Curs Dinamica
149
Dinamica structurilor şi inginerie seismică Note de curs Aurel Stratan Timişoara 2010
Transcript of Curs Dinamica

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 1/149
Dinamica structurilor şi inginerie seismică
Note de curs
Aurel Stratan
Timişoara 2010
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 2/149
1. Introducere
1
1. Introducere
Dinamica structurilor are ca obiectiv principal elaborarea unor metode de determinare a eforturilor şi
deformaiilor în structuri supuse unor aciuni dinamice. O aciune dinamică este o aciune a cărei mărime,
direcie sau punct de aplicare variază în timp. Dinamica structurilor dezvoltă metodele de calcul specifice
disciplinei de statica construciilor, considerând variaia în timp a răspunsului unei structuri ca efect al uneiaciuni dinamice.
Multe dintre aciunile care solicită structurile inginereşti pot fi considerate statice, în principal pentru a
simplifica calculul structural. Cu toate acestea, majoritatea structurilor sunt supuse şi unor aciuni dinamice
pe parcursul duratei de viaă. Din punct de vedere teoretic, este convenabil să se facă distincia între încărcări
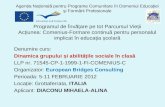
periodice şi neperiodice. Câteva exemple tipice de aciuni dinamice sunt reprezentate schematic în Figura
1.1. O aciune periodică este caracterizată de faptul că înregistrează aceiaşi valoare la perioade determinate
de timp. Aciunile periodice pot fi armonice simple, descrise de o funcie trigonometrică sinus sau cosinus
(vezi Figura 1.1a). Acest tip de fore dinamice sunt generate de echipamente rotative cu o masă care nu este
echilibrată perfect. Alte forme de aciuni periodice sunt mai complexe (vezi Figura 1.1b). Astfel de solicitări
dinamice pot fi generate de presiunea hidrodinamică generată de elicea unui vapor, sau de motoare cu piston.
Aciunile neperiodice sunt fie încărcări de tip puls, de scurtă durată (Figura 1.1c), cum ar fi cele generate deo explozie, fie aciuni de lungă durată (Figura 1.1d), generate de cutremurele de pământ.
(a)
u(t)
p(t)
echipamente care
conin mase
rotative
excentrice
(b)
u(t)
p(t)
elicea unui vapor
(c)
u(t)
p(t)
presiunea pe o
clădire datorată
unei explozii în
vecinătatea
acesteia
(d)
u(t)
p(t)
cutremur de
pământ
Figura 1.1. Exemple de încărcări dinamice tipice: aciune periodică armonică (a), aciune periodică
complexă (b), aciune de tip puls (c), aciune de lungă durată (d)ş după Clough şi Penzien, 2003.

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 3/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
2
Există două diferene eseniale între răspunsul dinamic şi cel static al unei structuri. Prima dintre acesteaconstă în variaia în timp a aciunii dinamice şi, în consecină, a răspunsului structurii în cazul unei aciunidinamice. În timp ce o structură acionată de o încărcare statică are un răspuns caracterizat de o stare unică asistemului, o aciune dinamică implică determinarea unei succesiuni de stări ale structurii la intervalesuccesive de timp. În consecină, o problemă de dinamică este mai complexă şi mai consumatoare de timp şiresurse decât o problemă de statică.
Cea de-a doua diferenă între aciunile statice şi cele dinamice constă în faptul că cele din urmă generează fore de inerie, care intervin în echilibrul de fore ale structurii. Calculul răspunsului unei structuri ar putea firealizat prin metodele staticii construciilor dacă forele de inerie ar fi neglijabile, chiar dacă aciunea şirăspunsul structurii variază în timp. Forele de inerie sunt considerabile atunci când masa structurii şiacceleraiile acesteia sunt importante, determinarea răspunsului structurii necesitând abordări specificedinamicii structurilor.

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 4/149
2. Dinamica sistemelor cu un singur grad de libertate dinamică
3
2. Dinamica sistemelor cu un singur grad de libertate dinamică
2.1. Ecuaii de mişcare, formularea problemei, metode de rezolvare
2.1.1. Sisteme cu un singur grad de libertate dinamică
Multe tipuri de structuri inginereşti pot fi idealizate ca şi structuri relativ simple, care facilitează determinarea răspunsului dinamic. Un exemplu este castelul de apă din Figura 2.1a. Această structură poatefi schematizată printr-o masă m fixată la capătul superior al unei console f ără masă, dar cu rigiditatea k (veziFigura 2.1b), numit pendul inversat. În relaie cu această schematizare structurală, dinamica structurilor areca obiectiv determinarea deformaiilor şi eforturilor în pendulul inversat atunci când asupra masei acionează o foră dinamică laterală (orizontală), sau când o mişcare seismică orizontală induce oscilaii ale bazeipendulului inversat. Sistemul structural din Figura 2.1b este un sistem cu un singur grad de libertatedinamică (GLD).
k
m
(a) (b)
Figura 2.1. Un castel de apă (a), http://commons.wikimedia.org/wiki/Image:Carmel-indiana-water-tower.jpg şi idealizarea acestuia sub forma unui pendul inversat (b).
Numărul de grade de libertate dinamică (GLD) necesare într-o analiză dinamică a unei structuri estenumărul de deplasări independente necesare pentru definirea poziiei deplasate a maselor faă de poziia loriniială.
Pe lângă castelul de apă din Figura 2.1a, multe alte tipuri de structuri pot fi idealizate ca şi structuri cu unsingur grad de liberate dinamică (SGLD). Un exemplu este cadrul parter reprezentat în Figura 2.2, care poatefi idealizat printr-un sistem format din masa m concentrată la nivelul riglei, cadrul f ără masă care oferă rigiditate sistemului şi amortizorul care disipează energia de vibraie a sistemului. Într-o structură reală fiecare element structural (grinda şi stâlpii) contribuie la masa, rigiditatea şi amortizarea structurii. În schemaidealizată în schimb, fiecare dintre aceste proprietăi este concentrată într-o componentă separată:componenta de masă, componenta de rigiditate şi componenta de amortizare.
Este de menionat faptul că numărul de grade de libertate dinamică este în general diferit de numărul degrade de libertate statică (gradul de nedeterminare geometrică) folosite la determinarea eforturilor înstructură prin metoda deplasărilor (o problemă de statică). Astfel, cadrul din Figura 2.2 are un singur grad delibertate dinamică (deplasarea laterală a masei concentrate la nivelul acoperişului), în schimb gradul denedeterminare statică este egal cu trei (două rotiri de noduri şi o deplasare laterală).
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 5/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
4
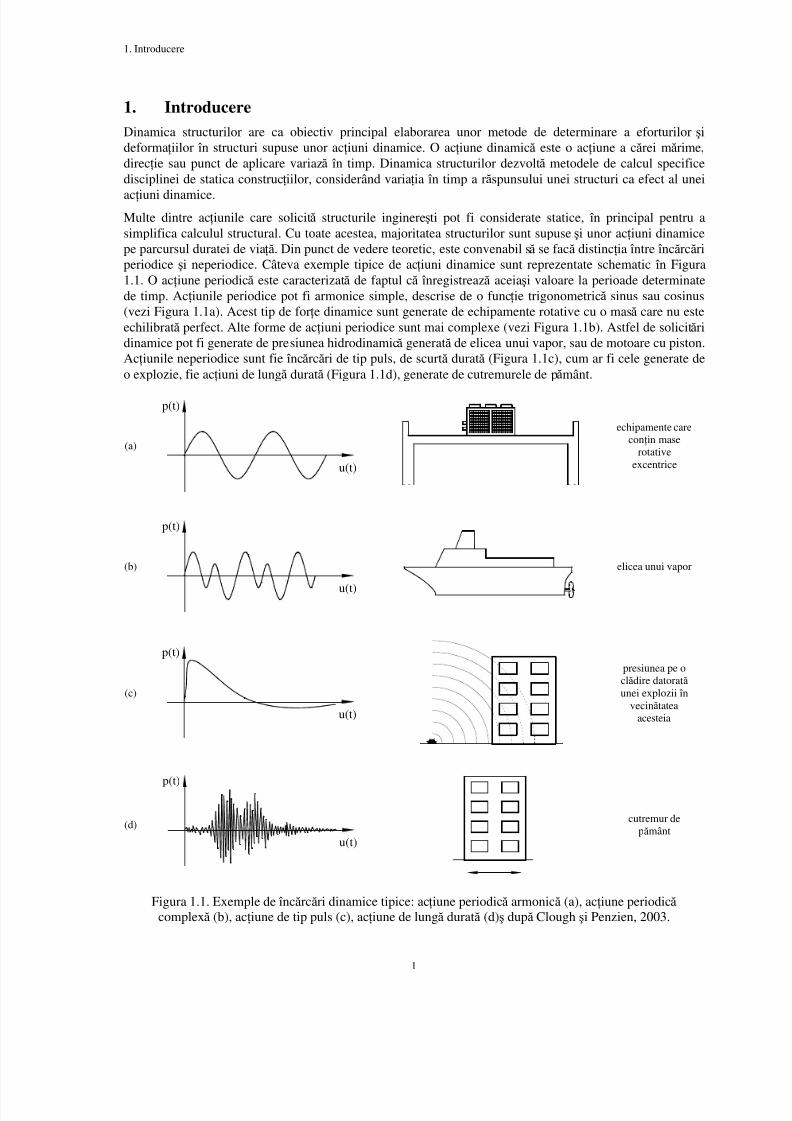
Figura 2.2. Un sistem cu un singur grad de libertate dinamică sub aciunea unei fore dinamice p(t) (a); şi aunei mişcări seismice la baza structurii (b).
Vor fi considerate două tipuri de încărcare dinamică: (1) o foră dinamică p(t) după direcia orizontală (veziFigura 2.2a) şi (2) o mişcare seismică orizontală ug(t) aplicată la baza structurii (vezi Figura 2.2b). În ambelecazuri u reprezintă deplasarea laterală între masă şi baza structurii.
2.1.2. Rela ia for ă-deplasare
Să considerăm structura din Figura 2.3a asupra căreia acionează fora statică f S pe direcia gradului de
libertate u. Determinarea relaiei dintre fora f S şi deplasarea u este o problemă clasică de staticaconstruciilor.
Figura 2.3. Relaii foră-deplasare (Chopra, 2001).
În cazul unui sistem liniar elastic (vezi Figura 2.3d), materialul din care este compusă structura are ocomportare elastică, iar eforturile în structură se determină pe baza ipotezei deplasărilor mici, folosind uncalcul de ordinul I. Pentru un astfel de sistem relaia dintre fora f S şi deplasarea u este liniară:
S f k u= ⋅ (2.1)
unde k este rigiditatea laterală a sistemului, unităile acesteia fiind (Foră /Lungime).
În cazul unor structuri reale, elementele structurale pot intra în curgere la deformaii mari, curba dedescărcare şi reîncărcare diferind de curba de încărcare iniială. Acest efect se datorează comportării plastice
a materialului, iar sistemul corespunzător se numeşte inelastic (vezi Figura 2.3c). Pentru un astfel de sistemrelaia dintre fora f S şi deplasarea u nu mai este liniară şi depinde de istoria şi direcia de încărcare:
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 6/149
2. Dinamica sistemelor cu un singur grad de libertate dinamică
5
( ),S S f f u u= (2.2)
unde u reprezintă viteza sistemului (viteza pozitivă corespunde creşterii deformaiilor, iar viteza negativă –micşorării deformaiilor).
Răspunsul dinamic al sistemelor inelastice este important deoarece multe structuri au o comportare inelastică sub aciunea unor mişcări seismice puternice din cauza curgerii, fisurării şi a degradării elementelor
structurale.
2.1.3. For a de amortizare
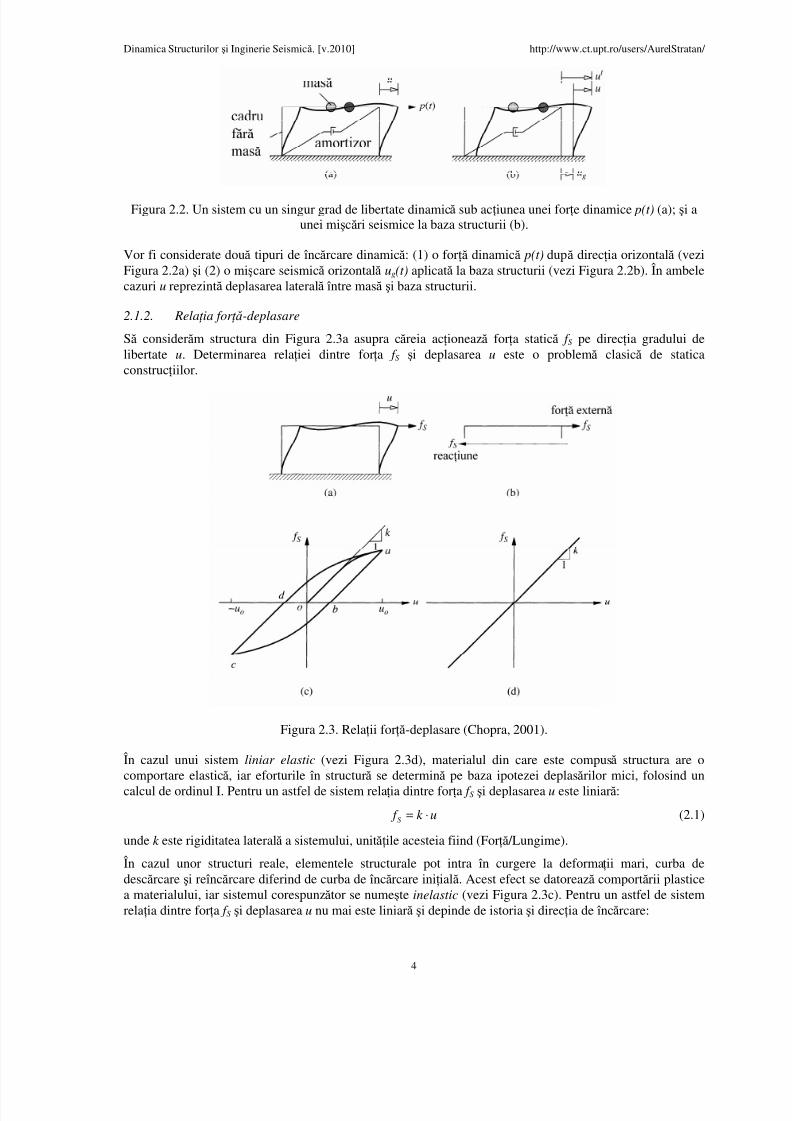
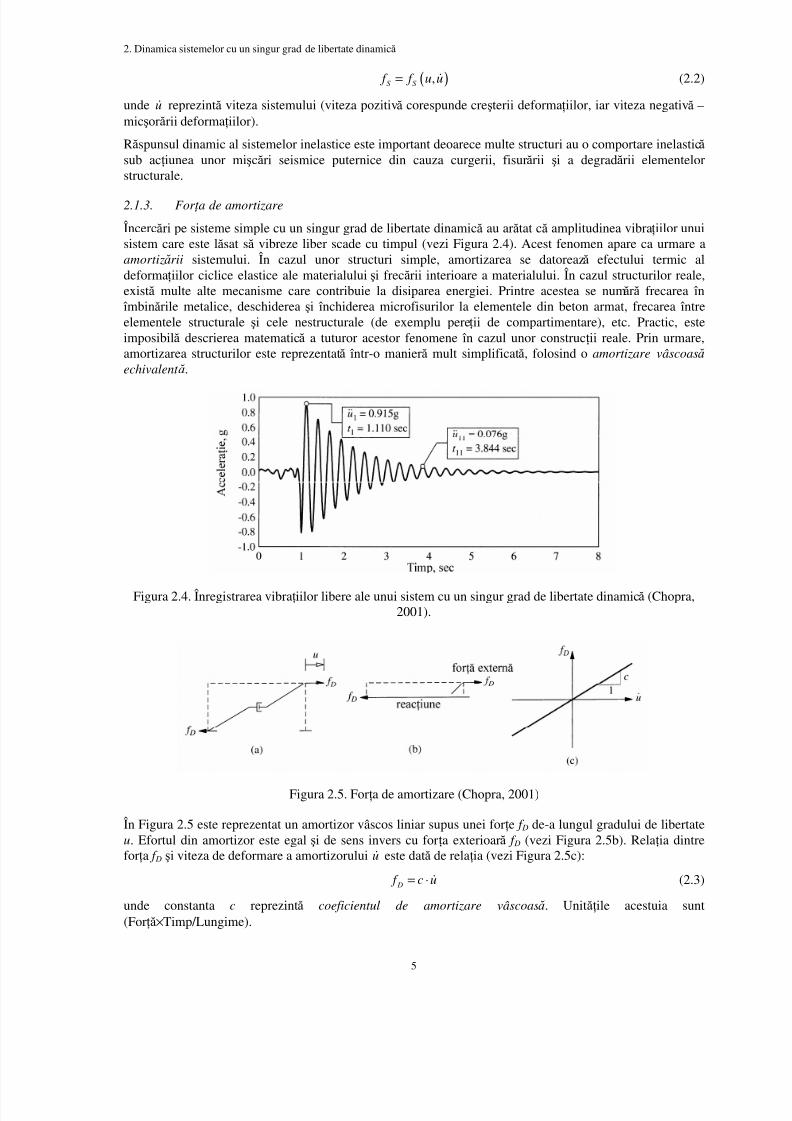
Încercări pe sisteme simple cu un singur grad de libertate dinamică au arătat că amplitudinea vibraiilor unuisistem care este lăsat să vibreze liber scade cu timpul (vezi Figura 2.4). Acest fenomen apare ca urmare aamortizării sistemului. În cazul unor structuri simple, amortizarea se datorează efectului termic aldeformaiilor ciclice elastice ale materialului şi frecării interioare a materialului. În cazul structurilor reale,există multe alte mecanisme care contribuie la disiparea energiei. Printre acestea se numără frecarea în
îmbinările metalice, deschiderea şi închiderea microfisurilor la elementele din beton armat, frecarea întreelementele structurale şi cele nestructurale (de exemplu pereii de compartimentare), etc. Practic, esteimposibilă descrierea matematică a tuturor acestor fenomene în cazul unor construcii reale. Prin urmare,
amortizarea structurilor este reprezentată într-o manieră mult simplificată, folosind o amortizare vâscoasă echivalent ă.
Figura 2.4. Înregistrarea vibraiilor libere ale unui sistem cu un singur grad de libertate dinamică (Chopra,2001).
Figura 2.5. Fora de amortizare (Chopra, 2001)
În Figura 2.5 este reprezentat un amortizor vâscos liniar supus unei for e f D de-a lungul gradului de libertateu. Efortul din amortizor este egal şi de sens invers cu fora exterioară f D (vezi Figura 2.5b). Relaia dintrefora f D şi viteza de deformare a amortizorului u este dată de relaia (vezi Figura 2.5c):
D f c u= ⋅ (2.3)
unde constanta c reprezintă coeficientul de amortizare vâscoasă. Unităile acestuia sunt(Foră×Timp/Lungime).

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 7/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
6
Coeficientul de amortizare vâscoasă pentru structuri reale poate fi determinat pe baza unor încercări devibraii libere sau forate ale construciilor. Amortizarea vâscoasă echivalentă este folosită pentru modelareaenergiei disipate la deformaii ale structurii în domeniul elastic. În domeniul inelastic, datorită comportăriiinelastice a elementelor structurale, se produce o disipare suplimentară de energie, care trebuie cuantificată
în mod direct.
2.1.4. Ecua ia de mi şcare în cazul unei for e externe
În Figura 2.6 este reprezentat un sistem cu un singur grad de libertate dinamică (SGLD) supus unei foredinamice p(t) pe direcia gradului de libertate u. Atât fora p(t), cât şi deplasarea rezultată u(t) variază cutimpul. Ecuaia diferenială care stabileşte deplasarea u(t) poate fi determinată prin două metode: (1) folosindlegea a doua a lui Newton şi (2) folosind principiul de echilibru dinamic (principiul lui D'Alambert). Oalternativă celor două metode o constituie stabilirea ecuaiei de mişcare pe baza componentelor de rigiditate,amortizare şi masă.
Legea a doua a lui Newton
Forele care acionează asupra masei m la un moment dat sunt: fora perturbatoare p(t), fora elastică (sauinelastică) f S şi fora de amortizare f D (vezi Figura 2.6b). Fora externă p(t), precum şi deplasarea u(t), viteza
( )u t şi acceleraia ( )u t
sunt pozitive în direcia pozitivă a axei x. Forele f S şi f D sunt reprezentate în figură acionând în sens invers, deoarece acestea sunt fore interne (eforturi) care se opun deformaiei, respectiv
vitezei. Legea a doua a lui Newton stabileşte că derivata impulsului ( )d
mudt
în raport cu timpul este egală cu
rezultanta tuturor forelor aplicate sistemului. inând seama de faptul că în mecanica clasică masa poate ficonsiderată constantă, derivata impulsului devine mu .Fora rezultantă de-a lungul axei x este p - f S - f D, şifolosind legea a doua a lui Newton obinem:
S D p f f mu− − = (2.4)
de unde:
S D
mu f f p+ + = (2.5)
Înlocuind în ecuaia (2.5) relaiile (2.1) şi (2.3), această ecuaie devine:
( ) ( ) ( ) ( )mu t cu t ku t p t + + = (2.6)
Aceasta este ecuaia de mişcare ce caracterizează deplasarea u(t) a sistemului idealizat din Figura 2.6a,presupus a fi liniar elastic, sub aciunea unei fore dinamice p(t).
Figura 2.6. Determinarea ecuaiei de mişcare pentru un sistem SGLD (Chopra, 2001).
Principiul lui D'Alambert
Principiul lui D'Alambert se bazează pe noiunea de foră de inerie, care este egală cu produsul dintre masă şi acceleraie şi acionează în sens invers acceleraiei. Conform principiului lui D'Alambert, un sistem este înechilibru dinamic dacă în fiecare moment forele care acionează asupra sistemului, inclusiv fora de inerie,
sunt în echilibru static. În Figura 2.6c este prezentat sistemul de fore care acionează asupra masei m,aceasta din urmă fiind înlocuită cu fora de inerie, reprezentată cu linie întreruptă pentru a o distinge deforele reale. Scriind echilibrul forelor se obine ecuaia (2.5), care a fost obinută anterior folosind legea adoua a lui Newton.

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 8/149
2. Dinamica sistemelor cu un singur grad de libertate dinamică
7
Componentele de rigiditate, amortizare şi masă
Ecuaia de mişcare a unui sistem dinamic poate fi formulată printr-o procedură alternativă. Sub aciuneaforei exterioare p(t), starea sistemului este descrisă de deplasarea u(t), viteza ( )u t şi acceleraia ( )u t , (vezi
Figura 2.7a). Acest sistem poate fi vizualizat ca şi combinaia a trei componente pure: (1) componenta derigiditate: cadrul f ără masă şi f ără amortizare (vezi Figura 2.7b); (2) componenta de amortizare: cadrulamortizat, dar f ără masă sau rigiditate (vezi Figura 2.7c); şi (3) componenta de masă: masa concentrată la
nivelul acoperişului, f ără rigiditatea sau amortizarea cadrului (vezi Figura 2.7d).Relaia dintre fora externă f S şi deplasarea u pentru un sistem liniar elastic este dată de ecuaia (2.1), cea
între fora de amortizare f D şi viteza u de relaia (2.3), iar fora de inerie f I care acionează asupracomponentei de masă este dată de relaia I
f mu= . Astfel, fora exterioară p(t) poate fi considerată distribuită
la cele trei componente ale structurii, iar S D I f f f + + trebuie să egaleze fora exterioară p(t), ceea ce
conduce la ecuaia de mişcare formulată de relaia (2.5). Această abordare pentru stabilirea ecuaiei demişcare este utilă în cazul sistemelor complexe, cu mai multe grade de libertate dinamică.
(a)Deplasarea u Viteza u Acceleraia u
(b)Deplasarea u
(c)Viteza u
(d)Acceleraia u
Figura 2.7. Sistemul (a), componenta de rigiditate (b), componenta de amortizare (c) şi componenta de masă (d), Chopra, 2001.
Sistemul cu un singur grad de libertate dinamică idealizat prin cadrul parter din Figura 2.6 este sugestiv încontextul ingineriei civile. În tratatele clasice de mecanică şi fizică, comportarea sistemelor SGLD este
analizată pe baza unui sistem format dintr-o masă, un resort elastic şi un amortizor (vezi Figura 2.8a).Folosind legea a doua a lui Newton (vezi Figura 2.8b) sau principiul lui D'Alambert (vezi Figura 2.8c) seobine aceeaşi ecuaie de mişcare (2.6) care a fost determinată anterior pentru cadrul parter.
Figura 2.8. Reprezentarea clasică a unui sistem cu un singur grad de libertate dinamică, Chopra, 2001.
2.1.5. Ecua ia de mi şcare în cazul ac iunii seismice
În contextul ingineriei seismice, problema principală a dinamicii structurilor este determinarea răspunsuluistructural sub efectul mişcării seismice care acionează la baza structurii. Notând deplasarea terenului cu ug,deplasarea totală (sau absolută) a masei cu u
t şi deplasarea relativă între teren şi masă cu u (vezi Figura 2.9), în orice moment se poate scrie următoarea relaie:
( ) ( ) ( )t
gu t u t u t = + (2.7)
Atât ut cât şi ug se referă la acelaşi sistem inerial de referină, iar direciile lor pozitive coincid.
Ecuaia de mişcare pentru sistemul SGLD din Figura 2.9a poate fi determinată prin oricare dintre metodeledescrise în seciunea 2.1.4. În continuare se va folosi principiul echilibrului dinamic al lui D'Alambert. Pe
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 9/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
8
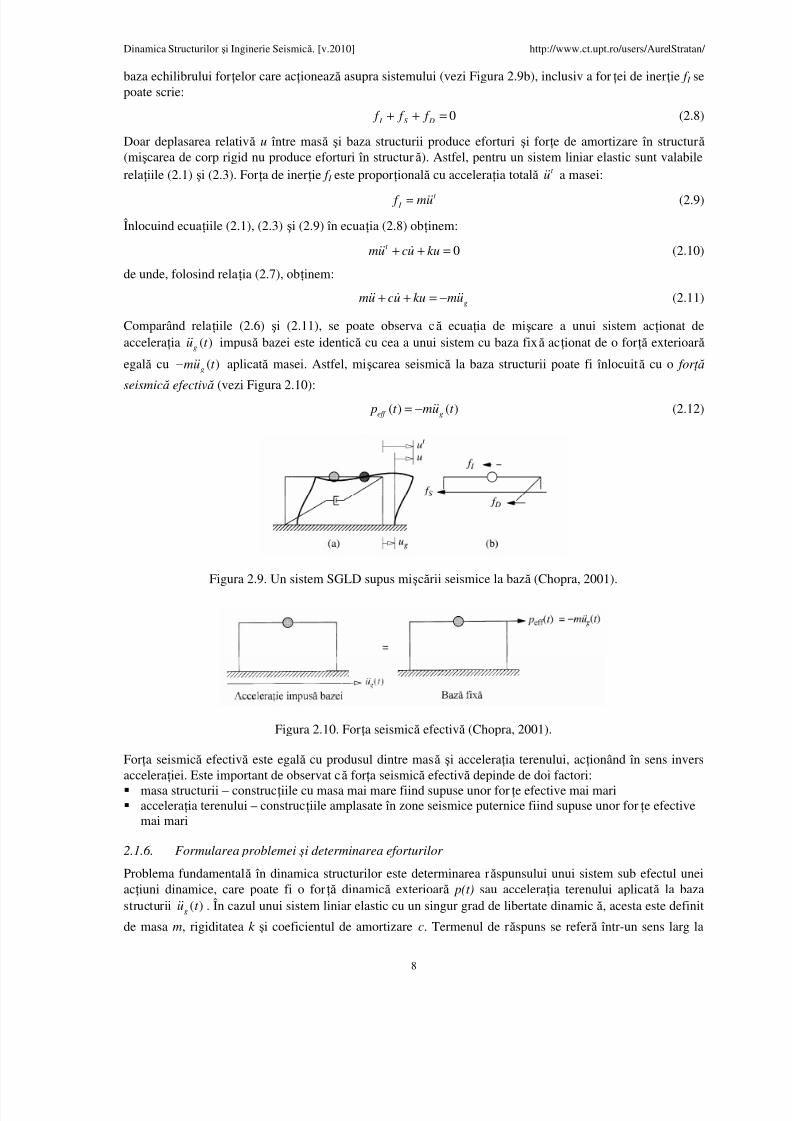
baza echilibrului forelor care acionează asupra sistemului (vezi Figura 2.9b), inclusiv a forei de inerie f I sepoate scrie:
0 I S D
f f f + + = (2.8)
Doar deplasarea relativă u între masă şi baza structurii produce eforturi şi fore de amortizare în structură (mişcarea de corp rigid nu produce eforturi în structură). Astfel, pentru un sistem liniar elastic sunt valabile
relaiile (2.1) şi (2.3). Fora de inerie f I este proporională cu acceleraia totală t
u a masei:t
I f mu= (2.9)
Înlocuind ecuaiile (2.1), (2.3) şi (2.9) în ecuaia (2.8) obinem:
0t mu cu ku+ + = (2.10)
de unde, folosind relaia (2.7), obinem:
gmu cu ku mu+ + = − (2.11)
Comparând relaiile (2.6) şi (2.11), se poate observa că ecuaia de mişcare a unui sistem acionat deacceleraia ( )gu t impusă bazei este identică cu cea a unui sistem cu baza fixă acionat de o foră exterioară
egală cu ( )gmu t − aplicată masei. Astfel, mişcarea seismică la baza structurii poate fi înlocuită cu o for ă
seismică efectivă (vezi Figura 2.10):
( ) ( )eff g p t mu t = − (2.12)
Figura 2.9. Un sistem SGLD supus mişcării seismice la bază (Chopra, 2001).
Figura 2.10. Fora seismică efectivă (Chopra, 2001).
Fora seismică efectivă este egală cu produsul dintre masă şi acceleraia terenului, acionând în sens inversacceleraiei. Este important de observat că fora seismică efectivă depinde de doi factori: masa structurii – construciile cu masa mai mare fiind supuse unor fore efective mai mari acceleraia terenului – construciile amplasate în zone seismice puternice fiind supuse unor fore efective
mai mari
2.1.6. Formularea problemei şi determinarea eforturilor
Problema fundamentală în dinamica structurilor este determinarea răspunsului unui sistem sub efectul unei
aciuni dinamice, care poate fi o foră dinamică exterioară p(t) sau acceleraia terenului aplicată la bazastructurii ( )gu t . În cazul unui sistem liniar elastic cu un singur grad de libertate dinamică, acesta este definit
de masa m, rigiditatea k şi coeficientul de amortizare c. Termenul de răspuns se referă într-un sens larg la
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 10/149
2. Dinamica sistemelor cu un singur grad de libertate dinamică
9
orice cantitate care defineşte comportarea structurii, cum ar fi deplasarea, viteza, acceleraia masei, saueforturi şi tensiuni în elementele structurii. În cazul unei încărcări seismice, pot fi necesare atât valorile totale(sau absolute), cât şi cele relative ale deplasării ( )u t , vitezei ( )u t şi acceleraiei ( )u t . Deplasările relative
( )u t asociate deformaiilor structurii sunt cele mai importante, deoarece eforturile în elementele structurii
sunt în relaie directă cu deformaiile.
Prin rezolvarea ecuaiei de mişcare a sistemului cu un grad de libertate dinamică (cadrul parter din exemplele
anterioare), se obine variaia în timp a deformaiei ( )u t a structurii. Pe baza acestor valori, printr-o analiză statică a structurii, se pot determina eforturile din elementele structurale (momentele de încovoiere, eforturileaxiale şi cele tăietoare) în orice moment de timp dat. Această analiză statică a structurii poate fi vizualizată îndouă moduri: Structura poate fi analizată sub efectul deplasării laterale impuse ( )u t . Folosind metoda deplasărilor se
pot determina rotirile de noduri, iar ulterior eforturile în elementele structurale. Cel de-al doilea mod constă în folosirea unei for e statice echivalente, un concept central în determinarea
răspunsului seismic al structurilor. La orice moment de timp dat t , aceasta este o foră statică exterioară f S care produce deplasarea u determinată din analiza dinamică. Astfel:
( ) ( )S f t ku t = (2.13)
unde k este rigiditatea laterală a structurii. Eforturile din elementele structurale (momentele de încovoiere,eforturile axiale şi cele tăietoare) pot fi determinate în orice moment de timp dat, printr-o analiză statică astructurii sub efectul forelor f S determinate conform ecuaiei (2.13).
2.1.7. Combinarea r ăspunsului static cu cel dinamic
În aplicaiile practice este deseori necesară determinarea eforturilor totale dintr-o structură, rezultate dincombinarea încărcărilor statice (de obicei gravitaionale) existente în structură înainte de aplicarea aciuniidinamice, cu cele rezultate din aciunea dinamică. În cazul sistemelor liniar elastice este valabil principiulsuprapunerii efectelor, de aceea răspunsul total poate fi determinat prin suprapunerea rezultatelor a două analize separate: (1) analiza statică a structurii sub efectul încărcărilor permanente, utile, variaiei detemperatură, etc. şi (2) răspunsul dinamic al structurii.
În cazul sistemelor inelastice nu mai este valabil principiul suprapunerii efectelor. Răspunsul dinamic al unorastfel de sisteme trebuie să ină cont de deformaiile şi eforturile existente în structură înainte de aplicarea încărcării dinamice.
2.1.8. Metode de rezolvare a ecua iei de mi şcare
Ecuaia de mişcare a unui sistem liniar elastic cu un singur grad de libertate dinamică este o ecuaiediferenială de ordinul doi, determinată anterior:
( )mu cu ku p t + + = (2.14)
Pentru a defini problema în mod complet, trebuie specificate deplasarea iniială (0)u şi viteza iniială (0)u .
De obicei structura este în repaus înainte de aplicarea încărcării dinamice, astfel încât cele două valori sunt
egale cu zero. În cele ce urmează sunt trecute în revistă trei metode de rezolvare a ecuaiei de mişcare.
Solu ia clasică
Soluia completă u(t) a unei ecuaii difereniale liniare neomogene de ordinul doi este compusă din sumasoluiei complementare uc(t) şi a celei particulare u p(t). Astfel, u(t) = uc(t) + u p(t). Deoarece ecuaiadiferenială este de ordinul doi, există două constante de integrare în soluia complementară, care pot fideterminate cunoscând condiiile iniiale. Soluia clasică de rezolvare a ecuaiei de mişcare este deosebit deutilă în cazul vibraiilor libere şi a celor forate la care fora dinamică este definită analitic.
Exemplu:
Ecuaia de mişcare în cazul unui sistem SGLD neamortizat (c = 0), sub efectul unei fore de tip
treaptă p(t)=p0 , t ≥ 0 este:0mu ku p+ = (a)

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 11/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
10
Soluia particulară a ecuaiei (a) este
0( ) p
pu t
k = (b)
iar soluia complementară este:
( ) cos sinc n nu t A t B t ω ω = + (c)
unde A şi B sunt constante de integrare şi n k mω = .
Soluia completă este dată de suma ecuaiilor (b) şi (c):
0( ) cos sinn n
pu t A t B t
k ω ω = + + (d)
Dacă sistemul este în repaus înainte de aplicarea încărcării dinamice, pentru t = 0 avem (0) 0u = şi(0) 0u = . Pentru aceste condiii iniiale se pot determina constantele A şi B:
0 0 p
A Bk
= − = (e)
Înlocuind ecuaiile (e) în ecuaia (d) rezultă soluia ecuaiei de mişcare analizate:
0( ) (1 cos )n
pu t t
k ω = −
Integrala Duhamel
O altă modalitate de a determina soluia unei ecuaii difereniale liniare se bazează pe reprezentarea încărcăriiseismice sub forma unei secvene de impulsuri infinitezimale. Răspunsul unui sistem sub efectul foreiaplicate p(t) la timpul t se obine prin însumarea răspunsului tuturor impulsurilor până în acel moment.Pentru cazul unui sistem SGLD neamortizat aflat în repaus înainte de aplicarea încărcării dinamice, rezultă
următoarea relaie:
0
1( ) ( )sin[ ( )]
t
n
n
u t p t d m
τ ω τ τ
ω
= −∫ (2.15)
unden
k mω = . Ecuaia (2.15) este cunoscută sub denumirea de integrală Duhamel şi reprezintă o formă
specială a integralei de convoluie. Ecuaia este valabilă numai pentru condiii iniiale "de repaos". IntegralaDuhamel reprezintă o metodă alternativă faă de metoda clasică de determinare a răspunsului dinamic, dacă fora p(t) este definită analitic şi este suficient de simplă pentru evaluarea analitică a integralei. Pentru
încărcări dinamice definite numeric la valori de timp discrete, integrala Duhamel poate fi integrată numeric.
Exemplu:
Să se determine răspunsul unui sistem SGLD neamortizat (c = 0), sub efectul unei fore de tip treaptă p(t)=p0 , t ≥ 0.
Pentru această încărcare dinamică, ecuaia (2.15) rezultă:
0 00
0 0
cos ( )1( ) sin[ ( )] (1 cos )
t t
n
n n
n n n
p t pu t p t d t
m m k
τ
τ
ω τ ω τ τ ω
ω ω ω
=
=
−= − = = −
∫
Acest rezultat este identic cu cel obinut prin metoda clasică.
Metode numerice
Metodele de rezolvare a ecuaiei de mişcare descrise anterior sunt aplicabile numai sistemelor liniar elasticeşi încărcărilor dinamice definite analitic. Analiza răspunsului dinamic al sistemelor inelastice şi a celor lacare încărcarea dinamică este prea complicată pentru a fi definită analitic, poate fi efectuată prin metodenumerice (calcul biografic).

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 12/149
2. Dinamica sistemelor cu un singur grad de libertate dinamică
11
2.2. Vibraii libere
Vibraiile libere ale unei structuri au loc atunci când structura este scoasă din poziia de echilibru static şilăsată să vibreze liber f ără vreo foră dinamică perturbatoare. Vibraiile libere au loc după ce cauza care ascos structura din starea de repaus a încetat.
2.2.1. Vibra ii libere neamortizate
Mişcarea unui sistem cu un singur grad de libertate dinamică (de exemplu cadrul portal discutat anterior) subaciunea unei fore dinamice p(t) este descrisă de ecuaia (2.6): ( )mu cu ku p t + + = . În cazul vibraiilorlibere neamortizate fora perturbatoare lipseşte p(t) = 0, la fel şi amortizarea (c = 0). Astfel, ecuaia demişcare devine:
0mu ku+ = (2.16)
Vibraiile libere apar ca urmare a scoaterii sistemului din echilibru, prin aplicarea masei unei deplasăriiniiale (0)u sau a unei viteze iniiale (0)u la timpul zero, definit ca şi timpul în care este iniiată mişcarea:
(0) (0)u u u u= = (2.17)
Folosind metoda clasică de rezolvare, soluia ecuaiei difereniale omogene (2.16) folosind condiiile iniiale(2.17) este:
(0)( ) (0)cos sinn n
n
uu t u t t ω ω
ω = +
(2.18)
unde s-a folosit notaia
n k mω = (2.19)
Ecuaia (2.18) este reprezentată în Figura 2.11, din care se poate observa că sistemul efectuează o mişcareoscilatorie faă de poziia de echilibru static şi că valoarea deplasării este aceeaşi la fiecare 2 nπ ω secunde.
Acest tip de mişcare poartă denumirea de mi şcare armonică simplă. Poriunea a-b-c-d-e a curbei deplasare-
timp descrie un ciclu complet de mişcare armonică a sistemului. Din poziia de echilibru static la punctul a,masa se deplasează în sens pozitiv, atingând deplasarea pozitivă maximă uo în punctul b, moment în careviteza este egală cu zero şi deplasarea începe să scadă, atingând poziia de echilibru static în punctul c, cândviteza devine maximă, astfel încât masa continuă să se deplaseze în sens negativ, atingând deplasareaminimă –uo în punctul d , moment în care viteza este din nou egală cu zero iar deplasarea începe să scadă dinnou, până când masa ajunge în poziia de echilibru static e.
Timpul în care un sistem cu un singur grad de libertate dinamică efectuează un ciclu complet de oscilaiilibere neamortizate se numeşte perioad ă proprie de vibra ie, se notează cu T n şi se măsoară în secunde.Relaia dintre aceasta şi frecven a circular ă proprie (sau pulsa ia proprie de vibra ie), care se măsoară înradiani pe secundă este:
2nn
T π ω = (2.20)
Frecven a proprie de vibra ie f n reprezintă numărul de oscilaii complete pe care îl efectuează sistemul într-osecundă, se măsoară în Hz şi este dată de următoarele relaii:
1n
n
f T
= (2.21)
2n
n f ω
π = (2.22)
Proprietăile de vibraie proprie nω , nT şi n f depind doar de masa şi rigiditatea structurii, conform ecuaiilor
(2.19) la (2.21). Odată cu creşterea rigidităii unei structuri perioada proprie de vibraie va scădea, iarfrecvena proprie de vibraie va creşte. În mod similar, creşterea masei unei structuri conduce la creştereaperioadei proprii de vibraie şi scăderea frecvenei proprii de vibraie. Termenul " propriu" folosit în

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 13/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
12
definiiile nω , nT şi n f se referă la faptul că acestea sunt proprietăi ale sistemului, depinzând doar de
caracteristicile acestuia.
Figura 2.11. Vibraii libere neamortizate ale unui sistem liniar elastic SGLD (Chopra, 2001).
Frecvena circulară proprie nω , frecvena proprie de vibraie n f şi perioada proprie de vibraie nT pot fi
exprimate într-o formă alternativă prin:
12
2st
n n nst st
g g f T
g
δ ω π
δ π δ = = = (2.23)
unde st mg k δ = , iar g este acceleraia gravitaională. Valoarea st δ reprezintă deformarea elastică a unuisistem SGLD atunci când asupra acestuia acionează o foră statică egală cu mg .
Deplasarea sistemului SGLD variază între valoarea maximă 0u şi cea minimă 0u− . Valoarea 0u se numeşteamplitudinea mişcării oscilatorii şi este dată de:
( )( )
22
0
00
n
uu u
ω
= +
(2.24)
Amplitudinea oscilaiilor depinde de deplasarea iniială ( )0u şi viteza iniială ( )0u , precum şi de
proprietăile structurii ( nω ).
2.2.2. Vibra ii libere amortizate
Mişcarea unui sistem cu un singur grad de libertate dinamică (de exemplu cadrul portal discutat anterior) subaciunea unei fore dinamice p(t) este descrisă de ecuaia (2.6): ( )mu cu ku p t + + = .
În cazul vibraiilor libere amortizate fora perturbatoare lipseşte p(t)=0, astfel încât ecuaia de mişcare (2.6)( )mu cu ku p t + + = devine:
0mu cu ku+ + = (2.25)
Împărind ecuaia (2.25) cu m obinem:
22 0n nu u uξω ω + + = (2.26)
unde n k mω = , conform definiiei anterioare şi
2 n cr
c c
m cξ
ω = = (2.27)
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 14/149
2. Dinamica sistemelor cu un singur grad de libertate dinamică
13
Ne vom referi la valoarea
22 2cr n
n
k c m kmω
ω = = = (2.28)
prin coeficientul de amortizare critică, iar ξ este frac iunea din amortizare critică.
Coeficientul de amortizare c este o măsură a energiei disipate de sistem într-un ciclu de oscilaii libere. Pe dealtă parte, fraciunea din amortizarea critică ξ este o măsură adimensională a amortizării, proprie unui
sistem şi care depinde inclusiv de masa şi rigiditatea acestuia.
Tipuri de mi şcare
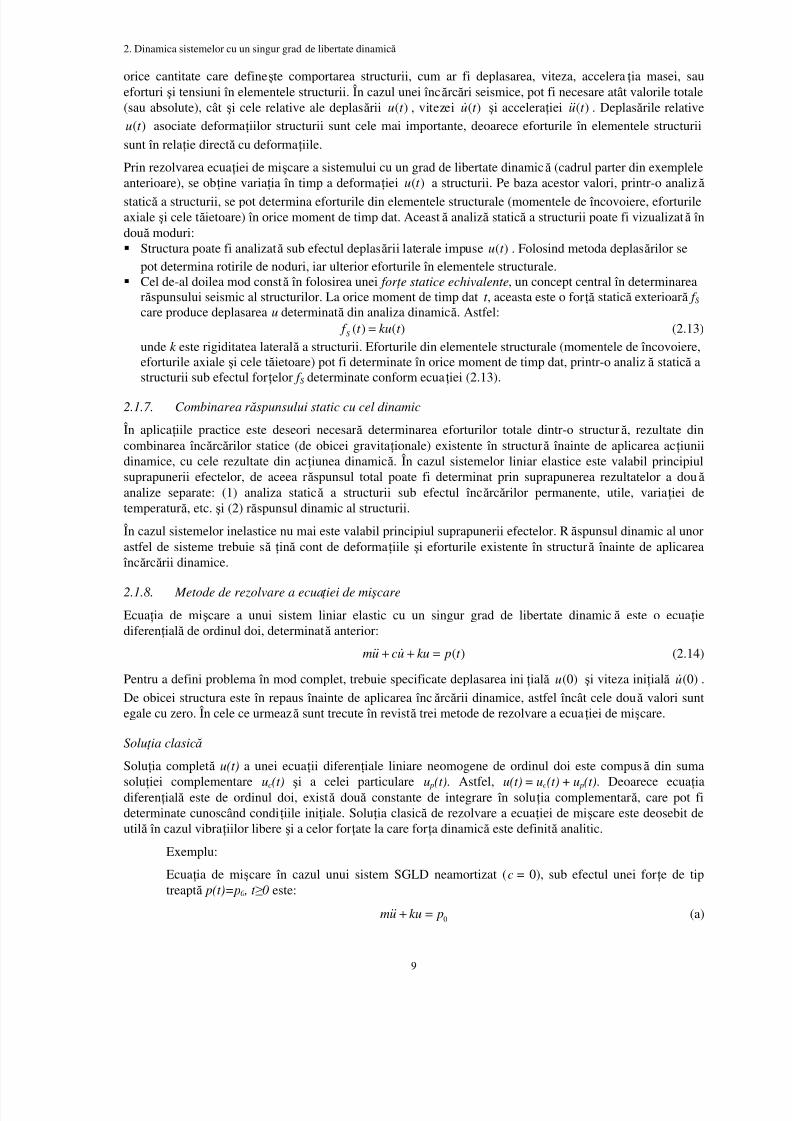
În Figura 2.12 sunt prezentate deformaiile u(t) ale unor sisteme SGLD supuse unei deplasări iniiale u(0)pentru trei valori ale ξ . Dacă c = ccr sau 1ξ = , sistemul revine la poziia de echilibru static f ără a efectuavreo oscilaie. Dacă c > ccr sau 1ξ > , sistemul revine la poziia de echilibru static f ără a efectua vreooscilaie, la fel ca în cazul 1ξ = , dar mai lent. Dacă c < ccr sau 1ξ < , sistemul oscilează faă de poziia de
echilibru static cu amplitudini care scad în timp.
Figura 2.12. Oscilaii libere ale unor sisteme cu amortizare subcritică, critică şi supracritică (Chopra, 2001)
Coeficientul ccr se numeşte coeficient de amortizare critică deoarece aceasta este valoarea cea mai mică acoeficientului de amortizare care preîntâmpină complet oscilaiile. Acesta delimitează zona dintre mişcareaoscilatorie şi cea neoscilatorie.
Majoritatea structurilor inginereşti (clădiri, poduri, baraje, structuri marine, etc.) sunt caracterizate de oamortizare subcritică (c < ccr ), cu fraciuni din amortizarea critică sub 0.1. De aceea, în continuare ne vomreferi doar la acest tip de sisteme, în contextul ingineriei civile existând puine raiuni pentru studiuldinamicii structurilor cu amortizare critică (c = ccr ) sau a celor cu amortizare supracritică (c > ccr ).
Sisteme cu amortizare subcritică
Soluia ecuaiei (2.25) inând cont de condiiile iniiale (2.17) pentru sisteme cu c<ccr sau 1ξ < este:
(0) (0)( ) (0)cos sinnt n
D D D
u uu t e u t t ξω ξω
ω ω ω
− +
= +
(2.29)
unde s-a folosit notaia:
21 D nω ω ξ = − (2.30)
Se poate observa că înlocuind 0ξ = în ecuaia (2.29), aceasta se reduce la ecuaia (2.18), ce caracterizează
sisteme neamortizate.Ecuaia (2.29) reprezentând oscilaiile libere ale unui sistem SGLD cu o amortizare 0.05ξ = sau 5% esteprezentată în Figura 2.13. Pentru comparaie este inclusă şi reprezentarea oscilaiilor unui sistem SGLD care
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 15/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
14
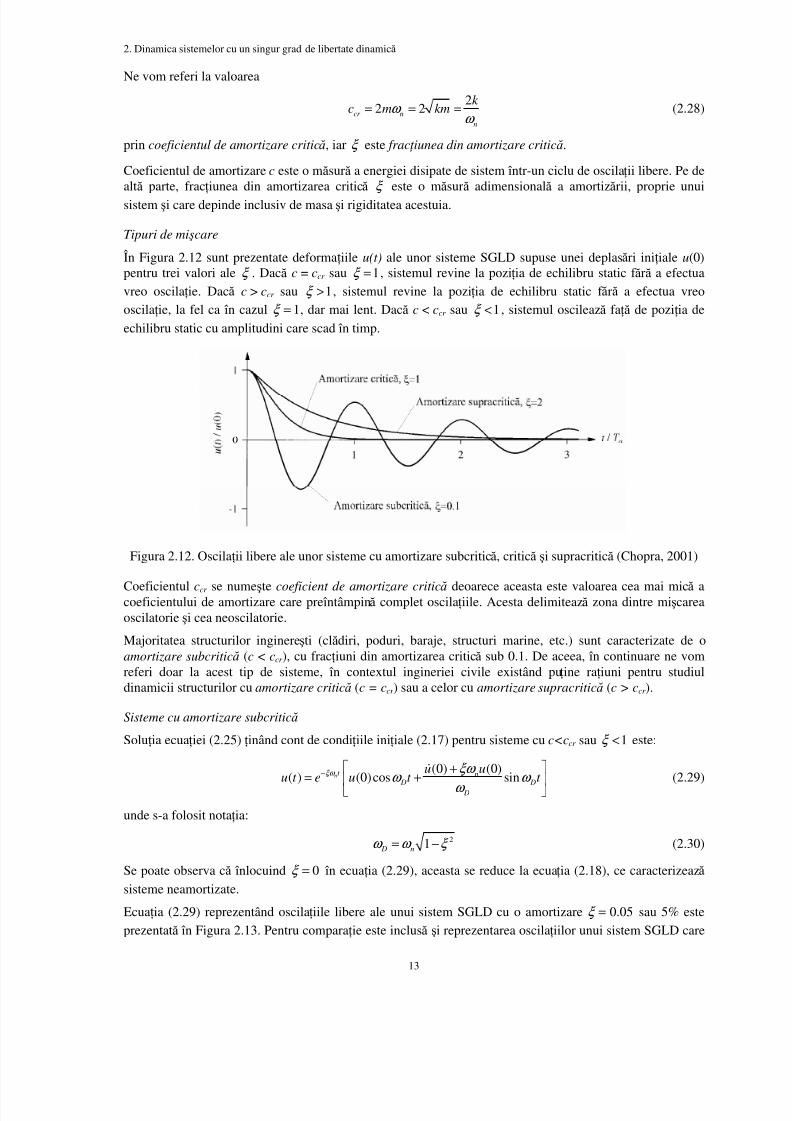
efectuează oscilaii libere neamortizate. Oscilaiile libere sunt iniiate de aceeaşi deplasare iniială (0)u şiviteză iniială (0)u . Din ecuaia (2.29) şi Figura 2.13 se poate observa că frecven a circular ă a oscila iilor
amortizate este Dω şi că aceasta depinde de frecvena circulară proprie a oscilaiilor libere neamortizate nω
prin intermediul relaiei (2.30). În mod similar, perioada vibra iilor amortizate 2 D DT π ω = depinde de
perioada proprie a oscilaiilor neamortizate T n prin relaia:
21n
D T T ξ
=
−
(2.31)
Figura 2.13. Comparaie între oscilaii libere amortizate şi neamortizate (Chopra, 2001).
În timp ce amplitudinea oscilaiilor neamortizate este aceeaşi în toate ciclurile, amplitudinea mişcăriiamortizate scade cu fiecare ciclu de oscilaie. Ecuaia (2.29) indică faptul că amplitudinea mişcăriiamortizate scade exponenial cu timpul. Înf ăşurătoarea mişcării de oscilaii amortizate este t e ξω ρ −
± , unde:
( )( ) 2
2 0 (0)0 n
D
u uu
ξω ρ
ω
+ = +
(2.32)
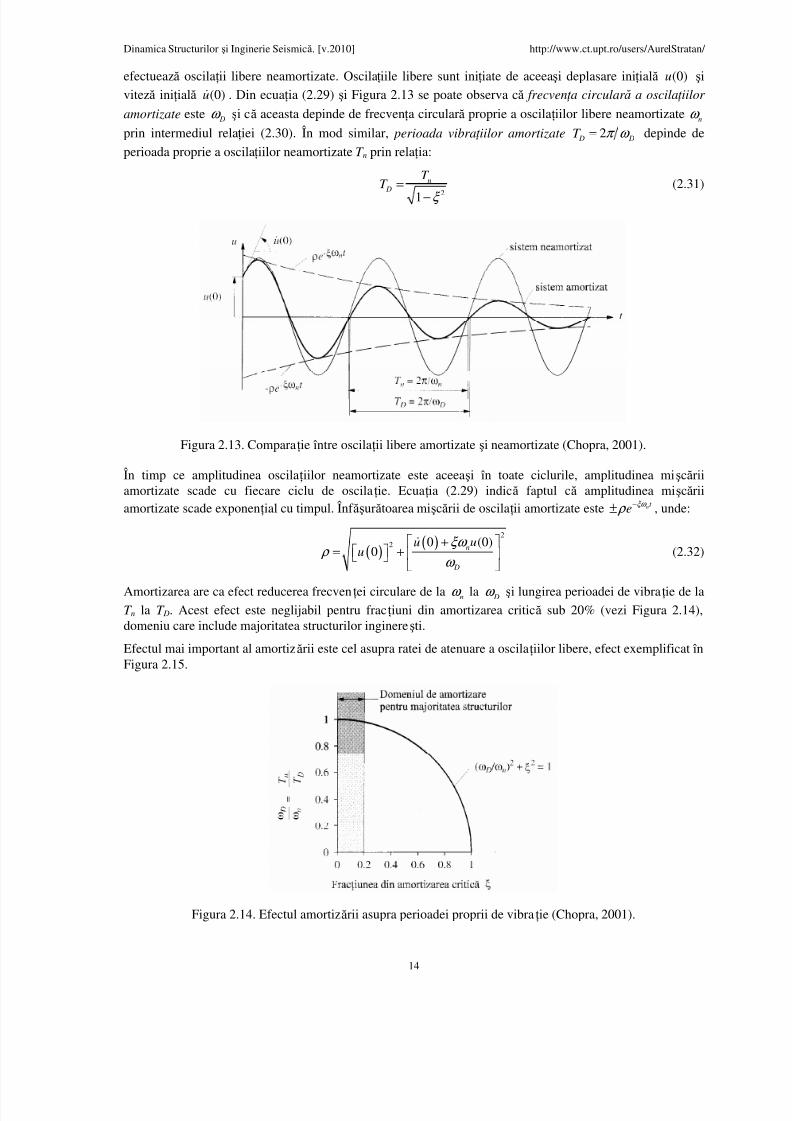
Amortizarea are ca efect reducerea frecvenei circulare de la nω la Dω şi lungirea perioadei de vibraie de la
T n la T D. Acest efect este neglijabil pentru fraciuni din amortizarea critică sub 20% (vezi Figura 2.14),domeniu care include majoritatea structurilor inginereşti.
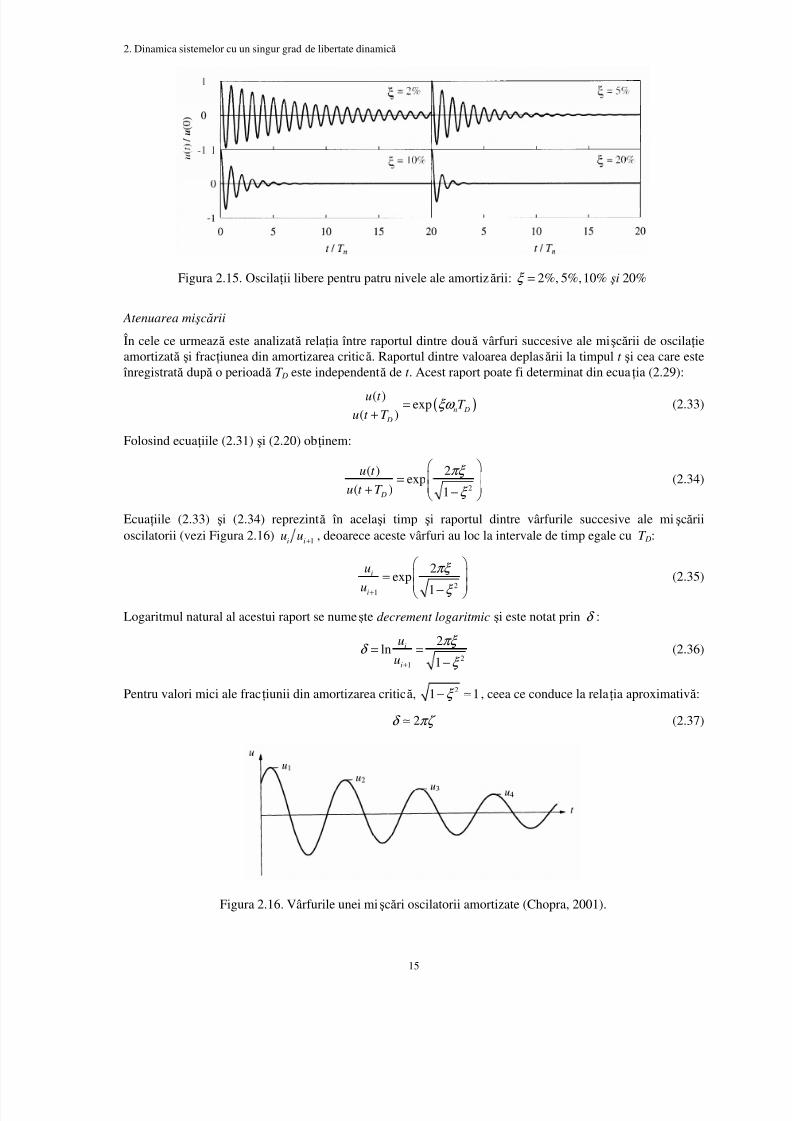
Efectul mai important al amortizării este cel asupra ratei de atenuare a oscilaiilor libere, efect exemplificat înFigura 2.15.
Figura 2.14. Efectul amortizării asupra perioadei proprii de vibraie (Chopra, 2001).
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 16/149
2. Dinamica sistemelor cu un singur grad de libertate dinamică
15
Figura 2.15. Oscilaii libere pentru patru nivele ale amortizării: 2%, 5%,10% 20% şiξ =
Atenuarea mi şcării
În cele ce urmează este analizată relaia între raportul dintre două vârfuri succesive ale mişcării de oscilaie
amortizată şi fraciunea din amortizarea critică. Raportul dintre valoarea deplasării la timpul t şi cea care este înregistrată după o perioadă T D este independentă de t . Acest raport poate fi determinat din ecuaia (2.29):
( )( )
exp( ) n D
D
u t T
u t T ξω =
+(2.33)
Folosind ecuaiile (2.31) şi (2.20) obinem:
2
( ) 2exp
( ) 1 D
u t
u t T
πξ
ξ
= + −
(2.34)
Ecuaiile (2.33) şi (2.34) reprezintă în acelaşi timp şi raportul dintre vârfurile succesive ale mişcării
oscilatorii (vezi Figura 2.16) 1i iu u + , deoarece aceste vârfuri au loc la intervale de timp egale cu T D:
21
2exp
1
i
i
u
u
πξ
ξ +
=
−
(2.35)
Logaritmul natural al acestui raport se numeşte decrement logaritmic şi este notat prin δ :
21
2ln
1
i
i
u
u
πξ δ
ξ +
= =
−
(2.36)
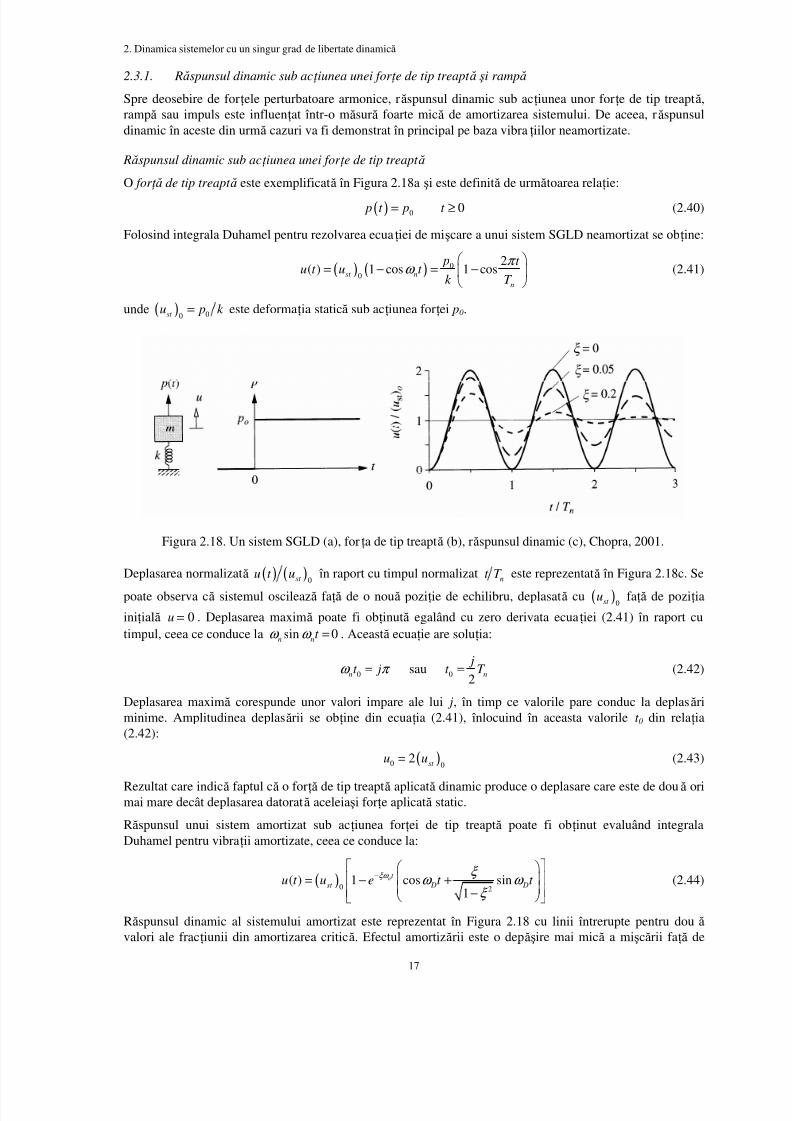
Pentru valori mici ale fraciunii din amortizarea critică, 21 1ξ − , ceea ce conduce la relaia aproximativă:
2δ πζ (2.37)
Figura 2.16. Vârfurile unei mişcări oscilatorii amortizate (Chopra, 2001).

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 17/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
16
În Figura 2.17 sunt indicate relaiile exacte şi aproximative între decrementul logaritmic δ şi fraciunea deamortizare critică ξ . Se poate concluziona că relaia (2.37) este valabilă pentru 0.2ξ < , caz care acoperă
majoritatea situaiilor practice.
În cazurile în care atenuarea mişcării se produce lent, datorită unei amortizări mici a structurii, este utilă determinarea decrementului logaritmic pe baza unor vârfuri aflate la câteva perioade. Pe durata a j oscilaiiamplitudinea mişcării se diminuează de la u1 la u1+j. Acest raport este dat de:
31 1 2
1 2 3 4 1
j j
j j
uuu u ue
u u u u uδ
+ +
= =
De unde:
( ) ( )1 11 ln 2 j j u uδ πξ +
= (2.38)
Figura 2.17. Relaia exactă şi cea aproximativă între decrementul logaritmic şi fraciunea de amortizarecritică, (Chopra, 2001).
Încercări de vibra ii libere amortizate
Pentru structuri inginereşti practice, determinarea analitică a fraciunii din amortizarea critică ξ nu este
posibilă, de aceea această proprietate se determină experimental. Încercările experimentale de oscilaii libereamortizate pe structuri reale reprezintă una dintre modalităile de determinare practică a amortizării. Pentrusisteme cu o amortizare mică, fraciunea din amortizarea critică poate fi determinată din relaiile:
1 1ln ln
2 2i i
i j i j
u usau
j u j uξ ξ
π π + +
= =
(2.39)
Prima dintre aceste relaii este echivalentă cu ecuaia (2.38), iar cea de-a doua este o relaie similară, fiindexprimată în termeni de acceleraie (mai uşor de înregistrat experimental decât deplasările), şi care poate fidemonstrată a fi adevărată pentru structuri slab amortizate.
2.3. Vibraii forate
Forele dinamice care pot fi aplicate structurilor inginereşti au diverse forme. În acest capitol vor fi analizatedouă clase de aciuni dinamice. Prima dintre acestea reprezintă forele care variază arbitrar în timp, spreexemplu cele de tip treaptă şi şoc. Cea de-a doua categorie de aciuni dinamice sunt forele armonice şiperiodice, care pot să apară, spre exemplu, ca urmare a funcionării unor dispozitive rotative amplasate.
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 18/149
2. Dinamica sistemelor cu un singur grad de libertate dinamică
17
2.3.1. Răspunsul dinamic sub ac iunea unei for e de tip treapt ă şi rampă
Spre deosebire de forele perturbatoare armonice, răspunsul dinamic sub aciunea unor fore de tip treaptă,rampă sau impuls este influenat într-o măsură foarte mică de amortizarea sistemului. De aceea, răspunsuldinamic în aceste din urmă cazuri va fi demonstrat în principal pe baza vibraiilor neamortizate.
Răspunsul dinamic sub ac iunea unei for e de tip treapt ă
O for ă de tip treapt ă este exemplificată în Figura 2.18a şi este definită de următoarea relaie:
( ) 0 0 p t p t = ≥ (2.40)
Folosind integrala Duhamel pentru rezolvarea ecuaiei de mişcare a unui sistem SGLD neamortizat se obine:
( ) ( ) 00
2( ) 1 cos 1 cosst n
n
p t u t u t
k T
π ω
= − = −
(2.41)
unde ( ) 00st u p k = este deformaia statică sub aciunea forei p0.
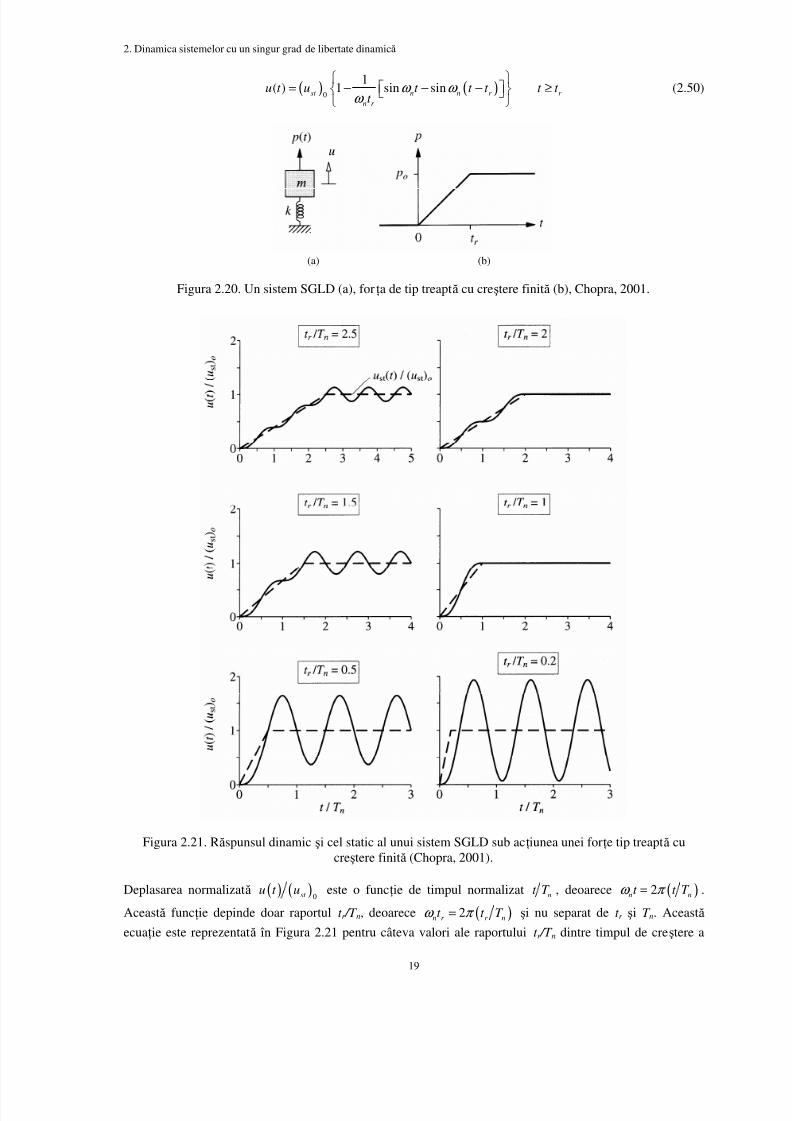
Figura 2.18. Un sistem SGLD (a), fora de tip treaptă (b), răspunsul dinamic (c), Chopra, 2001.
Deplasarea normalizată ( ) ( )0st u t u în raport cu timpul normalizat nt T este reprezentată în Figura 2.18c. Se
poate observa că sistemul oscilează faă de o nouă poziie de echilibru, deplasată cu ( )0st u faă de poziia
iniială 0u = . Deplasarea maximă poate fi obinută egalând cu zero derivata ecuaiei (2.41) în raport cutimpul, ceea ce conduce la sin 0n nt ω ω = . Această ecuaie are soluia:
0nt jω π = sau 0 2 n
jt T = (2.42)
Deplasarea maximă corespunde unor valori impare ale lui j, în timp ce valorile pare conduc la deplasări
minime. Amplitudinea deplasării se obine din ecuaia (2.41), înlocuind în aceasta valorile t 0 din relaia(2.42):
( )0 02 st u u= (2.43)
Rezultat care indică faptul că o foră de tip treaptă aplicată dinamic produce o deplasare care este de două orimai mare decât deplasarea datorată aceleiaşi fore aplicată static.
Răspunsul unui sistem amortizat sub aciunea forei de tip treaptă poate fi obinut evaluând integralaDuhamel pentru vibraii amortizate, ceea ce conduce la:
( )02
( ) 1 cos sin
1
nt st D Du t u e t t ξω ξ
ω ω
ξ
−
= − +
−
(2.44)
Răspunsul dinamic al sistemului amortizat este reprezentat în Figura 2.18 cu linii întrerupte pentru dou ă valori ale fraciunii din amortizarea critică. Efectul amortizării este o depăşire mai mică a mişcării faă de

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 19/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
18
poziia statică şi o descreştere în timp a vibraiilor. Valoarea amortizării controlează mărimea depăşirii şi ratacu care scad amplitudinile vibraiilor. După un timp suficient de mare, vibraiile încetează, fapt carereprezintă stadiul staionar.
Răspunsul dinamic sub ac iunea unei for e de tip rampă
O for ă de tip rampă este exemplificată în Figura 2.19a şi este definită de următoarea relaie:
( ) 0 0r
t p t p t t
= ≥ (2.45)
Folosind integrala Duhamel pentru rezolvarea ecuaiei de mişcare a unui sistem SGLD neamortizat se obine:
( ) ( )0 0
sin sin 2( )
2n n n
st st r n r n r r n
t T t T t t u t u u
t t T t t T
ω π
ω π
= − = −
(2.46)
unde ( ) 00st u p k = este deformaia statică sub aciunea forei p0.
Ecuaia (2.46) este reprezentată grafic în Figura 2.19c pentru t r /T n=2.5, împreună cu deformaia statică înmomentul t :
( )( )
( )0st st r
p t t u t u
k t = = (2.47)
Se poate observa că sistemul dinamic oscilează cu perioada T n faă de poziia de echilibru static.
(a) (b) (c)
Figura 2.19. Un sistem SGLD (a), fora de tip rampă (b), răspunsul dinamic şi cel static (c),Chopra, 2001.
Răspunsul dinamic sub ac iunea unei for e de tip treapt ă cu cre ştere finit ă
Deoarece în realitate o foră nu poate fi aplicată instantaneu, prezintă interes analiza răspunsului dinamic alunei fore care are o creştere finită t r , dar rămâne constantă după atingerea acestei valori. O astfel de foră este exemplificată în Figura 2.20a:
( )( )0
0
0r r
r
p t t t t p t
p t t
≤ ≤=
≥(2.48)
Această aciune dinamică are două faze: faza de rampă şi faza constantă.
Expresia deplasării în faza de rampă este cea identică relaiei (2.46):
( )0
sin( ) n
st r
r n r
t t u t u t t
t t
ω
ω
= − ≤
(2.49)
iar răspunsul în faza constantă poate fi determinat înlocuind relaia (2.48) în ecuaia (2.15):
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 20/149
2. Dinamica sistemelor cu un singur grad de libertate dinamică
19
( ) ( )0
1( ) 1 sin sinst n n r r
n r
u t u t t t t t t
ω ω ω
= − − − ≥
(2.50)
(a) (b)
Figura 2.20. Un sistem SGLD (a), fora de tip treaptă cu creştere finită (b), Chopra, 2001.
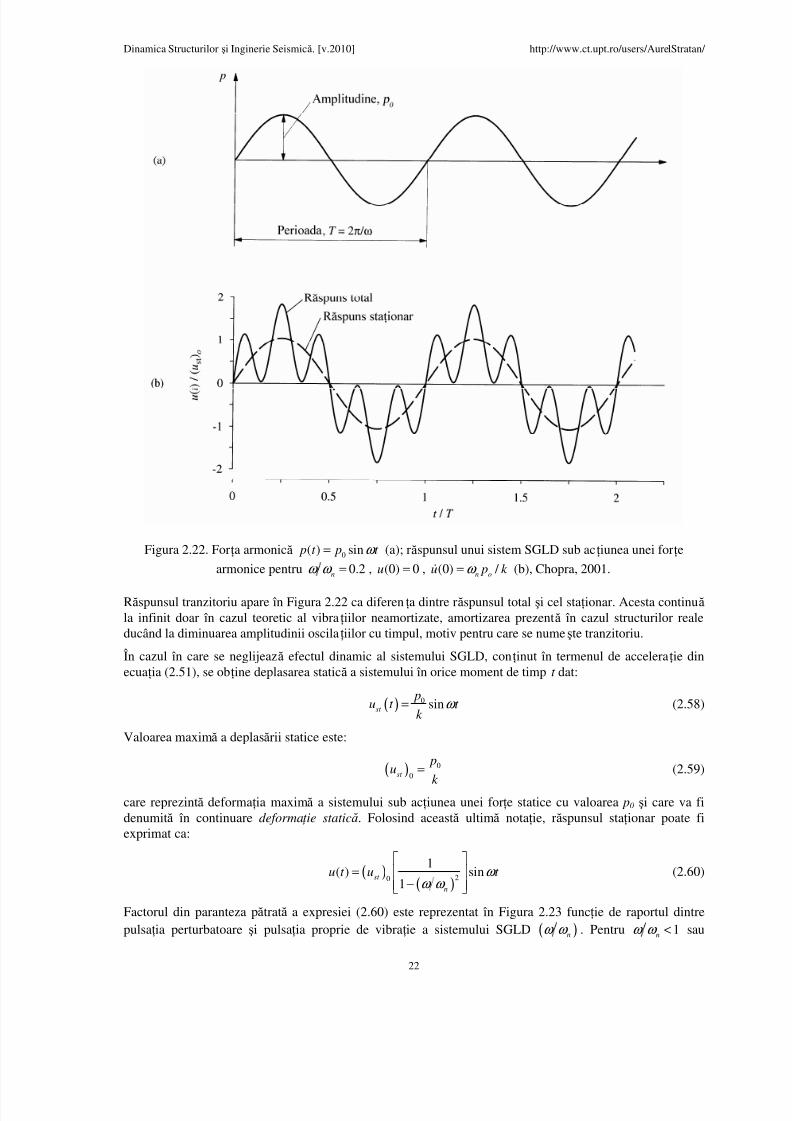
Figura 2.21. Răspunsul dinamic şi cel static al unui sistem SGLD sub aciunea unei fore tip treaptă cucreştere finită (Chopra, 2001).
Deplasarea normalizată ( ) ( )0st u t u este o funcie de timpul normalizat nt T , deoarece ( )2n nt t T ω π = .Această funcie depinde doar raportul t r /T n, deoarece ( )2n r r nt t T ω π = şi nu separat de t r şi T n. Această
ecuaie este reprezentată în Figura 2.21 pentru câteva valori ale raportului t r /T n dintre timpul de creştere a

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 21/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
20
forei şi perioada proprie a sistemului, împreună cu răspunsul static ( ) ( )st u t p t k = . Aceste rezultate permit
următoarele observaii: În timpul creşterii forei (faza de rampă) sistemul oscilează faă de poziia de echilibru static cu perioada
proprie de vibraie T n Pentru zona de foră constantă (faza constantă) sistemul se comportă similar, oscilând faă de poziia de
echilibru static cu perioada proprie de vibraie T n Dacă viteza este egală cu zero la finalul fazei de rampă ( ) 0r u t = , sistemul nu oscilează în timpul fazei de
foră constantă Pentru valori mici ale raportului t r /T n (timpi mici de creştere a forei) răspunsul este similar cu cel datorat
unei fore de tip treaptă (vezi Figura 2.20c) Pentru valori mari ale raportului t r /T n răspunsul dinamic este apropiat de poziia de echilibru static, ceea
ce semnifică un efect dinamic scăzut.

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 22/149
2. Dinamica sistemelor cu un singur grad de libertate dinamică
21
2.3.2. Vibra ii for ate ale sistemelor SGLD produse de for e armonice
O foră armonică are forma 0( ) sin p t p t ω = sau 0( ) cos p t p t ω = , unde p0 reprezintă amplitudinea forei
perturbatoare, iar ω pulsaia acesteia, căreia îi corespunde perioada 2T π ω = (vezi Figura 2.22a). În cele ce
urmează se va prezenta răspunsul unui sistem cu un singur grad de libertate dinamică sub aciunea unei încărcări de tip sinus, răspunsul la o încărcare dinamică de tip cosinus fiind similar cu acesta.
În cazul unor vibraii neamortizate generate de o foră perturbatoare armonică de forma 0( ) sin p t p t ω = ,
ecuaia de mişcare (2.6) devine:
0 sinmu ku p t ω + = (2.51)
Deformaia u(t) a sistemului SGLD poate fi obinută rezolvând ecuaia (2.51) pentru condiiile iniiale:
(0) (0)u u u u= = (2.52)
unde (0)u şi (0)u sunt deplasarea, respectiv viteza în momentul de timp în care este aplicată fora dinamică p(t). Soluia particulară a ecuaiei (2.51) este:
( )0 21( ) sin1
p n
n
pu t t
k ω ω ω
ω ω = ≠
−(2.53)
Soluia complementară a ecuaiei (2.51) este:
( ) cos sinc n n
u t A t B t ω ω = + (2.54)
Soluia completă fiind suma soluiei particulare şi a celei complementare, obinem:
( )0
2
1( ) cos sin sin
1n n
n
pu t A t B t t
k ω ω ω
ω ω = + +
−
(2.55)
Folosind condiiile iniiale (2.52) se obine soluia finală:
( )( )
( ) ( )0 0
2 2
0 / 1( ) 0 cos sin sin
1 1n
n n
n n n
u p pu t u t t t
k k
ω ω ω ω ω
ω ω ω ω ω
= + − +
− −
(2.56)
răspuns tranzitoriu răspuns staionar
Ecuaia (2.56) este reprezentată în Figura 2.22b pentru 0.2n
ω ω = , (0) 0u = , (0) / n o
u p k ω = cu linie
continuă. Termenul din ecuaia (2.56) care include sin t ω reprezintă soluia particulară a ecuaiei de mişcare(2.51), aceasta din urmă fiind reprezentată cu linie întreruptă în Figura 2.22b.
Pe baza ecuaiei (2.56) şi folosind Figura 2.22b se poate observa că deplasarea u(t) are două componentedistincte de vibraie: o mişcare oscilatorie cu frecvena egală cu cea a forei perturbatoare, definită de termenul coninând
sin t ω o mişcare oscilatorie la frecvena proprie de vibraie a sistemului, definită de termenii coninând cos
nt ω
şi sinnt ω
Prima dintre aceste componente se numeşte r ăspuns sta ionar sau for at , deoarece acesta se datorează foreidinamice aplicate şi nu este influenat de condiiile iniiale. Cea de-a doua componentă poartă denumirea der ăspuns tranzitoriu, care depinde de deplasarea şi viteza iniială, precum şi de proprietăile sistemului SGLDşi de fora perturbatoare. Răspunsul tranzitoriu există chiar şi pentru (0) (0) 0u u= = , caz în care ecuaia
(2.56) devine:
( )0 21( ) sin sin1
n
nn
pu t t t
k ω ω ω ω ω ω
= −
− (2.57)
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 23/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
22
Figura 2.22. Fora armonică 0( ) sin p t p t ω = (a); răspunsul unui sistem SGLD sub aciunea unei fore
armonice pentru 0.2n
ω ω = , (0) 0u = , (0) / n o
u p k ω = (b), Chopra, 2001.
Răspunsul tranzitoriu apare în Figura 2.22 ca diferena dintre răspunsul total şi cel staionar. Acesta continuă la infinit doar în cazul teoretic al vibraiilor neamortizate, amortizarea prezentă în cazul structurilor realeducând la diminuarea amplitudinii oscilaiilor cu timpul, motiv pentru care se numeşte tranzitoriu.
În cazul în care se neglijează efectul dinamic al sistemului SGLD, coninut în termenul de acceleraie dinecuaia (2.51), se obine deplasarea statică a sistemului în orice moment de timp t dat:
( ) 0 sinst
pu t t
k ω = (2.58)
Valoarea maximă a deplasării statice este:
( ) 00st
pu
k = (2.59)
care reprezintă deformaia maximă a sistemului sub aciunea unei fore statice cu valoarea p0 şi care va fidenumită în continuare deforma ie statică. Folosind această ultimă notaie, răspunsul staionar poate fiexprimat ca:
( )( )
20
1( ) sin
1st
n
u t u t ω ω ω
=
−
(2.60)
Factorul din paranteza pătrată a expresiei (2.60) este reprezentat în Figura 2.23 funcie de raportul dintrepulsaia perturbatoare şi pulsaia proprie de vibraie a sistemului SGLD ( )n
ω ω . Pentru 1nω ω < sau

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 24/149
2. Dinamica sistemelor cu un singur grad de libertate dinamică
23
nω ω < acest factor este pozitiv, indicând faptul că deplasarea u(t) şi fora perturbatoare p(t) au acelaşi semn
algebric (sistemul se deplasează în acelaşi sens în care acionează fora). În acest caz se spune că deplasareaeste în fază cu fora perturbatoare. Pentru 1n
ω ω > sau nω ω > acest factor este negativ, indicând faptul că
deplasarea u(t) şi fora perturbatoare p(t) au semne algebrice opuse (sistemul se deplasează în direcie opusă sensului în care acionează fora). În acest caz deplasarea este defazat ă faă de fora perturbatoare.
Figura 2.23. Reprezentarea factorului( )
2
1
1 nω ω −
funcie de raportul nω ω (Chopra, 2001).
Noiunea de fază poate fi descrisă matematic prin exprimarea relaiei (2.60) în funcie de amplitudinea u0 adeplasării u(t) şi a unghiului de fază φ în următoarea formă:
( ) ( ) ( )0 0( ) sin sinst d u t u t u R t ω φ ω φ = − = − (2.61)
unde
( ) ( )
02
0
01
1
n
d
nst n
u R şi
u
ω ω φ
π ω ω ω ω
<= = =
>− (2.62)
Pentrun
ω ω < unghiul de fază φ = 0, indicând faptul că deplasarea u(t) variază proporional cu sin t ω , în
fază cu fora perturbatoare p(t). Pentru nω ω > unghiul de fază φ = π , indicând faptul că deplasarea u(t)
variază proporional cu sin t ω − , defazat faă de fora perturbatoare p(t). Variaia unghiului de fază funcie deraportul nω ω este reprezentată în Figura 2.24.
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 25/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
24
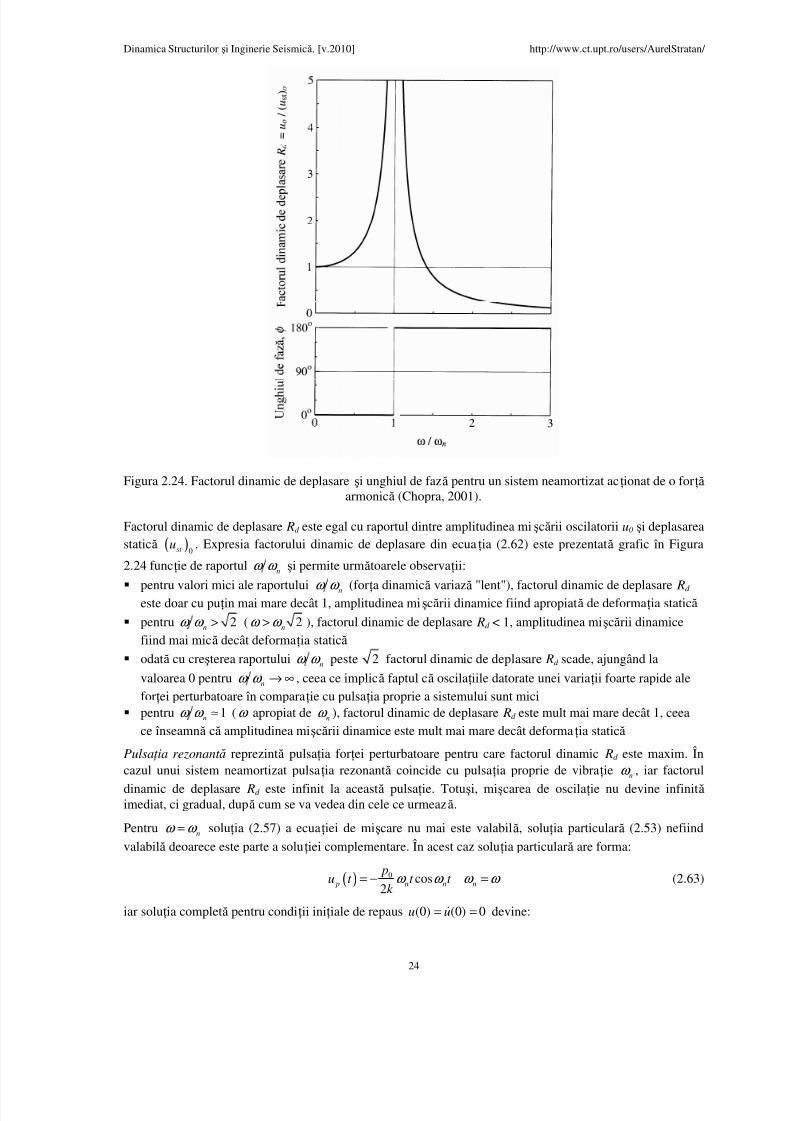
Figura 2.24. Factorul dinamic de deplasare şi unghiul de fază pentru un sistem neamortizat acionat de o foră armonică (Chopra, 2001).
Factorul dinamic de deplasare Rd este egal cu raportul dintre amplitudinea mişcării oscilatorii u0 şi deplasareastatică ( )
0st u . Expresia factorului dinamic de deplasare din ecuaia (2.62) este prezentată grafic în Figura
2.24 funcie de raportuln
ω ω şi permite următoarele observaii:
pentru valori mici ale raportuluin
ω ω (fora dinamică variază "lent"), factorul dinamic de deplasare Rd este doar cu puin mai mare decât 1, amplitudinea mişcării dinamice fiind apropiată de deformaia statică
pentru 2n
ω ω > ( 2n
ω ω > ), factorul dinamic de deplasare Rd < 1, amplitudinea mişcării dinamicefiind mai mică decât deformaia statică
odată cu creşterea raportuluin
ω ω peste 2 factorul dinamic de deplasare Rd scade, ajungând la
valoarea 0 pentrun
ω ω → ∞ , ceea ce implică faptul că oscilaiile datorate unei variaii foarte rapide aleforei perturbatoare în comparaie cu pulsaia proprie a sistemului sunt mici
pentru 1nω ω ( ω apropiat de nω ), factorul dinamic de deplasare Rd este mult mai mare decât 1, ceeace înseamnă că amplitudinea mişcării dinamice este mult mai mare decât deformaia statică
Pulsa ia rezonant ă reprezintă pulsaia forei perturbatoare pentru care factorul dinamic Rd este maxim. Încazul unui sistem neamortizat pulsaia rezonantă coincide cu pulsaia proprie de vibraie nω , iar factorul
dinamic de deplasare Rd este infinit la această pulsaie. Totuşi, mişcarea de oscilaie nu devine infinită imediat, ci gradual, după cum se va vedea din cele ce urmează.
Pentrun
ω ω = soluia (2.57) a ecuaiei de mişcare nu mai este valabilă, soluia particulară (2.53) nefiind
valabilă deoarece este parte a soluiei complementare. În acest caz soluia particulară are forma:
( ) 0 cos
2 p n n n
pu t t t
k
ω ω ω ω = − = (2.63)
iar soluia completă pentru condiii iniiale de repaus (0) (0) 0u u= = devine:
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 26/149
2. Dinamica sistemelor cu un singur grad de libertate dinamică
25
( )01( ) cos sin
2 n n n
pu t t t t
k ω ω ω = − − (2.64)
sau
( )0
( ) 1 2 2 2cos sin
2st n n n
u t t t t
u T T T
π π π = − −
(2.65)
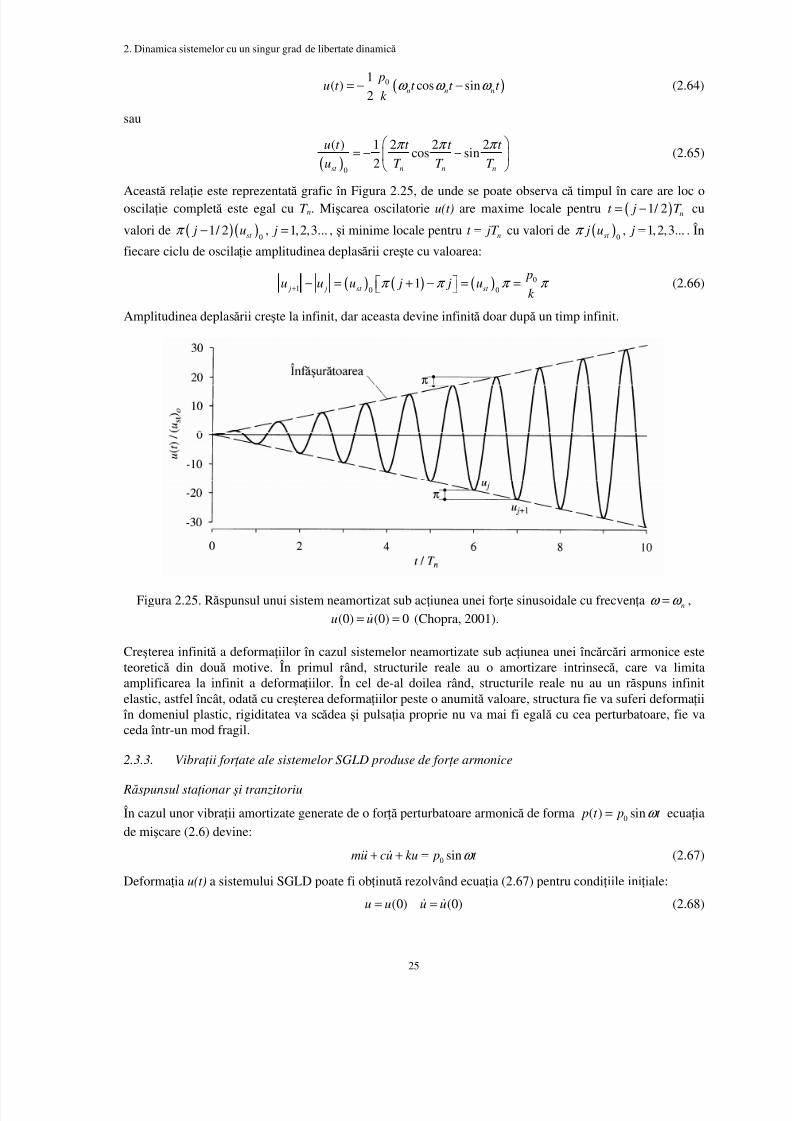
Această relaie este reprezentată grafic în Figura 2.25, de unde se poate observa că timpul în care are loc ooscilaie completă este egal cu T n. Mişcarea oscilatorie u(t) are maxime locale pentru ( )1/ 2 n
t j T = − cu
valori de ( )( )0
1/ 2 , 1,2,3...st j u jπ − = , şi minime locale pentru nt jT = cu valori de ( )
0, 1,2,3...st j u jπ = . În
fiecare ciclu de oscilaie amplitudinea deplasării creşte cu valoarea:
( ) ( ) ( ) 01 0 0
1 j j st st
pu u u j j u
k π π π π
+− = + − = = (2.66)
Amplitudinea deplasării creşte la infinit, dar aceasta devine infinită doar după un timp infinit.
Figura 2.25. Răspunsul unui sistem neamortizat sub aciunea unei fore sinusoidale cu frecvena nω ω = ,(0) (0) 0u u= = (Chopra, 2001).
Creşterea infinită a deformaiilor în cazul sistemelor neamortizate sub aciunea unei încărcări armonice esteteoretică din două motive. În primul rând, structurile reale au o amortizare intrinsecă, care va limitaamplificarea la infinit a deformaiilor. În cel de-al doilea rând, structurile reale nu au un răspuns infinitelastic, astfel încât, odată cu creşterea deformaiilor peste o anumită valoare, structura fie va suferi deformaii
în domeniul plastic, rigiditatea va scădea şi pulsaia proprie nu va mai fi egală cu cea perturbatoare, fie vaceda într-un mod fragil.
2.3.3. Vibra ii for ate ale sistemelor SGLD produse de for e armonice
Răspunsul sta ionar şi tranzitoriu
În cazul unor vibraii amortizate generate de o foră perturbatoare armonică de forma 0( ) sin p t p t ω = ecuaia
de mişcare (2.6) devine:
0 sinmu cu ku p t ω + + = (2.67)
Deformaia u(t) a sistemului SGLD poate fi obinută rezolvând ecuaia (2.67) pentru condiiile iniiale:
(0) (0)u u u u= = (2.68)
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 27/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
26
unde (0)u şi (0)u sunt deplasarea, respectiv viteza în momentul de timp în care este aplicată fora dinamică
p(t). Soluia particulară a ecuaiei (2.67) este:
( ) sin cos pu t C t D t ω ω = + (2.69)
unde
( )( ) ( )
( )
( ) ( )
2
02 22
02 22
11 2
2
1 2
n
n n
n
n n
pC k
p D
k
ω ω ω ω ξ ω ω
ξ ω ω
ω ω ξ ω ω
−
=
− +
−
=
− +
(2.70)
Soluia complementară a ecuaiei (2.67) este identică cu soluia ce caracterizează oscilaiile libere amortizate:
( )( ) cos sinnt
c D Du t e A t B t
ξω ω ω −
= + (2.71)
unde 21 D nω ω ξ = − . Soluia completă a ecuaiei (2.67) este:
( )( ) cos sin sin cosnt
D Du t e A t B t C t D t
ξω ω ω ω ω −
= + + + (2.72)
răspuns tranzitoriu răspuns staionar
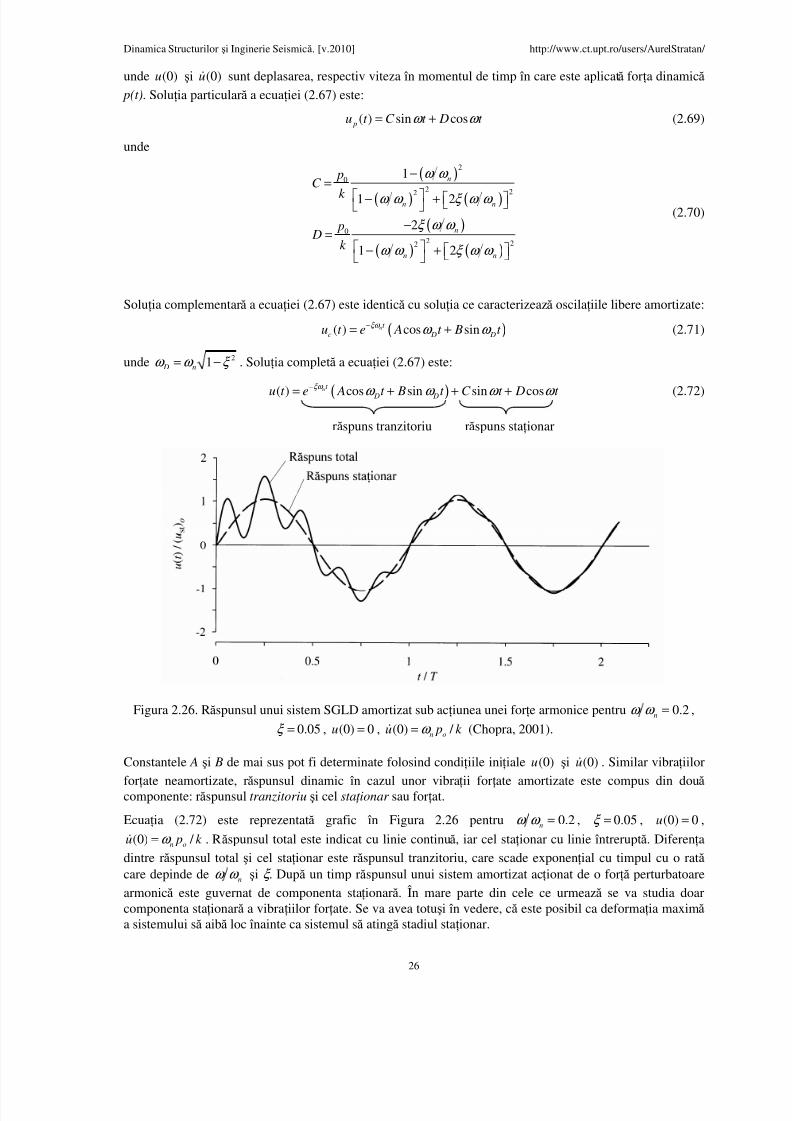
Figura 2.26. Răspunsul unui sistem SGLD amortizat sub aciunea unei fore armonice pentru 0.2nω ω = ,0.05ξ = , (0) 0u = , (0) / n o
u p k ω = (Chopra, 2001).
Constantele A şi B de mai sus pot fi determinate folosind condiiile iniiale (0)u şi (0)u . Similar vibraiilor
forate neamortizate, răspunsul dinamic în cazul unor vibraii forate amortizate este compus din două componente: răspunsul tranzitoriu şi cel sta ionar sau forat.
Ecuaia (2.72) este reprezentată grafic în Figura 2.26 pentru 0.2nω ω = , 0.05ξ = , (0) 0u = ,
(0) / n ou p k ω = . Răspunsul total este indicat cu linie continuă, iar cel staionar cu linie întreruptă. Diferena
dintre răspunsul total şi cel staionar este răspunsul tranzitoriu, care scade exponenial cu timpul cu o rată care depinde de n
ω ω şi ξ . După un timp răspunsul unui sistem amortizat acionat de o foră perturbatoare
armonică este guvernat de componenta staionară. În mare parte din cele ce urmează se va studia doarcomponenta staionară a vibraiilor forate. Se va avea totuşi în vedere, că este posibil ca deformaia maximă a sistemului să aibă loc înainte ca sistemul să atingă stadiul staionar.
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 28/149
2. Dinamica sistemelor cu un singur grad de libertate dinamică
27
Răspunsul pentru ω = ω n
În continuare se va examina rolul amortizării în reducerea vibraiilor tranzitorii şi în limitarea vibraiilorstaionare pentru cazul în care pulsaia forei perturbatoare este egală cu pulsaia proprie a sistemului. Pentru
nω ω = constantele C şi D din ecuaia (2.70) devin C=0 şi ( )0
2st D u ξ = − . Pentru nω ω = şi condiii
iniiale de repaus, constantele A şi B din ecuaia (2.72) pot fi determinate a fi ( )02st A u ξ = şi
( ) 20 2 1st B u ξ = − . Înlocuind valorile constantelor A, B, C şi D în ecuaia (2.72), aceasta devine:
( )0 2
1( ) cos sin cos
2 1nt
st D D nu t u e t t t
ξω ξ ω ω ω
ξ ξ
−
= + −
−
(2.73)
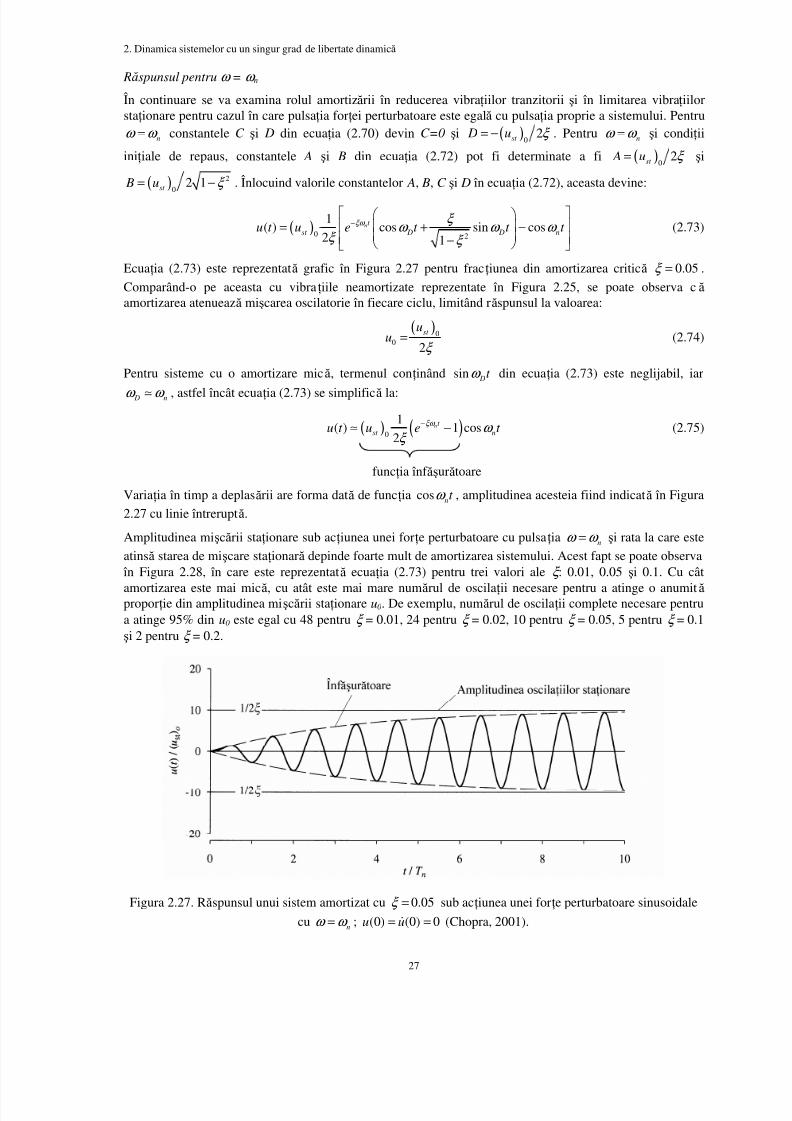
Ecuaia (2.73) este reprezentată grafic în Figura 2.27 pentru fraciunea din amortizarea critică 0.05ξ = .
Comparând-o pe aceasta cu vibraiile neamortizate reprezentate în Figura 2.25, se poate observa că amortizarea atenuează mişcarea oscilatorie în fiecare ciclu, limitând răspunsul la valoarea:
( )00 2
st u
uξ
= (2.74)
Pentru sisteme cu o amortizare mică, termenul coninând sin Dt ω din ecuaia (2.73) este neglijabil, iar
D nω ω , astfel încât ecuaia (2.73) se simplifică la:
( ) ( )0
1( ) 1 cos
2nt
st nu t u e t ξω ω
ξ −
− (2.75)
funcia înf ăşurătoare
Variaia în timp a deplasării are forma dată de funcia cosnt ω , amplitudinea acesteia fiind indicată în Figura
2.27 cu linie întreruptă.
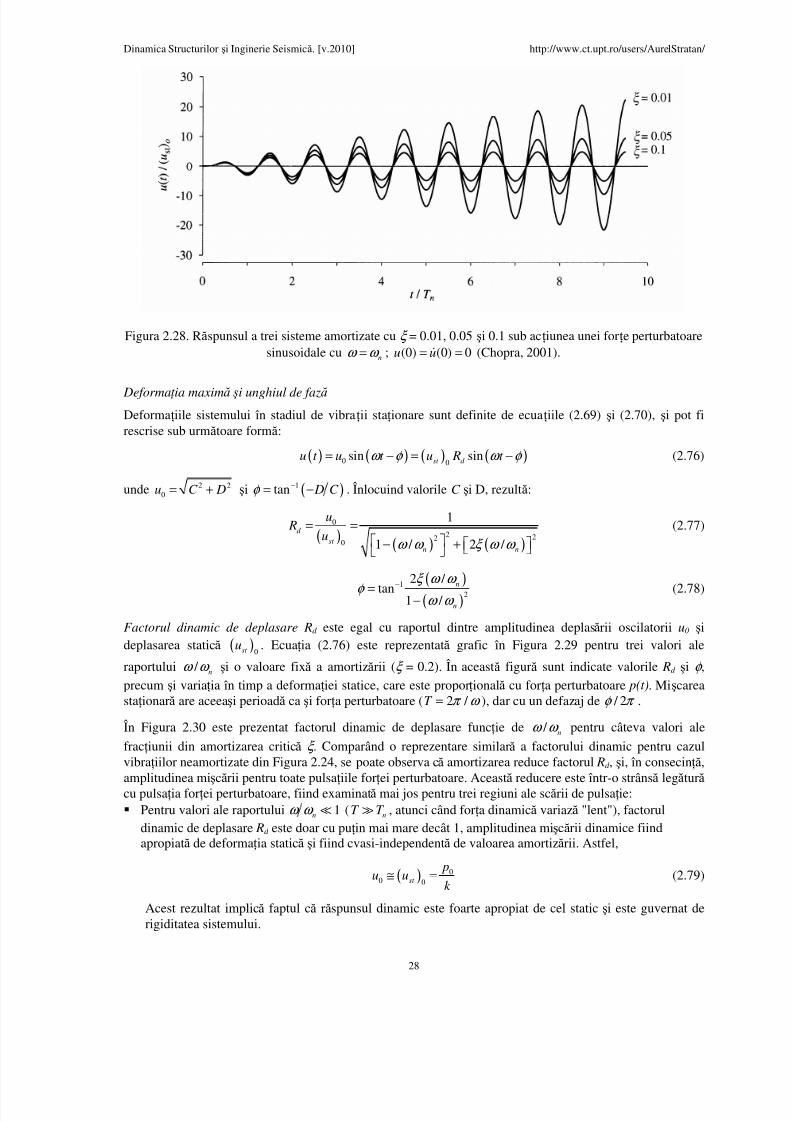
Amplitudinea mişcării staionare sub aciunea unei fore perturbatoare cu pulsaia nω ω = şi rata la care esteatinsă starea de mişcare staionară depinde foarte mult de amortizarea sistemului. Acest fapt se poate observa
în Figura 2.28, în care este reprezentată ecuaia (2.73) pentru trei valori ale ξ : 0.01, 0.05 şi 0.1. Cu câtamortizarea este mai mică, cu atât este mai mare numărul de oscilaii necesare pentru a atinge o anumită proporie din amplitudinea mişcării staionare u0. De exemplu, numărul de oscilaii complete necesare pentrua atinge 95% din u0 este egal cu 48 pentru ξ = 0.01, 24 pentru ξ = 0.02, 10 pentru ξ = 0.05, 5 pentru ξ = 0.1şi 2 pentru ξ = 0.2.
Figura 2.27. Răspunsul unui sistem amortizat cu 0.05ξ = sub aciunea unei fore perturbatoare sinusoidale
cun
ω ω = ; (0) (0) 0u u= = (Chopra, 2001).
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 29/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
28
Figura 2.28. Răspunsul a trei sisteme amortizate cu ξ = 0.01, 0.05 şi 0.1 sub aciunea unei fore perturbatoare
sinusoidale cu nω ω = ; (0) (0) 0u u= =
(Chopra, 2001).
Deforma ia maximă şi unghiul de fază
Deformaiile sistemului în stadiul de vibraii staionare sunt definite de ecuaiile (2.69) şi (2.70), şi pot firescrise sub următoare formă:
( ) ( ) ( ) ( )0 0sin sinst d u t u t u R t ω φ ω φ = − = − (2.76)
unde 2 20u C D= + şi ( )1tan D C φ −
= − . Înlocuind valorile C şi D, rezultă:
( ) ( ) ( )
0
2 220
1
1 / 2 / d
st n n
u R
u ω ω ξ ω ω
= =
− +
(2.77)
( )
( )
12
2 / tan
1 / n
n
ξ ω ω φ
ω ω
−
=
−
(2.78)
Factorul dinamic de deplasare Rd este egal cu raportul dintre amplitudinea deplasării oscilatorii u0 şideplasarea statică ( )
0st u . Ecuaia (2.76) este reprezentată grafic în Figura 2.29 pentru trei valori ale
raportului / nω ω şi o valoare fixă a amortizării (ξ = 0.2). În această figură sunt indicate valorile Rd şi φ ,
precum şi variaia în timp a deformaiei statice, care este proporională cu fora perturbatoare p(t). Mişcareastaionară are aceeaşi perioadă ca şi fora perturbatoare ( 2 / T π ω = ), dar cu un defazaj de / 2φ π .
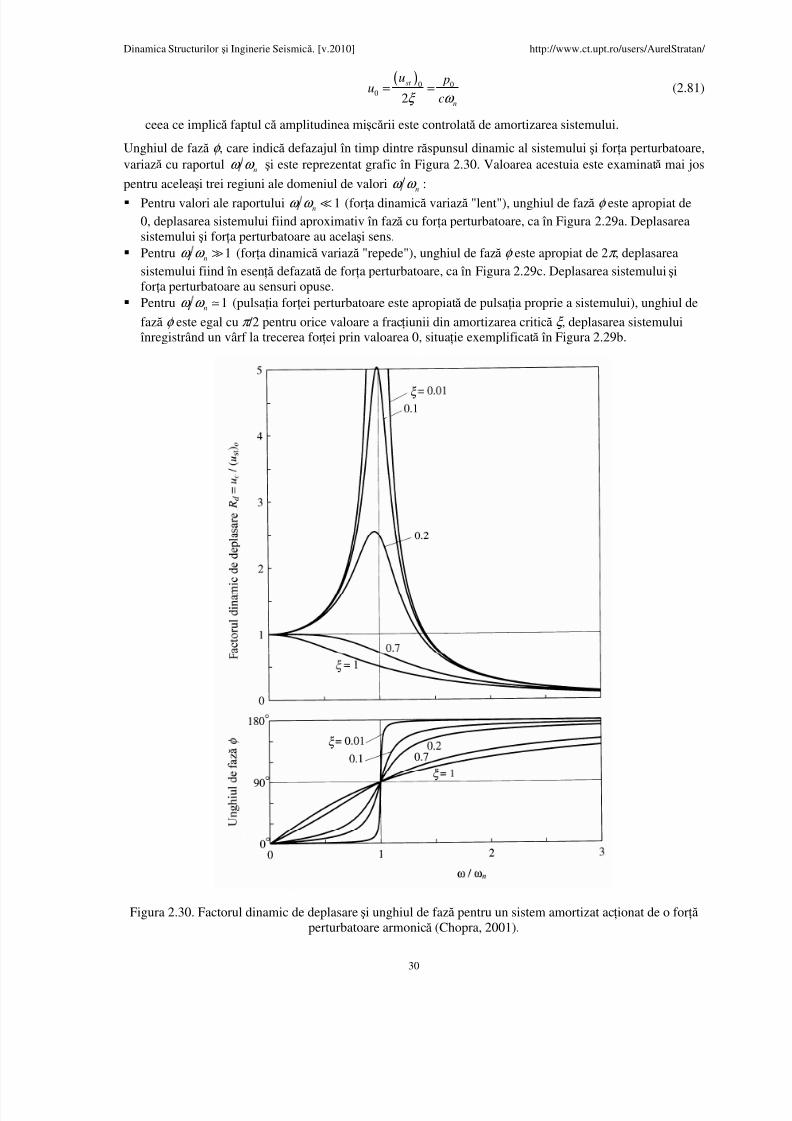
În Figura 2.30 este prezentat factorul dinamic de deplasare funcie de / nω ω pentru câteva valori ale
fraciunii din amortizarea critică ξ . Comparând o reprezentare similară a factorului dinamic pentru cazulvibraiilor neamortizate din Figura 2.24, se poate observa că amortizarea reduce factorul Rd , şi, în consecină,amplitudinea mişcării pentru toate pulsaiile forei perturbatoare. Această reducere este într-o strânsă legătură cu pulsaia forei perturbatoare, fiind examinată mai jos pentru trei regiuni ale scării de pulsaie: Pentru valori ale raportului 1nω ω ( nT T , atunci când fora dinamică variază "lent"), factorul
dinamic de deplasare Rd este doar cu puin mai mare decât 1, amplitudinea mişcării dinamice fiindapropiată de deformaia statică şi fiind cvasi-independentă de valoarea amortizării. Astfel,
( ) 00 0st
pu u
k
≅ = (2.79)
Acest rezultat implică faptul că răspunsul dinamic este foarte apropiat de cel static şi este guvernat derigiditatea sistemului.

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 30/149
2. Dinamica sistemelor cu un singur grad de libertate dinamică
29
Figura 2.29. Răspunsul staionar al unor sisteme amortizate (ξ = 0.2) sub aciunea unei fore perturbatoaresinusoidale cu pulsaia: / nω ω = 0.5 (a), / n
ω ω = 1 (b), / nω ω = 2 (c), Chopra, 2001.
Pentru 1nω ω ( n
T T , adică fora dinamică variază "repede"), factorul dinamic de deplasare Rd tinde
către zero odată cu creşterea raportului nω ω şi este puin afectat de valoarea amortizării. Pentru valori
ridicate ale raportului nω ω , termenul ( )n
ω ω domină ecuaia (2.77), care poate fi aproximată cu:
( )2
00 2 20
nst
pu u
m
ω
ω ω ≅ = (2.80)
ceea ce implică faptul că răspunsul este controlat de masa sistemului. Pentru 1n
ω ω (pulsaia forei perturbatoare este apropiată de pulsaia proprie de vibraie a sistemului),
factorul dinamic de deplasare Rd este sensibil la valoarea amortizării, şi pentru valori mici ale amortizăriipoate fi mult mai mare decât 1, ceea ce înseamnă că amplitudinea mişcării dinamice poate fi mult maimare decât deformaia statică. Pentru 1n
ω ω = ecuaia (2.77) devine:
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 31/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
30
( )0 00 2
st
n
u pu
cξ ω = = (2.81)
ceea ce implică faptul că amplitudinea mişcării este controlată de amortizarea sistemului.
Unghiul de fază φ , care indică defazajul în timp dintre răspunsul dinamic al sistemului şi fora perturbatoare,variază cu raportul n
ω ω şi este reprezentat grafic în Figura 2.30. Valoarea acestuia este examinată mai jos
pentru aceleaşi trei regiuni ale domeniul de valori nω ω : Pentru valori ale raportului 1n
ω ω (fora dinamică variază "lent"), unghiul de fază φ este apropiat de0, deplasarea sistemului fiind aproximativ în fază cu fora perturbatoare, ca în Figura 2.29a. Deplasareasistemului şi fora perturbatoare au acelaşi sens.
Pentru 1nω ω (fora dinamică variază "repede"), unghiul de fază φ este apropiat de 2π , deplasarea
sistemului fiind în esenă defazată de fora perturbatoare, ca în Figura 2.29c. Deplasarea sistemului şifora perturbatoare au sensuri opuse.
Pentru 1nω ω (pulsaia forei perturbatoare este apropiată de pulsaia proprie a sistemului), unghiul de
fază φ este egal cu π /2 pentru orice valoare a fraciunii din amortizarea critică ξ , deplasarea sistemului înregistrând un vârf la trecerea forei prin valoarea 0, situaie exemplificată în Figura 2.29b.
Figura 2.30. Factorul dinamic de deplasare şi unghiul de fază pentru un sistem amortizat acionat de o foră perturbatoare armonică (Chopra, 2001).

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 32/149
2. Dinamica sistemelor cu un singur grad de libertate dinamică
31
Răspunsul la rezonan ă
Frecven a rezonant ă este definită ca frecvena la care se înregistrează amplitudinea maximă a răspunsului întermeni de deplasare, viteză sau acceleraie. După cum se poate observa din Figura 2.30, valorile maxime aledeplasării se înregistrează la valori ale pulsaiei puin diferite de pulsaia proprie a sistemului. Frecvena (saupulsaia) de rezonană poate fi determinată derivând expresia Rd în raport cu n
ω ω şi egalând-o cu zero.
Pentru 1 2ξ < pulsaia rezonantă pentru deplasare este egală cu 21 2n
ω ξ − .
Pentru un sistem neamortizat pulsaia rezonantă este egală cu pulsaia proprie de vibraie a sistemului nω . De
notat faptul că pulsaia rezonantă pentru un sistem amortizat este diferită de pulsaia vibraiilor amortizate
Dω . Totuşi, pentru valori mici ale amortizării ( 20%ξ < ), diferenele între pulsaia rezonantă, cea proprie şicea amortizată sunt minore. Valoarea factorului dinamic de deplasare corespunzător pulsaiei rezonante este:
2
1
2 1d
Rξ ξ
=
−
(2.82)
2.3.4. Determinarea amortizării din încercări de vibra ii for ate amortizate
Determinarea pe cale analitică a coeficientului de amortizare vâscoasă c sau a fraciunii din amortizareacritică ξ nu este posibilă. Una dintre soluiile acestei probleme o constituie efectuarea de încercări de vibraiilibere şi interpretarea datelor obinute, folosind noiunea decrementului logaritmic, aşa cum s-a descris înseciunea 2.2.2. Această procedură este simplă şi relativ uşor de aplicat în condiii de laborator, pe modelesimple de structuri. Totuşi, aplicarea metodei decrementului logaritmic în cazul structurilor reale este dificilă dacă nu imposibilă, deoarece aplicarea unei deplasări iniiale sau a unei viteze iniiale structurilor realeimplică fore foarte mari şi structuri de reaciune de dimensiuni comparabile cu structurile încercate. Există
însă posibilitatea determinării fraciunii din amortizarea critică pe baza unor încercări de vibraii foratearmonice, care pot fi realizate mult mai uşor în cazul structurilor inginereşti. Vibraiile pot fi produse cuajutorul unor dispozitive rotative cu masă excentrică, fixate de structură. Prin modificarea masei excentricesau a vitezei de rotaie, se poate modifica foarte uşor amplitudinea, respectiv pulsaia forei armoniceperturbatoare. Efectuând încercări de vibraii forate la diferite valori ale pulsaiei forei armoniceperturbatoare şi înregistrând deplasarea de vârf a structurii, se pot obine curbe Rd -ω / ω n ca în Figura 2.31.
Figura 2.31. Definiia lăimii de bandă la semiputere (Chopra, 2001).
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 33/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
32
Forma curbei Rd -ω / ω n depinde de amortizarea sistemului. Una dintre modalităile de obinere a fraciunii dinamortizarea critică constă în folosirea principiului de lă ime de band ă la semiputere, definit ca şi diferenadintre valorile pulsaiilor de cele două pări ale pulsaiei rezonante ( )b a
ω ω − pentru care factorul dinamic de
deplasare este de 1 2 ori mai mic decât valoarea acestuia la rezonană. Acest concept este exemplificat înFigura 2.31.
Pentru valori mici ale lui ξ este adevărată următoarea relaie:
2b a
n
ω ω ξ
ω
−= (2.83)
relaie care poate fi reformulată ca şi:
2b a
n
ω ω ξ
ω
−= sau
2b a
n
f f
f ξ
−= (2.84)
unde 2 f ω π = este frecvena de vibraie. Acest rezultat permite evaluarea amortizării unei structuri pe bazaunor încercări de vibraii forate.
2.3.5. Amortizarea la structurile inginere şti
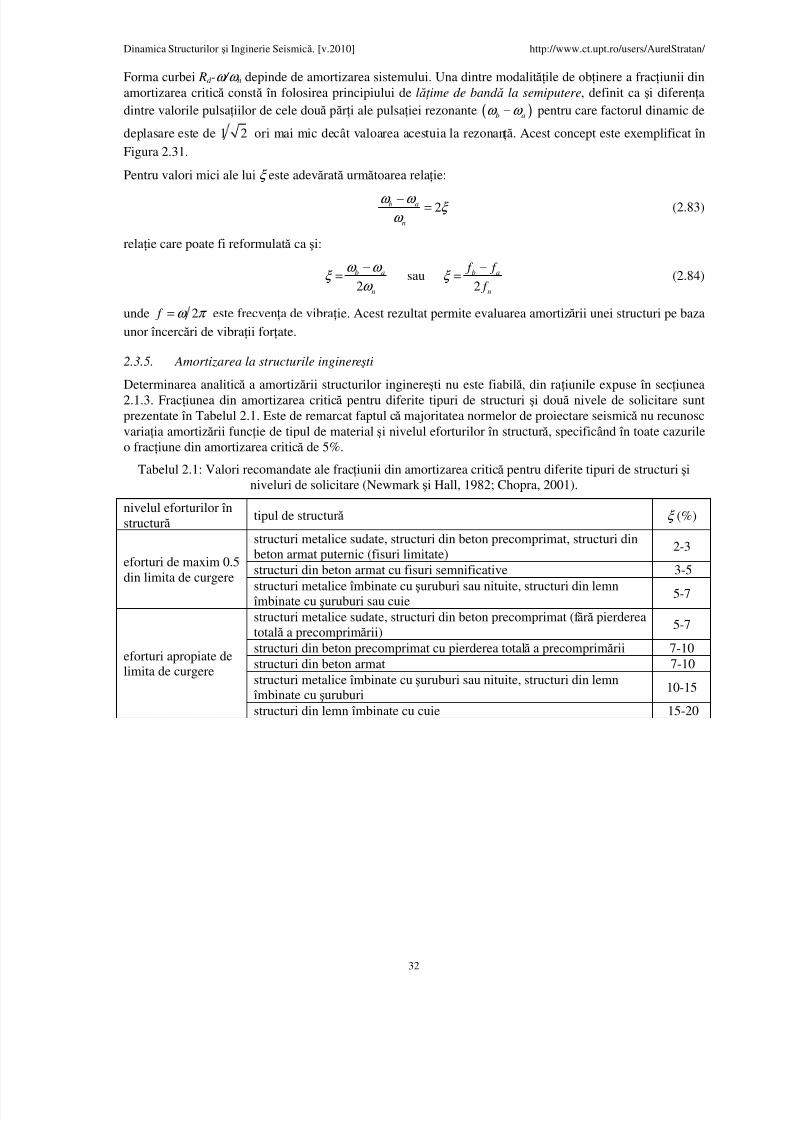
Determinarea analitică a amortizării structurilor inginereşti nu este fiabilă, din raiunile expuse în seciunea2.1.3. Fraciunea din amortizarea critică pentru diferite tipuri de structuri şi două nivele de solicitare suntprezentate în Tabelul 2.1. Este de remarcat faptul că majoritatea normelor de proiectare seismică nu recunoscvariaia amortizării funcie de tipul de material şi nivelul eforturilor în structură, specificând în toate cazurileo fraciune din amortizarea critică de 5%.
Tabelul 2.1: Valori recomandate ale fraciunii din amortizarea critică pentru diferite tipuri de structuri şiniveluri de solicitare (Newmark şi Hall, 1982; Chopra, 2001).
nivelul eforturilor înstructură
tipul de structură ξ (%)
structuri metalice sudate, structuri din beton precomprimat, structuri dinbeton armat puternic (fisuri limitate)
2-3
structuri din beton armat cu fisuri semnificative 3-5eforturi de maxim 0.5din limita de curgere
structuri metalice îmbinate cu şuruburi sau nituite, structuri din lemn îmbinate cu şuruburi sau cuie
5-7
structuri metalice sudate, structuri din beton precomprimat (f ără pierdereatotală a precomprimării)
5-7
structuri din beton precomprimat cu pierderea totală a precomprimării 7-10structuri din beton armat 7-10structuri metalice îmbinate cu şuruburi sau nituite, structuri din lemn
îmbinate cu şuruburi10-15
eforturi apropiate delimita de curgere
structuri din lemn îmbinate cu cuie 15-20
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 34/149
3. Noiuni de seismologie inginerească
33
3. Noiuni de seismologie inginerească
3.1. Introducere
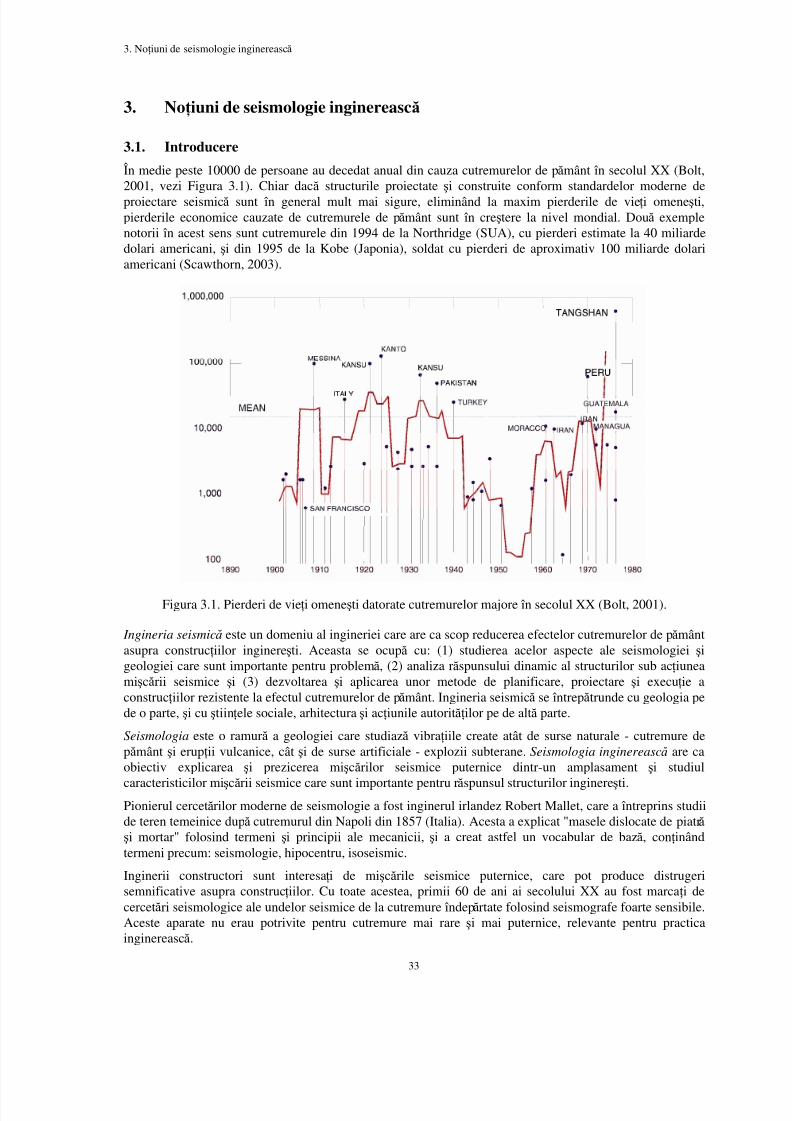
În medie peste 10000 de persoane au decedat anual din cauza cutremurelor de pământ în secolul XX (Bolt,2001, vezi Figura 3.1). Chiar dacă structurile proiectate şi construite conform standardelor moderne deproiectare seismică sunt în general mult mai sigure, eliminând la maxim pierderile de viei omeneşti,pierderile economice cauzate de cutremurele de pământ sunt în creştere la nivel mondial. Două exemplenotorii în acest sens sunt cutremurele din 1994 de la Northridge (SUA), cu pierderi estimate la 40 miliardedolari americani, şi din 1995 de la Kobe (Japonia), soldat cu pierderi de aproximativ 100 miliarde dolariamericani (Scawthorn, 2003).
Figura 3.1. Pierderi de viei omeneşti datorate cutremurelor majore în secolul XX (Bolt, 2001).
Ingineria seismică este un domeniu al ingineriei care are ca scop reducerea efectelor cutremurelor de pământasupra construciilor inginereşti. Aceasta se ocupă cu: (1) studierea acelor aspecte ale seismologiei şigeologiei care sunt importante pentru problemă, (2) analiza răspunsului dinamic al structurilor sub aciuneamişcării seismice şi (3) dezvoltarea şi aplicarea unor metode de planificare, proiectare şi execuie aconstruciilor rezistente la efectul cutremurelor de pământ. Ingineria seismică se întrepătrunde cu geologia pe
de o parte, şi cu ştiinele sociale, arhitectura şi aciunile autorităilor pe de altă parte.Seismologia este o ramură a geologiei care studiază vibraiile create atât de surse naturale - cutremure depământ şi erupii vulcanice, cât şi de surse artificiale - explozii subterane. Seismologia inginerească are caobiectiv explicarea şi prezicerea mişcărilor seismice puternice dintr-un amplasament şi studiulcaracteristicilor mişcării seismice care sunt importante pentru răspunsul structurilor inginereşti.
Pionierul cercetărilor moderne de seismologie a fost inginerul irlandez Robert Mallet, care a întreprins studiide teren temeinice după cutremurul din Napoli din 1857 (Italia). Acesta a explicat "masele dislocate de piatră şi mortar" folosind termeni şi principii ale mecanicii, şi a creat astfel un vocabular de bază, coninândtermeni precum: seismologie, hipocentru, isoseismic.
Inginerii constructori sunt interesai de mişcările seismice puternice, care pot produce distrugeri
semnificative asupra construciilor. Cu toate acestea, primii 60 de ani ai secolului XX au fost marca i decercetări seismologice ale undelor seismice de la cutremure îndepărtate folosind seismografe foarte sensibile.Aceste aparate nu erau potrivite pentru cutremure mai rare şi mai puternice, relevante pentru practicainginerească.
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 35/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
34
Ulterior, situaia s-a schimbat. După cutremurul San Fernando din 1971 au fost obinute sute de înregistrăriseismice puternice pentru acest seism de magnitudine 6.5 din SUA. Cercetările privind mişcările seismiceputernice au început să avanseze rapid odată cu instalarea în zonele seismice de pe glob a unor reele extinsede accelerometre digitale şi obinerea de înregistrări seismice în urma unor cutremure majore.
3.2. Activitatea seismică la nivel mondial
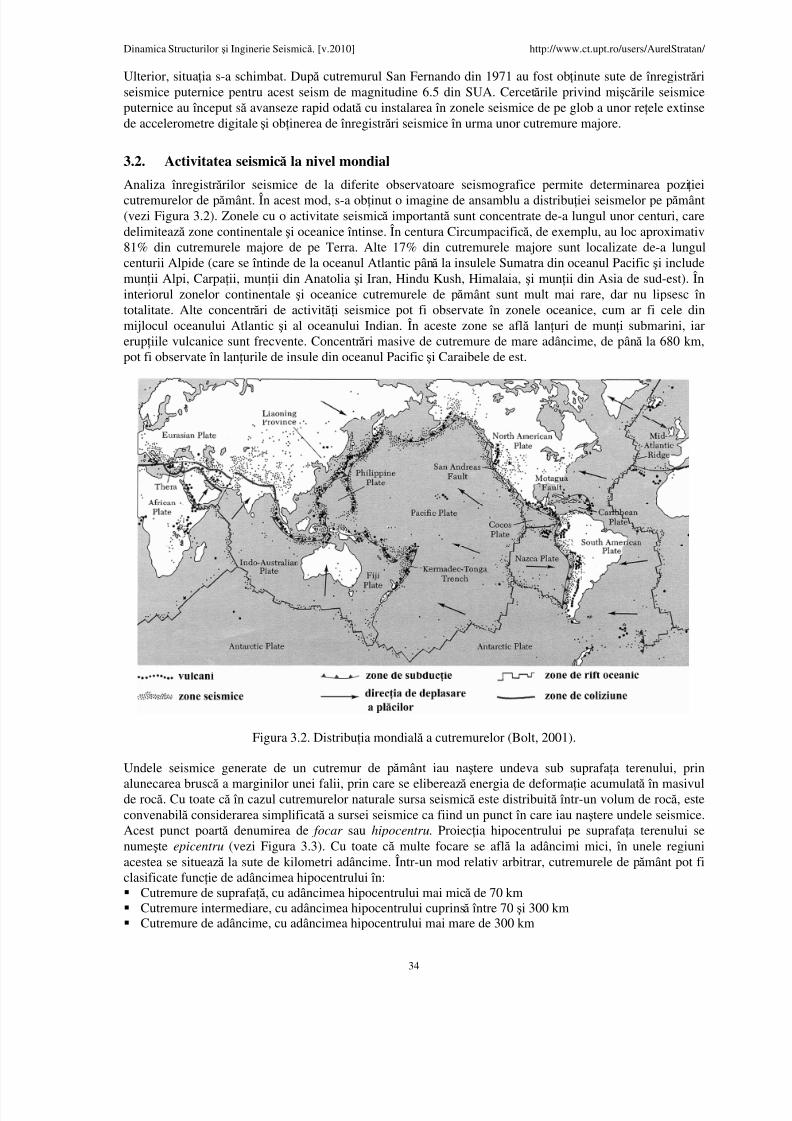
Analiza înregistrărilor seismice de la diferite observatoare seismografice permite determinarea poziieicutremurelor de pământ. În acest mod, s-a obinut o imagine de ansamblu a distribuiei seismelor pe pământ(vezi Figura 3.2). Zonele cu o activitate seismică importantă sunt concentrate de-a lungul unor centuri, caredelimitează zone continentale şi oceanice întinse. În centura Circumpacifică, de exemplu, au loc aproximativ81% din cutremurele majore de pe Terra. Alte 17% din cutremurele majore sunt localizate de-a lungulcenturii Alpide (care se întinde de la oceanul Atlantic până la insulele Sumatra din oceanul Pacific şi includemunii Alpi, Carpaii, munii din Anatolia şi Iran, Hindu Kush, Himalaia, şi munii din Asia de sud-est). Îninteriorul zonelor continentale şi oceanice cutremurele de pământ sunt mult mai rare, dar nu lipsesc întotalitate. Alte concentrări de activităi seismice pot fi observate în zonele oceanice, cum ar fi cele dinmijlocul oceanului Atlantic şi al oceanului Indian. În aceste zone se află lanuri de muni submarini, iarerupiile vulcanice sunt frecvente. Concentrări masive de cutremure de mare adâncime, de până la 680 km,
pot fi observate în lanurile de insule din oceanul Pacific şi Caraibele de est.
Figura 3.2. Distribuia mondială a cutremurelor (Bolt, 2001).
Undele seismice generate de un cutremur de pământ iau naştere undeva sub suprafaa terenului, prinalunecarea bruscă a marginilor unei falii, prin care se eliberează energia de deformaie acumulată în masivulde rocă. Cu toate că în cazul cutremurelor naturale sursa seismică este distribuită într-un volum de rocă, esteconvenabilă considerarea simplificată a sursei seismice ca fiind un punct în care iau naştere undele seismice.Acest punct poartă denumirea de focar sau hipocentru. Proiecia hipocentrului pe suprafaa terenului senumeşte epicentru (vezi Figura 3.3). Cu toate că multe focare se află la adâncimi mici, în unele regiuniacestea se situează la sute de kilometri adâncime. Într-un mod relativ arbitrar, cutremurele de pământ pot ficlasificate funcie de adâncimea hipocentrului în: Cutremure de suprafaă, cu adâncimea hipocentrului mai mică de 70 km Cutremure intermediare, cu adâncimea hipocentrului cuprinsă între 70 şi 300 km Cutremure de adâncime, cu adâncimea hipocentrului mai mare de 300 km
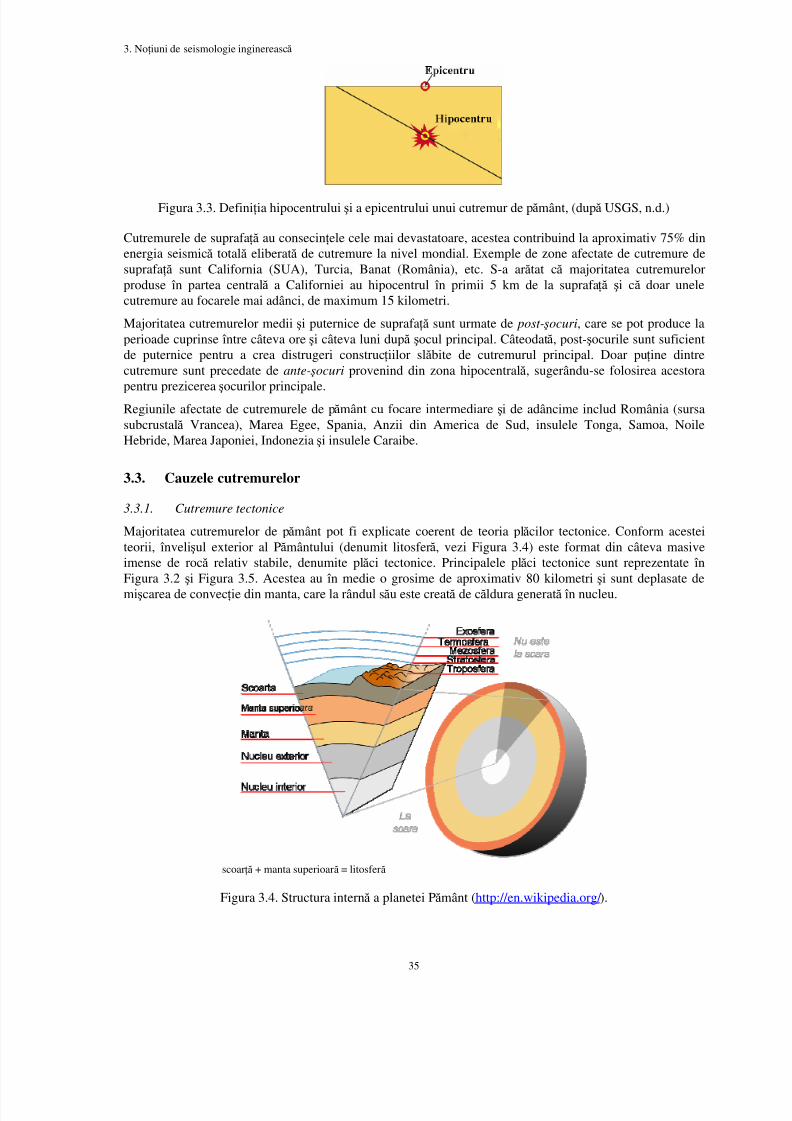
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 36/149
3. Noiuni de seismologie inginerească
35
Figura 3.3. Definiia hipocentrului şi a epicentrului unui cutremur de pământ, (după USGS, n.d.)
Cutremurele de suprafaă au consecinele cele mai devastatoare, acestea contribuind la aproximativ 75% dinenergia seismică totală eliberată de cutremure la nivel mondial. Exemple de zone afectate de cutremure desuprafaă sunt California (SUA), Turcia, Banat (România), etc. S-a arătat că majoritatea cutremurelorproduse în partea centrală a Californiei au hipocentrul în primii 5 km de la suprafaă şi că doar unelecutremure au focarele mai adânci, de maximum 15 kilometri.
Majoritatea cutremurelor medii şi puternice de suprafaă sunt urmate de post- şocuri, care se pot produce laperioade cuprinse între câteva ore şi câteva luni după şocul principal. Câteodată, post-şocurile sunt suficient
de puternice pentru a crea distrugeri construciilor slăbite de cutremurul principal. Doar puine dintrecutremure sunt precedate de ante- şocuri provenind din zona hipocentrală, sugerându-se folosirea acestorapentru prezicerea şocurilor principale.
Regiunile afectate de cutremurele de pământ cu focare intermediare şi de adâncime includ România (sursasubcrustală Vrancea), Marea Egee, Spania, Anzii din America de Sud, insulele Tonga, Samoa, NoileHebride, Marea Japoniei, Indonezia şi insulele Caraibe.
3.3. Cauzele cutremurelor
3.3.1. Cutremure tectonice
Majoritatea cutremurelor de pământ pot fi explicate coerent de teoria plăcilor tectonice. Conform acesteiteorii, învelişul exterior al Pământului (denumit litosferă, vezi Figura 3.4) este format din câteva masiveimense de rocă relativ stabile, denumite plăci tectonice. Principalele plăci tectonice sunt reprezentate înFigura 3.2 şi Figura 3.5. Acestea au în medie o grosime de aproximativ 80 kilometri şi sunt deplasate demişcarea de convecie din manta, care la rândul său este creată de căldura generată în nucleu.
scoară + manta superioară = litosferă
Figura 3.4. Structura internă a planetei Pământ (http://en.wikipedia.org/
).
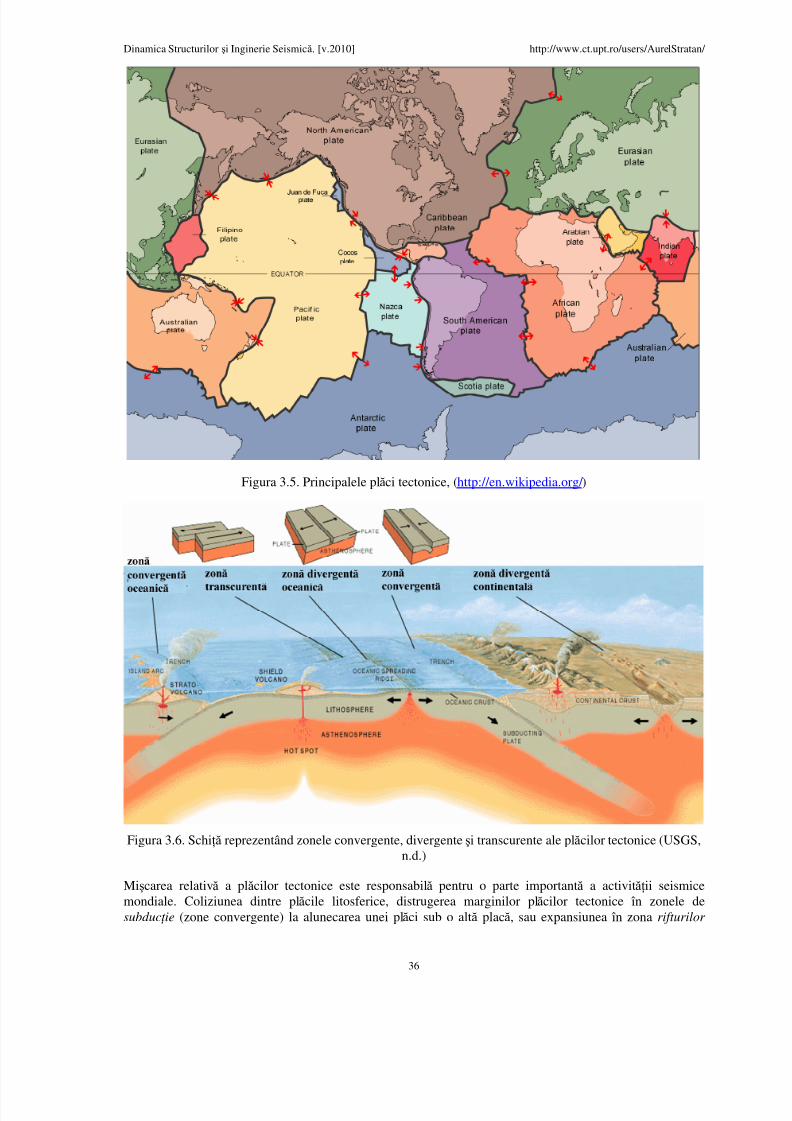
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 37/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
36
Figura 3.5. Principalele plăci tectonice, (http://en.wikipedia.org/
)
Figura 3.6. Schiă reprezentând zonele convergente, divergente şi transcurente ale plăcilor tectonice (USGS,n.d.)
Mişcarea relativă a plăcilor tectonice este responsabilă pentru o parte importantă a activităii seismicemondiale. Coliziunea dintre plăcile litosferice, distrugerea marginilor plăcilor tectonice în zonele desubduc ie (zone convergente) la alunecarea unei plăci sub o altă placă, sau expansiunea în zona rifturilor
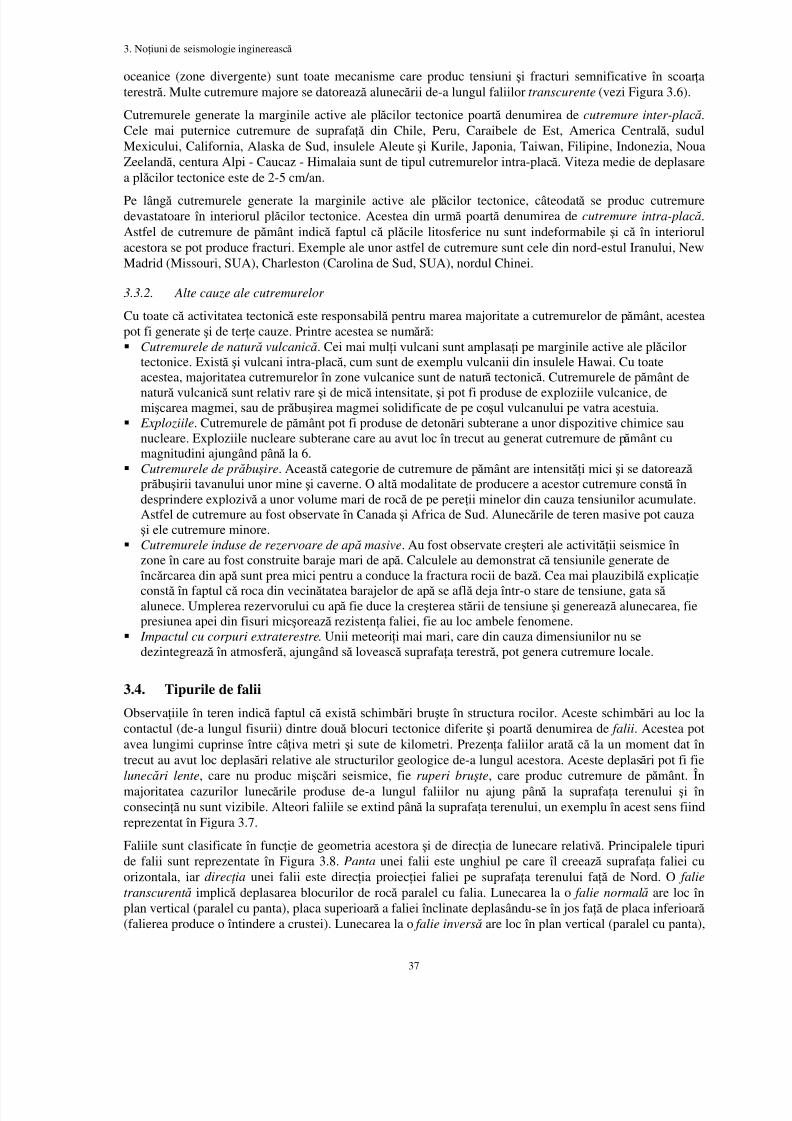
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 38/149
3. Noiuni de seismologie inginerească
37
oceanice (zone divergente) sunt toate mecanisme care produc tensiuni şi fracturi semnificative în scoaraterestră. Multe cutremure majore se datorează alunecării de-a lungul faliilor transcurente (vezi Figura 3.6).
Cutremurele generate la marginile active ale plăcilor tectonice poartă denumirea de cutremure inter-placă.Cele mai puternice cutremure de suprafaă din Chile, Peru, Caraibele de Est, America Centrală, sudulMexicului, California, Alaska de Sud, insulele Aleute şi Kurile, Japonia, Taiwan, Filipine, Indonezia, NouaZeelandă, centura Alpi - Caucaz - Himalaia sunt de tipul cutremurelor intra-placă. Viteza medie de deplasare
a plăcilor tectonice este de 2-5 cm/an.Pe lângă cutremurele generate la marginile active ale plăcilor tectonice, câteodată se produc cutremuredevastatoare în interiorul plăcilor tectonice. Acestea din urmă poartă denumirea de cutremure intra-placă.Astfel de cutremure de pământ indică faptul că plăcile litosferice nu sunt indeformabile şi că în interiorulacestora se pot produce fracturi. Exemple ale unor astfel de cutremure sunt cele din nord-estul Iranului, NewMadrid (Missouri, SUA), Charleston (Carolina de Sud, SUA), nordul Chinei.
3.3.2. Alte cauze ale cutremurelor
Cu toate că activitatea tectonică este responsabilă pentru marea majoritate a cutremurelor de pământ, acesteapot fi generate şi de tere cauze. Printre acestea se numără: Cutremurele de natur ă vulcanică. Cei mai muli vulcani sunt amplasai pe marginile active ale plăcilor
tectonice. Există şi vulcani intra-placă, cum sunt de exemplu vulcanii din insulele Hawai. Cu toateacestea, majoritatea cutremurelor în zone vulcanice sunt de natură tectonică. Cutremurele de pământ denatură vulcanică sunt relativ rare şi de mică intensitate, şi pot fi produse de exploziile vulcanice, demişcarea magmei, sau de prăbuşirea magmei solidificate de pe coşul vulcanului pe vatra acestuia.
Exploziile. Cutremurele de pământ pot fi produse de detonări subterane a unor dispozitive chimice saunucleare. Exploziile nucleare subterane care au avut loc în trecut au generat cutremure de pământ cumagnitudini ajungând până la 6.
Cutremurele de pr ăbu şire. Această categorie de cutremure de pământ are intensităi mici şi se datorează prăbuşirii tavanului unor mine şi caverne. O altă modalitate de producere a acestor cutremure constă îndesprindere explozivă a unor volume mari de rocă de pe pereii minelor din cauza tensiunilor acumulate.Astfel de cutremure au fost observate în Canada şi Africa de Sud. Alunecările de teren masive pot cauza
şi ele cutremure minore. Cutremurele induse de rezervoare de apă masive. Au fost observate creşteri ale activităii seismice înzone în care au fost construite baraje mari de apă. Calculele au demonstrat că tensiunile generate de
încărcarea din apă sunt prea mici pentru a conduce la fractura rocii de bază. Cea mai plauzibilă explicaieconstă în faptul că roca din vecinătatea barajelor de apă se află deja într-o stare de tensiune, gata să alunece. Umplerea rezervorului cu apă fie duce la creşterea stării de tensiune şi generează alunecarea, fiepresiunea apei din fisuri micşorează rezistena faliei, fie au loc ambele fenomene.
Impactul cu corpuri extraterestre. Unii meteorii mai mari, care din cauza dimensiunilor nu sedezintegrează în atmosferă, ajungând să lovească suprafaa terestră, pot genera cutremure locale.
3.4. Tipurile de falii
Observaiile în teren indică faptul că există schimbări bruşte în structura rocilor. Aceste schimbări au loc lacontactul (de-a lungul fisurii) dintre două blocuri tectonice diferite şi poartă denumirea de falii. Acestea potavea lungimi cuprinse între câiva metri şi sute de kilometri. Prezena faliilor arată că la un moment dat întrecut au avut loc deplasări relative ale structurilor geologice de-a lungul acestora. Aceste deplasări pot fi fielunecări lente, care nu produc mişcări seismice, fie ruperi bru şte, care produc cutremure de pământ. Înmajoritatea cazurilor lunecările produse de-a lungul faliilor nu ajung până la suprafaa terenului şi înconsecină nu sunt vizibile. Alteori faliile se extind până la suprafaa terenului, un exemplu în acest sens fiindreprezentat în Figura 3.7.
Faliile sunt clasificate în funcie de geometria acestora şi de direcia de lunecare relativă. Principalele tipuride falii sunt reprezentate în Figura 3.8. Panta unei falii este unghiul pe care îl creează suprafaa faliei cuorizontala, iar direc ia unei falii este direcia proieciei faliei pe suprafaa terenului faă de Nord. O falie
transcurent ă implică deplasarea blocurilor de rocă paralel cu falia. Lunecarea la o falie normală are loc înplan vertical (paralel cu panta), placa superioară a faliei înclinate deplasându-se în jos faă de placa inferioară (falierea produce o întindere a crustei). Lunecarea la o falie inversă are loc în plan vertical (paralel cu panta),
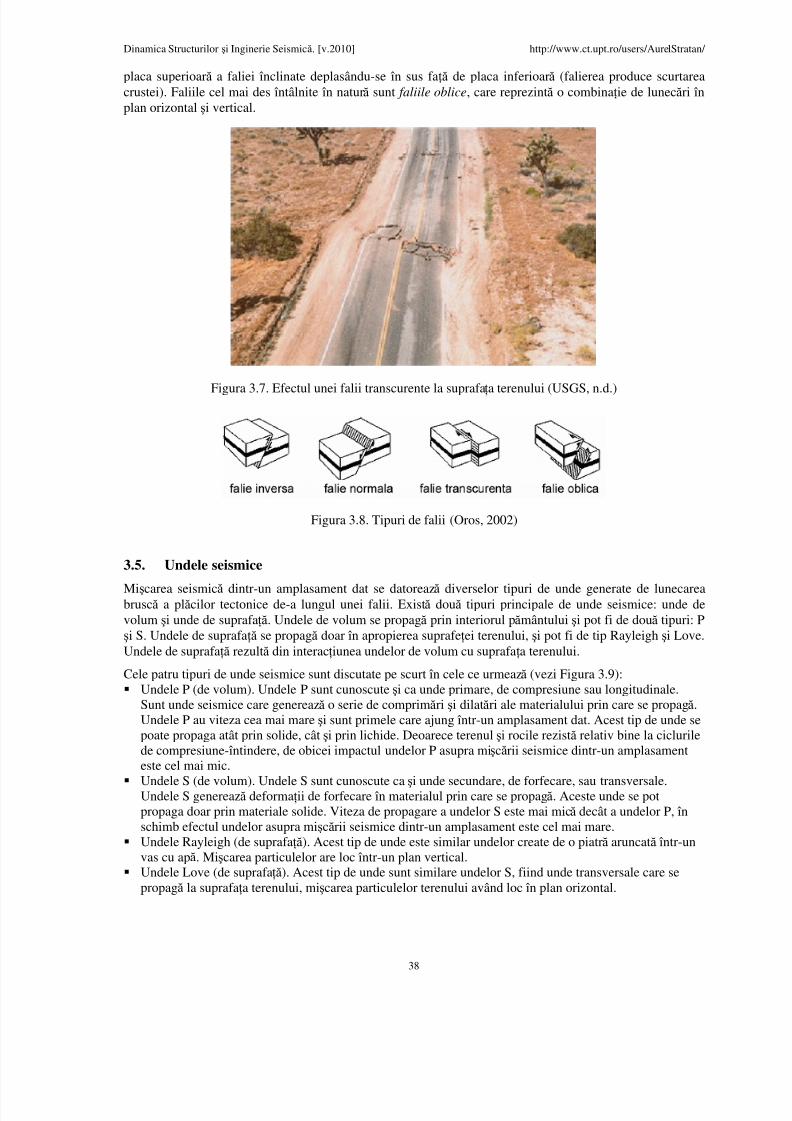
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 39/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
38
placa superioară a faliei înclinate deplasându-se în sus faă de placa inferioară (falierea produce scurtareacrustei). Faliile cel mai des întâlnite în natură sunt faliile oblice, care reprezintă o combinaie de lunecări înplan orizontal şi vertical.
Figura 3.7. Efectul unei falii transcurente la suprafaa terenului (USGS, n.d.)
Figura 3.8. Tipuri de falii (Oros, 2002)
3.5. Undele seismice
Mişcarea seismică dintr-un amplasament dat se datorează diverselor tipuri de unde generate de lunecareabruscă a plăcilor tectonice de-a lungul unei falii. Există două tipuri principale de unde seismice: unde devolum şi unde de suprafaă. Undele de volum se propagă prin interiorul pământului şi pot fi de două tipuri: Pşi S. Undele de suprafaă se propagă doar în apropierea suprafeei terenului, şi pot fi de tip Rayleigh şi Love.Undele de suprafaă rezultă din interaciunea undelor de volum cu suprafaa terenului.
Cele patru tipuri de unde seismice sunt discutate pe scurt în cele ce urmează (vezi Figura 3.9): Undele P (de volum). Undele P sunt cunoscute şi ca unde primare, de compresiune sau longitudinale.
Sunt unde seismice care generează o serie de comprimări şi dilatări ale materialului prin care se propagă.Undele P au viteza cea mai mare şi sunt primele care ajung într-un amplasament dat. Acest tip de unde sepoate propaga atât prin solide, cât şi prin lichide. Deoarece terenul şi rocile rezistă relativ bine la ciclurilede compresiune-întindere, de obicei impactul undelor P asupra mişcării seismice dintr-un amplasamenteste cel mai mic.
Undele S (de volum). Undele S sunt cunoscute ca şi unde secundare, de forfecare, sau transversale.Undele S generează deformaii de forfecare în materialul prin care se propagă. Aceste unde se potpropaga doar prin materiale solide. Viteza de propagare a undelor S este mai mică decât a undelor P, înschimb efectul undelor asupra mişcării seismice dintr-un amplasament este cel mai mare.
Undele Rayleigh (de suprafaă). Acest tip de unde este similar undelor create de o piatră aruncată într-unvas cu apă. Mişcarea particulelor are loc într-un plan vertical.
Undele Love (de suprafaă). Acest tip de unde sunt similare undelor S, fiind unde transversale care se
propagă la suprafaa terenului, mişcarea particulelor terenului având loc în plan orizontal.
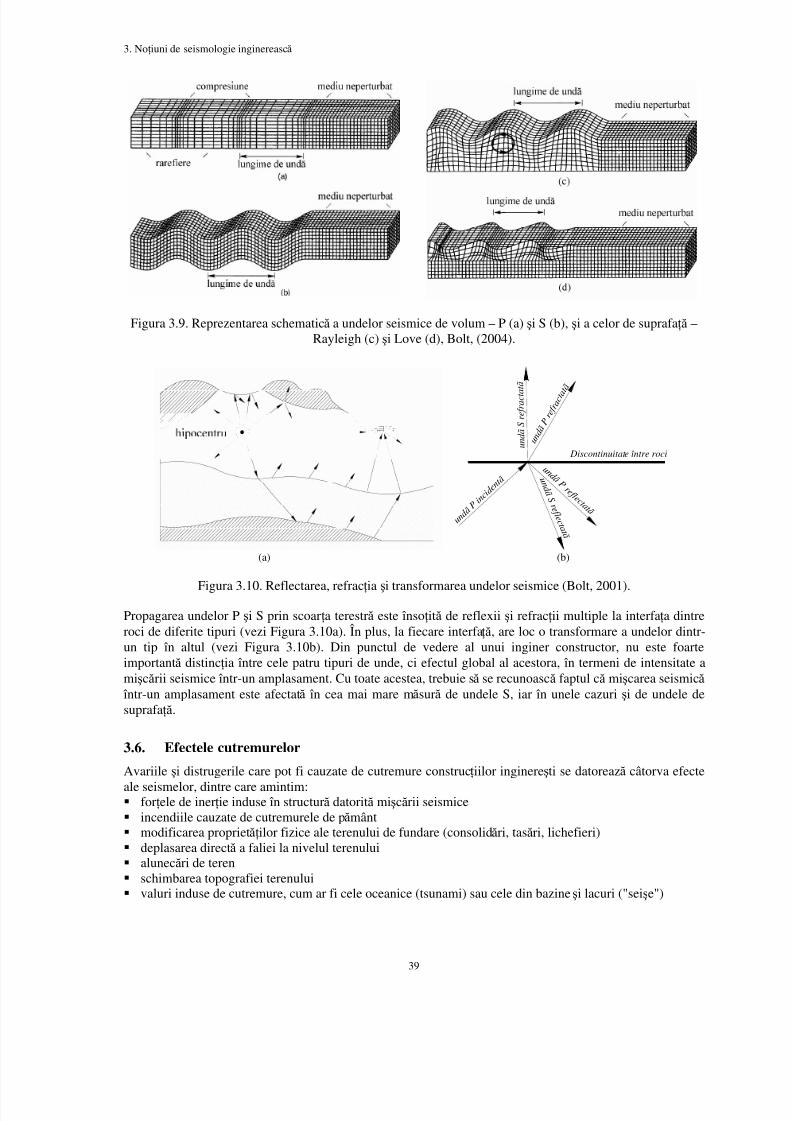
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 40/149
3. Noiuni de seismologie inginerească
39
Figura 3.9. Reprezentarea schematică a undelor seismice de volum – P (a) şi S (b), şi a celor de suprafaă –Rayleigh (c) şi Love (d), Bolt, (2004).
Discontinuitate între roci
u n d ã
P i n c i d e
n t ã u
n d ã S r e f
l e c t a
t ã
u n d ã P
r e f l e c t a t ã
u n d ã
P r e f r a
c t a t ã
u n d ã S r
e f r a c t a t ã
(a) (b)
Figura 3.10. Reflectarea, refracia şi transformarea undelor seismice (Bolt, 2001).
Propagarea undelor P şi S prin scoara terestră este însoită de reflexii şi refracii multiple la interfaa dintreroci de diferite tipuri (vezi Figura 3.10a). În plus, la fiecare interfaă, are loc o transformare a undelor dintr-un tip în altul (vezi Figura 3.10b). Din punctul de vedere al unui inginer constructor, nu este foarteimportantă distincia între cele patru tipuri de unde, ci efectul global al acestora, în termeni de intensitate amişcării seismice într-un amplasament. Cu toate acestea, trebuie să se recunoască faptul că mişcarea seismică
într-un amplasament este afectată în cea mai mare măsură de undele S, iar în unele cazuri şi de undele de
suprafaă.
3.6. Efectele cutremurelor
Avariile şi distrugerile care pot fi cauzate de cutremure construciilor inginereşti se datorează câtorva efecteale seismelor, dintre care amintim: forele de inerie induse în structură datorită mişcării seismice incendiile cauzate de cutremurele de pământ modificarea proprietăilor fizice ale terenului de fundare (consolidări, tasări, lichefieri) deplasarea directă a faliei la nivelul terenului alunecări de teren schimbarea topografiei terenului valuri induse de cutremure, cum ar fi cele oceanice (tsunami) sau cele din bazine şi lacuri ("seişe")
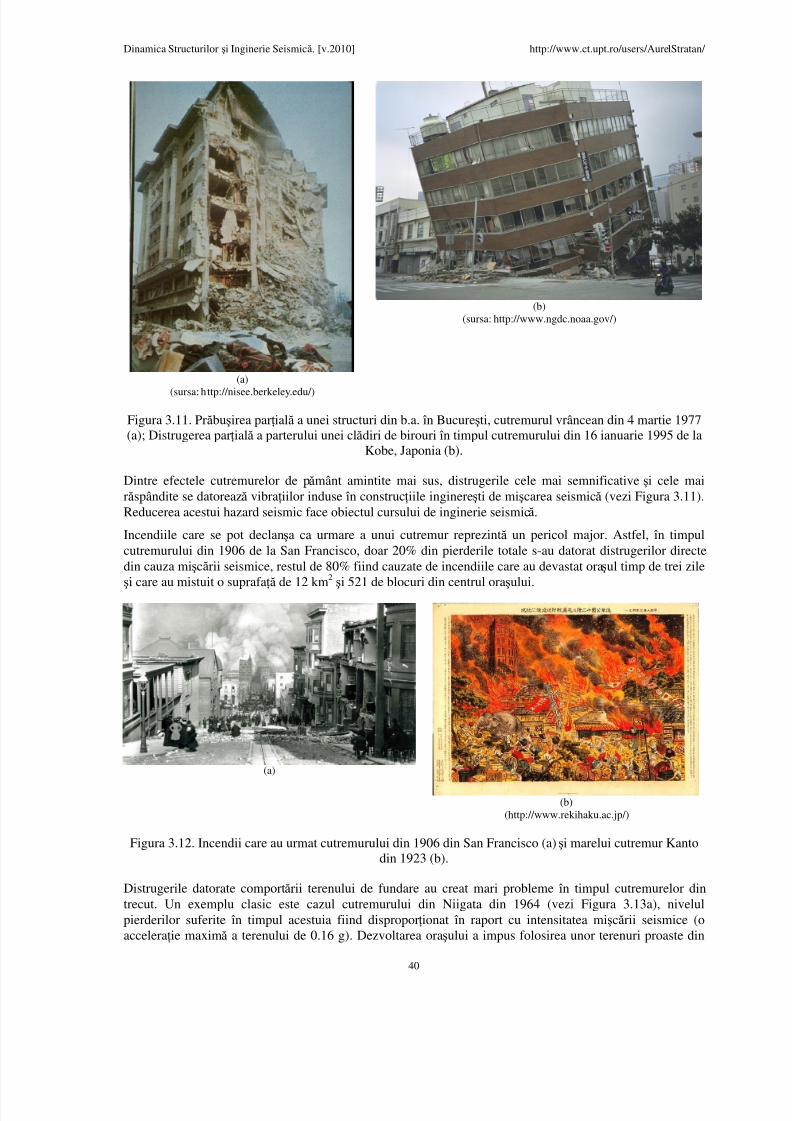
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 41/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
40
(a)(sursa: http://nisee.berkeley.edu/)
(b)(sursa: http://www.ngdc.noaa.gov/)
Figura 3.11. Prăbuşirea parială a unei structuri din b.a. în Bucureşti, cutremurul vrâncean din 4 martie 1977(a); Distrugerea parială a parterului unei clădiri de birouri în timpul cutremurului din 16 ianuarie 1995 de la
Kobe, Japonia (b).
Dintre efectele cutremurelor de pământ amintite mai sus, distrugerile cele mai semnificative şi cele mairăspândite se datorează vibraiilor induse în construciile inginereşti de mişcarea seismică (vezi Figura 3.11).Reducerea acestui hazard seismic face obiectul cursului de inginerie seismică.
Incendiile care se pot declanşa ca urmare a unui cutremur reprezintă un pericol major. Astfel, în timpulcutremurului din 1906 de la San Francisco, doar 20% din pierderile totale s-au datorat distrugerilor directedin cauza mişcării seismice, restul de 80% fiind cauzate de incendiile care au devastat oraşul timp de trei zileşi care au mistuit o suprafaă de 12 km2 şi 521 de blocuri din centrul oraşului.
(a)
(b)(http://www.rekihaku.ac.jp/)
Figura 3.12. Incendii care au urmat cutremurului din 1906 din San Francisco (a) şi marelui cutremur Kantodin 1923 (b).
Distrugerile datorate comportării terenului de fundare au creat mari probleme în timpul cutremurelor dintrecut. Un exemplu clasic este cazul cutremurului din Niigata din 1964 (vezi Figura 3.13a), nivelulpierderilor suferite în timpul acestuia fiind disproporionat în raport cu intensitatea mişcării seismice (oacceleraie maximă a terenului de 0.16 g). Dezvoltarea oraşului a impus folosirea unor terenuri proaste din
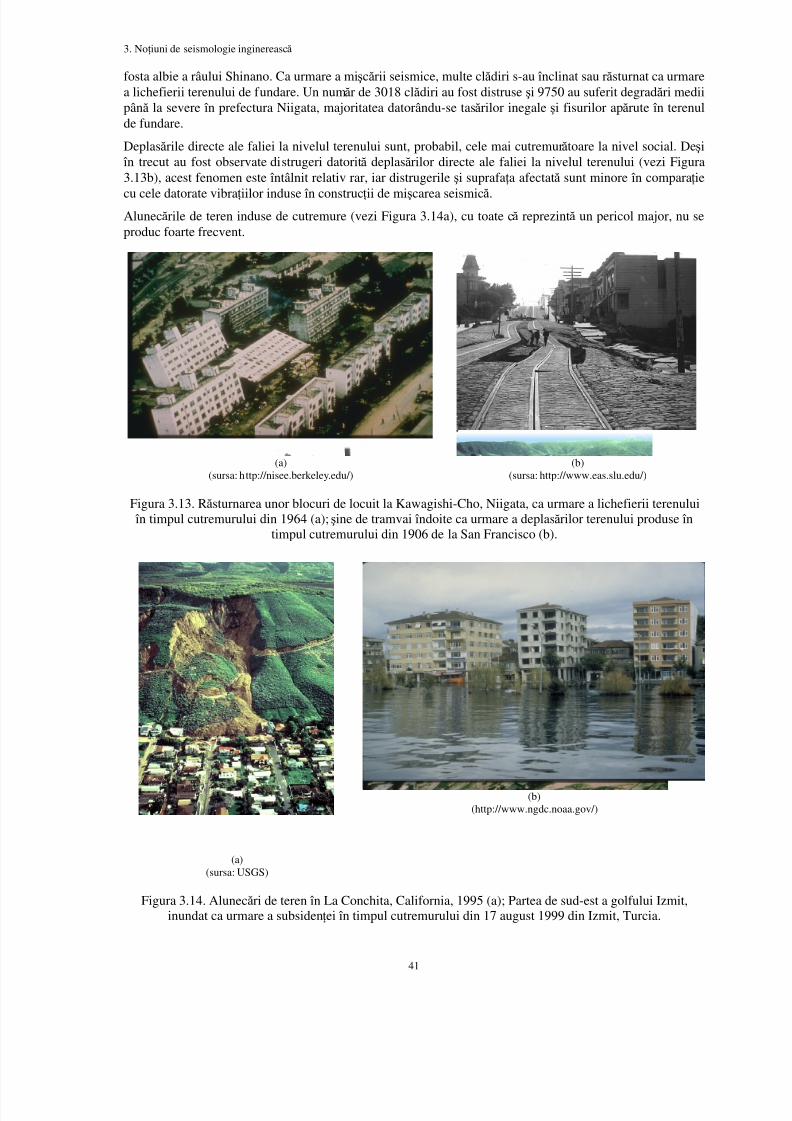
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 42/149
3. Noiuni de seismologie inginerească
41
fosta albie a râului Shinano. Ca urmare a mişcării seismice, multe clădiri s-au înclinat sau răsturnat ca urmarea lichefierii terenului de fundare. Un număr de 3018 clădiri au fost distruse şi 9750 au suferit degradări mediipână la severe în prefectura Niigata, majoritatea datorându-se tasărilor inegale şi fisurilor apărute în terenulde fundare.
Deplasările directe ale faliei la nivelul terenului sunt, probabil, cele mai cutremurătoare la nivel social. Deşi în trecut au fost observate distrugeri datorită deplasărilor directe ale faliei la nivelul terenului (vezi Figura
3.13b), acest fenomen este întâlnit relativ rar, iar distrugerile şi suprafaa afectată sunt minore în comparaiecu cele datorate vibraiilor induse în construcii de mişcarea seismică.
Alunecările de teren induse de cutremure (vezi Figura 3.14a), cu toate că reprezintă un pericol major, nu seproduc foarte frecvent.
(a)(sursa: http://nisee.berkeley.edu/)
(b)(sursa: http://www.eas.slu.edu/)
Figura 3.13. Răsturnarea unor blocuri de locuit la Kawagishi-Cho, Niigata, ca urmare a lichefierii terenului în timpul cutremurului din 1964 (a); şine de tramvai îndoite ca urmare a deplasărilor terenului produse în
timpul cutremurului din 1906 de la San Francisco (b).
(a)(sursa: USGS)
(b)(http://www.ngdc.noaa.gov/)
Figura 3.14. Alunecări de teren în La Conchita, California, 1995 (a); Partea de sud-est a golfului Izmit,inundat ca urmare a subsidenei în timpul cutremurului din 17 august 1999 din Izmit, Turcia.
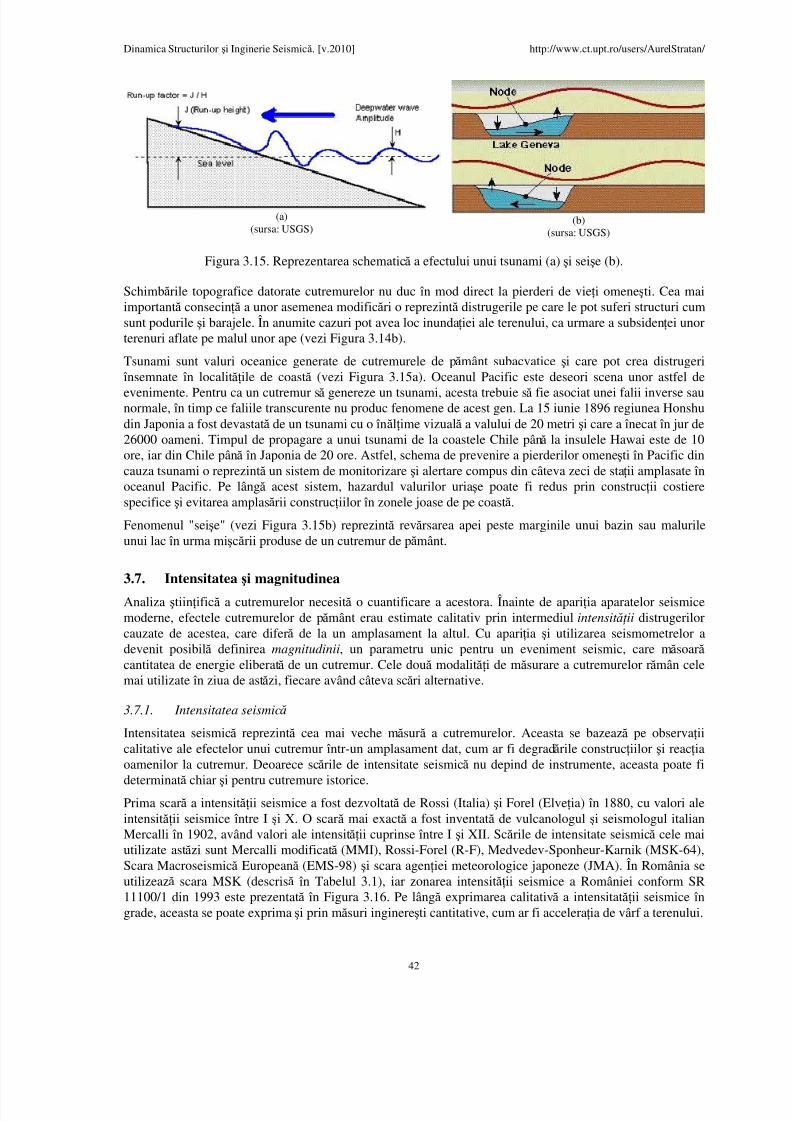
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 43/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
42
(a)(sursa: USGS)
(b)(sursa: USGS)
Figura 3.15. Reprezentarea schematică a efectului unui tsunami (a) şi seişe (b).
Schimbările topografice datorate cutremurelor nu duc în mod direct la pierderi de vie i omeneşti. Cea maiimportantă consecină a unor asemenea modificări o reprezintă distrugerile pe care le pot suferi structuri cumsunt podurile şi barajele. În anumite cazuri pot avea loc inundaiei ale terenului, ca urmare a subsidenei unorterenuri aflate pe malul unor ape (vezi Figura 3.14b).
Tsunami sunt valuri oceanice generate de cutremurele de pământ subacvatice şi care pot crea distrugeri însemnate în localităile de coastă (vezi Figura 3.15a). Oceanul Pacific este deseori scena unor astfel deevenimente. Pentru ca un cutremur să genereze un tsunami, acesta trebuie să fie asociat unei falii inverse saunormale, în timp ce faliile transcurente nu produc fenomene de acest gen. La 15 iunie 1896 regiunea Honshudin Japonia a fost devastată de un tsunami cu o înălime vizuală a valului de 20 metri şi care a înecat în jur de26000 oameni. Timpul de propagare a unui tsunami de la coastele Chile până la insulele Hawai este de 10ore, iar din Chile până în Japonia de 20 ore. Astfel, schema de prevenire a pierderilor omeneşti în Pacific dincauza tsunami o reprezintă un sistem de monitorizare şi alertare compus din câteva zeci de staii amplasate înoceanul Pacific. Pe lângă acest sistem, hazardul valurilor uriaşe poate fi redus prin construcii costierespecifice şi evitarea amplasării construciilor în zonele joase de pe coastă.
Fenomenul "seişe" (vezi Figura 3.15b) reprezintă revărsarea apei peste marginile unui bazin sau malurileunui lac în urma mişcării produse de un cutremur de pământ.
3.7. Intensitatea şi magnitudinea
Analiza ştiinifică a cutremurelor necesită o cuantificare a acestora. Înainte de apariia aparatelor seismicemoderne, efectele cutremurelor de pământ erau estimate calitativ prin intermediul intensit ă ii distrugerilorcauzate de acestea, care diferă de la un amplasament la altul. Cu apariia şi utilizarea seismometrelor adevenit posibilă definirea magnitudinii, un parametru unic pentru un eveniment seismic, care măsoară cantitatea de energie eliberată de un cutremur. Cele două modalităi de măsurare a cutremurelor rămân celemai utilizate în ziua de astăzi, fiecare având câteva scări alternative.
3.7.1. Intensitatea seismică Intensitatea seismică reprezintă cea mai veche măsură a cutremurelor. Aceasta se bazează pe observaiicalitative ale efectelor unui cutremur într-un amplasament dat, cum ar fi degradările construciilor şi reaciaoamenilor la cutremur. Deoarece scările de intensitate seismică nu depind de instrumente, aceasta poate fideterminată chiar şi pentru cutremure istorice.
Prima scară a intensităii seismice a fost dezvoltată de Rossi (Italia) şi Forel (Elveia) în 1880, cu valori aleintensităii seismice între I şi X. O scară mai exactă a fost inventată de vulcanologul şi seismologul italianMercalli în 1902, având valori ale intensităii cuprinse între I şi XII. Scările de intensitate seismică cele maiutilizate astăzi sunt Mercalli modificată (MMI), Rossi-Forel (R-F), Medvedev-Sponheur-Karnik (MSK-64),Scara Macroseismică Europeană (EMS-98) şi scara ageniei meteorologice japoneze (JMA). În România seutilizează scara MSK (descrisă în Tabelul 3.1), iar zonarea intensităii seismice a României conform SR
11100/1 din 1993 este prezentată în Figura 3.16. Pe lângă exprimarea calitativă a intensitatăii seismice îngrade, aceasta se poate exprima şi prin măsuri inginereşti cantitative, cum ar fi acceleraia de vârf a terenului.
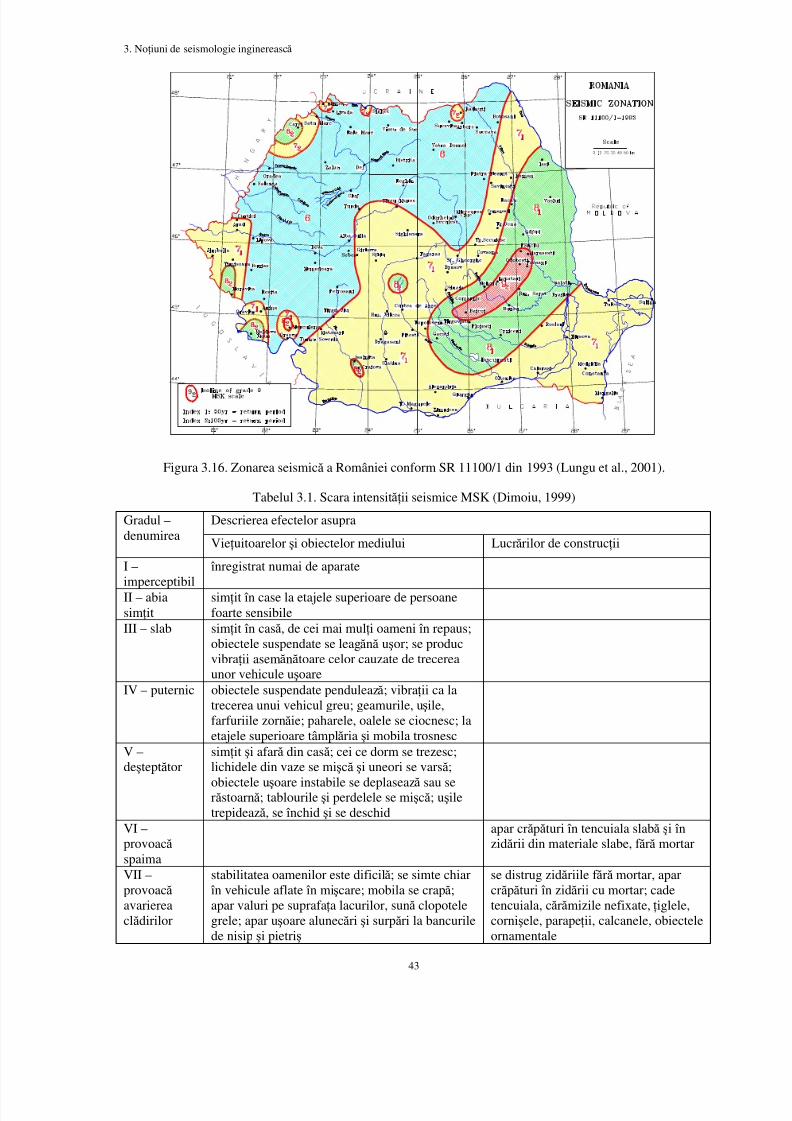
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 44/149
3. Noiuni de seismologie inginerească
43
Figura 3.16. Zonarea seismică a României conform SR 11100/1 din 1993 (Lungu et al., 2001).
Tabelul 3.1. Scara intensităii seismice MSK (Dimoiu, 1999)
Descrierea efectelor asupraGradul –
denumirea Vieuitoarelor şi obiectelor mediului Lucrărilor de construcii
I –imperceptibil
înregistrat numai de aparate
II – abiasimit
simit în case la etajele superioare de persoanefoarte sensibile
III – slab simit în casă, de cei mai muli oameni în repaus;obiectele suspendate se leagănă uşor; se producvibraii asemănătoare celor cauzate de trecereaunor vehicule uşoare
IV – puternic obiectele suspendate pendulează; vibraii ca latrecerea unui vehicul greu; geamurile, uşile,farfuriile zornăie; paharele, oalele se ciocnesc; laetajele superioare tâmplăria şi mobila trosnesc
V –deşteptător
simit şi afară din casă; cei ce dorm se trezesc;lichidele din vaze se mişcă şi uneori se varsă;obiectele uşoare instabile se deplasează sau serăstoarnă; tablourile şi perdelele se mişcă; uşiletrepidează, se închid şi se deschid
VI –provoacă spaima
apar crăpături în tencuiala slabă şi înzidării din materiale slabe, f ără mortar
VII –
provoacă avariereaclădirilor
stabilitatea oamenilor este dificilă; se simte chiar
în vehicule aflate în mişcare; mobila se crapă;apar valuri pe suprafaa lacurilor, sună clopotelegrele; apar uşoare alunecări şi surpări la bancurilede nisip şi pietriş
se distrug zidăriile f ără mortar, apar
crăpături în zidării cu mortar; cadetencuiala, cărămizile nefixate, iglele,cornişele, parapeii, calcanele, obiecteleornamentale
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 45/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
44
VIII –provoacă avariiputernice
copacii se rup, vehiculele sunt greu de condus, semodifică temperatura sau debitul izvoarelor orisondelor; apar crăpături în terenuri umede şi pepante
apar avarii şi la construciile bineexecutate; cele slab construite sedărâmă parial; coşurile de fum,monumentele înalte se răsucesc pesoclu, se prăbuşesc; construciile semişcă pe fundaii; ferestrele nefixate înperei sunt aruncate afară
IX –provoacă avarii foarteimportante
panică generală; apar crăpături în sol; în regiunialuvionare âşneşte nisip şi mâl; apar izvoare noişi cratere de nisip
zidăriile slabe sunt distruse, cele cumortar sunt puternic avariate; aparavarii la fundaii, se rup conducte
X –distrugător
alunecări masive de teren; apa este aruncată pestemalurile râurilor, lacurilor, etc.; şinele de caleferată sunt uşor îndoite
majoritatea clădirilor din zidărie suntdistruse, la scheletele din beton armatzidăria de umplutură este aruncată afară, iar capetele stâlpilor suntmăcinate, stâlpii din oel se îndoaie;avarii serioase la taluzuri, diguri, baraje
XI –
catastrofal
traversele şi şinele de cale ferată sunt puternic
încovoiate; conductele îngropate sunt scoase dinfolosină
surparea tuturor construciilor din
zidărie; avarii grave la construciile cuschelet din beton armat şi oelXII –provoacă modificareareliefului
se modifică liniile de nivel ale reliefului;deplasări şi alunecări de maluri; râurile î şischimbă cursul; apar căderi de apă; obiectele depe sol sunt aruncate în aer
3.7.2. Magnitudinea
Magnitudinea este o măsură a energiei eliberate de un cutremur, fiind o valoare unică pentru un evenimentseismic, spre deosebire de intensitate, care are valori diferite funcie de distana faă de epicentru şi condiiilelocale de amplasament. Magnitudinea se bazează pe măsurători instumentate şi astfel nu prezintă gradul de
subiectivism pe care îl are intensitatea seismică.O măsură strict cantitativă a cutremurelor a fost introdusă de Wadati în 1931 în Japonia şi dezvoltată în 1935de Charles Richter în California, SUA. Richter a definit magnitudinea locală M L a unui cutremur ca fiindlogaritmul cu baza zece a amplitudinii în microni (10-3 mm) A înregistrată cu un seismograf Wood-Andersonamplasat la o distană de 100 km de epicentru:
0log log L
M A A= − (3.1)
0log A este o valoare standard funcie de distană, pentru instrumente aflate la alte distane decât 100 km, dar
nu mai departe de 600 km de epicentru. Relaia (3.1) implică creşterea de zece ori a amplitudinii deplasărilor înregistrate de seismograf la creşterea magnitudinii cu o unitate. Pentru aceeaşi creştere a magnitudinii cu ounitate, cantitatea de energie seismică eliberată de un cutremur creşte de aproximativ 30 de ori.
Scara de magnitudini locale ( M L) a fost definită pentru cutremurele de suprafaă din California de sud, fiindvalabilă pentru distane epicentrale mai mici de 600 km. Ulterior au fost dezvoltate alte scări de magnitudini,descrise pe scurt în continuare.
Magnitudinea undelor de suprafa ă (M s). Undele de suprafaă cu o perioadă de aproximativ 20 secundedomină adeseori înregistrările seismografice ale cutremurelor îndepărtate (distane epicentrale mai mari de2000 km). Pentru cuantificarea acestor cutremure, Guttenberg a definit scara de magnitudini a undelor desuprafaă, care măsoară amplitudinea undelor de suprafaă cu perioada de 20 secunde.
Magnitudinea undelor de volum (mb). Cutremurele de adâncime sunt caracterizate de unde de suprafaă nesemnificative. De aceea, pentru acest tip de cutremure, magnitudinea mb se determină pe baza amplitudiniiundelor P, care nu sunt afectate de adâncimea hipocentrului.
Magnitudinea moment (M W ). Magnitudinile M L, mb şi, într-o măsură mai mică, M s întâmpină dificultăi îndistingerea între cutremurele foarte puternice. Ca urmare a acestui fapt, a fost dezvoltată magnitudineamoment M W , care depinde de momentul seismic M 0, aflat în relaie directă cu dimensiunea sursei seismice:

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 46/149
3. Noiuni de seismologie inginerească
45
( )0log /1.5 10.7W M M = − (3.2)
unde M 0 este momentul seismic în dyn-cm.
Fenomenul de saturaie se referă la subestimarea energiei cutremurelor puternice şi este caracteristicmagnitudinilor M L, mb şi într-o măsură mai mică M s. Magnitudinea moment M W nu suferă de acestdezavantaj şi de aceea este preferată în prezent de seismologi.
3.8. Înregistrarea mişcării seismice
Un seismograf este un instrument care măsoară mişcarea suprafeei terenului din cauza undelor generate deun cutremur de pământ, funcie de timp. În Figura 3.17a este prezentat schematic principiul de funcionare aunui seismograf. Seismograma, reprezentând înregistrarea efectuată cu ajutorul seismografului oferă informaii despre natura cutremurului de pământ.
Conceptual, un seismograf este alcătuit dintr-un pendul sau o masă ataşată unui resort elastic. În timpul unuicutremur, rola de hârtie fixată de baza seismografului se mişcă odată cu terenul în timp ce pendulul împreună cu stiloul ataşat acestuia rămân mai mult sau mai puin în repaus, datorită forelor de inerie, înregistrândmişcarea seismică. După încetarea mişcării seismice pendulul va tinde să ajungă în echilibru, efectuând
înregistrări false ale mişcării. De aceea este necesar un mecanism de amortizare.Instrumentele moderne de înregistrare a mişcării seismice se numesc generic seismometre. Cele mai uzualeinstrumente sunt accelerometrele (Figura 3.17b), care înregistrează digital acceleraia terenului, cea mai utilă
în ingineria seismică. Un astfel de instrument are de obicei trei senzori: doi pentru înregistrareacomponentelor orizontale (nord-sud şi est-vest), şi un al treilea pentru componenta verticală a mişcăriiseismice. Acceleraia este uzual exprimată în cm/s2, fie este raportată la acceleraia gravitaională g=981 cm/s2. Valorile vitezei şi cele ale deplasării terenului în urma unei mişcări seismice se pot obineulterior prin integrarea acceleraiei. Cu titlu de exemplu, Figura 3.18 prezintă înregistrări pentrucomponentele nord-sud ale acceleraiei, vitezei şi deplasării efectuate la staia INCERC-Bucureşti în timpulcutremurului din 04 martie 1977 din Vrancea. Valoarea maximă a acceleraiei înregistrate este uzualdenumită valoarea de vârf a accelera iei terenului. Pentru componenta nord-sud a mişcării seismice
menionate anterior aceasta are o valoare absolută de 1.95 m/s2
.
(a) (b)
Figura 3.17. Conceptul unui seismograf (a) şi un accelerometru modern (b).
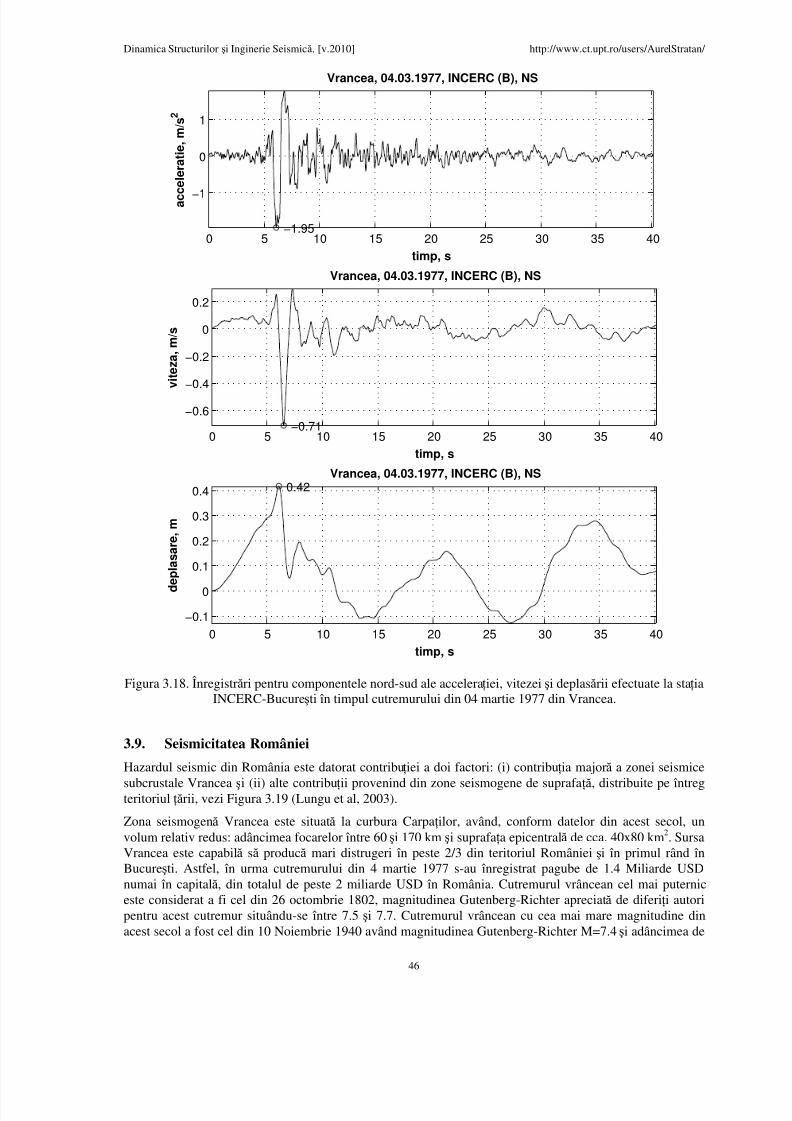
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 47/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
46
0 5 10 15 20 25 30 35 40
−1
0
1
−1.95
timp, s
a c c e l e r a t i e , m / s 2
Vrancea, 04.03.1977, INCERC (B), NS
0 5 10 15 20 25 30 35 40
−0.6
−0.4
−0.2
0
0.2
−0.71
timp, s
v i t e z a , m / s
Vrancea, 04.03.1977, INCERC (B), NS
0 5 10 15 20 25 30 35 40
−0.1
0
0.1
0.2
0.3
0.4 0.42
timp, s
d e p l a s a r e ,
m
Vrancea, 04.03.1977, INCERC (B), NS
Figura 3.18. Înregistrări pentru componentele nord-sud ale acceleraiei, vitezei şi deplasării efectuate la staiaINCERC-Bucureşti în timpul cutremurului din 04 martie 1977 din Vrancea.
3.9. Seismicitatea României
Hazardul seismic din România este datorat contribuiei a doi factori: (i) contribuia majoră a zonei seismicesubcrustale Vrancea şi (ii) alte contribuii provenind din zone seismogene de suprafaă, distribuite pe întregteritoriul ării, vezi Figura 3.19 (Lungu et al, 2003).
Zona seismogenă Vrancea este situată la curbura Carpailor, având, conform datelor din acest secol, unvolum relativ redus: adâncimea focarelor între 60 şi 170 km şi suprafaa epicentrală de cca. 40x80 km2. SursaVrancea este capabilă să producă mari distrugeri în peste 2/3 din teritoriul României şi în primul rând înBucureşti. Astfel, în urma cutremurului din 4 martie 1977 s-au înregistrat pagube de 1.4 Miliarde USDnumai în capitală, din totalul de peste 2 miliarde USD în România. Cutremurul vrâncean cel mai puterniceste considerat a fi cel din 26 octombrie 1802, magnitudinea Gutenberg-Richter apreciată de diferii autoripentru acest cutremur situându-se între 7.5 şi 7.7. Cutremurul vrâncean cu cea mai mare magnitudine dinacest secol a fost cel din 10 Noiembrie 1940 având magnitudinea Gutenberg-Richter M=7.4 şi adâncimea de
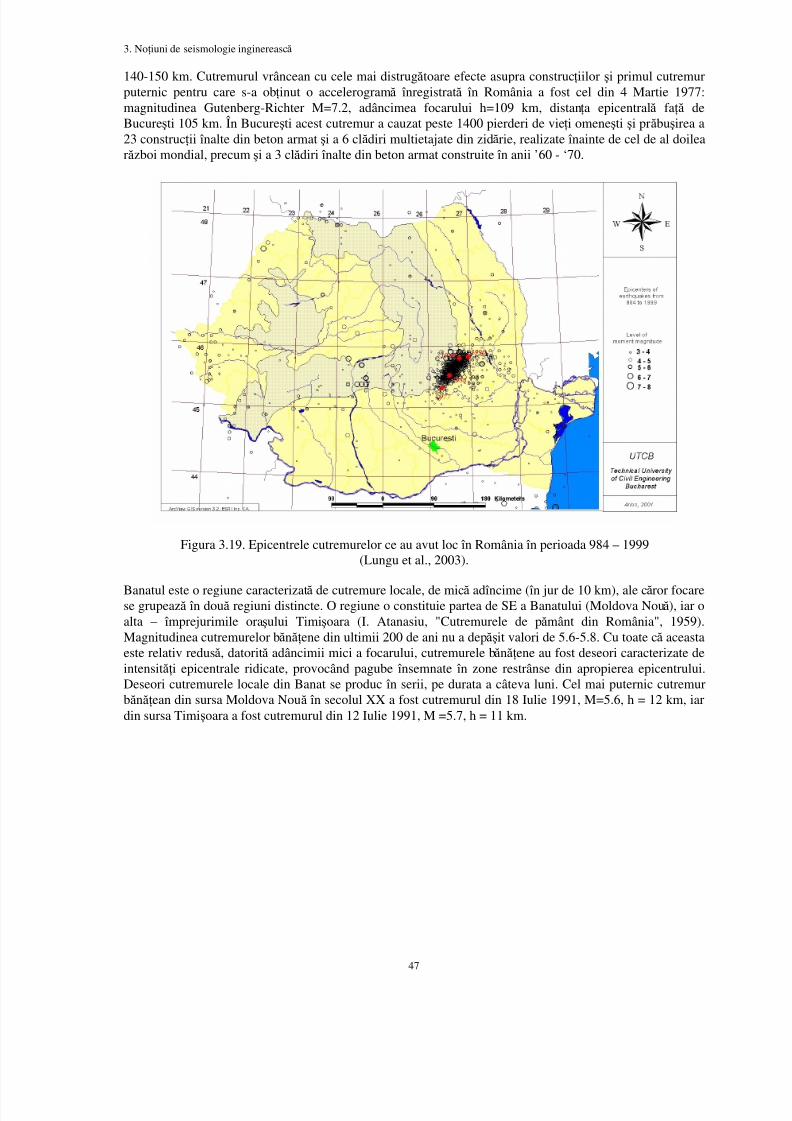
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 48/149
3. Noiuni de seismologie inginerească
47
140-150 km. Cutremurul vrâncean cu cele mai distrugătoare efecte asupra construciilor şi primul cutremurputernic pentru care s-a obinut o accelerogramă înregistrată în România a fost cel din 4 Martie 1977:magnitudinea Gutenberg-Richter M=7.2, adâncimea focarului h=109 km, distana epicentrală faă deBucureşti 105 km. În Bucureşti acest cutremur a cauzat peste 1400 pierderi de viei omeneşti şi prăbuşirea a23 construcii înalte din beton armat şi a 6 clădiri multietajate din zidărie, realizate înainte de cel de al doilearăzboi mondial, precum şi a 3 clădiri înalte din beton armat construite în anii ’60 - ‘70.
Figura 3.19. Epicentrele cutremurelor ce au avut loc în România în perioada 984 – 1999(Lungu et al., 2003).
Banatul este o regiune caracterizată de cutremure locale, de mică adîncime (în jur de 10 km), ale căror focarese grupează în două regiuni distincte. O regiune o constituie partea de SE a Banatului (Moldova Nouă), iar oalta – împrejurimile oraşului Timişoara (I. Atanasiu, "Cutremurele de pământ din România", 1959).Magnitudinea cutremurelor bănăene din ultimii 200 de ani nu a depăşit valori de 5.6-5.8. Cu toate că aceastaeste relativ redusă, datorită adâncimii mici a focarului, cutremurele bănăene au fost deseori caracterizate deintensităi epicentrale ridicate, provocând pagube însemnate în zone restrânse din apropierea epicentrului.Deseori cutremurele locale din Banat se produc în serii, pe durata a câteva luni. Cel mai puternic cutremurbănăean din sursa Moldova Nouă în secolul XX a fost cutremurul din 18 Iulie 1991, M=5.6, h = 12 km, iar
din sursa Timişoara a fost cutremurul din 12 Iulie 1991, M =5.7, h = 11 km.
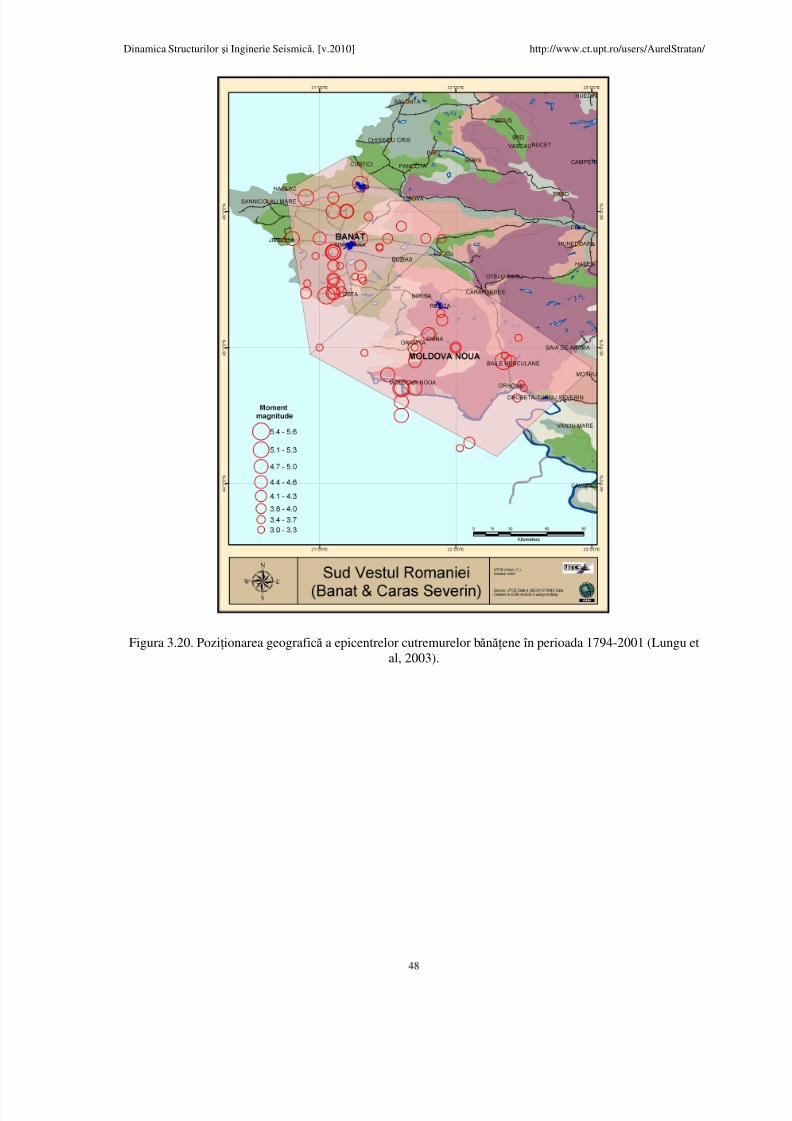
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 49/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
48
Figura 3.20. Poziionarea geografică a epicentrelor cutremurelor bănăene în perioada 1794-2001 (Lungu etal, 2003).
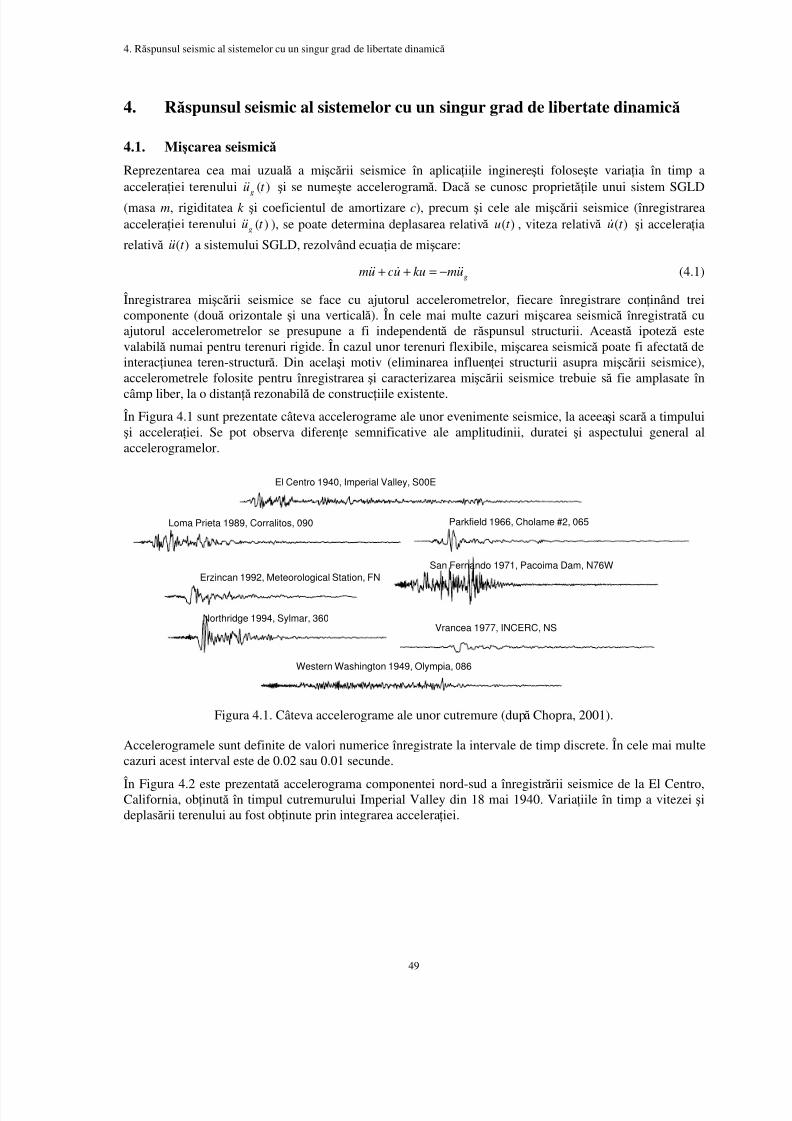
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 50/149
4. Răspunsul seismic al sistemelor cu un singur grad de libertate dinamică
49
4. Răspunsul seismic al sistemelor cu un singur grad de libertate dinamică
4.1. Mişcarea seismică
Reprezentarea cea mai uzuală a mişcării seismice în aplicaiile inginereşti foloseşte variaia în timp aacceleraiei terenului ( )gu t şi se numeşte accelerogramă. Dacă se cunosc proprietăile unui sistem SGLD
(masa m, rigiditatea k şi coeficientul de amortizare c), precum şi cele ale mişcării seismice (înregistrareaacceleraiei terenului ( )gu t ), se poate determina deplasarea relativă ( )u t , viteza relativă ( )u t şi acceleraia
relativă ( )u t a sistemului SGLD, rezolvând ecuaia de mişcare:
gmu cu ku mu+ + = − (4.1)
Înregistrarea mişcării seismice se face cu ajutorul accelerometrelor, fiecare înregistrare con inând treicomponente (două orizontale şi una verticală). În cele mai multe cazuri mişcarea seismică înregistrată cuajutorul accelerometrelor se presupune a fi independentă de răspunsul structurii. Această ipoteză estevalabilă numai pentru terenuri rigide. În cazul unor terenuri flexibile, mişcarea seismică poate fi afectată deinteraciunea teren-structură. Din acelaşi motiv (eliminarea influenei structurii asupra mişcării seismice),accelerometrele folosite pentru înregistrarea şi caracterizarea mişcării seismice trebuie să fie amplasate încâmp liber, la o distană rezonabilă de construciile existente.
În Figura 4.1 sunt prezentate câteva accelerograme ale unor evenimente seismice, la aceeaşi scară a timpuluişi acceleraiei. Se pot observa diferene semnificative ale amplitudinii, duratei şi aspectului general alaccelerogramelor.
El Centro 1940, Imperial Valley, S00E
Loma Prieta 1989, Corralitos, 090
Parkfield 1966, Cholame #2, 065
Erzincan 1992, Meteorological Station, FN
San Fernando 1971, Pacoima Dam, N76W
Northridge 1994, Sylmar, 360
Vrancea 1977, INCERC, NS
Western Washington 1949, Olympia, 086
Figura 4.1. Câteva accelerograme ale unor cutremure (după Chopra, 2001).
Accelerogramele sunt definite de valori numerice înregistrate la intervale de timp discrete. În cele mai multecazuri acest interval este de 0.02 sau 0.01 secunde.
În Figura 4.2 este prezentată accelerograma componentei nord-sud a înregistrării seismice de la El Centro,California, obinută în timpul cutremurului Imperial Valley din 18 mai 1940. Variaiile în timp a vitezei şideplasării terenului au fost obinute prin integrarea acceleraiei.
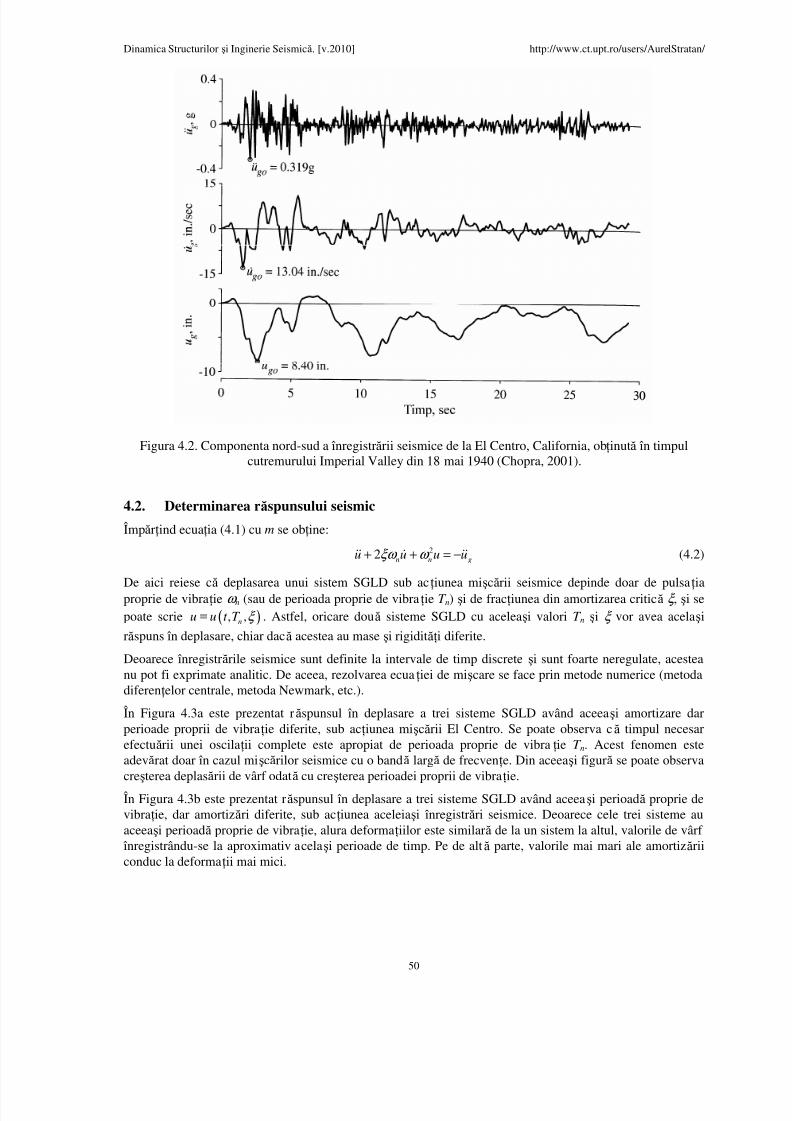
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 51/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
50
Figura 4.2. Componenta nord-sud a înregistrării seismice de la El Centro, California, obinută în timpulcutremurului Imperial Valley din 18 mai 1940 (Chopra, 2001).
4.2. Determinarea răspunsului seismic
Împărind ecuaia (4.1) cu m se obine:22
n n gu u u uξω ω + + = − (4.2)
De aici reiese că deplasarea unui sistem SGLD sub aciunea mişcării seismice depinde doar de pulsaiaproprie de vibraie ω n (sau de perioada proprie de vibraie T n) şi de fraciunea din amortizarea critică ξ , şi sepoate scrie ( ), ,nu u t T ξ ≡ . Astfel, oricare două sisteme SGLD cu aceleaşi valori T n şi ξ vor avea acelaşi
răspuns în deplasare, chiar dacă acestea au mase şi rigidităi diferite.
Deoarece înregistrările seismice sunt definite la intervale de timp discrete şi sunt foarte neregulate, acesteanu pot fi exprimate analitic. De aceea, rezolvarea ecuaiei de mişcare se face prin metode numerice (metodadiferenelor centrale, metoda Newmark, etc.).
În Figura 4.3a este prezentat răspunsul în deplasare a trei sisteme SGLD având aceeaşi amortizare darperioade proprii de vibraie diferite, sub aciunea mişcării El Centro. Se poate observa că timpul necesarefectuării unei oscilaii complete este apropiat de perioada proprie de vibra ie T n. Acest fenomen esteadevărat doar în cazul mişcărilor seismice cu o bandă largă de frecvene. Din aceeaşi figură se poate observacreşterea deplasării de vârf odată cu creşterea perioadei proprii de vibraie.
În Figura 4.3b este prezentat răspunsul în deplasare a trei sisteme SGLD având aceeaşi perioadă proprie devibraie, dar amortizări diferite, sub aciunea aceleiaşi înregistrări seismice. Deoarece cele trei sisteme auaceeaşi perioadă proprie de vibraie, alura deformaiilor este similară de la un sistem la altul, valorile de vârf
înregistrându-se la aproximativ acelaşi perioade de timp. Pe de altă parte, valorile mai mari ale amortizăriiconduc la deformaii mai mici.
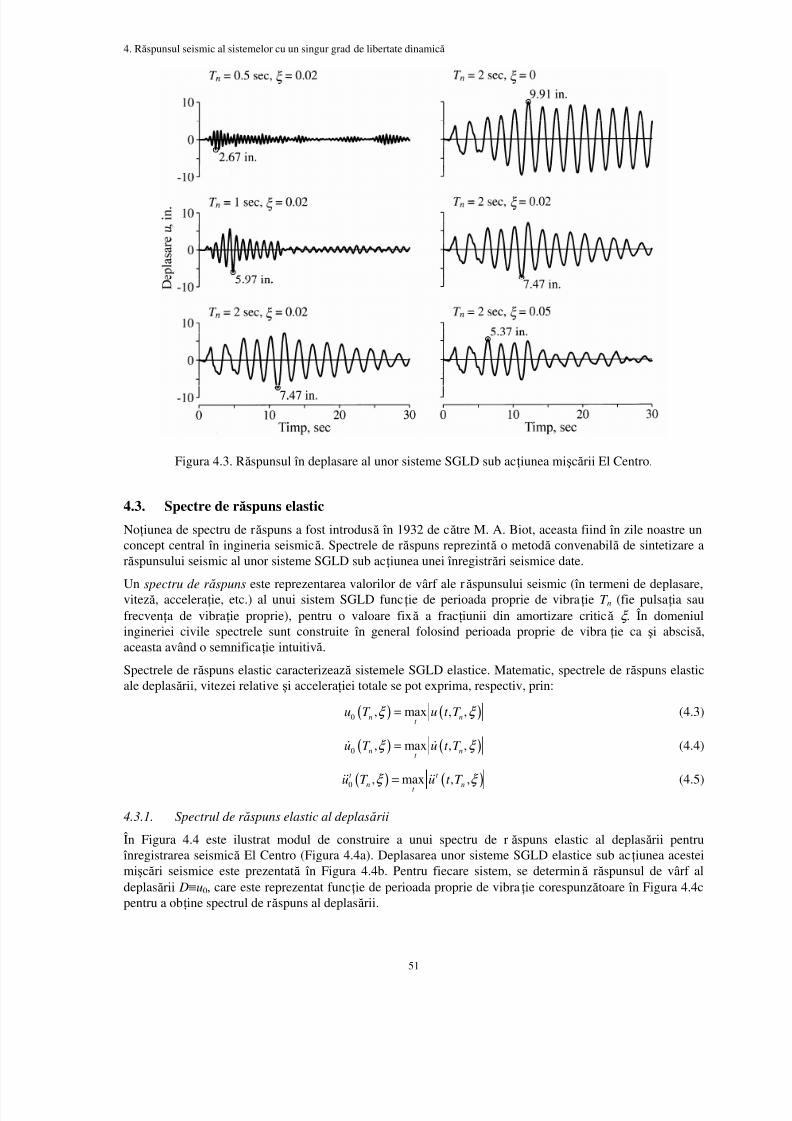
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 52/149
4. Răspunsul seismic al sistemelor cu un singur grad de libertate dinamică
51
Figura 4.3. Răspunsul în deplasare al unor sisteme SGLD sub aciunea mişcării El Centro.
4.3. Spectre de răspuns elastic
Noiunea de spectru de răspuns a fost introdusă în 1932 de către M. A. Biot, aceasta fiind în zile noastre unconcept central în ingineria seismică. Spectrele de răspuns reprezintă o metodă convenabilă de sintetizare arăspunsului seismic al unor sisteme SGLD sub aciunea unei înregistrări seismice date.
Un spectru de r ăspuns este reprezentarea valorilor de vârf ale răspunsului seismic (în termeni de deplasare,viteză, acceleraie, etc.) al unui sistem SGLD funcie de perioada proprie de vibraie T n (fie pulsaia saufrecvena de vibraie proprie), pentru o valoare fixă a fraciunii din amortizare critică ξ . În domeniulingineriei civile spectrele sunt construite în general folosind perioada proprie de vibra ie ca şi abscisă,aceasta având o semnificaie intuitivă.
Spectrele de răspuns elastic caracterizează sistemele SGLD elastice. Matematic, spectrele de răspuns elasticale deplasării, vitezei relative şi acceleraiei totale se pot exprima, respectiv, prin:
( ) ( )0 , max , ,n nt u T u t T ξ ξ = (4.3)
( ) ( )0 , max , ,n n
t u T u t T ξ ξ = (4.4)
( ) ( )0 , max , ,t t
n nt
u T u t T ξ ξ = (4.5)
4.3.1. Spectrul de r ăspuns elastic al deplasării
În Figura 4.4 este ilustrat modul de construire a unui spectru de răspuns elastic al deplasării pentru înregistrarea seismică El Centro (Figura 4.4a). Deplasarea unor sisteme SGLD elastice sub ac iunea acesteimişcări seismice este prezentată în Figura 4.4b. Pentru fiecare sistem, se determină răspunsul de vârf al
deplasării D≡
u0, care este reprezentat funcie de perioada proprie de vibraie corespunzătoare în Figura 4.4cpentru a obine spectrul de răspuns al deplasării.
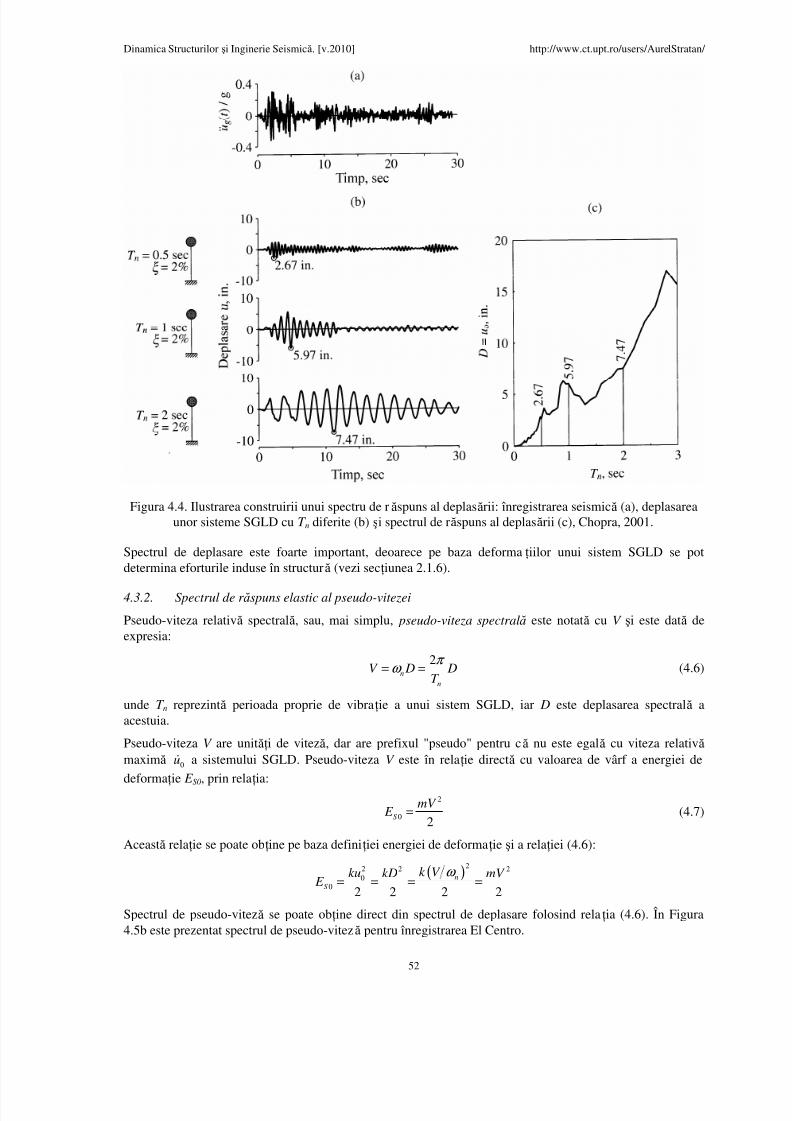
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 53/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
52
Figura 4.4. Ilustrarea construirii unui spectru de răspuns al deplasării: înregistrarea seismică (a), deplasareaunor sisteme SGLD cu T n diferite (b) şi spectrul de răspuns al deplasării (c), Chopra, 2001.
Spectrul de deplasare este foarte important, deoarece pe baza deformaiilor unui sistem SGLD se potdetermina eforturile induse în structură (vezi seciunea 2.1.6).
4.3.2. Spectrul de r ăspuns elastic al pseudo-vitezei
Pseudo-viteza relativă spectrală, sau, mai simplu, pseudo-viteza spectrală este notată cu V şi este dată deexpresia:
2n
n
V D DT
π ω = = (4.6)
unde T n reprezintă perioada proprie de vibraie a unui sistem SGLD, iar D este deplasarea spectrală aacestuia.
Pseudo-viteza V are unităi de viteză, dar are prefixul "pseudo" pentru că nu este egală cu viteza relativă maximă 0u a sistemului SGLD. Pseudo-viteza V este în relaie directă cu valoarea de vârf a energiei de
deformaie E S0, prin relaia:
2
0 2S
mV E = (4.7)
Această relaie se poate obine pe baza definiiei energiei de deformaie şi a relaiei (4.6):
( )22 2 2
00
2 2 2 2
n
S
k V ku kD mV E
ω = = = =
Spectrul de pseudo-viteză se poate obine direct din spectrul de deplasare folosind relaia (4.6). În Figura4.5b este prezentat spectrul de pseudo-viteză pentru înregistrarea El Centro.
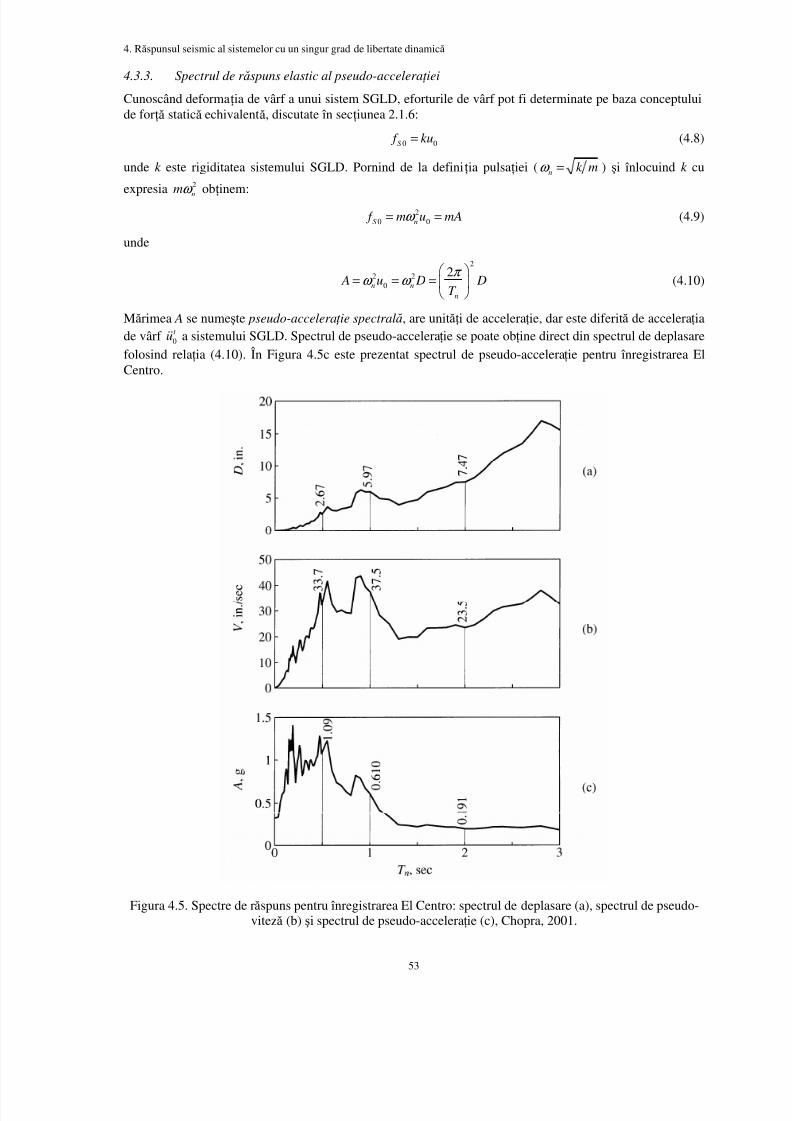
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 54/149
4. Răspunsul seismic al sistemelor cu un singur grad de libertate dinamică
53
4.3.3. Spectrul de r ăspuns elastic al pseudo-accelera iei
Cunoscând deformaia de vârf a unui sistem SGLD, eforturile de vârf pot fi determinate pe baza conceptuluide foră statică echivalentă, discutate în seciunea 2.1.6:
0 0S f ku= (4.8)
unde k este rigiditatea sistemului SGLD. Pornind de la definiia pulsaiei (n
k mω = ) şi înlocuind k cu
expresia 2n
mω obinem:
20 0S n
f m u mAω = = (4.9)
unde
2
2 20
2n n
n
A u D DT
π ω ω
= = =
(4.10)
Mărimea A se numeşte pseudo-accelera ie spectrală, are unităi de acceleraie, dar este diferită de acceleraiade vârf 0
t u a sistemului SGLD. Spectrul de pseudo-acceleraie se poate obine direct din spectrul de deplasare
folosind relaia (4.10). În Figura 4.5c este prezentat spectrul de pseudo-acceleraie pentru înregistrarea ElCentro.
Figura 4.5. Spectre de răspuns pentru înregistrarea El Centro: spectrul de deplasare (a), spectrul de pseudo-viteză (b) şi spectrul de pseudo-acceleraie (c), Chopra, 2001.
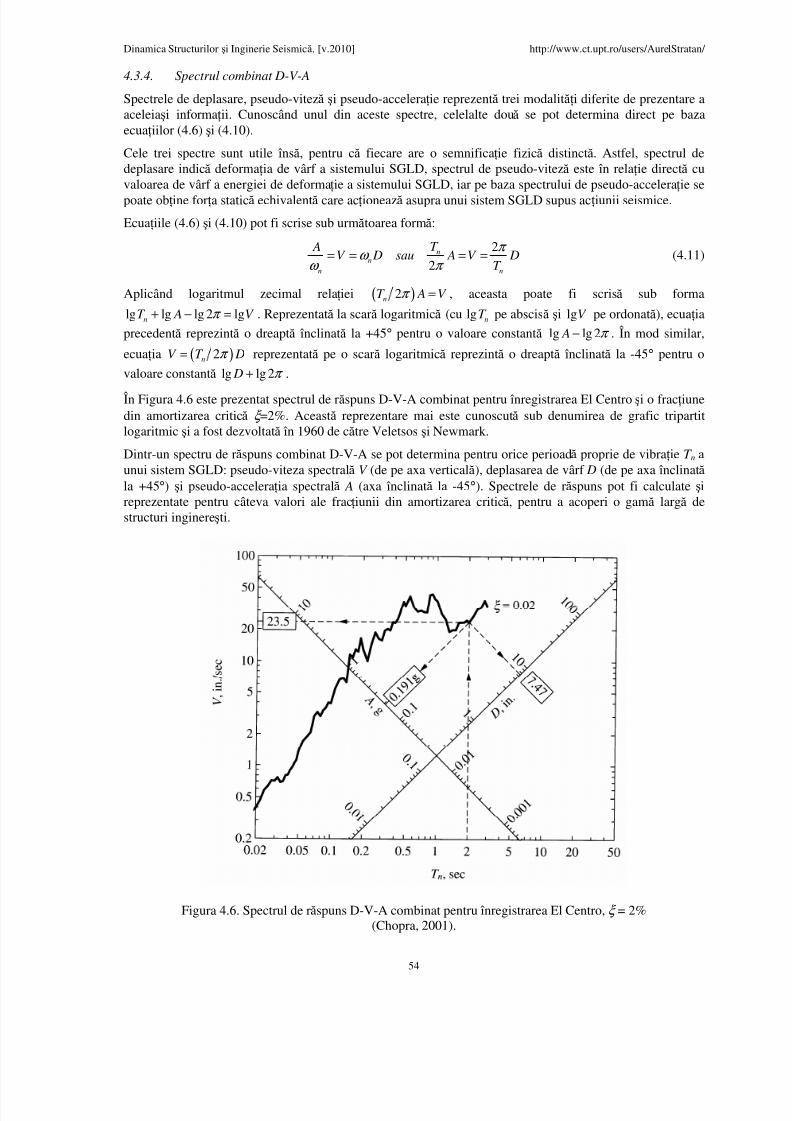
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 55/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
54
4.3.4. Spectrul combinat D-V-A
Spectrele de deplasare, pseudo-viteză şi pseudo-acceleraie reprezentă trei modalităi diferite de prezentare aaceleiaşi informaii. Cunoscând unul din aceste spectre, celelalte două se pot determina direct pe bazaecuaiilor (4.6) şi (4.10).
Cele trei spectre sunt utile însă, pentru că fiecare are o semnificaie fizică distinctă. Astfel, spectrul dedeplasare indică deformaia de vârf a sistemului SGLD, spectrul de pseudo-viteză este în relaie directă cuvaloarea de vârf a energiei de deformaie a sistemului SGLD, iar pe baza spectrului de pseudo-acceleraie sepoate obine fora statică echivalentă care acionează asupra unui sistem SGLD supus aciunii seismice.
Ecuaiile (4.6) şi (4.10) pot fi scrise sub următoarea formă:
2
2n
n
n n
T AV D sau A V D
T
π ω
ω π = = = = (4.11)
Aplicând logaritmul zecimal relaiei ( )2nT A V π = , aceasta poate fi scrisă sub forma
lg lg lg 2 lgn
T A V π + − = . Reprezentată la scară logaritmică (cu lgn
T pe abscisă şi lgV pe ordonată), ecuaia
precedentă reprezintă o dreaptă înclinată la +45° pentru o valoare constantă lg lg 2 A π − . În mod similar,
ecuaia ( )2nV T Dπ = reprezentată pe o scară logaritmică reprezintă o dreaptă înclinată la -45° pentru ovaloare constantă lg lg 2 D π + .
În Figura 4.6 este prezentat spectrul de răspuns D-V-A combinat pentru înregistrarea El Centro şi o fraciunedin amortizarea critică ξ =2%. Această reprezentare mai este cunoscută sub denumirea de grafic tripartitlogaritmic şi a fost dezvoltată în 1960 de către Veletsos şi Newmark.
Dintr-un spectru de răspuns combinat D-V-A se pot determina pentru orice perioadă proprie de vibraie T n aunui sistem SGLD: pseudo-viteza spectrală V (de pe axa verticală), deplasarea de vârf D (de pe axa înclinată la +45°) şi pseudo-acceleraia spectrală A (axa înclinată la -45°). Spectrele de răspuns pot fi calculate şireprezentate pentru câteva valori ale fraciunii din amortizarea critică, pentru a acoperi o gamă largă destructuri inginereşti.
Figura 4.6. Spectrul de răspuns D-V-A combinat pentru înregistrarea El Centro, ξ = 2%(Chopra, 2001).
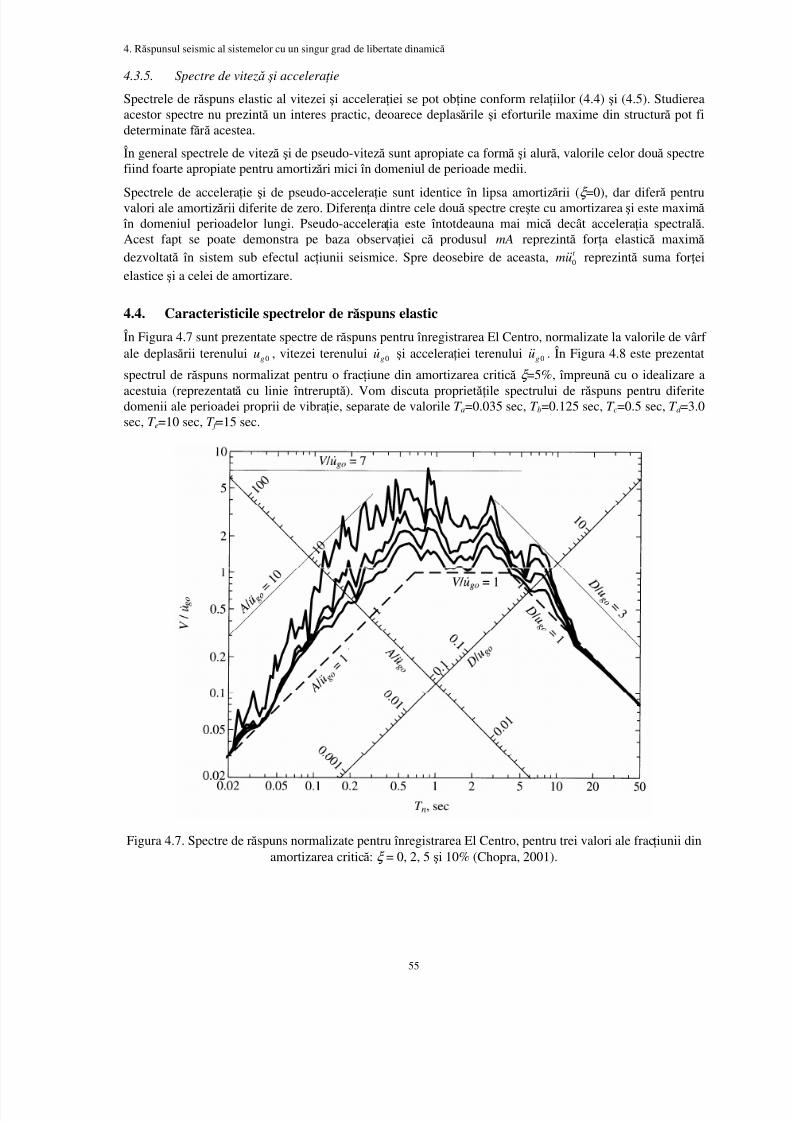
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 56/149
4. Răspunsul seismic al sistemelor cu un singur grad de libertate dinamică
55
4.3.5. Spectre de viteză şi accelera ie
Spectrele de răspuns elastic al vitezei şi acceleraiei se pot obine conform relaiilor (4.4) şi (4.5). Studiereaacestor spectre nu prezintă un interes practic, deoarece deplasările şi eforturile maxime din structură pot fideterminate f ără acestea.
În general spectrele de viteză şi de pseudo-viteză sunt apropiate ca formă şi alură, valorile celor două spectrefiind foarte apropiate pentru amortizări mici în domeniul de perioade medii.
Spectrele de acceleraie şi de pseudo-acceleraie sunt identice în lipsa amortizării (ξ =0), dar diferă pentruvalori ale amortizării diferite de zero. Diferena dintre cele două spectre creşte cu amortizarea şi este maximă
în domeniul perioadelor lungi. Pseudo-acceleraia este întotdeauna mai mică decât acceleraia spectrală.Acest fapt se poate demonstra pe baza observaiei că produsul mA reprezintă fora elastică maximă dezvoltată în sistem sub efectul aciunii seismice. Spre deosebire de aceasta, 0
t mu reprezintă suma forei
elastice şi a celei de amortizare.
4.4. Caracteristicile spectrelor de răspuns elastic
În Figura 4.7 sunt prezentate spectre de răspuns pentru înregistrarea El Centro, normalizate la valorile de vârf
ale deplasării terenului 0gu , vitezei terenului 0gu şi acceleraiei terenului 0gu . În Figura 4.8 este prezentatspectrul de răspuns normalizat pentru o fraciune din amortizarea critică ξ =5%, împreună cu o idealizare aacestuia (reprezentată cu linie întreruptă). Vom discuta proprietăile spectrului de răspuns pentru diferitedomenii ale perioadei proprii de vibraie, separate de valorile T a=0.035 sec, T b=0.125 sec, T c=0.5 sec, T d =3.0sec, T e=10 sec, T f =15 sec.
Figura 4.7. Spectre de răspuns normalizate pentru înregistrarea El Centro, pentru trei valori ale fraciunii dinamortizarea critică: ξ = 0, 2, 5 şi 10% (Chopra, 2001).
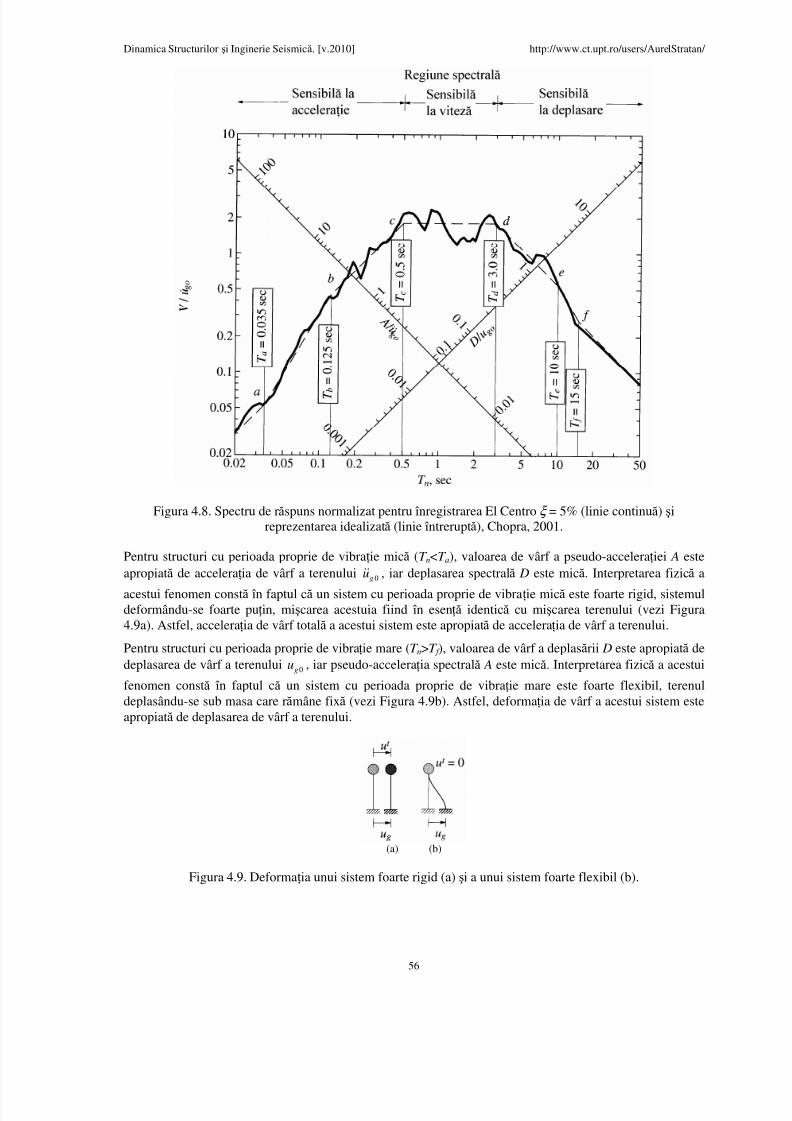
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 57/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
56
Figura 4.8. Spectru de răspuns normalizat pentru înregistrarea El Centro ξ = 5% (linie continuă) şireprezentarea idealizată (linie întreruptă), Chopra, 2001.
Pentru structuri cu perioada proprie de vibraie mică (T n<T a), valoarea de vârf a pseudo-acceleraiei A esteapropiată de acceleraia de vârf a terenului 0gu , iar deplasarea spectrală D este mică. Interpretarea fizică a
acestui fenomen constă în faptul că un sistem cu perioada proprie de vibraie mică este foarte rigid, sistemuldeformându-se foarte puin, mişcarea acestuia fiind în esenă identică cu mişcarea terenului (vezi Figura4.9a). Astfel, acceleraia de vârf totală a acestui sistem este apropiată de acceleraia de vârf a terenului.
Pentru structuri cu perioada proprie de vibraie mare (T n>T f ), valoarea de vârf a deplasării D este apropiată dedeplasarea de vârf a terenului 0gu , iar pseudo-acceleraia spectrală A este mică. Interpretarea fizică a acestui
fenomen constă în faptul că un sistem cu perioada proprie de vibraie mare este foarte flexibil, terenuldeplasându-se sub masa care rămâne fixă (vezi Figura 4.9b). Astfel, deformaia de vârf a acestui sistem este
apropiată de deplasarea de vârf a terenului.
(a) (b)
Figura 4.9. Deformaia unui sistem foarte rigid (a) şi a unui sistem foarte flexibil (b).
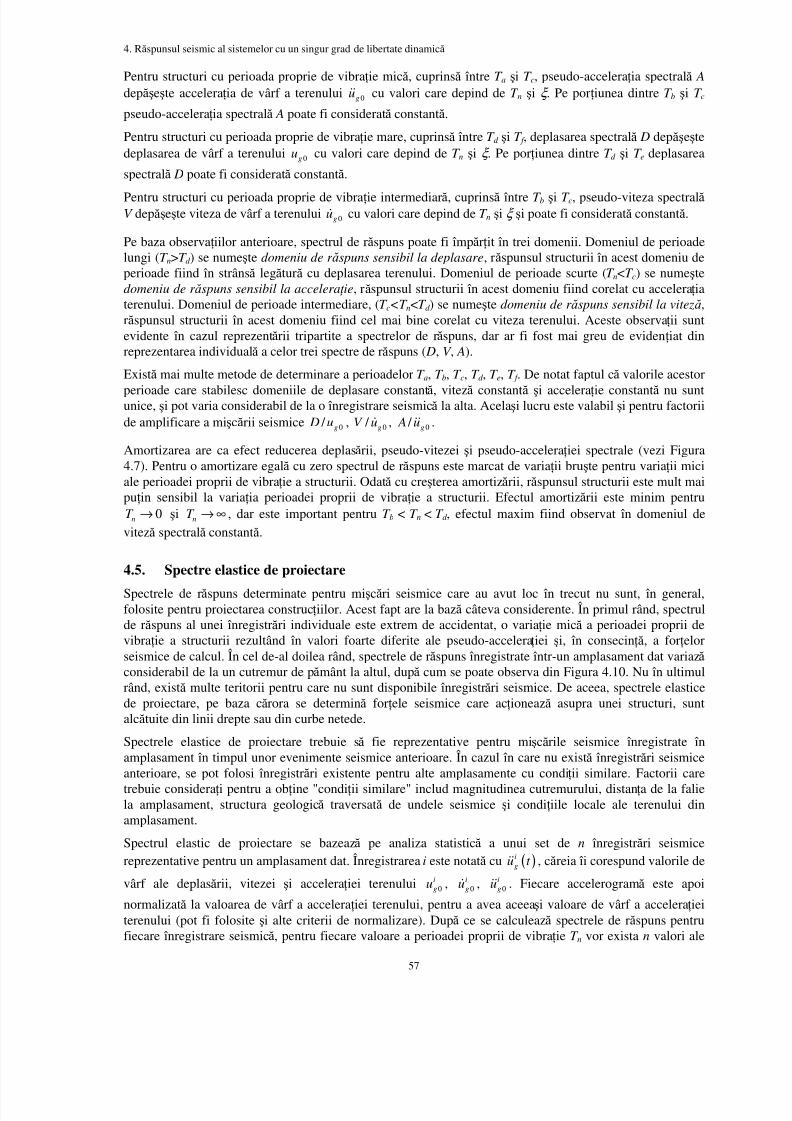
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 58/149
4. Răspunsul seismic al sistemelor cu un singur grad de libertate dinamică
57
Pentru structuri cu perioada proprie de vibraie mică, cuprinsă între T a şi T c, pseudo-acceleraia spectrală A depăşeşte acceleraia de vârf a terenului 0gu cu valori care depind de T n şi ξ . Pe poriunea dintre T b şi T c
pseudo-acceleraia spectrală A poate fi considerată constantă.
Pentru structuri cu perioada proprie de vibraie mare, cuprinsă între T d şi T f , deplasarea spectrală D depăşeştedeplasarea de vârf a terenului 0gu cu valori care depind de T n şi ξ . Pe poriunea dintre T d şi T e deplasarea
spectrală D poate fi considerată constantă.Pentru structuri cu perioada proprie de vibraie intermediară, cuprinsă între T b şi T c, pseudo-viteza spectrală V depăşeşte viteza de vârf a terenului 0gu cu valori care depind de T n şi ξ şi poate fi considerată constantă.
Pe baza observaiilor anterioare, spectrul de răspuns poate fi împărit în trei domenii. Domeniul de perioadelungi (T n>T d ) se numeşte domeniu de r ăspuns sensibil la deplasare, răspunsul structurii în acest domeniu deperioade fiind în strânsă legătură cu deplasarea terenului. Domeniul de perioade scurte (T n<T c) se numeştedomeniu de r ăspuns sensibil la accelera ie, răspunsul structurii în acest domeniu fiind corelat cu acceleraiaterenului. Domeniul de perioade intermediare, (T c<T n<T d ) se numeşte domeniu de r ăspuns sensibil la viteză,răspunsul structurii în acest domeniu fiind cel mai bine corelat cu viteza terenului. Aceste observa ii suntevidente în cazul reprezentării tripartite a spectrelor de răspuns, dar ar fi fost mai greu de evideniat din
reprezentarea individuală a celor trei spectre de răspuns ( D, V , A).Există mai multe metode de determinare a perioadelor T a, T b, T c, T d , T e, T f . De notat faptul că valorile acestorperioade care stabilesc domeniile de deplasare constantă, viteză constantă şi acceleraie constantă nu suntunice, şi pot varia considerabil de la o înregistrare seismică la alta. Acelaşi lucru este valabil şi pentru factoriide amplificare a mişcării seismice 0 / g D u , 0 / gV u , 0 / g A u .
Amortizarea are ca efect reducerea deplasării, pseudo-vitezei şi pseudo-acceleraiei spectrale (vezi Figura4.7). Pentru o amortizare egală cu zero spectrul de răspuns este marcat de variaii bruşte pentru variaii miciale perioadei proprii de vibraie a structurii. Odată cu creşterea amortizării, răspunsul structurii este mult maipuin sensibil la variaia perioadei proprii de vibraie a structurii. Efectul amortizării este minim pentru
0nT → şi nT → ∞ , dar este important pentru T b < T n < T d , efectul maxim fiind observat în domeniul de
viteză spectrală constantă.
4.5. Spectre elastice de proiectare
Spectrele de răspuns determinate pentru mişcări seismice care au avut loc în trecut nu sunt, în general,folosite pentru proiectarea construciilor. Acest fapt are la bază câteva considerente. În primul rând, spectrulde răspuns al unei înregistrări individuale este extrem de accidentat, o variaie mică a perioadei proprii devibraie a structurii rezultând în valori foarte diferite ale pseudo-acceleraiei şi, în consecină, a forelorseismice de calcul. În cel de-al doilea rând, spectrele de răspuns înregistrate într-un amplasament dat variază considerabil de la un cutremur de pământ la altul, după cum se poate observa din Figura 4.10. Nu în ultimulrând, există multe teritorii pentru care nu sunt disponibile înregistrări seismice. De aceea, spectrele elasticede proiectare, pe baza cărora se determină forele seismice care acionează asupra unei structuri, suntalcătuite din linii drepte sau din curbe netede.
Spectrele elastice de proiectare trebuie să fie reprezentative pentru mişcările seismice înregistrate înamplasament în timpul unor evenimente seismice anterioare. În cazul în care nu exist ă înregistrări seismiceanterioare, se pot folosi înregistrări existente pentru alte amplasamente cu condiii similare. Factorii caretrebuie considerai pentru a obine "condiii similare" includ magnitudinea cutremurului, distana de la faliela amplasament, structura geologică traversată de undele seismice şi condiiile locale ale terenului dinamplasament.
Spectrul elastic de proiectare se bazează pe analiza statistică a unui set de n înregistrări seismicereprezentative pentru un amplasament dat. Înregistrarea i este notată cu ( )i
gu t , căreia îi corespund valorile de
vârf ale deplasării, vitezei şi acceleraiei terenului0
i
g
u ,0
i
g
u ,0
i
g
u . Fiecare accelerogramă este apoi
normalizată la valoarea de vârf a acceleraiei terenului, pentru a avea aceeaşi valoare de vârf a acceleraieiterenului (pot fi folosite şi alte criterii de normalizare). După ce se calculează spectrele de răspuns pentrufiecare înregistrare seismică, pentru fiecare valoare a perioadei proprii de vibraie T n vor exista n valori ale
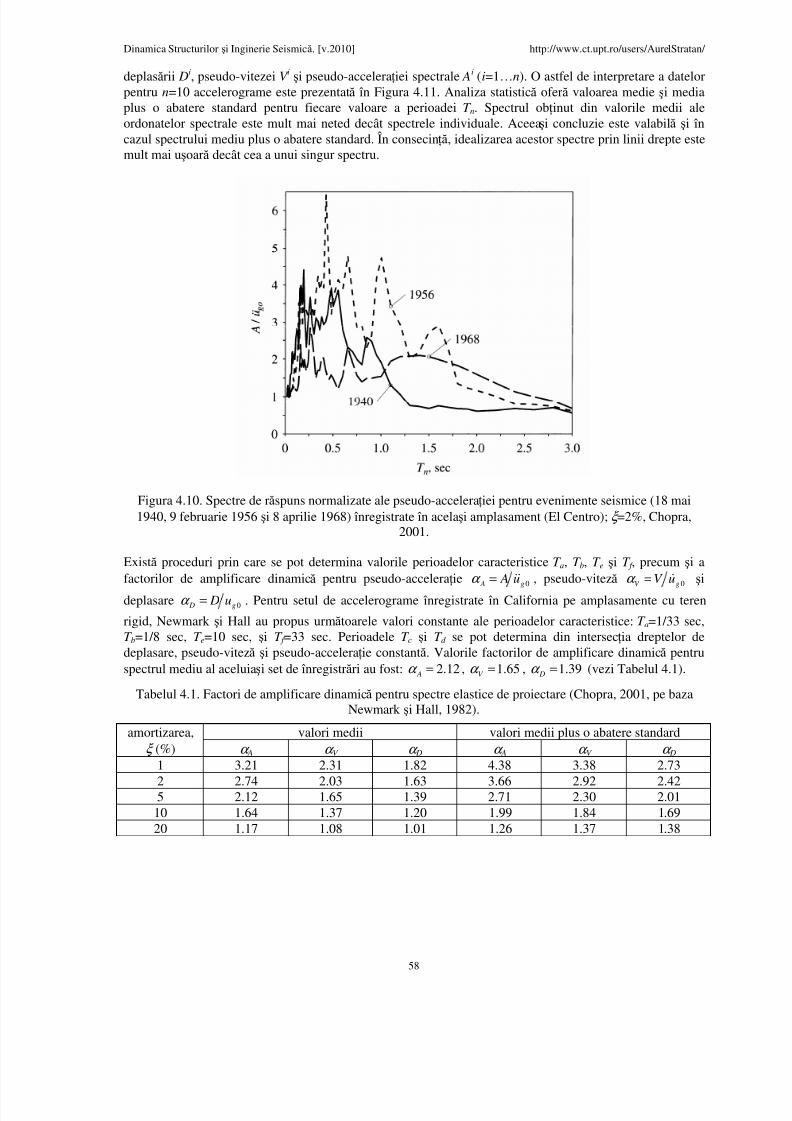
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 59/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
58
deplasării Di, pseudo-vitezei V i şi pseudo-acceleraiei spectrale A
i (i=1…n). O astfel de interpretare a datelorpentru n=10 accelerograme este prezentată în Figura 4.11. Analiza statistică oferă valoarea medie şi mediaplus o abatere standard pentru fiecare valoare a perioadei T n. Spectrul obinut din valorile medii aleordonatelor spectrale este mult mai neted decât spectrele individuale. Aceeaşi concluzie este valabilă şi încazul spectrului mediu plus o abatere standard. În consecină, idealizarea acestor spectre prin linii drepte estemult mai uşoară decât cea a unui singur spectru.
Figura 4.10. Spectre de răspuns normalizate ale pseudo-acceleraiei pentru evenimente seismice (18 mai1940, 9 februarie 1956 şi 8 aprilie 1968) înregistrate în acelaşi amplasament (El Centro); ξ =2%, Chopra,
2001.
Există proceduri prin care se pot determina valorile perioadelor caracteristice T a, T b, T e şi T f , precum şi afactorilor de amplificare dinamică pentru pseudo-acceleraie 0 A g A uα = , pseudo-viteză 0V gV uα = şi
deplasare 0 D g D uα = . Pentru setul de accelerograme înregistrate în California pe amplasamente cu teren
rigid, Newmark şi Hall au propus următoarele valori constante ale perioadelor caracteristice: T a=1/33 sec,T b=1/8 sec, T e=10 sec, şi T f =33 sec. Perioadele T c şi T d se pot determina din intersecia dreptelor dedeplasare, pseudo-viteză şi pseudo-acceleraie constantă. Valorile factorilor de amplificare dinamică pentruspectrul mediu al aceluiaşi set de înregistrări au fost: 2.12 A
α = , 1.65V α = , 1.39 D
α = (vezi Tabelul 4.1).
Tabelul 4.1. Factori de amplificare dinamică pentru spectre elastice de proiectare (Chopra, 2001, pe baza
Newmark şi Hall, 1982).valori medii valori medii plus o abatere standardamortizarea,
ξ (%) α A α V α D α A α V α D 1 3.21 2.31 1.82 4.38 3.38 2.732 2.74 2.03 1.63 3.66 2.92 2.425 2.12 1.65 1.39 2.71 2.30 2.01
10 1.64 1.37 1.20 1.99 1.84 1.6920 1.17 1.08 1.01 1.26 1.37 1.38
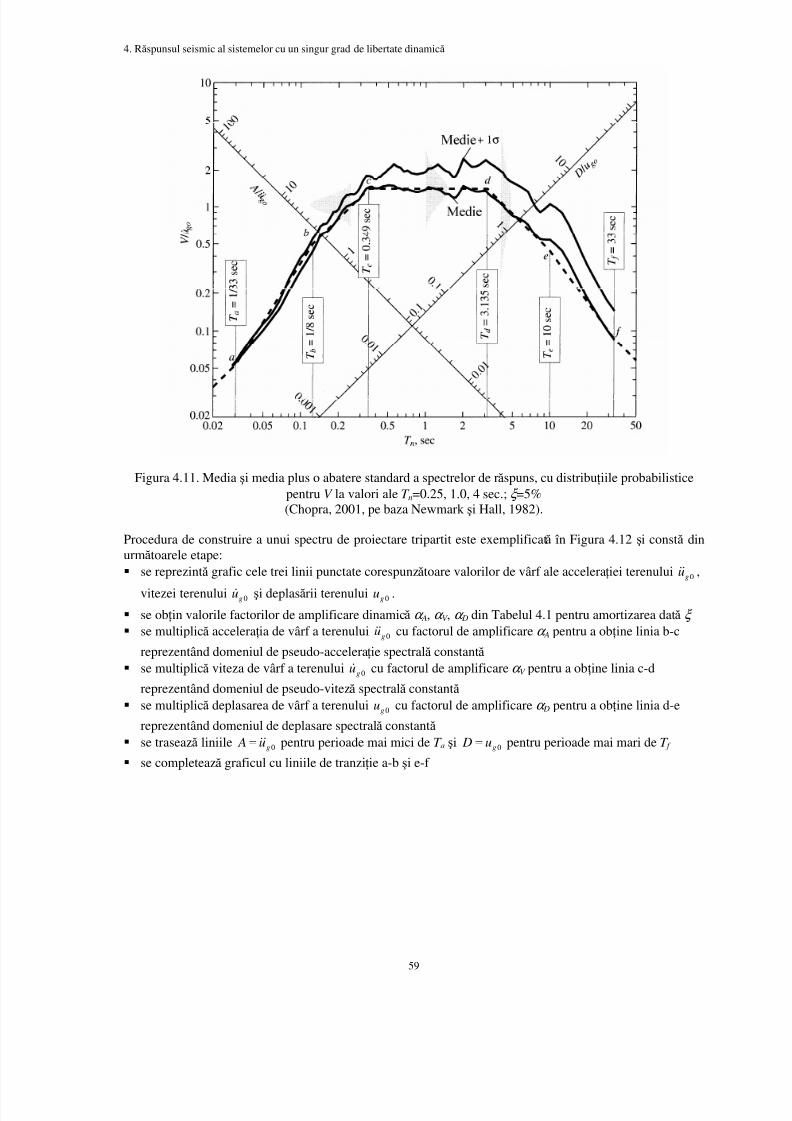
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 60/149
4. Răspunsul seismic al sistemelor cu un singur grad de libertate dinamică
59
Figura 4.11. Media şi media plus o abatere standard a spectrelor de răspuns, cu distribuiile probabilisticepentru V la valori ale T n=0.25, 1.0, 4 sec.; ξ =5%(Chopra, 2001, pe baza Newmark şi Hall, 1982).
Procedura de construire a unui spectru de proiectare tripartit este exemplificată în Figura 4.12 şi constă dinurmătoarele etape: se reprezintă grafic cele trei linii punctate corespunzătoare valorilor de vârf ale acceleraiei terenului 0gu ,
vitezei terenului 0gu şi deplasării terenului 0gu .
se obin valorile factorilor de amplificare dinamică α A, α V , α D din Tabelul 4.1 pentru amortizarea dată ξ se multiplică acceleraia de vârf a terenului 0gu cu factorul de amplificare α A pentru a obine linia b-c
reprezentând domeniul de pseudo-acceleraie spectrală constantă se multiplică viteza de vârf a terenului 0gu cu factorul de amplificare α V pentru a obine linia c-d
reprezentând domeniul de pseudo-viteză spectrală constantă se multiplică deplasarea de vârf a terenului
0g
u cu factorul de amplificare α D pentru a obine linia d-e
reprezentând domeniul de deplasare spectrală constantă se trasează liniile 0g A u= pentru perioade mai mici de T a şi 0g D u= pentru perioade mai mari de T f
se completează graficul cu liniile de tranziie a-b şi e-f
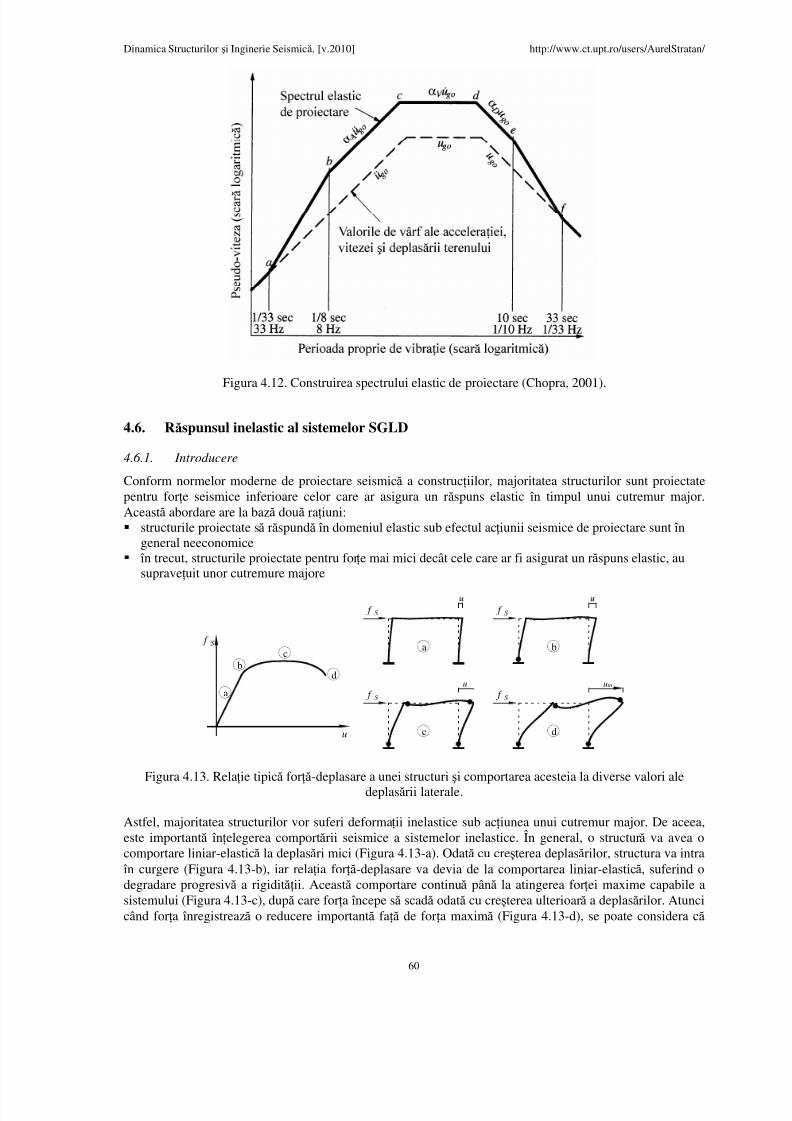
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 61/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
60
Figura 4.12. Construirea spectrului elastic de proiectare (Chopra, 2001).
4.6. Răspunsul inelastic al sistemelor SGLD
4.6.1. Introducere
Conform normelor moderne de proiectare seismică a construciilor, majoritatea structurilor sunt proiectatepentru fore seismice inferioare celor care ar asigura un răspuns elastic în timpul unui cutremur major.Această abordare are la bază două raiuni: structurile proiectate să răspundă în domeniul elastic sub efectul aciunii seismice de proiectare sunt în
general neeconomice în trecut, structurile proiectate pentru fore mai mici decât cele care ar fi asigurat un răspuns elastic, au
supraveuit unor cutremure majore
f S f S
f S f S
u um
a b
c d
f S
u
a
bc
d
Figura 4.13. Relaie tipică foră-deplasare a unei structuri şi comportarea acesteia la diverse valori aledeplasării laterale.
Astfel, majoritatea structurilor vor suferi deformaii inelastice sub aciunea unui cutremur major. De aceea,este importantă înelegerea comportării seismice a sistemelor inelastice. În general, o structură va avea ocomportare liniar-elastică la deplasări mici (Figura 4.13-a). Odată cu creşterea deplasărilor, structura va intra
în curgere (Figura 4.13-b), iar relaia foră-deplasare va devia de la comportarea liniar-elastică, suferind odegradare progresivă a rigidităii. Această comportare continuă până la atingerea forei maxime capabile asistemului (Figura 4.13-c), după care fora începe să scadă odată cu creşterea ulterioară a deplasărilor. Atuncicând fora înregistrează o reducere importantă faă de fora maximă (Figura 4.13-d), se poate considera că

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 62/149
4. Răspunsul seismic al sistemelor cu un singur grad de libertate dinamică
61
structura şi-a epuizat capacitatea de deformare în domeniul inelastic, ajungând la cedare. Deplasareacorespunzătoare cedării structurii se numeşte deplasarea maximă um.
În Figura 4.14a este reprezentată cu linie plină o relaie foră-deplasare tipică a unei structuri. Pentru asimplifica relaia foră-deplasare reală, se adoptă adeseori o idealizare elasto-plastică a acesteia, reprezentată cu linie întreruptă în Figura 4.14a. Un sistem elasto-plastic are o comportare liniar-elastică cu rigiditatea k până la atingerea for ei de curgere f y la deplasarea de curgere u y, după care structura se deformează la o foră
constantă f y (rigiditatea egală cu zero). Există mai multe metode de obinere a curbei idealizate pornind de lacea reală. Una dintre aceste modalităi se bazează pe egalarea ariilor sub curba reală şi cea idealizată. Unsistem elasto-plastic acionat de o mişcare seismică va avea o comportare ciclică, reprezentată schematic înFigura 4.14b.
Pentru a înelege răspunsul seismic al unui sistem SGLD elasto-plastic, este utilă comparaia acestuia curăspunsul unui sistem corespunzător elastic. Acest sistem are aceeaşi rigiditate iniială cu cea a sistemuluielasto-plastic, precum şi aceeaşi amortizare şi masă (vezi Figura 4.15). În consecină, cele două sisteme voravea aceeaşi perioadă proprie de vibraie (doar pentru deformaii mici, perioada proprie de vibraie asistemului inelastic nefiind definită după curgere).
f S
f y
umu y u
real
idealizat
k
1
(a)
(b)
Figura 4.14. Relaia foră-deplasare pentru un sistem inelastic: comportarea reală şi idealizarea acesteia (a);relaia foră-deplasare ciclică pentru un sistem elasto-plastic (b), Chopra, 2001.
Figura 4.15. Un sistem elasto-plastic şi sistemul elastic corespunzător (Chopra, 2001).
Pentru a caracterizarea răspunsul inelastic pot fi introduse două noiuni noi: factorul de reducere al for ei de
curgere R y, şi factorul de ductilitate µ :

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 63/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
62
0 0 y
y y
f u R
f u= = (4.12)
m
y
u
u µ = (4.13)
unde f 0 şi u
0sunt valorile de vârf ale forei şi deplasării sistemului elastic corespunzător. Mărimea f
0poate fi
interpretată ca fiind valoarea minimă a forei de curgere f y necesară pentru a asigura un răspuns elastic alunui sistem SGLD. O valoare supraunitară a factorului de reducere al forei de curgere ( R y > 1) implică producerea unor deformaii plastice în sistemul SGLD. Factorul de ductilitate µ este supraunitar pentrusisteme care au depăşit deplasarea de curgere şi reprezintă o măsură adimensională a gradului de deformareinelastică a sistemului.
Ecuaia de mişcare pentru un sistem SGLD inelastic sub efectul mişcării seismice este:
( ),S gmu cu f u u mu+ + = − (4.14)
Împărind ecuaia (4.14)cu m obinem:
( )
2
2 ,n n y S gu u u f u u uξω ω + + = −
(4.15)unde ( ) ( ), ,S S y f u u f u u f = . Ecuaia (4.15) demonstrează că, pentru o mişcare seismică ( )gu t dată,
răspunsul seismic al unui sistem SGLD inelastic depinde de pulsaia proprie de vibraie ω n, fraciunea din
amortizarea critică ξ , deplasarea de curgere u y şi forma relaiei foră-deplasare ( ),S
f u u .
4.6.2. Efectul comport ării elasto-plastice
În Figura 4.16 sunt prezentate patru sisteme SGLD cu aceeaşi perioadă proprie de vibraie (T n = 0.5 sec),amortizare (ξ = 5%), dar cu fore de curgere diferite ( R y = 1, 2, 4, 8), supuse accelerogramei El Centro.Primul dintre acestea ( R y = 1.0) reprezintă un sistem liniar elastic, celelalte trei reprezentând sisteme elasto-plastice cu fore de curgere descrescătoare ( R y = 2, 4, 8).
Sistemul liniar elastic oscilează faă de poziia iniială de echilibru, având o deplasare de vârf de 2.25 oli.Datorită amortizării, după încetarea mişcării seismice oscilaiile se amortizează, deformaia permanentă fiindu p = 0.
Sistemele inelastice intră în curgere ca urmare a oscilaiilor induse de mişcarea seismică. Cu cât fora decurgere este mai mică, cu atât sistemele intră în curgere mai des şi pentru perioade mai lungi de timp.Datorită curgerii, sistemele inelastice sunt deplasate faă de poziia de echilibru iniială, sistemul oscilândfaă de o nouă poziie de echilibru. Datorită acestui fenomen, sistemele inelastice nu revin la poziia iniială după încetarea oscilaiilor, ci au o deformaie permanentă u p ≠ 0. În general, această deformaie permanentă este cu atât mai mare, cu cât fora de curgere a sistemului este mai mică. Astfel, o structură care a suferitdeformaii plastice în urma unui cutremur de pământ ar putea avea o poziie deviată de la verticală după
încetarea mişcării seismice. Pentru acest exemplu concret (accelerograma El Centro şi un sistem cuT n = 0.5 sec) deplasarea de vârf a sistemelor inelastice este mai mică decât deplasarea de vârf a sistemuluielastic. Acest aspect nu are un caracter general, deplasarea de vârf a sistemelor inelastice fiind afectată într-omare măsură de perioada proprie de vibraie T n şi caracteristicile mişcării seismice, şi într-o mai mică măsură de amortizare.
Factorul de ductilitate poate fi determinat folosind ecuaia (4.13). Pentru sistemul cu R y = 4, factorul deductilitate este egal cu 3.11 şi reprezintă cerin a de ductilitate impusă sistemului. Pentru ca un sisteminelastic să nu cedeze, cerina de ductilitate impusă de o mişcare seismică trebuie să fie mai mică decâtductilitatea capabilă (care reprezintă capacitatea unui sistem de a se deforma în domeniul inelastic f ără oreducere semnificativă a forei). Această modalitate de verificare este fundamental diferită de cea folosită încazul unui sistem elastic, în cazul căruia verificarea constă în îndeplinirea condiiei ca cerina de foră impusă
de mişcarea seismică să fie mai mică de fora capabilă a sistemului.
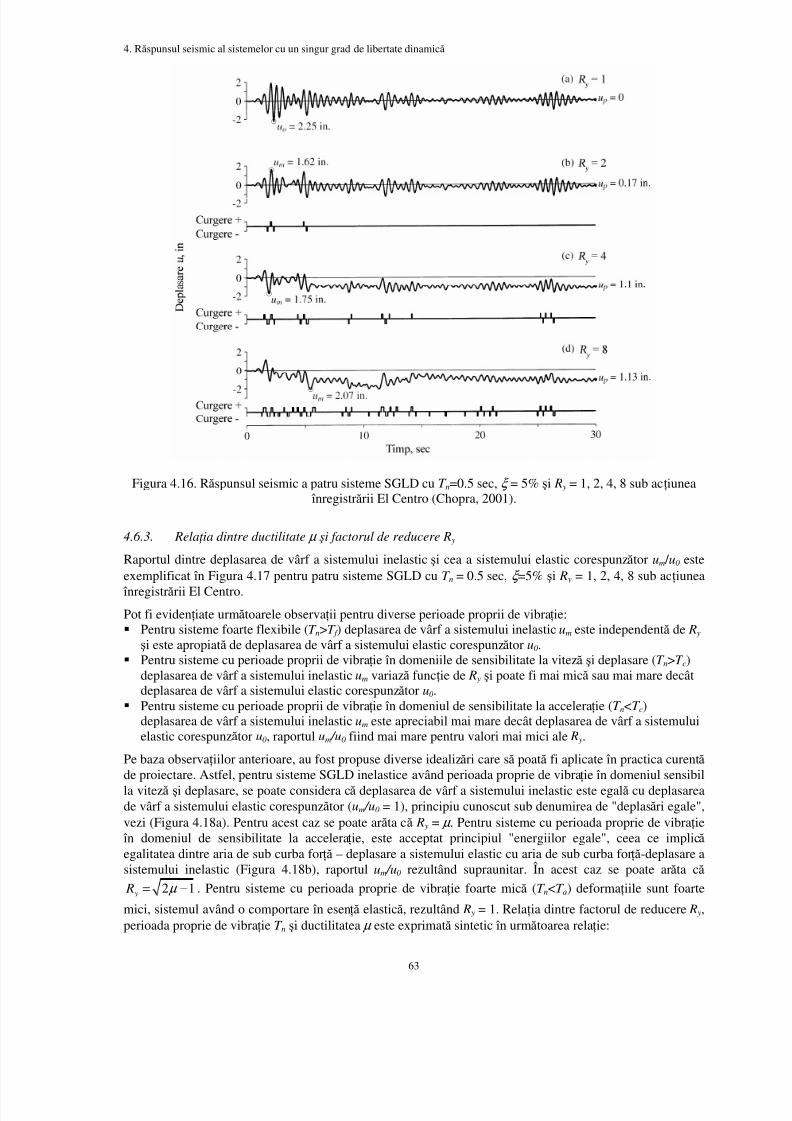
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 64/149
4. Răspunsul seismic al sistemelor cu un singur grad de libertate dinamică
63
Figura 4.16. Răspunsul seismic a patru sisteme SGLD cu T n=0.5 sec, ξ = 5% şi R y = 1, 2, 4, 8 sub aciunea înregistrării El Centro (Chopra, 2001).
4.6.3. Rela ia dintre ductilitate µ şi factorul de reducere R y
Raportul dintre deplasarea de vârf a sistemului inelastic şi cea a sistemului elastic corespunzător um / u0 esteexemplificat în Figura 4.17 pentru patru sisteme SGLD cu T n = 0.5 sec, ξ =5% şi R y = 1, 2, 4, 8 sub aciunea
înregistrării El Centro.
Pot fi evideniate următoarele observaii pentru diverse perioade proprii de vibraie: Pentru sisteme foarte flexibile (T n>T f ) deplasarea de vârf a sistemului inelastic um este independentă de R y
şi este apropiată de deplasarea de vârf a sistemului elastic corespunzător u0. Pentru sisteme cu perioade proprii de vibraie în domeniile de sensibilitate la viteză şi deplasare (T n>T c)
deplasarea de vârf a sistemului inelastic um variază funcie de R y şi poate fi mai mică sau mai mare decâtdeplasarea de vârf a sistemului elastic corespunzător u0.
Pentru sisteme cu perioade proprii de vibraie în domeniul de sensibilitate la acceleraie (T n<T c)deplasarea de vârf a sistemului inelastic um este apreciabil mai mare decât deplasarea de vârf a sistemuluielastic corespunzător u0, raportul um /u0 fiind mai mare pentru valori mai mici ale R y.
Pe baza observaiilor anterioare, au fost propuse diverse idealizări care să poată fi aplicate în practica curentă de proiectare. Astfel, pentru sisteme SGLD inelastice având perioada proprie de vibraie în domeniul sensibilla viteză şi deplasare, se poate considera că deplasarea de vârf a sistemului inelastic este egală cu deplasareade vârf a sistemului elastic corespunzător (um /u0 = 1), principiu cunoscut sub denumirea de "deplasări egale",vezi (Figura 4.18a). Pentru acest caz se poate arăta că R y = µ . Pentru sisteme cu perioada proprie de vibraie
în domeniul de sensibilitate la acceleraie, este acceptat principiul "energiilor egale", ceea ce implică egalitatea dintre aria de sub curba foră – deplasare a sistemului elastic cu aria de sub curba foră-deplasare asistemului inelastic (Figura 4.18b), raportul um /u0 rezultând supraunitar. În acest caz se poate arăta că
2 1 y R µ = − . Pentru sisteme cu perioada proprie de vibraie foarte mică (T n<T a) deformaiile sunt foartemici, sistemul având o comportare în esenă elastică, rezultând R y = 1. Relaia dintre factorul de reducere R y,perioada proprie de vibraie T n şi ductilitatea µ este exprimată sintetic în următoarea relaie:
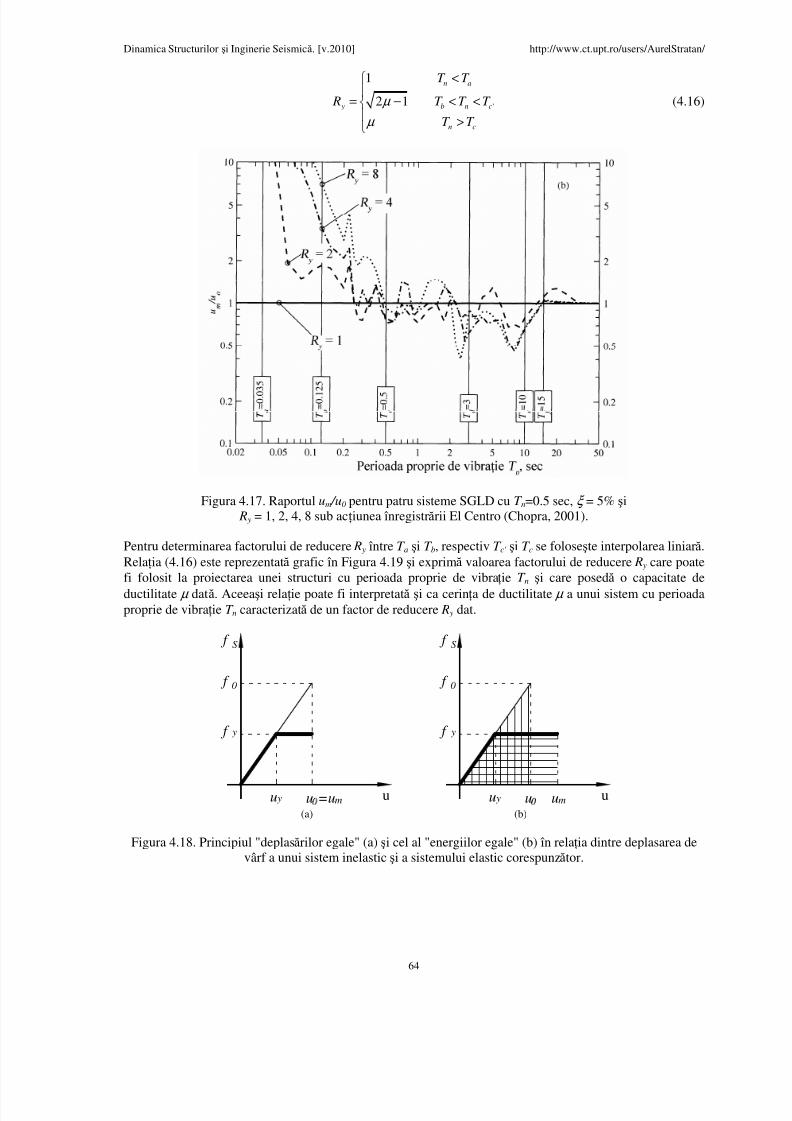
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 65/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
64
'
1
2 1
n a
y b n c
n c
T T
R T T T
T T
µ
µ
<
= − < <
>
(4.16)
Figura 4.17. Raportul um /u0 pentru patru sisteme SGLD cu T n=0.5 sec, ξ = 5% şi R y = 1, 2, 4, 8 sub aciunea înregistrării El Centro (Chopra, 2001).
Pentru determinarea factorului de reducere R y între T a şi T b, respectiv T c' şi T c se foloseşte interpolarea liniară.Relaia (4.16) este reprezentată grafic în Figura 4.19 şi exprimă valoarea factorului de reducere R y care poatefi folosit la proiectarea unei structuri cu perioada proprie de vibraie T n şi care posedă o capacitate deductilitate µ dată. Aceeaşi relaie poate fi interpretată şi ca cerina de ductilitate µ a unui sistem cu perioadaproprie de vibraie T n caracterizată de un factor de reducere R y dat.
u
f S
f 0
f y
u =umu y u
f S
f 0
f y
uu y um (a) (b)
Figura 4.18. Principiul "deplasărilor egale" (a) şi cel al "energiilor egale" (b) în relaia dintre deplasarea devârf a unui sistem inelastic şi a sistemului elastic corespunzător.
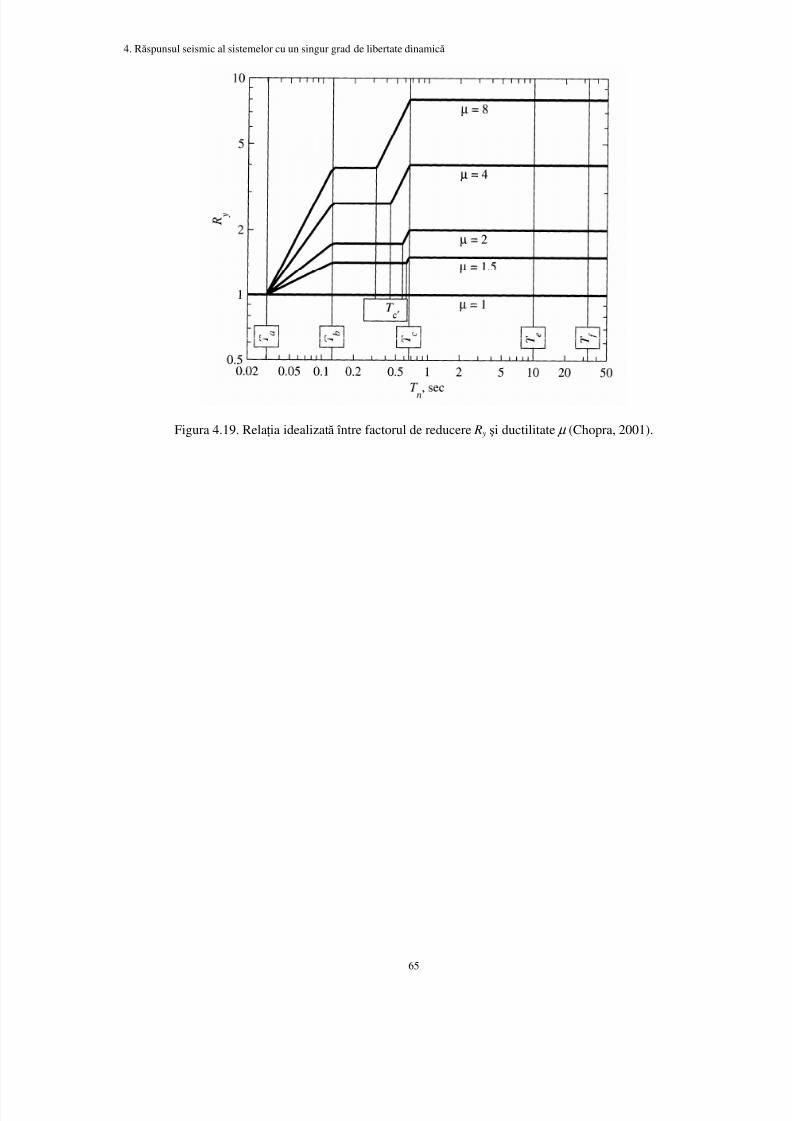
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 66/149
4. Răspunsul seismic al sistemelor cu un singur grad de libertate dinamică
65
Figura 4.19. Relaia idealizată între factorul de reducere R y şi ductilitate µ (Chopra, 2001).
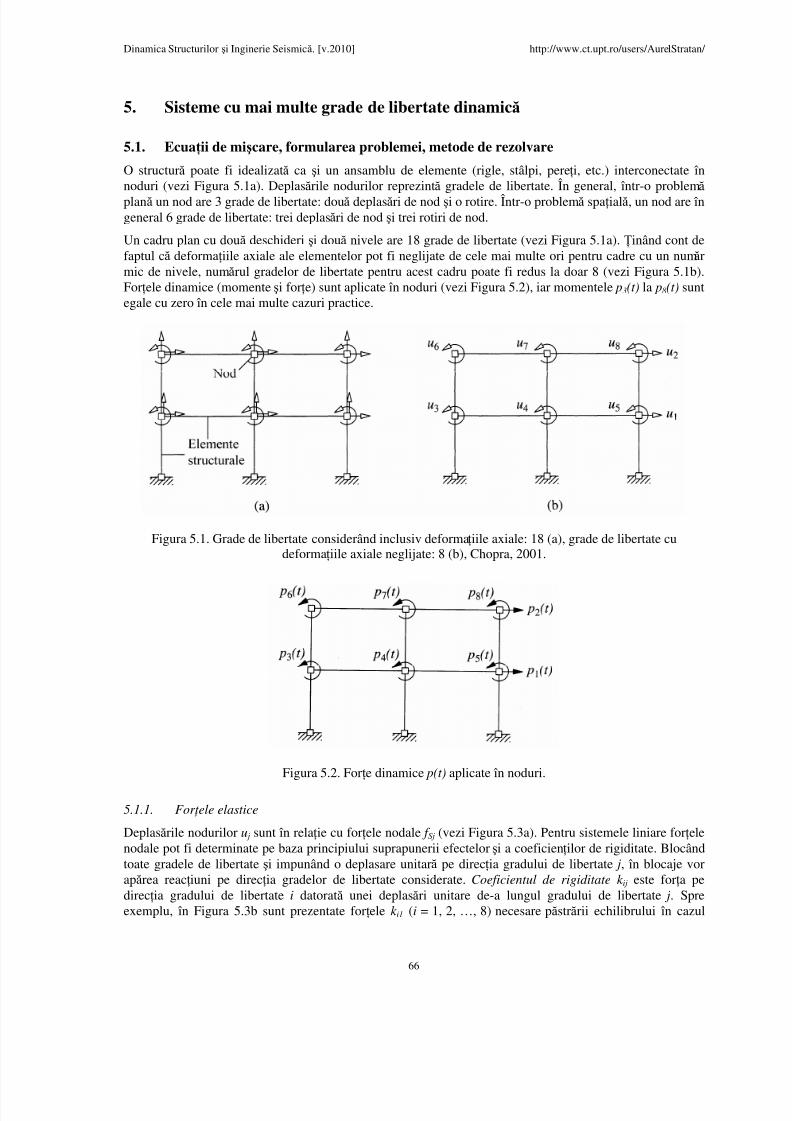
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 67/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
66
5. Sisteme cu mai multe grade de libertate dinamică
5.1. Ecuaii de mişcare, formularea problemei, metode de rezolvare
O structură poate fi idealizată ca şi un ansamblu de elemente (rigle, stâlpi, perei, etc.) interconectate înnoduri (vezi Figura 5.1a). Deplasările nodurilor reprezintă gradele de libertate. În general, într-o problemă plană un nod are 3 grade de libertate: două deplasări de nod şi o rotire. Într-o problemă spaială, un nod are îngeneral 6 grade de libertate: trei deplasări de nod şi trei rotiri de nod.
Un cadru plan cu două deschideri şi două nivele are 18 grade de libertate (vezi Figura 5.1a). inând cont defaptul că deformaiile axiale ale elementelor pot fi neglijate de cele mai multe ori pentru cadre cu un numărmic de nivele, numărul gradelor de libertate pentru acest cadru poate fi redus la doar 8 (vezi Figura 5.1b).Forele dinamice (momente şi fore) sunt aplicate în noduri (vezi Figura 5.2), iar momentele p3(t) la p8(t) suntegale cu zero în cele mai multe cazuri practice.
Figura 5.1. Grade de libertate considerând inclusiv deformaiile axiale: 18 (a), grade de libertate cudeformaiile axiale neglijate: 8 (b), Chopra, 2001.
Figura 5.2. Fore dinamice p(t) aplicate în noduri.
5.1.1. For ele elastice
Deplasările nodurilor u j sunt în relaie cu forele nodale f Sj (vezi Figura 5.3a). Pentru sistemele liniare forelenodale pot fi determinate pe baza principiului suprapunerii efectelor şi a coeficienilor de rigiditate. Blocândtoate gradele de libertate şi impunând o deplasare unitară pe direcia gradului de libertate j, în blocaje vorapărea reaciuni pe direcia gradelor de libertate considerate. Coeficientul de rigiditate k ij este fora pe
direcia gradului de libertate i datorată unei deplasări unitare de-a lungul gradului de libertate j. Spreexemplu, în Figura 5.3b sunt prezentate forele k i1 (i = 1, 2, …, 8) necesare păstrării echilibrului în cazul

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 68/149
5. Sisteme cu mai multe grade de libertate dinamică
67
impunerii unei deplasări unitare u1 = 1. Cu toate că toate forele k ij din Figura 5.3 sunt reprezentate cusemnele lor pozitive, unele dintre acestea vor fi negative pentru a fi compatibile cu deplasările impuse.
Cunoscând coeficienii de rigiditate k ij, forele nodale f Si pe direcia gradului de libertate i, asociate deplasăriiu j, j = 1, 2, …, N se obin folosind principiul suprapunerii efectelor (vezi Figura 5.3a):
1 1 2 2 ... ...Si i i ij j iN N f k u k u k u k u= + + + + + (5.1)
Ecuaiile corespunzătoare i=1, 2, …, N pot fi scrise în formă matriceală:
11 12 1 11 1
21 22 2 22 2
1 2
j N S
j N S
N N Nj NN SN N
k k k k f u
k k k k f u
k k k k f u
=
…
(5.2)
sau, în formă compactă:
[ ] [ ] S f k u= (5.3)
unde [k ] este matricea de rigiditate a structurii, care este o matrice simetrică (k ij = k ji).
(a)
(b)
Figura 5.3. Componenta de rigiditate pentru un cadru plan (a), coeficienii de rigiditate pentru u j = 1 (b),Chopra, 2001.
5.1.2. For ele de amortizare
În mod similar cu matricea de rigiditate poate fi determinată şi matricea de amortizare. Astfel, dacă seblochează toate gradele de libertate şi se impune o viteză unitară pe direcia gradului de libertate j, vor figenerate fore pe direcia gradelor de libertate considerate. Coeficientul de amortizare cij este fora pe direciagradului de libertate i datorată unei viteze unitare de-a lungul gradului de libertate j.
Cunoscând coeficienii de amortizare cij, forele nodale f Di pe direcia gradului de libertate i, asociate vitezei
ju , j = 1, 2, …, N se obin folosind principiul suprapunerii efectelor (vezi Figura 5.4):
1 1 2 2 ... ... Di i i ij j iN N f c u c u c u c u= + + + + + (5.4)
Ecuaiile corespunzătoare i = 1, 2, …, N pot fi scrise în formă matriceală:
11 12 1 11 1
21 22 2 22 2
1 2
j N D
j N D
N N Nj NN DN N
c c c c f u
c c c c f u
c c c c f u
=
…
(5.5)
sau, în formă compactă:[ ] [ ] D f c u= (5.6)

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 69/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
68
unde [c] este matricea de amortizare a structurii.
Figura 5.4. Componenta de amortizare pentru un cadru plan (Chopra, 2001).
5.1.3. For ele de iner ie
Dacă se blochează toate gradele de libertate şi se impune o acceleraie unitară pe direcia gradului de libertate j, conform principiului lui D'Alambert vor fi generate fore de inerie pe direcia gradelor de libertateconsiderate. Coeficientul masei mij este fora pe direcia gradului de libertate i datorată unei acceleraiiunitare de-a lungul gradului de libertate j. Spre exemplu, în Figura 5.5b sunt prezentate forele mi1 (i = 1, 2, …, 8) necesare păstrării echilibrului în cazul impunerii unei acceleraii unitare 1 1u = .
Cunoscând coeficienii maselor mij, forele nodale f Ii pe direcia gradului de libertate i, asociate acceleraiei
ju , j = 1, 2, …, N sunt obinute folosind principiul suprapunerii efectelor (vezi Figura 5.5a):
1 1 2 2 ... ... Ii i i ij j iN N
f m u m u m u m u= + + + + + (5.7)
Ecuaiile corespunzătoare i = 1, 2, …, N pot fi scrise în formă matriceală:
11 12 1 11 1
21 22 2 22 2
1 2
j N I
j N I
N N Nj NN IN N
m m m m f u
m m m m f u
m m m m f u
=
…
(5.8)
sau, în formă compactă:
[ ] [ ] I f m u= (5.9)
unde [m] este matricea masei structurii, care este o matrice simetrică (mij = m ji).
(a) (b)
Figura 5.5. Componenta de masă pentru un cadru plan (a), coeficienii de masă pentru 1 1u = (b),
Chopra, 2001.
Masa unei structuri este distribuită în întreaga structură (vezi Figura 5.6a). Totuşi, în cele mai multe cazuri,masa poate fi considerată concentrată în nodurile structurii. Procedura constă în concentrarea masei

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 70/149
5. Sisteme cu mai multe grade de libertate dinamică
69
elementelor la fiecare capăt al acestuia pe baza principiilor staticii, urmată de însumarea masei elementelorcare concură în nodurile corespunzătoare (vezi Figura 5.6b şi c). În general, componentele de rotire alemaselor au o influenă minoră asupra răspunsului dinamic al structurilor şi sunt neglijate. În cazul unui cadruplan, masele obinute în acest mod vor avea componente pe cele două direcii de translaie ( x, y).Considerând barele structurii infinit rigide axial (ipoteză folosită şi la stabilirea matricei de rigiditate), maselestructurii pot fi considerate concentrate la nivelul planşeelor structurii, acionând doar pe direcia x (Figura5.6d). Astfel, pentru exemplu din Figura 5.5, masa asociat
ăunei accelera
ii unitare
11u = este m
11 = m
1
(unde m1 = ma + mb + mc, vezi Figura 5.6c), iar mi1 = 0 pentru i = 2, 3, …, 8.
bc
mb mamb mc
d e m f
m1
2
(a) (b) (c) (d)Figura 5.6. Concentrarea maselor în noduri (a - c) şi la nivelul planşeelor (d) pentru un cadru plan.
În general, pentru mase concentrate în noduri, matricea maselor este diagonală:
0 0ij jj j
m pentru i j şi m m sau= ≠ = (5.10)
unde m j este masa asociată gradului de liberate j atunci când acesta reprezintă o translaie, şi m j = 0 pentru ungrad de libertate care reprezintă o rotire de nod.
La structurile multietajate spaiale, numărul elementelor din matricea maselor poate fi redus considerândefectul de şaibă rigidă a planşeelor. Astfel, planşeele care posedă o rigiditate foarte mare în planul lor (cumar fi planşeele de beton armat) sunt considerate de o rigiditate infinită în planul lor dar flexibile în afaraplanului. Datorită mişcării de corp rigid, deplasările orizontale (după x şi y) ale nodurilor de la nivelul unuiplanşeu nu sunt independente, şi pot fi reduse la doar trei grade de libertate definite în centrul de greutate alfiecărui planşeu: două deplasări orizontale şi o rotire faă de axa verticală (vezi Figura 5.7a). Atunci cândplanşeul nu poate fi considerat rigid (de exemplu în cazul planşeelor din lemn), masele trebuie atribuitefiecărui nod în parte, proporional cu aria aferentă nodului respectiv (vezi Figura 5.7b).
(a) (b)
Figura 5.7. Grade de libertate pentru cadre spaiale: planşee rigide în planul lor (a); aria aferentă pentrudistribuirea masei în noduri la planşee flexibile în planul lor (b), Chopra, 2001.
5.1.4. Ecua ia de mi şcare: for e dinamice
Răspunsul dinamic al unui sistem cu mai multe grade de libertate dinamică (MGLD) acionat de foredinamice este alcătuit din deplasările ( ) ju t , vitezele ( ) ju t şi acceleraiile ( ) ju t , j = 1…N. Forele dinamice
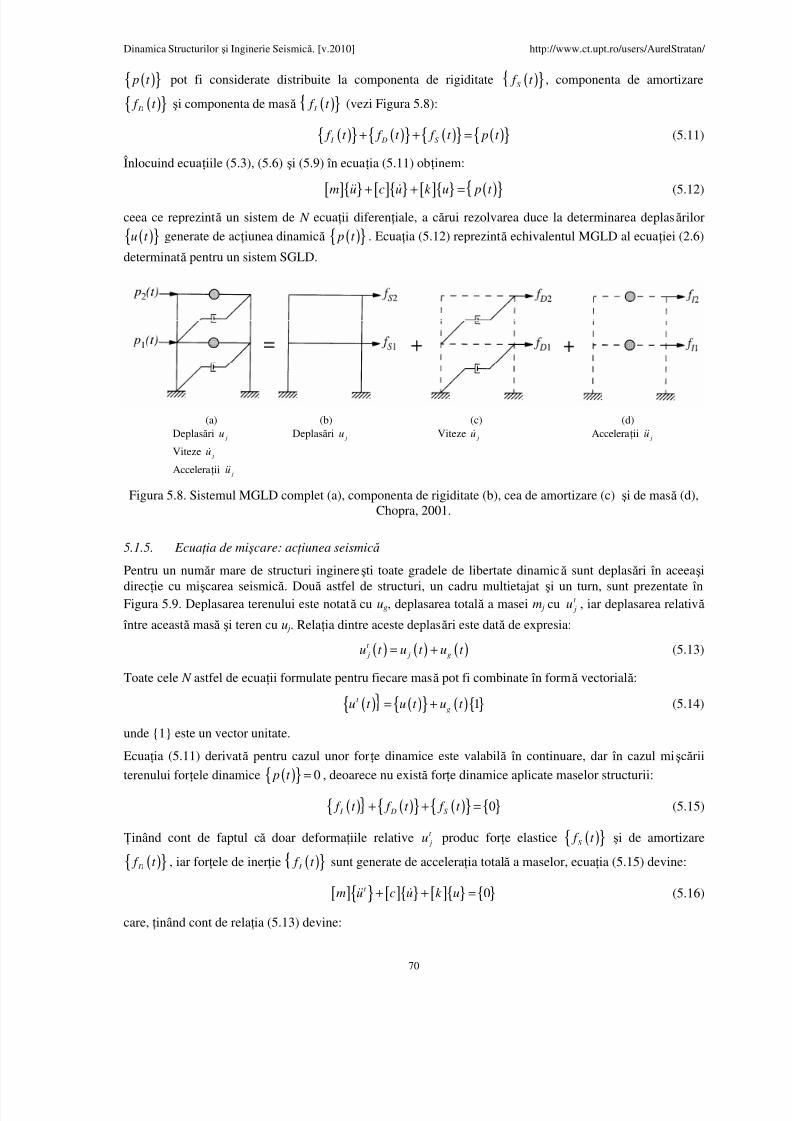
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 71/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
70
( ) p t pot fi considerate distribuite la componenta de rigiditate ( ) S f t , componenta de amortizare
( ) D f t şi componenta de masă ( ) I
f t (vezi Figura 5.8):
( ) ( ) ( ) ( ) I D S f t f t f t p t + + = (5.11)
Înlocuind ecuaiile (5.3), (5.6) şi (5.9) în ecuaia (5.11) obinem:
[ ] [ ] [ ] ( ) m u c u k u p t + + = (5.12)
ceea ce reprezintă un sistem de N ecuaii difereniale, a cărui rezolvarea duce la determinarea deplasărilor
( ) u t generate de aciunea dinamică ( ) p t . Ecuaia (5.12) reprezintă echivalentul MGLD al ecuaiei (2.6)
determinată pentru un sistem SGLD.
(a)Deplasări
ju
Viteze j
u
Acceleraii j
u
(b)Deplasări
ju
(c)Viteze
ju
(d)Acceleraii
ju
Figura 5.8. Sistemul MGLD complet (a), componenta de rigiditate (b), cea de amortizare (c) şi de masă (d),Chopra, 2001.
5.1.5. Ecua ia de mi şcare: ac iunea seismică
Pentru un număr mare de structuri inginereşti toate gradele de libertate dinamică sunt deplasări în aceeaşidirecie cu mişcarea seismică. Două astfel de structuri, un cadru multietajat şi un turn, sunt prezentate înFigura 5.9. Deplasarea terenului este notată cu ug, deplasarea totală a masei m j cu t
ju , iar deplasarea relativă
între această masă şi teren cu u j. Relaia dintre aceste deplasări este dată de expresia:
( ) ( ) ( )t
j j gu t u t u t = + (5.13)
Toate cele N astfel de ecuaii formulate pentru fiecare masă pot fi combinate în formă vectorială:
( ) ( ) ( ) 1t
gu t u t u t = + (5.14)
unde 1 este un vector unitate.
Ecuaia (5.11) derivată pentru cazul unor fore dinamice este valabilă în continuare, dar în cazul mişcării
terenului forele dinamice ( ) 0 p t = , deoarece nu există fore dinamice aplicate maselor structurii:
( ) ( ) ( ) 0 I D S f t f t f t + + = (5.15)
inând cont de faptul că doar deformaiile relative t
ju produc fore elastice ( ) S f t şi de amortizare
( ) D f t , iar forele de inerie ( ) I
f t sunt generate de acceleraia totală a maselor, ecuaia (5.15) devine:
[ ] [ ] [ ] 0t m u c u k u+ + = (5.16)
care, inând cont de relaia (5.13) devine:
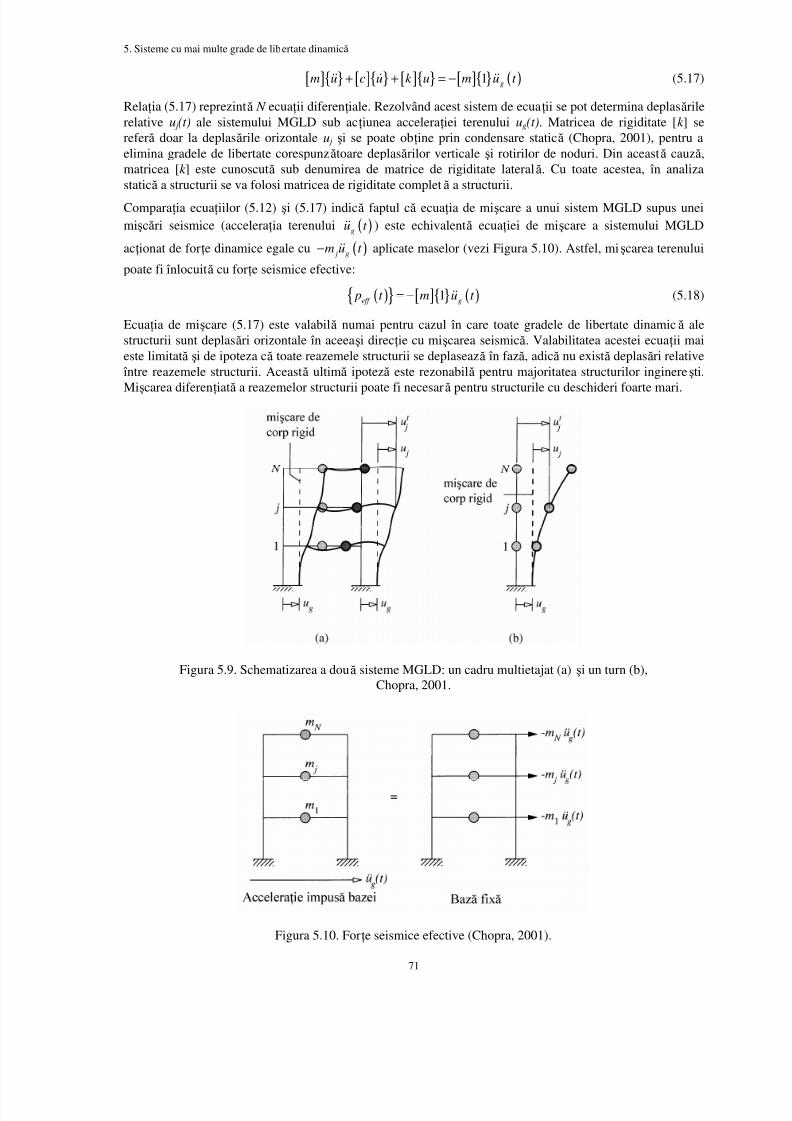
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 72/149
5. Sisteme cu mai multe grade de libertate dinamică
71
[ ] [ ] [ ] [ ] ( )1 gm u c u k u m u t + + = − (5.17)
Relaia (5.17) reprezintă N ecuaii difereniale. Rezolvând acest sistem de ecuaii se pot determina deplasărilerelative u j(t) ale sistemului MGLD sub aciunea acceleraiei terenului ug(t). Matricea de rigiditate [k ] sereferă doar la deplasările orizontale u j şi se poate obine prin condensare statică (Chopra, 2001), pentru aelimina gradele de libertate corespunzătoare deplasărilor verticale şi rotirilor de noduri. Din această cauză,matricea [k ] este cunoscută sub denumirea de matrice de rigiditate laterală. Cu toate acestea, în analizastatică a structurii se va folosi matricea de rigiditate completă a structurii.
Comparaia ecuaiilor (5.12) şi (5.17) indică faptul că ecuaia de mişcare a unui sistem MGLD supus uneimişcări seismice (acceleraia terenului ( )gu t ) este echivalentă ecuaiei de mişcare a sistemului MGLD
acionat de fore dinamice egale cu ( ) j gm u t − aplicate maselor (vezi Figura 5.10). Astfel, mişcarea terenului
poate fi înlocuită cu fore seismice efective:
( ) [ ] ( )1eff g
p t m u t = − (5.18)
Ecuaia de mişcare (5.17) este valabilă numai pentru cazul în care toate gradele de libertate dinamică alestructurii sunt deplasări orizontale în aceeaşi direcie cu mişcarea seismică. Valabilitatea acestei ecuaii mai
este limitată şi de ipoteza că toate reazemele structurii se deplasează în fază, adică nu există deplasări relative între reazemele structurii. Această ultimă ipoteză este rezonabilă pentru majoritatea structurilor inginereşti.Mişcarea difereniată a reazemelor structurii poate fi necesară pentru structurile cu deschideri foarte mari.
Figura 5.9. Schematizarea a două sisteme MGLD: un cadru multietajat (a) şi un turn (b),Chopra, 2001.
Figura 5.10. Fore seismice efective (Chopra, 2001).
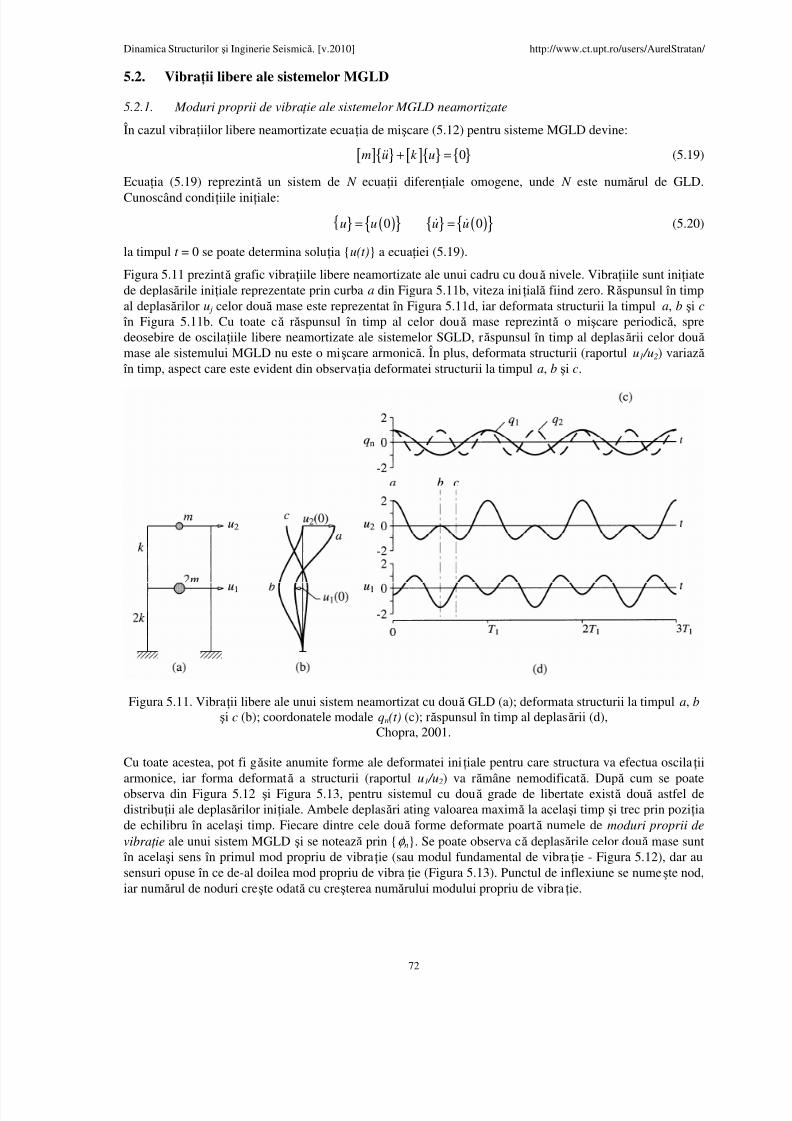
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 73/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
72
5.2. Vibraii libere ale sistemelor MGLD
5.2.1. Moduri proprii de vibra ie ale sistemelor MGLD neamortizate
În cazul vibraiilor libere neamortizate ecuaia de mişcare (5.12) pentru sisteme MGLD devine:
[ ] [ ] 0m u k u+ = (5.19)
Ecuaia (5.19) reprezintă un sistem de N ecuaii difereniale omogene, unde N este numărul de GLD.Cunoscând condiiile iniiale:
( ) ( ) 0 0u u u u= = (5.20)
la timpul t = 0 se poate determina soluia u(t) a ecuaiei (5.19).
Figura 5.11 prezintă grafic vibraiile libere neamortizate ale unui cadru cu două nivele. Vibraiile sunt iniiatede deplasările iniiale reprezentate prin curba a din Figura 5.11b, viteza iniială fiind zero. Răspunsul în timpal deplasărilor u j celor două mase este reprezentat în Figura 5.11d, iar deformata structurii la timpul a, b şi c
în Figura 5.11b. Cu toate că răspunsul în timp al celor două mase reprezintă o mişcare periodică, spredeosebire de oscilaiile libere neamortizate ale sistemelor SGLD, răspunsul în timp al deplasării celor două
mase ale sistemului MGLD nu este o mişcare armonică. În plus, deformata structurii (raportul u1 /u2) variază în timp, aspect care este evident din observaia deformatei structurii la timpul a, b şi c.
Figura 5.11. Vibraii libere ale unui sistem neamortizat cu două GLD (a); deformata structurii la timpul a, b şi c (b); coordonatele modale qn(t) (c); răspunsul în timp al deplasării (d),
Chopra, 2001.
Cu toate acestea, pot fi găsite anumite forme ale deformatei iniiale pentru care structura va efectua oscilaiiarmonice, iar forma deformată a structurii (raportul u1 /u2) va rămâne nemodificată. După cum se poateobserva din Figura 5.12 şi Figura 5.13, pentru sistemul cu două grade de libertate există două astfel dedistribuii ale deplasărilor iniiale. Ambele deplasări ating valoarea maximă la acelaşi timp şi trec prin poziiade echilibru în acelaşi timp. Fiecare dintre cele două forme deformate poartă numele de moduri proprii de
vibra ie ale unui sistem MGLD şi se notează prin φ n. Se poate observa că deplasările celor două mase sunt în acelaşi sens în primul mod propriu de vibraie (sau modul fundamental de vibraie - Figura 5.12), dar ausensuri opuse în ce de-al doilea mod propriu de vibra ie (Figura 5.13). Punctul de inflexiune se numeşte nod,
iar numărul de noduri creşte odată cu creşterea numărului modului propriu de vibraie.
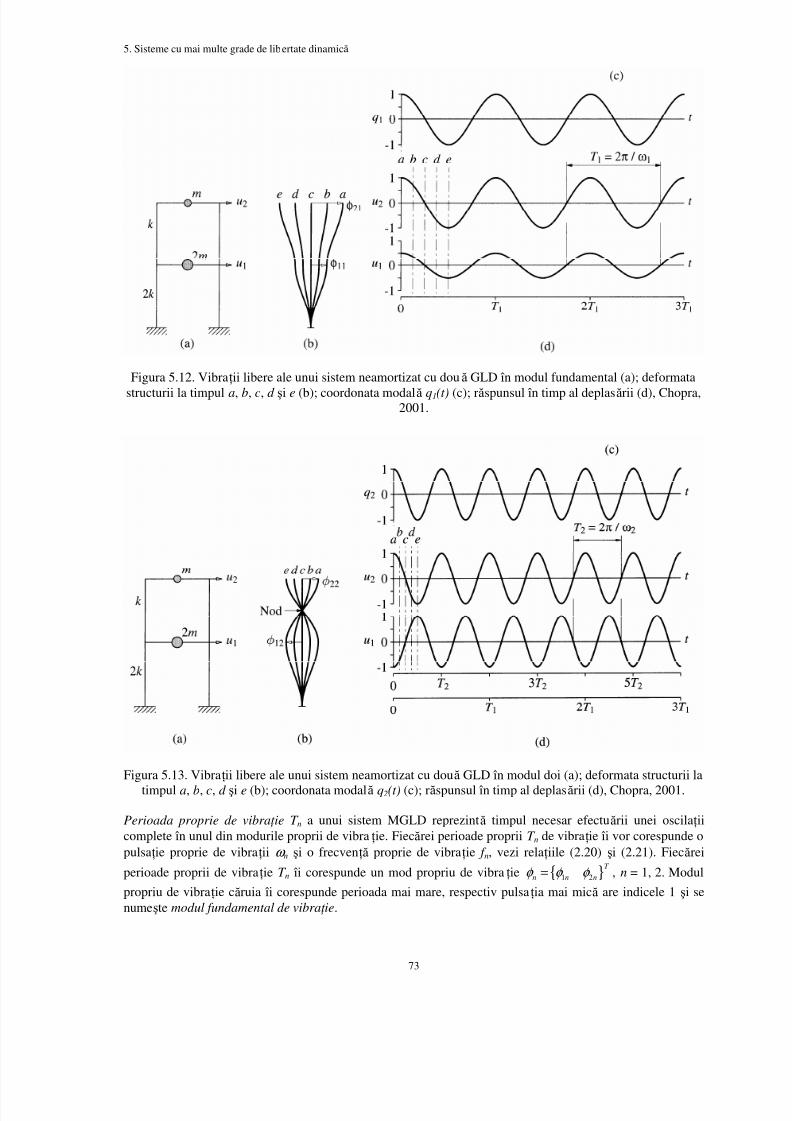
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 74/149
5. Sisteme cu mai multe grade de libertate dinamică
73
Figura 5.12. Vibraii libere ale unui sistem neamortizat cu două GLD în modul fundamental (a); deformatastructurii la timpul a, b, c, d şi e (b); coordonata modală q1(t) (c); răspunsul în timp al deplasării (d), Chopra,
2001.
Figura 5.13. Vibraii libere ale unui sistem neamortizat cu două GLD în modul doi (a); deformata structurii latimpul a, b, c, d şi e (b); coordonata modală q2(t) (c); răspunsul în timp al deplasării (d), Chopra, 2001.
Perioada proprie de vibra ie T n a unui sistem MGLD reprezintă timpul necesar efectuării unei oscilaiicomplete în unul din modurile proprii de vibraie. Fiecărei perioade proprii T n de vibraie îi vor corespunde opulsaie proprie de vibraii ω n şi o frecvenă proprie de vibraie f n, vezi relaiile (2.20) şi (2.21). Fiecărei
perioade proprii de vibraie T n îi corespunde un mod propriu de vibraie 1 2
T
n n nφ φ φ = , n = 1, 2. Modul
propriu de vibraie căruia îi corespunde perioada mai mare, respectiv pulsaia mai mică are indicele 1 şi senumeşte modul fundamental de vibra ie.

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 75/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
74
Reprezentarea grafică a deplasărilor înregistrate de un sistem MGLD care efectuează nişte oscilaii libereneamortizate în modul propriu de vibraie n (vezi Figura 5.12 şi Figura 5.13) poate fi exprimată matematicprin:
( ) ( ) n nnu t q t φ = (5.21)
Deformata φ n nu variază în timp, iar variaia în timp a deplasărilor este dată de o funcie armonică:
( ) cos sinn n n n n
q t A t B t ω ω = + (5.22)
unde An şi Bn sunt constante de integrare care pot fi determinate cunoscând condiiile iniiale.
Combinând ecuaiile (5.21) şi (5.22) obinem:
( ) ( )cos sinn n n nnn
u t A t B t φ ω ω = + (5.23)
unde ω n şi φ n sunt necunoscute. Înlocuind relaia (5.23) în ecuaia de mişcare (5.19) obinem:
[ ] [ ] ( ) 2 0n nn n
m k q t ω φ φ − + = (5.24)
Această ecuaie are două soluii. Prima soluie corespunde qn(t) = 0 ceea ce implică ( ) 0nu t = , adică sistemul nu oscilează (soluia banală). Cea de-a două soluie se obine pentru:
[ ] [ ] 2nn n
k mφ ω φ = (5.25)
sau
[ ] [ ]( ) 2 0n n
k mω φ − = (5.26)
care se numeşte problemă de valori proprii şi conduce la determinarea scalarilor ω n şi a vectorilor φ n.Ecuaia (5.26) are soluii nenule pentru:
[ ] [ ]( )
2det 0n
k mω − = (5.27)
Prin dezvoltarea determinantului se obine un polinom de ordinul N funcie de ω n2 cunoscut sub numele de
ecua ie caracteristică. Această ecuaie are N rădăcini reale şi pozitive ale ω n2, care se numesc valori proprii.
Odată cunoscute valorile proprii ω n2, se pot determina cei N vectori proprii corespunzători φ n, cunoscui
sub denumirea de moduri proprii. Rezolvând problema de valori proprii nu se obin amplitudinile absoluteale vectorilor φ n, ci doar valori relative ale celor N deplasări φ jn ( j = 1… N ), adică doar forma deformateimodale.
Cele N valori proprii şi cele N moduri proprii pot fi reprezentate compact în formă vectorială. Astfel, modulpropriu φ n corespunzător pulsaiei ω n are elementele φ jn ( j = 1… N ), unde j reprezintă gradele de libertate.Cele N moduri proprii pot fi reprezentate matriceal sub forma:
[ ] 11 1
1
1
N
n
N NN
φ φ
φ φ
φ φ
Φ = =
(5.28)
Matricea [Φ] se numeşte matricea modală a problemei de valori proprii. Cele N valori proprii ω n2 pot fi
asamblate într-o matrice diagonală [Ω2], care se numeşte matricea spectrală a problemei de valori proprii:
21
2
2 N
ω
ω
Ω =
(5.29)
Folosind notaiile (5.28) şi (5.29), ecuaia (5.25) se poate scrie în formă compactă sub forma:
[ ][ ] [ ][ ] 2k m Φ = Φ Ω (5.30)

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 76/149
5. Sisteme cu mai multe grade de libertate dinamică
75
5.2.2. Ortogonalitatea modurilor proprii
Modul propriu n satisface ecuaia (5.25). Înmulind această relaie la stânga cu T
r φ (pentru r ≠ n) obinem:
[ ] [ ] 2T T
nr n r nk mφ φ ω φ φ = (5.31)
Similar, modul propriu r satisface ecuaia (5.25). Înmulind relaia corespunzătoare modului r la stânga cu
T
nφ obinem:
[ ] [ ] 2T T
r n r n r k mφ φ ω φ φ = (5.32)
Transpusa unei matrice simetrice este egală cu ea însăşi, iar transpusa produsului a două matrice este egală cu produsul în ordine inversă a matricelor transpuse. Aplicând această proprietate matricelor simetrice demasă şi rigiditate, şi calculând transpusa relaiei (5.31) obinem:
[ ] [ ] 2T T
nn r n r k mφ φ ω φ φ = (5.33)
Făcând diferena dintre ecuaiile (5.33) şi (5.32), obinem:
( ) [ ] 2 2 0T
n r n r mω ω φ φ − = (5.34)
Astfel, pentru ω n2 ≠ ω r
2, care pentru sisteme cu pulsaii pozitive implică ω n ≠ ω r conduce la expresia:
[ ] 0T
n r mφ φ = ω n ≠ ω r (5.35)
Înlocuind ecuaia (5.35) în relaia (5.32) rezultă:
[ ] 0T
n r k φ φ = ω n ≠ ω r (5.36)
Relaiile (5.35) şi (5.36) demonstrează proprietatea de ortogonalitate a modurilor proprii de vibraie.
Ortogonalitatea modurilor proprii de vibraie implică faptul că următoarele matrice sunt diagonale:
[ ] [ ] [ ][ ] [ ] [ ] [ ][ ]T T
K k M m≡ Φ Φ ≡ Φ Φ (5.37)
unde elementele diagonale sunt:
[ ] [ ] T T
n nn n n nK k M mφ φ φ φ = = (5.38)
Deoarece matricele [m] şi [k ] sunt pozitive, elementele de pe diagonalele matricelor [ M ] şi [K ] sunt deasemenea pozitive. Elementele celor două matrice se raportează prin:
2n n n
K M ω = (5.39)
Această relaie poate fi demonstrată înlocuind expresia (5.25) în definiia (5.38)a.
5.2.3. Normalizarea modurilor
Rezolvarea problemei de valori proprii (5.25) duce la determinarea vectorilor proprii, rezultatul reprezentând însă doar valorile relative ale elementelor acestor vectori. Orice alt vector proporional cu φ n va satisfaceecuaia (5.25). Pentru a standardiza modurile proprii de vibraie, acestea se normalizează. Uneorinormalizarea poate consta în egalarea valorii maxime a unui mod propriu cu unitatea. Alteori poate fiavantajoasă egalarea valorii corespunzătoare unui anume GLD (de exemplu deplasarea laterală la ultimulnivel al unei structuri multietajate) cu unitatea. În aplicaiile teoretice şi aplicaiile în programe de calcul esteuzuală normalizarea modurilor proprii astfel ca M n să aibă valori unitare:
[ ] [ ] [ ][ ] [ ]1T T
n n n M m m I φ φ = = Φ Φ = (5.40)
unde [ I ] este matricea unitate. Ecuaia (5.40) indică faptul că modurile proprii obinute în acest mod sunt nudoar ortogonale, ci şi normalizate faă de matricea [m]. Astfel de moduri proprii se numesc ortonormale. Înacest caz relaiile (5.38)a şi (5.37)a devin:

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 77/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
76
[ ] [ ] [ ] [ ][ ]2 2 2T T
n n n nn nK k M K k φ φ ω ω = = = = Φ Φ = Ω (5.41)
5.2.4. Dezvoltarea modală a deplasărilor
Orice set de N vectori independeni poate fi folosit pentru reprezentarea unui alt vector de ordinul N .Modurile proprii pot fi folosite pe postul unor astfel de vectori independen i. Dezvoltarea modală a unui
vector arbitrar u este de forma:
[ ] 1
N
r r r
u q qφ =
= = Φ∑ (5.42)
unde qr sunt valori scalare denumite coordonate modale, iar 1 2
T
nq q q q= . Atunci când se cunosc
modurile proprii φ r , pentru un vector u dat, se pot determina coordonatele modale qr multiplicând
ambele pări ale ecuaiei (5.42) cu [ ]T
nmφ :
[ ] [ ] 1
N T T
r n n r r
m u m qφ φ φ =
= ∑ (5.43)
Ca urmare a proprietăii de ortogonalitate (5.35), toi termenii sumei sunt egali cu zero, cu excepia celorcorespunzători r = n. Astfel:
[ ] [ ] T T
nn n nm u m qφ φ φ = (5.44)
Ambele produse fiind valori scalare, se poate scrie:
[ ]
[ ]
[ ] T T
n nn T
nn n
m u m uq
M m
φ φ
φ φ = = (5.45)
5.2.5. Solu ia ecua iei de mi şcare
Răspunsul dinamic al unui sistem neamortizat care efectuează oscilaii libere se obine rezolvând ecuaia demişcare (5.19) cunoscând condiiile iniiale (5.20). S-a arătat că rezolvarea ecuaiei de mişcare a condus laproblema de valori proprii (5.25). Presupunând această problemă rezolvată şi cunoscând pulsaiile şi vectoriiproprii, soluia generală a ecuaiei de mişcare (5.19) se poate determina prin suprapunerea răspunsuluiindividual în fiecare mod propriu dat de ecuaia (5.23):
( ) ( )1
cos sin N
n n n nnn
u t A t B t φ ω ω =
= +∑ (5.46)
unde An şi Bn sunt 2 N constante de integrare. Pentru determinarea acestora este nevoie de expresia vectoruluivitezelor:
( ) ( )1 sin cos
N
n n n n nnn
u t A t B t φ ω ω ω =
= − +∑ (5.47)
Pentru t = 0 ecuaiile (5.46) şi (5.47) devin:
( ) ( ) 1 1
0 0 N N
n n nn nn n
u A u Bφ φ ω = =
= =∑ ∑ (5.48)
Cunoscând deplasările şi vitezele iniiale ( ) 0u şi ( ) 0u , fiecare din ecuaiile (5.48) reprezintă un sistem
de N ecuaii algebrice liniare cu necunoscutele An, respectiv Bn. Însă rezolvarea simultană a acestor ecuaii nu
este necesară, deoarece acestea pot fi interpretate ca şi o dezvoltare modală a vectorilor ( ) 0u şi ( ) 0u .
Folosind ecuaia (5.42), se poate scrie:
( ) ( ) ( ) ( )1 1
0 0 0 0 N N
n nn nn n
u q u qφ φ = =
= =∑ ∑ (5.49)

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 78/149
5. Sisteme cu mai multe grade de libertate dinamică
77
unde, analogic relaiei (5.45), coordonatele modale ( )0n
q şi ( )0n
q sunt date de:
( ) [ ] ( )
( ) [ ] ( ) 0 0
0 0
T T
n n
n n
n n
m u m uq q
M M
φ φ = =
(5.50)
Ecuaiile (5.48) şi (5.49) sunt echivalente, ceea ce implică ( )0n n
A q= şi ( )0n n n
B q ω = . Înlocuind aceste
expresii în relaia (5.46) obinem:
( ) ( )( )
1
00 cos sin
N n
n n nnn n
qu t q t t φ ω ω
ω =
= +
∑
(5.51)
sau, alternativ:
( ) ( )1
N
nnn
u t q t φ =
= ∑ (5.52)
unde
( ) ( )( )0
0 cos sinn
n n n n
n
q
q t q t t ω ω ω = +
(5.53)
reprezintă variaia în timp a coordonatelor modale, care sunt similare expresiei oscilaiilor libereneamortizate ale unui sistem SGLD. Ecuaia (5.51) reprezintă soluia ecuaiei de mişcare în cazul oscilaiilorlibere neamortizate ale unui sistem MGLD. Aceasta constă din vectorul deplasărilor u care variază în timpşi se datorează deplasărilor iniiale ( )0u şi vitezelor iniiale ( )0u . Dacă se cunosc pulsaiile proprii ω n şi
vectorii proprii φ n, partea dreaptă a relaiei (5.51) este cunoscută, cu expresiile ( )0n
q şi ( )0n
q date de
(5.50).

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 79/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
78
5.2.6. Vibra ii libere amortizate ale sistemelor MGLD
În cazul vibraiilor libere amortizate ecuaia de mişcare (5.12) pentru sisteme MGLD devine:
[ ] [ ] [ ] 0m u c u k u+ + = (5.54)
Cunoscând condiiile iniiale:
( ) ( ) 0 0u u u u= = (5.55)
la timpul t = 0 se poate determina soluia ecuaiei (5.54) u(t).
Folosind ecuaia (5.42) pentru a dezvolta deplasările u prin modurile proprii ale sistemului neamortizat şi înlocuind expresia acestor deplasări în ecuaia (5.54) obinem:
[ ] [ ] [ ][ ] [ ][ ] 0m q c q k qΦ + Φ + Φ = (5.56)
Înmulind la stânga cu [Φ]T obinem:
[ ] [ ] [ ] 0 M q C q K q+ + = (5.57)
unde matricele [ M ] şi [K ] sunt definite de relaiile (5.37), iar matricea [C ] este definită în mod similar:
[ ] [ ] [ ][ ]T
C c= Φ Φ (5.58)
În general, matricea [C ] poate fi sau poate să nu fie o matrice diagonală. În primul caz modurile proprii alesistemului amortizat sunt identice cu modurile proprii ale sistemului neamortizat, iar ecuaia de mişcarepoate fi rezolvată folosind metode clasice de analiză modală. De aceea, aceste sisteme sunt denumite cuamortizare clasică. Majoritatea structurilor inginereşti pot fi încadrate în această categorie. Astfel, în cele ceurmează vor fi tratate doar sisteme MGLD cu amortizare clasică.
În Figura 5.14 este prezentat un sistem cu două grade de libertate dinamică care efectuează oscilaii libereamortizate generate de deplasările iniiale u(0) proporionale cu primul mod propriu al sistemului
neamortizat corespunzător. În Figura 5.15 sunt prezentate rezultate similare pentru acelaşi sistem, oscilaiilefiind generate de impunerea unor deplasări iniiale u(0) proporionale cu cel de-al doilea mod propriu alsistemului neamortizat corespunzător. Rezultatele permit următoarele observaii: deformata nu se modifică în timpul vibraiilor libere amortizate, la fel ca şi în cazul vibraiilor libere
neamortizate (vezi Figura 5.12 şi Figura 5.13). Astfel, modurile proprii φ n ale sistemului amortizat suntmoduri proprii de vibraie şi pentru sistemul amortizat
deplasările celor două mase sunt similare cu cele ale sistemului neamortizat, dar amplitudinea oscilaiilorscade cu fiecare ciclu din cauza amortizării
răspunsul fiecărei mase este o mişcare armonică simplă, similară cu cea a unui sistem SGLD amortizat.
Pentru fiecare mod propriu de vibraie n, ecuaia de mişcare în coordonate modale este:
0n n n n n n
M q C q K q+ + = (5.59)
unde scalarii M n şi K n sunt definii de (5.38), iar
[ ] T
n n nC cφ φ = (5.60)
Împărind ecuaia (5.59) la M n obinem:
22 0n n n n n n
q q qξ ω ω + + = (5.61)
unde s-a notat:
2n
n
n n
C
M ξ
ω = (5.62)
Ecuaia (5.61) are aceeaşi formă ca şi ecuaia de mişcare (2.26) a unui sistem SGLD amortizat, a cărei soluieeste dată de expresia (2.29). Adaptând acest rezultat, soluia ecuaiei (5.61) este dată de:
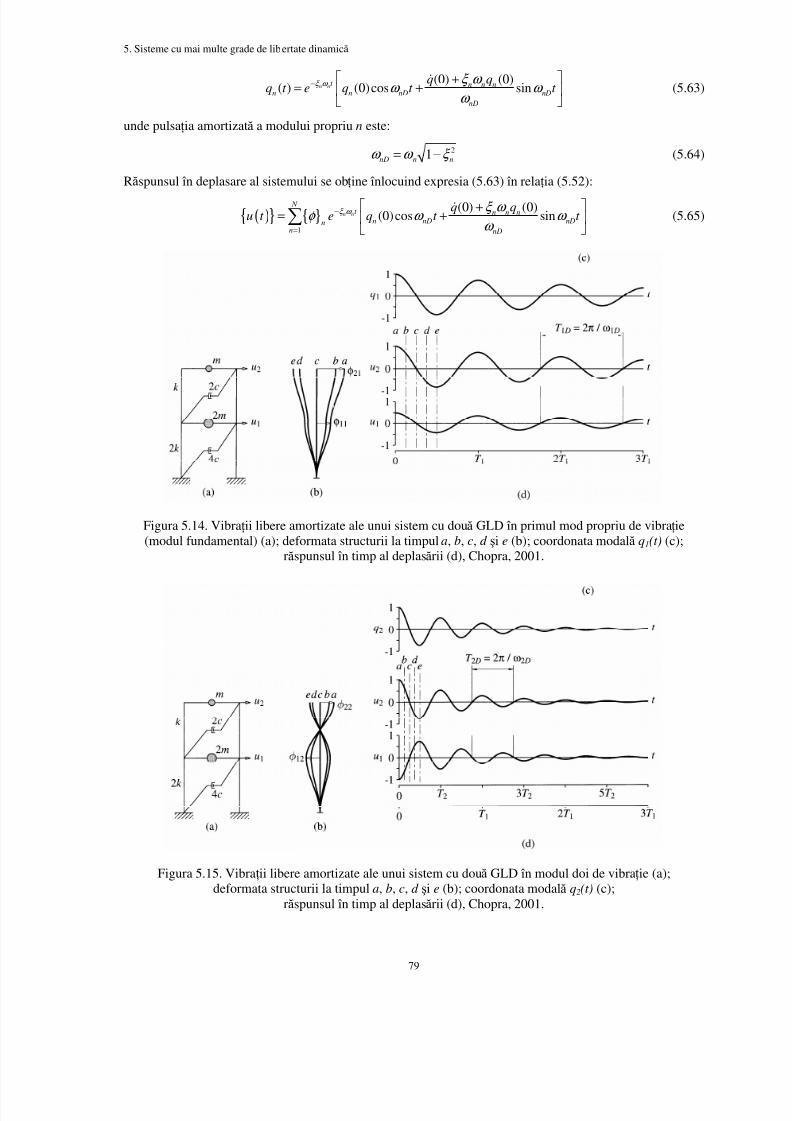
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 80/149
5. Sisteme cu mai multe grade de libertate dinamică
79
(0) (0)( ) (0)cos sinn nt n n n
n n nD nD
nD
q qq t e q t t
ξ ω ξ ω ω ω
ω −
+= +
(5.63)
unde pulsaia amortizată a modului propriu n este:
21nD n nω ω ξ = − (5.64)
Răspunsul în deplasare al sistemului se obine înlocuind expresia (5.63) în relaia (5.52):
( ) 1
(0) (0)(0)cos sinn n
N t n n n
n nD nDnn nD
q qu t e q t t
ξ ω ξ ω φ ω ω
ω −
=
+= +
∑
(5.65)
Figura 5.14. Vibraii libere amortizate ale unui sistem cu două GLD în primul mod propriu de vibraie(modul fundamental) (a); deformata structurii la timpul a, b, c, d şi e (b); coordonata modală q1(t) (c);
răspunsul în timp al deplasării (d), Chopra, 2001.
Figura 5.15. Vibraii libere amortizate ale unui sistem cu două GLD în modul doi de vibraie (a);
deformata structurii la timpul a, b, c, d şi e (b); coordonata modală q2(t) (c);răspunsul în timp al deplasării (d), Chopra, 2001.

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 81/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
80
Această expresie reprezintă soluia ecuaiei de mişcare pentru un sistem MGLD amortizat. Pentru a rezolvaecuaia de mişcare a unui sistem MGLD amortizat sunt necesare cunoaşterea pulsaiilor ω n şi a modurilorproprii φ n ale sistemului neamortizat, precum şi a fraciunilor din amortizarea critică ξ n, iar expresiile
( )0nq şi ( )0n
q fiind date de (5.50).
Amortizarea afectează pulsaiile şi perioadele proprii de vibraie a unui sistem MGLD conform ecuaiei(5.64), similar unui sistem SGLD. De aceea, efectul amortizării asupra valorii pulsaiilor şi perioadelorproprii unui sistem MGLD este neglijabil pentru fraciuni ale amortizării critice ξ n < 20%.
5.3. Răspunsul dinamic al sistemelor MGLD
5.3.1. Analiza modală
Ecuaia de mişcare a unui sistem MGLD amortizat acionat de fore dinamice este:
[ ] [ ] [ ] ( ) m u c u k u p t + + = (5.66)
După cum s-a menionat în seciunea 5.2.4, vectorul u al deplasărilor unui sistem MGLD poate fi
dezvoltat prin contribuiile modurilor proprii de vibraie:
[ ] 1
N
r r r
u q qφ =
= = Φ∑ (5.67)
Înlocuind ecuaia (5.67) în (5.66) obinem:
[ ] ( ) [ ] ( ) [ ] ( ) ( ) 1 1 1
N N N
r r r r r r r r r
m q t c q t k q t p t φ φ φ = = =
+ + =∑ ∑ ∑ (5.68)
Înmulind fiecare termen al ecuaiei (5.68) la stânga cu T
nφ , obinem:
[ ] ( ) [ ] ( ) [ ] ( ) ( ) 1 1 1
N N N T T T T
r r r n r n r n r nr r r m q t c q t k q t p t φ φ φ φ φ φ φ = = =
+ + =
∑ ∑ ∑
(5.69)
Folosind proprietatea de ortogonalitate a modurilor proprii de vibraie (vezi seciunea 5.2.2), în cazulamortizării clasice (matricea de amortizare [c] simetrică), această ecuaie se reduce la:
( ) ( ) ( ) ( )n n n n n n n M q t C q t K q t P t + + = (5.70)
unde M n, C n şi K n sunt date de relaiile (5.38) şi (5.60). Ecuaia (5.70) este valabilă pentru fiecare modpropriu n = 1, 2, …, N, iar setul de N ecuaii poate fi scrisă în formă matriceală:
[ ][ ] [ ][ ] [ ][ ] ( ) M q C q K q P t + + = (5.71)
Împărind ecuaia (5.70) la M n obinem:
( )22 n
n n n n n n
n
P t q q q
M ξ ω ω + + = (5.72)
unde ξ n este fraciunea din amortizarea critică în modul propriu n, iar ω n este pulsaia proprie de vibraie înmodul n. În ecuaiile (5.70) şi (5.72) mărimile M n, C n, K n şi Pn(t) depind doar de modul propriu n. Astfel,rezolvarea sistemului de N ecuaii difereniale neomogene (5.66) a fost redusă la rezolvarea a N ecuaiidifereniale neomogene (5.72) independente. În plus, folosind ecuaia (5.72), nu este necesară estimareadirectă a matricei de amortizare [c] şi nici a elementelor matricei de amortizare modală [C ]. În schimb,amortizarea se specifică direct prin fraciunea de amortizare critică ξ n pentru fiecare mod propriu de vibraie.
Ecuaia de mişcare (5.72) are aceeaşi formă ca şi ecuaia de mişcare a unui sistem SGLD, astfel încât pot fi
folosite oricare dintre metodele de rezolvare amintite în seciunea 2.3 (rezolvarea directă a ecuaieidifereniale, integrala Duhamel, metode numerice). Soluia ecuaiei de mişcare în modul n este coordonatamodală qn(t). După cum se poate observa din ecuaia (5.67), contribuia modului propriu n la deplasăriletotale u(t) este:

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 82/149
5. Sisteme cu mai multe grade de libertate dinamică
81
( ) ( )nnnu t q t φ = (5.73)
După ce au fost determinate coordonatele modale qn(t) pentru toate modurile proprii de vibraie, deplasăriletotale se pot determina însumând contribuiile individuale. Astfel, vectorul deplasărilor totale este dat derelaia:
( ) ( ) ( )1 1
N N
nnnn nu t u t q t φ = =
= =
∑ ∑ (5.74)
Această metodă de analiză este cunoscută sub denumirea de analiză modală şi este valabilă numai pentrusisteme liniar elastice şi amortizare clasică.
Eforturile interne r(t) în elementele structurii la momentul t pot fi determinate folosind deplasările u(t) prindouă metode. În prima dintre acestea se determină contribuiile r n(t) din modul propriu de vibraie n, folosinddeplasările impuse u(t)n, după care eforturile totale se obin prin însumarea contribuiilor tuturor modurilorproprii:
( ) ( )1
N
n
n
r t r t =
= ∑ (5.75)
În cea de-a doua metodă se determină forele statice echivalente din modul propriu de vibraie n:( ) [ ] ( )
n n f t k u t = . Înlocuind în această expresie ecuaia (5.73) şi folosind expresia (5.25) obinem:
( ) [ ] ( )2n nnn
f t m q t ω φ = (5.76)
Analiza statică a structurii sub efectul acestor fore permite calculul contribuiilor r n(t) din modul propriu devibraie n. Eforturile totale r(t) se determină folosind ecuaia (5.75).
În concluzie, analiza modală a unui sistem MGLD acionat de forele dinamice p(t) poate fi efectuată înurmătoarea ordine:1. Se definesc proprietăile structurale
- matricele masei [m] şi ale rigidităii [k ]- fraciunea din amortizarea critică ξ n
2. Se determină pulsaiile proprii de vibraie ω n şi modurile proprii de vibraie φ n 3. Se calculează răspunsul în fiecare mod propriu urmărind secvena:
- se formulează ecuaia de mişcare (5.72)- se calculează deplasările u(t)n folosind ecuaia (5.73)- se calculează eforturile r n(t) din modul propriu de vibraie n ale eforturilor, folosind una dintremetodele descrise mai sus
4. Se combină răspunsurile modale pentru a obine răspunsul total. Deplasările totale se obin din ecuaia(5.74), iar eforturile toatele din ecuaia (5.75)
În general, doar primele câteva moduri proprii de vibraie contribuie semnificativ la răspunsul total alstructurii. De aceea, paşii de la punctul (3) se efectuează în mod curent doar pentru primele câteva moduriproprii de vibraie.
5.3.2. Analiza r ăspunsului seismic în timp folosind analiza modală
Ecuaia de mişcare a unui sistem MGLD amortizat acionat de mişcarea seismică este dată de:
[ ] [ ] [ ] ( ) eff m u c u k u p t + + = (5.77)
unde
( ) [ ] ( )1eff g
p t m u t = − (5.78)
inând cont de faptul că răspunsul unui sistem MGLD supus mişcării seismice la baza structurii este identiccu răspunsul dinamic al aceluiaşi sistem MGLD acionat de forele efective date de ecuaia (5.78), metoda deanaliză modală descrisă în seciunea 5.3.1 pentru fore dinamice este aplicabilă şi în cazul aciunii seismice.

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 83/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
82
Un exemplu de sistem MGLD este prezentat în Figura 5.16. Gradele de libertate dinamic ă sunt deplasărilelaterale relative u j, j = 1, 2, …, N , unde N reprezintă numărul de nivele, respectiv numărul gradelor delibertate. Matricea maselor [m] este o matrice diagonală cu elementele m jj = m j.
Distribuia în spaiu a forelor efective peff (t) este dată de expresia s = [m]1, care este independentă detimp. Vectorul s poate fi dezvoltat folosind următoarea expresie:
[ ] [ ] 1 1
1
N N
r r r r r
s m s m φ = =
= = = Γ ∑ ∑ (5.79)
Figura 5.16. Gradele de libertate dinamică ale unui cadru multietajat: deplasările laterale(Chopra, 2001).
Înmulind ambele pări ale ecuaiei (5.79) cu T
nφ şi folosind proprietatea de ortogonalitate a modurilor
proprii de vibraie, obinem:
[ ] [ ] 1T T
nn n nm mφ φ φ = Γ (5.80)
de unde:
[ ]
[ ]
[ ] 1
2
1
1 1
N
T T j jn
jn n
n T N
nn n
j jn
j
mm m
M m m
φ φ φ
φ φ φ
=
=
Γ = = =
∑
∑(5.81)
Astfel, se pot scrie următoarele expresii:
[ ] [ ] 2
1 1
1 N N
T T nn n j jn n j jnn n n
j jn
L L m m M m m
M φ φ φ φ φ
= =
Γ = = = = =∑ ∑ (5.82)
unde φ jn reprezintă deplasarea modală pe direcia gradului de libertate j (deplasarea laterală la nivelul j) în
modul propriu de vibraie n.Pe baza relaiei (5.79), contribuia modului propriu de vibraie n la [m]1 este dată de:
[ ] n jn n j jnn ns m s mφ φ = Γ = Γ (5.83)
distribuie care este independentă de modul în care sunt normalizate modurile proprii de vibraie.
În cazul unui sistem MGLD supus unei mişcări seismice, ecuaia (5.72) devine:
( )22n n n n n n n gq q q u t ξ ω ω + + = −Γ (5.84)
Ecuaia de mişcare (4.2) pentru un sistem SGLD supus aciunii seismice poate fi exprimată în următoareaformă:
( )22n n n n n n g D D D u t ξ ω ω + + = − (5.85)

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 84/149
5. Sisteme cu mai multe grade de libertate dinamică
83
unde s-a înlocuit deplasarea u a sistemului SGLD cu notaia Dn pentru a evidenia relaia acesteia cu modulpropriu de vibraie n. În mod similar, ξ a fost înlocuită cu ξ n. Ecuaia de mişcare (5.85) poate fi rezolvată folosind metodele numerice amintite în capitolul 2. Soluia qn(t) a ecuaiei de mişcare a sistemului MGLD înmodul propriu n poate fi obinută observând asemănarea dintre ecuaia (5.84) şi ecuaia de mişcare (5.85) aunui sistem SGLD. Comparând cele două ecuaii:
( ) ( )n n nq t D t = Γ (5.86)
Coeficientul Γ n se numeşte factor de participare modală. Totuşi, acesta nu reprezintă contribuia modului n larăspunsul total al unei mărimi de răspuns. În plus, valoarea factorului de participare modală nu esteindependentă de metoda de normalizare a modurilor proprii de vibraie.
Contribuia modului propriu n la deplasarea totală u(t) este:
( ) ( ) ( )n n nn nnu t q t D t φ φ = = Γ sau ( ) ( ) jn n jn n
u t D t φ = Γ (5.87)
Dintre cele două metode de determinare a eforturilor în elementele structurale descrise în seciunea 5.3.1, deobicei se preferă metoda forelor statice echivalente, fiind mai intuitivă. Forele statice echivalente din modul
propriu n sunt ( ) [ ] ( ) n n
f t k u t = , unde u(t)n sunt determinate din relaia (5.87). Folosind expresiile
(5.25) şi (5.83), forele statice echivalente pot fi exprimate prin:
( ) ( ) [ ] ( )n n nn nn f t s A t m A t φ = = Γ sau ( ) ( ) ( ) jn jn n n j jn n
f t s A t m A t φ = = Γ (5.88)
unde, similar expresiei (4.9),
( ) ( )2n n n
A t D t ω = (5.89)
Relaia (5.88) indică faptul că forele statice echivalente sunt produsul a doi factori: (1) contribu ia sn amodului propriu n la distribuia [m]1 a forelor efective peff (t) şi (2) pseudo-acceleraia înregistrată de unsistem SGLD corespunzător modului propriu n sub aciunea mişcării seismice ( )g
u t .
Contribuia r n(t) din modul propriu n al oricărui răspuns r(t) se determină prin analiza statică a structurii laforele f n(t). Folosind ecuaia (5.88), mărimea r n(t) se poate exprima prin relaia:
( ) ( )st
n n nr t r A t = (5.90)
unde s-a notat prin r nst răspunsul static modal, generat de "forele" sn. Se poate observa că r n
st poate lua atâtvalori pozitive, cât şi negative, şi nu depinde de metoda de normalizare a modurilor proprii.
Răspunsul total se obine însumând contribuiile răspunsului în toate modurile proprii. Astfel, folosindexpresia (5.87), deplasările nodale vor fi:
( ) ( ) ( )1 1
N N
n nnnn n
u t u t D t φ = =
= = Γ ∑ ∑ (5.91)
Folosind ecuaia (5.90), răspunsul total al oricărei mărimi este dat de relaia:
( ) ( ) ( )1 1
N N st
n n n
n n
r t r t r A t = =
= =∑ ∑ (5.92)
Interpretarea analizei modale
Analiza răspunsului seismic în timp folosind metoda de calcul modal începe prin a determina pulsaiileproprii şi modurile proprii de vibraie. Odată acestea cunoscute, pentru fiecare mod propriu se determină componentele modale sn ale distribuiei vectorului forelor [m]1, folosind relaia (5.83). Restulprocedurii unei analize modale este prezentată conceptual în Figura 5.17. Contribuia din modul propriu n arăspunsului dinamic se obine înmulind rezultatele a două analize: (1) o analiză statică a structurii din forele
sn şi (2) o analiză dinamică a unui sistem SGLD corespunzător modului propriu n acionat de mişcareaseismică ( )g
u t . Astfel, analiza modală necesită efectuarea a N analize statice din forele sn, n = 1, 2, …, N
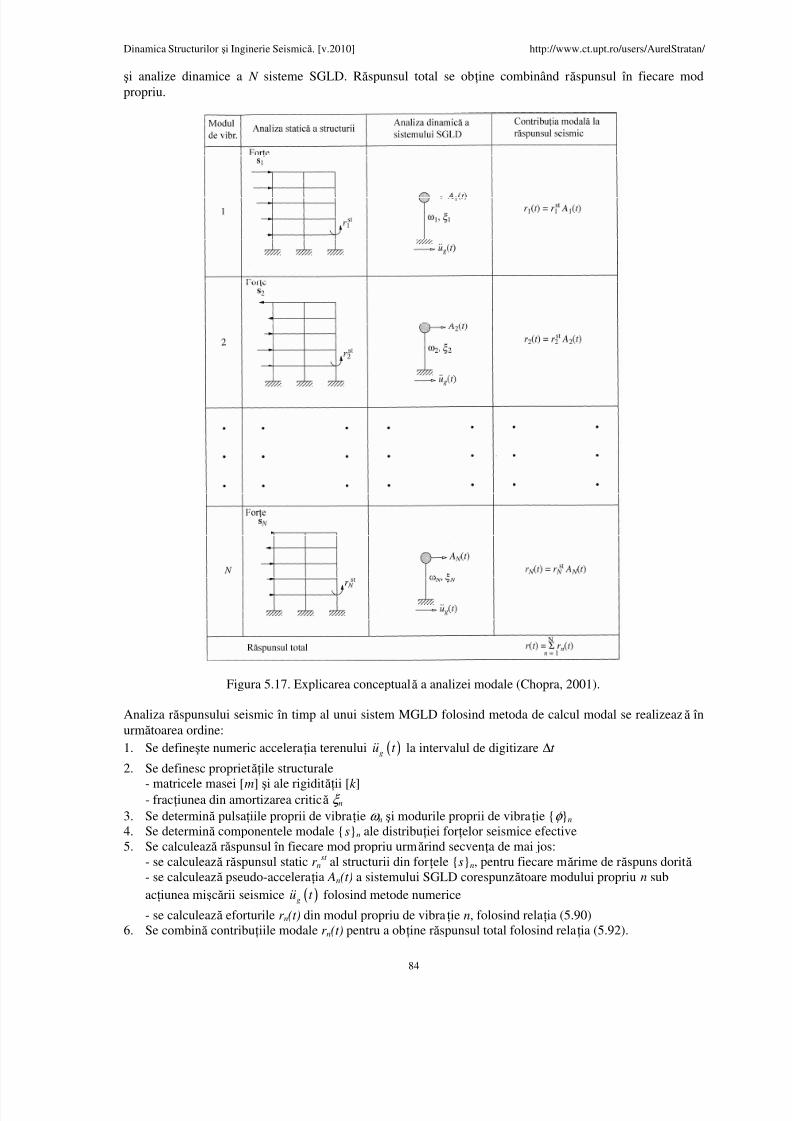
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 85/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
84
şi analize dinamice a N sisteme SGLD. Răspunsul total se obine combinând răspunsul în fiecare modpropriu.
Figura 5.17. Explicarea conceptuală a analizei modale (Chopra, 2001).
Analiza răspunsului seismic în timp al unui sistem MGLD folosind metoda de calcul modal se realizează înurmătoarea ordine:1. Se defineşte numeric acceleraia terenului ( )g
u t la intervalul de digitizare ∆t
2. Se definesc proprietăile structurale- matricele masei [m] şi ale rigidităii [k ]- fraciunea din amortizarea critică ξ n
3. Se determină pulsaiile proprii de vibraie ω n şi modurile proprii de vibraie φ n 4. Se determină componentele modale sn ale distribuiei forelor seismice efective5. Se calculează răspunsul în fiecare mod propriu urmărind secvena de mai jos:
- se calculează răspunsul static r nst al structurii din forele sn, pentru fiecare mărime de răspuns dorită
- se calculează pseudo-acceleraia An(t) a sistemului SGLD corespunzătoare modului propriu n sub
aciunea mişcării seismice ( )gu t folosind metode numerice
- se calculează eforturile r n(t) din modul propriu de vibraie n, folosind relaia (5.90)6. Se combină contribuiile modale r n(t) pentru a obine răspunsul total folosind relaia (5.92).

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 86/149
5. Sisteme cu mai multe grade de libertate dinamică
85
Masa modală efectivă
Penru analiza răspunsului dinamic al structurilor multietajate, este utilă introducerea noiunii de foră tăietoare de bază V b. Răspunsul static modal pentru această mărime este dat de relaia (vezi Figura 5.18):
*
1
N st
bn jn n n n
j
V s L M =
= = Γ ≡∑ (5.93)
unde s-au folosit notaiile:
( )
2
21*
2
1
n
j jn
jn
n n n n
n j jn
j
m L
M L M
m
φ
φ
=
=
= Γ = =
∑
∑(5.94)
Figura 5.18. Răspunsul static modal pentru fora tăietoare de bază (Chopra, 2001).
Pe baza ecuaiei (5.90), fora tăietoare de bază din modul propriu n poate fi exprimată prin:
( ) ( )st
bn bn nV t V A t = (5.95)
Înlocuind în această expresie relaia (5.93)
( ) ( )*bn n nV t M A t = (5.96)
Pentru un sistem SGLD cu masa m, pulsaia proprie de vibraie ω n şi fraciunea din amortizarea critică ξ n,
valoarea de vârf a forei tăietoare de bază este bV kD mA= =
, care pentru timpul t devine:( ) ( )b nV t mA t = (5.97)
Comparaia ecuaiilor (5.96) şi (5.97) indică faptul că, dacă masa sistemului SGLD ar fi M n*, fora tăietoare
de bază V b a sistemului SGLD ar fi identică cu fora tăietore de bază V bn a sistemului MGLD în modulpropriu n, care are masa distribuită la cele N nivele. Din acest motiv, M n
* se numeşte masa modală efectivă.În cazul unui sistem SGLD întreaga sa masă m este efectivă în producerea forei tăietoare de bază, după cumse poate vedea din relaia (5.97). În cazul unui sistem MGLD în schimb, doar fraciunea M n
* a masei totale astructurii este efectivă în producerea forei tăietoare de bază, deoarece masa este distribuită la cele N niveleale structurii. Suma maselor modale efective din cele N moduri proprii este egală cu masa totală a structurii:
*
1 1
N N
n jn j
M m= ==∑ ∑ (5.98)

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 87/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
86
(a) (b)
Figura 5.19. Forele statice echivalente şi fora tăietoare de bază în modul n (a); un sistem SGLDcorespunzător cu masa modală efectivă şi înălimea modală efectivă (b), Chopra, 2001.
5.3.3. Analiza spectrală
Răspunsul seismic în timp al unui sistem MGLD poate fi determinat folosind analiza modală descrisă înseciunea 5.3.2. În practica curentă de proiectare, dimensionarea structurilor se bazează însă pe valorile devârf ale forelor şi deplasărilor seismice. În cele ce urmează se va prezenta o metodă de determinare directă avalorilor de vârf ale răspunsului seismic al sistemelor MGLD. Această metodă de calcul se numeşte analiză spectrală.
Răspunsul de vârf r no al contribuiei r n(t) din modul propriu de vibraie n al răspunsului r(t) se poate obinedintr-un spectru de răspuns. Acest fapt este evident din ecuaia (5.90), valoarea de vârf An a pseudo-acceleraiei An(t) reprezentând ordonata spectrală din spectrul de pseudo-acceleraie corespunzătoareperioadei T n şi fraciunii din amortizarea critică ξ n. Astfel:
0st
n n nr r A= (5.99)
Semnul algebric al r n0 este acelaşi cu semnul r nst , deoarece An este pozitivă prin definiie.
În Figura 5.20 sunt prezentate contribuiile modale şi valorile totale ale forei tăietoare de bază şi foreităietoare la nivelul 5 al unui cadru cu 5 nivele, determinate printr-o analiză modală. Răspunsul de vârf alcontribuiilor modale V bn(t) se înregistrează în general la momente diferite de timp, la fel şi valoarea de vârf a
răspunsului total V b(t). Din această cauză este dificilă obinerea răspunsului de vârf total ( )0 maxt r r t = pe
baza răspunsului de vârf din modurile proprii n = 1, 2, …, N : ( )0 maxn t nr r t = . În consecină, se folosesc
diverse aproximări prin care se determină răspunsul de vârf total r 0 pe baza răspunsurilor modale de vârf r n0.
Una dintre posibilităi este considerarea că toate valorile de vârf ale răspunsurilor modale au loc la acelaşitimp şi au acelaşi semn algebric. Această ipoteză conduce la expresia:
0 01
N
n
n
r r =
= ∑ (5.100)
Această metodă de combinare se numeşte suma valorilor absolute (ABS) şi oferă o aproximarecorespunzătoare a răspunsului total doar pentru structurile care au perioade proprii de vibraie apropiate.
O altă metodă de combinare a răspunsurilor modale este radical din suma pătratelor (RSP):
20 0
1
N
n
n
r r =
= ∑ (5.101)
Această metodă de combinare a răspunsurilor modale oferă o aproximare corespunzătoare a răspunsului totaldoar pentru structurile care au perioade proprii de vibraie distincte şi suficient de diferite ca valoare.
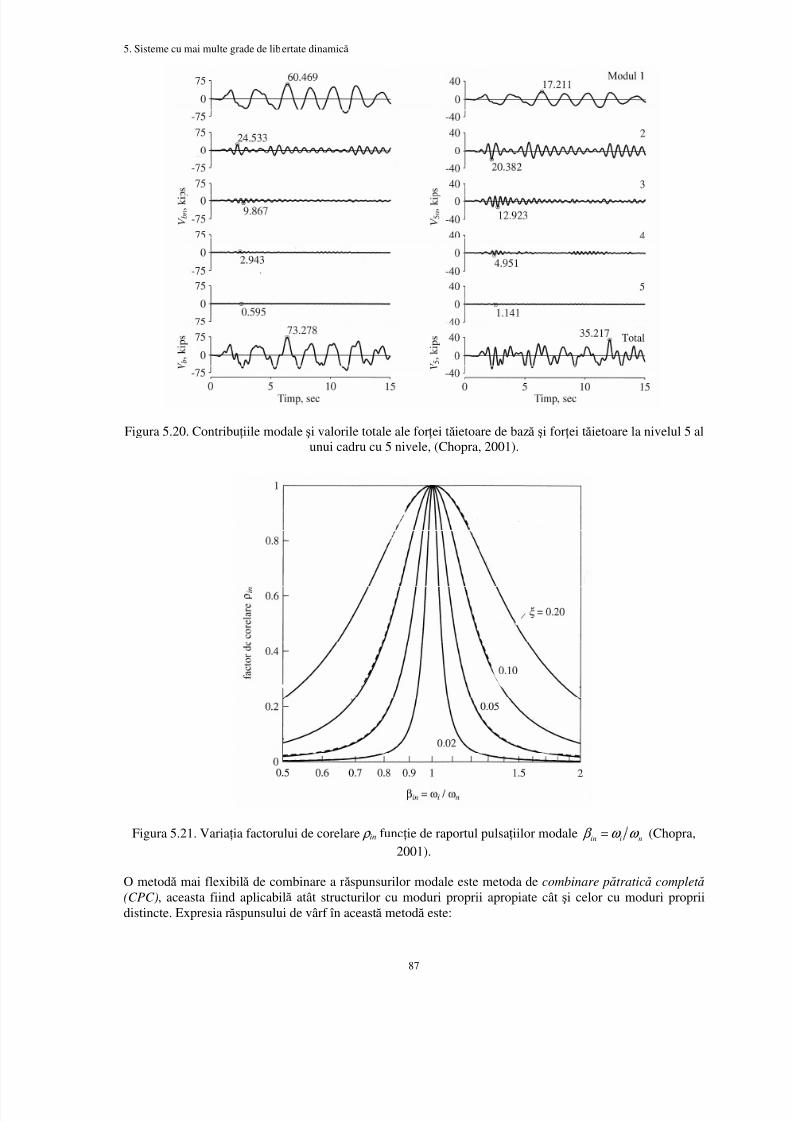
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 88/149
5. Sisteme cu mai multe grade de libertate dinamică
87
Figura 5.20. Contribuiile modale şi valorile totale ale forei tăietoare de bază şi forei tăietoare la nivelul 5 alunui cadru cu 5 nivele, (Chopra, 2001).
Figura 5.21. Variaia factorului de corelare ρ in funcie de raportul pulsaiilor modale in i n β ω ω = (Chopra,
2001).
O metodă mai flexibilă de combinare a răspunsurilor modale este metoda de combinare pătratică complet ă
(CPC), aceasta fiind aplicabilă atât structurilor cu moduri proprii apropiate cât şi celor cu moduri propriidistincte. Expresia răspunsului de vârf în această metodă este:

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 89/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
88
0 0 01 1
N N
in i n
i n
r r r ρ = =
= ∑ ∑ (5.102)
Fiecare termen de sub radicalul acestei relaii reprezintă produsul dintre coeficientul de corelare ρ in şivalorile de vârf ale răspunsurilor modale r i0 şi r n0. Coeficientul de corelare variază între 0 şi 1, avândvaloarea unitară pentru i = n: ρ in = 1. Astfel, ecuaia (5.102) poate fi rescrisă sub forma:
20 0 0 0
1 1 1
N N N
n in i n
n i n
i n
r r r r ρ = = =
≠
= +∑ ∑ ∑
(5.103)
Primul termen de sub radical este identic cu metoda RSP, iar cel de-al doilea termen include toi factorii(i ≠ n), reprezentând "corecia" aplicată metodei RSP pentru modurile proprii care nu sunt distincte.
Variaia factorului de corelare ρ in funcie de raportul pulsaiilor modale in i n β ω ω = este prezentată în Figura
5.21. Se poate observa că pentru moduri proprii distincte (cu valori ω i ≠ ω n) factorul de corelare scade rapidodată cu creşterea raportului dintre pulsaii, astfel încât metoda CPC se reduce la metoda RSP. În cazul încare structura are moduri proprii apropiate (ω i ≅ ω n), factorul de corelare este apropiat de valoarea unitară,
răspunsul total fiind mai mare decât cel determinat cu metoda RSP.Metodele RSP şi CPC au la bază teoria vibraiilor stocastice (aleatorii). De aceea, aceste metode decombinare a răspunsurilor modale, cât şi metoda spectrală de determinare a răspunsului seismic alstructurilor MGLD se potrivesc mişcărilor seismice cu o bandă largă de frecvene şi o durată lungă. Metodaspectrală nu este potrivită cutremurelor de tip puls sau celor care au o mişcare apropiată de cea armonică.Metoda spectrală de determinare a răspunsului seismic este deosebit de utilă în proiectare, aceasta fiindmetoda standard de determinare a răspunsului seismic în normele seismice moderne.
Avantajul metodei spectrale este acela că aceasta oferă răspunsul seismic de vârf al unui sistem MGLD, prinefectuarea unei serii de analize statice. Astfel, pentru fiecare mod propriu n, se efectuează o analiză statică din forele sn, care oferă răspunsul modal static r n
st . Înmulind această mărime cu ordonata spectrală An, seobine răspunsul modal de vârf r n0. Astfel, analiza dinamică a sistemului SGLD nu mai este necesară,
deoarece informaia corespunzătoare este coninută în spectrul de răspuns.În analiza spectrală este utilă determinarea răspunsului modal de vârf r n0 direct din forele statice echivalente:
n jn n j jn nn n f s A f m Aφ = = Γ (5.104)
unde f n este vectorul forelor statice echivalente f jn pe direcia gradelor de libertate j = 1, 2, …, N (deplasările orizontale la nivelele j).
Analiza spectrală a unui sistem MGLD poate fi efectuată în următoarea ordine:1. Se definesc proprietăile structurale
- matricele masei [m] şi rigidităii [k ]- fraciunea din amortizarea critică ξ n
2. Se determină pulsaiile proprii de vibraie ω n (cu perioada proprie corespunzătoare T n = 2π / ω n) şimodurile proprii de vibraie φ n
3. Se calculează răspunsul în fiecare mod propriu urmărind secvena de mai jos:- pentru perioada proprie T n şi fraciunea din amortizarea critică ξ n se determină din spectrul de pseudo-acceleraie ordonata spectrală An - se calculează forele statice echivalente f n folosind relaia (5.104)- se calculează răspunsul r n din forele f n, pentru fiecare cantitate de răspuns dorită (eforturi, deplasări,etc.)
4. Se combină contribuiile modale r n pentru a obine răspunsul total folosind metoda RSP sau CPC.
În general, doar primele câteva moduri proprii de vibraie contribuie semnificativ la răspunsul total alstructurii. De aceea, de obicei, etapele de la punctul (3) se parcurg doar pentru primele câteva moduri proprii
de vibraie.
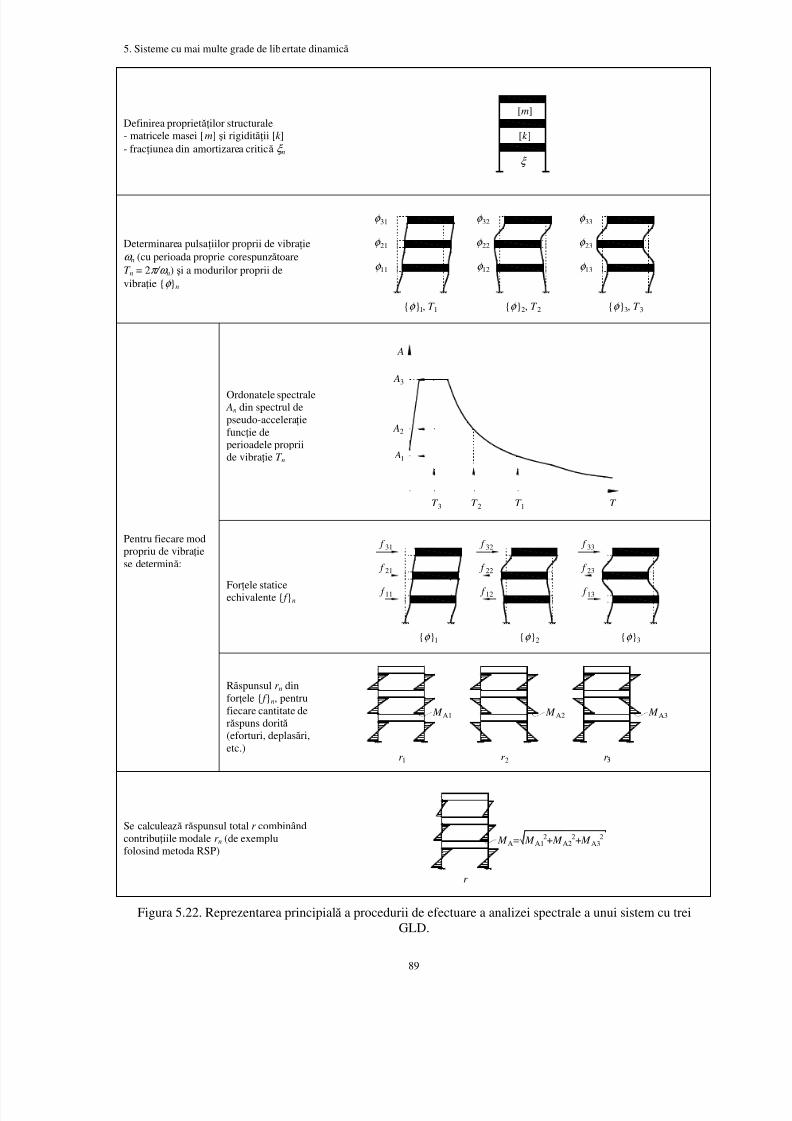
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 90/149
5. Sisteme cu mai multe grade de libertate dinamică
89
Definirea proprietăilor structurale- matricele masei [m] şi rigidităii [k ]- fraciunea din amortizarea critică ξ n
ξ
[m]
[k ]
Determinarea pulsaiilor proprii de vibraieω n (cu perioada proprie corespunzătoareT n = 2π / ω n) şi a modurilor proprii devibraie φ n
φ 1, T 1 φ 2, T 2 φ 3, T 3
φ 31
φ 21
φ 11
φ 32
φ 22
φ 12
φ 33
φ 23
φ 13
Ordonatele spectrale An din spectrul depseudo-acceleraiefuncie deperioadele propriide vibraie T n
A
T T 3 T 2 T 1
A3
A2
A1
Forele staticeechivalente f n
φ 1 φ 2 φ 3
f 31
f 21
f 11
f 32
f 22
f 12
f 33
f 23
f 13
Pentru fiecare modpropriu de vibraiese determină:
Răspunsul r n dinforele f n, pentru
fiecare cantitate derăspuns dorită (eforturi, deplasări,etc.)
r 1 r 2 r
M A1 M A2 M A3
Se calculează răspunsul total r combinândcontribuiile modale r n (de exemplufolosind metoda RSP)
r
M A=√ M A12+ M A2
2+ M A32
Figura 5.22. Reprezentarea principială a procedurii de efectuare a analizei spectrale a unui sistem cu treiGLD.
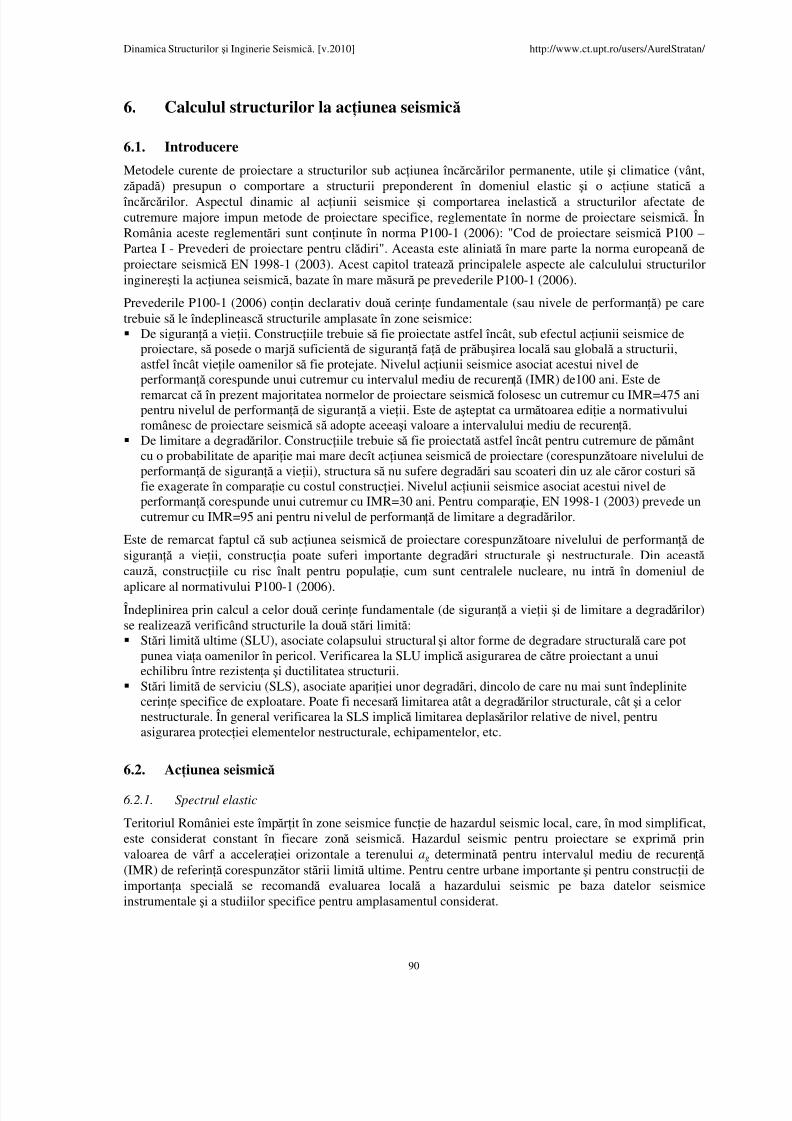
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 91/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
90
6. Calculul structurilor la aciunea seismică
6.1. Introducere
Metodele curente de proiectare a structurilor sub aciunea încărcărilor permanente, utile şi climatice (vânt,zăpadă) presupun o comportare a structurii preponderent în domeniul elastic şi o aciune statică a
încărcărilor. Aspectul dinamic al aciunii seismice şi comportarea inelastică a structurilor afectate decutremure majore impun metode de proiectare specifice, reglementate în norme de proiectare seismică. ÎnRomânia aceste reglementări sunt coninute în norma P100-1 (2006): "Cod de proiectare seismică P100 –Partea I - Prevederi de proiectare pentru clădiri". Aceasta este aliniată în mare parte la norma europeană deproiectare seismică EN 1998-1 (2003). Acest capitol tratează principalele aspecte ale calculului structuriloringinereşti la aciunea seismică, bazate în mare măsură pe prevederile P100-1 (2006).
Prevederile P100-1 (2006) conin declarativ două cerine fundamentale (sau nivele de performană) pe caretrebuie să le îndeplinească structurile amplasate în zone seismice: De sigurană a vieii. Construciile trebuie să fie proiectate astfel încât, sub efectul aciunii seismice de
proiectare, să posede o marjă suficientă de sigurană faă de prăbuşirea locală sau globală a structurii,astfel încât vieile oamenilor să fie protejate. Nivelul aciunii seismice asociat acestui nivel deperformană corespunde unui cutremur cu intervalul mediu de recurenă (IMR) de100 ani. Este deremarcat că în prezent majoritatea normelor de proiectare seismică folosesc un cutremur cu IMR=475 anipentru nivelul de performană de sigurană a vieii. Este de aşteptat ca următoarea ediie a normativuluiromânesc de proiectare seismică să adopte aceeaşi valoare a intervalului mediu de recurenă.
De limitare a degradărilor. Construciile trebuie să fie proiectată astfel încât pentru cutremure de pământcu o probabilitate de apariie mai mare decît aciunea seismică de proiectare (corespunzătoare nivelului deperformană de sigurană a vieii), structura să nu sufere degradări sau scoateri din uz ale căror costuri să fie exagerate în comparaie cu costul construciei. Nivelul aciunii seismice asociat acestui nivel deperformană corespunde unui cutremur cu IMR=30 ani. Pentru comparaie, EN 1998-1 (2003) prevede uncutremur cu IMR=95 ani pentru nivelul de performană de limitare a degradărilor.
Este de remarcat faptul că sub aciunea seismică de proiectare corespunzătoare nivelului de performană desigurană a vieii, construcia poate suferi importante degradări structurale şi nestructurale. Din această cauză, construciile cu risc înalt pentru populaie, cum sunt centralele nucleare, nu intră în domeniul deaplicare al normativului P100-1 (2006).
Îndeplinirea prin calcul a celor două cerine fundamentale (de sigurană a vieii şi de limitare a degradărilor)se realizează verificând structurile la două stări limită: Stări limită ultime (SLU), asociate colapsului structural şi altor forme de degradare structurală care pot
punea viaa oamenilor în pericol. Verificarea la SLU implică asigurarea de către proiectant a unuiechilibru între rezistena şi ductilitatea structurii.
Stări limită de serviciu (SLS), asociate apariiei unor degradări, dincolo de care nu mai sunt îndeplinitecerine specifice de exploatare. Poate fi necesară limitarea atât a degradărilor structurale, cât şi a celor
nestructurale. În general verificarea la SLS implică limitarea deplasărilor relative de nivel, pentruasigurarea proteciei elementelor nestructurale, echipamentelor, etc.
6.2. Aciunea seismică
6.2.1. Spectrul elastic
Teritoriul României este împărit în zone seismice funcie de hazardul seismic local, care, în mod simplificat,este considerat constant în fiecare zonă seismică. Hazardul seismic pentru proiectare se exprimă prinvaloarea de vârf a acceleraiei orizontale a terenului ag determinată pentru intervalul mediu de recurenă (IMR) de referină corespunzător stării limită ultime. Pentru centre urbane importante şi pentru construcii de
importana specială se recomandă evaluarea locală a hazardului seismic pe baza datelor seismiceinstrumentale şi a studiilor specifice pentru amplasamentul considerat.
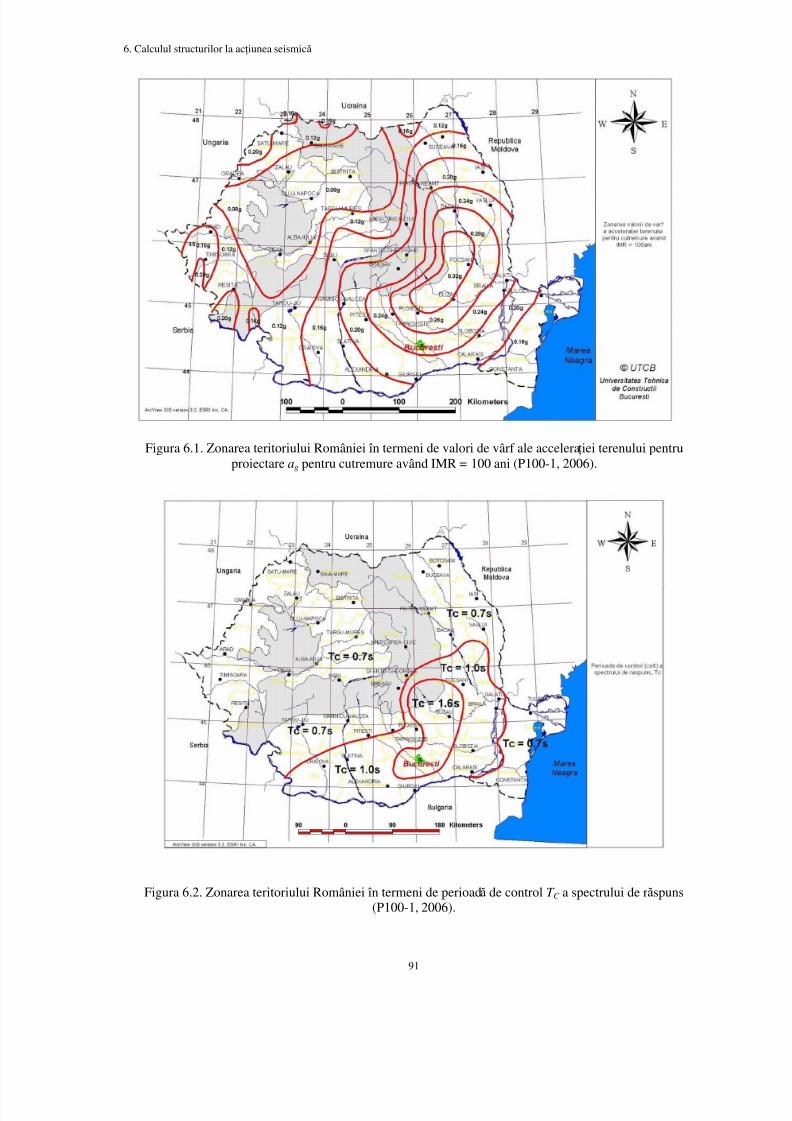
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 92/149
6. Calculul structurilor la aciunea seismică
91
Figura 6.1. Zonarea teritoriului României în termeni de valori de vârf ale acceleraiei terenului pentruproiectare ag pentru cutremure având IMR = 100 ani (P100-1, 2006).
Figura 6.2. Zonarea teritoriului României în termeni de perioadă de control T C a spectrului de răspuns(P100-1, 2006).

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 93/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
92
Zonarea acceleraiei de vârf a terenului pentru proiectare ag în România, pentru evenimente seismice avândintervalul mediu de recurenă IMR = 100 ani, este prezentată în Figura 6.1. Aceste valori ale ag se folosescpentru proiectarea construciilor la starea limită ultimă.
Aciunea seismică într-un punct de pe suprafaa terenului este descrisă prin spectre de răspuns elastic depseudo-acceleraie: două componente orizontale şi una verticală. Componentele orizontale ale mişcăriiseismice sunt considerate independente şi sunt descrise de acelaşi spectru.
Condiiile locale de teren afectează forma spectrelor de răspuns elastic şi modifică atât amplificareaacceleraiei de vârf a terenului, cât şi coninutul de frecvene al mişcării seismice (exprimat prin valorileperioadelor de control T B, T C şi T D). Normativul P100-1 (2006) reflectă doar cel de-al doilea aspect,specificând trei valori ale perioadei de control T C pe o hartă de zonare macroseismică (vezi Figura 6.2). Uneivalori a perioadei de control T C îi corespund o pereche de valori T B şi T D, în conformitate cu Tabelul 6.1.Perioada de control T C a spectrului de răspuns reprezintă limita dintre zona de pseudo-acceleraie constantă şizona de pseudo-viteză constantă. În mod similar, perioada de control T D reprezintă limita dintre zona depseudo-viteză constantă şi zona de deplasare constantă.
Tabelul 6.1. Perioadele de control T B, T C şi T D ale spectrului de răspuns pentru componentele orizontale alemişcării seismice (P100-1, 2006).
Interval mediu de recurenă a magnitudinii cutremurului Valori ale perioadelor de controlT B , s 0.07 0.10 0.16T C , s 0.7 1.0 1.6
IMR = 100 ani, pentru SLU
T D , s 3.0 3.0 2.0
Spectrul de răspuns elastic pentru componentele orizontale ale pseudo-acceleraiei terenului în amplasamentSe(T), exprimat în m/s2, este definit astfel:
( )( )e g
S T a T β = (6.1)
unde valoarea ag este acceleraia de vârf a terenului, exprimată în m/s2, iar β (T) este spectrul de răspunselastic normalizat la valoarea de vârf a acceleraiei terenului.
Forma normalizată a spectrelor de răspuns elastic pentru componentele orizontale ale acceleraiei terenului, β (T), pentru fraciunea din amortizarea critică ξ =0.05 este dată de relaiile (vezi Figura 6.3):
0≤ ≤≤ ≤ T ≤ ≤≤ ≤ T B: ( )( )0 1
1 B
T T T
β β
−= + (6.2)
T B<T ≤ T C : ( ) 0T β β = (6.3)
T C <T ≤ T D: ( ) 0C
T T
T β β = (6.4)
T> T D: ( ) 0 2C D
T T T
T
β β = (6.5)
unde: β 0 - factorul de amplificare dinamică maximă a acceleraiei orizontale a terenului de către structură; T -perioada proprie de vibraie a unui sistem SGLD cu răspuns elastic.
Componenta verticală a mişcării seismice într-un amplasament este dată de relaii similare (6.1) - (6.5).Acceleraia de vârf verticală a terenului se consideră în mod aproximativ egală cu 70% din valoareaacceleraiei de vârf orizontale, iar perioadele de control T B şi T C pentru componenta verticală a mişcăriiseismice sunt mai mici decât cele ale componentei orizontale.
Alternativ spectrului de răspuns elastic al pseudo-acceleraiei, mişcarea seismică poate fi definită prinvariaia în timp a acceleraiei terenului (accelerograme). Pentru modele structurale spaiale, sunt necesare treiaccelerograme: două pentru componentele orizontale ale mişcării seismice şi una pentru componenta
verticală. Accelerogramele pot fi înregistrate în timpul unor evenimente seismice anterioare, sau pot fiaccelerograme artificiale, generate pe baza spectrului de răspuns elastic. În ambele cazuri, la proiectarea uneistructuri trebuie luate în calcul minim trei seturi de accelerograme, pentru a ine cont de incertitudinileasociate unei singure accelerograme. Accelerogramele trebuie să fie reprezentative pentru amplasamentul
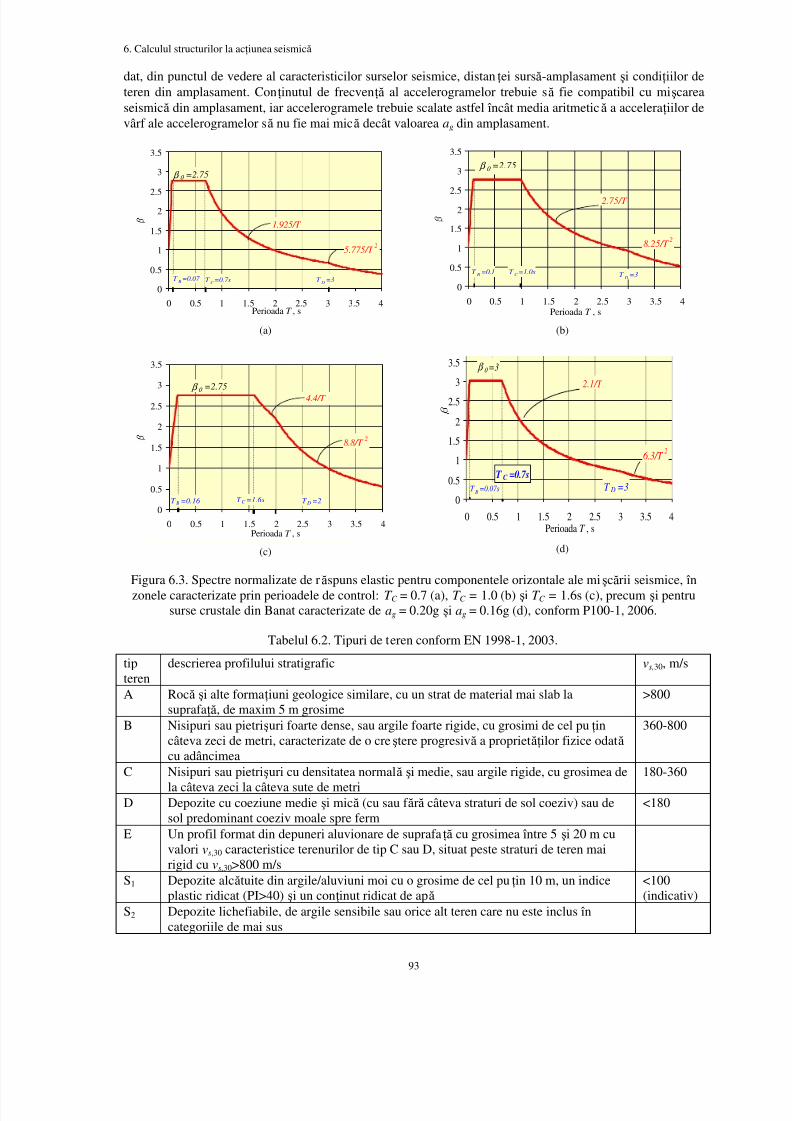
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 94/149
6. Calculul structurilor la aciunea seismică
93
dat, din punctul de vedere al caracteristicilor surselor seismice, distanei sursă-amplasament şi condiiilor deteren din amplasament. Coninutul de frecvenă al accelerogramelor trebuie să fie compatibil cu mişcareaseismică din amplasament, iar accelerogramele trebuie scalate astfel încât media aritmetică a acceleraiilor devârf ale accelerogramelor să nu fie mai mică decât valoarea ag din amplasament.
0
0.5
1
1.5
2
2.5
3
3.5
0 0.5 1 1.5 2 2.5 3 3.5 4Perioada T , s
T B=0.07 T
D=3
5.775/T 2
1.925/T
β 0 =2.75
T C =0.7s
(a)
0
0.5
1
1.5
2
2.5
3
3.5
0 0.5 1 1.5 2 2.5 3 3.5 4
Perioada T , s
T C =1.0s
2.75/T
β 0 =2.75
T B=0.1
T D=3
8.25/T 2
(b)
0
0.5
1
1.5
2
2.5
3
3.5
0 0.5 1 1.5 2 2.5 3 3.5 4
Perioada T , s
T D =2
8.8/T 2
4.4/T
β 0 =2.75
T B =0.16 T C =1.6s
(c)
0
0.5
1
1.5
2
2.5
3
3.5
0 0.5 1 1.5 2 2.5 3 3.5 4
Perioada T , s
T B=0.07s
2.1/T
β 0 =3
T C =0.7s
T D=3
6.3/T 2
(d)
Figura 6.3. Spectre normalizate de răspuns elastic pentru componentele orizontale ale mişcării seismice, înzonele caracterizate prin perioadele de control: T C = 0.7 (a), T C = 1.0 (b) şi T C = 1.6s (c), precum şi pentru
surse crustale din Banat caracterizate de ag = 0.20g şi ag = 0.16g (d), conform P100-1, 2006.
Tabelul 6.2. Tipuri de teren conform EN 1998-1, 2003.
tipteren
descrierea profilului stratigrafic vs,30, m/s
A Rocă şi alte formaiuni geologice similare, cu un strat de material mai slab la
suprafaă, de maxim 5 m grosime
>800
B Nisipuri sau pietrişuri foarte dense, sau argile foarte rigide, cu grosimi de cel puincâteva zeci de metri, caracterizate de o creştere progresivă a proprietăilor fizice odată cu adâncimea
360-800
C Nisipuri sau pietrişuri cu densitatea normală şi medie, sau argile rigide, cu grosimea dela câteva zeci la câteva sute de metri
180-360
D Depozite cu coeziune medie şi mică (cu sau f ără câteva straturi de sol coeziv) sau desol predominant coeziv moale spre ferm
<180
E Un profil format din depuneri aluvionare de suprafaă cu grosimea între 5 şi 20 m cuvalori vs,30 caracteristice terenurilor de tip C sau D, situat peste straturi de teren mairigid cu vs,30>800 m/s
S1 Depozite alcătuite din argile/aluviuni moi cu o grosime de cel puin 10 m, un indice
plastic ridicat (PI>40) şi un coninut ridicat de apă
<100
(indicativ)S2 Depozite lichefiabile, de argile sensibile sau orice alt teren care nu este inclus în
categoriile de mai sus
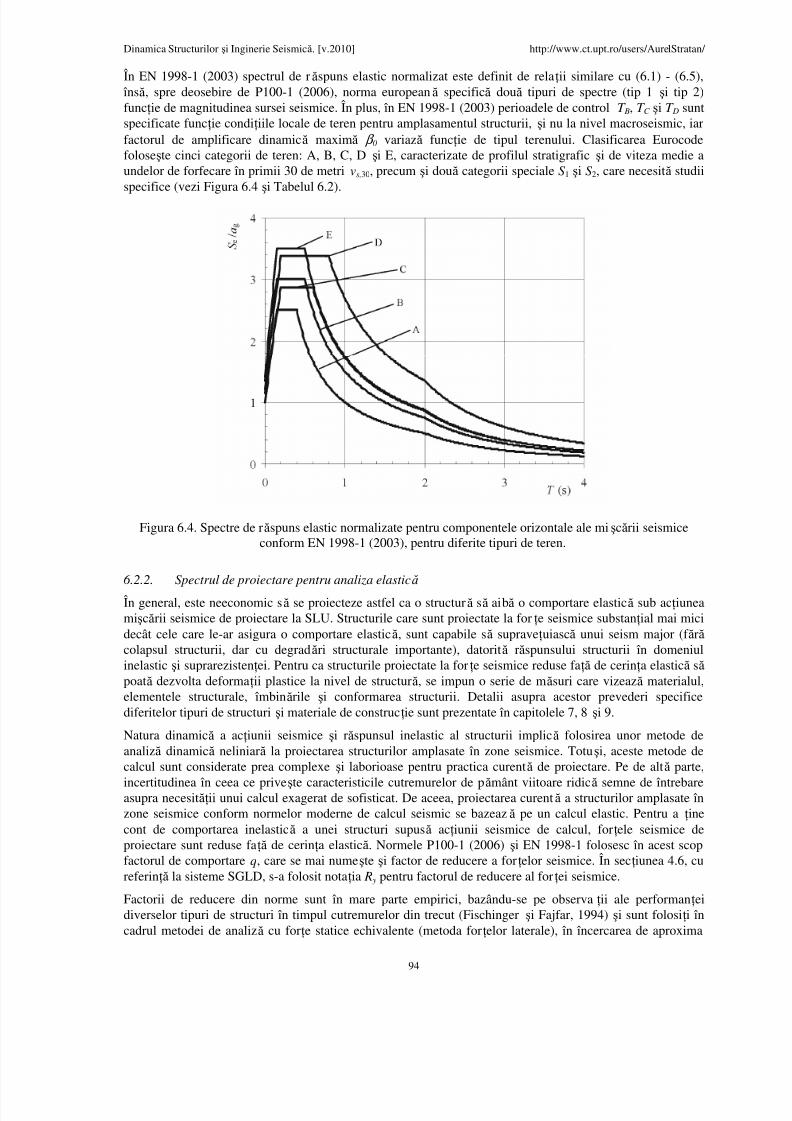
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 95/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
94
În EN 1998-1 (2003) spectrul de răspuns elastic normalizat este definit de relaii similare cu (6.1) - (6.5), însă, spre deosebire de P100-1 (2006), norma europeană specifică două tipuri de spectre (tip 1 şi tip 2)funcie de magnitudinea sursei seismice. În plus, în EN 1998-1 (2003) perioadele de control T B, T C şi T D suntspecificate funcie condiiile locale de teren pentru amplasamentul structurii, şi nu la nivel macroseismic, iarfactorul de amplificare dinamică maximă β 0 variază funcie de tipul terenului. Clasificarea Eurocodefoloseşte cinci categorii de teren: A, B, C, D şi E, caracterizate de profilul stratigrafic şi de viteza medie aundelor de forfecare în primii 30 de metri v
s,30, precum şi două categorii speciale S
1 şi S
2, care necesită studii
specifice (vezi Figura 6.4 şi Tabelul 6.2).
Figura 6.4. Spectre de răspuns elastic normalizate pentru componentele orizontale ale mişcării seismiceconform EN 1998-1 (2003), pentru diferite tipuri de teren.
6.2.2. Spectrul de proiectare pentru analiza elastică
În general, este neeconomic să se proiecteze astfel ca o structură să aibă o comportare elastică sub aciuneamişcării seismice de proiectare la SLU. Structurile care sunt proiectate la fore seismice substanial mai micidecât cele care le-ar asigura o comportare elastică, sunt capabile să supraveuiască unui seism major (f ără colapsul structurii, dar cu degradări structurale importante), datorită răspunsului structurii în domeniulinelastic şi suprarezistenei. Pentru ca structurile proiectate la fore seismice reduse faă de cerina elastică să poată dezvolta deformaii plastice la nivel de structură, se impun o serie de măsuri care vizează materialul,elementele structurale, îmbinările şi conformarea structurii. Detalii asupra acestor prevederi specifice
diferitelor tipuri de structuri şi materiale de construcie sunt prezentate în capitolele 7, 8 şi 9.Natura dinamică a aciunii seismice şi răspunsul inelastic al structurii implică folosirea unor metode deanaliză dinamică neliniară la proiectarea structurilor amplasate în zone seismice. Totuşi, aceste metode decalcul sunt considerate prea complexe şi laborioase pentru practica curentă de proiectare. Pe de altă parte,incertitudinea în ceea ce priveşte caracteristicile cutremurelor de pământ viitoare ridică semne de întrebareasupra necesităii unui calcul exagerat de sofisticat. De aceea, proiectarea curentă a structurilor amplasate înzone seismice conform normelor moderne de calcul seismic se bazează pe un calcul elastic. Pentru a inecont de comportarea inelastică a unei structuri supusă aciunii seismice de calcul, forele seismice deproiectare sunt reduse faă de cerina elastică. Normele P100-1 (2006) şi EN 1998-1 folosesc în acest scopfactorul de comportare q, care se mai numeşte şi factor de reducere a forelor seismice. În seciunea 4.6, cureferină la sisteme SGLD, s-a folosit notaia R y pentru factorul de reducere al forei seismice.
Factorii de reducere din norme sunt în mare parte empirici, bazându-se pe observa ii ale performaneidiverselor tipuri de structuri în timpul cutremurelor din trecut (Fischinger şi Fajfar, 1994) şi sunt folosii încadrul metodei de analiză cu fore statice echivalente (metoda forelor laterale), în încercarea de aproxima

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 96/149
6. Calculul structurilor la aciunea seismică
95
forele minime care pot fi folosite la proiectare astfel ca să se asigure un răspuns satisf ăcător al structurii îndomeniul inelastic (EN 1998-1, 2003).
Procedura de obinere a factorului de reducere a forei seismice pentru un sistem SGLD este prezentată înFigura 6.5. S-a presupus că perioada proprie de vibraie T n a sistemului este mai mare decât perioada decontrol T C a mişcării seismice, fiind valabilă regula "deplasărilor egale" (vezi seciunea 4.6.3). Dacă laproiectarea sistemului SGLD s-ar folosi un calcul inelastic, relaia de verificare ar fi:
cap µ µ ≤ (6.6)
unde µ este cerina de ductilitate impusă sistemului de mişcarea seismică, iar µ cap este ductilitatea capabilă asistemului.
Alternativ, se poate determina valoarea forei de curgere a sistemului F y pentru care este satisf ăcută relaia(6.6). Pentru aceasta, se normalizează fora la valoarea forei de curgere (F e / F y = R y) iar cerina de deplasarela valoarea deplasării de curgere ( Dm / D y = µ ). În urma acestei operaiuni, relaia F – D se transformă înrelaia R y - µ (factorul de reducere al forei seismice - ductilitate). Impunând la limită µ = µ cap, se poateobine valoarea factorului de reducere a forei seismice R y, care va depinde de perioada proprie de vibraie asistemului SGLD şi caracteristicile mişcării seismice (prin perioada de control T C ). În acest scop se pot folosirelaiile (4.16), exemplificate în Figura 4.19. Cunoscând factorul de reducere R y, se poate determina valoareaminimă a forei de curgere F y =F e / R y care trebuie asigurată sistemului pentru ca cerina de ductilitate să nudepăşească ductilitatea capabilă.
D
F
F e
F y
De=Dm D y
D R y
1
µ1
R
µ
F
(a) (b) (c)
Figura 6.5. Fora seismică aplicată unui sistem SGLD (a); relaia foră-deplasare pentru sistemul inelastic şipentru sistemul elastic corespunzător (b) şi relaia echivalentă între factorul de reducere şi ductilitate (c).
În cazul teoretic al sistemelor SGLD cu o comportare inelastică idealizată, factorul de reducere a foreiseismice se datorează în exclusivitate ductilităii structurii. Cu toate că ductilitatea rămâne factorul cel maiimportant care permite reducerea forei seismice de proiectare în cazul sistemelor MGLD, există şi alteaspecte care contribuie la reducerea forei seismice de proiectare. Din considerente de simplitate, majoritateanormelor seismice utilizează un singur factor de reducere a forelor seismice. Totuşi, diferenierea şicuantificarea factorilor responsabili de reducerea forelor seismice este utilă pentru o mai bună înelegere arăspunsului seismic al structurilor amplasate în zone seismice. În Figura 6.6 este prezentată o relaie tipică dintre fora tăietoare de bază şi deplasarea la vârf a unei structuri. Pentru simplificarea răspunsului neliniar alstructurii se adoptă adeseori o idealizare biliniară. Pe baza acesteia se poate defini ductilitatea globală astructurii:
u y µ δ δ = (6.7)
unde δ u este deplasarea ultimă a sistemului, iar δ y este deplasarea corespunzătoare curgerii globale. Se maidefinesc următorii termeni: V e - fora corespunzătoare unui răspuns infinit elastic; V y - fora de curgere asistemului; V 1 – fora tăietoare de bază la formarea primei articulaii plastice; V d - fora tăietoare de bază deproiectare.
Factorul de reducere a forelor seismice datorat ductilităii structurii a fost studiat pe larg pentru sisteme cu
un singur grad de libertate dinamică, şi poate fi definit ca (Bruneau şi colab., 1998; Fischinger şi Fajfar,1994):
e yq V V µ = (6.8)
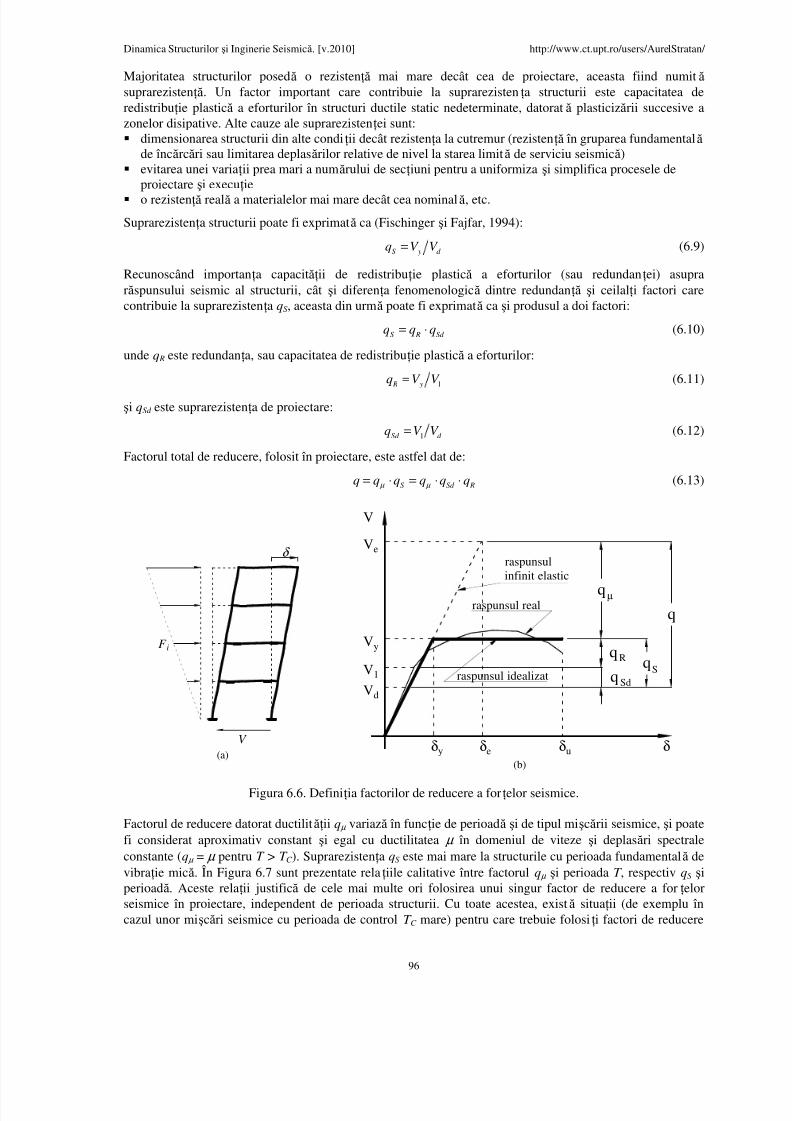
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 97/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
96
Majoritatea structurilor posedă o rezistenă mai mare decât cea de proiectare, aceasta fiind numită suprarezistenă. Un factor important care contribuie la suprarezistena structurii este capacitatea deredistribuie plastică a eforturilor în structuri ductile static nedeterminate, datorată plasticizării succesive azonelor disipative. Alte cauze ale suprarezistenei sunt: dimensionarea structurii din alte condiii decât rezistena la cutremur (rezistenă în gruparea fundamentală
de încărcări sau limitarea deplasărilor relative de nivel la starea limită de serviciu seismică) evitarea unei variaii prea mari a numărului de seciuni pentru a uniformiza şi simplifica procesele de
proiectare şi execuie o rezistenă reală a materialelor mai mare decât cea nominală, etc.
Suprarezistena structurii poate fi exprimată ca (Fischinger şi Fajfar, 1994):
S y d q V V = (6.9)
Recunoscând importana capacităii de redistribuie plastică a eforturilor (sau redundanei) asuprarăspunsului seismic al structurii, cât şi diferena fenomenologică dintre redundană şi ceilali factori carecontribuie la suprarezistena qS, aceasta din urmă poate fi exprimată ca şi produsul a doi factori:
S R Sd q q q= ⋅ (6.10)
unde q R este redundana, sau capacitatea de redistribuie plastică a eforturilor:1 R y
q V V = (6.11)
şi qSd este suprarezistena de proiectare:
1Sd d q V V = (6.12)
Factorul total de reducere, folosit în proiectare, este astfel dat de:
S Sd Rq q q q q q µ µ = ⋅ = ⋅ ⋅ (6.13)
δ
F i
V (a)
raspunsulinfinit elastic
uδyδ δe
1V
Vy
V
δ
Vd
Ve
q
q
q
µ
R
Sd
qS
qraspunsul real
raspunsul idealizat
(b)
Figura 6.6. Definiia factorilor de reducere a forelor seismice.
Factorul de reducere datorat ductilităii q µ variază în funcie de perioadă şi de tipul mişcării seismice, şi poatefi considerat aproximativ constant şi egal cu ductilitatea µ în domeniul de viteze şi deplasări spectraleconstante (q µ = µ pentru T > T C ). Suprarezistena qS este mai mare la structurile cu perioada fundamentală devibraie mică. În Figura 6.7 sunt prezentate relaiile calitative între factorul q µ şi perioada T , respectiv qS şi
perioadă. Aceste relaii justifică de cele mai multe ori folosirea unui singur factor de reducere a forelorseismice în proiectare, independent de perioada structurii. Cu toate acestea, există situaii (de exemplu încazul unor mişcări seismice cu perioada de control T C mare) pentru care trebuie folosii factori de reducere

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 98/149
6. Calculul structurilor la aciunea seismică
97
datorai ductilităii mai mici decât cei folosii în mod curent pentru mişcări seismice cu perioada de controlmică.
q
Τ
S
µq
q
0
1
Figura 6.7. Relaie calitativă tipică între factorii de reducere q µ şi qS şi perioada T ,(Fischinger şi Fajfar, 1994).
Forele seismice de proiectare se determină pe baza spectrului de proiectare al pseudo-acceleraiei Sd (T).
Acesta este exprimat în m/s2 şi este definit în P100-1 (2006) de următoarele relaii:
0≤ ≤≤ ≤ T ≤ ≤≤ ≤ T B:
0 1( ) 1d g
B
qS T a T
T
β −
= +
(6.14)
T> T B:( )
( )d g
T S T a
q
β = (6.15)
Conform prevederilor P100-1 (2006), valorile factorului de comportare q diferă funcie de tipul materialului,sistemul structural şi regularitatea structurii.
0 1 2 3 40
0.2
0.4
0.6
0.8
T, s
p s e u d o
− a c c e l e r a t i e , g
P100−1/2006, TC
=0.7, ag=0.24g
Se
Sd, q=6
Figura 6.8. Comparaie între un spectru elastic (Se) şi un spectru de proiectare (Sd , q=6), P100-1 (2006).
După cum se poate observa din Figura 6.8 şi relaiile (6.14) şi (6.15), spectrul de proiectare se obine dinspectrul elastic prin reducerea acestuia cu factorul de comportare q, pentru valori ale perioadei T > T B. Pentruperioade T < T B, spectrul de proiectare este determinat pe baza unui factor de comportare redus fa ă devaloarea de bază q, acesta atingând valoarea q = 1 pentru T = 0. Acest model recunoaşte faptul că structurile

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 99/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
98
foarte rigide au cerine foarte ridicate de ductilitate, acestea necesitând o proiectare în domeniul elastic (vezişi seciunea 4.6.3).
6.3. Metode de calcul elastic
În proiectarea structurilor la aciunea seismică se pot folosi mai multe metode de analiză structurală. Înproiectarea curentă se foloseşte un calcul liniar elastic, fiind posibile două alternative: metoda de calcul cu fore laterale (metoda forelor statice echivalente) metoda de calcul modal cu spectre de răspuns (calcul spectral)
6.3.1. Metoda de calcul cu for e laterale
Această metodă se poate aplica construciilor care pot fi calculate prin considerarea a două modele plane,câte unul pentru fiecare direcie principală a clădirii, şi al căror răspuns seismic total nu este influenatsemnificativ de modurile proprii superioare de vibraie. În acest caz, modul propriu fundamental de vibraieare o contribuie predominantă asupra răspunsului seismic total. Aceste cerine pot fi considerate satisf ăcutede structurile care au perioada fundamentală de vibraie T 1 ≤ 1.5 sec, o înălime de până la 30 m şi suntregulate pe verticală.
Metoda de calcul cu fore laterale reprezintă un calcul spectral simplificat, care ia în considerare doar aportulmodului fundamental de vibraie la răspunsul structurii. Pe baza acestei simplificări, calculul spectral sereduce la un calcul static al structurii sub efectul unor fore laterale aplicate la nivelul maselor concentrate (lanivelul planşeelor). Forele laterale reprezintă forele statice echivalente descrise în seciunea 5.3.3.Determinarea forelor laterale se efectuează în două etape. În prima etapă se determină fora tăietoare debază, iar în cea de-a doua etapă aceasta se distribuie pe înălimea structurii conform modului fundamental.Rezultatele unui calcul cu fore laterale reprezintă valorile de vârf ale eforturilor şi deplasărilor structurii.
După cum s-a arătat în seciunea 5.3.2, fora tăietoare de bază se poate determina cu relaia (5.96):
*bn n n
V M A= (6.16)
unde *n
M este masa modală efectivă din modul propriu n, An este pseudo-acceleraia spectrală
corespunzătoare perioadei proprii de vibraie din modul n.
Formulând expresia (6.16) pentru modul fundamental de vibraie (n=1) şi folosind notaiile din P100-1(2006) (V b1 ≡ F b; A1 ≡ Sd (T 1);
*1 M ≡ mλ ), aceasta devine:
( )1b d F S T mλ = (6.17)
unde:F b fora tăietoare de bază corespunzătoare modului propriu fundamental, pentru fiecare direcie
orizontală principală considerată în calculul clădirii( )1T Sd ordonata spectrului de răspuns de proiectare corespunzătoare perioadei fundamentale T 1
T 1 perioada proprie fundamentală de vibraie a clădirii în planul ce conine direcia orizontală
considerată m masa totală a clădiriiλ factor de corecie care ine seama de contribuia modului propriu fundamental prin masa modală
efectivă asociată acestuia, ale cărui valori sunt:λ = 0.85 dacă T 1 ≤ T C şi clădirea are mai mult de două niveluri şiλ = 1.0 în celelalte situaii.
Expresiile forelor statice echivalente f in din modul propriu n, ale factorului de participare modală şi alemasei modale efective sunt date de relaiile (5.104), (5.81), respectiv (5.94). Acestea sunt reproduse mai jospentru comoditate:
in n i in n f m Aφ = Γ 1
2
1
N
i in
in N
i in
i
m
m
φ
φ
=
=
Γ =∑
∑
2
1*
2
1
N
i in
i
n N
i in
i
m
M
m
φ
φ
=
=
=∑
∑(6.18)
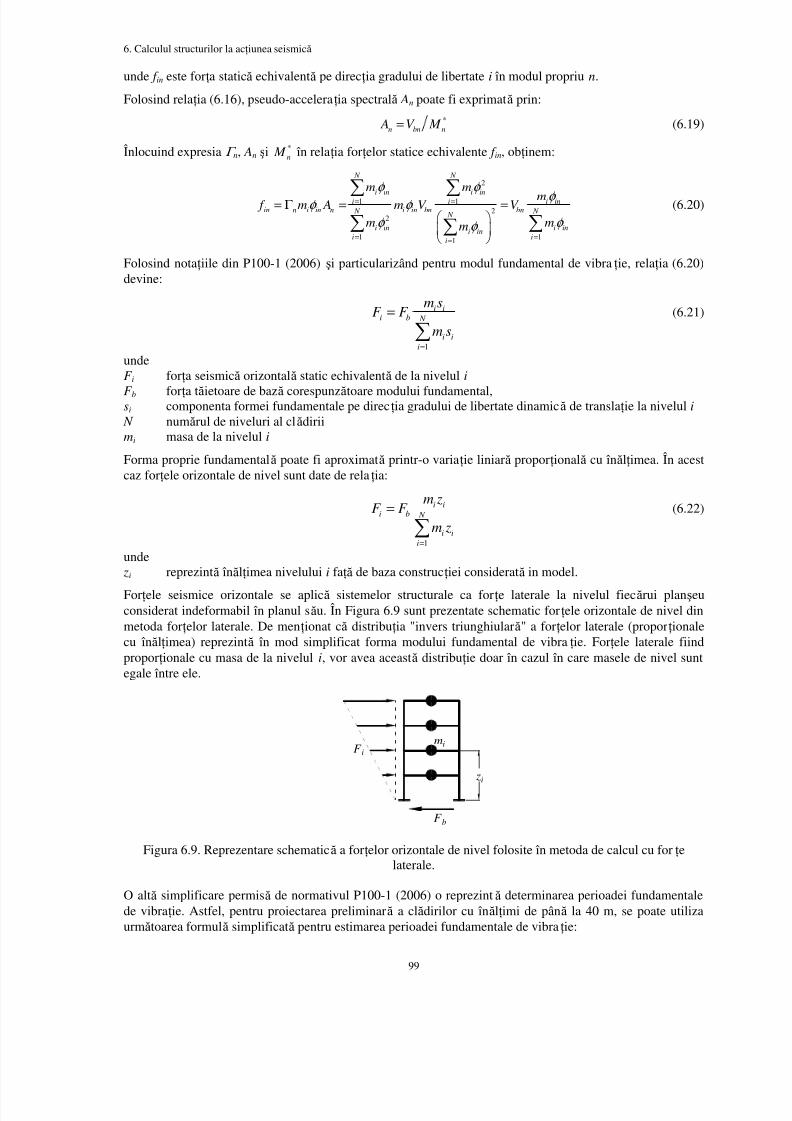
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 100/149
6. Calculul structurilor la aciunea seismică
99
unde f in este fora statică echivalentă pe direcia gradului de libertate i în modul propriu n.
Folosind relaia (6.16), pseudo-acceleraia spectrală An poate fi exprimată prin:
*n bn n
A V M = (6.19)
Înlocuind expresia Γ n, An şi*n
M în relaia forelor statice echivalente f in, obinem:
2
1 12
2
1 11
N N
i in i in
i i i inin n i in n i in bn bn N N
N
i in i ini in
i ii
m mm
f m A m V V
m mm
φ φ φ
φ φ
φ φ φ
= =
= ==
= Γ = =
∑ ∑
∑ ∑∑(6.20)
Folosind notaiile din P100-1 (2006) şi particularizând pentru modul fundamental de vibraie, relaia (6.20)devine:
1
i ii b N
i i
i
m sF F
m s=
=
∑(6.21)
undeF i fora seismică orizontală static echivalentă de la nivelul i F b fora tăietoare de bază corespunzătoare modului fundamental,si componenta formei fundamentale pe direcia gradului de libertate dinamică de translaie la nivelul i
N numărul de niveluri al clădiriimi masa de la nivelul i
Forma proprie fundamentală poate fi aproximată printr-o variaie liniară proporională cu înălimea. În acestcaz forele orizontale de nivel sunt date de relaia:
1
i ii b N
i ii
m zF F
m z=
=
∑
(6.22)
unde zi reprezintă înălimea nivelului i faă de baza construciei considerată in model.
Forele seismice orizontale se aplică sistemelor structurale ca fore laterale la nivelul fiecărui planşeuconsiderat indeformabil în planul său. În Figura 6.9 sunt prezentate schematic forele orizontale de nivel dinmetoda forelor laterale. De menionat că distribuia "invers triunghiulară" a forelor laterale (proporionalecu înălimea) reprezintă în mod simplificat forma modului fundamental de vibraie. Forele laterale fiindproporionale cu masa de la nivelul i, vor avea această distribuie doar în cazul în care masele de nivel suntegale între ele.
zi
miF i
F b
Figura 6.9. Reprezentare schematică a forelor orizontale de nivel folosite în metoda de calcul cu forelaterale.
O altă simplificare permisă de normativul P100-1 (2006) o reprezintă determinarea perioadei fundamentalede vibraie. Astfel, pentru proiectarea preliminară a clădirilor cu înălimi de până la 40 m, se poate utilizaurmătoarea formulă simplificată pentru estimarea perioadei fundamentale de vibraie:
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 101/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
100
431 H C T t = (6.23)
unde:T 1 este perioada fundamentală a clădirii, în secundeC t este un coeficient ale cărui valori sunt funcie de tipul structurii, după cum urmează:C t = 0.085 pentru cadre metalice (necontravântuite),C t = 0.075 pentru cadre din beton armat (necontravântuite) sau cadre metalice cu contravântuiri
excentrice,C t = 0.05 pentru celelalte tipuri de structuri. H înălimea clădirii, în metri, măsurată de la nivelul fundaiei sau de la extremitatea superioară a
infrastructurii rigide.
6.3.2. Metoda de calcul modal cu spectre de r ăspuns
Metoda de calcul modal cu spectre de răspuns descrisă în P100-1 (2006) este aceeaşi cu analiza spectrală descrisă în seciunea 5.3.3. Această metodă de calcul se aplică clădirilor care nu îndeplinesc condiiilespecificate pentru utilizarea metodei simplificate cu fore laterale static echivalente. Metoda de calcul modalcu spectre de răspuns se foloseşte în cazul structurilor cu forme complexe, sau cu distribuii neuniforme alemasei şi rigidităii, deoarece răspunsul unor astfel de sisteme este dat de aportul mai multor moduri proprii
de vibraie.În calcul se consideră modurile proprii cu o contribuie semnificativă la răspunsul seismic total. Această condiie este îndeplinită dacă: suma maselor modale efective pentru modurile proprii considerate reprezintă cel puin 90% din masa
totală a structurii, sau au fost considerate în calcul toate modurile proprii cu masă modală efectivă mai mare de 5% din masa
totală.
În cazul modelelor spaiale, condiiile de mai sus se verifică pentru fiecare direcie de calcul.
În cazul în care condiiile anterioare nu pot fi satisf ăcute pentru un număr suficient de mare de moduriproprii de vibraie (spre exemplu, la clădirile cu o contribuie semnificativă a modurilor de torsiune),
numărul minimr
de moduri proprii ce trebuie incluse într-un calcul spaial trebuie să satisfacă următoarelecondiii:
3r n≥ şi 0.05r c
T T ≤ (6.24)unde:r numărul minim de moduri proprii care trebuie consideraten numărul de niveluri deasupra terenuluiT r perioada proprie de vibraie a ultimului mod de vibraie considerat r
Metodele de combinare a răspunsurilor modale sunt cele amintite în seciunea 5.3.3. Răspunsurile modalepentru două moduri proprii de vibraie consecutive, k si k = 1 sunt considerate independente dacă perioadeleproprii de vibraie T k şi T k +1 (în care T k +1 ≤ T k ) satisfac următoarea condiie:
1 0.9k k T T + ≤ (6.25)Pentru două moduri proprii de vibraie independente se poate folosi metoda de combinare radical din sumapătratelor (RSP). În caz contrar se va folosi fie metoda de combinare suma valorilor absolute (ABS), fiecombinarea pătratică completă (CPC), vezi seciunea 5.3.3.
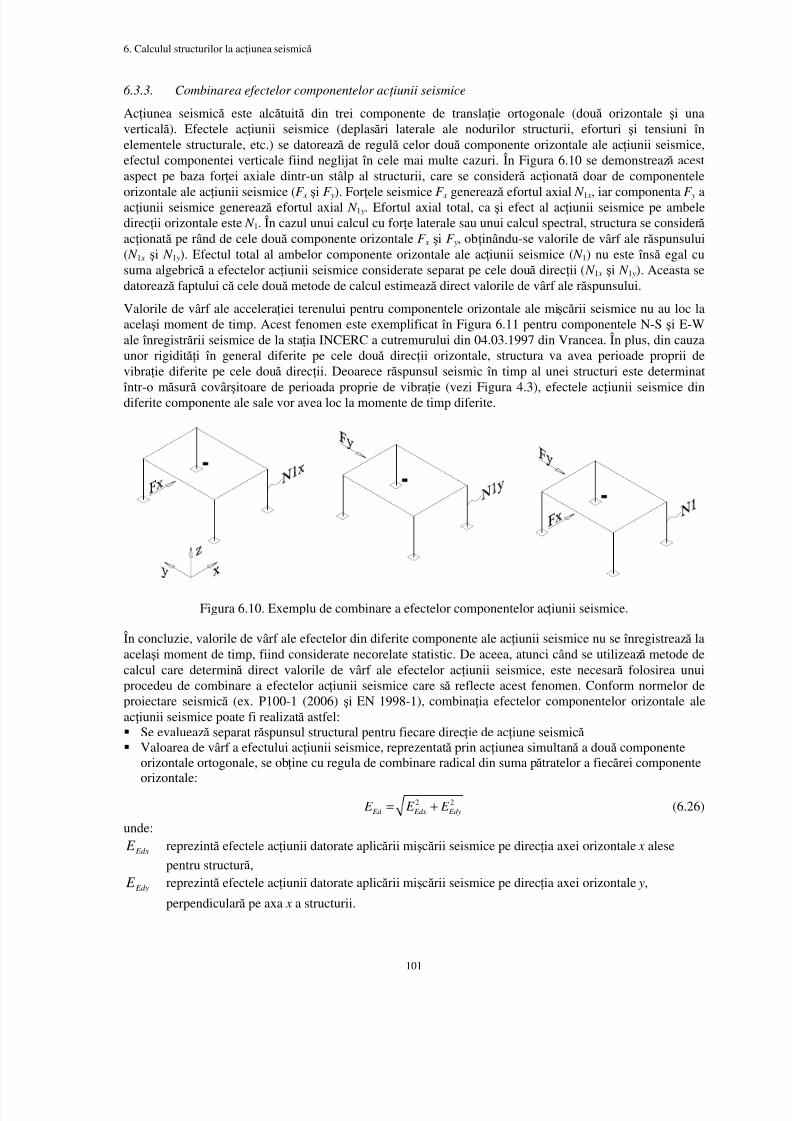
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 102/149
6. Calculul structurilor la aciunea seismică
101
6.3.3. Combinarea efectelor componentelor ac iunii seismice
Aciunea seismică este alcătuită din trei componente de translaie ortogonale (două orizontale şi unaverticală). Efectele aciunii seismice (deplasări laterale ale nodurilor structurii, eforturi şi tensiuni înelementele structurale, etc.) se datorează de regulă celor două componente orizontale ale aciunii seismice,efectul componentei verticale fiind neglijat în cele mai multe cazuri. În Figura 6.10 se demonstrează acest
aspect pe baza forei axiale dintr-un stâlp al structurii, care se consideră acionată doar de componenteleorizontale ale aciunii seismice (F x şi F y). Forele seismice F x generează efortul axial N 1 x, iar componenta F y aaciunii seismice generează efortul axial N 1 y. Efortul axial total, ca şi efect al aciunii seismice pe ambeledirecii orizontale este N 1. În cazul unui calcul cu fore laterale sau unui calcul spectral, structura se consideră acionată pe rând de cele două componente orizontale F x şi F y, obinându-se valorile de vârf ale răspunsului( N 1 x şi N 1 y). Efectul total al ambelor componente orizontale ale aciunii seismice ( N 1) nu este însă egal cusuma algebrică a efectelor aciunii seismice considerate separat pe cele două direcii ( N 1 x şi N 1 y). Aceasta sedatorează faptului că cele două metode de calcul estimează direct valorile de vârf ale răspunsului.
Valorile de vârf ale acceleraiei terenului pentru componentele orizontale ale mişcării seismice nu au loc laacelaşi moment de timp. Acest fenomen este exemplificat în Figura 6.11 pentru componentele N-S şi E-Wale înregistrării seismice de la staia INCERC a cutremurului din 04.03.1997 din Vrancea. În plus, din cauza
unor rigidităi în general diferite pe cele două direcii orizontale, structura va avea perioade proprii devibraie diferite pe cele două direcii. Deoarece răspunsul seismic în timp al unei structuri este determinat într-o măsură covârşitoare de perioada proprie de vibraie (vezi Figura 4.3), efectele aciunii seismice dindiferite componente ale sale vor avea loc la momente de timp diferite.
Figura 6.10. Exemplu de combinare a efectelor componentelor aciunii seismice.
În concluzie, valorile de vârf ale efectelor din diferite componente ale ac iunii seismice nu se înregistrează laacelaşi moment de timp, fiind considerate necorelate statistic. De aceea, atunci când se utilizează metode decalcul care determină direct valorile de vârf ale efectelor aciunii seismice, este necesară folosirea unuiprocedeu de combinare a efectelor aciunii seismice care să reflecte acest fenomen. Conform normelor deproiectare seismică (ex. P100-1 (2006) şi EN 1998-1), combinaia efectelor componentelor orizontale ale
aciunii seismice poate fi realizată astfel: Se evaluează separat răspunsul structural pentru fiecare direcie de aciune seismică Valoarea de vârf a efectului aciunii seismice, reprezentată prin aciunea simultană a două componente
orizontale ortogonale, se obine cu regula de combinare radical din suma pătratelor a fiecărei componenteorizontale:
2 2 Ed Edx Edy
E E E = + (6.26)
unde:
Edx E reprezintă efectele aciunii datorate aplicării mişcării seismice pe direcia axei orizontale x alese
pentru structură,
Edy E reprezintă efectele aciunii datorate aplicării mişcării seismice pe direcia axei orizontale y,
perpendiculară pe axa x a structurii.
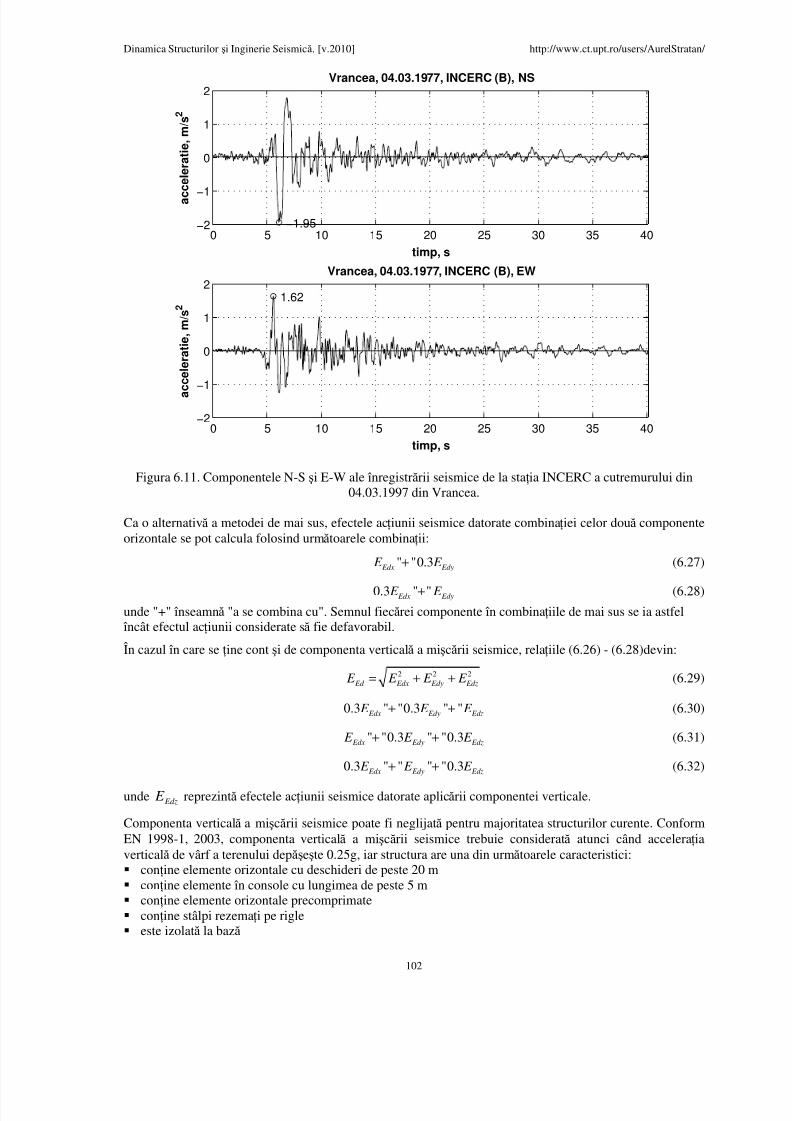
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 103/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
102
0 5 10 15 20 25 30 35 40−2
−1
0
1
2
−1.95
timp, s
a c c e l e r a t i e , m / s 2
Vrancea, 04.03.1977, INCERC (B), NS
0 5 10 15 20 25 30 35 40−2
−1
0
1
2
1.62
timp, s
a c c e l e r a
t i e , m / s 2
Vrancea, 04.03.1977, INCERC (B), EW
Figura 6.11. Componentele N-S şi E-W ale înregistrării seismice de la staia INCERC a cutremurului din04.03.1997 din Vrancea.
Ca o alternativă a metodei de mai sus, efectele aciunii seismice datorate combinaiei celor două componente
orizontale se pot calcula folosind următoarele combinaii:
" "0.3 Edx Edy E E + (6.27)
0.3 " " Edx Edy E E + (6.28)
unde "+" înseamnă "a se combina cu". Semnul fiecărei componente în combinaiile de mai sus se ia astfel încât efectul aciunii considerate să fie defavorabil.
În cazul în care se ine cont şi de componenta verticală a mişcării seismice, relaiile (6.26) - (6.28)devin:
2 2 2 Ed Edx Edy Edz
E E E E = + + (6.29)
0.3 " "0.3 " " Edx Edy Edz E E E + +
(6.30)" "0.3 " "0.3 Edx Edy Edz
E E E + + (6.31)
0.3 " " " "0.3 Edx Edy Edz E E E + + (6.32)
unde Edz E reprezintă efectele aciunii seismice datorate aplicării componentei verticale.
Componenta verticală a mişcării seismice poate fi neglijată pentru majoritatea structurilor curente. ConformEN 1998-1, 2003, componenta verticală a mişcării seismice trebuie considerată atunci când acceleraiaverticală de vârf a terenului depăşeşte 0.25g, iar structura are una din următoarele caracteristici: conine elemente orizontale cu deschideri de peste 20 m conine elemente în console cu lungimea de peste 5 m conine elemente orizontale precomprimate conine stâlpi rezemai pe rigle este izolată la bază
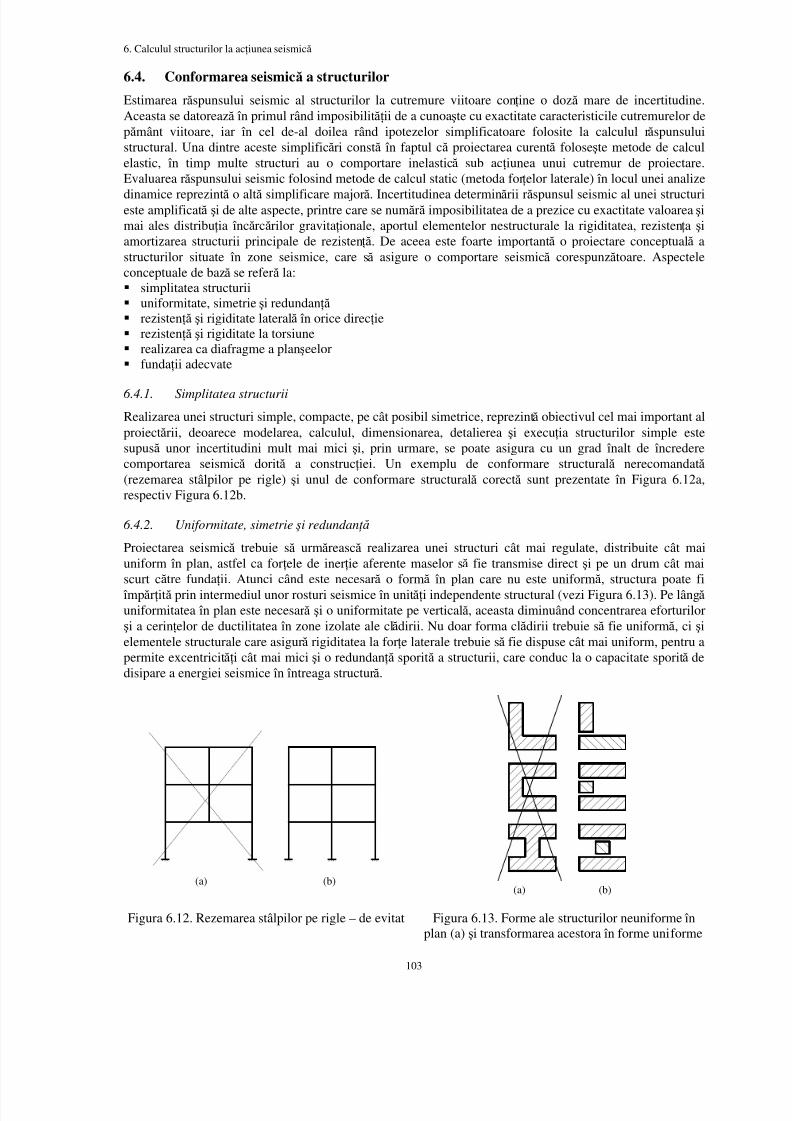
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 104/149
6. Calculul structurilor la aciunea seismică
103
6.4. Conformarea seismică a structurilor
Estimarea răspunsului seismic al structurilor la cutremure viitoare conine o doză mare de incertitudine.Aceasta se datorează în primul rând imposibilităii de a cunoaşte cu exactitate caracteristicile cutremurelor depământ viitoare, iar în cel de-al doilea rând ipotezelor simplificatoare folosite la calculul răspunsuluistructural. Una dintre aceste simplificări constă în faptul că proiectarea curentă foloseşte metode de calculelastic, în timp multe structuri au o comportare inelastică sub aciunea unui cutremur de proiectare.
Evaluarea răspunsului seismic folosind metode de calcul static (metoda forelor laterale) în locul unei analizedinamice reprezintă o altă simplificare majoră. Incertitudinea determinării răspunsul seismic al unei structurieste amplificată şi de alte aspecte, printre care se numără imposibilitatea de a prezice cu exactitate valoarea şimai ales distribuia încărcărilor gravitaionale, aportul elementelor nestructurale la rigiditatea, rezistena şiamortizarea structurii principale de rezistenă. De aceea este foarte importantă o proiectare conceptuală astructurilor situate în zone seismice, care să asigure o comportare seismică corespunzătoare. Aspecteleconceptuale de bază se referă la: simplitatea structurii uniformitate, simetrie şi redundană rezistenă şi rigiditate laterală în orice direcie rezistenă şi rigiditate la torsiune realizarea ca diafragme a planşeelor fundaii adecvate
6.4.1. Simplitatea structurii
Realizarea unei structuri simple, compacte, pe cât posibil simetrice, reprezintă obiectivul cel mai important alproiectării, deoarece modelarea, calculul, dimensionarea, detalierea şi execuia structurilor simple estesupusă unor incertitudini mult mai mici şi, prin urmare, se poate asigura cu un grad înalt de încrederecomportarea seismică dorită a construciei. Un exemplu de conformare structurală nerecomandată (rezemarea stâlpilor pe rigle) şi unul de conformare structurală corectă sunt prezentate în Figura 6.12a,respectiv Figura 6.12b.
6.4.2. Uniformitate, simetrie şi redundan ă
Proiectarea seismică trebuie să urmărească realizarea unei structuri cât mai regulate, distribuite cât maiuniform în plan, astfel ca forele de inerie aferente maselor să fie transmise direct şi pe un drum cât maiscurt către fundaii. Atunci când este necesară o formă în plan care nu este uniformă, structura poate fi
împărită prin intermediul unor rosturi seismice în unităi independente structural (vezi Figura 6.13). Pe lângă uniformitatea în plan este necesară şi o uniformitate pe verticală, aceasta diminuând concentrarea eforturilorşi a cerinelor de ductilitatea în zone izolate ale clădirii. Nu doar forma clădirii trebuie să fie uniformă, ci şielementele structurale care asigură rigiditatea la fore laterale trebuie să fie dispuse cât mai uniform, pentru apermite excentricităi cât mai mici şi o redundană sporită a structurii, care conduc la o capacitate sporită dedisipare a energiei seismice în întreaga structură.
(a) (b)
(a) (b)
Figura 6.12. Rezemarea stâlpilor pe rigle – de evitat Figura 6.13. Forme ale structurilor neuniforme înplan (a) şi transformarea acestora în forme uniforme
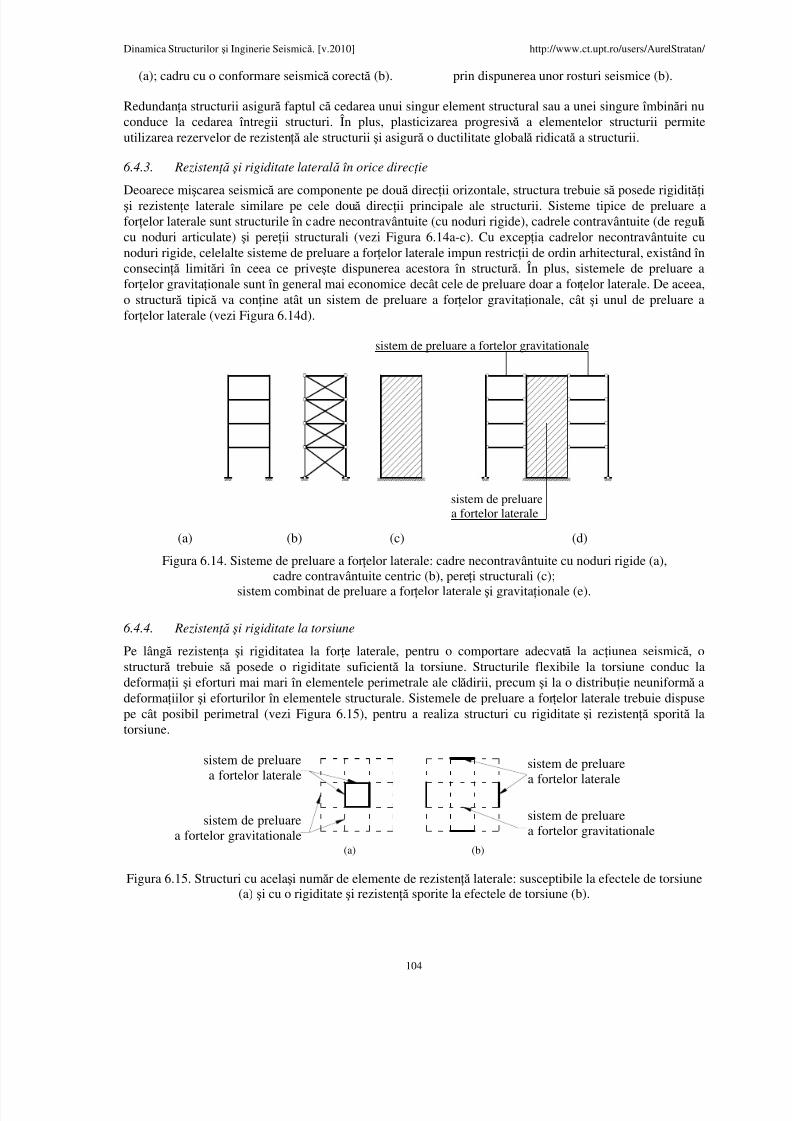
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 105/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
104
(a); cadru cu o conformare seismică corectă (b). prin dispunerea unor rosturi seismice (b).
Redundana structurii asigură faptul că cedarea unui singur element structural sau a unei singure îmbinări nuconduce la cedarea întregii structuri. În plus, plasticizarea progresivă a elementelor structurii permiteutilizarea rezervelor de rezistenă ale structurii şi asigură o ductilitate globală ridicată a structurii.
6.4.3. Rezisten ă şi rigiditate laterală în orice direc ie
Deoarece mişcarea seismică are componente pe două direcii orizontale, structura trebuie să posede rigidităişi rezistene laterale similare pe cele două direcii principale ale structurii. Sisteme tipice de preluare aforelor laterale sunt structurile în cadre necontravântuite (cu noduri rigide), cadrele contravântuite (de regulă cu noduri articulate) şi pereii structurali (vezi Figura 6.14a-c). Cu excepia cadrelor necontravântuite cunoduri rigide, celelalte sisteme de preluare a forelor laterale impun restricii de ordin arhitectural, existând înconsecină limitări în ceea ce priveşte dispunerea acestora în structură. În plus, sistemele de preluare aforelor gravitaionale sunt în general mai economice decât cele de preluare doar a forelor laterale. De aceea,o structură tipică va conine atât un sistem de preluare a forelor gravitaionale, cât şi unul de preluare aforelor laterale (vezi Figura 6.14d).
sistem de preluarea fortelor laterale
sistem de preluare a fortelor gravitationale
(a) (b) (c) (d)Figura 6.14. Sisteme de preluare a forelor laterale: cadre necontravântuite cu noduri rigide (a),
cadre contravântuite centric (b), perei structurali (c);sistem combinat de preluare a forelor laterale şi gravitaionale (e).
6.4.4. Rezisten ă şi rigiditate la torsiune
Pe lângă rezistena şi rigiditatea la fore laterale, pentru o comportare adecvată la aciunea seismică, ostructură trebuie să posede o rigiditate suficientă la torsiune. Structurile flexibile la torsiune conduc ladeformaii şi eforturi mai mari în elementele perimetrale ale clădirii, precum şi la o distribuie neuniformă adeformaiilor şi eforturilor în elementele structurale. Sistemele de preluare a forelor laterale trebuie dispuse
pe cât posibil perimetral (vezi Figura 6.15), pentru a realiza structuri cu rigiditate şi rezistenă sporită latorsiune.
sistem de preluarea fortelor laterale
sistem de preluarea fortelor laterale
sistem de preluarea fortelor gravitationale
sistem de preluarea fortelor gravitationale
(a) (b)
Figura 6.15. Structuri cu acelaşi număr de elemente de rezistenă laterale: susceptibile la efectele de torsiune
(a) şi cu o rigiditate şi rezistenă sporite la efectele de torsiune (b).
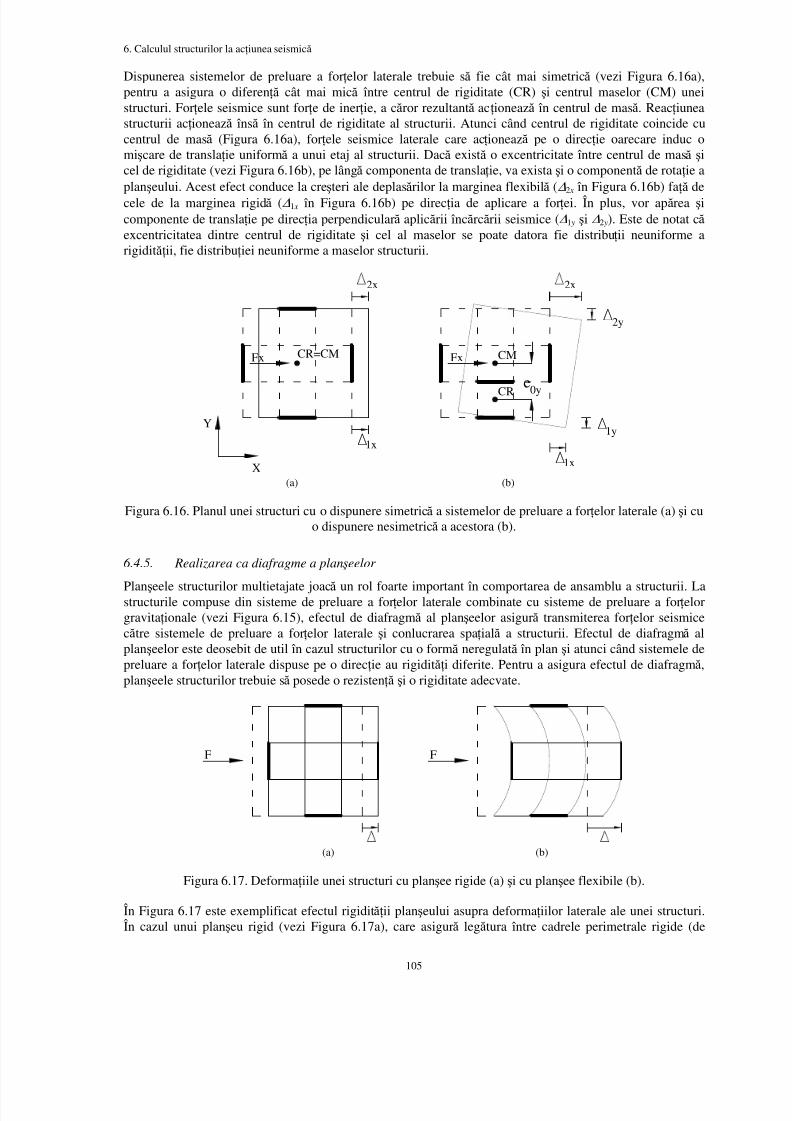
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 106/149
6. Calculul structurilor la aciunea seismică
105
Dispunerea sistemelor de preluare a forelor laterale trebuie să fie cât mai simetrică (vezi Figura 6.16a),pentru a asigura o diferenă cât mai mică între centrul de rigiditate (CR) şi centrul maselor (CM) uneistructuri. Forele seismice sunt fore de inerie, a căror rezultantă acionează în centrul de masă. Reaciuneastructurii acionează însă în centrul de rigiditate al structurii. Atunci când centrul de rigiditate coincide cucentrul de masă (Figura 6.16a), forele seismice laterale care acionează pe o direcie oarecare induc omişcare de translaie uniformă a unui etaj al structurii. Dacă există o excentricitate între centrul de masă şicel de rigiditate (vezi Figura 6.16b), pe lângă componenta de translaie, va exista şi o componentă de rotaie aplanşeului. Acest efect conduce la creşteri ale deplasărilor la marginea flexibilă (∆2 x în Figura 6.16b) faă decele de la marginea rigidă (∆1 x în Figura 6.16b) pe direcia de aplicare a forei. În plus, vor apărea şicomponente de translaie pe direcia perpendiculară aplicării încărcării seismice (∆1 y şi ∆2 y). Este de notat că excentricitatea dintre centrul de rigiditate şi cel al maselor se poate datora fie distribuii neuniforme arigidităii, fie distribuiei neuniforme a maselor structurii.
CR=CM CM
CR
X
Y
DDDD1x
2x
DDDD1x
2x
Fx Fx
DDDD1y
DDDD2y
e0y
(a) (b)
Figura 6.16. Planul unei structuri cu o dispunere simetrică a sistemelor de preluare a forelor laterale (a) şi cuo dispunere nesimetrică a acestora (b).
6.4.5. Realizarea ca diafragme a plan şeelor
Planşeele structurilor multietajate joacă un rol foarte important în comportarea de ansamblu a structurii. Lastructurile compuse din sisteme de preluare a forelor laterale combinate cu sisteme de preluare a forelorgravitaionale (vezi Figura 6.15), efectul de diafragmă al planşeelor asigură transmiterea forelor seismicecătre sistemele de preluare a forelor laterale şi conlucrarea spaială a structurii. Efectul de diafragmă alplanşeelor este deosebit de util în cazul structurilor cu o formă neregulată în plan şi atunci când sistemele depreluare a forelor laterale dispuse pe o direcie au rigidităi diferite. Pentru a asigura efectul de diafragmă,planşeele structurilor trebuie să posede o rezistenă şi o rigiditate adecvate.
F F
(a) (b)
Figura 6.17. Deformaiile unei structuri cu planşee rigide (a) şi cu planşee flexibile (b).
În Figura 6.17 este exemplificat efectul rigidităii planşeului asupra deformaiilor laterale ale unei structuri.În cazul unui planşeu rigid (vezi Figura 6.17a), care asigură legătura între cadrele perimetrale rigide (de
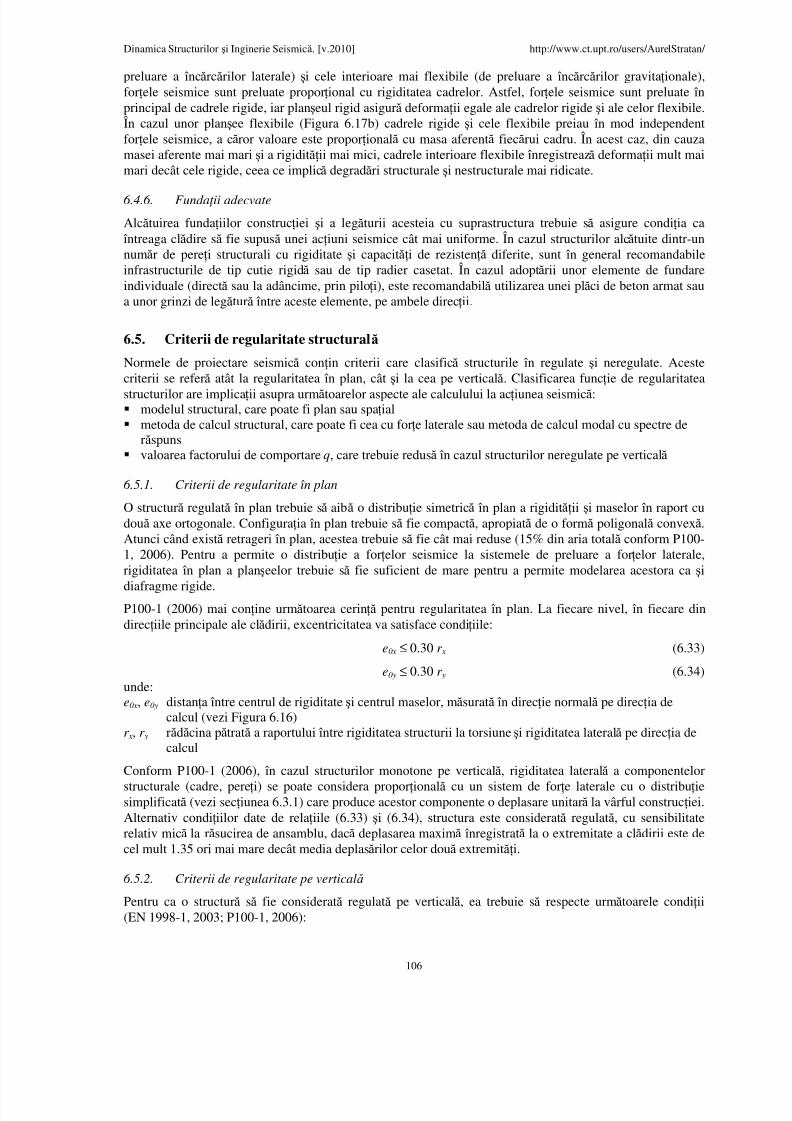
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 107/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
106
preluare a încărcărilor laterale) şi cele interioare mai flexibile (de preluare a încărcărilor gravitaionale),forele seismice sunt preluate proporional cu rigiditatea cadrelor. Astfel, forele seismice sunt preluate înprincipal de cadrele rigide, iar planşeul rigid asigură deformaii egale ale cadrelor rigide şi ale celor flexibile.În cazul unor planşee flexibile (Figura 6.17b) cadrele rigide şi cele flexibile preiau în mod independentforele seismice, a căror valoare este proporională cu masa aferentă fiecărui cadru. În acest caz, din cauzamasei aferente mai mari şi a rigidităii mai mici, cadrele interioare flexibile înregistrează deformaii mult maimari decât cele rigide, ceea ce implică degradări structurale şi nestructurale mai ridicate.
6.4.6. Funda ii adecvate
Alcătuirea fundaiilor construciei şi a legăturii acesteia cu suprastructura trebuie să asigure condiia ca întreaga clădire să fie supusă unei aciuni seismice cât mai uniforme. În cazul structurilor alcătuite dintr-unnumăr de perei structurali cu rigiditate şi capacităi de rezistenă diferite, sunt în general recomandabileinfrastructurile de tip cutie rigidă sau de tip radier casetat. În cazul adoptării unor elemente de fundareindividuale (directă sau la adâncime, prin piloi), este recomandabilă utilizarea unei plăci de beton armat saua unor grinzi de legătură între aceste elemente, pe ambele direcii.
6.5. Criterii de regularitate structurală
Normele de proiectare seismică conin criterii care clasifică structurile în regulate şi neregulate. Acestecriterii se referă atât la regularitatea în plan, cât şi la cea pe verticală. Clasificarea funcie de regularitateastructurilor are implicaii asupra următoarelor aspecte ale calculului la aciunea seismică: modelul structural, care poate fi plan sau spaial metoda de calcul structural, care poate fi cea cu fore laterale sau metoda de calcul modal cu spectre de
răspuns valoarea factorului de comportare q, care trebuie redusă în cazul structurilor neregulate pe verticală
6.5.1. Criterii de regularitate în plan
O structură regulată în plan trebuie să aibă o distribuie simetrică în plan a rigidităii şi maselor în raport cudouă axe ortogonale. Configuraia în plan trebuie să fie compactă, apropiată de o formă poligonală convexă.
Atunci când există retrageri în plan, acestea trebuie să fie cât mai reduse (15% din aria totală conform P100-1, 2006). Pentru a permite o distribuie a forelor seismice la sistemele de preluare a forelor laterale,rigiditatea în plan a planşeelor trebuie să fie suficient de mare pentru a permite modelarea acestora ca şidiafragme rigide.
P100-1 (2006) mai conine următoarea cerină pentru regularitatea în plan. La fiecare nivel, în fiecare dindireciile principale ale clădirii, excentricitatea va satisface condiiile:
e0x ≤ 0.30 r x (6.33)
e0y ≤ 0.30 r y (6.34)unde:e0x, e0y distana între centrul de rigiditate şi centrul maselor, măsurată în direcie normală pe direcia de
calcul (vezi Figura 6.16)r x, r y rădăcina pătrată a raportului între rigiditatea structurii la torsiune şi rigiditatea laterală pe direcia de
calcul
Conform P100-1 (2006), în cazul structurilor monotone pe verticală, rigiditatea laterală a componentelorstructurale (cadre, perei) se poate considera proporională cu un sistem de fore laterale cu o distribuiesimplificată (vezi seciunea 6.3.1) care produce acestor componente o deplasare unitară la vârful construciei.Alternativ condiiilor date de relaiile (6.33) şi (6.34), structura este considerată regulată, cu sensibilitaterelativ mică la răsucirea de ansamblu, dacă deplasarea maximă înregistrată la o extremitate a clădirii este decel mult 1.35 ori mai mare decât media deplasărilor celor două extremităi.
6.5.2. Criterii de regularitate pe verticală
Pentru ca o structură să fie considerată regulată pe verticală, ea trebuie să respecte următoarele condiii(EN 1998-1, 2003; P100-1, 2006):
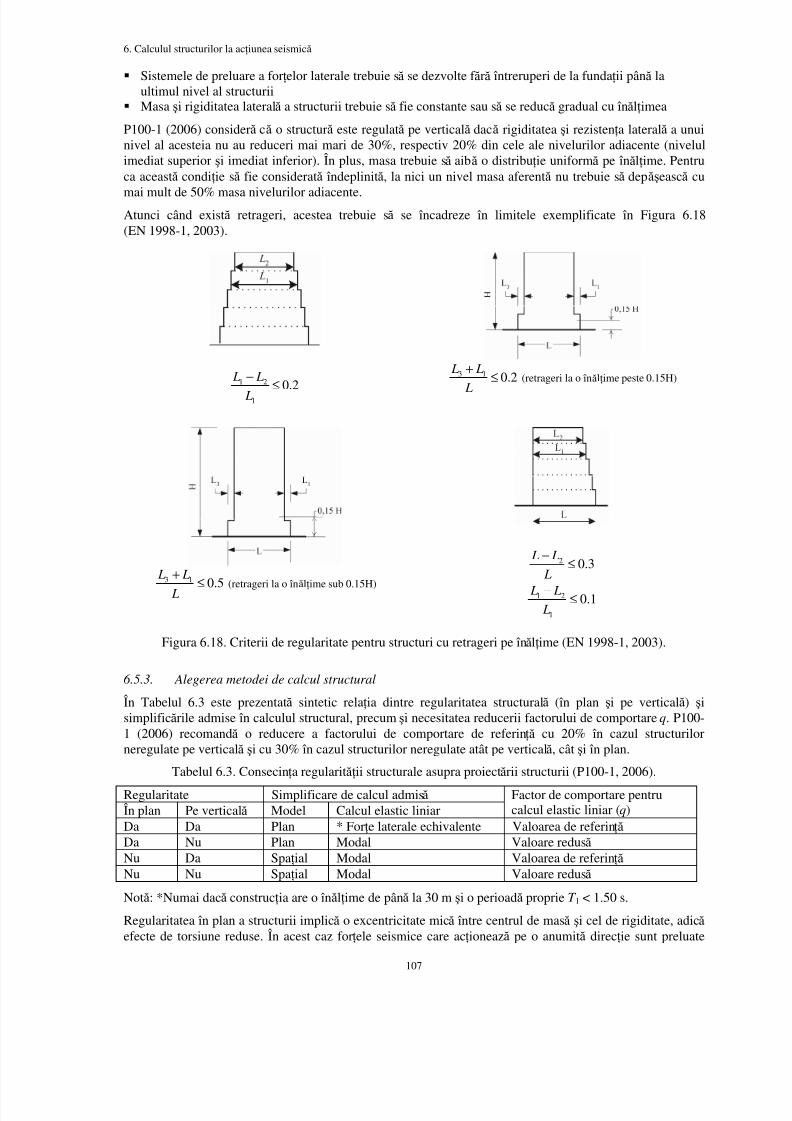
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 108/149
6. Calculul structurilor la aciunea seismică
107
Sistemele de preluare a forelor laterale trebuie să se dezvolte f ără întreruperi de la fundaii până laultimul nivel al structurii
Masa şi rigiditatea laterală a structurii trebuie să fie constante sau să se reducă gradual cu înălimea
P100-1 (2006) consideră că o structură este regulată pe verticală dacă rigiditatea şi rezistena laterală a unuinivel al acesteia nu au reduceri mai mari de 30%, respectiv 20% din cele ale nivelurilor adiacente (nivelulimediat superior şi imediat inferior). În plus, masa trebuie să aibă o distribuie uniformă pe înălime. Pentru
ca această condiie să fie considerată îndeplinită, la nici un nivel masa aferentă nu trebuie să depăşească cumai mult de 50% masa nivelurilor adiacente.
Atunci când există retrageri, acestea trebuie să se încadreze în limitele exemplificate în Figura 6.18(EN 1998-1, 2003).
1 2
1
0.2 L L
L
−≤
3 1 0.2 L L
L
+≤ (retrageri la o înălime peste 0.15H)
3 1 0.5 L L
L
+≤ (retrageri la o înălime sub 0.15H)
2 0.3 L L
L
−≤
1 2
1
0.1 L L
L
−≤
Figura 6.18. Criterii de regularitate pentru structuri cu retrageri pe înălime (EN 1998-1, 2003).
6.5.3. Alegerea metodei de calcul structural
În Tabelul 6.3 este prezentată sintetic relaia dintre regularitatea structurală (în plan şi pe verticală) şi
simplificările admise în calculul structural, precum şi necesitatea reducerii factorului de comportare q. P100-1 (2006) recomandă o reducere a factorului de comportare de referină cu 20% în cazul structurilorneregulate pe verticală şi cu 30% în cazul structurilor neregulate atât pe verticală, cât şi în plan.
Tabelul 6.3. Consecina regularităii structurale asupra proiectării structurii (P100-1, 2006).
Regularitate Simplificare de calcul admisă În plan Pe verticală Model Calcul elastic liniar
Factor de comportare pentrucalcul elastic liniar (q)
Da Da Plan * Fore laterale echivalente Valoarea de referină Da Nu Plan Modal Valoare redusă Nu Da Spaial Modal Valoarea de referină Nu Nu Spaial Modal Valoare redusă
Notă: *Numai dacă construcia are o înălime de până la 30 m şi o perioadă proprie T 1 < 1.50 s.
Regularitatea în plan a structurii implică o excentricitate mică între centrul de masă şi cel de rigiditate, adică efecte de torsiune reduse. În acest caz forele seismice care acionează pe o anumită direcie sunt preluate

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 109/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
108
doar de sistemele de rezistenă dispuse pe aceeaşi direcie, care se încarcă în mod egal (vezi Figura 6.16a).Aceasta permite analiza fiecărui sistem de preluare a forelor laterale în parte, adică folosirea unui modelplan. La rândul său, o structură reprezentată de o schemă structurală plană, care este regulată pe verticală, areperioada fundamentală T 1 < 1.50 s şi o înălime sub 30 m, răspunde preponderent în primul mod propriu devibraie şi, de aceea, poate fi analizată folosind metoda forelor laterale. Dacă o structură este regulată înplan, dar nu şi pe verticală, modelul plan mai este posibil, dar răspunsul total al acestuia are contribuiisemnificative din modurile superioare de vibraie. De aceea, astfel de structuri pot fi analizate folosindmodele plane, dar utilizând o analiză modală cu spectre de răspuns.
Structurile care nu sunt regulate în plan implică efecte de torsiune importante şi, în consecină, sistemelestructurale de preluare a forelor laterale dispuse pe direcia considerată a forelor seismice se încarcă în modneuniform. În plus, componenta aciunii seismice care acionează după o anumită direcie va solicita şisistemele de rezistenă dispuse perpendicular pe aceasta (vezi Figura 6.16b). În aceste condiii, este dificilă determinarea aportului diverselor sisteme de rezistenă la preluarea încărcării seismice dacă se folosescmodele plane. Soluia cea mai simplă de determinare a răspunsului structural o constituie, în acest caz,utilizarea unui model spaial al structurii şi un calcul modal cu spectre de răspuns.
Factorul de comportare q reflectă capacitatea de deformare în domeniul inelastic, precum şi redundana şisuprarezistena structurii. Valoarea de referină a acestui factor este specificată în normele de calcul seismic
funcie de tipul structurii, materialul din care este realizată aceasta şi clasa de ductilitate. Structurile care nusunt regulate pe verticală sunt susceptibile de concentrări ale deformaiilor plastice în anumite pări alestructurii (o distribuie neuniformă a cerinei de ductilitate), ceea ce este echivalent cu o ductilitate redusă peansamblul structurii. Acest fapt implică necesitatea folosirii un factor de comportare q redus faă de valoareade referină.
6.6. Modelul structural
Pentru determinarea forelor seismice se folosesc modele structurale care trebuie să reprezinte într-un modadecvat distribuia de rigiditate şi mase în structură. Atunci când se foloseşte o analiză inelastică, modelulstructural trebuie să conină şi modelarea rezistenei elementelor structurale. În general, structura poate fi
considerată ca fiind alcătuită din sisteme de preluare a forelor gravitaionale şi sisteme de preluare a forelorlaterale, conectate la nivelul planşeelor.
Atunci când planşeele nu pot fi considerate infinit rigide în planul lor (de exemplu cazul planşeelor din lemn,sau a celor din beton armat cu goluri de dimensiuni mari), masele distribuite în structură pot fi considerateconcentrate în nodurile structurii, conform suprafeei aferente (vezi seciunea 5.1.3 şi Figura 6.19a). În astfelde cazuri se pot neglija componentele de rotire ale maselor, în calculul structural considerându-se doarcomponentele de translaie. Astfel, pentru un model spaial, în fiecare nod al structurii se consideră concentrate componentele de translaie după cele două direcii orizontale.
În cazul în care planşeele pot fi considerare infinit rigide în planul lor (de exemplu în cazul planşeelor dinbeton armat, cu o formă regulată şi goluri de dimensiuni mici), masele aferente unui nivel pot fi concentrate
în centrul de masă al acelui nivel. Masele concentrate vor avea componente după direciile gradelor de
libertate ale diafragmelor rigide (două translaii în plan orizontal şi o rotire faă de axa verticală, veziseciunea 5.1.3 şi Figura 6.19b). Componentele de translaie ale masei se determină însumând toate maseleaferente nivelului respectiv:
x y i M M m= =∑ (6.35)
Componenta de rotire a masei de nivel M zz poartă denumirea de moment de inerie al masei şi se poatedetermina conform relaiei:
2 zz i i
M m d =∑ (6.36)
unde d i este distana de la centrul de masă la masa discretă mi (vezi Figura 6.19c). În cazul unei masedistribuite uniform pe o suprafaă, momentul de inerie al masei se calculează ca şi produsul dintre momentulde inerie polar şi valoarea masei uniform distribuită pe suprafaă.

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 110/149
6. Calculul structurilor la aciunea seismică
109
X
YCM
yi
mxi My
Mx
Mzz
mi d i
(a) (b) (c)
Figura 6.19. Concentrarea maselor în noduri la planşee flexibile (a); concentrarea masei în centrul de masă încazul unor diafragme rigide (b); masa mi şi distana d i pentru calcul momentului de inerie al masei (c).
În cazul structurilor din beton armat, compuse oel-beton şi din zidărie, care sunt proiectate să răspundă îndomeniul inelastic în timpul unui cutremur de calcul, rigiditatea elementelor structurale trebuie redusă pentrua reflecta fisurarea betonului sau zidăriei.
Deformabilitatea fundaiei şi/sau deformabilitatea terenului trebuie luate în considerare, dacă acestea au oinfluenă semnificativă asupra răspunsului structural.
6.7. Efectele de torsiune accidentală
În cazul construciilor cu planşee indeformabile în planul lor, efectele generate de incertitudinile asociatedistribuiei maselor de nivel şi/sau variaiei spaiale a mişcării seismice a terenului se consideră prinintroducerea unei excentricităi accidentale adiionale. Aceasta trebuie luată în calcul pentru fiecare direcieprincipală a structurii şi pentru fiecare nivel, şi se raportează la centrul maselor. Excentricitatea accidentală se calculează cu expresia (vezi Figura 6.20):
e1i = ±0.05 Li (6.37)unde:e1i excentricitatea accidentală a masei de la nivelul i faă de poziia calculată a centrului maselor,
aplicată pe aceeaşi direcie la toate nivelurile Li dimensiunea planşeului perpendiculară pe direcia aciunii seismice.
CMFx ±e1yLy
CM
Fy
±e1x
Lx
X
Y
Figura 6.20. Definiia excentricităii accidentale.
În cazul în care pentru obinerea răspunsului seismic se utilizează un model spaial, efectul de torsiuneprodus de o excentricitate accidentală se poate considera prin introducerea la fiecare nivel a unui moment detorsiune:
iii F e M 11 = (6.38)
în care: M 1i moment de torsiune aplicat la nivelul i în jurul axei sale verticalee1i excentricitate accidentală a masei de la nivelul i conform relaieiF i fora seismică orizontală aplicată la nivelul i
Momentul de torsiune se va calcula pentru toate direciile şi sensurile considerate în calcul.
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 111/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
110
6.8. Clase de importană şi de expunere
Funcie de destinaia construciilor, diferite structuri necesită diferite niveluri de sigurană. Importanaconstruciilor depinde de consecinele prăbuşirii asupra vieii oamenilor, de rolul lor în sigurana publică şiprotecia civilă în perioada imediat următoare cutremurului şi de consecinele sociale şi economice aleprăbuşirii sau avarierii grave. P100-1 (2006) specifică nivelul necesar al siguranei prin clasificareastructurilor în diferite clase de importană şi de expunere la cutremur. Fiecărei clase de importană i se
atribuie un factor de importană γ I (vezi Tabelul 6.4). Diferitele niveluri de sigurană se obin multiplicândparametrii aciunii seismice de referină cu factorul de importană.
Tabelul 6.4. Clase de importană şi de expunere la cutremur pentru clădiri (P100-1, 2006).
Clasa deimportană
Tipuri de clădiri γ I
I
Clădiri cu funciuni eseniale, a căror integritate pe durata cutremurelor este vitală pentru protecia civilă: staiile de pompieri şi sediile poliiei; spitale şi alte construciiaferente serviciilor sanitare care sunt dotate cu secii de chirurgie şi de urgenă; clădirileinstituiilor cu responsabilitate în gestionarea situaiilor de urgenă, în apărarea şisecuritatea naională; staiile de producere şi distribuie a energiei şi/sau care asigură servicii eseniale pentru celelalte categorii de clădiri menionate aici; garajele devehicule ale serviciilor de urgenă de diferite categorii; rezervoare de apă şi staii depompare eseniale pentru situaii de urgenă; clădiri care conin gaze toxice, explozivi şialte substane periculoase.
1.4
II
Clădiri a căror rezistenă seismică este importantă sub aspectul consecinelor asociate cuprăbuşirea sau avarierea gravă: clădiri de locuit şi clădiri publice având peste 400 persoane în aria totală expusă spitale, altele decât cele din clasa I, şi instituii medicale cu o capacitate de peste 150
persoane în aria totală expusă penitenciare aziluri de bătrâni, creşe şcoli cu diferite grade, cu o capacitate de peste 200 de persoane în aria totală expusă auditorii, săli de conferine, de spectacole cu capacităi de peste 200 de persoane clădirile din patrimoniul naional, muzee etc.
1.2
III Clădiri de tip curent, care nu aparin celorlalte categorii 1.0
IVClădiri de mică importană pentru sigurana publică, cu grad redus de ocupare şi/sau demică importană economică, construcii agricole
0.8
6.9. Combinarea aciunii seismice cu alte tipuri de aciuni
Combinaiile de încărcări pentru verificarea structurilor se întocmesc conform CR0-2005. În cazul aciuniiseismice, combinaia de încărcări pentru verificarea la starea limită ultimă se determină conform relaiei:
, 2, ,1 1
N N
k j I Ek i k i
j i
G A Qγ ψ = =
+ +∑ ∑ (6.39)
unde:Gk,j valoarea caracteristică a aciunii permanente j Qk,i valoarea caracteristică a aciunii variabile i
Aek valoarea caracteristică a aciunii seismice ce corespunde intervalului mediu de recurenă corespunzător SLU (IMR=100 în P100-1, 2006)
ψ 2,i coeficient pentru determinarea valorii cvasipermanente a aciunii variabile Qi, vezi Tabelul 6.5γ I coeficient de importană (vezi Tabelul 6.4)
În combinaia de încărcări pentru verificarea la SLU, încărcările permanente sunt introduse cu valoarea lorcaracteristică. Încărcările variabile sunt considerate doar cu fraciunea cvasipermanentă din încărcareacaracteristică. Această abordare reflectă probabilitatea mai mică de producere a unui cutremur cu IMR
corespunzător SLU concomitent cu atingerea valorii maxime a încărcării variabile. Aciunile variabile carese consideră în combinaia seismică sunt cele din zăpadă şi cele datorate exploatării. Încărcările variabile dinvânt şi din variaii de temperatură nu se combină cu aciunea seismică (ψ 2,i = 0 în acest caz).
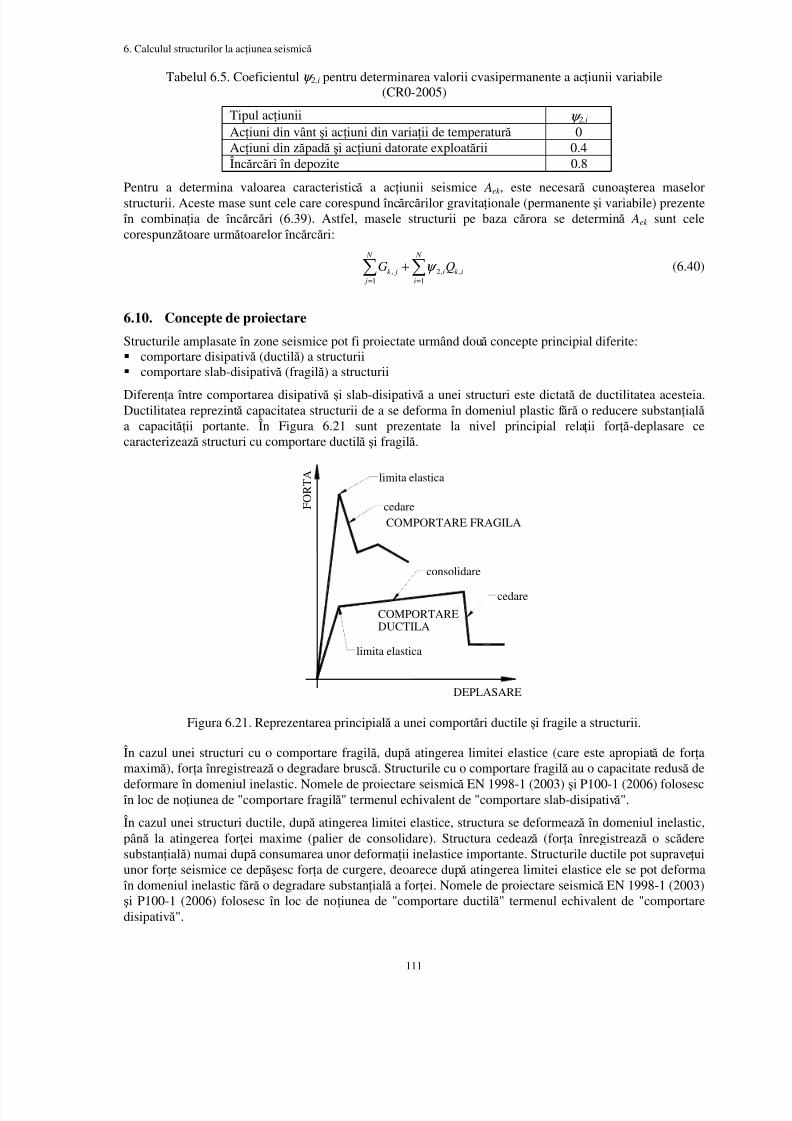
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 112/149
6. Calculul structurilor la aciunea seismică
111
Tabelul 6.5. Coeficientul ψ 2,i pentru determinarea valorii cvasipermanente a aciunii variabile(CR0-2005)
Tipul aciunii ψ 2,i Aciuni din vânt şi aciuni din variaii de temperatură 0Aciuni din zăpadă şi aciuni datorate exploatării 0.4Încărcări în depozite 0.8
Pentru a determina valoarea caracteristică a aciunii seismice Aek , este necesară cunoaşterea maselorstructurii. Aceste mase sunt cele care corespund încărcărilor gravitaionale (permanente şi variabile) prezente
în combinaia de încărcări (6.39). Astfel, masele structurii pe baza cărora se determină Aek sunt celecorespunzătoare următoarelor încărcări:
, 2, ,1 1
N N
k j i k i
j i
G Qψ = =
+∑ ∑ (6.40)
6.10. Concepte de proiectare
Structurile amplasate în zone seismice pot fi proiectate urmând două concepte principial diferite: comportare disipativă (ductilă) a structurii comportare slab-disipativă (fragilă) a structurii
Diferena între comportarea disipativă şi slab-disipativă a unei structuri este dictată de ductilitatea acesteia.Ductilitatea reprezintă capacitatea structurii de a se deforma în domeniul plastic f ără o reducere substanială a capacităii portante. În Figura 6.21 sunt prezentate la nivel principial relaii foră-deplasare cecaracterizează structuri cu comportare ductilă şi fragilă.
DEPLASARE
F O R T A
COMPORTARE FRAGILA
COMPORTARE
limita elastica
cedare
limita elastica
consolidare
cedare
DUCTILA
Figura 6.21. Reprezentarea principială a unei comportări ductile şi fragile a structurii.
În cazul unei structuri cu o comportare fragilă, după atingerea limitei elastice (care este apropiată de foramaximă), fora înregistrează o degradare bruscă. Structurile cu o comportare fragilă au o capacitate redusă dedeformare în domeniul inelastic. Nomele de proiectare seismică EN 1998-1 (2003) şi P100-1 (2006) folosesc
în loc de noiunea de "comportare fragilă" termenul echivalent de "comportare slab-disipativă".
În cazul unei structuri ductile, după atingerea limitei elastice, structura se deformează în domeniul inelastic,până la atingerea forei maxime (palier de consolidare). Structura cedează (fora înregistrează o scăderesubstanială) numai după consumarea unor deformaii inelastice importante. Structurile ductile pot supraveuiunor fore seismice ce depăşesc fora de curgere, deoarece după atingerea limitei elastice ele se pot deforma
în domeniul inelastic f ără
o degradare substanial
ăa for
ei. Nomele de proiectare seismic
ăEN 1998-1 (2003)
şi P100-1 (2006) folosesc în loc de noiunea de "comportare ductilă" termenul echivalent de "comportaredisipativă".
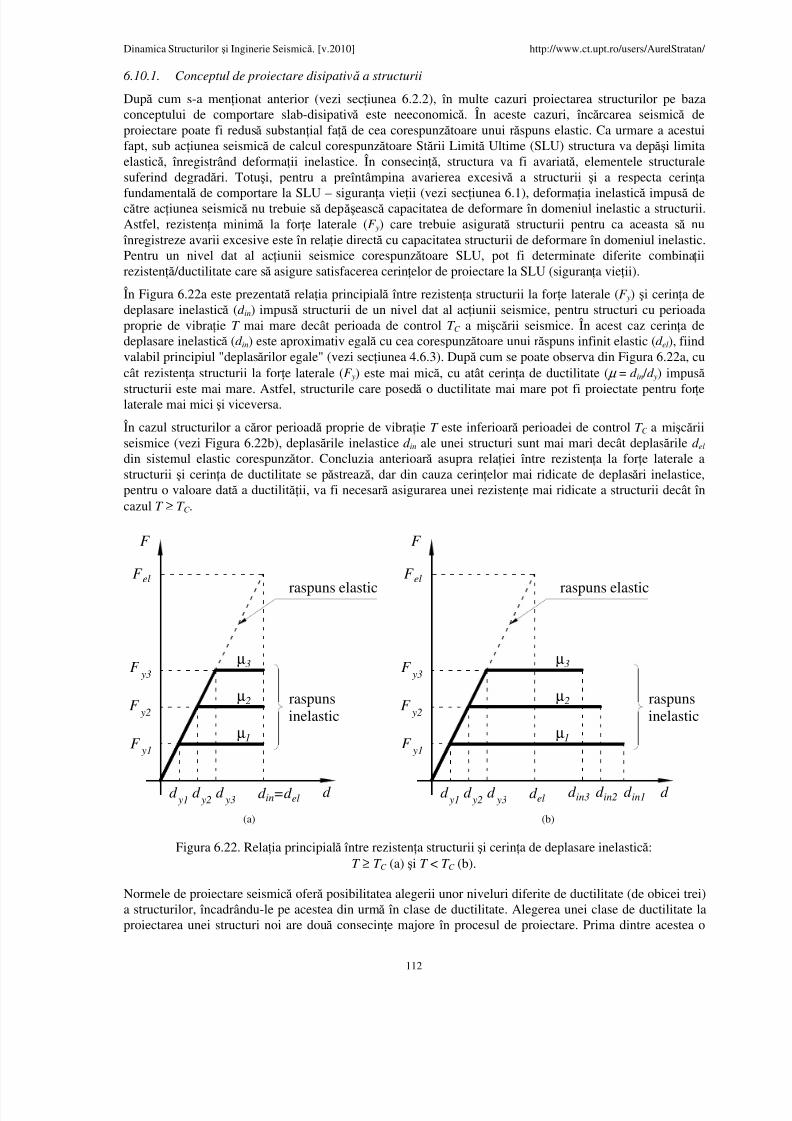
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 113/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
112
6.10.1. Conceptul de proiectare disipativă a structurii
După cum s-a menionat anterior (vezi seciunea 6.2.2), în multe cazuri proiectarea structurilor pe bazaconceptului de comportare slab-disipativă este neeconomică. În aceste cazuri, încărcarea seismică deproiectare poate fi redusă substanial faă de cea corespunzătoare unui răspuns elastic. Ca urmare a acestuifapt, sub aciunea seismică de calcul corespunzătoare Stării Limită Ultime (SLU) structura va depăşi limitaelastică, înregistrând deformaii inelastice. În consecină, structura va fi avariată, elementele structurale
suferind degradări. Totuşi, pentru a preîntâmpina avarierea excesivă a structurii şi a respecta cerinafundamentală de comportare la SLU – sigurana vieii (vezi seciunea 6.1), deformaia inelastică impusă decătre aciunea seismică nu trebuie să depăşească capacitatea de deformare în domeniul inelastic a structurii.Astfel, rezistena minimă la fore laterale (F y) care trebuie asigurată structurii pentru ca aceasta să nu
înregistreze avarii excesive este în relaie directă cu capacitatea structurii de deformare în domeniul inelastic.Pentru un nivel dat al aciunii seismice corespunzătoare SLU, pot fi determinate diferite combinaiirezistenă /ductilitate care să asigure satisfacerea cerinelor de proiectare la SLU (sigurana vieii).
În Figura 6.22a este prezentată relaia principială între rezistena structurii la fore laterale (F y) şi cerina dedeplasare inelastică (d in) impusă structurii de un nivel dat al aciunii seismice, pentru structuri cu perioadaproprie de vibraie T mai mare decât perioada de control T C a mişcării seismice. În acest caz cerina dedeplasare inelastică (d in) este aproximativ egală cu cea corespunzătoare unui răspuns infinit elastic (d el), fiind
valabil principiul "deplasărilor egale" (vezi seciunea 4.6.3). După cum se poate observa din Figura 6.22a, cucât rezistena structurii la fore laterale (F y) este mai mică, cu atât cerina de ductilitate ( µ = d in / d y) impusă structurii este mai mare. Astfel, structurile care posedă o ductilitate mai mare pot fi proiectate pentru forelaterale mai mici şi viceversa.
În cazul structurilor a căror perioadă proprie de vibraie T este inferioară perioadei de control T C a mişcăriiseismice (vezi Figura 6.22b), deplasările inelastice d in ale unei structuri sunt mai mari decât deplasările d el din sistemul elastic corespunzător. Concluzia anterioară asupra relaiei între rezistena la fore laterale astructurii şi cerina de ductilitate se păstrează, dar din cauza cerinelor mai ridicate de deplasări inelastice,pentru o valoare dată a ductilităii, va fi necesară asigurarea unei rezistene mai ridicate a structurii decât încazul T ≥ T C .
d in=d el
raspuns elastic
F y2
F el
F
d
F y3
F y1
d y1
µ2
µ3
µ1
d y2
d y3
raspuns
inelastic
raspuns elastic
F y2
F
d
F y3
F y1
d y1
µ2
µ3
µ1
d y2
d y3
raspuns
inelastic
d in3 d in2 d in1
F el
d el
(a) (b)
Figura 6.22. Relaia principială între rezistena structurii şi cerina de deplasare inelastică:T ≥ T C (a) şi T < T C (b).
Normele de proiectare seismică oferă posibilitatea alegerii unor niveluri diferite de ductilitate (de obicei trei)a structurilor, încadrându-le pe acestea din urmă în clase de ductilitate. Alegerea unei clase de ductilitate laproiectarea unei structuri noi are două consecine majore în procesul de proiectare. Prima dintre acestea o
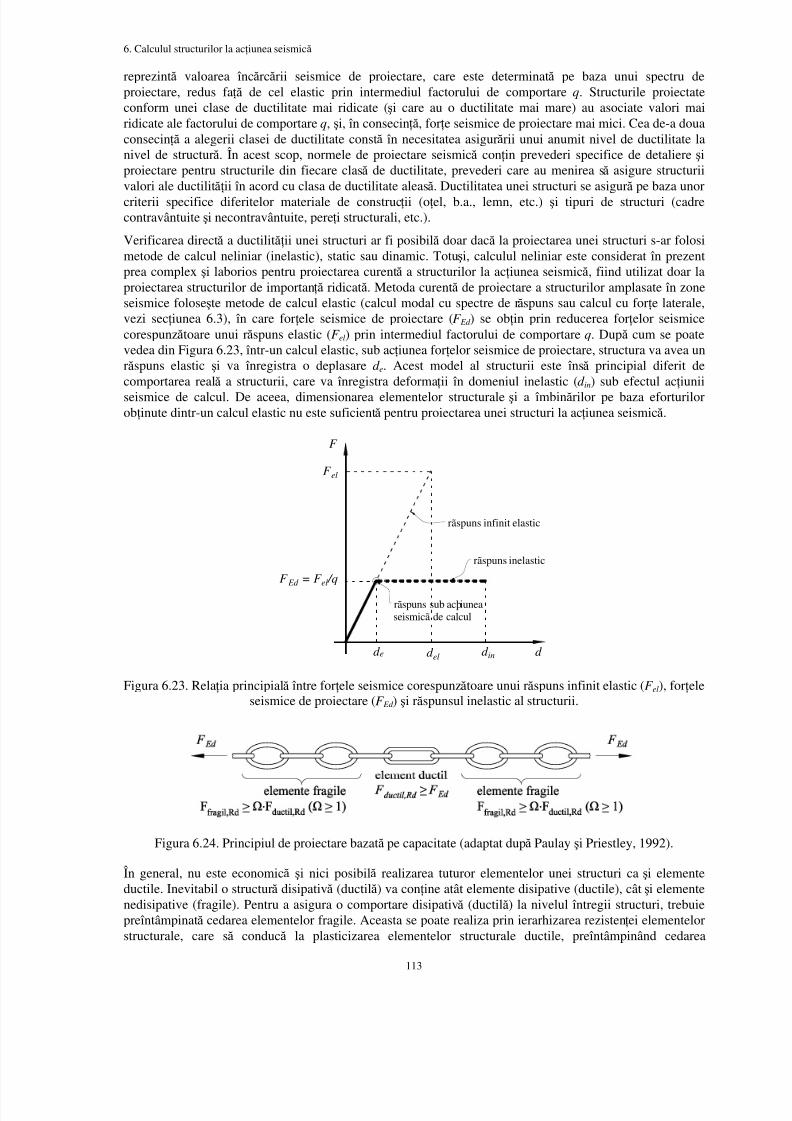
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 114/149
6. Calculul structurilor la aciunea seismică
113
reprezintă valoarea încărcării seismice de proiectare, care este determinată pe baza unui spectru deproiectare, redus faă de cel elastic prin intermediul factorului de comportare q. Structurile proiectateconform unei clase de ductilitate mai ridicate (şi care au o ductilitate mai mare) au asociate valori mairidicate ale factorului de comportare q, şi, în consecină, fore seismice de proiectare mai mici. Cea de-a douaconsecină a alegerii clasei de ductilitate constă în necesitatea asigurării unui anumit nivel de ductilitate lanivel de structură. În acest scop, normele de proiectare seismică conin prevederi specifice de detaliere şiproiectare pentru structurile din fiecare clasă de ductilitate, prevederi care au menirea să asigure structuriivalori ale ductilităii în acord cu clasa de ductilitate aleasă. Ductilitatea unei structuri se asigură pe baza unorcriterii specifice diferitelor materiale de construcii (oel, b.a., lemn, etc.) şi tipuri de structuri (cadrecontravântuite şi necontravântuite, perei structurali, etc.).
Verificarea directă a ductilităii unei structuri ar fi posibilă doar dacă la proiectarea unei structuri s-ar folosimetode de calcul neliniar (inelastic), static sau dinamic. Totuşi, calculul neliniar este considerat în prezentprea complex şi laborios pentru proiectarea curentă a structurilor la aciunea seismică, fiind utilizat doar laproiectarea structurilor de importană ridicată. Metoda curentă de proiectare a structurilor amplasate în zoneseismice foloseşte metode de calcul elastic (calcul modal cu spectre de răspuns sau calcul cu fore laterale,vezi seciunea 6.3), în care forele seismice de proiectare (F Ed ) se obin prin reducerea forelor seismicecorespunzătoare unui răspuns elastic (F el) prin intermediul factorului de comportare q. După cum se poate
vedea din Figura 6.23, într-un calcul elastic, sub aciunea forelor seismice de proiectare, structura va avea unrăspuns elastic şi va înregistra o deplasare d e. Acest model al structurii este însă principial diferit decomportarea reală a structurii, care va înregistra deformaii în domeniul inelastic (d in) sub efectul aciuniiseismice de calcul. De aceea, dimensionarea elementelor structurale şi a îmbinărilor pe baza eforturilorobinute dintr-un calcul elastic nu este suficientă pentru proiectarea unei structuri la aciunea seismică.
F Ed = F el /q
F
d d e d in
F el
d el
rãspuns inelastic
rãspuns infinit elastic
rãspuns sub acþiuneaseismicã de calcul
Figura 6.23. Relaia principială între forele seismice corespunzătoare unui răspuns infinit elastic (F el), foreleseismice de proiectare (F Ed ) şi răspunsul inelastic al structurii.
Figura 6.24. Principiul de proiectare bazată pe capacitate (adaptat după Paulay şi Priestley, 1992).
În general, nu este economică şi nici posibilă realizarea tuturor elementelor unei structuri ca şi elemente
ductile. Inevitabil o structură disipativă (ductilă) va conine atât elemente disipative (ductile), cât şi elementenedisipative (fragile). Pentru a asigura o comportare disipativă (ductilă) la nivelul întregii structuri, trebuiepreîntâmpinată cedarea elementelor fragile. Aceasta se poate realiza prin ierarhizarea rezistenei elementelorstructurale, care să conducă la plasticizarea elementelor structurale ductile, preîntâmpinând cedarea
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 115/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
114
elementelor structurale fragile. Acest principiu de proiectare se numeşte proiectare bazat ă pe capacitate şieste exemplificat în Figura 6.24. Astfel, structura (lanul) din Figura 6.24 este supusă la încărcarea seismică de proiectare F Ed . În urma unui calcul elastic, toate elementele acestei structuri (ductile şi fragile) vor
înregistra eforturi egale cu F Ed . Aceste eforturi servesc la dimensionarea elementelor structurale ductile,folosind relaii de verificare de tipul următor:
,ductil Rd Ed F F ≥ (6.41)
În structura acionată de încărcarea seismică de calcul la SLU eforturile din elementele structurale vor fi însă în general mai mari decât F Ed , fiind limitate de rezistena elementelor ductile (F ductil,Rd ). Prin urmare, pentru apreîntâmpina cedarea elementelor fragile, acesta trebuie dimensionate astfel încât să posede o suprarezistenă faă de capacitatea elementelor ductile:
, , fragil Rd ductil Rd F F ≥ Ω ⋅ (6.42)
unde Ω este un coeficient supraunitar şi ine cont de diversele aspecte care pot conduce la rezistene aleelementelor ductile mai mari decât cele de calcul (fenomene de consolidare, rezistenă a materialului maimare decât cea considerată în calcul, etc.).
În concluzie, proiectarea structurilor la aciunea seismică conform principiului de comportare disipativă
implică două faze. În prima fază se dimensionează elementele ductile (disipative) pe baza eforturilordeterminate dintr-o analiză elastică a structurii supusă forelor seismice de proiectare. Pe lângă rezistenă,elementele desemnate ductile trebuie să posede şi o ductilitate corespunzătoare clasei de ductilitate alese.Ductilitatea se asigură prin folosirea unor detalii constructive şi principii de proiectare specifice diferitelormateriale şi tipuri de structuri, şi sunt descrise în capitolele 7, 8 şi 9. În cea de-a doua fază – proiectareabazată pe capacitate – se dimensionează elementele fragile (nedisipative) pe baza unor eforturi în acesteacorespunzătoare plasticizării elementelor ductile. Această procedură de proiectare are scopul să asigure osuprarezistenă a elementelor fragile faă de cele ductile, conducând la structuri ductile per ansamblu.
6.10.2. Conceptul de proiectare slab-disipativă a structurii
Structurile slab-disipative (fragile) au o ductilitate neglijabilă. Deoarece după atingerea limitei elastice fora
înregistrează o degradare bruscă, aceste structuri trebuie proiectate astfel, ca sub aciunea seismică corespunzătoare SLU structura să rămână în domeniul elastic. În acest scop, încărcarea seismică de calcultrebuie determinată pe baza spectrului de răspuns elastic (vezi ecuaia (6.1)), iar efortul în elementul cel maisolicitat al structurii nu trebuie să depăşească efortul capabil al acelui element.
Prima dintre aceste condiii este echivalentă cu determinarea spectrului de proiectare (ecuaiile (6.14) şi(6.15)) folosind un factor de comportare q=1. Cea de-a doua condiie implică faptul că structurile proiectateconform conceptului de comportare slab-disipativă trebuie să aibă un răspuns preponderent elastic subaciunea încărcărilor seismice de calcul, ceea ce permite proiectarea acestora conform procedurilor de calculfolosite la proiectarea structurilor amplasate în zone neseismice. Astfel, normele de calcul seismic (de ex.P100-1, 2006 şi EN 1998-1, 2003) se folosesc doar pentru determinarea încărcării seismice, iar verificărilestructurii la SLU se efectuează conform normelor generale de calcul a structurilor (de exemplu STAS 10108-
0/78 şi EN 1993 în cazul structurilor metalice).
6.10.3. Alegerea principiului de proiectare
Proiectarea unei structuri ca şi disipativă sau slab-disipativă este la latitudinea proiectantului. Principial,orice structură poate fi proiectată conform uneia dintre cele două abordări. Alegerea principiului deproiectare este de natură economică şi depinde de tipul structurii şi de zona seismică. În general, detaliileconstructive şi cerinele de proiectare menite să asigure ductilitate elementelor disipative conduc la unconsum mai ridicat de materiale în structură. De aceea, dacă forele seismice elastice (nereduse) careacionează asupra unei structuri sunt relativ mici (structura este dimensionată preponderent din altecombinaii de încărcări decât cea seismică), se poate folosi principiul de proiectare slab-disipativă astructurii, care, prin omiterea cerinelor de proiectare menite să asigure o comportare globală ductilă, va
simplifica procesul de proiectare şi va conduce la un consum redus de material.Totuşi, pentru multe tipuri de structuri aciunea seismică reprezintă o solicitare foarte severă îm comparaiecu alte aciuni, iar asigurarea unui răspuns elastic al structurii sub efectul aciunii seismice de calcul la SLU

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 116/149
6. Calculul structurilor la aciunea seismică
115
ar conduce la dimensiuni exagerate ale elementelor structurale şi la un consum excesiv de material. În acestcaz, se poate adopta principiul de proiectare disipativă a structurii, exploatând capacitatea structurii de a sedeforma în domeniul inelastic (ductilitatea) şi proiectând structura pentru nişte fore seismice reduse faă decele corespunzătoare unui răspuns elastic.
În consecină, principiul de proiectare slab-disipativă se dovedeşte economic în cazul unor fore seismicemici, iar cel de proiectare disipativă este mai economic în cazul unor fore seismice ridicate. Forele seismice
fiind fore de natură inerială, sunt generate de acceleraia care acionează asupra maselor structurii ca urmarea mişcării seismice impuse bazei structurii. De aceea, forele seismice vor avea valori reduse în cazul unorstructuri uşoare şi atunci când aciunea seismică are o intensitate redusă (zone cu seismicitate redusă).Viceversa, forele seismice au valori importante în cazul structurilor cu mase mari şi a structurilor amplasate
în zone cu seismicitate ridicată.
Un exemplu de structură uşoară, la care se pretează principiul de proiectare slab-disipativă, este reprezentatde halele metalice parter. Acestea sunt caracterizate pe de o parte de greutăii proprii relativ mici şi pe de altă parte de încărcări mici din exploatare. Exemple tipice de structuri care atrag asupra lor fore seismice ridicatesunt structurile multietajate (metalice, din b.a., sau compuse oel-beton).
Toate criteriile de proiectare care sunt prezentate în cele ce urmează se referă la proiectarea structurilorconform principiului de comportare disipativă.
6.11. Verificarea la SLU
Conform EN 1998-1 (2003) verificarea unei structuri la SLU necesită îndeplinirea următoarelor cerineprincipale: rezistenă, ductilitate, rezistena fundaiilor şi rosturi seismice. P100-1 (2006) impune suplimentarlimitarea deplasărilor laterale de nivel la SLU.
6.11.1. Condi ia de rezisten ă
Condiia de rezistenă implică verificarea elementelor structurale (şi în unele cazuri a celor nestructurale) laeforturile de calcul determinate din combinaia de încărcări corespunzătoare aciunii seismice. Relaia deverificare generică are forma:
E d ≤ Rd (6.43)unde:
E d – valoarea de proiectare a efectului aciunii, în combinaia care conine aciunea seismică Rd – valoarea corespunzătoare efortului capabil
În general, în calculul structural trebuie considerate şi efectele de ordinul doi (calcul geometric neliniar).Într-un calcul geometric neliniar încărcările sunt aplicate pe forma deformată a structurii, ceea ce conduce ladeplasări şi eforturi mai mari decât într-un calcul liniar elastic. Efectele de ordinul doi sunt importante pentruelementele solicitate la fore de compresiune mari şi în cazul unor deplasări laterale mari. În cazul aciuniiseismice efectele de ordinul doi pot fi importante deoarece deplasările laterale sunt considerabile. Totuşi,efectele de ordinul doi pot fi neglijate dacă pentru fiecare nivel al structurii este îndeplinită următoarea
condiie:
0.10tot r
tot
P d
V hθ = ≤ (6.44)
unde:θ coeficientul de sensibilitate al deplasării relative de nivelPtot încărcarea verticală totală la nivelul considerat, în ipoteza de calcul seismicd r deplasarea relativă de nivel, determinată ca diferena deplasărilor laterale medii la partea superioară
şi la cea inferioară nivelului considerat, determinată pe baza deplasărilor corespunzătoare SLU -calculate conform relaiei (6.45)
V tot fora tăietoare totală de nivelh înălimea de nivel
Conform P100-1 (2006) şi EN198-1 (2003), dacă 0.1 < θ ≤ 0.2, efectele de ordinul doi pot fi luate înconsiderare în mod aproximativ, multiplicând valorile de calcul ale eforturilor cu factorul 1/(1-θ ). Dacă 0.2 < θ < 0.3, determinarea valorilor eforturilor secionale se face pe baza unui calcul structural cu

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 117/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
116
considerarea echilibrului pe poziia deformată a structurii (printr-un calcul de ordinul doi explicit). Nu seadmit valori θ ≥ 0.3, acestea indicând o sensibilitate exagerată a structurii la efectele de ordinul doi, care oface susceptibilă de pierderea stabilităii globale.
6.11.2. Limitarea deplasărilor laterale la SLU
Calculul deplasărilor laterale pentru SLU se face cu relaia:
es d qcd = (6.45)unde:d s deplasarea unui punct din sistemul structural ca efect al ac iunii seismiceq factorul de comportare specific tipului de structură d e deplasarea aceluiaşi punct din sistemul structural, determinată prin calcul static elastic sub încărcări
seismice de proiectarec factor supraunitar care ine seama de faptul că în răspunsul seismic inelastic cerinele de deplasare
sunt superioare celor din răspunsul elastic pentru structuri cu perioada de oscilaie mai mică decât T C (vezi seciunea 4.6.3 şi Figura 4.18)
Valorile coeficientului c se determină conform relaiei:
1 3 2.5 2C
T cT
≤ = − ≤ (6.46)
unde T este perioada proprie fundamentală de vibraie a structurii.
Conform P100-1 (2006), verificarea deplasărilor relative de nivel la starea limită ultimă are drept scopevitarea pierderilor de viei omeneşti prin prevenirea prăbuşirii totale a elementelor nestructurale. Seurmăreşte deopotrivă realizarea unei marje de sigurană suficiente faă de stadiul cedării elementelorstructurale. Verificarea la deplasare se face pe baza expresiei:
ULS
a ,r re
ULS
r d d qcd ≤= (6.47)
unde:
ULSr d deplasarea relativă de nivel sub aciunea seismică asociată SLUd re deplasarea relativă de nivel, determinată prin calcul static elastic din încărcări seismice de proiectare
ULS
a ,r d valoare admisibilă a deplasării relative de nivel, egală cu 0.025h (unde h este înălimea de nivel)
În Figura 6.25 este prezentată relaia dintre foră tăietoare de bază şi deplasarea laterală la vârful uneistructuri. În urma unui calcul elastic din forele de proiectare F Ed se obine deplasarea d e. Această deplasareeste determinată pe baza spectrului de proiectare, redus prin intermediul factorului q faă de spectrul elastic,şi nu reprezintă deplasarea reală (inelastică) pe care o va înregistra structura sub efectul aciunii seismice laSLU. De aceea, este necesară estimarea deplasării inelastice d s pe care o va înregistra structura supusă aciunii seismice de calcul.
Dacă structura ar avea o comportare infinit elastică, aciunii seismice nereduse i-ar corespunde fora elastică q⋅ F Ed şi deplasarea q⋅ d e. Atunci când perioada fundamentală a structurii este mai mare decât perioada decontrol T C a spectrului de răspuns, deplasările elastice sunt egale cu cele inelastice (d s = q⋅ d e), coeficientul c având valoarea 1. Dacă perioada proprie de vibraie a structurii este mai mică decât perioada de control T C aspectrului de răspuns, deplasările inelastice sunt mai mari decât cele elastice (d s = c⋅q⋅d e), coeficientul c având valori supraunitare.

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 118/149
6. Calculul structurilor la aciunea seismică
117
q·d e c·q·d ed e
F Ed
q·F Ed
d
raspunsinfinit elastic
raspuns inelastic
Figura 6.25. Calculul deformaiilor la SLU conform P100-1 (2006).
6.11.3. Verificarea ductilit ă ii locale şi globale
Componenta principală a factorului de comportare q o constituie ductilitatea structurii. Factorii decomportare q pe care se bazează determinarea forelor seismice de proiectare sunt specificai în normele deproiectare seismică funcie de material, clasa de ductilitate şi tipul structurii, şi pot fi afectai de regularitateape verticală a structurii. Structura proiectată trebuie să posede ductilitatea locală şi globală pe care s-a bazatdeterminarea factorilor de comportare q.
Criteriile de asigurare a ductilităii locale (la nivel de material, seciune şi element structural) sunt specificatede norme pentru fiecare tip de material şi structură în parte. O condiie generală pentru toate tipurile demateriale şi structuri o constituie asigurarea unei ductilităi globale adecvate. Aceasta din urmă se poateobine prin ierarhizarea rezistenei elementelor structurale urmărind principiile de proiectare bazată pecapacitate, pentru a localiza deformaiile plastice în elementele ductile şi a evita cedarea în elementelefragile. Suplimentar, în scopul obinerii unei ductilităi globale corespunzătoare la structurile multietajate,este necesară asigurarea unui mecanism plastic global a structurii (vezi Figura 6.26a). Acest mecanismasigură un număr maxim de zone plastice şi o solicitare uniformă a acestora. Trebuie evitate mecanismeleplastice de nivel (vezi Figura 6.26b), deoarece în acest caz deformaiile inelastice sunt concentrate într-unnumăr redus de zone plastice, având cerine de deformaii inelastice θ loc mai ridicate decât în cazul unuimecanism plastic global θ gl, la aceeaşi deplasare globală a structurii δ .
(a) (b)
Figura 6.26. Mecanism plastic global (a) şi mecanism plastic de nivel (b).
6.11.4. Rezisten a funda iilor
Reaciunile în fundaii determinate pe baza forelor seismice de proiectare sunt mai mici decât cele care vorapărea în cazul unui cutremur corespunzător SLU, deoarece acestea au fost determinate pe baza spectrului de
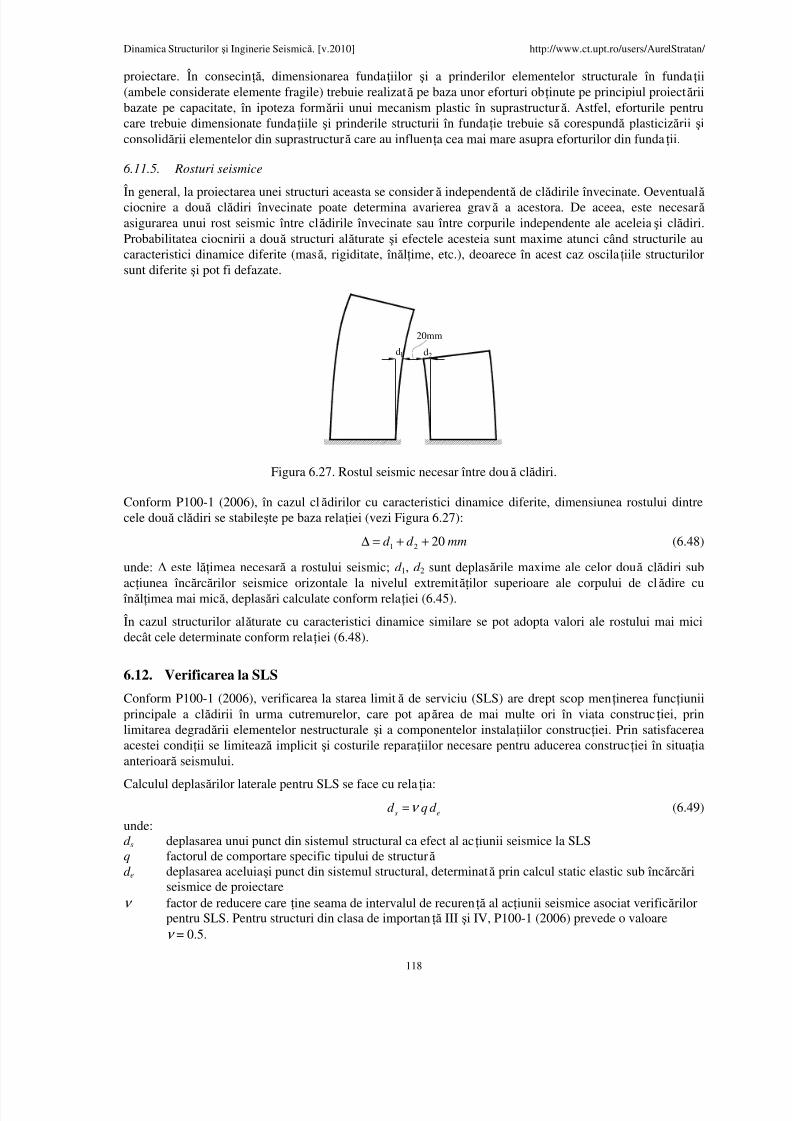
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 119/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
118
proiectare. În consecină, dimensionarea fundaiilor şi a prinderilor elementelor structurale în fundaii(ambele considerate elemente fragile) trebuie realizată pe baza unor eforturi obinute pe principiul proiectăriibazate pe capacitate, în ipoteza formării unui mecanism plastic în suprastructură. Astfel, eforturile pentrucare trebuie dimensionate fundaiile şi prinderile structurii în fundaie trebuie să corespundă plasticizării şiconsolidării elementelor din suprastructură care au influena cea mai mare asupra eforturilor din fundaii.
6.11.5. Rosturi seismice
În general, la proiectarea unei structuri aceasta se consideră independentă de clădirile învecinate. Oeventuală ciocnire a două clădiri învecinate poate determina avarierea gravă a acestora. De aceea, este necesară asigurarea unui rost seismic între clădirile învecinate sau între corpurile independente ale aceleiaşi clădiri.Probabilitatea ciocnirii a două structuri alăturate şi efectele acesteia sunt maxime atunci când structurile aucaracteristici dinamice diferite (masă, rigiditate, înălime, etc.), deoarece în acest caz oscilaiile structurilorsunt diferite şi pot fi defazate.
d1 d2
20mm
Figura 6.27. Rostul seismic necesar între două clădiri.
Conform P100-1 (2006), în cazul clădirilor cu caracteristici dinamice diferite, dimensiunea rostului dintrecele două clădiri se stabileşte pe baza relaiei (vezi Figura 6.27):
1 2 20d d mm∆ = + + (6.48)
unde: ∆ este lăimea necesară a rostului seismic; d 1, d 2 sunt deplasările maxime ale celor două clădiri subaciunea încărcărilor seismice orizontale la nivelul extremităilor superioare ale corpului de clădire cu
înălimea mai mică, deplasări calculate conform relaiei (6.45).
În cazul structurilor alăturate cu caracteristici dinamice similare se pot adopta valori ale rostului mai micidecât cele determinate conform relaiei (6.48).
6.12. Verificarea la SLS
Conform P100-1 (2006), verificarea la starea limită de serviciu (SLS) are drept scop meninerea funciunii
principale a clădirii în urma cutremurelor, care pot apărea de mai multe ori în viata construciei, prinlimitarea degradării elementelor nestructurale şi a componentelor instalaiilor construciei. Prin satisfacereaacestei condiii se limitează implicit şi costurile reparaiilor necesare pentru aducerea construciei în situaiaanterioară seismului.
Calculul deplasărilor laterale pentru SLS se face cu relaia:
s ed q d ν = (6.49)
unde:d s deplasarea unui punct din sistemul structural ca efect al ac iunii seismice la SLSq factorul de comportare specific tipului de structură d e deplasarea aceluiaşi punct din sistemul structural, determinată prin calcul static elastic sub încărcări
seismice de proiectareν factor de reducere care ine seama de intervalul de recurenă al aciunii seismice asociat verificărilorpentru SLS. Pentru structuri din clasa de importană III şi IV, P100-1 (2006) prevede o valoareν = 0.5.
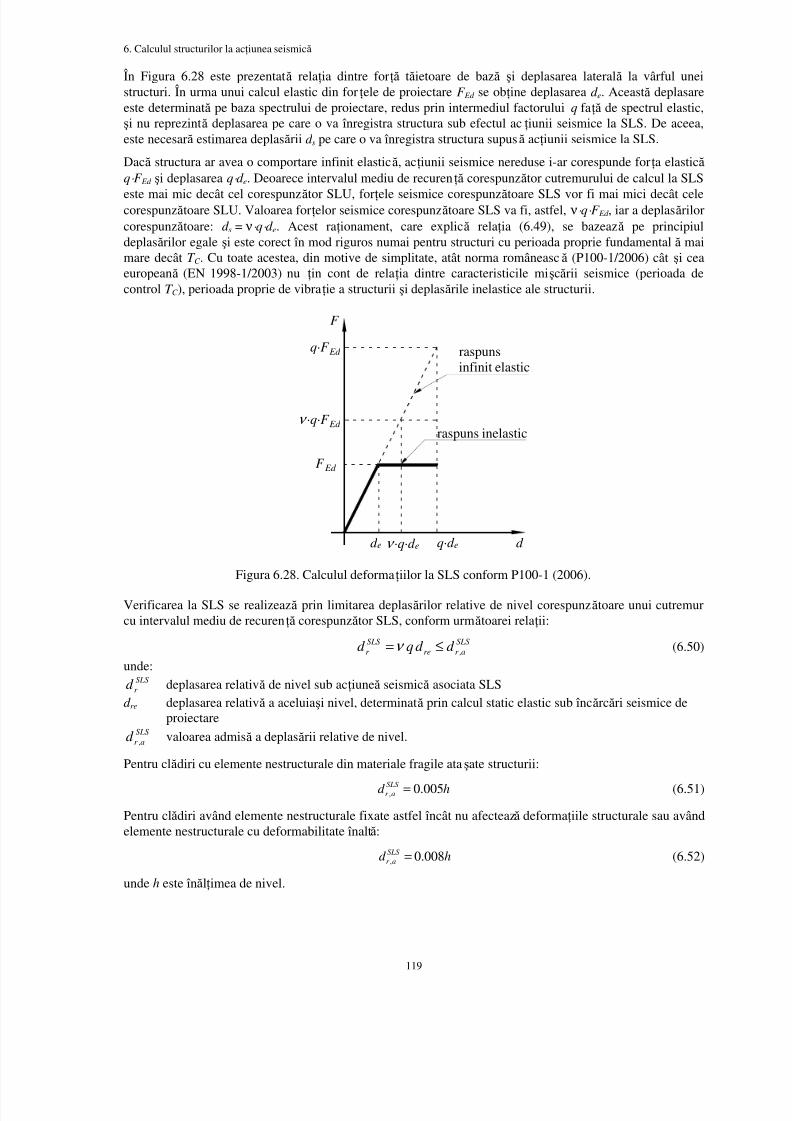
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 120/149
6. Calculul structurilor la aciunea seismică
119
În Figura 6.28 este prezentată relaia dintre foră tăietoare de bază şi deplasarea laterală la vârful uneistructuri. În urma unui calcul elastic din forele de proiectare F Ed se obine deplasarea d e. Această deplasareeste determinată pe baza spectrului de proiectare, redus prin intermediul factorului q faă de spectrul elastic,şi nu reprezintă deplasarea pe care o va înregistra structura sub efectul aciunii seismice la SLS. De aceea,este necesară estimarea deplasării d s pe care o va înregistra structura supusă aciunii seismice la SLS.
Dacă structura ar avea o comportare infinit elastică, aciunii seismice nereduse i-ar corespunde fora elastică
q⋅ F Ed şi deplasarea q⋅ d e. Deoarece intervalul mediu de recurenă corespunzător cutremurului de calcul la SLSeste mai mic decât cel corespunzător SLU, forele seismice corespunzătoare SLS vor fi mai mici decât celecorespunzătoare SLU. Valoarea forelor seismice corespunzătoare SLS va fi, astfel, ν⋅ q⋅ F Ed , iar a deplasărilorcorespunzătoare: d s = ν⋅ q⋅ d e. Acest raionament, care explică relaia (6.49), se bazează pe principiuldeplasărilor egale şi este corect în mod riguros numai pentru structuri cu perioada proprie fundamentală maimare decât T C . Cu toate acestea, din motive de simplitate, atât norma românească (P100-1/2006) cât şi ceaeuropeană (EN 1998-1/2003) nu in cont de relaia dintre caracteristicile mişcării seismice (perioada decontrol T C ), perioada proprie de vibraie a structurii şi deplasările inelastice ale structurii.
raspunsinfinit elastic
q·d e
ν ·q·F Ed
ν ·q·d ed e
raspuns inelastic
F Ed
q·F Ed
d
F
Figura 6.28. Calculul deformaiilor la SLS conform P100-1 (2006).
Verificarea la SLS se realizează prin limitarea deplasărilor relative de nivel corespunzătoare unui cutremurcu intervalul mediu de recurenă corespunzător SLS, conform următoarei relaii:
SLS
a ,r re
SLS
r d d qd ≤=ν (6.50)
unde:SLS
r d deplasarea relativă de nivel sub aciuneă seismică asociata SLSd re deplasarea relativă a aceluiaşi nivel, determinată prin calcul static elastic sub încărcări seismice de
proiectareSLS
a ,r d valoarea admisă a deplasării relative de nivel.
Pentru clădiri cu elemente nestructurale din materiale fragile ataşate structurii:
, 0.005SLS
r ad h= (6.51)
Pentru clădiri având elemente nestructurale fixate astfel încât nu afectează deformaiile structurale sau avândelemente nestructurale cu deformabilitate înaltă:
, 0.008SLS
r ad h= (6.52)
unde h este înălimea de nivel.
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 121/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
120
7. Proiectarea seismică a structurilor metalice
7.1. Principii de proiectare
Structurile metalice amplasate în zone seismice pot fi proiectate folosind fie principiul de comportaredisipativă, fie cel de comportare slab-disipativă a structurii. Cele două principii de proiectare sunt descrisedetaliat în seciunea 6.10.
Funcie de principiul de proiectare ales şi de ductilitatea globală care i se conferă construciei la proiectare,structurii i se atribuie o clasă de ductilitate: H (mare), M (medie) sau L (redusă), vezi Tabelul 7.1. În cazul încare o structură se proiectează conform principiului de proiectare slab-disipativă (clasa de ductilitate L),norma românească prevede folosirea unui factor de comportare q = 1. Această valoare a factorului decomportare are scopul de a asigura un răspuns în domeniul elastic al structurii sub aciunea seismică decalcul la SLU. După cum s-a menionat în seciunea 6.2.2, factorii de comportare q folosii pentru reducereaforelor seismice de proiectare se datorează ductilităii, redundanei şi suprarezistenei. Dacă structura nu esteductilă, nu poate fi exploatată nici redundana (capacitatea de redistribuire a eforturilor în structură ca urmare
a plasticizării succesive a unor zone din structură). Totuşi, structurile neductile dar care au o suprarezistenă de proiectare, pot fi proiectate la fore seismice reduse faă de cele corespunzătoare unui răspuns elastic. Înaceste cazuri factorul de comportare q se datorează suprarezistenei, şi nu ductilităii sau redundaneistructurii. Norme precum EN 1998-1 (2003) acceptă folosirea unui factor de comportare cuprins între 1.0 şi2.0 pentru proiectarea structurilor slab-disipative. Norma românească P100-1 (2006) este mai acoperitoare,aceasta adoptând un factor de comportare q = 1 în cazul structurilor încadrate în clasa de ductilitate L.Deoarece structurile proiectate conform principiului slab disipativ vor avea un răspuns preponderent elasticsub aciunea încărcărilor seismice de calcul, proiectarea acestora se face conform procedurilor de calculfolosite la proiectarea structurilor amplasate în zone neseismice. Astfel, norme de calcul seismic (de ex.P100-1, 2006) se folosesc doar pentru determinarea încărcărilor de calcul, iar verificările structurii la SLU seefectuează conform normelor de calcul al structurilor metalice (STAS 10108-0/78, EN 1993, etc.).
Tabelul 7.1. Concepte de proiectare, valori de referină ale factorilor de comportare şi clase de ductilitate alestructurii (P100-1, 2006).
Conceptul de proiectare Domeniul valorilor de referină a factorului decomportare q
Clasa de ductilitatestructurală
Structuri cu disipare mare limitat de tipul structurii H (mare)Structuri cu disipare medie q < 4.0, limitat de tipul structurii M (medie)Structuri slab disipative q = 1.0 L (redusă)
În cazul folosirii conceptului de proiectare disipativă, se poate face distincie între două nivele diferite aleductilităii structurii prin încadrarea acesteia în clasa de ductilitate H sau M. Factorul de comportare q folosit
în acest caz pentru reducerea forelor seismice are valori mai mari decât 1, componenta principală a acestuiadatorându-se ductilităii. Valorile de referină ale factorilor de comportare q folosii la proiectarea structurilor
disipative sunt specificate în normele de proiectare seismică funcie de material şi de tipul structural folosit.Valorile maxime (de referină) ale factorilor de comportare pot fi obinui dacă materialul, elementelestructurale, îmbinările acestora şi structura în ansamblu respectă criterii specifice de proiectare care asigură oductilitate ridicată a structurii. Aceste structuri sunt încadrate în clasa de ductilitate H (mare), vezi Tabelul7.1. Dacă unele dintre aceste cerine sunt mai relaxate, ductilitatea globală a structurilor va fi mai redusă,acestea fiind încadrate în clasa de ductilitate M (medie). La stabilirea încărcărilor seismice de calcul pentrustructurile cu o disipare medie, factorul de comportare de referină nu poate fi mai mare decât valoarea q=4.După cum s-a specificat în seciunea 6.5.3, factorul de comportare de referină este specificat pentru structuriregulate pe verticală, şi trebuie redus cu 20% (conform P100-1, 2006 şi EN 1998, 2003) atunci când structuraproiectată nu îndeplineşte condiiile de regularitate pe verticală.
Toate criteriile de proiectare care sunt prezentate în seciunile următoare ale acestui capitol se referă la
structurile proiectate conform principiului de comportare disipativă a structurii.
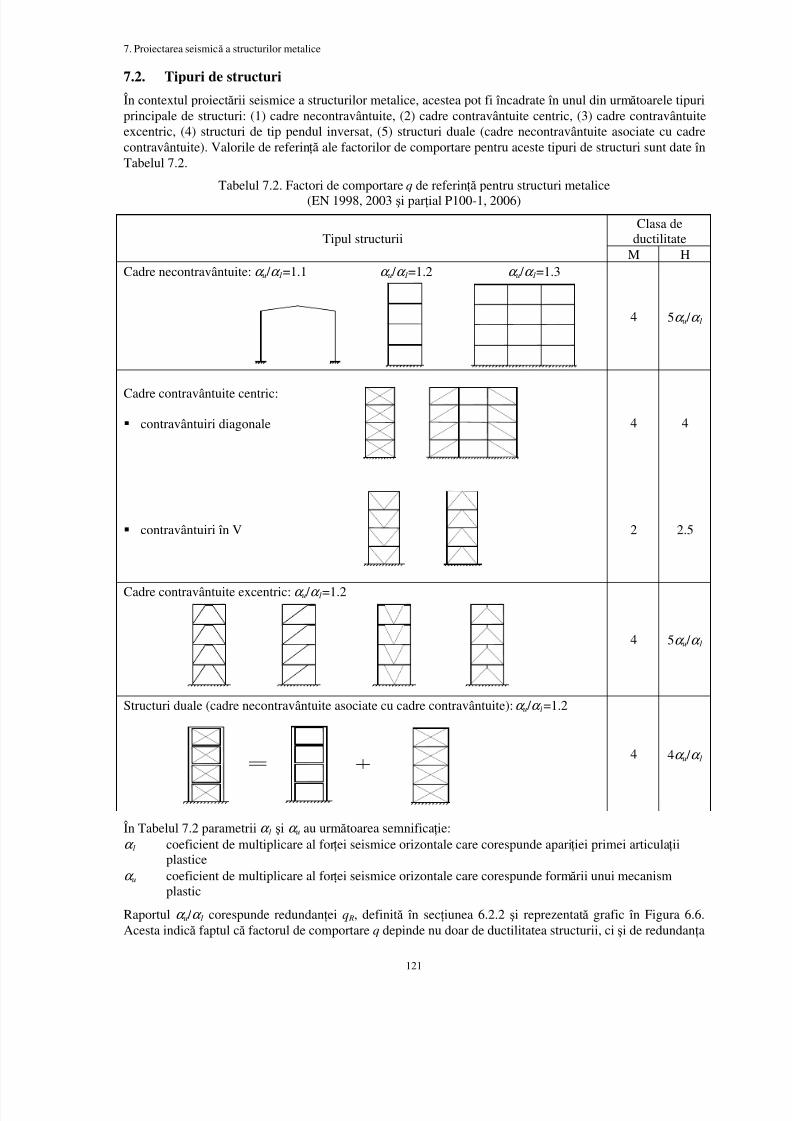
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 122/149
7. Proiectarea seismică a structurilor metalice
121
7.2. Tipuri de structuri
În contextul proiectării seismice a structurilor metalice, acestea pot fi încadrate în unul din următoarele tipuriprincipale de structuri: (1) cadre necontravântuite, (2) cadre contravântuite centric, (3) cadre contravântuiteexcentric, (4) structuri de tip pendul inversat, (5) structuri duale (cadre necontravântuite asociate cu cadrecontravântuite). Valorile de referină ale factorilor de comportare pentru aceste tipuri de structuri sunt date înTabelul 7.2.
Tabelul 7.2. Factori de comportare q de referină pentru structuri metalice(EN 1998, 2003 şi parial P100-1, 2006)
Clasa deductilitateTipul structurii
M HCadre necontravântuite: α u / α 1=1.1 α u / α 1=1.2 α u / α 1=1.3
4 5α u / α 1
Cadre contravântuite centric:
contravântuiri diagonale
contravântuiri în V
4
2
4
2.5
Cadre contravântuite excentric: α u / α 1=1.2
4 5α u / α 1
Structuri duale (cadre necontravântuite asociate cu cadre contravântuite): α u / α 1=1.2
4 4α u / α 1
În Tabelul 7.2 parametrii α 1 şi α u au următoarea semnificaie:α 1 coeficient de multiplicare al forei seismice orizontale care corespunde apariiei primei articulaii
plasticeα u coeficient de multiplicare al forei seismice orizontale care corespunde formării unui mecanism
plasticRaportul α u / α 1 corespunde redundanei q R, definită în seciunea 6.2.2 şi reprezentată grafic în Figura 6.6.Acesta indică faptul că factorul de comportare q depinde nu doar de ductilitatea structurii, ci şi de redundana
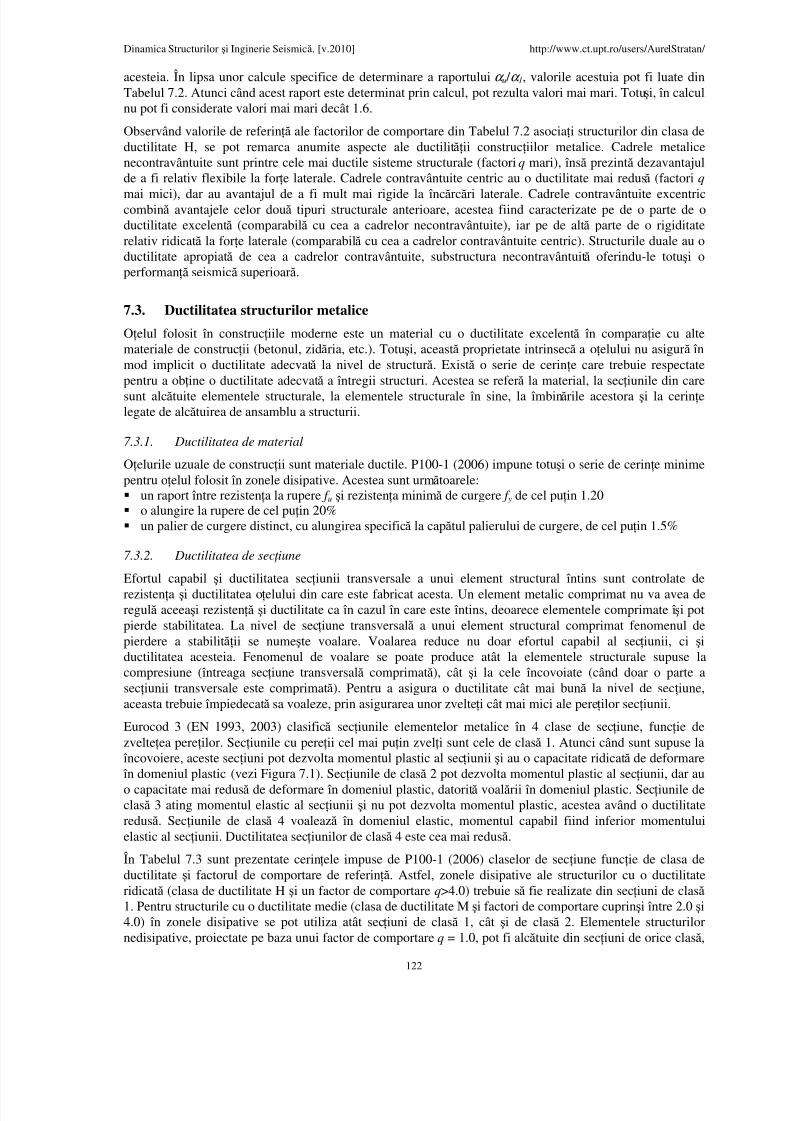
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 123/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
122
acesteia. În lipsa unor calcule specifice de determinare a raportului α u / α 1, valorile acestuia pot fi luate dinTabelul 7.2. Atunci când acest raport este determinat prin calcul, pot rezulta valori mai mari. Totuşi, în calculnu pot fi considerate valori mai mari decât 1.6.
Observând valorile de referină ale factorilor de comportare din Tabelul 7.2 asociai structurilor din clasa deductilitate H, se pot remarca anumite aspecte ale ductilităii construciilor metalice. Cadrele metalicenecontravântuite sunt printre cele mai ductile sisteme structurale (factori q mari), însă prezintă dezavantajul
de a fi relativ flexibile la fore laterale. Cadrele contravântuite centric au o ductilitate mai redusă (factori q mai mici), dar au avantajul de a fi mult mai rigide la încărcări laterale. Cadrele contravântuite excentriccombină avantajele celor două tipuri structurale anterioare, acestea fiind caracterizate pe de o parte de oductilitate excelentă (comparabilă cu cea a cadrelor necontravântuite), iar pe de altă parte de o rigiditaterelativ ridicată la fore laterale (comparabilă cu cea a cadrelor contravântuite centric). Structurile duale au oductilitate apropiată de cea a cadrelor contravântuite, substructura necontravântuită oferindu-le totuşi operformană seismică superioară.
7.3. Ductilitatea structurilor metalice
Oelul folosit în construciile moderne este un material cu o ductilitate excelentă în comparaie cu altemateriale de construcii (betonul, zidăria, etc.). Totuşi, această proprietate intrinsecă a oelului nu asigură înmod implicit o ductilitate adecvată la nivel de structură. Există o serie de cerine care trebuie respectatepentru a obine o ductilitate adecvată a întregii structuri. Acestea se referă la material, la seciunile din caresunt alcătuite elementele structurale, la elementele structurale în sine, la îmbinările acestora şi la cerinelegate de alcătuirea de ansamblu a structurii.
7.3.1. Ductilitatea de material
Oelurile uzuale de construcii sunt materiale ductile. P100-1 (2006) impune totuşi o serie de cerine minimepentru oelul folosit în zonele disipative. Acestea sunt următoarele: un raport între rezistena la rupere f u şi rezistena minimă de curgere f y de cel puin 1.20 o alungire la rupere de cel puin 20% un palier de curgere distinct, cu alungirea specifică la capătul palierului de curgere, de cel puin 1.5%
7.3.2. Ductilitatea de sec iune
Efortul capabil şi ductilitatea seciunii transversale a unui element structural întins sunt controlate derezistena şi ductilitatea oelului din care este fabricat acesta. Un element metalic comprimat nu va avea deregulă aceeaşi rezistenă şi ductilitate ca în cazul în care este întins, deoarece elementele comprimate î şi potpierde stabilitatea. La nivel de seciune transversală a unui element structural comprimat fenomenul depierdere a stabilităii se numeşte voalare. Voalarea reduce nu doar efortul capabil al seciunii, ci şiductilitatea acesteia. Fenomenul de voalare se poate produce atât la elementele structurale supuse lacompresiune (întreaga seciune transversală comprimată), cât şi la cele încovoiate (când doar o parte aseciunii transversale este comprimată). Pentru a asigura o ductilitate cât mai bună la nivel de seciune,aceasta trebuie împiedecată sa voaleze, prin asigurarea unor zveltei cât mai mici ale pereilor seciunii.
Eurocod 3 (EN 1993, 2003) clasifică seciunile elementelor metalice în 4 clase de seciune, funcie dezvelteea pereilor. Seciunile cu pereii cel mai puin zveli sunt cele de clasă 1. Atunci când sunt supuse la
încovoiere, aceste seciuni pot dezvolta momentul plastic al seciunii şi au o capacitate ridicată de deformare în domeniul plastic (vezi Figura 7.1). Seciunile de clasă 2 pot dezvolta momentul plastic al seciunii, dar auo capacitate mai redusă de deformare în domeniul plastic, datorită voalării în domeniul plastic. Seciunile declasă 3 ating momentul elastic al seciunii şi nu pot dezvolta momentul plastic, acestea având o ductilitateredusă. Seciunile de clasă 4 voalează în domeniul elastic, momentul capabil fiind inferior momentuluielastic al seciunii. Ductilitatea seciunilor de clasă 4 este cea mai redusă.
În Tabelul 7.3 sunt prezentate cerinele impuse de P100-1 (2006) claselor de seciune funcie de clasa deductilitate şi factorul de comportare de referină. Astfel, zonele disipative ale structurilor cu o ductilitate
ridicată (clasa de ductilitate H şi un factor de comportare q>4.0) trebuie să fie realizate din seciuni de clasă 1. Pentru structurile cu o ductilitate medie (clasa de ductilitate M şi factori de comportare cuprinşi între 2.0 şi4.0) în zonele disipative se pot utiliza atât seciuni de clasă 1, cât şi de clasă 2. Elementele structurilornedisipative, proiectate pe baza unui factor de comportare q = 1.0, pot fi alcătuite din seciuni de orice clasă,
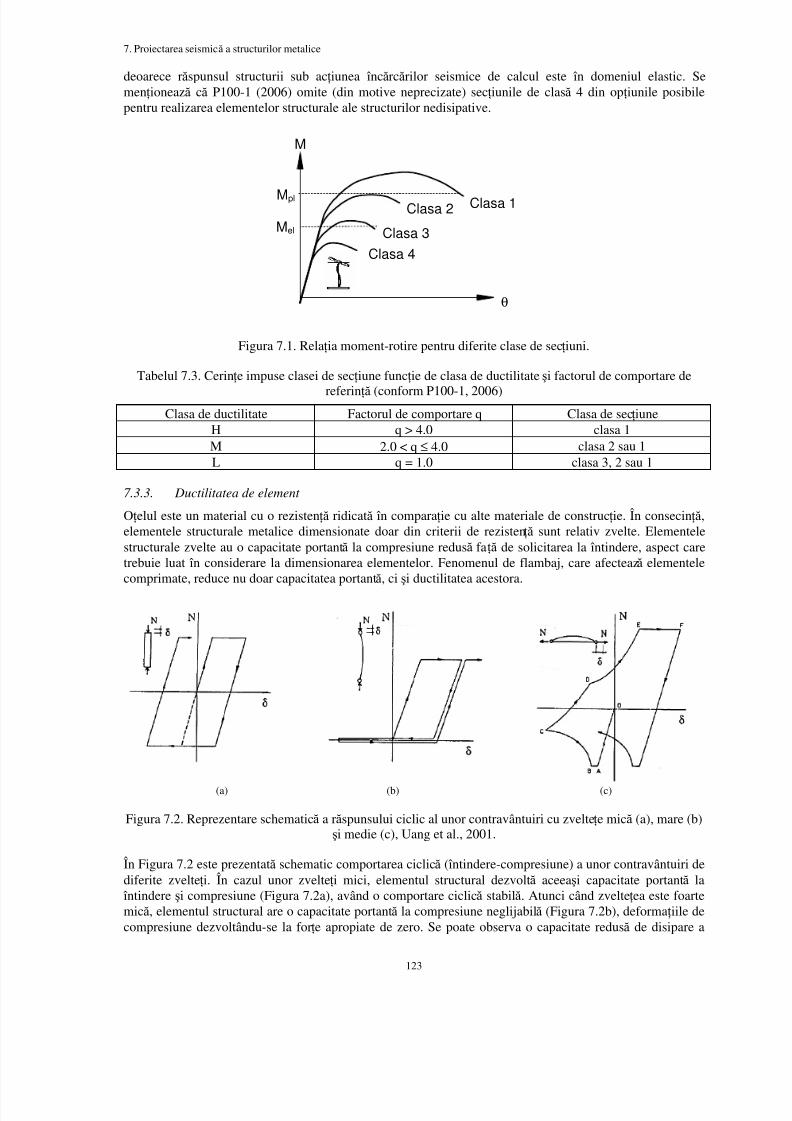
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 124/149
7. Proiectarea seismică a structurilor metalice
123
deoarece răspunsul structurii sub aciunea încărcărilor seismice de calcul este în domeniul elastic. Semenionează că P100-1 (2006) omite (din motive neprecizate) seciunile de clasă 4 din opiunile posibilepentru realizarea elementelor structurale ale structurilor nedisipative.
M
θ
Mpl
Clasa 4
Clasa 3
Clasa 2 Clasa 1
Mel
Figura 7.1. Relaia moment-rotire pentru diferite clase de seciuni.
Tabelul 7.3. Cerine impuse clasei de seciune funcie de clasa de ductilitate şi factorul de comportare dereferină (conform P100-1, 2006)
Clasa de ductilitate Factorul de comportare q Clasa de seciuneH q > 4.0 clasa 1M 2.0 < q ≤ 4.0 clasa 2 sau 1L q = 1.0 clasa 3, 2 sau 1
7.3.3. Ductilitatea de element
Oelul este un material cu o rezistenă ridicată în comparaie cu alte materiale de construcie. În consecină,
elementele structurale metalice dimensionate doar din criterii de rezistenă sunt relativ zvelte. Elementelestructurale zvelte au o capacitate portantă la compresiune redusă faă de solicitarea la întindere, aspect caretrebuie luat în considerare la dimensionarea elementelor. Fenomenul de flambaj, care afectează elementelecomprimate, reduce nu doar capacitatea portantă, ci şi ductilitatea acestora.
(a) (b) (c)
Figura 7.2. Reprezentare schematică a răspunsului ciclic al unor contravântuiri cu zveltee mică (a), mare (b)şi medie (c), Uang et al., 2001.
În Figura 7.2 este prezentată schematic comportarea ciclică (întindere-compresiune) a unor contravântuiri dediferite zveltei. În cazul unor zveltei mici, elementul structural dezvoltă aceeaşi capacitate portantă la
întindere şi compresiune (Figura 7.2a), având o comportare ciclică stabilă. Atunci când zvelteea este foartemică, elementul structural are o capacitate portantă la compresiune neglijabilă (Figura 7.2b), deformaiile decompresiune dezvoltându-se la fore apropiate de zero. Se poate observa o capacitate redusă de disipare a
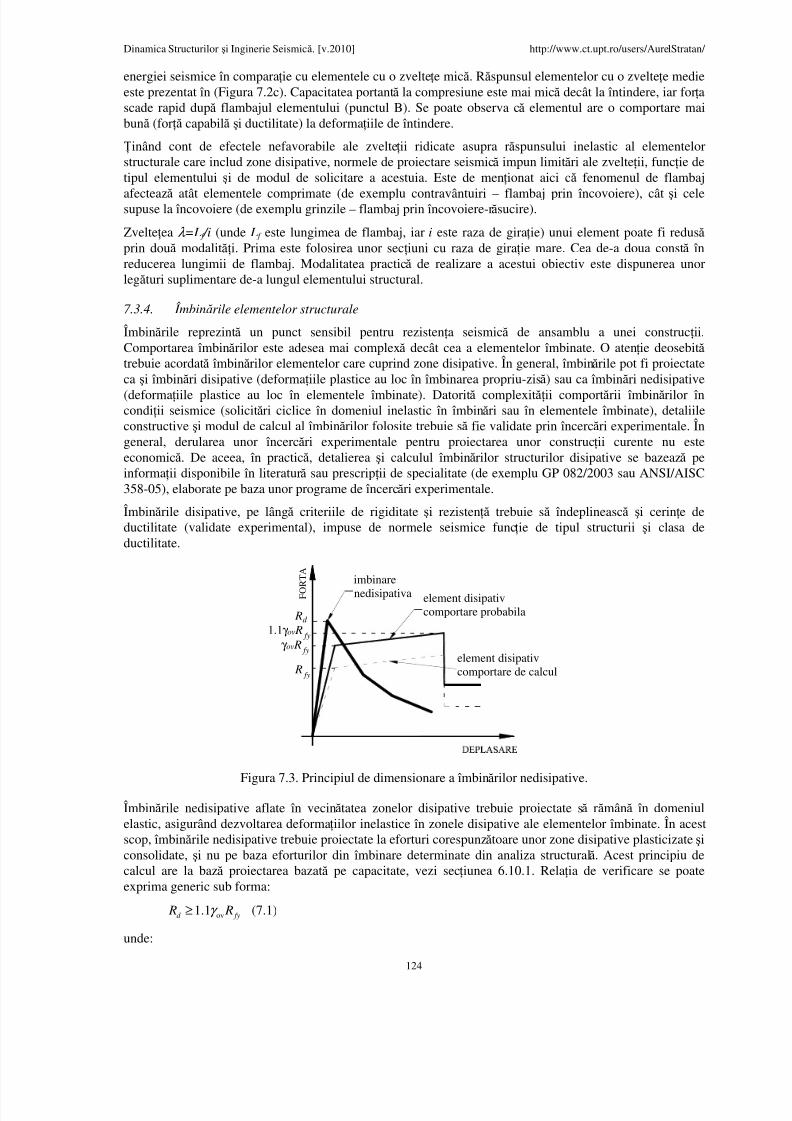
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 125/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
124
energiei seismice în comparaie cu elementele cu o zveltee mică. Răspunsul elementelor cu o zveltee medieeste prezentat în (Figura 7.2c). Capacitatea portantă la compresiune este mai mică decât la întindere, iar forascade rapid după flambajul elementului (punctul B). Se poate observa că elementul are o comportare maibună (foră capabilă şi ductilitate) la deformaiile de întindere.
inând cont de efectele nefavorabile ale zvelteii ridicate asupra răspunsului inelastic al elementelorstructurale care includ zone disipative, normele de proiectare seismică impun limitări ale zvelteii, funcie de
tipul elementului şi de modul de solicitare a acestuia. Este de menionat aici că fenomenul de flambajafectează atât elementele comprimate (de exemplu contravântuiri – flambaj prin încovoiere), cât şi celesupuse la încovoiere (de exemplu grinzile – flambaj prin încovoiere-răsucire).
Zvelteea λ =L f /i (unde L f este lungimea de flambaj, iar i este raza de giraie) unui element poate fi redusă prin două modalităi. Prima este folosirea unor seciuni cu raza de giraie mare. Cea de-a doua constă înreducerea lungimii de flambaj. Modalitatea practică de realizare a acestui obiectiv este dispunerea unorlegături suplimentare de-a lungul elementului structural.
7.3.4. Îmbinările elementelor structurale
Îmbinările reprezintă un punct sensibil pentru rezistena seismică de ansamblu a unei construcii.Comportarea îmbinărilor este adesea mai complexă decât cea a elementelor îmbinate. O atenie deosebită trebuie acordată îmbinărilor elementelor care cuprind zone disipative. În general, îmbinările pot fi proiectateca şi îmbinări disipative (deformaiile plastice au loc în îmbinarea propriu-zisă) sau ca îmbinări nedisipative(deformaiile plastice au loc în elementele îmbinate). Datorită complexităii comportării îmbinărilor încondiii seismice (solicitări ciclice în domeniul inelastic în îmbinări sau în elementele îmbinate), detaliileconstructive şi modul de calcul al îmbinărilor folosite trebuie să fie validate prin încercări experimentale. Îngeneral, derularea unor încercări experimentale pentru proiectarea unor construcii curente nu esteeconomică. De aceea, în practică, detalierea şi calculul îmbinărilor structurilor disipative se bazează peinformaii disponibile în literatură sau prescripii de specialitate (de exemplu GP 082/2003 sau ANSI/AISC358-05), elaborate pe baza unor programe de încercări experimentale.
Îmbinările disipative, pe lângă criteriile de rigiditate şi rezistenă trebuie să îndeplinească şi cerine deductilitate (validate experimental), impuse de normele seismice funcie de tipul structurii şi clasa deductilitate.
F O R T A
element disipativcomportare probabila
R fy
γ ov R fy
1.1γ ov R fy
Rd
imbinarenedisipativa
element disipativcomportare de calcul
Figura 7.3. Principiul de dimensionare a îmbinărilor nedisipative.
Îmbinările nedisipative aflate în vecinătatea zonelor disipative trebuie proiectate să rămână în domeniulelastic, asigurând dezvoltarea deformaiilor inelastice în zonele disipative ale elementelor îmbinate. În acestscop, îmbinările nedisipative trebuie proiectate la eforturi corespunzătoare unor zone disipative plasticizate şiconsolidate, şi nu pe baza eforturilor din îmbinare determinate din analiza structurală. Acest principiu decalcul are la bază proiectarea bazată pe capacitate, vezi seciunea 6.10.1. Relaia de verificare se poate
exprima generic sub forma:ov1.1d fy R Rγ ≥ (7.1)
unde:
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 126/149
7. Proiectarea seismică a structurilor metalice
125
Rd rezistena îmbinării
R fy rezistena plastică a elementului îmbinat, determinată pe baza limitei de curgere de calcul
1.1 un factor care ine cont de consolidarea (ecruisarea) zonei disipative
γ ov un factor de suprarezistenă care ine cont de o limită de curgere reală mai mare decât ceacaracteristică a zonei disipative (valoarea normativă a suprarezistenei, în lipsa unor încercări experimentale
este egală cu 1.25)Principiul de dimensionare a îmbinărilor nedisipative care îmbină elemente structurale disipative esteprezentat schematic în Figura 7.3.
Cu toate că majoritatea normelor seismice moderne (EN 1998-1, 2003; AISC, 2005) acceptă folosirea unor îmbinări disipative la structurile metalice, normativul P100-1 (2006) permite doar utilizarea îmbinărilornedisipative.
7.3.5. Ductilitatea structurii
Ductilitatea la nivel de structură se asigură prin ierarhizarea rezistenei elementelor structurale urmărindprincipiile de proiectare bazată pe capacitate, pentru a localiza deformaiile plastice în elementele ductile şi a
evita cedarea în elementele fragile. Suplimentar, în scopul obinerii unei ductilităi globale corespunzătoarela structurile multietajate, este necesară asigurarea unui mecanism plastic global a structurii (vezi Figura6.26a). Acest mecanism asigură un număr maxim de zone plastice şi o solicitare uniformă a acestora. Trebuieevitate mecanismele plastice de nivel (vezi Figura 6.26b), deoarece în acest caz deformaiile inelastice suntconcentrate într-un număr redus de zone plastice, având cerine de deformaii inelastice mai ridicate decât încazul unui mecanism plastic global, la aceeaşi deplasare globală a structurii.
7.4. Cadre metalice necontravântuite
Cadrele metalice necontravântuite (vezi Tabelul 7.2) preiau încărcările laterale prin încovoierea grinzilor şi astâlpilor. La acest tip de structuri nodurile riglă-stâlp trebuie să fie de tip rigid. Cadrele necontravântuite au oductilitate excelentă (factorii de comportare ridicai din Tabelul 7.2), dar sunt relativ flexibile în comparaiecu cadrele contravântuite centric sau excentric.
Zonele disipative la cadrele necontravântuite sunt amplasate la capetele grinzilor, iar elementele nedisipativesunt stâlpii. Aceasta se datorează faptului că stâlpii sunt în general mai puini ductili decât riglele, fiindsupuşi nu doar la momente încovoietoare, ci şi la fore axiale importante. În plus, formarea articulaiilorplastice în stâlpi ar conduce la formarea unui mecanism plastic de nivel (local). Se permite formareaarticulaiilor plastice şi în stâlpi în următoarele situaii: la baza structurii, la partea superioară a stâlpilor de laultimul nivel al structurilor multietajate şi la structurile parter cu fore axiale mici în stâlpi. Aceste cerinereflectă practic condiia de formare a unui mecanism plastic de tip global. Conform normei seismiceromâneşti P100-1 (2006), îmbinările riglă-stâlp constituie zone nedisipative. Cu toate acestea, alte normeseismice moderne (EN 1998-1, 2003; AISC, 2005) acceptă folosirea îmbinărilor ca şi zone disipative, cucondiia validării experimentale a capacităii de deformare în domeniul inelastic al îmbinărilor.
Ductilitatea de ansamblu excelentă a cadrelor necontravântuite se datorează faptului că deformaiile plasticede încovoiere, formate la capetele grinzilor, reprezintă un mod de cedare forte ductil. Totuşi, ductilitatea şimomentul capabil al grinzilor pot fi reduse dacă, pe lângă încovoiere, elementul structural este supus unoreforturi de compresiune şi/sau forfecare importante. Pentru a limita aceste fenomene, P100-1 (2006)foloseşte următoarele relaii pentru verificarea grinzilor care conin zone disipative (în care se pot formaarticulaii plastice):
,
1.0Ed
pl Rd
M
M ≤ (7.2)
,
0.15Ed
pl Rd
N
N ≤ (7.3)

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 127/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
126
, ,,
0.5Ed Ed Ed G Ed M
pl Rd
V V V V
V ≤ = + (7.4)
unde: M ed şi N ed - momentul încovoietor şi fora axială de proiectare din combinaia seismică de încărcări M pl,Rd , V pl,Rd şi N pl,Rd - momentul încovoietor, fora tăietoare şi fora axială capabile ale seciunii
Relaia (7.2) asigură capacitatea portantă a grinzii la moment încovoietor, în timp ce relaiile (7.3) şi (7.4)limitează efectele forei axiale, respectiv a forei tăietoare asupra momentului capabil şi asupra ductilităiizonei disipative. Fora tăietoare V Ed prezentă într-o grindă cu articulaii plastice formate la capete poate fisubstanial mai mare decât cea estimată din calculul static al structurii în combinaia seismică. De aceea,valoarea forei tăietoare de calcul se determină prin însumarea contribuiei încărcării gravitaionale (V ed,G) şia celei corespunzătoare formării articulaiilor plastice la cele două capete ale grinzii (V ed,G= M pl,Rd,A+
M pl,Rd,A /L), vezi Figura 7.4.
VEd,G
Mpl,Rd,A Mpl,Rd,B
VEd,G VEd,M VEd,M VEd
Mpl,Rd,A
Mpl,Rd,B
VEd
L L L
Figura 7.4. Evaluarea forei tăietoare de calcul într-o grindă cu articulaii plastice.
Stâlpii sunt elemente nedisipative, dimensionarea acestora având la bază cerina de a evita formareaiarticulaiilor plastice. Eforturile de calcul din stâlpi obinute din combinaia seismică de încărcări vor fidepăşite în timpul unui cutremur, deoarece forele seismice de calcul sunt reduse faă de celecorespunzătoare unui răspuns elastic al structurii cu valoarea factorului de comportare q. Eforturile folosite ladimensionarea stâlpilor trebuie să corespundă formării unui mecanism plastic prin plasticizarea grinzilor.Pentru aceasta ar fi necesar un calcul plastic, care însă nu se justifică în practica de proiectare curentă. Deaceea, normele de proiectare seismică oferă metode aproximative de estimare a eforturilor din stâlpi, care să
le asigure o suprarezistenă faă de grinzi. P100-1 (2006) foloseşte următoarele relaii pentru determinareaeforturilor de calcul în stâlpi:
, ,1.1 M Ed Ed G ov Ed E N N N γ = + Ω (7.5)
, ,1.1 M Ed Ed G ov Ed E M M M γ = + Ω (7.6)
, ,1.1 M Ed Ed G ov Ed E V V V γ = + Ω (7.7)
unde: N Ed,G, M Ed,G, V Ed,G – efortul axial, momentul încovoietor şi fora tăietoare în stâlp din aciunile neseismice
coninute în gruparea de încărcări care include aciunea seismică N Ed,E , M Ed,E , V Ed,E – efortul axial, momentul încovoietor şi fora tăietoare în stâlp din aciunile seismice de
proiectare.Ω M reprezintă rezerva de rezistenă a grinzilor faă de momentul încovoietor de calcul din gruparea
seismică şi, conform P100-1 (2006) reprezintă valoarea maximă a raportului , , , M i pl Rd i Ed i M M Ω =
calculat pentru fiecare grindă.
Relaiile (7.5) - (7.7) estimează eforturile din stâlpi corespunzătoare formării unui mecanism plastic înstructură, atunci când în elementele disipative (grinzi) se formează articulaii plastice. Natura acestor relaiipoate fi explicată folosind Figura 7.5. Forele seismice de proiectare F Ed sunt reduse faă de celecorespunzătoare unui răspuns elastic al structurii şi sunt folosite pentru dimensionarea elementelor disipativeale structurii. Datorită suprarezistenei de proiectare şi a redundanei, la formarea mecanismului plasticforele seismice F mec vor fi mai mari decât cele de proiectare. Valoarea F mec poate fi estimată amplificândfora seismică de proiectare F Ed cu suprarezistena totală (care este estimată de normă prin factorul
1.1 M ovγ Ω = Ω ). Încărcările gravitaionale aferente combinaiei seismice de încărcări sunt constante pe durata
aciunii seismice. De aceea, eforturile din elementele nedisipative (stâlpi) la formarea mecanismului plasticpot fi estimate ca fiind suma contribuiei încărcărilor gravitaionale ( N Ed,G, M Ed,G, V Ed,G) şi a încărcărilor
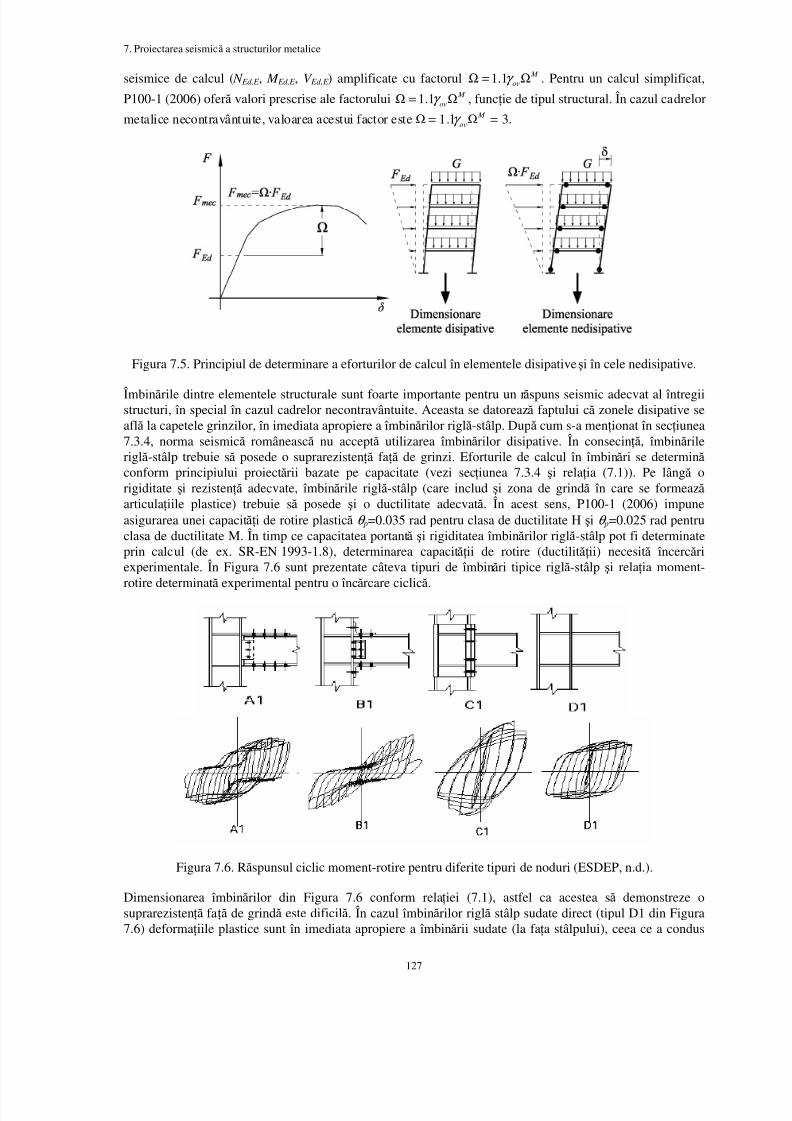
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 128/149
7. Proiectarea seismică a structurilor metalice
127
seismice de calcul ( N Ed,E , M Ed,E , V Ed,E ) amplificate cu factorul 1.1 M ovγ Ω = Ω . Pentru un calcul simplificat,
P100-1 (2006) oferă valori prescrise ale factorului 1.1 M ovγ Ω = Ω , funcie de tipul structural. În cazul cadrelor
metalice necontravântuite, valoarea acestui factor este 1.1 3 M ovγ Ω = Ω = .
Figura 7.5. Principiul de determinare a eforturilor de calcul în elementele disipative şi în cele nedisipative.
Îmbinările dintre elementele structurale sunt foarte importante pentru un răspuns seismic adecvat al întregiistructuri, în special în cazul cadrelor necontravântuite. Aceasta se datorează faptului că zonele disipative seaflă la capetele grinzilor, în imediata apropiere a îmbinărilor riglă-stâlp. După cum s-a menionat în seciunea7.3.4, norma seismică românească nu acceptă utilizarea îmbinărilor disipative. În consecină, îmbinărileriglă-stâlp trebuie să posede o suprarezistenă faă de grinzi. Eforturile de calcul în îmbinări se determină conform principiului proiectării bazate pe capacitate (vezi seciunea 7.3.4 şi relaia (7.1)). Pe lângă origiditate şi rezistenă adecvate, îmbinările riglă-stâlp (care includ şi zona de grindă în care se formează articulaiile plastice) trebuie să posede şi o ductilitate adecvată. În acest sens, P100-1 (2006) impuneasigurarea unei capacităi de rotire plastică θ p=0.035 rad pentru clasa de ductilitate H şi θ p=0.025 rad pentru
clasa de ductilitate M. În timp ce capacitatea portantă şi rigiditatea îmbinărilor riglă-stâlp pot fi determinateprin calcul (de ex. SR-EN 1993-1.8), determinarea capacităii de rotire (ductilităii) necesită încercăriexperimentale. În Figura 7.6 sunt prezentate câteva tipuri de îmbinări tipice riglă-stâlp şi relaia moment-rotire determinată experimental pentru o încărcare ciclică.
Figura 7.6. Răspunsul ciclic moment-rotire pentru diferite tipuri de noduri (ESDEP, n.d.).
Dimensionarea îmbinărilor din Figura 7.6 conform relaiei (7.1), astfel ca acestea să demonstreze osuprarezistenă faă de grindă este dificilă. În cazul îmbinărilor riglă stâlp sudate direct (tipul D1 din Figura7.6) deformaiile plastice sunt în imediata apropiere a îmbinării sudate (la faa stâlpului), ceea ce a condus
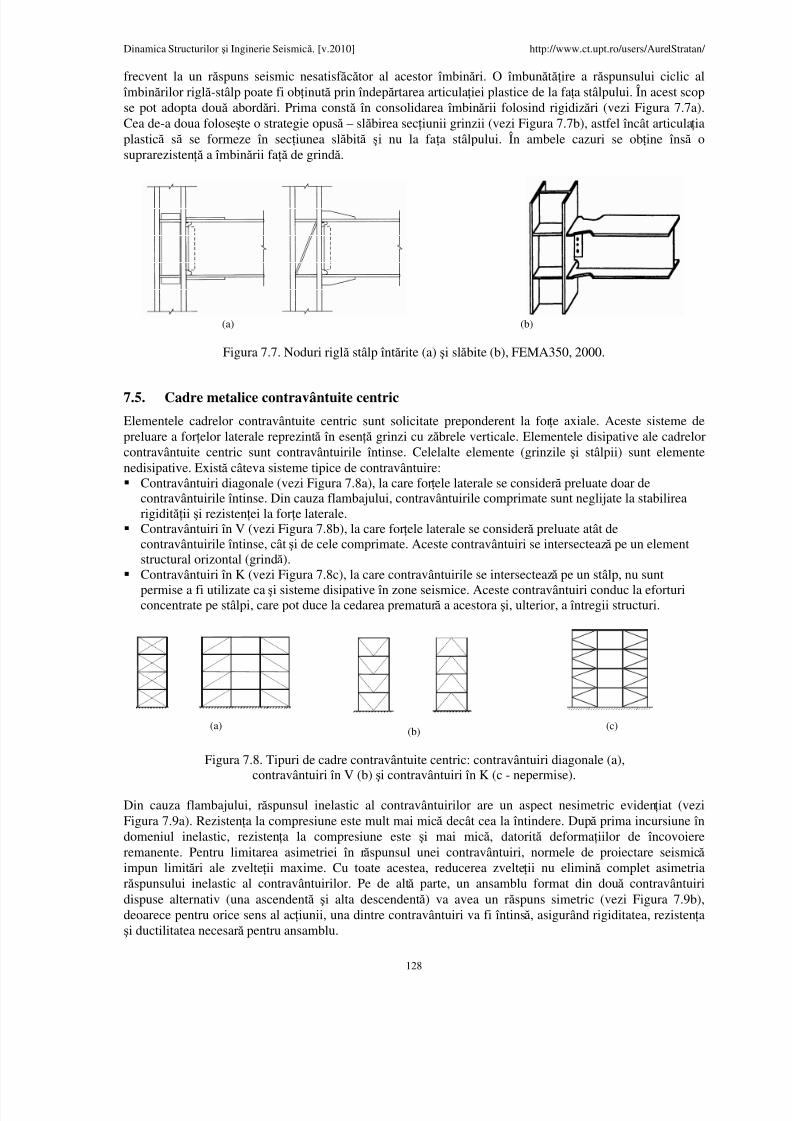
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 129/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
128
frecvent la un răspuns seismic nesatisf ăcător al acestor îmbinări. O îmbunătăire a răspunsului ciclic al îmbinărilor riglă-stâlp poate fi obinută prin îndepărtarea articulaiei plastice de la faa stâlpului. În acest scopse pot adopta două abordări. Prima constă în consolidarea îmbinării folosind rigidizări (vezi Figura 7.7a).Cea de-a doua foloseşte o strategie opusă – slăbirea seciunii grinzii (vezi Figura 7.7b), astfel încât articulaiaplastică să se formeze în seciunea slăbită şi nu la faa stâlpului. În ambele cazuri se obine însă osuprarezistenă a îmbinării faă de grindă.
(a) (b)
Figura 7.7. Noduri riglă stâlp întărite (a) şi slăbite (b), FEMA350, 2000.
7.5. Cadre metalice contravântuite centric
Elementele cadrelor contravântuite centric sunt solicitate preponderent la fore axiale. Aceste sisteme depreluare a forelor laterale reprezintă în esenă grinzi cu zăbrele verticale. Elementele disipative ale cadrelorcontravântuite centric sunt contravântuirile întinse. Celelalte elemente (grinzile şi stâlpii) sunt elementenedisipative. Există câteva sisteme tipice de contravântuire: Contravântuiri diagonale (vezi Figura 7.8a), la care forele laterale se consideră preluate doar de
contravântuirile întinse. Din cauza flambajului, contravântuirile comprimate sunt neglijate la stabilirearigidităii şi rezistenei la fore laterale.
Contravântuiri în V (vezi Figura 7.8b), la care forele laterale se consideră preluate atât decontravântuirile întinse, cât şi de cele comprimate. Aceste contravântuiri se intersectează pe un elementstructural orizontal (grindă).
Contravântuiri în K (vezi Figura 7.8c), la care contravântuirile se intersectează pe un stâlp, nu suntpermise a fi utilizate ca şi sisteme disipative în zone seismice. Aceste contravântuiri conduc la eforturiconcentrate pe stâlpi, care pot duce la cedarea prematură a acestora şi, ulterior, a întregii structuri.
(a) (b) (c)
Figura 7.8. Tipuri de cadre contravântuite centric: contravântuiri diagonale (a),contravântuiri în V (b) şi contravântuiri în K (c - nepermise).
Din cauza flambajului, răspunsul inelastic al contravântuirilor are un aspect nesimetric evideniat (veziFigura 7.9a). Rezistena la compresiune este mult mai mică decât cea la întindere. După prima incursiune îndomeniul inelastic, rezistena la compresiune este şi mai mică, datorită deformaiilor de încovoiereremanente. Pentru limitarea asimetriei în răspunsul unei contravântuiri, normele de proiectare seismică impun limitări ale zvelteii maxime. Cu toate acestea, reducerea zvelteii nu elimină complet asimetriarăspunsului inelastic al contravântuirilor. Pe de altă parte, un ansamblu format din două contravântuiridispuse alternativ (una ascendentă şi alta descendentă) va avea un răspuns simetric (vezi Figura 7.9b),deoarece pentru orice sens al aciunii, una dintre contravântuiri va fi întinsă, asigurând rigiditatea, rezistenaşi ductilitatea necesară pentru ansamblu.

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 130/149
7. Proiectarea seismică a structurilor metalice
129
La calculul cadrelor cu contravântuiri diagonale, aportul contravântuirilor comprimate este neglijat. Structurape ansamblu trebuie însă să posede o rezistenă şi rigiditate similare pentru ambele sensuri ale aciuniiseismice. De aceea, structurile cu contravântuiri diagonale trebuie să aibă un număr apropiat decontravântuiri ascendente şi descendente, pentru a asigura un răspuns cât mai simetric al structurii peransamblu. Structurile din Figura 7.8a reprezintă un exemplu de dispunere corectă a contravântuirilor.
(a) (b)
Figura 7.9. Răspunsul ciclic al unei contravântuiri izolate (a) şi a unui ansamblu format din două contravântuiri dispuse alternativ (b), Tremblay, 2003.
O structură disipativă proiectată pe baza unui factor de comportare supraunitar va suferi inevitabil deformaii în domeniul inelastic sub efectul aciunii seismice de calcul la SLU. Elementele structurale care vor fi
avariate în timpul unui cutremur sunt în primul rând cele disipative, care la cadrele contravântuite suntreprezentate de contravântuiri. Acestea din urmă vor avea o rezistenă la compresiune neglijabilă în urmaunor incursiuni în domeniul inelastic. Astfel, contravântuirile pot fi scoase complet din uz în urma aciuniiseismice. De aceea, unul dintre criteriile de proiectare impuse acestui sistem structural de c ătre normele deproiectare seismică (P100-1, 2006; EN 1998-1, 2003) îl constituie verificarea ca structura să poată preluaforele gravitaionale prezente în gruparea seismică în absena contravântuirilor.
Grinzile şi stâlpii fiind elemente nedisipative, trebuie dimensionate pentru a avea o suprarezisten ă faă deelementele disipative. Principiul de evaluare al eforturilor de calcul din elementele nedisipative este acelaşicu cel descris pentru cadrele necontravântuite. Astfel, eforturile de calcul din grinzi şi stâlpi se evaluează conform unor relaii similare cu (7.5)-(7.6), doar că Ω M este înlocuit cu Ω N şi reprezintă rezerva de rezistenă a contravântuirilor faă de fora axială de calcul din gruparea seismică şi, conform P100-1 (2006) reprezintă
valoarea maximă a raportului , , , N i pl Rd i Ed i N N Ω = calculat pentru fiecare contravântuire.
Npl,Rd 0.3Npl,Rd
Figura 7.10. Modelarea efectului flambajului contravântuirii comprimate asupra grinzilor la cadrelecontravântuite în V.
La cadrele contravântuite în V se iau în calcul atât contravântuirile întinse, cât şi cele comprimate, deoarece
aceste structuri se proiectează pe baza unor factori de comportare mici, ceea ce implică deformaii inelasticereduse. Ductilitatea redusă a acestui tip structural se datorează solicitărilor puternice impuse grinzilor după flambajul contravântuirii comprimate, care pot duce la cedarea grinzilor şi la pierderea rezistenei şirigidităii globale a structurii. Pentru a limita acest fenomen, grinzile pe care se intersectează contravântuirile
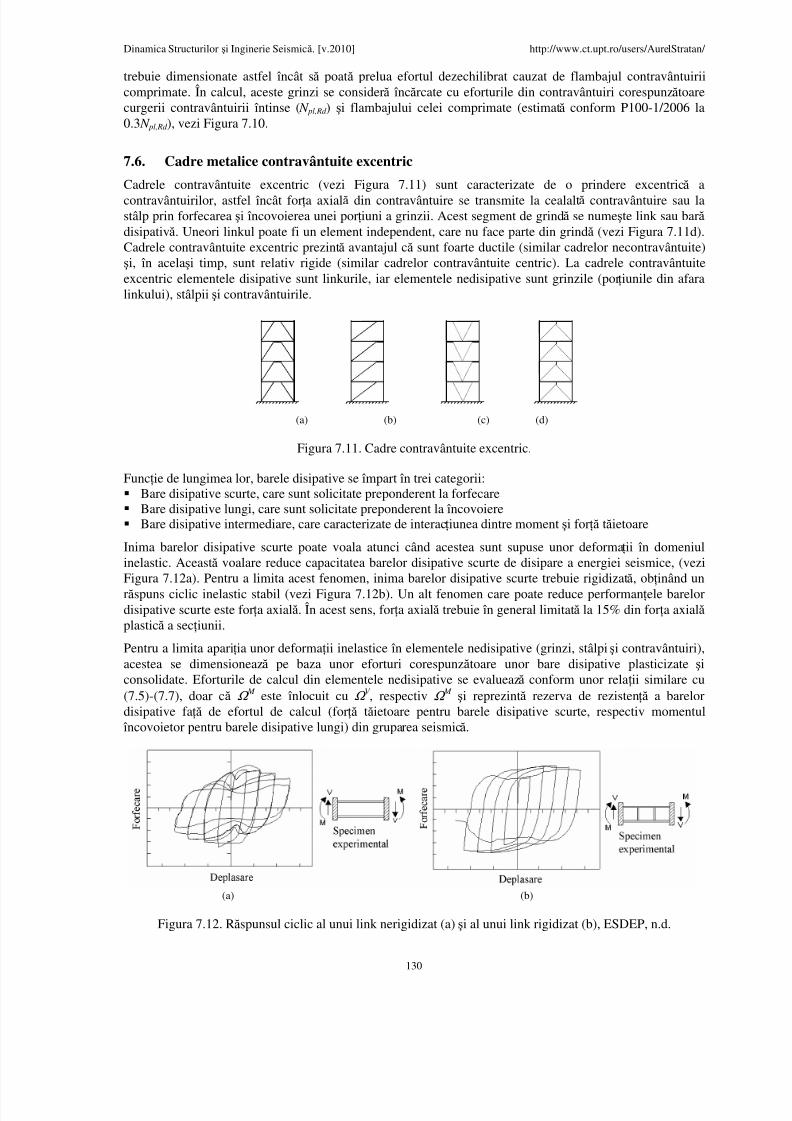
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 131/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
130
trebuie dimensionate astfel încât să poată prelua efortul dezechilibrat cauzat de flambajul contravântuiriicomprimate. În calcul, aceste grinzi se consideră încărcate cu eforturile din contravântuiri corespunzătoarecurgerii contravântuirii întinse ( N pl,Rd ) şi flambajului celei comprimate (estimată conform P100-1/2006 la0.3 N pl,Rd ), vezi Figura 7.10.
7.6. Cadre metalice contravântuite excentric
Cadrele contravântuite excentric (vezi Figura 7.11) sunt caracterizate de o prindere excentrică acontravântuirilor, astfel încât fora axială din contravântuire se transmite la cealaltă contravântuire sau lastâlp prin forfecarea şi încovoierea unei poriuni a grinzii. Acest segment de grindă se numeşte link sau bară disipativă. Uneori linkul poate fi un element independent, care nu face parte din grindă (vezi Figura 7.11d).Cadrele contravântuite excentric prezintă avantajul că sunt foarte ductile (similar cadrelor necontravântuite)şi, în acelaşi timp, sunt relativ rigide (similar cadrelor contravântuite centric). La cadrele contravântuiteexcentric elementele disipative sunt linkurile, iar elementele nedisipative sunt grinzile (poriunile din afaralinkului), stâlpii şi contravântuirile.
(a) (b) (c) (d)
Figura 7.11. Cadre contravântuite excentric.
Funcie de lungimea lor, barele disipative se împart în trei categorii: Bare disipative scurte, care sunt solicitate preponderent la forfecare Bare disipative lungi, care sunt solicitate preponderent la încovoiere Bare disipative intermediare, care caracterizate de interaciunea dintre moment şi foră tăietoare
Inima barelor disipative scurte poate voala atunci când acestea sunt supuse unor deformaii în domeniulinelastic. Această voalare reduce capacitatea barelor disipative scurte de disipare a energiei seismice, (veziFigura 7.12a). Pentru a limita acest fenomen, inima barelor disipative scurte trebuie rigidizată, obinând unrăspuns ciclic inelastic stabil (vezi Figura 7.12b). Un alt fenomen care poate reduce performan ele barelordisipative scurte este fora axială. În acest sens, fora axială trebuie în general limitată la 15% din fora axială plastică a seciunii.
Pentru a limita apariia unor deformaii inelastice în elementele nedisipative (grinzi, stâlpi şi contravântuiri),acestea se dimensionează pe baza unor eforturi corespunzătoare unor bare disipative plasticizate şiconsolidate. Eforturile de calcul din elementele nedisipative se evaluează conform unor relaii similare cu(7.5)-(7.7), doar că Ω M este înlocuit cu Ω V , respectiv Ω M şi reprezintă rezerva de rezistenă a barelor
disipative faă de efortul de calcul (foră tăietoare pentru barele disipative scurte, respectiv momentul încovoietor pentru barele disipative lungi) din gruparea seismică.
(a) (b)
Figura 7.12. Răspunsul ciclic al unui link nerigidizat (a) şi al unui link rigidizat (b), ESDEP, n.d.
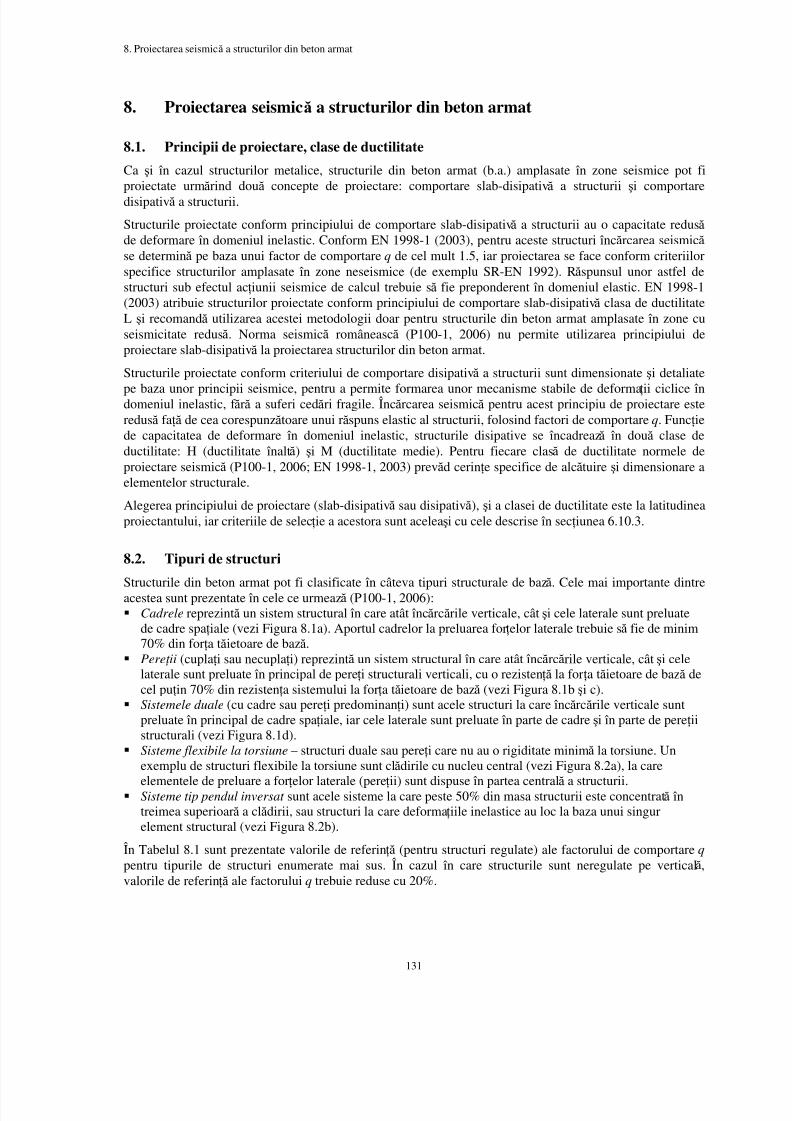
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 132/149
8. Proiectarea seismică a structurilor din beton armat
131
8. Proiectarea seismică a structurilor din beton armat
8.1. Principii de proiectare, clase de ductilitate
Ca şi în cazul structurilor metalice, structurile din beton armat (b.a.) amplasate în zone seismice pot fiproiectate urmărind două concepte de proiectare: comportare slab-disipativă a structurii şi comportaredisipativă a structurii.
Structurile proiectate conform principiului de comportare slab-disipativă a structurii au o capacitate redusă de deformare în domeniul inelastic. Conform EN 1998-1 (2003), pentru aceste structuri încărcarea seismică se determină pe baza unui factor de comportare q de cel mult 1.5, iar proiectarea se face conform criteriilorspecifice structurilor amplasate în zone neseismice (de exemplu SR-EN 1992). Răspunsul unor astfel destructuri sub efectul aciunii seismice de calcul trebuie să fie preponderent în domeniul elastic. EN 1998-1(2003) atribuie structurilor proiectate conform principiului de comportare slab-disipativă clasa de ductilitateL şi recomandă utilizarea acestei metodologii doar pentru structurile din beton armat amplasate în zone cuseismicitate redusă. Norma seismică românească (P100-1, 2006) nu permite utilizarea principiului de
proiectare slab-disipativă la proiectarea structurilor din beton armat.Structurile proiectate conform criteriului de comportare disipativă a structurii sunt dimensionate şi detaliatepe baza unor principii seismice, pentru a permite formarea unor mecanisme stabile de deformaii ciclice îndomeniul inelastic, f ără a suferi cedări fragile. Încărcarea seismică pentru acest principiu de proiectare esteredusă faă de cea corespunzătoare unui răspuns elastic al structurii, folosind factori de comportare q. Funciede capacitatea de deformare în domeniul inelastic, structurile disipative se încadrează în două clase deductilitate: H (ductilitate înaltă) şi M (ductilitate medie). Pentru fiecare clasă de ductilitate normele deproiectare seismică (P100-1, 2006; EN 1998-1, 2003) prevăd cerine specifice de alcătuire şi dimensionare aelementelor structurale.
Alegerea principiului de proiectare (slab-disipativă sau disipativă), şi a clasei de ductilitate este la latitudineaproiectantului, iar criteriile de selecie a acestora sunt aceleaşi cu cele descrise în seciunea 6.10.3.
8.2. Tipuri de structuri
Structurile din beton armat pot fi clasificate în câteva tipuri structurale de bază. Cele mai importante dintreacestea sunt prezentate în cele ce urmează (P100-1, 2006): Cadrele reprezintă un sistem structural în care atât încărcările verticale, cât şi cele laterale sunt preluate
de cadre spaiale (vezi Figura 8.1a). Aportul cadrelor la preluarea forelor laterale trebuie să fie de minim70% din fora tăietoare de bază.
Pere ii (cuplai sau necuplai) reprezintă un sistem structural în care atât încărcările verticale, cât şi celelaterale sunt preluate în principal de perei structurali verticali, cu o rezistenă la fora tăietoare de bază decel puin 70% din rezistena sistemului la fora tăietoare de bază (vezi Figura 8.1b şi c).
Sistemele duale (cu cadre sau perei predominani) sunt acele structuri la care încărcările verticale suntpreluate în principal de cadre spaiale, iar cele laterale sunt preluate în parte de cadre şi în parte de pereiistructurali (vezi Figura 8.1d).
Sisteme flexibile la torsiune – structuri duale sau perei care nu au o rigiditate minimă la torsiune. Unexemplu de structuri flexibile la torsiune sunt clădirile cu nucleu central (vezi Figura 8.2a), la careelementele de preluare a forelor laterale (pereii) sunt dispuse în partea centrală a structurii.
Sisteme tip pendul inversat sunt acele sisteme la care peste 50% din masa structurii este concentrată întreimea superioară a clădirii, sau structuri la care deformaiile inelastice au loc la baza unui singurelement structural (vezi Figura 8.2b).
În Tabelul 8.1 sunt prezentate valorile de referină (pentru structuri regulate) ale factorului de comportare q pentru tipurile de structuri enumerate mai sus. În cazul în care structurile sunt neregulate pe verticală,valorile de referină ale factorului q trebuie reduse cu 20%.
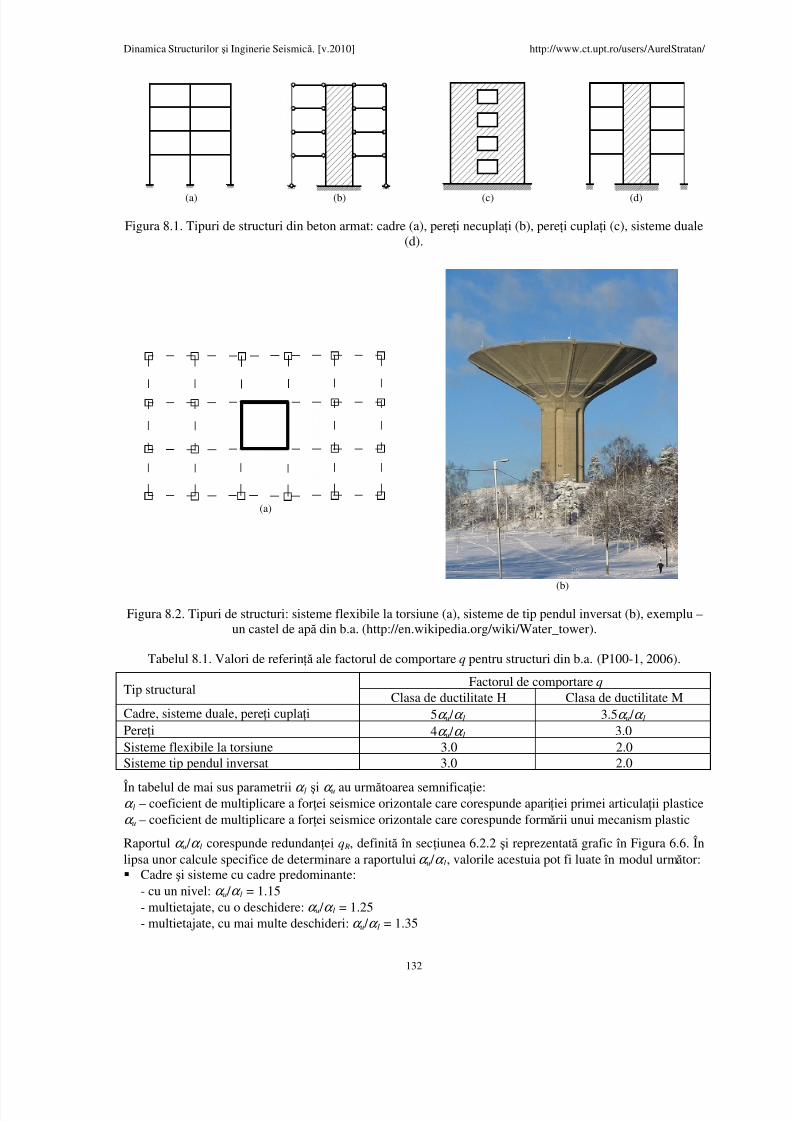
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 133/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
132
(a) (b) (c) (d)
Figura 8.1. Tipuri de structuri din beton armat: cadre (a), perei necuplai (b), perei cuplai (c), sisteme duale(d).
(a)
(b)
Figura 8.2. Tipuri de structuri: sisteme flexibile la torsiune (a), sisteme de tip pendul inversat (b), exemplu –un castel de apă din b.a. (http://en.wikipedia.org/wiki/Water_tower).
Tabelul 8.1. Valori de referină ale factorul de comportare q pentru structuri din b.a. (P100-1, 2006).
Factorul de comportare qTip structural
Clasa de ductilitate H Clasa de ductilitate M
Cadre, sisteme duale, perei cuplai 5α u / α 1 3.5α u / α 1 Perei 4α u / α 1 3.0Sisteme flexibile la torsiune 3.0 2.0Sisteme tip pendul inversat 3.0 2.0
În tabelul de mai sus parametrii α 1 şi α u au următoarea semnificaie:α 1 – coeficient de multiplicare a forei seismice orizontale care corespunde apariiei primei articulaii plasticeα u – coeficient de multiplicare a forei seismice orizontale care corespunde formării unui mecanism plastic
Raportul α u / α 1 corespunde redundanei q R, definită în seciunea 6.2.2 şi reprezentată grafic în Figura 6.6. Înlipsa unor calcule specifice de determinare a raportului α u / α 1, valorile acestuia pot fi luate în modul următor: Cadre şi sisteme cu cadre predominante:
- cu un nivel: α u / α 1 = 1.15- multietajate, cu o deschidere: α u / α 1 = 1.25- multietajate, cu mai multe deschideri: α u / α 1 = 1.35

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 134/149
8. Proiectarea seismică a structurilor din beton armat
133
Perei şi sisteme cu perei predominani:- sisteme cu maxim doi perei necuplai pe fiecare direcie orizontală: α u / α 1 = 1.0- sisteme cu mai mult de doi perei pe fiecare direcie transversală: α u / α 1 = 1.15- sisteme duale cu perei predominani sau perei cuplai: α u / α 1 = 1.25
Atunci când acest raport este determinat prin calcul, pot rezulta valori mai mari decât cele de mai sus. Totuşi,P100-1 (2006) limitează acest raport la valoarea 1.6.
Analizând valorile factorilor de comportare pentru diferite tipuri de structuri din b.a. (Tabelul 8.1), se poateconcluziona că cele mai ductile structuri din b.a. sunt cadrele, sistemele duale şi pereii cuplai (valorile celemai mari ale factorilor de comportare q). Urmează pereii structurali, cu valori puin mai mici ale factorilorde comportare de referină. Pentru toate categoriile menionate mai sus, valoarea factorului de comportare q este în strânsă legătură cu redundana structurii (α u / α 1). Redundana structurii şi, în consecină, şi factorul decomportare cresc dacă structura are un grad de nedeterminare statică mai mare (o redundană mai mare).
8.3. Ductilitatea structurilor din b.a.
Proiectarea structurilor din b.a. conform principiului de comportare disipativă a structurii necesită obinereaunei comportări ductile la nivelul întregii structuri. În acest scop este necesară asigurarea unei ductilităi
corespunzătoare la nivel de material, seciune, element, noduri şi structură.
8.3.1. Ductilitatea materialelor
Betonul simplu este un material care are o rezistenă la întindere mult mai mică decât la compresiune, fiind în general neglijată în practica inginerească. Rezistena la compresiune a betonului ( f ck ) este determinată pecilindri standard sau pe cuburi standard la 28 de zile de la confecionare. În Figura 8.3a sunt prezentatecâteva curbe tensiune – deformaie specifică pentru betoane de diferite clase. Se poate observa că odată cucreşterea clasei betonului (a rezistenei la compresiune f ck ) ductilitatea acestuia scade. Ductilitatea betonuluica şi material este exprimată prin deformaia specifică ultimă ε cu. Clasele uzuale de beton au deformaiispecifice ultime ε cu de ordinul a 0.0035.
Relaia efort tensiune – deformaie specifică a oelului din armături este caracterizată de o poriune elastică,până la atingerea limitei de curgere, urmată de un platou de curgere, iar apoi de o poriune de ecruisare. ÎnFigura 8.3b sunt prezentate câteva curbe caracteristice efort tensiune – deformaie specifică pentru oeluri culimita de curgere diferită. Se poate observa că deformaia specifică la fora maximă ε uk (folosită pentru acaracteriza ductilitatea oelului din armături) scade pentru oeluri cu limita de curgere superioară. Funcie declasa de ductilitate a construciei, normele impun valori minime ale deformaiei specifice la fora maximă care trebuie să fie îndeplinite de armătură: ε uk ≥0.075 pentru clasa de ductilitate H şi ε uk ≥0.05 pentru clasa deductilitate M (SR EN 1992 şi P100-1, 2006). Oelul folosit în armături este sursa principală de ductilitate abetonului armat, deformaia specifică ultimă a acestuia fiind de 40-50 ori mai mare decât cea a betonului.
(a)(b)
Figura 8.3. Curbe tensiune – deformaie specifică pentru betoane de diferite clase (a) şi oeluri cu diferitevalori ale limitei de curgere (b), Paulay şi Priestley, 1992.
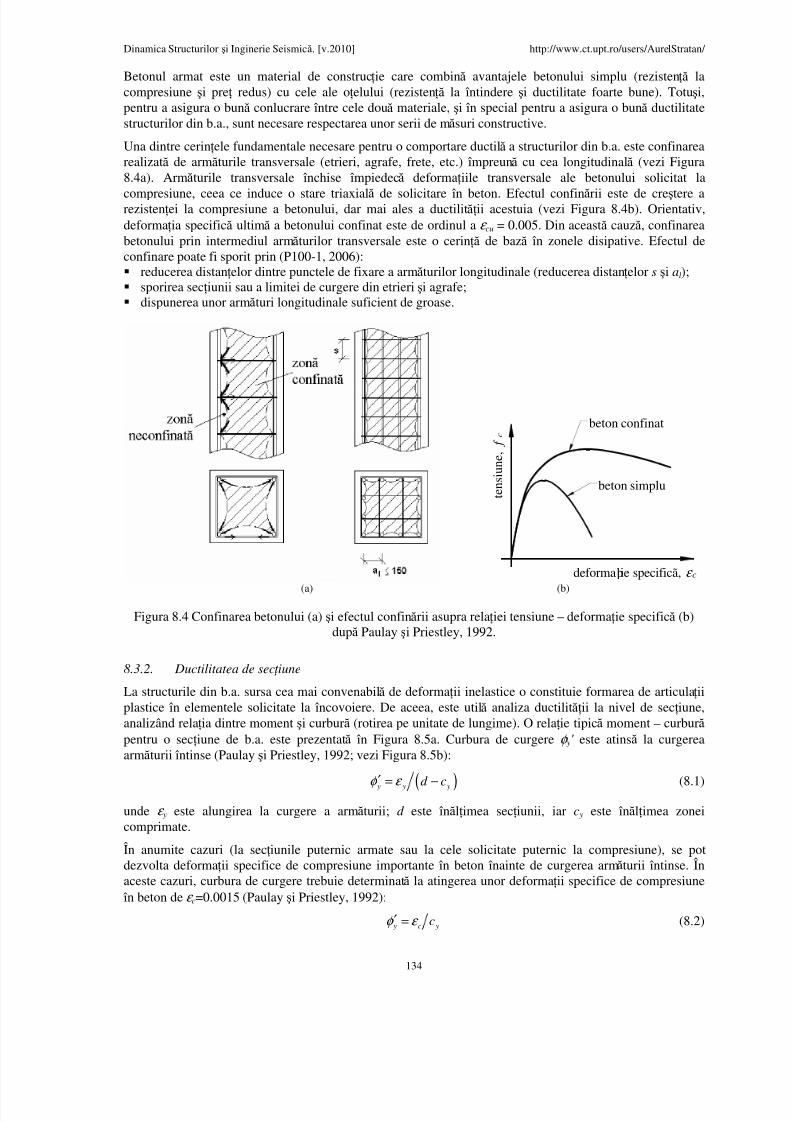
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 135/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
134
Betonul armat este un material de construcie care combină avantajele betonului simplu (rezistenă lacompresiune şi pre redus) cu cele ale oelului (rezistenă la întindere şi ductilitate foarte bune). Totuşi,pentru a asigura o bună conlucrare între cele două materiale, şi în special pentru a asigura o bună ductilitatestructurilor din b.a., sunt necesare respectarea unor serii de măsuri constructive.
Una dintre cerinele fundamentale necesare pentru o comportare ductilă a structurilor din b.a. este confinarearealizată de armăturile transversale (etrieri, agrafe, frete, etc.) împreună cu cea longitudinală (vezi Figura
8.4a). Armăturile transversale închise împiedecă deformaiile transversale ale betonului solicitat lacompresiune, ceea ce induce o stare triaxială de solicitare în beton. Efectul confinării este de creştere arezistenei la compresiune a betonului, dar mai ales a ductilităii acestuia (vezi Figura 8.4b). Orientativ,deformaia specifică ultimă a betonului confinat este de ordinul a ε cu = 0.005. Din această cauză, confinareabetonului prin intermediul armăturilor transversale este o cerină de bază în zonele disipative. Efectul deconfinare poate fi sporit prin (P100-1, 2006): reducerea distanelor dintre punctele de fixare a armăturilor longitudinale (reducerea distanelor s şi al); sporirea seciunii sau a limitei de curgere din etrieri şi agrafe; dispunerea unor armături longitudinale suficient de groase.
beton simplu
deformaþie specificã, ε c
t e n s i u n e ,
f c
beton confinat
(a) (b)
Figura 8.4 Confinarea betonului (a) şi efectul confinării asupra relaiei tensiune – deformaie specifică (b)după Paulay şi Priestley, 1992.
8.3.2. Ductilitatea de sec iune
La structurile din b.a. sursa cea mai convenabilă de deformaii inelastice o constituie formarea de articulaii
plastice în elementele solicitate la încovoiere. De aceea, este utilă analiza ductilităii la nivel de seciune,analizând relaia dintre moment şi curbură (rotirea pe unitate de lungime). O relaie tipică moment – curbură pentru o seciune de b.a. este prezentată în Figura 8.5a. Curbura de curgere φ y' este atinsă la curgereaarmăturii întinse (Paulay şi Priestley, 1992; vezi Figura 8.5b):
( ) y y yd cφ ε ′ = − (8.1)
unde ε y este alungirea la curgere a armăturii; d este înălimea seciunii, iar c y este înălimea zoneicomprimate.
În anumite cazuri (la seciunile puternic armate sau la cele solicitate puternic la compresiune), se potdezvolta deformaii specifice de compresiune importante în beton înainte de curgerea armăturii întinse. Înaceste cazuri, curbura de curgere trebuie determinată la atingerea unor deformaii specifice de compresiune
în beton de ε c=0.0015 (Paulay şi Priestley, 1992):
y c ycφ ε ′ = (8.2)
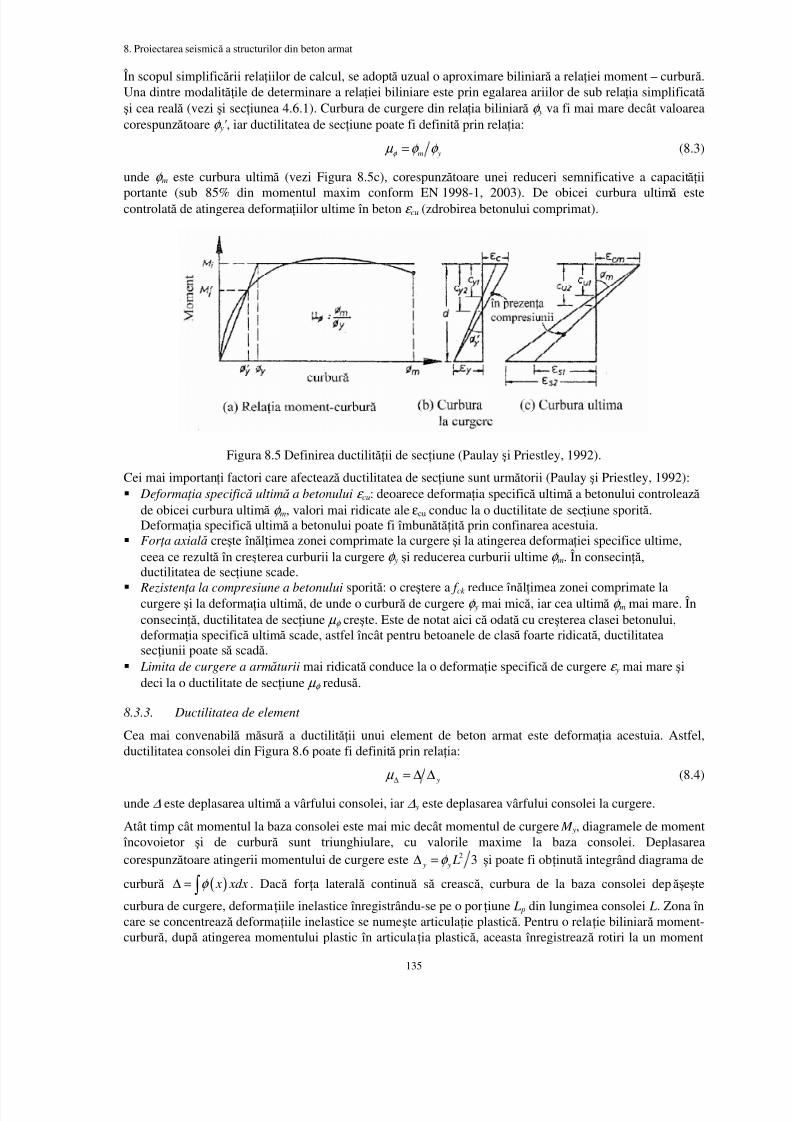
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 136/149
8. Proiectarea seismică a structurilor din beton armat
135
În scopul simplificării relaiilor de calcul, se adoptă uzual o aproximare biliniară a relaiei moment – curbură.Una dintre modalităile de determinare a relaiei biliniare este prin egalarea ariilor de sub relaia simplificată şi cea reală (vezi şi seciunea 4.6.1). Curbura de curgere din relaia biliniară φ y va fi mai mare decât valoareacorespunzătoare φ y' , iar ductilitatea de seciune poate fi definită prin relaia:
m yφ µ φ φ = (8.3)
unde φ m este curbura ultimă (vezi Figura 8.5c), corespunzătoare unei reduceri semnificative a capacităiiportante (sub 85% din momentul maxim conform EN 1998-1, 2003). De obicei curbura ultimă estecontrolată de atingerea deformaiilor ultime în beton ε cu (zdrobirea betonului comprimat).
Figura 8.5 Definirea ductilităii de seciune (Paulay şi Priestley, 1992).
Cei mai importani factori care afectează ductilitatea de seciune sunt următorii (Paulay şi Priestley, 1992): Deforma ia specifică ultimă a betonului ε cu: deoarece deformaia specifică ultimă a betonului controlează
de obicei curbura ultimă φ m, valori mai ridicate ale εcu conduc la o ductilitate de seciune sporită.Deformaia specifică ultimă a betonului poate fi îmbunătăită prin confinarea acestuia.
For a axială creşte înălimea zonei comprimate la curgere şi la atingerea deformaiei specifice ultime,ceea ce rezultă în creşterea curburii la curgere φ y şi reducerea curburii ultime φ m. În consecină,ductilitatea de seciune scade.
Rezisten a la compresiune a betonului sporită: o creştere a f ck reduce înălimea zonei comprimate lacurgere şi la deformaia ultimă, de unde o curbură de curgere φ y mai mică, iar cea ultimă φ m mai mare. Înconsecină, ductilitatea de seciune µ φ creşte. Este de notat aici că odată cu creşterea clasei betonului,deformaia specifică ultimă scade, astfel încât pentru betoanele de clasă foarte ridicată, ductilitateaseciunii poate să scadă.
Limita de curgere a armăturii mai ridicată conduce la o deformaie specifică de curgere ε y mai mare şideci la o ductilitate de seciune µ φ redusă.
8.3.3. Ductilitatea de element
Cea mai convenabilă măsură a ductilităii unui element de beton armat este deformaia acestuia. Astfel,ductilitatea consolei din Figura 8.6 poate fi definită prin relaia:
y µ
∆= ∆ ∆ (8.4)
unde ∆ este deplasarea ultimă a vârfului consolei, iar ∆ y este deplasarea vârfului consolei la curgere.
Atât timp cât momentul la baza consolei este mai mic decât momentul de curgere M y, diagramele de moment încovoietor şi de curbură sunt triunghiulare, cu valorile maxime la baza consolei. Deplasareacorespunzătoare atingerii momentului de curgere este 2 3 y y Lφ ∆ = şi poate fi obinută integrând diagrama de
curbură ( ) x xdxφ ∆ =
∫. Dacă fora laterală continuă să crească, curbura de la baza consolei depăşeşte
curbura de curgere, deformaiile inelastice înregistrându-se pe o poriune L p din lungimea consolei L. Zona încare se concentrează deformaiile inelastice se numeşte articulaie plastică. Pentru o relaie biliniară moment-curbură, după atingerea momentului plastic în articulaia plastică, aceasta înregistrează rotiri la un moment
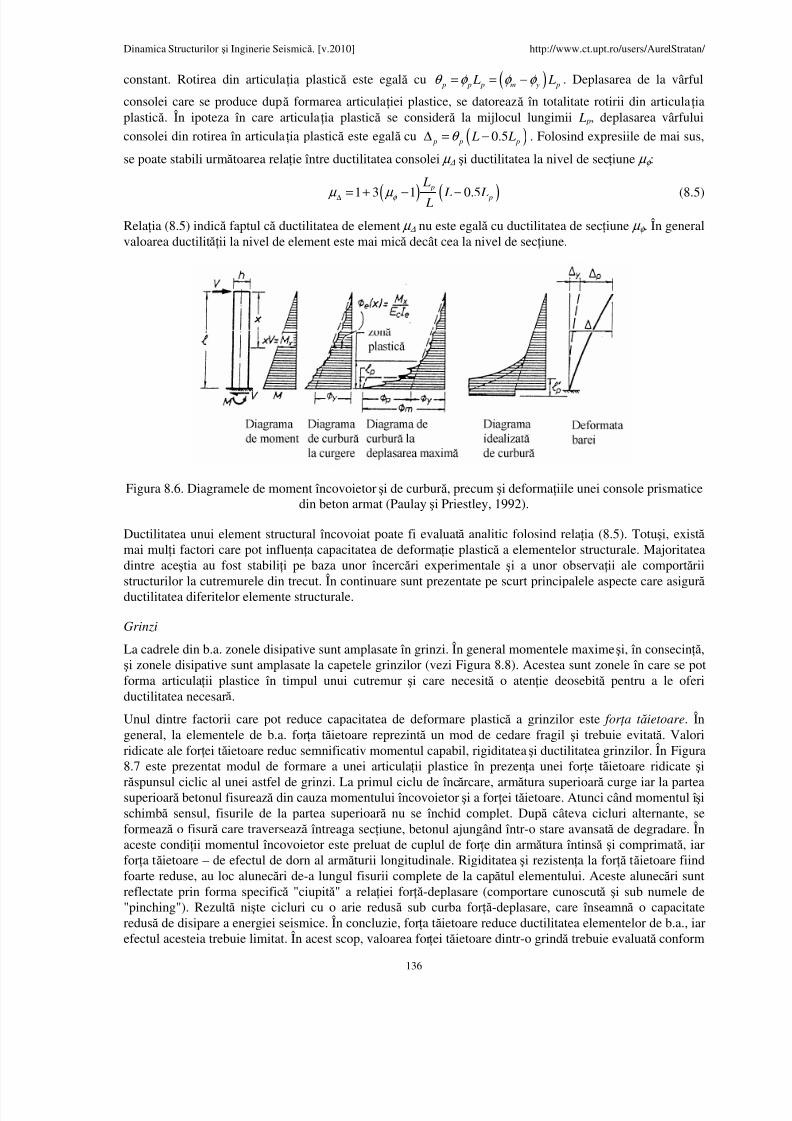
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 137/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
136
constant. Rotirea din articulaia plastică este egală cu ( ) p p p m y p L Lθ φ φ φ = = − . Deplasarea de la vârful
consolei care se produce după formarea articulaiei plastice, se datorează în totalitate rotirii din articulaiaplastică. În ipoteza în care articulaia plastică se consideră la mijlocul lungimii L p, deplasarea vârfului
consolei din rotirea în articulaia plastică este egală cu ( )0.5 p p p L Lθ ∆ = − . Folosind expresiile de mai sus,
se poate stabili următoarea relaie între ductilitatea consolei µ ∆ şi ductilitatea la nivel de seciune µ φ :
( ) ( )1 3 1 0.5 p
p
L L L
Lφ
µ µ ∆
= + − − (8.5)
Relaia (8.5) indică faptul că ductilitatea de element µ ∆ nu este egală cu ductilitatea de seciune µ φ . În generalvaloarea ductilităii la nivel de element este mai mică decât cea la nivel de seciune.
Figura 8.6. Diagramele de moment încovoietor şi de curbură, precum şi deformaiile unei console prismaticedin beton armat (Paulay şi Priestley, 1992).
Ductilitatea unui element structural încovoiat poate fi evaluată analitic folosind relaia (8.5). Totuşi, există mai muli factori care pot influena capacitatea de deformaie plastică a elementelor structurale. Majoritateadintre aceştia au fost stabilii pe baza unor încercări experimentale şi a unor observaii ale comportăriistructurilor la cutremurele din trecut. În continuare sunt prezentate pe scurt principalele aspecte care asigur ă ductilitatea diferitelor elemente structurale.
Grinzi
La cadrele din b.a. zonele disipative sunt amplasate în grinzi. În general momentele maxime şi, în consecină,şi zonele disipative sunt amplasate la capetele grinzilor (vezi Figura 8.8). Acestea sunt zonele în care se potforma articulaii plastice în timpul unui cutremur şi care necesită o atenie deosebită pentru a le oferiductilitatea necesară.
Unul dintre factorii care pot reduce capacitatea de deformare plastică a grinzilor este for a t ăietoare. Îngeneral, la elementele de b.a. fora tăietoare reprezintă un mod de cedare fragil şi trebuie evitată. Valoriridicate ale forei tăietoare reduc semnificativ momentul capabil, rigiditatea şi ductilitatea grinzilor. În Figura8.7 este prezentat modul de formare a unei articulaii plastice în prezena unei fore tăietoare ridicate şirăspunsul ciclic al unei astfel de grinzi. La primul ciclu de încărcare, armătura superioară curge iar la parteasuperioară betonul fisurează din cauza momentului încovoietor şi a forei tăietoare. Atunci când momentul î şischimbă sensul, fisurile de la partea superioară nu se închid complet. După câteva cicluri alternante, seformează o fisură care traversează întreaga seciune, betonul ajungând într-o stare avansată de degradare. Înaceste condiii momentul încovoietor este preluat de cuplul de fore din armătura întinsă şi comprimată, iarfora tăietoare – de efectul de dorn al armăturii longitudinale. Rigiditatea şi rezistena la foră tăietoare fiindfoarte reduse, au loc alunecări de-a lungul fisurii complete de la capătul elementului. Aceste alunecări sunt
reflectate prin forma specifică "ciupită" a relaiei foră-deplasare (comportare cunoscută şi sub numele de"pinching"). Rezultă nişte cicluri cu o arie redusă sub curba foră-deplasare, care înseamnă o capacitateredusă de disipare a energiei seismice. În concluzie, fora tăietoare reduce ductilitatea elementelor de b.a., iarefectul acesteia trebuie limitat. În acest scop, valoarea forei tăietoare dintr-o grindă trebuie evaluată conform
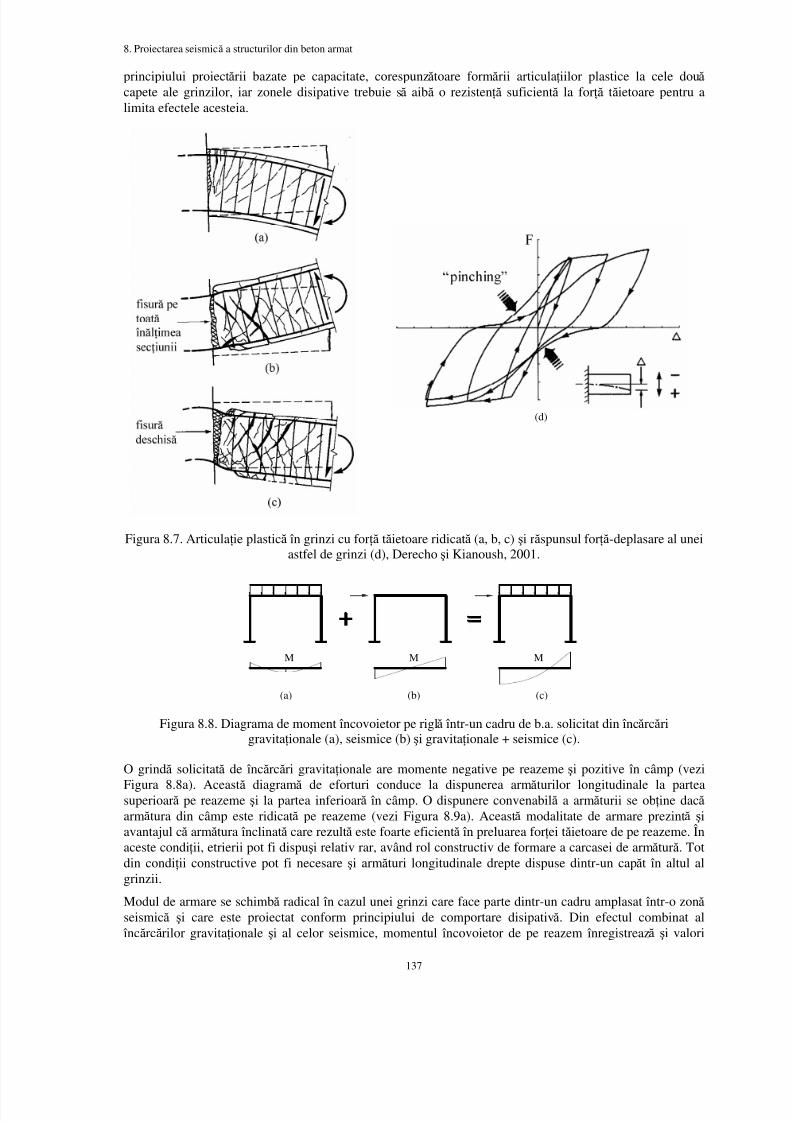
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 138/149
8. Proiectarea seismică a structurilor din beton armat
137
principiului proiectării bazate pe capacitate, corespunzătoare formării articulaiilor plastice la cele două capete ale grinzilor, iar zonele disipative trebuie să aibă o rezistenă suficientă la foră tăietoare pentru alimita efectele acesteia.
(d)
Figura 8.7. Articulaie plastică în grinzi cu foră tăietoare ridicată (a, b, c) şi răspunsul foră-deplasare al uneiastfel de grinzi (d), Derecho şi Kianoush, 2001.
M M M
(a) (b) (c)
Figura 8.8. Diagrama de moment încovoietor pe riglă într-un cadru de b.a. solicitat din încărcărigravitaionale (a), seismice (b) şi gravitaionale + seismice (c).
O grindă solicitată de încărcări gravitaionale are momente negative pe reazeme şi pozitive în câmp (veziFigura 8.8a). Această diagramă de eforturi conduce la dispunerea armăturilor longitudinale la parteasuperioară pe reazeme şi la partea inferioară în câmp. O dispunere convenabilă a armăturii se obine dacă armătura din câmp este ridicată pe reazeme (vezi Figura 8.9a). Această modalitate de armare prezintă şiavantajul că armătura înclinată care rezultă este foarte eficientă în preluarea forei tăietoare de pe reazeme. Înaceste condiii, etrierii pot fi dispuşi relativ rar, având rol constructiv de formare a carcasei de armătură. Totdin condiii constructive pot fi necesare şi armături longitudinale drepte dispuse dintr-un capăt în altul algrinzii.
Modul de armare se schimbă radical în cazul unei grinzi care face parte dintr-un cadru amplasat într-o zonă seismică şi care este proiectat conform principiului de comportare disipativă. Din efectul combinat al
încărcărilor gravitaionale şi al celor seismice, momentul încovoietor de pe reazem înregistrează şi valori
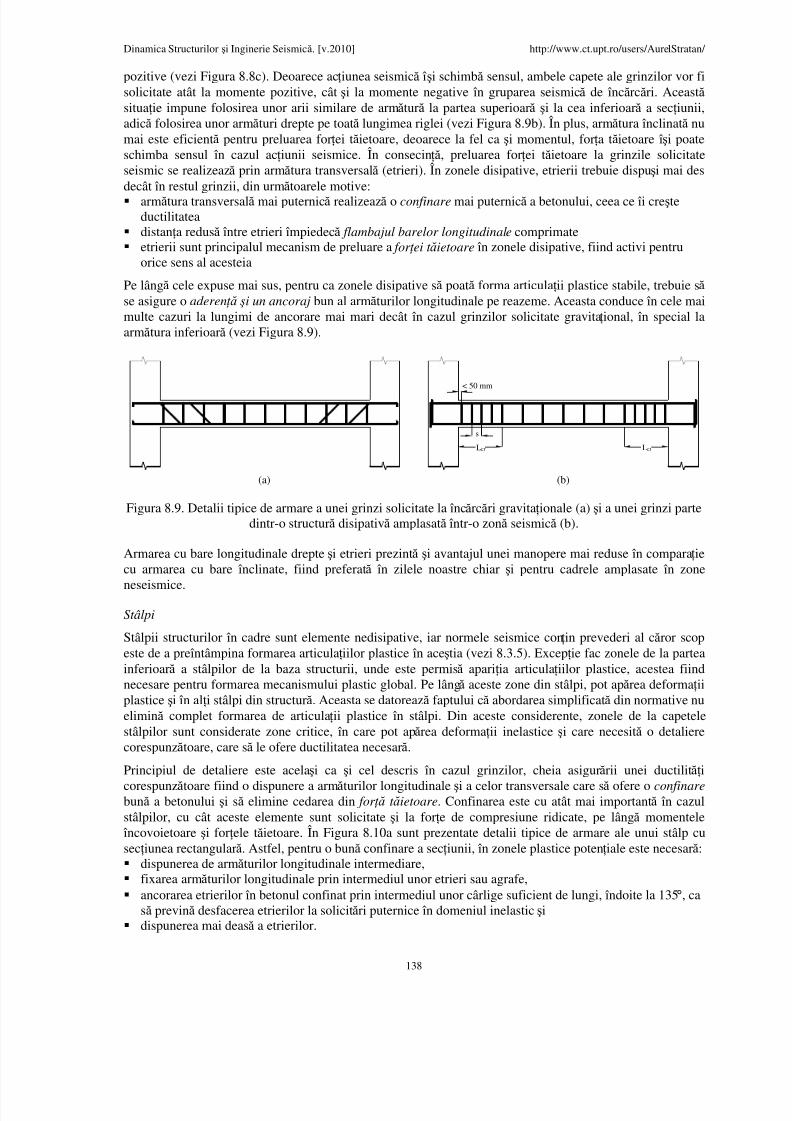
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 139/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
138
pozitive (vezi Figura 8.8c). Deoarece aciunea seismică î şi schimbă sensul, ambele capete ale grinzilor vor fisolicitate atât la momente pozitive, cât şi la momente negative în gruparea seismică de încărcări. Această situaie impune folosirea unor arii similare de armătură la partea superioară şi la cea inferioară a seciunii,adică folosirea unor armături drepte pe toată lungimea riglei (vezi Figura 8.9b). În plus, armătura înclinată numai este eficientă pentru preluarea forei tăietoare, deoarece la fel ca şi momentul, fora tăietoare î şi poateschimba sensul în cazul aciunii seismice. În consecină, preluarea forei tăietoare la grinzile solicitateseismic se realizează prin armătura transversală (etrieri). În zonele disipative, etrierii trebuie dispuşi mai desdecât în restul grinzii, din următoarele motive: armătura transversală mai puternică realizează o confinare mai puternică a betonului, ceea ce îi creşte
ductilitatea distana redusă între etrieri împiedecă flambajul barelor longitudinale comprimate etrierii sunt principalul mecanism de preluare a for ei t ăietoare în zonele disipative, fiind activi pentru
orice sens al acesteia
Pe lângă cele expuse mai sus, pentru ca zonele disipative să poată forma articulaii plastice stabile, trebuie să se asigure o aderen ă şi un ancoraj bun al armăturilor longitudinale pe reazeme. Aceasta conduce în cele maimulte cazuri la lungimi de ancorare mai mari decât în cazul grinzilor solicitate gravitaional, în special laarmătura inferioară (vezi Figura 8.9).
< 50 mm
s
Lcr Lcr
(a) (b)
Figura 8.9. Detalii tipice de armare a unei grinzi solicitate la încărcări gravitaionale (a) şi a unei grinzi partedintr-o structură disipativă amplasată într-o zonă seismică (b).
Armarea cu bare longitudinale drepte şi etrieri prezintă şi avantajul unei manopere mai reduse în comparaiecu armarea cu bare înclinate, fiind preferată în zilele noastre chiar şi pentru cadrele amplasate în zoneneseismice.
Stâlpi
Stâlpii structurilor în cadre sunt elemente nedisipative, iar normele seismice conin prevederi al căror scopeste de a preîntâmpina formarea articulaiilor plastice în aceştia (vezi 8.3.5). Excepie fac zonele de la parteainferioară a stâlpilor de la baza structurii, unde este permisă apariia articulaiilor plastice, acestea fiindnecesare pentru formarea mecanismului plastic global. Pe lângă aceste zone din stâlpi, pot apărea deformaiiplastice şi în ali stâlpi din structură. Aceasta se datorează faptului că abordarea simplificată din normative nu
elimină complet formarea de articulaii plastice în stâlpi. Din aceste considerente, zonele de la capetelestâlpilor sunt considerate zone critice, în care pot apărea deformaii inelastice şi care necesită o detalierecorespunzătoare, care să le ofere ductilitatea necesară.
Principiul de detaliere este acelaşi ca şi cel descris în cazul grinzilor, cheia asigurării unei ductilităicorespunzătoare fiind o dispunere a armăturilor longitudinale şi a celor transversale care să ofere o confinare
bună a betonului şi să elimine cedarea din for ă t ăietoare. Confinarea este cu atât mai importantă în cazulstâlpilor, cu cât aceste elemente sunt solicitate şi la fore de compresiune ridicate, pe lângă momentele
încovoietoare şi forele tăietoare. În Figura 8.10a sunt prezentate detalii tipice de armare ale unui stâlp cuseciunea rectangulară. Astfel, pentru o bună confinare a seciunii, în zonele plastice poteniale este necesară: dispunerea de armăturilor longitudinale intermediare, fixarea armăturilor longitudinale prin intermediul unor etrieri sau agrafe, ancorarea etrierilor în betonul confinat prin intermediul unor cârlige suficient de lungi, îndoite la 135°, ca
să prevină desfacerea etrierilor la solicitări puternice în domeniul inelastic şi dispunerea mai deasă a etrierilor.
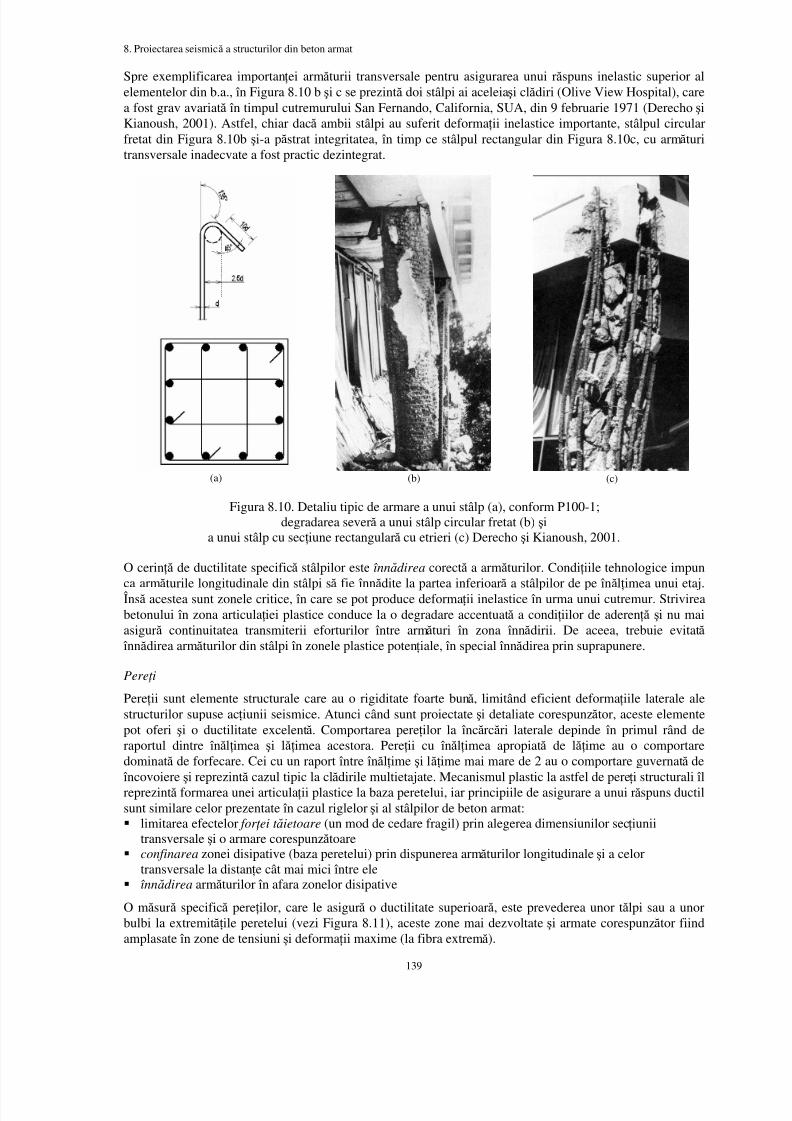
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 140/149
8. Proiectarea seismică a structurilor din beton armat
139
Spre exemplificarea importanei armăturii transversale pentru asigurarea unui răspuns inelastic superior alelementelor din b.a., în Figura 8.10 b şi c se prezintă doi stâlpi ai aceleiaşi clădiri (Olive View Hospital), carea fost grav avariată în timpul cutremurului San Fernando, California, SUA, din 9 februarie 1971 (Derecho şiKianoush, 2001). Astfel, chiar dacă ambii stâlpi au suferit deformaii inelastice importante, stâlpul circularfretat din Figura 8.10b şi-a păstrat integritatea, în timp ce stâlpul rectangular din Figura 8.10c, cu armăturitransversale inadecvate a fost practic dezintegrat.
(a) (b) (c)
Figura 8.10. Detaliu tipic de armare a unui stâlp (a), conform P100-1;degradarea severă a unui stâlp circular fretat (b) şi
a unui stâlp cu seciune rectangulară cu etrieri (c) Derecho şi Kianoush, 2001.
O cerină de ductilitate specifică stâlpilor este înnădirea corectă a armăturilor. Condiiile tehnologice impunca armăturile longitudinale din stâlpi să fie înnădite la partea inferioară a stâlpilor de pe înălimea unui etaj.Însă acestea sunt zonele critice, în care se pot produce deformaii inelastice în urma unui cutremur. Strivireabetonului în zona articulaiei plastice conduce la o degradare accentuată a condiiilor de aderenă şi nu maiasigură continuitatea transmiterii eforturilor între armături în zona înnădirii. De aceea, trebuie evitată
înnădirea armăturilor din stâlpi în zonele plastice poteniale, în special înnădirea prin suprapunere.
Pere i
Pereii sunt elemente structurale care au o rigiditate foarte bună, limitând eficient deformaiile laterale ale
structurilor supuse aciunii seismice. Atunci când sunt proiectate şi detaliate corespunzător, aceste elementepot oferi şi o ductilitate excelentă. Comportarea pereilor la încărcări laterale depinde în primul rând deraportul dintre înălimea şi lăimea acestora. Pereii cu înălimea apropiată de lăime au o comportaredominată de forfecare. Cei cu un raport între înălime şi lăime mai mare de 2 au o comportare guvernată de
încovoiere şi reprezintă cazul tipic la clădirile multietajate. Mecanismul plastic la astfel de perei structurali îlreprezintă formarea unei articulaii plastice la baza peretelui, iar principiile de asigurare a unui răspuns ductilsunt similare celor prezentate în cazul riglelor şi al stâlpilor de beton armat: limitarea efectelor for ei t ăietoare (un mod de cedare fragil) prin alegerea dimensiunilor seciunii
transversale şi o armare corespunzătoare confinarea zonei disipative (baza peretelui) prin dispunerea armăturilor longitudinale şi a celor
transversale la distane cât mai mici între ele înnădirea armăturilor în afara zonelor disipative
O măsură specifică pereilor, care le asigură o ductilitate superioară, este prevederea unor tălpi sau a unorbulbi la extremităile peretelui (vezi Figura 8.11), aceste zone mai dezvoltate şi armate corespunzător fiindamplasate în zone de tensiuni şi deformaii maxime (la fibra extremă).
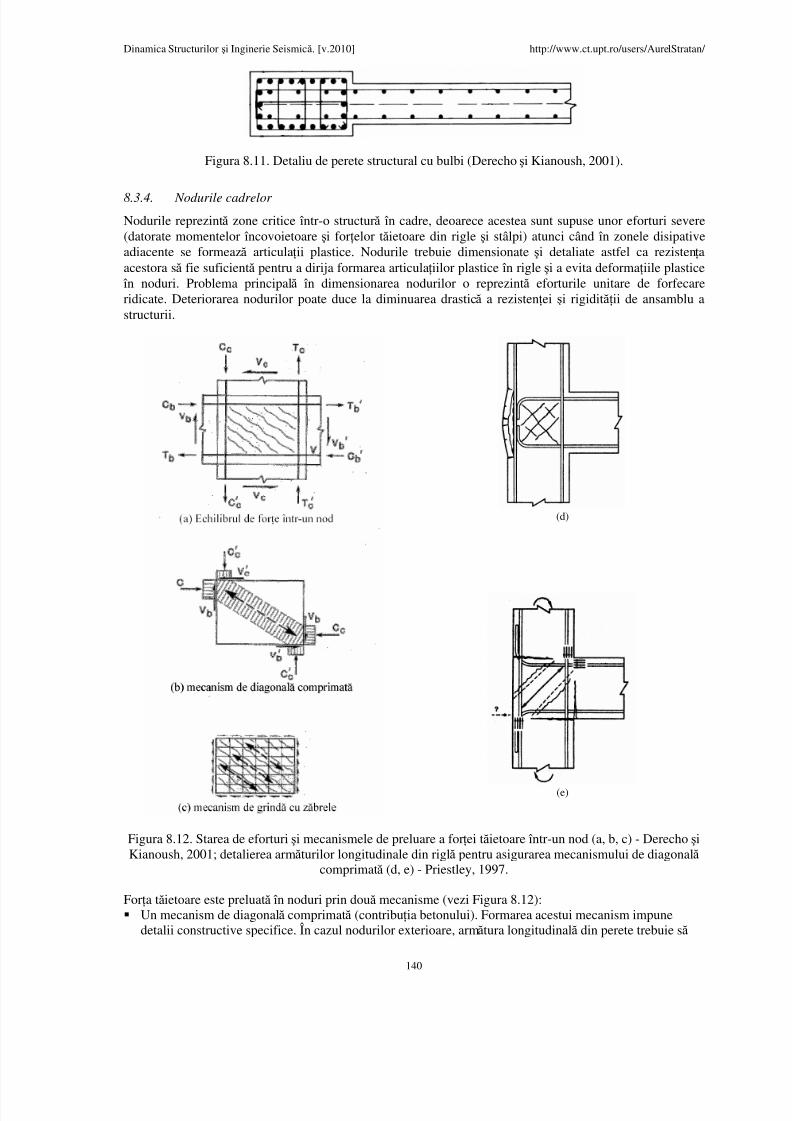
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 141/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
140
Figura 8.11. Detaliu de perete structural cu bulbi (Derecho şi Kianoush, 2001).
8.3.4. Nodurile cadrelor
Nodurile reprezintă zone critice într-o structură în cadre, deoarece acestea sunt supuse unor eforturi severe(datorate momentelor încovoietoare şi forelor tăietoare din rigle şi stâlpi) atunci când în zonele disipativeadiacente se formează articulaii plastice. Nodurile trebuie dimensionate şi detaliate astfel ca rezistenaacestora să fie suficientă pentru a dirija formarea articulaiilor plastice în rigle şi a evita deformaiile plastice
în noduri. Problema principală în dimensionarea nodurilor o reprezintă eforturile unitare de forfecareridicate. Deteriorarea nodurilor poate duce la diminuarea drastică a rezistenei şi rigidităii de ansamblu astructurii.
(d)
(e)
Figura 8.12. Starea de eforturi şi mecanismele de preluare a forei tăietoare într-un nod (a, b, c) - Derecho şiKianoush, 2001; detalierea armăturilor longitudinale din riglă pentru asigurarea mecanismului de diagonală
comprimată (d, e) - Priestley, 1997.
Fora tăietoare este preluată în noduri prin două mecanisme (vezi Figura 8.12): Un mecanism de diagonală comprimată (contribuia betonului). Formarea acestui mecanism impune
detalii constructive specifice. În cazul nodurilor exterioare, armătura longitudinală din perete trebuie să
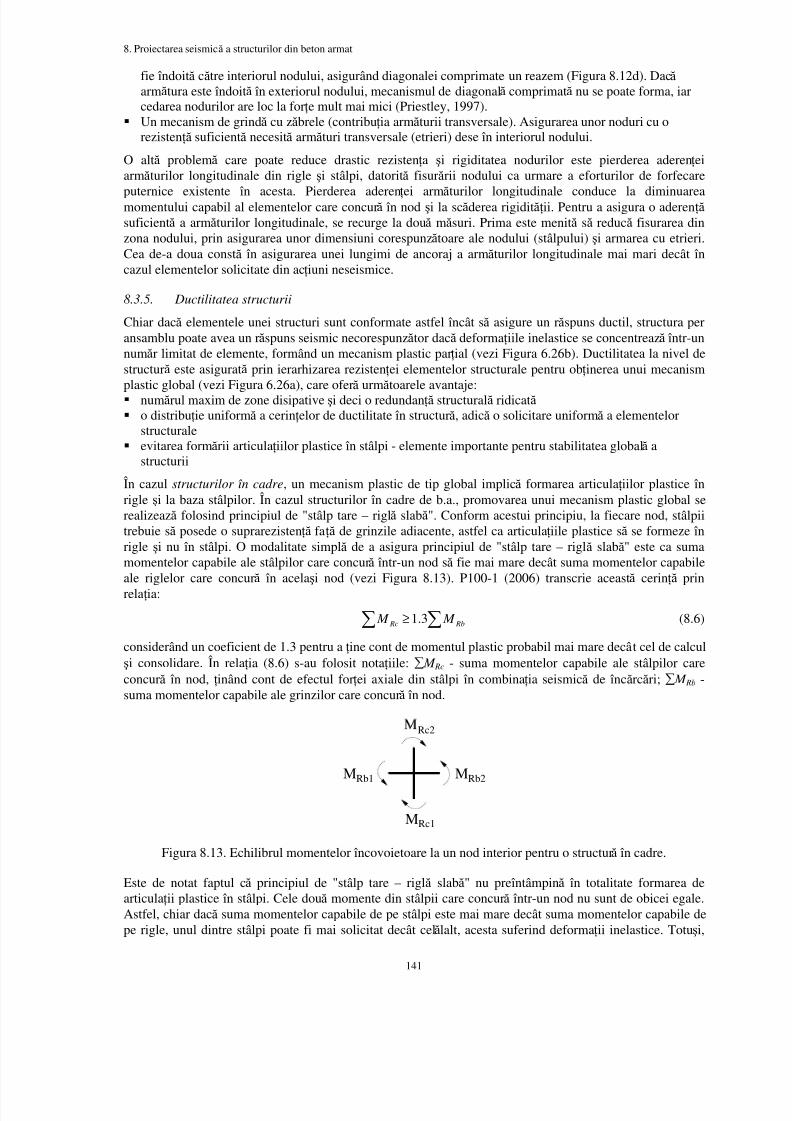
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 142/149
8. Proiectarea seismică a structurilor din beton armat
141
fie îndoită către interiorul nodului, asigurând diagonalei comprimate un reazem (Figura 8.12d). Dacă armătura este îndoită în exteriorul nodului, mecanismul de diagonală comprimată nu se poate forma, iarcedarea nodurilor are loc la fore mult mai mici (Priestley, 1997).
Un mecanism de grindă cu zăbrele (contribuia armăturii transversale). Asigurarea unor noduri cu orezistenă suficientă necesită armături transversale (etrieri) dese în interiorul nodului.
O altă problemă care poate reduce drastic rezistena şi rigiditatea nodurilor este pierderea aderenei
armăturilor longitudinale din rigle şi stâlpi, datorită fisurării nodului ca urmare a eforturilor de forfecareputernice existente în acesta. Pierderea aderenei armăturilor longitudinale conduce la diminuareamomentului capabil al elementelor care concură în nod şi la scăderea rigidităii. Pentru a asigura o aderenă suficientă a armăturilor longitudinale, se recurge la două măsuri. Prima este menită să reducă fisurarea dinzona nodului, prin asigurarea unor dimensiuni corespunzătoare ale nodului (stâlpului) şi armarea cu etrieri.Cea de-a doua constă în asigurarea unei lungimi de ancoraj a armăturilor longitudinale mai mari decât încazul elementelor solicitate din aciuni neseismice.
8.3.5. Ductilitatea structurii
Chiar dacă elementele unei structuri sunt conformate astfel încât să asigure un răspuns ductil, structura peransamblu poate avea un răspuns seismic necorespunzător dacă deformaiile inelastice se concentrează într-un
număr limitat de elemente, formând un mecanism plastic parial (vezi Figura 6.26b). Ductilitatea la nivel destructură este asigurată prin ierarhizarea rezistenei elementelor structurale pentru obinerea unui mecanismplastic global (vezi Figura 6.26a), care oferă următoarele avantaje: numărul maxim de zone disipative şi deci o redundană structurală ridicată o distribuie uniformă a cerinelor de ductilitate în structură, adică o solicitare uniformă a elementelor
structurale evitarea formării articulaiilor plastice în stâlpi - elemente importante pentru stabilitatea globală a
structurii
În cazul structurilor în cadre, un mecanism plastic de tip global implică formarea articulaiilor plastice înrigle şi la baza stâlpilor. În cazul structurilor în cadre de b.a., promovarea unui mecanism plastic global serealizează folosind principiul de "stâlp tare – riglă slabă". Conform acestui principiu, la fiecare nod, stâlpii
trebuie să posede o suprarezistenă faă de grinzile adiacente, astfel ca articulaiile plastice să se formeze înrigle şi nu în stâlpi. O modalitate simplă de a asigura principiul de "stâlp tare – riglă slabă" este ca sumamomentelor capabile ale stâlpilor care concură într-un nod să fie mai mare decât suma momentelor capabileale riglelor care concură în acelaşi nod (vezi Figura 8.13). P100-1 (2006) transcrie această cerină prinrelaia:
1.3 Rc Rb M M ≥∑ ∑ (8.6)
considerând un coeficient de 1.3 pentru a ine cont de momentul plastic probabil mai mare decât cel de calculşi consolidare. În relaia (8.6) s-au folosit notaiile: ∑ M Rc - suma momentelor capabile ale stâlpilor careconcură în nod, inând cont de efectul forei axiale din stâlpi în combinaia seismică de încărcări; ∑ M Rb -suma momentelor capabile ale grinzilor care concură în nod.
MRb2MRb1
MRc1
Rc2
Figura 8.13. Echilibrul momentelor încovoietoare la un nod interior pentru o structură în cadre.
Este de notat faptul că principiul de "stâlp tare – riglă slabă" nu preîntâmpină în totalitate formarea dearticulaii plastice în stâlpi. Cele două momente din stâlpii care concură într-un nod nu sunt de obicei egale.Astfel, chiar dacă suma momentelor capabile de pe stâlpi este mai mare decât suma momentelor capabile depe rigle, unul dintre stâlpi poate fi mai solicitat decât celălalt, acesta suferind deformaii inelastice. Totuşi,
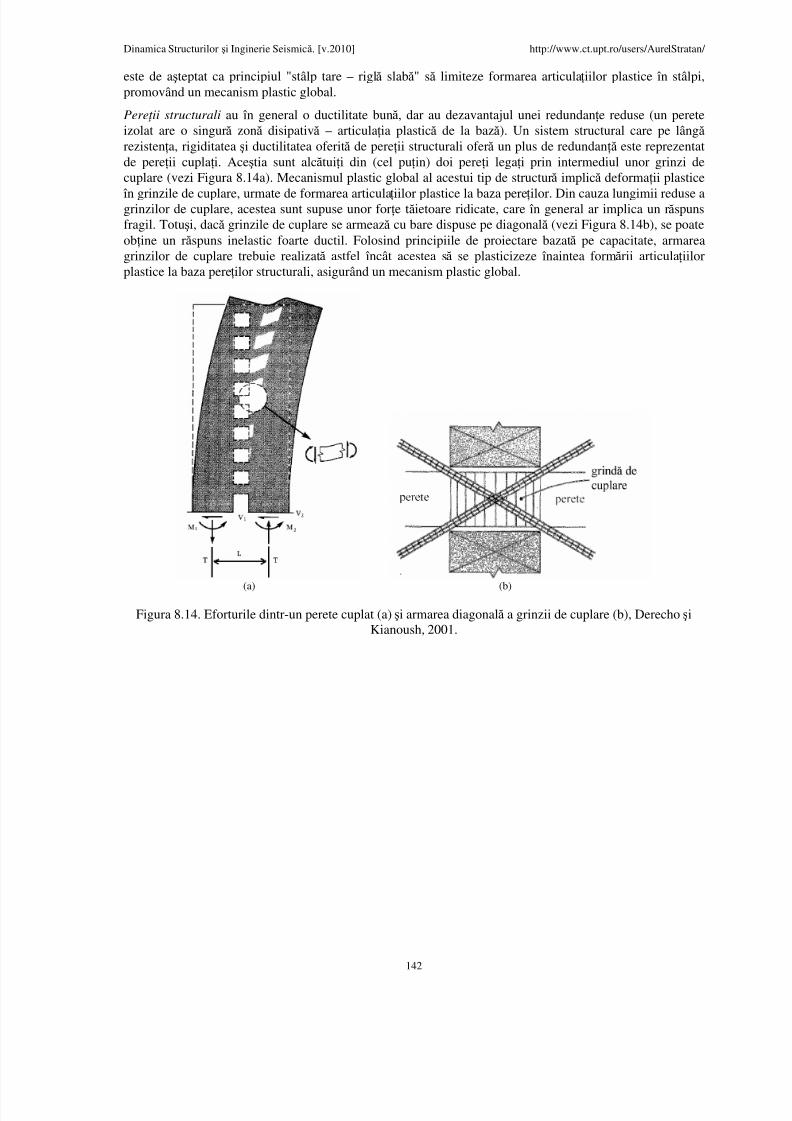
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 143/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
142
este de aşteptat ca principiul "stâlp tare – riglă slabă" să limiteze formarea articulaiilor plastice în stâlpi,promovând un mecanism plastic global.
Pere ii structurali au în general o ductilitate bună, dar au dezavantajul unei redundane reduse (un pereteizolat are o singură zonă disipativă – articulaia plastică de la bază). Un sistem structural care pe lângă rezistena, rigiditatea şi ductilitatea oferită de pereii structurali oferă un plus de redundană este reprezentatde pereii cuplai. Aceştia sunt alcătuii din (cel puin) doi perei legai prin intermediul unor grinzi de
cuplare (vezi Figura 8.14a). Mecanismul plastic global al acestui tip de structură implică deformaii plastice în grinzile de cuplare, urmate de formarea articulaiilor plastice la baza pereilor. Din cauza lungimii reduse agrinzilor de cuplare, acestea sunt supuse unor fore tăietoare ridicate, care în general ar implica un răspunsfragil. Totuşi, dacă grinzile de cuplare se armează cu bare dispuse pe diagonală (vezi Figura 8.14b), se poateobine un răspuns inelastic foarte ductil. Folosind principiile de proiectare bazată pe capacitate, armareagrinzilor de cuplare trebuie realizată astfel încât acestea să se plasticizeze înaintea formării articulaiilorplastice la baza pereilor structurali, asigurând un mecanism plastic global.
(a) (b)
Figura 8.14. Eforturile dintr-un perete cuplat (a) şi armarea diagonală a grinzii de cuplare (b), Derecho şiKianoush, 2001.

5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 144/149
9. Proiectarea seismică a podurilor
143
9. Proiectarea seismică a podurilor
9.1. Cerine fundamentale şi principii de proiectare
Podurile sunt structuri inginereşti destinate traversării unor obstacole de către o cale de comunicaie terestră.Din punct de vedere structural, un pod se compune din suprastructură şi infrastructură (vezi Figura 9.1).Suprastructura (tablierul) este partea superioară a podului care preia încărcările din trafic. Infrastructuraserveşte la transmiterea eforturilor de la suprastructură către teren şi este alcătuită din pile (reazemeintermediare) şi culee (reazeme de capăt). Legătura dintre infrastructură şi suprastructură poate fi de tip
încastrat, articulat, sau simplu rezemat. Deseori sunt necesare reazeme simple şi rosturi de dilataie pentru alimita eforturile provenite din variaii de temperatură.
pila culee
Figura 9.1. Elementele principale ale structurii unui pod.
Importana prevenirii colapsului podurilor în urma unor cutremure de pământ are la bază câteva motive.Primul dintre acestea este acelaşi cu cerina impusă clădirilor în general: prevenirea pierderilor de vieiomeneşti. Cel de-al doilea constă în faptul că, în foarte multe cazuri, podurile reprezintă legături vitale înreeaua de transport. În lipsa unor căi de comunicaie alternative, distrugerea unui pod poate întrerupetraficul, f ăcând imposibile activităile echipelor de intervenie în situaii de urgenă. În cele din urmă,
întreruperea traficului pe un termen mai lung după un cutremur poate avea efecte economice nefavorabile
asupra regiunii afectate de cutremur.
EN 1998-2, 2003, norma seismică europeană care reglementează aspectele specifice proiectării seismice apodurilor, conine două cerine fundamentale (sau obiective de performană). Prima cerină corespunde stăriilimită ultime (SLU) şi prevede evitarea colapsului sub efectul aciunii seismice de proiectare, în urma căreiapodul trebuie să-şi menină integritatea structurală şi o capacitate portantă reziduală, chiar dacă unele păriale sale pot suferi avarii importante. Structura podului trebuie să fie tolerantă la avariere, în sensul în care, înurma aciunii seismice de proiectare, podul să poată susine traficul de urgenă şi să permită o inspectare şireparaie facilă a zonelor avariate.
Ce-a de-a doua cerină fundamentală corespunde stării limită de serviciu (SLS) şi constă în limitareadegradărilor sub efectul unei aciuni seismice cu o probabilitate mai mare de apariie decât aciunea seismică
de proiectare. Conform cerinelor EN 1998-2 (2003), sunt permise doar degradări minore ale elementelorsecundare şi ale zonelor disipative în urma unui cutremur corespunzător SLS şi nu trebuie să fie necesară întreruperea traficului sau efectuarea unor reparaii.
Ca şi în cazul structurilor pentru clădiri, podurile pot fi proiectate conform principiilor de comportaredisipativă sau comportare slab-disipativă. Podurile slab-disipative sunt cele care au o ductilitate limitat ă (termen folosit de EN 1998-2, 2003). În acest caz nu se asigură prin proiectare cerine speciale care să asigure structurii o ductilitate superioară, iar încărcarea seismică se determină pe baza unor factori decomportare q ≤ 1.5. În cazul podurilor al căror răspuns este dominat de modurile superioare de vibraie (deexemplu podurile suspendate), sau atunci când structura are un răspuns fragil (datorită unor fore axiale sautăietoare mari), este recomandată asigurarea unui răspuns elastic al structurii sub efectul aciunii seismice decalcul, prin utilizarea un factor de comportare q=1.
Podurile disipative (sau ductile în terminologia EN 1998-2, 2003) sunt proiectate astfel încât să aibă unrăspuns ductil sub efectul aciunii seismice de proiectare, disipând energia seismică prin incursiuni în
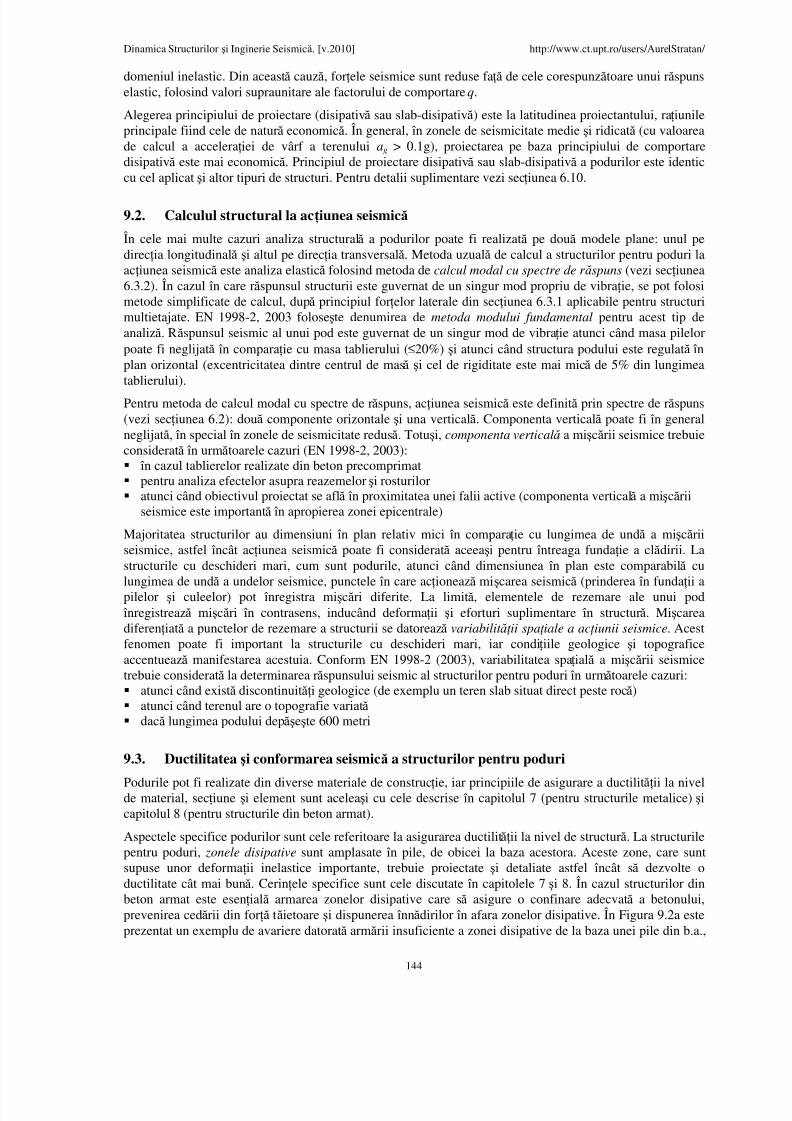
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 145/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
144
domeniul inelastic. Din această cauză, forele seismice sunt reduse faă de cele corespunzătoare unui răspunselastic, folosind valori supraunitare ale factorului de comportare q.
Alegerea principiului de proiectare (disipativă sau slab-disipativă) este la latitudinea proiectantului, raiunileprincipale fiind cele de natură economică. În general, în zonele de seismicitate medie şi ridicată (cu valoareade calcul a acceleraiei de vârf a terenului ag > 0.1g), proiectarea pe baza principiului de comportaredisipativă este mai economică. Principiul de proiectare disipativă sau slab-disipativă a podurilor este identic
cu cel aplicat şi altor tipuri de structuri. Pentru detalii suplimentare vezi seciunea 6.10.
9.2. Calculul structural la aciunea seismică
În cele mai multe cazuri analiza structurală a podurilor poate fi realizată pe două modele plane: unul pedirecia longitudinală şi altul pe direcia transversală. Metoda uzuală de calcul a structurilor pentru poduri laaciunea seismică este analiza elastică folosind metoda de calcul modal cu spectre de r ăspuns (vezi seciunea6.3.2). În cazul în care răspunsul structurii este guvernat de un singur mod propriu de vibraie, se pot folosimetode simplificate de calcul, după principiul forelor laterale din seciunea 6.3.1 aplicabile pentru structurimultietajate. EN 1998-2, 2003 foloseşte denumirea de metoda modului fundamental pentru acest tip deanaliză. Răspunsul seismic al unui pod este guvernat de un singur mod de vibraie atunci când masa pilelorpoate fi neglijată în comparaie cu masa tablierului (≤20%) şi atunci când structura podului este regulată înplan orizontal (excentricitatea dintre centrul de masă şi cel de rigiditate este mai mică de 5% din lungimeatablierului).
Pentru metoda de calcul modal cu spectre de răspuns, aciunea seismică este definită prin spectre de răspuns(vezi seciunea 6.2): două componente orizontale şi una verticală. Componenta verticală poate fi în generalneglijată, în special în zonele de seismicitate redusă. Totuşi, componenta verticală a mişcării seismice trebuieconsiderată în următoarele cazuri (EN 1998-2, 2003): în cazul tablierelor realizate din beton precomprimat pentru analiza efectelor asupra reazemelor şi rosturilor atunci când obiectivul proiectat se află în proximitatea unei falii active (componenta verticală a mişcării
seismice este importantă în apropierea zonei epicentrale)
Majoritatea structurilor au dimensiuni în plan relativ mici în comparaie cu lungimea de undă a mişcăriiseismice, astfel încât aciunea seismică poate fi considerată aceeaşi pentru întreaga fundaie a clădirii. Lastructurile cu deschideri mari, cum sunt podurile, atunci când dimensiunea în plan este comparabilă culungimea de undă a undelor seismice, punctele în care acionează mişcarea seismică (prinderea în fundaii apilelor şi culeelor) pot înregistra mişcări diferite. La limită, elementele de rezemare ale unui pod
înregistrează mişcări în contrasens, inducând deformaii şi eforturi suplimentare în structură. Mişcareadifereniată a punctelor de rezemare a structurii se datorează variabilit ă ii spa iale a ac iunii seismice. Acestfenomen poate fi important la structurile cu deschideri mari, iar condiiile geologice şi topograficeaccentuează manifestarea acestuia. Conform EN 1998-2 (2003), variabilitatea spaială a mişcării seismicetrebuie considerată la determinarea răspunsului seismic al structurilor pentru poduri în următoarele cazuri: atunci când există discontinuităi geologice (de exemplu un teren slab situat direct peste rocă) atunci când terenul are o topografie variată dacă lungimea podului depăşeşte 600 metri
9.3. Ductilitatea şi conformarea seismică a structurilor pentru poduri
Podurile pot fi realizate din diverse materiale de construcie, iar principiile de asigurare a ductilităii la nivelde material, seciune şi element sunt aceleaşi cu cele descrise în capitolul 7 (pentru structurile metalice) şicapitolul 8 (pentru structurile din beton armat).
Aspectele specifice podurilor sunt cele referitoare la asigurarea ductilităii la nivel de structură. La structurilepentru poduri, zonele disipative sunt amplasate în pile, de obicei la baza acestora. Aceste zone, care suntsupuse unor deformaii inelastice importante, trebuie proiectate şi detaliate astfel încât să dezvolte oductilitate cât mai bună. Cerinele specifice sunt cele discutate în capitolele 7 şi 8. În cazul structurilor dinbeton armat este esenială armarea zonelor disipative care să asigure o confinare adecvată a betonului,prevenirea cedării din foră tăietoare şi dispunerea înnădirilor în afara zonelor disipative. În Figura 9.2a esteprezentat un exemplu de avariere datorată armării insuficiente a zonei disipative de la baza unei pile din b.a.,
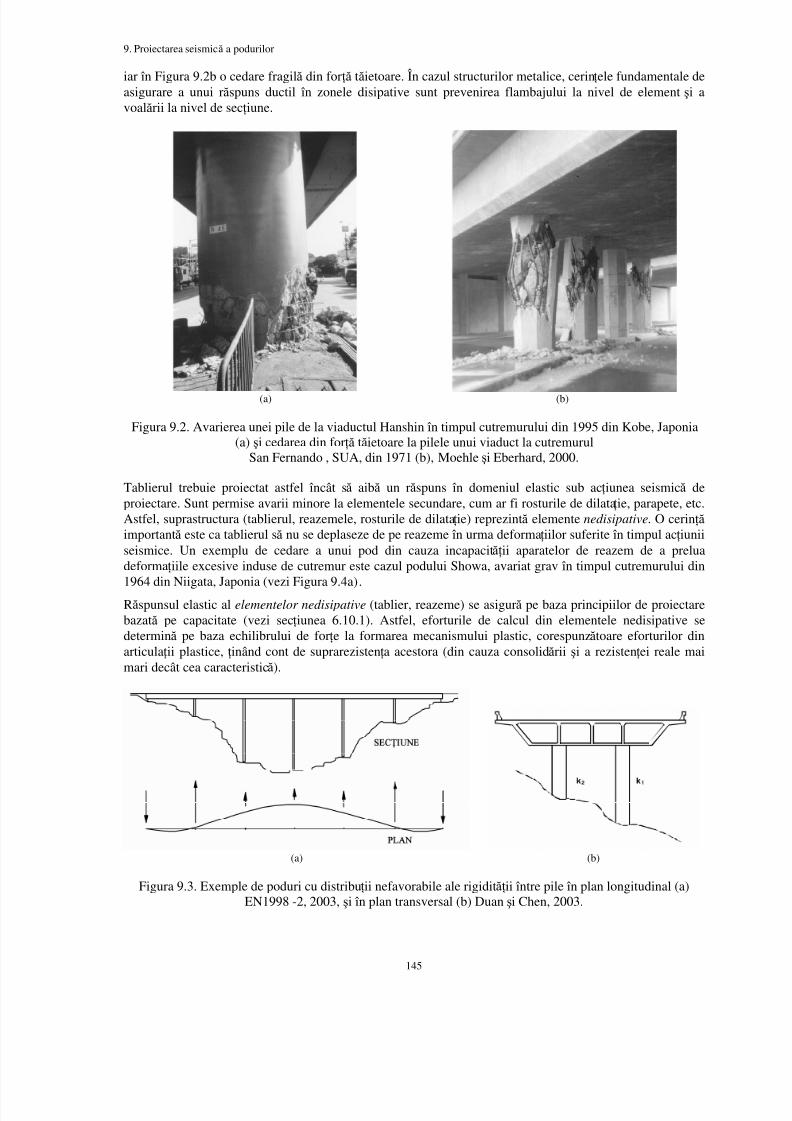
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 146/149
9. Proiectarea seismică a podurilor
145
iar în Figura 9.2b o cedare fragilă din foră tăietoare. În cazul structurilor metalice, cerinele fundamentale deasigurare a unui răspuns ductil în zonele disipative sunt prevenirea flambajului la nivel de element şi avoalării la nivel de seciune.
(a) (b)
Figura 9.2. Avarierea unei pile de la viaductul Hanshin în timpul cutremurului din 1995 din Kobe, Japonia(a) şi cedarea din foră tăietoare la pilele unui viaduct la cutremurul
San Fernando , SUA, din 1971 (b), Moehle şi Eberhard, 2000.
Tablierul trebuie proiectat astfel încât să aibă un răspuns în domeniul elastic sub aciunea seismică deproiectare. Sunt permise avarii minore la elementele secundare, cum ar fi rosturile de dilataie, parapete, etc.Astfel, suprastructura (tablierul, reazemele, rosturile de dilataie) reprezintă elemente nedisipative. O cerină
importantă este ca tablierul să nu se deplaseze de pe reazeme în urma deformaiilor suferite în timpul aciuniiseismice. Un exemplu de cedare a unui pod din cauza incapacităii aparatelor de reazem de a preluadeformaiile excesive induse de cutremur este cazul podului Showa, avariat grav în timpul cutremurului din1964 din Niigata, Japonia (vezi Figura 9.4a).
Răspunsul elastic al elementelor nedisipative (tablier, reazeme) se asigură pe baza principiilor de proiectarebazată pe capacitate (vezi seciunea 6.10.1). Astfel, eforturile de calcul din elementele nedisipative sedetermină pe baza echilibrului de fore la formarea mecanismului plastic, corespunzătoare eforturilor dinarticulaii plastice, inând cont de suprarezistena acestora (din cauza consolidării şi a rezistenei reale maimari decât cea caracteristică).
(a) (b)
Figura 9.3. Exemple de poduri cu distribuii nefavorabile ale rigidităii între pile în plan longitudinal (a)EN1998 -2, 2003, şi în plan transversal (b) Duan şi Chen, 2003.
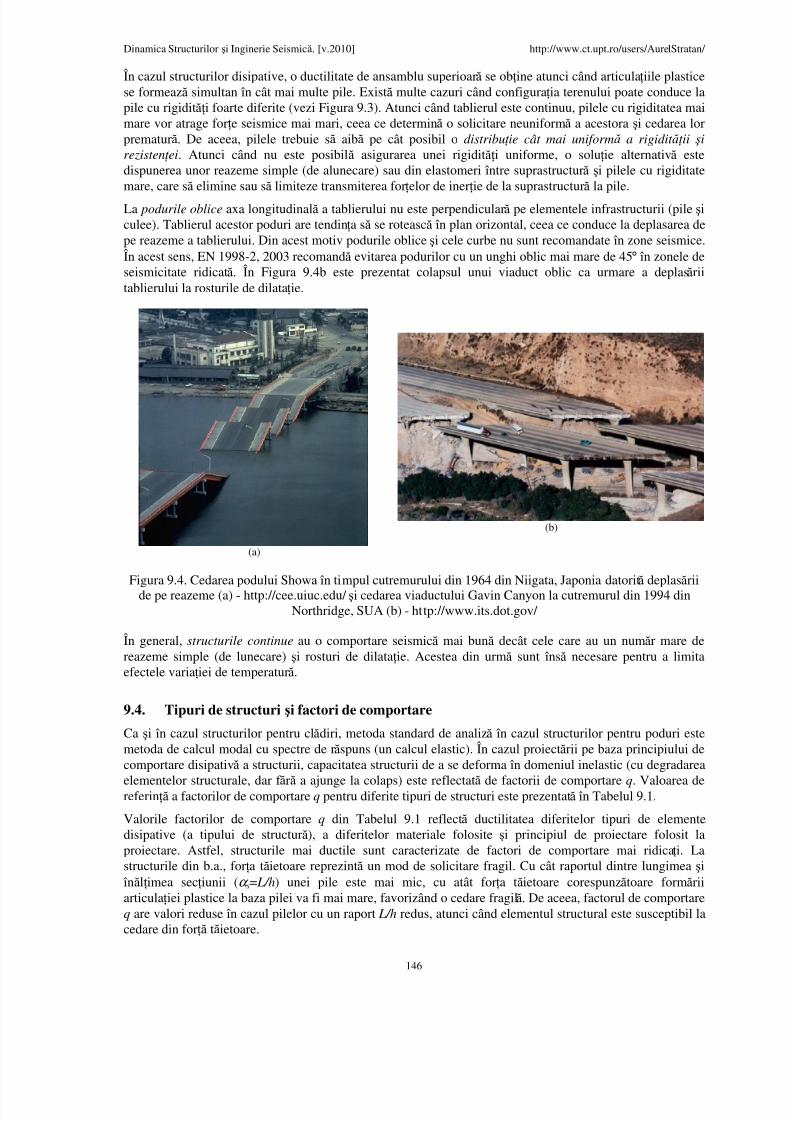
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 147/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
146
În cazul structurilor disipative, o ductilitate de ansamblu superioară se obine atunci când articulaiile plasticese formează simultan în cât mai multe pile. Există multe cazuri când configuraia terenului poate conduce lapile cu rigidităi foarte diferite (vezi Figura 9.3). Atunci când tablierul este continuu, pilele cu rigiditatea maimare vor atrage fore seismice mai mari, ceea ce determină o solicitare neuniformă a acestora şi cedarea lorprematură. De aceea, pilele trebuie să aibă pe cât posibil o distribu ie cât mai uniformă a rigidit ă ii şi
rezisten ei. Atunci când nu este posibilă asigurarea unei rigidităi uniforme, o soluie alternativă estedispunerea unor reazeme simple (de alunecare) sau din elastomeri între suprastructură şi pilele cu rigiditatemare, care să elimine sau să limiteze transmiterea forelor de inerie de la suprastructură la pile.
La podurile oblice axa longitudinală a tablierului nu este perpendiculară pe elementele infrastructurii (pile şiculee). Tablierul acestor poduri are tendina să se rotească în plan orizontal, ceea ce conduce la deplasarea depe reazeme a tablierului. Din acest motiv podurile oblice şi cele curbe nu sunt recomandate în zone seismice.În acest sens, EN 1998-2, 2003 recomandă evitarea podurilor cu un unghi oblic mai mare de 45° în zonele deseismicitate ridicată. În Figura 9.4b este prezentat colapsul unui viaduct oblic ca urmare a deplasăriitablierului la rosturile de dilataie.
(a)
(b)
Figura 9.4. Cedarea podului Showa în timpul cutremurului din 1964 din Niigata, Japonia datorită deplasăriide pe reazeme (a) - http://cee.uiuc.edu/ şi cedarea viaductului Gavin Canyon la cutremurul din 1994 din
Northridge, SUA (b) - http://www.its.dot.gov/
În general, structurile continue au o comportare seismică mai bună decât cele care au un număr mare dereazeme simple (de lunecare) şi rosturi de dilataie. Acestea din urmă sunt însă necesare pentru a limitaefectele variaiei de temperatură.
9.4. Tipuri de structuri şi factori de comportareCa şi în cazul structurilor pentru clădiri, metoda standard de analiză în cazul structurilor pentru poduri estemetoda de calcul modal cu spectre de răspuns (un calcul elastic). În cazul proiectării pe baza principiului decomportare disipativă a structurii, capacitatea structurii de a se deforma în domeniul inelastic (cu degradareaelementelor structurale, dar f ără a ajunge la colaps) este reflectată de factorii de comportare q. Valoarea dereferină a factorilor de comportare q pentru diferite tipuri de structuri este prezentată în Tabelul 9.1.
Valorile factorilor de comportare q din Tabelul 9.1 reflectă ductilitatea diferitelor tipuri de elementedisipative (a tipului de structură), a diferitelor materiale folosite şi principiul de proiectare folosit laproiectare. Astfel, structurile mai ductile sunt caracterizate de factori de comportare mai ridica i. Lastructurile din b.a., fora tăietoare reprezintă un mod de solicitare fragil. Cu cât raportul dintre lungimea şi
înălimea seciunii (α s= L/h) unei pile este mai mic, cu atât fora tăietoare corespunzătoare formăriiarticulaiei plastice la baza pilei va fi mai mare, favorizând o cedare fragilă. De aceea, factorul de comportareq are valori reduse în cazul pilelor cu un raport L/h redus, atunci când elementul structural este susceptibil lacedare din foră tăietoare.
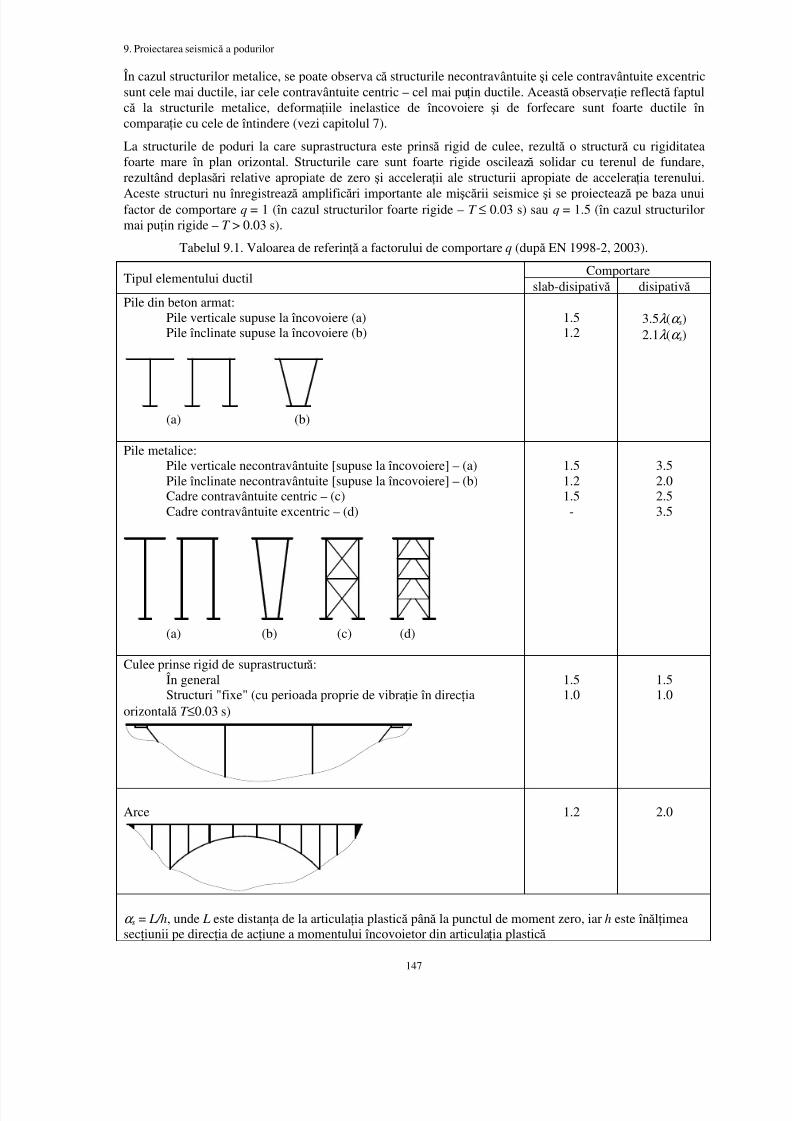
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 148/149
9. Proiectarea seismică a podurilor
147
În cazul structurilor metalice, se poate observa că structurile necontravântuite şi cele contravântuite excentricsunt cele mai ductile, iar cele contravântuite centric – cel mai puin ductile. Această observaie reflectă faptulcă la structurile metalice, deformaiile inelastice de încovoiere şi de forfecare sunt foarte ductile încomparaie cu cele de întindere (vezi capitolul 7).
La structurile de poduri la care suprastructura este prinsă rigid de culee, rezultă o structură cu rigiditateafoarte mare în plan orizontal. Structurile care sunt foarte rigide oscilează solidar cu terenul de fundare,
rezultând deplasări relative apropiate de zero şi acceleraii ale structurii apropiate de acceleraia terenului.Aceste structuri nu înregistrează amplificări importante ale mişcării seismice şi se proiectează pe baza unuifactor de comportare q = 1 (în cazul structurilor foarte rigide – T ≤ 0.03 s) sau q = 1.5 (în cazul structurilormai puin rigide – T > 0.03 s).
Tabelul 9.1. Valoarea de referină a factorului de comportare q (după EN 1998-2, 2003).
ComportareTipul elementului ductil
slab-disipativă disipativă Pile din beton armat:
Pile verticale supuse la încovoiere (a)Pile înclinate supuse la încovoiere (b)
(a) (b)
1.51.2
3.5λ (α s)2.1λ (α s)
Pile metalice:Pile verticale necontravântuite [supuse la încovoiere] – (a)Pile înclinate necontravântuite [supuse la încovoiere] – (b)Cadre contravântuite centric – (c)Cadre contravântuite excentric – (d)
(a) (b) (c) (d)
1.51.21.5-
3.52.02.53.5
Culee prinse rigid de suprastructură:În generalStructuri "fixe" (cu perioada proprie de vibraie în direcia
orizontală T ≤0.03 s)
1.51.0
1.51.0
Arce 1.2 2.0
α s = L/h, unde L este distana de la articulaia plastică până la punctul de moment zero, iar h este înălimeaseciunii pe direcia de aciune a momentului încovoietor din articulaia plastică
5/14/2018 Curs Dinamica - slidepdf.com
http://slidepdf.com/reader/full/curs-dinamica 149/149
Dinamica Structurilor şi Inginerie Seismică. [v.2010] http://www.ct.upt.ro/users/AurelStratan/
Pentru α s ≥ 3 λ (α s) =1.0
Pentru 3 > α s ≥ 1 ( ) 3s s
λ α α =
Factorii de comportare q din Tabelul 9.1 reprezintă valori de referină, care pot fi folosite în proiectare,atunci când structura îndeplineşte toate condiiile care să-i asigure un comportament ductil. Printre situaiilecare pot conduce la o ductilitate scăzută şi care necesită reducerea factorilor de comportare se numără următoarele (EN 1998-2, 2003): Structuri cu o alcătuire neregulat ă. Solicitarea neuniformă a elementelor disipative conduce la
concentrarea deformaiilor inelastice în câteva elemente structurale (pile), ducând la o ductilitate redusă lanivelul întregii structuri şi la o capacitate redusă de disipare a energiei seismice.
În cazul structurilor din b.a., valori ridicate ale for ei de compresiune pot reduce ductilitatea articulaiilorplastice de încovoiere. Valorile factorului de comportare din Tabelul 9.1 sunt valabile pentru fore axialedin gruparea seismică de încărcări care nu depăşesc 30% din rezistena seciunii la compresiune. Pentrufore axiale care depăşesc 30% din rezistena seciunii la compresiune, este necesară folosirea unui factorde comportare redus. În cazurile în care fora axială de calcul depăşeşte 60% din rezistena seciunii lacompresiune, nu se poate conta pe un comportament disipativ al structurii, încărcarea seismică fiind
determinată pe baza unui factor de comportare q = 1.Proiectarea pe baza conceptului de comportare disipativă implică acceptarea unor degradări în elementeledisipative în urma aciunii seismice de proiectare. Eventualele degradări ale elementelor de rezistenă trebuiesă poată fi inspectate şi remediate. De aceea, zonele disipative trebuie să fie accesibile. Atunci când acesteanu sunt accesibile pentru inspecie şi lucrări de remediere (de exemplu baza pilelor aflate în apă de adâncimemare) este necesară utilizarea unor factori de comportare reduşi faă de valorile de referină. Proiectarea pebaza unor factori de comportare reduşi va implica o cerină de ductilitate mai mică, adică degradări maireduse ale elementelor disipative. EN 1998-2 (2003) recomandă multiplicarea valorilor de referină afactorului de comportare q cu 0.6 atunci când zonele disipative nu sunt accesibile.








![3 CURS 13 Pozitionarea Dinamica [Compatibility Mode]](https://static.fdocumente.com/doc/165x107/55cf8e21550346703b8ee798/3-curs-13-pozitionarea-dinamica-compatibility-mode.jpg)