv).

134
Tabelul 10.14
Valorile greutăŃii (masei) specifice constructive şi a parametrului ϕtn
Greutatea specifică
constructivă
Masa specifică
constructivă Tipul tractorului
N/kW N/CP kg/kW kg/CP
ϕtn
Pe roŃi, 4×2 0,37…0,39
Pe roŃi, 4×4 400…650 294…478 40…65 29…48
0,40…0,45
Pe şenile 550…900 404…662 55…90 40…66 0,5…0,6
Pentru tractoarele agricole pe roŃi, cu Pn ≥ 35 kW, pentru calculul greutăŃii specifice
constructive poate fi folosită relaŃia următoare, dedusă din analiza de regresie:
3
n
rc
P
Cg = [N/kW], (10.29)
în care:
Cr este coeficientul de regresie, care depinde de nivelul tehnic al producŃiei de
tractoare, Cr = 2000…2200 N/(kW)2/3;
Pn - puterea nominală, în kW.
10.12.2 Determinarea greutăŃii de exploatare
Prin greutate de exploatare G se înŃelege greutatea tractorului în timpul utilizării lui,
care este, evident, întotdeauna mai mare decât greutatea constructivă şi se compune din:
greutatea constructivă a tractorului; greutatea materialelor de exploatare (combustibil,
lubrifianŃi şi apă); greutatea tractoristului, care, în calcule, se adoptă egală cu 750 N; greutatea
cutiei cu scule; greutatea echipamentului special (care se montează temporar şi, de obicei, la
cererea beneficiarului); greutatea lestului (greutăŃi adiŃionale, apă în pneuri). Greutatea
tractorului mai este influenŃată de greutatea maşinilor agricole purtate şi de interacŃiunea
acestora cu solul şi cu tractorul.
Greutatea de exploatare a tractorului este unul din cei mai importanŃi parametri de
exploatare, influenŃând într-o măsură foarte mare randamentul de tracŃiune al tractorului,
consumul de combustibil şi productivitatea sistemului.
Greutatea de exploatare G se determină din condiŃia de aderenŃă cu solul şi a asigurării
unor calităŃi de tracŃiune şi economice ridicate, corespunzătoare exploatării tractorului pe un
teren orizontal, într-u regim stabilizat (v = const.). În acest caz, bilanŃul de tracŃiune al
tractorului are forma:
.fGFF tm +=
Exprimând forŃa Fm în funcŃie de forŃa motoare specifică, ϕm = Fm/Gad, (forŃa motoare
raportată la greutatea aderentă), se obŃine:

135
,fGFG tmm +=λϕ
de unde
⋅−
=f
FG
mm
t
λϕ
Între funcŃie de forŃa motoare specifică, ϕm = Fm/Gad, şi forŃa de tracŃiune specifică,
ϕt= Ft/Gad, se deduce următoarea relaŃie de legătură:
,m
tm
t
m
m
ad
mm
f
G
fGF
G
F
G
F
λϕ
λλϕ +=
+=== (10.30)
unde λm este un coeficient care ia în considerare ponderea greutăŃii aderente.
Pentru tractoarele pe roŃi 4×4 sau pe şenile, λm = 1. Pentru tractoarele 4×2, în calculul
de tracŃiune, se adoptă λm = 0,8 (în poziŃie statică λm = 0,6…0,65).
În baza relaŃiei de definiŃie a forŃei de tracŃiune specifice, rezultă:
⋅=mt
tFG
λϕ
Se consideră raŃional ca tot calculul de tracŃiune să fie raportat la treapta nominală de
lucru (treapta principală de lucru) a tractorului, la care randamentul de tracŃiune este maxim.
Corespunzător acestui regim, ultima relaŃie devine:
⋅=mtn
tnFG
λϕ (10.31)
Valorile optime ale parametrului ϕtn sunt date, în funcŃie de tipul tractorului, pe roŃi
sau pe şenile, în tabelul 10.14.
U10.13 Metoda grafoanalitică de trasare a caracteristicii teoretice de tracŃiune
Caracteristica de tracŃiune (sau diagrama de tracŃiune) se construieşte în funcŃie de
forŃa de tracŃiune Ft (respectiv forŃa motoare Fm) şi cuprinde reprezentarea grafică a
următoarelor funcŃii:
δ = f1(Ft) – patinarea;
v = f2(Ft) – viteza reală;
Pt = f3(Ft) – puterea de tracŃiune;
ct = f4(Ft) – consumul specific de combustibil, raportat la puterea de tracŃiune.
Se consideră cazul exploatării tractorului pe un teren orizontal, la un regim stabilizat
(v=const.).
Cu excepŃia patinării, toate mărimile depind de treapta de viteză şi, de aceea, trasarea
lor se face pentru fiecare treaptă. În continuare se prezintă metoda grafoanalitică a trasării
caracteristicii (fig. 10.4).

136
ConstrucŃia caracteristicii începe cu trasarea caracteristicii de turaŃie a motorului în
funcŃie de momentul efectiv Me, în cadranul III. Ea cuprinde următoarele curbe: puterea
efectivă Pe = f1(Me); turaŃia motorului n = f2(Me); consumul orar C = f3(Me) (v. subcapitolul
10.4).
Punctele (mărimile) cele mai importante ale caracteristicii motorului sunt turaŃia
nominală nn şi de mers în gol ng, momentul nominal Mn, momentul maxim Mmax şi turaŃia
corespunzătoare acestuia nM, puncte prin care s-au construit drepte ajutătoare (cu linie
întreruptă).
În cadranul II se construieşte graficul vitezelor teoretice vt. Acestea se trasează în
funcŃie de turaŃia n a motorului. Între viteza teoretică şi turaŃia arborelui cotit există o
dependenŃă liniară:
,30 1nkn
i
rπv
trt ==
în care:
r este raza dinamică a roŃilor motoare;
itr – raportul total de transmitere al transmisiei tractorului;
k1 = πr/(30itr) = const. pentru fiecare treaptă de viteză.
Se obŃine astfel un fascicul de drepte care trec prin originea O. Pentru trasarea fiecărei
drepte, pe lângă origine, mai este necesar un singur punct. Acesta corespunde vitezei teoretice
la turaŃia nominală nn. Pentru fiecare treaptă de viteză determinată după metodica de la
paragraful 10.11, se trasează, Ńinând cont de scara adoptată pentru viteze, un punct pe
verticala ridicată la turaŃia nn.

137
Fig. 10.4. Metoda grafoanalitică a trasării caracteristicii de tracŃiune

138
Metoda trasării caracteristicii (fig. 10.4) este exemplificată pentru două trepte:
- treapta 1 (curbe cu indice 1) – caracterizează treptele la care calităŃile de tracŃiune
sunt limitate de aderenŃa tractorului cu solul (trepte neaderente);
- treapta 2 (curbe cu indice 2) – caracterizează treptele la care calităŃile de tracŃiune
sunt limitate de puterea motorului (trepte aderente).
În cadranul IV se reprezintă variaŃia forŃei motoare Fm, respectiv a forŃei de tracŃiune
Ft în funcŃie de momentul efectiv al motorului Me. Această dependenŃă este liniară pentru
fiecare treaptă de viteză (v. relaŃia 10.13). ForŃa motoare Fm se măsoară din punctul O1, situat
la distanŃa Rr = fG faŃă de originea sistemului de coordonate. Prin urmare, din punctul O se
vor măsura forŃele de tracŃiune, iar din O1 forŃele motoare, având în vedere că, în condiŃiile
considerate (teren orizontal şi vt=const.), Fm = Ft +Rr.
Pe dreapta ajutătoare construită prin punctul corespunzător valorii momentului
nominal Mn, se măsoară forŃele de tracŃiune pentru fiecare treaptă, determinate cu relaŃiile
(10.1) şi (10.3) sau (10.13) (v. punctele b4 din fig. 10.4) şi se construiesc drepte care trec prin
punctul O1, notate în diagramă cu Ft1 şi Ft2.
În cadranul I se construieşte caracteristica de tracŃiune propriu-zisă. Prima curbă care
se trasează este cea a patinării δ = f(Ft), folosind relaŃii analitice sau obŃinute pe cale
experimentală (v. subcapitolul 10.4).
Pentru exemplificare, trasarea graficelor vitezelor reale v, puterii de tracŃiune Pt şi
consumului specific de tracŃiune ct, se va analiza separat cazul treptelor la care calităŃile de
tracŃiune sunt limitate de puterea motorului, numite în continuare trepte aderente (treapta 2), şi
cele la care calităŃile de tracŃiune sunt limitate de aderenŃa tractorului cu solul - trepte
neaderente – (treapta 1).
În cazul treptelor aderente sunt suficiente câte trei puncte pentru trasarea curbelor.
Primul punct (notat în diagramă cu ai, i = 1…4) caracterizează regimul de mers în gol
al tractorului (Ft = 0, Fm = fG). Momentul efectiv al motorului este reprezentat prin punctul
a4, turaŃia motorului prin a3, viteza teoretică prin a2, şi cea reală prin a1. La mers în gol se
consideră că tractorul nu patinează şi, prin urmare, viteza teoretică este egală cu cea reală.
Al doilea punct (notat în diagramă cu bi, i = 1…4) caracterizează regimul nominal (Me
= Mn). Momentul nominal al motorului este reprezentat prin punctul b4, turaŃia nominală a
motorului prin b3, viteza teoretică prin b2 (în cadranul II) şi '1b (în cadranul I). Dacă din viteza
teoretică '1tbv se scad pierderile de viteză datorate patinării btbv δ⋅'
1 , se obŃine viteza reală
corespunzătoare regimului nominal (punctul b1). La baza determinării vitezei reale stă formula generală δvvδvv ttt −=−= )1( (din viteza teoretică se scade pierderea de viteză prin
patinare).
Al treilea punct (notat în diagramă cu ci, i = 1…4) caracterizează regimul momentului
maxim (Me = Mmax). Momentul maxim al motorului este reprezentat prin punctul c4, turaŃia
corespunzătoare momentului maxim al motorului prin c3. Vitezei teoretice îi corespunde

139
punctul c2, în cadranul II şi '1c , în cadranul I. Dacă din viteza teoretică '
1tcv se scad pierderile
de viteză din cauza patinării ctcv δ⋅'1 , se obŃine viteza reală corespunzătoare regimului
momentului maxim (punctul c1).
Graficul vitezei reale se obŃine prin unirea celor trei puncte, a1, b1 şi c1. Pentru
caracteristica teoretică de tracŃiune, se obŃine o suficientă precizie dacă punctele a1 şi b1 se
unesc printr-un segment de dreaptă, iar punctele b1 şi c1 printr-un arc de parabolă (v. fig.
10.4).
Pentru orice regim stabil de funcŃionare, puterea de tracŃiune a tractorului se determină
cu relaŃia Pt = Ftv. În cazul treptelor aderente, graficul puterii de tracŃiune se trasează tot prin
trei puncte, corespunzătoare regimurilor amintite mai sus, pentru care se cunosc forŃa de
tracŃiune Ft şi viteza reală v: - pentru regimul de mers în gol al tractorului (Ft = 0): 00 11 =⋅== aatata vvFP ;
- pentru regimul nominal (Me = Mn): 1btbtb vFP = ;
- pentru regimul momentului maxim (Me = Mmax): 1ctctc vFP = .
La o scară a puterii convenabil aleasă se trasează graficul puterii de tracŃiune, în mod
asemănător graficului vitezei reale.
Pentru trasarea curbei consumului specific de tracŃiune ct = f(Ft) sunt necesare cel puŃin trei puncte, folosind relaŃia de bază tt PCc /1000 ⋅= [g/(kWh)]. Din cele trei puncte
care caracterizează regimurile de funcŃionare ale tractorului menŃionate anterior, doar două
pot fi utilizate, respectiv cele specifice regimului nominal şi cel al momentului maxim (în
cazul regimului de mers în gol, puterea de tracŃiune Pt fiind nulă, consumul specific de
tracŃiune ct este infinit). Atât la regimul nominal, cât şi la cel al momentului maxim al
motorului, puterea de tracŃiune şi consumul orar sunt cunoscute, rezultând prin calcul
consumul specific de tracŃiune. Pentru cel de-al treilea punct al cubei se poate considera un
regim oarecare x de funcŃionare, caracterizat prin forŃa de tracŃiune Ftx, puterea de tracŃiune Ptx
şi consumul orar Cx, rezultând prin calcul consumul specific de tracŃiune ctx (v. fig. 10.4).
Pentru treptele neaderente (în modelul de faŃă treapta 1), construcŃia caracteristicii
prezintă unele particularităŃi. La aceste trepte, forŃa de tracŃiune la regimul nominal sau la
regimul momentului maxim este mai mare decât forŃa Ftφ determinată din condiŃia de
aderenŃă, la care patinarea δ =1. La aceste trepte, viteza reală scade până la zero. Viteza
teoretică la treapta 1 între regimurile a (de mers în gol, Ft = 0) şi d (patinare 100%, Ft = Ftφ)
poate fi considerată constantă (variaŃia vitezei între valorile a2 şi d2 este nesemnificativă). Prin urmare, viteza reală poate fi determinată pe cale analitică cu formula generală )1( δvv t −= ,
viteza teoretică vt păstrându-se constantă. Când δ = 1, v = 0. Trasarea curbelor se realizează
prin mai multe puncte, între regimurile a şi d, respectiv pentru valori ale forŃei de tracŃiune Ft
= 0… Ftφ.
Celelalte curbe din caracteristica de tracŃiune, respectiv puterea şi consumul specific
de tracŃiune, îşi modifică în mod corespunzător forma, însă se trasează folosindu-se aceeaşi

140
metodică. În figura 10.4, pentru un regim oarecare y, caracterizat prin forŃa de tracŃiune Fty, se
prezintă modul de determinare grafoanalitic a puterii de tracŃiune Pty şi consumului specific de
tracŃiune cty.
Să ne reamintim...
• Caracteristica de tracŃiune (sau diagrama de tracŃiune) se construieşte în
funcŃie de forŃa de tracŃiune Ft, paralelă cu solul, (respectiv forŃa motoare Fm),
pentru cazul exploatării tractorului pe un teren orizontal, într-un regim stabilizat
(v = const.).
• Ea cuprinde reprezentarea grafică a următoarelor funcŃii: - )(1 tFfδ = - patinarea în funcŃie de forŃa de tracŃiune;
- )(2 tFfv = - viteza reală în funcŃie de forŃa de tracŃiune;
- )(3 tt FfP = - puterea de tracŃiune în funcŃie de forŃa de tracŃiune;
- )(4 tt Ffc = - consumul specific de combustibil, raportat la puterea
de tracŃiune, în funcŃie de forŃa de tracŃiune.
• CalităŃile de tracŃiune ale tractoarelor sunt evaluate, mai ales, cu ajutorul
valorii forŃei tangenŃiale de tracŃiune. Această forŃă apare în procesul interacŃiunii
sistemului de rulare al tractorului cu solul (drumul) şi depinde de foarte mulŃi
factori. De exemplu, în cazul tractoarelor pe roŃi, depinde de: tipul tractorului
(4×2 sau 4×4), greutatea aderentă, tipul pneurilor şi parametrii acestora
(diametrul, lăŃimea, presiunea aerului din pneuri, înălŃimea pintenilor, pasul
acestora, desenul anvelopelor), proprietăŃile fizico-mecanice ale solului, patinarea
sistemului de rulare cu solul.
• Pentru tractoarele industriale, pe roŃi şi pe şenile, patinarea patinarea poate
fi descrisă, cu o precizie foarte bună cu relaŃiile:
- pentru tractoare pe roŃi
;11max
11,0
max
+
−−=
m
m
m
mϕ
ϕ
ϕϕ
δ
- pentru tractoare pe şenile
.)1(1 05,0
maxt
t
ϕϕ
δ −−=
• Pentru mirişte, patinarea poate fi descrisă cu ajutorul relaŃiilor:
- pentru tractoare pe roŃi
;06,31
246,03t
t
ϕϕ
δ−
=
unde 65,00 ≤≤ tϕ , ceea ce corespunde patinării ;10 ≤≤ δ

141
- pentru tractoare pe şenile
⋅−
=2377,11
0333,0
t
t
ϕϕ
δ
unde 84,00 ≤≤ tϕ , ceea ce corespunde, ca şi în cazul tractoarelor pe roŃi,
patinării 0≤δ≤1.
• Viteza reală de deplasare a tractorului se calculează cu relaŃia: ( ),1 δ−= tvv
în care vt este viteza teoretică.
• Puterea de tracŃiune Pt, în kW, se determină cu relaŃia:
,10 3 vFP tt−=
în care: Ft este forŃa de tracŃiune, în N; v - viteza reală de deplasare a tractorului,
în m/s.
• Consumul specific de combustibil, raportat la puterea de tracŃiune a
tractorului, se determină folosind relaŃia sa de definiŃie:
t
tP
Cc
310= [g/(kWh)].
în care C este consumul orar de combustibil, în kg/h.
U10.14. Rezumat
În cadrul acestei unităŃi de învăŃare au fost prezentate principiile teoretice
de determinare a caracteristicii (diagramei) de tracŃiune a tractoarelor cu
transmisie mecanică. De asemenea, a fost prezentată şi o metodă grafoanalitică de
trasare a acestei caracteristici.
Prin caracteristică (diagramă) de tracŃiune se înŃelege variaŃia
următoarelor mărimi:
Ea cuprinde reprezentarea grafică a următoarelor funcŃii: - )(1 tFfδ = - patinarea în funcŃie de forŃa de tracŃiune;
- )(2 tFfv = - viteza reală în funcŃie de forŃa de tracŃiune;
- )(3 tt FfP = - puterea de tracŃiune în funcŃie de forŃa de tracŃiune;
- )(4 tt Ffc = - consumul specific de combustibil, raportat la puterea
de tracŃiune, în funcŃie de forŃa de tracŃiune.
La aceste curbe se mai adaugă, adesea, curba consumului orar de combustibil: )(5 tFfC = .

142
U10.15. Test de evaluare a cunoştinŃelor
1. Ce reprezintă caracteristica de tracŃiune?
2. Ce este treapta principală de lucru şi cum se alege aceasta?
3. Ce se înŃelege prin viteză reală? Care este relaŃia dintre viteza reală şi
viteza teoretică?
4. Cum se determină puterea de tracŃiune?
5. Ce sunt treptele de lucru? Dar treptele lente? Dar treptele de transport?
6. Ce se înŃelege prin trepte aderente? Dar prin trepte neaderente?

143
Unitatea de învăŃare 11. AplicaŃie privind calculul de tracŃiune şi trasarea caracteristicii teoretice de tracŃiune pe cale grafoanalitică Cuprins
U11.1. Introducere...................................................................................................... 143
U11.2. CompetenŃe..................................................................................................... 143
U11.3. Calculul de tracŃiune şi caracteristica teoretică de tracŃiune, obŃinută pe cale
grafoanalitică. AplicaŃie pentru un tractor pe roŃi 4×4 ............................................... 144
U11.3.1. Determinarea vitezelor tractorului................................................... 144
U11.3.2. Determinarea forŃei de tracŃiune la treapta principală de lucru ....... 146
U11.3.3. Determinarea greutăŃii tractorului ................................................... 147
U11.3.4. Determinarea forŃei de tracŃiune (motoare) la celelalte trepte......... 147
U11.3.5. Trasarea caracteristicii de tracŃiune după metoda grafoanalitică .... 148
U11.4. Rezumat.......................................................................................................... 155
U11.1. Introducere
În cadrul acestei unităŃi de învăŃare se prezintă, prin exemple, metodica de
determinare a caracteristicii de tracŃiune a tractoarelor cu transmisie mecanică.
Este prezentată o aplicaŃie pentru un tractor pe roŃi 4×4 privind calculul de
tracŃiune şi caracteristica teoretică de tracŃiune, obŃinută pe cale grafoanalitică.
Reamintim că prin caracteristică de tracŃiune se înŃelege variaŃia vitezei
reale, a puterii de tracŃiune, a consumului specific de tracŃiune şi a consumului orar
de combustibil în funcŃie de forŃa de tracŃiune.
U11.2. CompetenŃele unităŃii de învăŃare
După parcurgerea materialului acestei unităŃi de învăŃare studenŃii vor fi
capabili:
• să poată determina pe cale teoretică forŃa de tracŃiune şi forŃa motoare pentru
orice treaptă a unui tractor existent sau aflat în faza de proiectare;
• să cunoască principiile care stau la baza modelării interacŃiunii sistemului de
rulare cu solul;
• să se familiarizeze cu metodica de construire a caracteristicii de tracŃiune a
tractorului pe cale grafoanalitică;
• să poată interpreta calităŃile de tracŃiune şi economice ale tractorului, pornind de
la caracteristica de tracŃiune.
Durata medie de parcurgere a cestei unităŃi de învăŃare este de 2 ore.

144
U11. 3 Calculul de tracŃiune şi caracteristica teoretică de tracŃiune, obŃinută pe
cale grafoanalitică. AplicaŃie pentru un tractor pe roŃi 4×4
Se cere să se efectueze calculul de tracŃiune şi să se traseze caracteristica teoretică de
tracŃiune pentru un tractor pe roŃi 4×4, impunându-se următoarele caracteristici tehnice: motor
Diesel, având puterea nominală Pn = 100 kW, la turaŃia nn = 2500 rot/min, numărul treptelor
de viteză – 16+4.
11.3.1 Determinarea vitezelor tractorului
Vitezele tractorului, respectiv rapoartele de transmitere, se determină în aşa fel încât
momentul efectiv al motorului să varieze în aceleaşi limite la toate treptele de viteză, prin
metoda progresiei geometrice (v. subcapitolul 10.11).
11.3.1.1 Determinarea raŃiei progresiei geometrice
RaŃia progresie geometrice se determină cu relaŃia:
1
max
min1
1−− == NN
n v
v
v
vq ,
în care:
vmin= v1 este viteza minimă de deplasare a tractorului, respectiv viteza la treapta 1;
vmax= vn - viteza maximă de deplasare a tractorului, respectiv viteza la treapta n;
N - numărul teoretic (de calcul) al treptelor de viteză (al termenilor progresiei
geometrice, N > n) (v. subcapitolul 10.11).
Pentru exemplul considerat s-au adoptat valorile:
vmin= 2 km/h; vmax= 36 km/h; N = 23.
RaŃia progresie geometrice este:
87688,036
2221
max
min === −N
v
vq .
11.3.1.2 Stabilirea vitezelor teoretice ale tractorului
În figura 11.1 este reprezentată schema bloc a unei cutii de viteze compuse cu n trepte
de mers înainte şi k trepte pentru mersul înapoi. Numărul treptelor de mers înainte n este egal
cu produsul dintre numărul treptelor din cutia principală m şi numărul treptelor reductorului k
(n = mk).
Fig. 11.1. Schema bloc a cutiei de viteze compuse: 1 – cutie de viteze principală; 2 – cutie de viteze
suplimentară (reductor); 3 – cutie de viteze compusă.

145
Pentru exemplul considerat: m = 4 şi k = 4. În tabelul 11.1 se prezintă valorile
vitezelor teoretice şi împărŃirea lor pe game (v. şi subcapitolul 10.9). În paranteze sunt trecute
valorile corespunzătoare treptelor care se anulează după calculul raŃiei q.
Tabelul 11.1
Structura vitezelor pentru o cutie de viteze cu n = 16 şi N = 23
Numărul treptei de viteză (calculat şi efectiv) şi valoarea vitezei în km/h şi m/s
1 (2) 3 (4) 5 (6) 7 8 9 10 11 12 13 14 15 (16) 17 (18) 19 (20) 21 (22) 23
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
2,00
(2,28)
2,60
(2,97)
3,38
(3,86)
4,40
5,02
5,72
6,52
7,44
8,49
9,68
11,04
12,58
(14,35)
16,37
(18,66)
21,28
(24,27)
27,68
(31,57)
36,00
Gam
a viteze
0,56
(0,63)
0,72
(0,82)
0,94
(1,07)
1,22
1,39
1,59
1,81
2,07
2,36
2,69
3,07
3,50
(3,99)
4,55
(5,18)
5,91
(6,74)
7,69
(8,77)
10,00
I x x x x
II x x x x
III x x x x
IV x x x x
Raportul dintre game: iII / iI = q7 = 0,402; iIII/ iII = q = 0,877; iIV/ iIII = q
8 = 0,349;
Se constată un număr de 8 trepte de lucru (cu viteze cuprinse în intervalul de 4…12
m/s), mai mare decât cel minim recomandat, respectiv 6 trepte (v. subcapitolul 10.9).
11.3.1.3 Alegerea treptei principale (nominale) de lucru
În literatura de specialitate sunt recomandate valori ale vitezelor teoretice pentru
treapta principală de lucru. În tabelul 11.2 sunt redate aceste valori în cazul calculului de
tracŃiune pe mirişte.
Tabelul 11.2
Valori recomandate ale vitezelor teoretice pentru treapta nominală (pe mirişte)
Viteza teoretică vtn Tipul tractorului
m/s km/h
Pe roŃi 4×2 2,22…2,50 8…9
Pe roŃi 4×4 2,22…2,50 8…9
Pe şenile 1,39…1,67 5…6
În cazul tractoarelor pe roŃi, se recomandă vtn ≈ 8,5 km/h, iar în cazul tractoarelor pe
şenile vtn ≈ 5 km/h.

146
Pentru exemplul de faŃă, se alege ca treaptă principală de lucru treapta a 9-a, pentru
care vt9 = 8,49 km/h = 2,36 m/s.
11.3.2 Determinarea forŃei de tracŃiune la treapta principală de lucru (treapta
nominală)
11.3.2.1 Calculul preliminar al randamentului de tracŃiune la treapta principală de
lucru
Se foloseşte relaŃia:
( )
⋅+
−=
)(1
1
tnm
ntrtn φλf
δηη
Pentru mărimile din această relaŃie se recomandă valorile:
ηtr = 0,91…0,93 – randamentul transmisiei;
f = 0,08…0,1 – coeficientul de rezistenŃă la rulare, pe mirişte;
ϕtn = 0,4…0,45 – forŃa de tracŃiune specifică la treapta principală de lucru;
λm = 1 – coeficient care ia în considerare ponderea greutăŃii aderente a tractorului
(valoare pentru tractoare pe roŃii 4×4).
Pentru tractoare pe roŃi, patinarea poate fi determinată cu relaŃia:
134,042,006,31
42,0246,0
06,31
246,033
=⋅−⋅
=−
=tn
tnn φ
φδ .
În aceste condiŃii, randamentul de tracŃiune la treapta principală de lucru va fi:
( )
670,042,0/08,01
)134,01(92,0
)(1
1=
+−
=+
−=
tnm
ntrtn φλf
δηη .
S-au adoptat valorile ηtr = 0,92; f = 0,08; ϕtn = 0,42.
11.3.2.2 Calculul forŃei de tracŃiune Ftn
ForŃa de tracŃiune la treapta principală de lucru se calculează cu relaŃia:
)1( ntn
tnn
n
tnntn
δv
ηP
v
ηPF
−== [N], (11.1)
în care:
Pn este puterea nominală, în W;
ηtn - randamentul de tracŃiune la treapta nominală;
δn - patinarea;
vn şi vtn - viteza reală şi viteza teoretică la treapta nominală, în m/s.
Pentru cazul considerat, forŃa de tracŃiune la treapta principală de lucru (a 9 – a) va fi:
32787)134,01(36,2
1067,0100
)1(
3
=−
⋅⋅=
−=
ntn
tnntn
δv
ηPF [N].

147
11.3.3 Determinarea greutăŃii tractorului
Determinarea greutăŃii, atât a celei constructive, cât şi a celei de exploatare, se face pe
baza recomandărilor de la subcapitolul 10.10. În continuare se efectuează calculul pentru
exemplul considerat.
11.3.3.1 Determinarea greutăŃii constructive
Greutatea constructivă se determină cu relaŃia:
ncc PgG ⋅= [N].
Conform recomandărilor (v. subcapitolul 10.10), se calculează greutatea specifică
constructivă gc:
431100
200033
===n
rc
P
Cg N/kW.
Se recomandă pentru coeficientul de regresie Cr = (2000…2200) N/(kW)2/3. S-a
adoptat valoarea Cr = 2000 N/(kW)2/3.
Se obŃine pentru greutatea constructivă valoarea:
43100100431 =⋅=⋅= ncc PgG [N].
11.3.3.2 Determinarea greutăŃii de exploatare
Greutatea de exploatare se determină cu relaŃia:
mtn
tnFG
λϕ ⋅= [N].
łinând cont de valorile forŃei de tracŃiune la treapta nominală Ftn = 32787 [N], a forŃei specifice de tracŃiune 42,0=tnϕ şi a coeficientului λm = 1, se obŃine:
7806542,0
32787==
⋅=
mtn
tnFG
λϕ [N].
11.3.4 Determinarea forŃei de tracŃiune (motoare) la celelalte trepte
Valorile forŃei de tracŃiune Ft, respectiv forŃei motoare Fm se determină din ipoteza
conform căreia puterea la roŃile motoare este aceeaşi la toate treptele:
=⋅=⋅= tmtrnm vFηPP const. (11.2)
în care:
ηtr este randamentul total al transmisiei;
vt - viteza teoretică a tractorului.
łinând cont de bilanŃul de tracŃiune al tractorului pe un teren orizontal, într-un regim
stabilizat (v = const.)

148
,fGFF tm +=
precum şi de relaŃia (11.2), se poate scrie pentru o treaptă oarecare k şi treapta principală
(nominală) de lucru egalitatea
( ) ( ) ,AvfGFvfGF tntntktk =⋅+=⋅+
din care rezultă valoarea forŃei de tracŃiune şi a forŃei motoare pentru treapta k:
fGv
AF
tktk −= [N] şi
tkmk v
AF = [N], (11.3)
în care:
f este coeficientul rezistenŃei la rulare (se recomandă f = 0,08…0,1);
G - greutatea de exploatare a tractorului, în N;
vtk - viteza teoretică corespunzătoare treptei k, în m/s.
Pentru exemplul considerat, valorile forŃelor de tracŃiune şi a forŃelor motoare sunt
prezentate în tabelul 11.3.
Calculele s-au efectuat pentru f = 0,08.
Tabelul 11.3
Valorile forŃelor de tracŃiune Ftk şi a forŃelor motoare Fmk
Treapta 1 2 3 4 5 6 7 8
ForŃa de tracŃiune, kN 159,35 121,09 91,67 69,04 59,77 51,64 44,52 38,27 ForŃa motoare, kN 165,60 127,33 97,91 75,29 66,02 57,89 50,76 44,51 Treapta 9 10 11 12 13 14 15 16
ForŃa de tracŃiune, kN 32,79 27,98 23,77 20,07 13,99 9,32 5,72 2,95 ForŃa motoare, kN 39,03 34,23 30,01 26,32 20,24 15,56 11,96 9,20
11.3.5 Trasarea caracteristicii de tracŃiune după metoda grafoanalitică
Caracteristica de tracŃiune se trasează în conformitate cu cele prezentate la
subcapitolul 10.13.
11.3.5.1 Trasarea caracteristicii externe a motorului
Caracteristica motorului se construieşte în cadranul III şi cuprinde curbele: puterea
efectivă Pe = f1(Me); turaŃia motorului n = f2(Me); consumul orar C = f3(Me).
În situaŃia în care nu se cunoaşte caracteristica motorului utilizat pe tractor, pot fi
folosite relaŃiile următoare:
- pentru puterea efectivă a motorului:
−+=
2
13,187,0nnn
nen
n
n
n
n
nPP [kW] (v. tabelul 10.2);

149
- pentru momentul efectiv al motorului:
n
PM e
e 9550= [N];
- pentru consumul specific de combustibil:
+−=
2
55,155,1nn
nn
n
n
ncc [g/(kWh)].
Consumul specific de combustibil la regimul nominal poate fi determinat, în mod aproximativ, cu relaŃia min05,1 ccn ⋅= , în g/(kWh), unde cmin este consumul specific minim
de combustibil (în lipsa altor valori, se poate considera cmin= (224…245) g/(kWh)).
Pentru consumul orar de combustibil se foloseşte relaŃia (1.9), adică:
.10 3ecPC −=
Calculul se poate face tabelar pentru diferite turaŃii (0,5nn ≤ n ≤ nn).
TuraŃia corespunzătoare momentului maxim se determină cu relaŃia nM nn2
13,1= .
TuraŃia maximă de mers în gol variază între limitele ng = (1,06…1,1) nn.
În zona caracteristicii de regulator, funcŃiile Pe = f1(Me), n = f2(Me), C = f3(Me) pot fi
considerate liniare. Dacă consumul orar Cg la mersul în gol al motorului nu se cunoaşte, se poate adopta ( ) ng CC 35,0...25,0= .
Pentru exemplul considerat s-a efectuat calculul necesar trasării caracteristicii externe
a motorului (tabelul 11.4), fiind date sau adoptându-se următoarele valori: Pn = 100 kW;
nn = 2500 min-1; cmin=230 g/(kWh)), ng = 2700 min-1; Cg = 0,3Cn.
Tabelul 11.4
Calculul tabelar al caracteristicii externe a motorului pentru exemplul considerat
TuraŃia motorului n, rot/min
1200 1413 1600 1800 2000 2200 2400 2500 2700
Puterea efectivă Pe, kW
56,74 67,19 75,75 83,89 90,72 95,92 99,19 100 0
Momentul efectiv Me, Nm
451,52 454,28 452,14 445,11 433,19 416,38 394,68 382,00 0
Consumul specific ce, g/(kWh)
250,29 239,92 233,68 230,00 229,43 231,94 237,54 241,50 -
Consumul orar C, kg/h
14,20 16,12 17,70 19,30 20,81 22,25 23,56 24,15 7,25
11.3.5.2 Trasarea caracteristicii vitezelor teoretice
Caracteristica vitezelor teoretice se trasează în cadranul II şi reprezintă un fascicul de
drepte care trec prin originea sistemului de coordonate al caracteristicii de tracŃiune
(v. fig.10.3). Pentru trasarea fiecărei drepte, pe lângă origine, mai este necesar un singur

150
punct. Acesta corespunde vitezei teoretice la turaŃia nominală nn. Valoarea vitezei a fost
determinată pentru fiecare treaptă în parte la paragraful 11.3.1.2.
Pentru exemplul considerat, valorile vitezelor teoretice la turaŃia nominală pentru cele
16 trepte se regăsesc în tabelul 11.1.
11.3.5.3 Trasarea caracteristicii forŃelor de tracŃiune
Caracteristica forŃelor de tracŃiune, respectiv a forŃelor motoare, reprezintă un fascicul
de drepte care trec prin punctul O1, situat la distanŃa Rr = fG faŃă de originea sistemului de
coordonate O (v. fig. 10.4). Din punctul O se vor măsura forŃele de tracŃiune, iar din O1 forŃele
motoare, având în vedere că, în condiŃiile considerate (teren orizontal şi vt=const.), Fm = Ft
+Rr. Cel de-al doilea punct al fiecărei drepte îl reprezintă punctul de coordonate (Ftk, Mn).
Valorile forŃelor de tracŃiune Ftk, corespunzătoare regimului nominal, se găsesc în tabelul
11.3.
11.3.5.4 Trasarea caracteristicii de tracŃiune
Caracteristica de tracŃiune se trasează în cadranul I. Ea cuprinde reprezentarea grafică
a următoarelor funcŃii: • )(1 tFfδ = - patinarea în funcŃie de forŃa de tracŃiune;
• )(2 tFfv = - viteza reală în funcŃie de forŃa de tracŃiune;
• )(3 tt FfP = - puterea de tracŃiune în funcŃie de forŃa de tracŃiune;
• )(4 tt Ffc = - consumul specific de combustibil, raportat la puterea de
tracŃiune, în funcŃie de forŃa de tracŃiune.
La aceste curbe se mai adaugă, uneori, curba consumului orar de combustibil: )(5 tFfC = . Cu excepŃia patinării, toate celelalte mărimi depind de treapta de viteză şi, de
aceea, curbele lor de variaŃie se trasează pentru fiecare treaptă.
Pentru tractoare pe roŃi, patinarea poate fi determinată cu relaŃia:
,06,31
246,03t
t
ϕϕ
δ−
=
unde )( GF mtt λϕ = este forŃa de tracŃiune specifică; 65,00 ≤≤ tϕ , ceea ce corespunde
patinării .10 ≤≤ δ
Curba patinării se construieşte pentru diferite valori ale forŃei de tracŃiune în intervalul
tt FF ≤≤0 , unde 742,50065,7865,065,0 =⋅== GF mt λϕ kN este forŃa de tracŃiune
limitată din condiŃia de aderenŃă ( 1=mλ pentru tractoare pe roŃi 4×4).
Pentru această aplicaŃie, în tabelul 11.5 s-au calculat valorile patinării.
Pentru trasarea vitezei reale, puterii de tracŃiune şi consumului specific de tracŃiune se
procedează după metodica prezentată la subcapitolul 10.11, în funcŃie de felul treptei
(aderentă sau neaderentă). Reamintim că la treptele aderente, calităŃile de tracŃiune sunt limitate de puterea motorului ( ϕttk FF ≤ ), iar la cele neaderente, calităŃile de tracŃiune sunt
limitate de aderenŃa tractorului cu solul. În cazul acestei aplicaŃii, comparând forŃele de

151
tracŃiune la regimul nominal tkF cu forŃa de tracŃiune maximă din condiŃia de aderenŃă ϕtF ,
se constată că treptele 1…6 sunt neaderente, iar treptele 7…16 sunt aderente. Treapta a 7–a, la
regimul momentului maxim, este neaderentă.
Pentru treptele aderente, trasarea graficelor se face prin trei puncte (v. subcapitolul
10.11), iar pentru cele neaderente – prin mai multe, de regulă pentru valorile forŃei de
tracŃiune folosite şi la calculul patinării.
Pentru exemplul considerat, în tabelul 11.5 se prezintă valorile determinate
grafoanalitic necesare trasării caracteristicii pentru treptele neaderente (treptele 1…6), iar în
tabelul 11.6 valorile pentru treptele aderente (treptele 7…16).
Tabelul 11.5
Valorile determinate grafoanalitic pentru trasarea caracteristicii de tracŃiune a treptelor
neaderente
Ft, kN 0 20 35 40 45 47 48 49 49,5 50 50,5 50,742
φt 0 0,256 0,448 0,512 0,576 0,602 0,615 0,628 0,634 0,640 0,647 0,65
δ 0 0,066 0,152 0,214 0,343 0,446 0,524 0,635 0,709 0,804 0,927 1
vt, km/h 2,15 2,15 2,15 2,15 2,15 2,15 2,15 2,15 2,15 2,15 2,15 2,15
v, km/h 2,15 2,01 1,83 1,69 1,42 1,19 1,03 0,79 0,63 0,42 0,16 0
Pt, kW 0 11,17 17,75 18,81 17,70 15,58 13,67 10,71 8,60 5,86 2,20 0
C, kg/h 7,9 9,9 11,5 12,0 12,5 12,7 12,8 12,9 12,9 13,0 13,0 13,1 Treapta 1
ct, g/(kWh) - 888 645 636 705 814 935 1203 1503 2215 5936 -
vt, km/h 2,80 2,80 2,80 2,80 2,80 2,80 2,80 2,80 2,80 2,80 2,80 2,80
v, km/h 2,80 2,61 2,37 2,20 1,84 1,55 1,33 1,02 0,81 0,55 0,20 0
Pt, kW 0 14,52 23,07 24,44 23,00 20,25 17,76 13,91 11,18 7,62 2,85 0
C, kg/h 8,1 10,7 12,7 13,4 14,0 14,3 14,4 14,6 14,6 14,7 14,8 14,8 Treapta 2
ct, g/(kWh) - 739 551 548 611 707 813 1048 1310 1931 5178 -
vt, km/h 3,64 3,64 3,64 3,64 3,64 3,64 3,64 3,64 3,64 3,64 3,64 3,64
v, km/h 3,64 3,39 3,08 2,86 2,39 2,01 1,73 1,33 1,06 0,71 0,26 0
Pt, kW 0 18,86 29,97 31,74 29,88 26,31 23,08 18,08 14,52 9,90 3,71 0
C, kg/h 8,3 11,8 14,4 15,2 16,1 16,4 16,6 16,8 16,9 17,0 17,0 17,1 Treapta 3
ct, g/(kWh) - 624 479 480 539 625 720 928 1162 1713 4596 -
vt, km/h 4,72 4,72 4,72 4,72 4,72 4,72 4,72 4,72 4,72 4,72 4,72 4,72
v, km/h 4,72 4,41 4,00 3,71 3,10 2,62 2,25 1,72 1,37 0,93 0,34 0
Pt, kW 0 24,49 38,92 41,23 38,80 34,16 29,97 23,47 18,86 12,86 4,82 0
C, kg/h 8,6 13,1 16,5 17,6 18,8 19,2 19,4 19,6 19,8 19,9 20,0 20,0 Treapta 4
ct, g/(kWh) - 536 424 428 483 562 648 837 1048 1546 4151 -

152
vt, km/h 5,38 5,38 5,38 5,38 5,38 5,38 5,38 5,38 5,38 5,38 5,38 5,38
v, km/h 5,38 5,02 4,56 4,23 3,54 2,98 2,56 1,97 1,56 1,05 0,39 0
Pt, kW 0 27,90 44,34 46,97 44,21 38,92 34,15 26,75 21,49 14,65 5,49 0
C, kg/h 8,8 14,0 17,8 19,1 20,4 20,9 21,1 21,4 21,5 21,6 21,8 21,8 Treapta 5
ct, g/(kWh) - 500 402 406 461 536 619 800 1001 1478 3969 -
vt, km/h 6,13 6,13 6,13 6,13 6,13 6,13 6,13 6,13 6,13 6,13 6,13 6,13
v, km/h 6,13 5,72 5,20 4,82 4,03 3,40 2,92 2,24 1,78 1,20 0,45 0
Pt, kW 0 31,79 50,52 53,52 50,37 44,35 38,90 30,47 24,48 16,69 6,25 0
C, kg/h 9,1 14,9 19,3 20,7 22,2 22,8 23,1 23,4 23,5 23,7 23,8 23,9 Treapta 6
ct, g/(kWh) - 469 382 388 441 514 593 767 961 1418 3810 -
Tabelul 11.6
Valorile determinate grafoanalitic pentru trasarea caracteristicii treptelor aderente Treapta a 7-a Treapta a 8-a Regimul încărcării tractorului
La Ft =0 La Mn La Mmax La Ft =0 La Mn La Mmax ForŃa de tracŃiune Ft, kN 0 44,517 54,1 0 38,267 46,7 ForŃa specifică de tracŃiune φt 0 0,570 0,65 0 0,490 0,60 Patinarea δ 0 0,324 1 0 0,189 0,43 Viteza teoretică vt, km/h 6,98 6,52 3,7 7,95 7,44 4,2 Viteza reală v, km/h 6,98 4,41 0 7,95 6,04 2,4 Puterea de tracŃiune Pt, kW 0 54,51 0 0 64,18 31,3 Consumul specific ct, g/(kWh) - 443 - - 376 515
Treapta a 9-a Treapta a 10-a Regimul încărcării tractorului La Ft =0 La Mn La Mmax La Ft =0 La Mn La Mmax
ForŃa de tracŃiune Ft, kN 0 32,787 40,2 0 27,982 34,5 ForŃa specifică de tracŃiune φt 0 0,42 0,51 0 0,36 0,44 Patinarea δ 0 0,134 0,22 0 0,10 0,15 Viteza teoretică vt, km/h 9,1 8,49 4,8 10,3 9,68 5,5 Viteza reală v, km/h 9,1 7,35 3,8 10,3 8,68 4,7 Puterea de tracŃiune Pt, kW 0 66,95 41,9 0 67,49 44,6 Consumul specific ct, g/(kWh) - 361 385 - 358 361
Treapta a 11-a Treapta a 12-a Regimul încărcării tractorului La Ft =0 La Mn La Mmax La Ft =0 La Mn La Mmax
ForŃa de tracŃiune Ft, kN 0 23,768 29,4 0 20,073 25,1 ForŃa specifică de tracŃiune φt 0 0,304 0,38 0 0,257 0,32 Patinarea δ 0 0,082 0,11 0 0,067 0,09 Viteza teoretică vt, km/h 11,73 11,04 6,2 13,35 12,58 7,1 Viteza reală v, km/h 11,73 10,13 5,5 13,35 11,74 6,5 Puterea de tracŃiune Pt, kW 0 66,88 45,3 0 65,49 45,1 Consumul specific ct, g/(kWh) - 361 356 - 369 357
Treapta a 13-a Treapta a 14-a Regimul încărcării tractorului La Ft =0 La Mn La Mmax La Ft =0 La Mn La Mmax
ForŃa de tracŃiune Ft, kN 0 13,991 17,8 0 9,315 12,3 ForŃa specifică de tracŃiune φt 0 0,179 0,23 0 0,119 0,16

153
Patinarea δ 0 0,045 0,06 0 0,030 0,04 Viteza teoretică vt, km/h 17,27 16,37 9,2 22,30 21,28 12,0 Viteza reală v, km/h 17,27 15,63 8,7 22,30 20,66 11,6 Puterea de tracŃiune Pt, kW 0 60,75 43,11 0 53,45 39,35 Consumul specific ct, g/(kWh) - 398 374 - 452 410
Treapta a 15-a Treapta a 16-a Regimul încărcării tractorului La Ft =0 La Mn La Mmax La Ft =0 La Mn La Mmax
ForŃa de tracŃiune Ft, kN 0 5,720 8,0 0 2,955 4,7 ForŃa specifică de tracŃiune φt 0 0,073 0,10 0 0,038 0,06 Patinarea δ 0 0,018 0,03 0 0,009 0,01 Viteza teoretică vt, km/h 28,74 27,68 15,6 36,92 36,00 20,3 Viteza reală v, km/h 28,74 27,18 15,2 36,92 35,66 20,0 Puterea de tracŃiune Pt, kW 0 43,19 33,8 0 29,27 26,1 Consumul specific ct, g/(kWh) - 559 477 - 825 617
În figura 11.2 este reprezentată caracteristica de tracŃiune determinată pe cale
grafoanalitică pentru aplicaŃia considerată.

154
Fig. 11.2. Caracteristica de tracŃiunedeterminată pe cale grafoanalitică

155
U11.4. Rezumat
În cadrul acestei unităŃi de învăŃare s-a prezentat, prin exemple, metodica
de determinare a caracteristicii (diagramei) de tracŃiune a tractoarelor cu
transmisie mecanică.
A fost prezentată o aplicaŃie pentru un tractor pe roŃi 4×4 privind calculul
de tracŃiune şi caracteristica teoretică de tracŃiune, obŃinută pe cale grafoanalitică.
Reamintim că prin caracteristică de tracŃiune se înŃelege variaŃia vitezei
reale, a puterii de tracŃiune, a consumului specific de tracŃiune şi a consumului
orar de combustibil în funcŃie de forŃa de tracŃiune.

156
Bibliografie.
1. Atamanov, Iu. E., Guskov, V. V., Masiuk, S. K. Traktorî, ciast VII, Vîşeişaia şkola,
Minsk, 1979.
2. Atamanov, Iu. E., Ksenevici, I. P., Solonskii, A. S. Traktorî, ciast VIII, Vîşeişaia şkola,
Minsk, 1982.
3. Ciolan, Gh., Preda, I., Pereş, Gh. Cutii de viteze pentru automobile, Editura didactică şi
Pedagogică, Bucureşti, 1998.
4. Ghinzburg, Iu. V., Şved, A. I., Parfenov, A. P. Promîşlennîe traktorî, Maşinostroienie,
Moscova, 1986.
5. Grünvald, B. Teoria, calculul şi construcŃia motoarelor pentru autovehicule rutiere,
Editura Didactică şi Pedagogică, Bucureşti,1980.
6. Jalobeanu, C., Raşca, I. MATHCAD. Probleme de calcul numeric şi statistic, Editura
Albastră, Cluj Napoca, 1995.
7. Guskov, V. V. Traktorî, teoria, ciast II, Vîşeişaia şkola, Minsk, 1977.
8. Kolcin, A. I., Demidov, V. P. Rasciot avtomobilnîh i traktornîh dvigatelei, Vîşaia şkola,
Moskva, 1980.
9. Ksenevici, I. P., Solonskii, A. S., Voicinskii, S. M. Proiektirovanie universalno-propaşnîh
traktorov. Nauka i tehnika, Minsk, 1980.
10. MihăŃoiu, I., Demetrescu, I., Caragiugiuc, Gr., Fulga, E. Tractoare. Editura Ceres,
Bucureşti, 1984.
11. Năstăsoiu, M., Ispas, N., Năstăsoiu, S., Study on the interaction in the tractor-attachment
system during braking considering the attachment mass and the correlation of brakes
control. The 8th International Conference FUEL ECONOMY, SAFETY AND
RELIABILITY OF MOTOR VEHICLES, ESFA 2009, Universitatea ”Politehnica”
Bucureşti, ISSN – 2067-1083, Bucureşti, 12-14 nov. 2009.
12. Năstăsoiu, M., Pădureanu, V. Tractoare. Determinarea performanŃelor de tracŃiune şi
economice, Editura UnuversităŃii Transilvania, Braşov, 2004.
13. Năstăsoiu, M., Pădureanu, V., Florea, D., Năstăsoiu, S. Metodica încercării tractoarelor
4x4 în vederea stabilirii performanŃelor de tracŃiune şi economice ale acestora. În: IXth
International Conference CONAT’99, Automotive For The Next Century, Vol. III,
Editura UniversităŃii Transilvania din Braşov, 1999, ISBN 973-9474-19-5, p.99-106.

157
14. Năstăsoiu, M., Pădureanu, V., Năstăsoiu, S. ConsideraŃii privind patinarea
autovehiculelor, În : Buletinul ESFA’98, vol. 1, Bucureşti, 1998, p. 117-122.
15. Năstăsoiu, M., Pădureanu, V., Năstăsoiu, S. Cu privire la avantajele şi dezavantajele
tractoarelor pe roŃi 4x4. În: Buletinul sesiunii ştiinŃifice cu participare internaŃională
”Prezent şi viitor în domeniul maşinilor şi instalaŃiilor destinate agriculturii şi industriei
alimentare”, vol. II, INMA Bucureşti, 1997, p. 182-187.
16. Năstăsoiu, M., Pădureanu, V., Năstăsoiu, S. The Mathematical Modelling of 4x4 Tractor’s
Interaction with the Soil Aims at Determining the Distribution of Tractive Effort within the
Driven Axles. In: Proceedings of the IVth International Research and Technical
Conference „Motorization and Energetics in Agriculture” Motrol ′03, Lublin – Kiev,
2003.
17. Năstăsoiu, M., Pădureanu, V., Năstăsoiu, S., Mathematical Modelling of the Diesel
Engine–Hydrodynamic Torque Converter System Output Characteristic. În: Buletinul
UniversităŃii Transilvania din Braşov, seria A, vol. 10 (45), 2003.
18. Năstăsoiu, M., Pădureanu, V., Năstăsoiu, S., Simeon, C. Potential Tractor Performance
Characteristics if Part of the Engine Delivered Power is Transmitted through the Power
Take-off. In: Proceedings of the VIIth International Conference ESFA 2003, Universitatea
Politehnica Bucureşti, 2003, p.103…108, vol. 1, ISBN 973-8449-10-3.
19. Năstăsoiu, M., Pădureanu, V.: Tractoare. Transmisii ale tractoarelor, Editura
UniversităŃii Transilvania, Braşov, 1999. Năstăsoiu, M., Pădureanu, V. Tractoare.
Determinarea performanŃelor de tracŃiune şi economice, Editura UniversităŃii
Transilvania, Braşov, 2004.
20. Năstăsoiu, M., Popescu, S., Pădureanu, V,. ConstrucŃia şi utilizarea prizelor de putere ale
tractoarelor la acŃionarea maşinilor şi utilajelor agricole. Tehnici Moderne de Utilizare a
Mijloacelor Energetice în Agricultură. Editura UniversităŃii Transilvania Braşov –2003
ISBN 973-9474-53-5.
21. Năstăsoiu, M., Studiul sistemelor motor cu putere constantă – transmisie pentru tractoare
agricole. Teză de doctorat, Universitatea Transilvania din Braşov, 1998.
22. Năstăsoiu, S. Turbomaşini şi acŃionări hidraulice pentru autovehicule, Universitatea din
Braşov,1980.
23. Năstăsoiu, S., Andreescu, C., Popescu, S., FrăŃilă, G., Cristea, D. Tractoare, Editura
Didactică şi Pedagogică, Bucureşti,1983.
24. NiŃescu, G., Năstăsoiu, S., Popescu, S. Tractoare, Editura Didactică şi Pedagogică,
Bucureşti,1974.

158
25. Pădureanu, V., Popescu, S., Năstăsoiu, M., Autovehicule pentru gospodărire comunală.
Tehnici Moderne de Utilizare a Mijloacelor Energetice în Agricultură. Editura
UniversităŃii Transilvania Braşov –2003, ISBN 973-9474-53-5.
26. Pereş, Gh. ş. a. Transmisii speciale şi acŃionări pentru tractoare, Universitatea din
Braşov, 1989.
27. Scheiber, E., Lixăndroiu, D. MathCAD. Prezentare şi probleme rezolvate, Editura
Tehnică, Bucureşti, 1994.
28. Scheiber, E., Lupu, M. Matematici speciale. Rezolvarea problemelor asistată de
calculator, Editura Tehnică, Bucureşti, 1998.
29. Untaru, M. ş. a. Dinamica autovehiculelor pe roŃi, Editura Didactică şi Pedagogică,
Bucureşti,1980.
30. Untaru, M. ş. a. Dinamica autovehiculelor, Universitatea din Braşov, 1988.
31. Wong, J. Y. Theory of Ground Vehicles, JohnWiley & Sons, Inc., New York,1993.
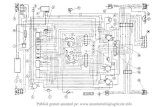





![de avere/2014... · 1. Autovehicule]autoturisme, tractoare, masini agricole, salupe, iahturi si alte mijloace de transport care sunt supuse înmatticulärii, potrivit legii](https://static.fdocumente.com/doc/165x107/5e0a613040f2b06ade46d871/de-avere2014-1-autovehiculeautoturisme-tractoare-masini-agricole-salupe.jpg)










