Curs Automobile
247
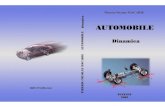
AMBREIAJUL 1 CAPITOLUL 3 AMBREIAJUL 3.1. Rolul, cerințele impuse și clasificarea ambreiajelor 3.1.1. Rolul ambreiajului Ambreiajul este subansamblul amplasat între motor și transmisie, care reprezintă un cuplaj de legătură între arborele cotit al motorului 1 și schimbătorul de viteze (cutia de viteze) 3, fiind montat în vecinătatea volantului motorului (figura 3.1, zona 2) și cu ale cărui dimensiuni este compatibil. Figura 3.1 Dispunerea ambreiajului în echipamentul de propulsie Ambreiajul este inclus în transmisia autovehiculului în scopul compensării principalelor dezavantaje ale motorului cu ardere internă, care constau în: imposibilitatea pornirii sub sarcină, existența unei zone de funcționare instabile și mersul neuniform al arborelui cotit. Necesitatea includerii ambreiajului în transmisia autovehiculului este determinată și de particularitățile funcționării acesteia, caracterizate mai ales de cuplarea și decuplarea motorului. Decuplarea este necesară la oprirea și frânarea totală a autovehiculului sau la schimbarea treptelor de viteze, iar cuplarea este necesară la pornirea din loc și după schimbarea treptelor de viteze. Cuplarea lină a arborelui primar al cutiei de viteze cu arborele cotit al motorului, care are o turație ridicată, asigură creșterea treptată și fără șocuri a sarcinii la dinții roților dințate și la piesele transmisiei, fapt care reduce uzura și elimină posibilitatea ruperii lor.
-
Upload
cristina-andreea -
Category
Documents
-
view
286 -
download
6
Transcript of Curs Automobile

AMBREIAJUL
1
CAPITOLUL 3
AMBREIAJUL
3.1. Rolul, cerințele impuse și clasificarea ambreiajelor
3.1.1. Rolul ambreiajului Ambreiajul este subansamblul amplasat între motor și transmisie, care reprezintă un cuplaj de legătură între arborele cotit al motorului 1 și schimbătorul de viteze (cutia de viteze) 3, fiind montat în vecinătatea volantului motorului (figura 3.1, zona 2) și cu ale cărui dimensiuni este compatibil.
Figura 3.1 Dispunerea ambreiajului în echipamentul de propulsie
Ambreiajul este inclus în transmisia autovehiculului în scopul
compensării principalelor dezavantaje ale motorului cu ardere internă, care constau în: imposibilitatea pornirii sub sarcină, existența unei zone de funcționare instabile și mersul neuniform al arborelui cotit. Necesitatea includerii ambreiajului în transmisia autovehiculului este determinată și de particularitățile funcționării acesteia, caracterizate mai ales de cuplarea și decuplarea motorului.
Decuplarea este necesară la oprirea și frânarea totală a autovehiculului sau la schimbarea treptelor de viteze, iar cuplarea este necesară la pornirea din loc și după schimbarea treptelor de viteze.
Cuplarea lină a arborelui primar al cutiei de viteze cu arborele cotit al motorului, care are o turație ridicată, asigură creșterea treptată și fără șocuri a sarcinii la dinții roților dințate și la piesele transmisiei, fapt care reduce uzura și elimină posibilitatea ruperii lor.

AMBREIAJUL
2
Prin decuplarea transmisiei de motor, roțile dințate din cutia de viteze nu se mai află sub sarcină și cuplarea lor se poate face fără eforturi mari între dinți.
În caz contrar, schimbarea treptelor de viteze este însoțită de zgomot puternic, iar uzura dinților este deosebit de mare, putând avea loc chiar distrugerea lor.
Particularitățile de funcționare ale ambreiajelor sunt caracterizate de diagrama cuplării la plecarea din loc a autovehiculului, reprezentată în figura 3.2, în care pe abscisă este reprezentat timpul t, iar pe ordonată - momentul de frecare al ambreiajului Ma, turația motorului n, turația transmisiei (părții conduse a ambreiajului) n
a și viteza de patinare între părțile conduse și
conducătoare vp.
Figura 3.2 Graficul procesului de funcționare al ambreiajului la demararea autovehiculului
Cuplarea ambreiajului la demararea autovehiculului începe din momentul atingerii suprafețelor de frecare ale părților conducătoare (suprafețele frontale ale volantului și discului de presiune) și conduse (în cazul ambreiajelor cu fricțiune-garniturile de frecare) și se termină la egalizarea vitezelor lor unghiulare de rotație. La pornirea din loc a autovehiculului, accelerarea maselor părții conduse a ambreiajului începe de la viteza unghiulară ωa=0, iar la
schimbarea treptelor de viteză masele pieselor conduse, în momentul cuplării ambreiajului, se rotesc deja cu o viteză unghiulară ωa.
Procesul cuplării ambreiajului (corespunzător timpului tc) constă în două etape (figura 3.2). Prima etapă (cu durata t1) începe din momentul atingerii suprafețelor de frecare, când momentul de frecare al ambreiajului Ma este egal cu Ma=0 (punctul A), și se termină când momentul de frecare egalează momentul de rezistență la deplasarea autovehiculului Mr, care acționează asupra
arborelui ambreiajului (arborele primar al cutiei de viteze), adică în punctul B, în care Ma =Mr. Din acest moment, se trece în a doua etapă a cuplării (corespunzătoare timpului t2), caracterizată de începerea demarajului
Ma
n na Vp
E G n C
D Vp
na
K Ma=Mr B
L
t1 t2
tc
t A
Ma

AMBREIAJUL
3
autovehiculului și de reducerea treptată a patinării (n-na), până la dispariția ei
completă (punctul K). Din diagrama procesului de cuplare a ambreiajului se observă că momentul de frecare crește după curba ABC. În punctul B, momentul de frecare este egal cu momentul de rezistență la deplasarea autovehiculului (plecarea din loc).
Variația turației motorului n în timpul cuplării este dată de curba EGD care arată că, în prima etapă, din momentul atingerii suprafețelor de frecare (punctul E) și până la plecarea din loc a autovehiculului (punctul G), turația motorului crește, iar în a doua etapă, care durează până la sfârșitul patinării (punctul D), turația motorului scade. Curba FD caracterizează variația turației transmisiei (părții conduse a ambreiajului) n
a, începând din momentul egalizării
momentelor (Ma=Mr), până în punctul D, unde devine egală cu turația motorului (n
a=n). Viteza de patinare vp, dintre părțile conduse și conducătoare
ale ambreiajului se schimbă în timpul cuplării, conform curbei LK, respectiv la începutul cuplării (punctul L) patinarea este totală, iar la sfârșitul ei (punctul K) patinarea este zero. Particularitățile procesului de funcționare descris mai sus se referă la ambreiajele mecanice, dar sunt valabile și pentru celelalte tipuri, deși modul de transmitere este diferit.
3.1.2. Cerințele impuse ambreiajelor
Ținând seama de fenomenele prezentate anterior, un ambreiaj bine conceput și corespunzător reglat trebuie să îndeplinească următoarele cerințe:
a. La decuplare: - să izoleze rapid și complet motorul de transmisie, pentru a face posibilă
schimbarea vitezelor fără șocuri; - decuplarea să necesite din partea conducătorului eforturi reduse, fără a avea însă o cursă prea mare la pedală;
b. La cuplare: - să îmbine lin motorul cu transmisia, pentru a evita pornirea bruscă din
loc a autovehiculului și șocurile în mecanismele transmisiei; - să permită eliminarea căldurii care se produce în timpul procesului de cuplare la patinarea ambreiajului. c. În stare cuplată:
- să asigure o îmbinare perfectă între motor și transmisie, fără patinare, elementele conduse ale ambreiajului să aibă momente de inerție cât mai reduse pentru micșorarea sarcinilor dinamice în transmisie; În afara acestor cerințe prezentate mai sus pentru diferite faze de funcționare, ambreiajul trebuie să mai îndeplinească următoarele cerințe: - momentul de inerție al părții conduse, solidară la rotație cu arborele primar al cutiei de viteze, să fie cât mai mic;

AMBREIAJUL
4
- să aibă o funcționare sigură, de lungă durată și întreținere ușoară; - acționarea să fie simplă și cu eforturi în limitele admise;
- să permită o bună transmitere a căldurii în mediul înconjurător; - construcția să fie simplă, tehnologică și ieftină.
3.1.3. Clasificarea ambreiajelor
Ambreiajele folosite în construcția de autovehicule se pot clasifica astfel: - după modul de transmitere a momentului; - după modul de acționare. Din punctul de vedere al modului de transmitere a momentului, ambreiajele se împart în: - ambreiaje simple; - ambreiaje combinate. La rândul lor, ambreiajele simple se împart în: - ambreiaje mecanice (de fricțiune): - ambreiaje hidraulice; - ambreiaje electromagnetice. Ambreiajele mecanice pot fi: - după numărul discurilor: monodisc; cu mai multe discuri de fricțiune; - după poziția de dispunere a arcurilor: cu arcuri dispuse periferic; cu arc central spiral sau cu diafragmă; - centrifuge sau semicentrifuge. Ambreiajele hidraulice pot fi: cu prag fix; cu prag mobil sau cu cameră de colectare. Ambreiajele electromagnetice pot fi: cu sau fără pulbere feromagnetică. Ambreiajele combinate pot fi: - mecano-centrifuge; - mecano-hidraulice; - mecano-electromagnetice. Din punctul de vedere al modului de acționare, ambreiajele de autovehicule se împart în: - ambreiaje neautomate (puse în funcțiune de forța musculară a conducătorului, prin acțiunea mecanică sau hidraulică); - ambreiaje automate; - ambreiaje acționate hidraulic; - ambreiaje acționate pneumatic; - ambreiaje acționate vacumatic; - ambreiaje acționate electric; Uneori sistemul de acționare a ambreiajelor neautomate este prevăzut cu un servomecanism de tip mecanic, hidraulic sau pneumatic, care reduce efortul depus de conducător.

AMBREIAJUL
5
3.2. Construcția ambreiajelor mecanice
În construcția de autovehicule, ambreiajele mecanice (de fricțiune) au căpătat răspândirea cea mai largă, dat fiind faptul că ele satisfac în bună măsură cerințele principale, respectiv: sunt simple, ieftine, sigure în exploatare, ușor de manevrat și au momente de inerție mici ale pieselor părții conduse. Funcționarea ambreiajelor mecanice este bazată pe folosirea forțelor de frecare ce apar între suprafețele părților conduse și conducătoare ale acestora. Ambreiajele mecanice folosite în construcția de autovehicule pot avea unul sau două discuri de fricțiune, în funcție de mărimea momentului de torsiune transmis. Dintre ambreiajele simple, utilizarea cea mai largă au căpătat-o cele cu un singur disc de fricțiune, datorită simplității construcției, greutății reduse și costului mai mic. Construcția ambreiajelor mecanice cu un singur disc, cu arcuri periferice, este dată în figura 3.5 (reprezentare schematică și secțiune longitudinală).
Figura 3.5 Ambreiajul cu arcuri periferice
1 - arborele cotit al motorului; 2 - discul condus; 3 - volantul; 4 - șuruburi fixare carcasă; 5 - carcasă; 6 - discul de presiune; 7 - articulație; 8 - pârghiile de
decuplare; 9 - suport pârghie; 10 - carter ambreiaj; 11 - rulmentul de presiune; 12 - arborele ambreiajului; 13 - manșonul de decuplare; 14 - arcurile de presiune
periferice; 15 - garnitură izolatoare; 16 - coroana dințată pornire motor; 17 - piuliță; 18 -șuruburi fixare volant; 19 - lagăr arbore ambreiaj.

AMBREIAJUL
6
Folosirea acestui ambreiaj se recomandă atunci când momentul transmis nu este mai mare de 700-800 [Nm].
Momentul maxim transmis de ambreiaj depinde de forța dezvoltată de arcuri, de dimensiunile discurilor, de coeficientul de frecare și de numărul suprafețelor de frecare. Posibilitatea măririi coeficientului de frecare pentru materialele existente este limitată, mărirea diametrelor discurilor este, de asemenea, limitată de dimensiunile volantului motorului, iar forța dezvoltată de arcuri nu poate fi oricât de mare, deoarece crește în mod nepermis încărcarea specifică, iar acționarea ambreiajului se face mai greu. Din aceste motive, la transmiterea unui moment mai mare de 800 Nm, se recomandă folosirea ambreiajului cu două discuri, de tipul celui reprezentat în figura 3.5 (reprezentare schematică și secțiune longitudinală).
Figura 3.6 Ambreiaj cu arcuri periferice bidisc
1-arborele cotit al motorului; 2-discurile conduse ale ambreiajului; 3-discul de presiune; 4-discul de presiune intermediar; 5-volantul; 6-șuruburi de fixare a
pârghilor; 7-piuliță; 8-pârghie de decuplare; 9-carcasă; 10-carter ambreiaj; 11-rulmentul de presiune; 12-arcuri de revenire manșon; 13-manșonul de decuplare;
14-arborele ambreiajului; 15-furca ambreiajului; 16-arcurile de presiune periferice; 17-garnitură izolatoare; 18-șuruburi; 19-prezon; 20-coroana dințată pornire motor; 21-piuliță; 22-șuruburi fixare volant; 23-piuliță; 24-lagăr arbore
ambreiaj. Creșterea momentului de frecare prin mărirea numărului discurilor ambreiajului nu aduce schimbări în schema de principiu a acestuia, ci impune doar mărirea de piese similare. O oarecare dificultate constructivă la aceste

AMBREIAJUL
7
ambreiaje o constituie necesitatea asigurării unei deplasări forțate a discului de presiune intermediar 4, în scopul obținerii unei decuplări rapide și totale. O influență deosebită asupra construcției ambreiajelor mecanice o are dispunerea arcurilor de presiune, care pot fi periferice sau centrale. În funcție de numărul lor, arcurile periferice cilindrice se dispun pe un cerc așa cum s-a observat la variantele prezentate anterior s-au pe două cercuri concentrice așa cum se observă din figura 3.7.
Figura 3.7 Ambreiaj cu arcuri periferice pe două cercuri concentrice
1-arborele cotit al motorului; 2-lagăr arbore ambreiaj; 3-șuruburi fixare volant; 4-arborele ambreiajului; 5-volantul; 6-discul condus; 7-discul de presiune; 8-
articulație; 9-carcasă; 10-suport pârghie; 11-arc de fixare a discului intermediar; 12-pârghiile de decuplare; 13-rulmentul de presiune; 14-cater ambreiaj; 15-manșonul de decuplare; 16-furca ambreiajului; 17-șuruburi fixare carcasă; 18-arcurile de presiune periferice; 19-coroană dințată pornire motor;20-garnitură
izolatoare; 21-discul intermediar de decuplare.
În figura 3.8 și figura 3.9 sunt prezentate variante de ambreiaje cu arc central. Ambreiajele cu arc central (axa arcului se confundă cu cea a ambreiajului) pot fi cu arc spiral (cilindric, conic, parabolic) sau cu arc central sub formă de difragmă. În figura 3.8 avem prezentată construcția unui ambreiaj cu arc central conic. În figura 3.9 avem prezentată construcția unui ambreiaj cu arc central tip diafragmă cu tăieturi după generatoare (schemă cinematică și secțiune longitudinală).

AMBREIAJUL
8
La această variantă, forța de apăsare este realizată de arcul central tip diafragmă cu tăieturi după generatoare 14, care îndeplinește un dublu rol: arc de presiune și pârghii de decuplare.
Decuplarea ambreiajului se realizează prin acționarea mecanismului de comandă care crează forța de decuplare, sub acțiunea căreia manșonul de decuplare 13 cu rulmentul de presiune 11, se deplasează axial spre stânga, acționând asupra sectoarelor din arcul central 14 care au rol de pârghii de decuplare. Arcul se rotește în raport cu capetele niturilor 28 și eliberează discul de presiune care se deplasează înspre dreapta sub acțiunea arcurilor lamelare 29, lăsând discul condus 2, liber.
Figura 3.8 Figura 3.9
1-arborele cotit al motorului; 2-discul condus; 3-volantul; 4-șuruburi fixare carcasă; 5-carcasă ambreiaj; 6-discul de presiune; 10-carterul ambreiajului; 11-rulmentul de presiune; 12-arborele ambreiajului; 13-manșonul de decuplare; 14-
arcul de presiune central (elicoidal conic și tip diafragmă cu tăieturi după generatoare); 16-coroana dințată de pornire a motorului; 17-șurub de fixare a
volantului; 19-lagărul arborelui ambreiajului; 28-nit reazem arc central; 29-arc lamelar ; 38-nit 1; 39-nit 2.
Prin analiza comparativă a celor două tipuri de ambreiaje, la ambreiajele
cu arcuri periferice se constată următoarele: - apăsarea discului de presiune pe suprafața de frecare se face neuniform;
- montarea arcurilor impune o serie de prevederi constructive legate de menținerea lor contra acțiunii forței centrifuge la funcționarea motorului și de evitarea acțiunii directe a fluxului de căldură rezultat în fazele de patinare ale ambreiajului;
- pârghiile de decuplare impun operații laborioase de reglare pentru dispunerea capetelor inferioare într-un plan paralel cu planul de decuplare;

AMBREIAJUL
9
- gabarit axial mărit, determinat de caracteristicile constructive ale arcurilor;
- fiabilitate redusă datorită existenței unui număr mare de piese și cuple mobile și cu frecare ce intră în compunerea mecanismului ambreiaj.
Pentru analiza comparativă a caracteristicilor de funcționare ale celor două tipuri de ambreiaje, în figura 3.10 este prezentată caracteristica arcurilor prin dependența dintre forța elastică (F) și deformația (f).
Figura 10 Caracteristicile de funcționare ale ambreiajelor mecanice cu arcuri
Curba 1 corespunde ambreiajului cu arcuri periferice, iar curba 2
ambreiajului cu arc central tip diafragmă cu tăieturi după generatoare. Considerând că ambele tipuri de ambreiaje dezvoltă inițial același moment, bazat pe dependența liniară dintre forța arcurilor și momentul capabil al ambreiajului, starea inițială cuplată corespunde punctului C cu coordonatele (Fc,fc). Față de valoarea săgeții din stare cuplată a ambreiajului (fc), sporirea deformației corespunde cursei de debreiere, iar reducerea deformației corespunde compensării uzurilor de frecare ale discului condus. Dacă ∆h este cursa necesară debreierii, punctele C1 și C2 corespund poziției decuplate, iar punctele U1 și U2, corespunzătoare detensionării arcurilor cu mărimea ∆u, stării de uzură maximă a garniturilor. Din analiza celor două caracteristici rezultă următoarele:
- acționarea ambreiajului cu arc central diafragmă este mai ușoară deoarece forța necesară pentru menținerera ambreiajului în poziție decuplată este mai redusă (FD2<<FD1);
- ambreiajul cu arc central diafragmă prezintă o progresivitate ridicată la cuplare datorită elasticității mari a arcului;
- ambreiajul cu arc central diafragmă nu are tendința de patinare la uzarea garniturilor, deoarece momentul capabil al ambreiajului se menține în jurul valorii nominale de nou pe toată durata de funcționare a ambreiajului (corespunzătoare uzării garniturilor cu mărimea ∆h);
- toate elementele constructive sunt piese, corpuri de rotație, astfel că echilibrarea lor se poate realiza cu ușurință.

AMBREIAJUL
10
Aceste particularități constructive și funcționale prezentate mai sus
motivează utilizarea generalizată a ambreiajelor cu arc central diafragmă la toate tipurile de autoturisme concepute după ani 1980-1985, de când obținerea arcului diafragmă nu a mai prezentat o dificultate tehnologică.
Figura 3.11 Figura 3.12 Ambreiaj cu arcuri periferice semicentrifugal Ambreiaj centrifugal
1-contragreutate 1-volantul motorului; 2-arcuri care mențin ambreiajul decuplat; 3-disc de presiune; 4-disc reactiv; 5-disc de fricțiune; 6-carcasa; 7-contragreutăți articulate de carcasă; 8-arcuri de presiune.
Tendințele de obținere a unei plecări din loc cât mai line și de ușurare a acționării ambreiajului au dus la construirea și utilizarea ambreiajelor semicentrifuge, la care presiunea dintre discuri se asigură atât cu ajutorul unor arcuri mai slabe, cât și cu ajutorul forțelor centrifuge ale greutăților 1 de la capetele pârghiilor de decuplare. Construcția unui ambreiaj semicentrifug este reprezentată în figura 3.11. La ambreiajele semicentrifuge, forța de presiune dată de arcuri este cu aproximativ 30% mai mică decât la ambreiajele obișnuite similare. Aceasta permite reducerea efortului de decuplare la turații mici, însă la turații mari efortul de decuplare crește foarte mult. Din această cauză, ambreiajele semicentrifuge se construiesc cu un singur disc de presiune și se utilizează numai la autoturisme, autocamioane de tonaj redus și microbuze. Din categoria ambreiajelor mecanice fac parte și ambreiajele centrifuge figura 3.12, care au o acțiune automată, în sensul că atât procesul cuplării, cât și al decuplării sunt legate de regimul de funcționare al motorului.

AMBREIAJUL
11
Atunci când motorul nu funcționează, ambreiajul este decuplat, iar în intervalul unor turații stabilite, se cuplează sub acțiunea forțelor centrifuge ale unor pârghii prevăzute cu greutăți la capete. Avantajele principale ale ambreiajelor centrifuge sunt: cuplarea lină la plecarea din loc a autovehiculului și decuplarea automată la reducerea turației motorului până la mersul în gol, ceea ce împiedică oprirea lui. Dezavantajele ambreiajelor centrifuge sunt: posibilitatea patinării la turații relativ reduse și sarcini mari ale motorului; imposibilitatea pornirii motorului prin împingerea autovehiculului; funcționarea cu regim termic mai ridicat, ca urmare a patinării îndelungate; imposibilitatea utilizării frânei de motor. Unele dintre aceste dezavantaje pot fi eliminate prin utilizarea unor dispozitive, care însă măresc complexitatea construcției. Toate acestea fac ca ambreiajele centrifuge să fie utilizate în transmisiile automate combinate cu alte tipuri de ambreiaje.
3.3. Elementele constructive ale ambreiajelor.
3.3.1. Volantul.
Rolul principal al volantului (determinat de motorul autovehiculului), este de acumulator de energie cinetică pentru reducerea gradului de neuniformitate a vitezei unghiulare a arborelui cotit, astfel că forma și dimensiunile lui sunt determinate în mod esențial de tipul motorului (cu aprindere prin scânteie, cu aprindere prin comprimare) și regimul acestuia de funcționare (lent sau rapid).
Volantul este fixat pe arborele cotit al motorului într-o poziție bine definită cu ajutorul unor elemente de asamblare demontabile (șuruburi cu asamblare directă în găurile filetate din flanșa arborelui cotit sau șuruburi, piulițe și elemente de siguranță, caz în care flanșele arborelui cotit și volantului au găuri de trecere). În zona exterioară a acestuia se găsesc coroana dispozitivului de pornire a motorului (demarorul, fixat de regulă pe carterul ambreiajului), precum și coroana traductorului de turație al sistemului de alimentare, aprindere sau diagnosticare (dacă este cazul). Construcția volantului este determinată de rolul funcțional pe care îl îndeplinește pentru motor, iar configurația acestuia este influențată de tipul mecanismului de ambreiaj cu care acesta este asamblat.
Volantul clasic se întâlnește în două variante constructive: - volantul monobloc plat sau cu obadă, constituit ca o piesă masivă din
fontă; - volantul modular. Volantul monobloc plat este cel mai utilizat la construcțiile actuale de
autovehicule, iar ca materiale din care se execută, fonta cenușie (Fc250) este întâlnită la motoarele clasice, iar fonta nodulară (Fgn) în cazul motoarelor ce funcționează la turație ridicate.

AMBREIAJUL
12
Volantul modular prezentat în figura 3.13 (care constituie o soluție de viitor datorită reducerilor costurilor de fabricație), este construit dintr-un disc de oțel (care este asamblat cu arborele cotit al motorului) de care se fixează volantul propriu-zis, confecționat din fontă și având forma unei coroane. În figura 3.13.a, este prezentată varianta propusă de VALEO la care discul de oțel 1, solidarizat cu arborele cotit al motorului, se fixează prin șuruburile 3 de volantul 2. Pe partea exterioară a discului de oțel este prelucrată prin ștanțare coroana traductorului de turație și aproximativ la același nivel pe o porțiune cilindrică a acestuia, este fixată prin ajustaj cu strângere, coroana dințată de pornire a motorului 5.
a) b) Figura 3.13
Volantul modular 1-discul de oțel; 2-volantul; 3-șurub fixare volant; 4-coroana de pornire a
motorului; 5-coroana traductorului de turație
În figura 3.13,b este prezentată varianta produsă de firma LUK, pentru VW Golf, la care este simplificată mult construcția ambreiajului, deoarece discul de oțel 1 al volantului modular, îndeplinește și funcția de carcasă a ambreiajului. La volantul din figura 3.14, dezvoltat de constructorii consacrați de ambreiaje (VALEO, LUK sau SACHS), s-a asociat funcționarea volantului de inerție, cu cel de element elastic suplimentar și element izolator pentru vibrațiile de torsiune din grupul motopropulsor.
Dublul volant este compus dintr-un volant primar 1, fixat pe arborele cotit al motorului și un volant secundar 3, pe care se montează mecanismul ambreiaj.
2
1
4
3
2
1
5 5

AMBREIAJUL
13
Între cei doi volanți, centrați prin rulmentul 4, este amplasat izolatorul de vibrații torsionale, compus din arcurile elicoidale 2 și amortizorul 5, format dintr-un pachet de inele de frecare. Datorită spațiului disponibil în gabaritul volantului motor, dimensiunile izolatorului de vibrații pot fi majorate față de cazul dispunerii lui în discul condus al ambreiajului și prin urmare, rezultă un filtraj al vibrațiilor torsionale foarte bun chiar și în regimuri de funcționare la turații reduse.
Figura 3.14 Volantul cu element elastic suplimentar și element izolator pentru vibrațiile de
torsiune 1.volantul primar; 2-arcurile elicoidale; 3-volantul secundar; 4-rulment; 5-amortizorul.
Prin înserierea arcurilor 2 între cei doi volanți acesta îndeplinește și rolul
dispozitivului elastic suplimentar pentru limitarea momentului la cuplarea bruscă a ambreiajului.
3.3.2. Mecanismul ambreiaj Mecanismul ambreiaj este subansamblul ce asigură apăsarea și eliberarea
discului de fricțiune, poziționat între acesta și volant. Fixarea acestuia pe volant este realizată cu elemente demontabile (șuruburi și elemente de siguranță) și elemente de centrare, dispuse în zona periferică. Principalele cerințe funcționale ale acestui subansamblu sunt: - să exercite o presiune uniform repartizată asupra discului de fricțiune; - să fie bine echilibrat dinamic; - să aibă gabarit axial minim.
1
2
3
4
5

AMBREIAJUL
14
În componența acestui ansamblu se găsesc următoarele elemente principale: discul de presiune, dispozitivul elastic de apăsare (presiune), carcasa ambreiajului. Discul de presiune, este solidar la rotație cu volantul și trebuie să aibă posibilitatea, ca în momentul decuplării sau cuplării, să se deplaseze axial față de volant.
a) b) c) d) Figura 3.15
2-discul condus; 3-volantul motrului; 5-carcasa ambreiajului; 6-discul de presiune; 8-pîrghie de decuplare; 30-discul de presiune intermediar; 35-prezon;
36-piuliță; 40-știft frontal; 41-știft radial
Solidarizarea în mișcare de rotație și ghidarea axială a discului de presiune cu volantul se realizează în mai multe variante constructive după cum urmează: - cu umeri ai discului și ferestre în carcasă (figura 3.15.a); - cu știft frontal în carcasă și caneluri radiale în discul de presiune (figura 3.15.b); - cu prezon și găuri de trecere radiale, practicate atât în discul de presiune cât și în cel intermediar (figura 3.15.c);
a) b) b) Figura 3.16
5-carcasa ambreiajului; 6-discul de presiune; 29-arc lamelar. - cu știft radial fixat în volant 41 și caneluri radiale la discul intermediar
30, iar pentru discul de presiune umăr și locaș frontal în carcasă (figura 3.15.d);
8
5
6
Fereastra carcasei
Umerii discului 2
41
3
6
36
35
30
3
5
5
2
3
2
40
6
30 6
5
Umerii discului
Locas in carcasa
Stift frontal Sitft radial Prezon
Arc
6 5 29 6 5 6 5 29 29
Arc lamelar Arc lamelar

AMBREIAJUL
15
- cu lamele dispuse: tangențial (figura 3.16.a); în triunghi (figura 3.16.b); radial (figura 3.16.c); Discul de presiune este o piesă sub formă de coroană circulară confecționată din fontă sau oțel, care pentru asigurarea unei apăsări uniforme asupra suprafețelor de frecare ale discului condus, trebuie să fie rigidă, iar pentru a asigura transferul unei cantități cât mai mare de căldură rezultată din procesul patinării ambreiajului, pe partea opusă a suprafeței de frecare, va fi prevăzut cu aripioare de răcire. Dispozitivul elastic de apăsare (presiune) este alcătuit din arcurile care realizează forța necesară de apăsare asupra discului condus și care pot fi grupate în două categorii: periferice și centrale. Arcurile periferice sunt în general cilindrice, din sârmă de oțel cu secțiune circulară. Numărul lor depinde de mărimea momentului ce trebuie transmis și de diametrul exterior al discului condus. Arcurile periferice 14, (figura 3.17.a,b) sunt elicoidale cilindrice, se montează pe unul sau mai multe rânduri, se centrează pe discul de presiune 6 cu ajutorul unor bosaje ale acestuia, iar pentru a evita transmiterea căldurii de la discul de presiune la arcuri, între ele se montează șaibele termoizolante 15. Caracteristica acestor arcuri este liniară.
Figura 3.17 Arcurile centrale pot fi cilindrice (figura 3.18.a), conice (figura 3.18.b) sau de tip diafragmă cu tăieturi după generatoare (figura 3.18.c). Arcurile conice și arcurile diafragmă au caracteristică neliniară.
Figura 3.18
b) 14 15 6
a)
a)
b) c)

AMBREIAJUL
16
Materialele recomandate pentru confecționarea arcurilor sunt oțelurile pentru arcuri STAS 795-80.
Figura 3.19 Carcasa și carterul ambreiajului. Carcasa (figura 3.19) este fixată rigid de volantul motorului prin șuruburi constituind suport pentru arcurile de presiune și elementele de solidarizare în rotație și ghidare axială a discului de presiune.
În partea centrală, carcasa are o deschizătură circulară, prin care trece arborele ambreiajului și manșonul de decuplare. Este realizată fie din tablă de oțel cu conținut redus de carbon prin ambutisare, fie din fontă prin turnare. Carterul ambreiajului poate fi executat comun cu carterul cutiei de viteze, iar la altele separat.
Forma și dimensiunile carterului depind de construcția ambreiajului. Carterul poate fi realizat dintr-o singură bucată și atunci se toarnă din fontă sau aluminiu, sau din două bucăți, soluție la care ambele piese pot fi turnate din fontă, sau soluția la care partea superioară se obține prin turnare iar partea inferioară prin ștanțare din tablă de oțel. 3.3.3. Discul condus
Discul condus (discul de fricțiune) reprezintă un subansamblu constructiv al părții conduse a ambreiajului, care, sub acțiunea forțelor axiale dezvoltate în mecanismul ambreiaj, permite transmiterea fluxului de putere al motorului la arborele condus al ambreiajului.
Principalele cerințe funcționale ale acestui subansamblu sunt: să transmită integral momentul motor; să utilizeze cu eficacitate forța furnizată de mecanismul ambreiaj; să asigure progresivitate la cuplarea ambreiajului la pornirea din loc sau după schimbarea treptei de viteză; să permită o bună ventilare; să asigure izolarea vibrațiilor de torsiune provenite de la motor pentru a proteja transmisia.
În construcția de automobile se utilizează două tipuri de discuri conduse: discuri cu amortizoare pentru oscilațiile de torsiune și discuri fără amortizoare pentru oscilațiile de torsiune.

AMBREIAJUL
17
Figura 3.20 Discul condus al ambreiajelor
1 și 10-garnituri de fricțiune; 2-discul suport; 3 și 9-discuri laterale; 4 și 7-garnituri; 5-nituri de distanțare; 6-butucul cu flanșă; 8-arcuri elicoidale;
În construcția de automobile se utilizează două tipuri de discuri conduse:
discuri cu amortizoare pentru oscilațiile de torsiune și discuri fără amortizoare pentru oscilațiile de torsiune. Discul cu amortizoare pentru oscilațiile de torsiune este prezentat în figura 3.20 (vedere și secțiune longitudinală după traseul A-A), figura 3.21 (vedere spațială-în explozie).
Discul suport 2 din componența discului condus al ambreiajului este confecționat din oțel și are dublu rol: fixarea garniturilor de fricțiune și transmiterea momentului de torsiune între garniturile de fricțiune și butucul discului
Figura 3.21 1 și 10-garnituri de frecare; 2-discul suport; 3 și 9- discuri suplimentare de închidere; 4 și 7-
inele de frecare intermediar; 6-butucul cu flanșă; 8-arcuri elicoidale. La cuplare, creșterea momentului capabil al ambreiajului depinde de
proprietățile elastice ale ambreiajului și de ritmul cuplării.
A
6
7 9 5
1
1
2 1
3 4
8
8
A - A
A
3 şi 9 5 7 8 6 4 10 2 1

AMBREIAJUL
18
Proprietățile elastice în direcție axială ale discului au importanță deosebită asupra cuplării line a ambreiajului. Progresivitatea cuplării este asigurată și de elasticitatea axială a discului condus, care diferă din punct de vedere constructiv de la un tip de ambreiaj la altul. La unele ambreiaje, progresivitatea axială la cuplare se obține prin realizarea unei mici conicități a discului de oțel, astfel încât la cuplare nu începe să lucreze cu toată suprafața, ci treptat. La soluția din figura 3.22,a, discul de oțel are tăieturi radiale, fiind împărțit în sectoare îndoite alternativ înăuntru și în afară, rezultând un disc ondulat.
a) b) Figura 3.22
1,3-garnituri de fricțiune; 2-discul suport; 11-arc lamelar ondulat; 12-nit.
Pe fiecare parte a discului 1 se montează prin nituire garniturile de frecare 1 și 3, pe sectoarele a căror curbură este îndreptată spre garnitură. Apare jocul j=1...2 mm, care asigură o elasticitate mărită și o cuplare lină. În cazul din figura 3.22,b, discul 2 se execută plat, însă între el și garniturile de frecare 3 se introduc arcuri ondulate 11, fixate de acest disc cu niturile 12. De ambele părți, se fixează cele două garnituri de fricțiune, una direct pe discul plat de oțel 2, iar cealaltă pe arcurile ondulate 11.
Există și soluția din figura 3.23 la care în zona periferică a discului suport 2 care este plat, sunt fixate cu ajutorul niturilor o serie de lamele elastice 13 de care se prind garniturile de frecare 1 și 3.
Garniturile de frecare sunt confecționate din țesătură de azbest cu incluziuni din fire metalice (cupru, zinc, alamă, etc.) impregnată cu rășini sintetice, bachelită, cauciuc, sau sunt confecționate din materiale metalo-plastice sau metalo-ceramice.
12
2
11
3
1
d=1-
1
2 3
j 2

AMBREIAJUL
19
Figura 3.23 Cerințele principale impuse garniturilor de frecare sunt: să asigure coeficientul de frecare dorit și asupra lor variațiile de temperatură, ale vitezei de alunecare și ale încărcării specifice să aibă influență mică; să aibă o rezistență ridicată la uzare, mai ales la temperaturi înalte; să-și refacă rapid proprietățile de fricțiune inițiale, după încălzire urmată de răcirea corespunzătoare; să aibă stabilitate mare la temperaturi ridicate; să aibă propretăți mecanice ridicate; să se prelucreze ușor și să asigure o cuplare lină. Materialele metalo-plastice sau metalo-ceramice se obțin din pulberi metalice prin sinterizare având în compoziție cupru, plumb, siliciu, grafit. Fixarea garniturilor de frecare pe discul de oțel se face prin nituire sau lipire. Pentru a proteja garniturile de frecare împotriva încălzirii exagerate, pe suprafața lor se prevăd o serie de canale radiale, prin care, la rotirea ambreiajului, circulă aerul ce răcește suprafețele de frecare și ajută la evacuarea particulelor rezultate din uzare.
Niturile de fixare a garniturilor sunt de tipul cu cap înecat, cu tijă plină sau tubulară, confecționate din material metalic moale (aluminiu, cupru, oțel moale), astfel ca la uzura garniturilor, acestea să nu provoace uzuri ale suprafeței volantului sau a discurilor de presiune.
Amortizorul pentru oscilații de torsiune este un cuplaj elastic care are rolul de a atenua oscilațiile de torsiune ce apar datorită rotației neuniforme a arborelui cotit și a variațiilor bruște ale vitezelor unghiulare la deplasarea automobilului și la asigurarea unei cuplări line a ambreiajului. În figura 3.24 este prezentată varianta de disc condus cu arcuri elicoidale și inele de frecare, care este alcătuit din: discul suport 2, butucul cu flanșă 6 și discul suplimentar de închidere 9 ale discului condus, între care sunt dispuse arcurile elicoidale 8 și inelele intermediare de fricțiune 4,7.
1 3
1
2
3
13
13

AMBREIAJUL
20
Când ambreiajul este decuplat, ferestrele din discul 2 și flanșa butucului 6 coincid (figura 3.24.a). În momentul în care începe cuplarea, momentul motor se transmite de la disc la flanșa butucului prin arcurile 8. Sub acțiunea acestui moment, arcurile se comprimă, iar discul 2 se deplasează față de flanșa 6 a butucului (figura 3.24.b).
a) b) Figura 3.24
2-discul suport; 4 și 7-inele intermediar de frecare; 6-butuc cu flanșă; 9-discul suplimentar de închidere
Discul suport 2 este fixat de discul suplimentar de închidere 9 cu ajutorul unor nituri de distanțare 5. Flanșa butucului canelat 6 se află între discurile 3 și 9 și se poate roti în raport cu acestea, deoarece orificiile flanșei prin care trec niturile 5 sunt mai mari decât acestea.
Momentul de la discurile 3,9 se transmite la butucul 6 prin arcurile 8 așezate în ferestrele tăiate în flanșa butucului 6 și în discurile 3 și 9. Pentru amortizarea oscilațiilor unghiulare, între discurile 3,9 și flanșa butucului 6, se introduc inelele intermediare de frecare 4 și 7. În alte situații, în locul garniturilor 4 și 7 se introduc inelele de oțel arc, curbate, care la strângerea prin nituire creează o forță necesară obținerii unui moment de frecare.
a) b) c) d) Figura 3.25
2-discul suport; 4-cauciuc vulcanizat; 6-arcuri elicoidale; 7-arcuri lamelare; 8-nit; 9-disc de închidere.
2
4 6
5
7
9
5 9
8
2
4 8
2
4
5
2
4
5
8
3,9
8
4,7 6 2

AMBREIAJUL
21
În figurile 3.25 b,c,d, sunt prezentate trei variante constructive de amortizoare pentru oscilațiile de torsiune la care elementul elastic este din cauciuc. Între butucul canelat cu flanșă 5 și discul suport 2 se introduce cauciucul vulcanizat 4. Prezintă dezavantajele că pentru a obține o amortizare eficientă, dimensiunile elementelor din cauciuc trebuie să fie mari, ceea ce face ca momentul de inerție al discului de fricțiune să crească, iar regimul termic ridicat din zona centrală a discului influențează negativ asupra proprietăților fizice și asupra duratei de funcționare a cauciucului. În figura 3.26 este prezentat un ambreiaj cu amortizoare hidraulice.
Figura 3.26 2-discul condus; 4-elementul plonjor; 5-butucul; 6-arcuri elicoidale; 7-cilindrul
hidraulic.
Toate elementele componente ale amortizorului sunt amplasate în camera acestuia, care este închisă ermetic și umplută cu ulei mineral. Discul condus 2 este legat de butucul 5 prin intermediul arcurilor 6. Fiecare arc se sprijină cu un capăt pe cilindrul hidraulic 7, iar cu celălalt capăt pe elementul plonjor 4. Când discul 2 se rotește în raport cu butucul 5, elementul plonjor 4 se deplasează în cilindrul 7, mărind presiunea uleiului și făcându-l să treacă din cilindru în cameră prin orificiul cilindrului. Energia oscilațiilor este absorbită de frecarea lichidului la trecerea prin orificiu.
Datorită complicațiilor constructive, a momentului de inerție relativ mare și a dificultăților în realizarea unei etanșări corespunzătoare, acest amortizor se utilizează rar și numai la autoturisme.
Discul condus fără elemente elastice suplimentare și fără amortizoare pentru oscilațiile de torsiune.
Discul condus fără elemente elastice suplimentare și fără amortizoare pentru oscilațiile de torsiune este prezentat în figura 3.27.
7
6
2
4
5
Orificiu
Camera amortizorului

AMBREIAJUL
22
Caracteristic pentru acest ambreiaj simplu este faptul că legătura dintre discul suport și butucul cu flanșă se realizează prin nituire directă.
Figura 3.27
3.3.4. Pârghiile de decuplare Pârghiile de decuplare au rolul de a realiza mișcarea axială a discului de presiune în cazul cuplării sau decuplării ambreiajului. Montarea pârghiilor de decuplare între carcasa ambreiajului și discul de presiune se realizează printr-o articulație flotantă.
Figura 3.28 În figura 3.28,a rola 44 se rotește în jurul axului 43, permițând articulației discului de presiune 7, 27 să se deplaseze după o linie dreaptă. Prin articulația 43, 44 pârghia de decuplare este fixată de carcasă. Jocul δ dintre pârghia de decuplare și rulmentul de presiune se obține prin înșurubarea sau deșurubarea dispozitivului de reglare 45. În cazul construcței din figura 3.28.b, jocul δ se asigură prin înșurubarea sau deșurubarea piuliței 47.
Fixarea pârghiilor și menținerea jocului δ la construcția din figura 3.29,a se asigură prin arcurile 50 și 52. Reglarea jocului se obține prin înșurubarea sau deșurubarea piuliței flotante 51, apropiind sau depărtând talpa pârghiei 8 de rulmentul de presiune.
49 48
46
47
8
5
9
8
44 43
7
27 5
13 11 45
6
b) a)
4 10 6 11 2 1

AMBREIAJUL
23
La construcția din figura 3.29,b capătul exterior al pârghiilor de decuplare 8 se sprijină pe placa 53 și oscilează pe reazemul 54.
Jocul δ se asigură de arcul 55 fixat în carcasa ambreiajului, reglajul făcându-se prin înșurubarea sau deșurubarea piuliței 56.
Figura 3.29 Pârghiile de decuplare rigide se execută din oțel carbon, se călesc în ulei și se cianurează la o adâncime de 0,2mm pe suprafețele de lucru. Pârghiile de decuplare elastice se execută din oțel cu conținut ridicat de carbon și se călesc în ulei. După procedeul tehnologic de obținere, pârghiile de decuplare pot fi forjate sau matrițate.
3.3.5. Manșonul de decuplare
Acționarea pârghiilor de decuplare de către sistemul de acționare al ambreiajului se face prin intermediul manșonului de decuplare. Manșoanele de decuplare pot fi constituite în așa fel încât să se deplaseze direct pe arborele ambreiajului (acestea sunt supuse unei uzuri intense în tot timpul funcționării motorului) sau să se deplaseze pe o bucșă fixată pe carcasa ambreiajului (acestea au o uzură mai mică, numai în timpul cuplării și decuplării ambreiajului).
Figura 3.30 În figurile 3.30, 3.31 sunt prezentate câteva soluții constructive de
manşoane de decuplare.
8
52
51
50
6
5
a)
8
55
54 53
5
56
b)
11 11 11
25 13 13 13
12 12 12
c) b) a)

AMBREIAJUL
24
Astfel, în figura 3.30,a avem un manșon de decuplare cu rulment axial cu bile 11, în figura 3.30,b cu rulment radial-axial cu bile 11, iar în figura 3.30,c cu
inele de grafit 11. Acest din urmă caz se utilizează în special la autoturisme.
Figura 3.31 În figura 3.31 sunt prezentate două variante de manșone de cuplare având
rulmenţi radiali-axiali cu bile la care manșonul culisează pe bucșa 13, concentrică cu arborele ambreiajului și fixată în carterul ambreiajului.
Partea rotitoare (inelul interior al rulmentului) acționează direct asupra pârghiilor de decuplare sau asupra lamelelor radiale ale arcurilor centrale tip diafragmă. Rulmenții manșoanelor se realizează de regulă în construcție capsulată (carcasă metalică sau de poliamidă, în interiorul căreia se introduce la montare lubrifiantul adecvat).
3.4. Mecanismul de acționare a ambreiajului
3.4.1. Condiții impuse și clasificarea mecanismelor de acționare
Mecansimul de acționare al ambreiajului se folosește pentru cuplarea și decuplarea ambreiajului și trebuie să îndeplinească următoarele condiții:
- să asigure o cuplare perfectă; - să asigure o decuplare completă și rapidă;
- forța necesară decuplării să aibă valori reduse (să nu depășească 100...250 N, la o cursă a pedalei de 100...180 mm) diferențiat, în funcție de tipul autovehiculului;
- să permită reglare ușoară; - să ofere siguranță în funcționare. După principiul de funcționare, mecanismele de acționare a ambreiajelor
pot fi: - mecanisme de acționare neautomate:
- mecanic; - hidraulic.
- mecanisme de acționare automate: - vacumatice;
- electrice. În anumite cazuri, pentru uşurarea comenzii ambreiajului, se utilizează
mecanisme de acţionare neautomate prevăzute cu servomecanism.
12 12 13 13
11 11
b) a)

AMBREIAJUL
25
3.4.2. Mecanismul de acţionare mecanic
În cazul mecanismului de acţionare mecanic, forţa de la pedală se transmite la rulmentul de presiune prin intermediul unor pârghii şi tije, sau cablu. În figura 3.32 se prezintă diverse variante constructive de mecanisme de acţionare mecanice.
Figura 3.32 Tipuri constructive de mecanisme de acţionare mecanice:
1-pedală; 2-tije; 3-furcă cu manşon de decuplare; 4-rulment de presiune; 5-pârghie de debreiere.
Construcţia unui mecanism cu acţionare mecanică cu tije rigide este prezentat în figura 3.33.
Figura 3.33 1-pedala; 2- manşonul cu rulmentul de presiune; 3, 7, 8 arcuri de readucere; 4- furca de
acţionare a manşonului; 5-pârghii de debreiere; 6, 9-tije de acţionare; 10-pârghie. Apăsând pe pedala 1 cu forţa F
P, prin intermediul tijei 6 a pârghiei 10, a
tijei 9 (a cărei lungime se poate modifica) şi a furcii 4, se acţionează manşonul cu rulmentul de presiune 2. Manşonul de decuplare 2 acţionează asupra
5
4
3
2
7 6
1
9 8
δ
10

AMBREIAJUL
26
pârghiilor de debreiere 5, care fiind articulate de discul de presiune îl deplasează spre dreapta şi ambreiajul se decuplează. Readucerea manşonului în poziţia iniţială se realizează de arcul 3, iar a pedalei de acţionare de arcul 7. Reglarea cursei libere corespunzătoare jocului (δ=1,5...4 mm) se face prin modificarea lungimii tijei 9. În figura 3.34, este reprezentată spaţial comanda unui ambreiaj mecanic, asemănător celui redat anterior.
Figura 3.34 1-pedala ambreiajului; 2-axul 1; 3-arcul de readucere a pedalei; 4-lonjeronul şasiului; 5-tijă; 6-levierul de comandă; 7-axul 2; 8-pârghie; 9-tija furcii; 10-furcă; 11-manşonul cu rulmentul
de presiune; 12-pârghia de debreiere.
La acesta când se apasă pedala ambreiajului 1, mişcarea este transmisă la axului cu pârghie 2, de la care prin intermediul tijei 5, a levierului 6 şi a axului 7, mişcarea ajunge la pârghia 8. Pârghia 8, deplasează la rândul ei tija 9 şi totodată furca ambreiajului 10. Rotirea furcii provoacă deplasarea manşonului culisant cu rulmentul de presiune 11, care realizează decuplarea ambreiajului prin intermediul pârghiilor de debreiere 12. În figura 3.35 este prezentat un mecanism de acţionare cu cablu întâlnit la autoturismele DACIA, la care forţa de la pedală se transmite la furca manşonului prin intermediul unui cablu flexibil de oţel. La aceste mecanisme transmiterea forţei de acţionare se face numai prin tracţiune. Cablul flexibil este realizat din cablul inextensibil din oţel 2, care preia sarcina şi o îmbrăcăminte din fire de oţel înfăşurate în spirală (alternativ în două sensuri), îmbrăcate într-o manta din PVC (teaca incompresibilă) 5. O astfel de construcţie asigură rezistenţa la eforturile transversale dezvoltate de cablu în zonele de curbură şi împiedică pătrunderea apei şi prafului.

AMBREIAJUL
27
Aceasta este rezemată între planşeul 4 al automobilului şi suportul 8, prin intermediul ansamblului elastic 3 de o parte şi 6,7 de cealaltă parte. Reglarea cursei libere a pedalei se face cu ajutorul piuliţelor 11. La încetarea forţei de apăsare sub acţiunea arcului 12 sistemul revine în poziţia iniţială.
Figura 4.3 1-pedală; 2-cablul de oţel; 3-bucşă cu umăr de fixare în planşeu; 4-planşeu; 5-tub flexibil (teacă incompresibilă); 6 şi 7-ansamblul elastic; 8-suport; 9-pârghie furcă; 10-furcă; 11-
dispozitiv de reglaj (tijă filetată-piuliţă şi contrapiuliţă); 12-arc de revenire a pedalei.
Figura 3.36 1-pedala; 2-axul de fixare a pedalei; 3-cablul de oţel; 4-manşon filetat; 5-piulţă; 6-teacă
incompresibilă; 7-furca de acţionare a manşonului; 8-manşonul cu rulmentul de presiune; 9-arcul central tip diafragmă.

AMBREIAJUL
28
În figura 3.36 este prezentat mecanismul de acţionare a ambreiajului la autoturismele OLTCIT, la care forţa de la pedala 1, se transmite la furca de acţionare a manşonului 7, tot prin cablu flexibil. Reglajul cursei libere a pedalei se face prin intermediul manşonului filetat 4, care se poate deplasa prin înşurubare şi fixa la poziţia dorită cu ajutorul piuliţei 5. În figura 3.37 este prezentat mecanismul de acţionare a ambreiajului la autoturismele DAEWOO CIELO, în varianta de acţionare mecanică. Şi în acest caz mecanismul de acţionare este cu, cablu de tracțiune flexibil.
Figura 3.37 Reprezentarea schematică a acestor mecanisme este redată în figura 3.38.
Figura 3.38

AMBREIAJUL
29
3.4.3. Mecanismul cu acţionare hidraulică.
Ca principiu de funcţionare şi realizare constructivă aceste mecanisme sunt similare comenzilor hidraulice ale frânelor. În figura 3.39 este prezentată construcţia de ansamblu a unui mecanism de acţionare hidraulică a ambreiajelor.
Figura 3.39 1-pedala; 2-arc de readucere a pedalei; 3-tija; 4-pompa centrală; 5-rezervor; 6-conductă; 7-cilindrul receptor; 8-pistonul cu tijă; 9-arc; 10-furca de acţionare a manşonului; 11-suportul
sferic; 12-arc; 13-manşonul cu rulmentul de presiune.
La apăsarea pedalei 1, în cilindrul 4 al pompei centrale se deplasează un piston. Din cilindrul pompei centrale, prin intermediul conductei 6, fluidul este trimis în cilindrul receptor 7, în care se deplasează un piston ce acţionează prin tija 8 furca 9, producând decuplarea ambreiajului. La eliberarea pedalei, arcurile 2, 9 şi 12 readuc mecanismul în poziţia iniţială. În cazul ambreiajului cu mecanism de acţionare hidraulic, cursa liberă a pedalei se datoreşte jocului dintre tijă şi pistonul pompei centrale şi jocului dintre rulmentul de presiune şi capetele interioare ale pârghiilor de debreiere. Jocul dintre tija pistonului şi cilindrul principal este cuprins între 0,3...0,9mm şi se reglează cu ajutorul şurubului cu excentric, care fixează tija de pedală, iar jocul dintre rulmentul de presiune şi capetele interioare ale pârghiilor de debreiere se reglează prin modificarea tijei 8.
În figura 3.40 este prezentată o altă variantă constructivă de ambreiaj cu acţionare hidraulică a cărei construcţie şi funcţionare este asemănătoare celei prezentate anterior.

AMBREIAJUL
30
Figura 3.40 1-pedala; 2-corpul pompei (rezervor-cilindru); 3-garnitură; 4-pistonul pompei; 5-tijă; 6-
conductă; 7-pistonul cilindrului receptor; 8-cilindrul receptor; 9-tijă; 10-furca de acţionare a manşonului; 11-manşonul cu rulmentul de presiune; 12-pârghia de debreiere.
Reprezentarea schematică a mecanismelor de acţionare hidraulică este
prezentată în figura 3.41.
Figura 3.41 1-pedala; 2-tijă; 3-pompa centrală; 4-conductă; 5-cilindrul receptor; 6-furca de acţionare a
manşonului; 7-manşonul cu rulmentul de presiune; 8-pârghia de debreiere; 9-discul de presiune.

AMBREIAJUL
31
Construcţia pompei centrale este redată în figura 3.43.
Figura 3.43
1-inel de etanşare; 2-piston; 3-lamelă; 4-garnitură de etanşare; 5=cilindru; 6- arc; 7-armătură garnitură, 8 şi 19-orificii de comunicare; 9-inel opritor; 10-capac; 11-filtru;12-rezervor; 13-
racord; 14-pedală; 15-tijă piston; 16-manşon protector; 17-şaibă opritor; 18-inel de siguranţă.
Construcţia cilindrului receptor este dat în figura 3.44.
Figura 3.44 1-capac protector; 2-ventil pentru scos aerul; 3-tijă piston; 4-inel opritor; 5-manşon protector, 6-contrapiuliţă; 7-tijă filetată; 8-furcă ambreiaj; 9-cilindru receptor; 10-piston; 11-garnitură de
etanşare; 12-arc de readucere. Pompa centrală este fixată prin şuruburi, pe peretele din faţă al caroseriei,
iar cilindrul receptor este fixat tot prin şuruburi de carterul ambreiajului.

AMBREIAJUL
32
Mecanismul cu acţionare hidraulică prezintă faţă de cele mecanice, următoarele avantaje:
- limitează viteza de deplasare a discului de presiune la cuplarea ambreiajului şi prin aceasta încărcările transmisiei care apar la cuplarea bruscă;
- randament mai ridicat deoarece nu are în alcătuire aşa multe articulaţii; - posibilitatea amplasării în locul dorit fără complicaţii constructive
(pedala de acţionare poate fi dispusă departe de ambreiajul propriu-zis). Un alt avantaj important al acestor mecanisme este dat de efectul multiplicator obţinut prin adoptarea unui diametru, pentru cilindrul receptor, superior celui al pompei centrale.
Datorită amplasării cilindrului receptor pe carterul ambreiajului, vibraţiile grupului motopropulsor, generează fiabilitate redusă a acestuia. Pentru atenuarea acestui dezavantaj şi pentru mărirea durabilităţii rulmentului de presiune a fost promovată în ultimii ani, soluţia în care, cilindrul receptor este integrat manşonului de decuplare. Este suprimată astfel furca al cărui principal inconvenient este de transformare a mişcării de rotaţie (în jurul articulaţiei faţă de carter) în mişcare de translaţie a manşonului de decuplare. În figura 3.45 sunt prezentate două soluţii de astfel de cilindri, promovate de firma Sachs.
Figura 3.45 Cilindru receptor integrat manşonului de decuplare:
Poziţia "C", dispusă deasupra axei, corespunde stării cuplate a ambreiajului, iar poziţia "D", dispusă sub axă, corespunde stării debreiate a ambreiajului. Distanţa Sm corespunde cursei manşonului pentru decuplarea ambreiajului.
La soluţia din figura 3.45,a, deplasarea axială a rulmentului de presiune 1 este realizatã de pistonul 2 al cilindrului receptor 3 montat în bucşa 4. Accesul lichidului sub presiune se face prin racordul 5, etanşarea fiind asigurată de garnitura frontală cu autoetanşare 6. Menţinerea apăsării constante a rulmentului de presiune asupra pârghiilor se face de arcul de compresiune 7.
b a

AMBREIAJUL
33
La varianta din figura 3.45,b similară constructiv, rezultă o creştere a diametrului activ al cilindrului receptor, dar, prin deplasarea relativă a pistonului 1 faţă de cele două suprafeţe cilindrice concentrice ale bucşei 2, apar dificultăţi de etanşare.
3.4.4. Mecanismul de acţionare automată a ambreiajului
Pentru automatizarea comenzii ambreiajului trebuie să se respecte
următoarele condiţii: - la demararea automobilului trebuie să realizeze o cuplare mai lină decât
la schimbarea treptelor de viteze. Deschiderea clapetei de acceleraţie, în timpul cuplării ambreiajului trebuie să se facă astfel încât momentul dezvoltat de motor să depăşească momentul rezistent, care se opune deplasării automobilului, redus la arborele primar al schimbătorului de viteze. Deci, procesul deschiderii clapetei de acceleraţie trebuie să varieze odată cu schimbarea condiţiilor de demarare.
- la trecerea de la o treaptă de viteză inferioară la o treaptă superioară, ambreiajul trebuie să se cupleze mult mai rapid decât la demararea automobilului.
- în cazul schimbării de la o treaptă de viteze superioară la una inferioară, în cazul schimbătorului de viteze fără sincronizatoare, înainte de cuplarea ambreiajului este necesară deschiderea bruscă a clapetei de acceleraţie pentru a mări turaţia motorului până la aproximativ 1000 rot/min. După aceea cuplarea ambreiajului trebuie să se realizeze la fel ca în cazul trecerii de la o treaptă inferioară la una superioară.
- automatizarea comenzii ambreiajului nu trebuie să împiedice posibilitatea de frânare a automobilului cu motorul.
De cele mai multe ori se prevede posibilitatea menţinerii acţionãrii directe folosite în anumite condiţii de expoatare, precum şi la defectarea acţionãrii automate.
După tipul energiei utilizate, sistemul de automatizare al comenzii ambreiajului poate fi: cu depresiune; hidraulic; electromagnetic.
În figura 3.46 se prezintă sistemul de automatizare al comenzii ambreiajului folosind depresiunea din colectorul de admisie al motorului.
La acţionarea manetei pentru schimbarea treptelor de viteze, se închide contactul 8 al releului 9 care deschide supapa 6 şi se realizează legătura rezervorului vacumatic 7 cu servomecanismul 1.
Membrana servomecanismului deplasându-se sub acţiunea diferenţei de presiune, acţionează asupra furcii ambreiajului producând decuplarea lui.
După schimbarea treptei contactul 8 se întrerupe, iar releul 9 nu mai acţionează şi supapa 6 închide camera I şi pune servomecanismul 1, în legătură cu camerele II şi III. În felul acesta, la partea inferioară a membranei presiunea creşte datorită faptului că aerul atmosferic, trecând prin filtrul 3, pătrunde în camera III prin orificiul 4 sau supapa 5 iar mai departe în camera II, ajungând la servomecanismul 1.
În această situaţie membrana servomecanismului revine în poziţia iniţială realizând cuplarea ambreiajului.

AMBREIAJUL
34
Figura 3.40 1-servomecanism; 2-membrană; 3-filtru; 4-orificiu; 5, 6 şi 10-supape; 7-rezervorul vacumatic;
8,11 şi 14-contacte; 9, 12 şi 13-relee.
Dacă după schimbarea treptei de viteză motorul se accelerează, cuplarea ambreiajului trebuie să se realizeze mai rapid.
Acest lucru este posibil datorită faptului că la accelerare, depresiunea din partea stângă a membranei 2 se reduce mult, iar arcul ei o deplasează spre dreapta şi cu ajutorul unei tije deschide supapa 5. În felul acesta aerul atmosferic intră în camera III atât prin orificiul 4 cât şi prin supapa 5, iar presiunea din servomecanismul 1 scade brusc şi cuplarea ambreiajului se face mult mai rapid. În cazul în care nu se accelerează imediat după schimbarea treptei de viteză, aerul atmosferic pătrunde iniţial atât în orificiul 4 cât şi prin supapa 5, care se deschide datorită diferenţei mari de presiune pe feţele ei. După scăderea diferenţei de presiune supapa 5 se închide, sub acţiunea arcului ei, iar aerul pătrunde în continuare numai prin orificiul 4. În felul acesta rezultând o cuplare lină a ambreiajului. Dacă ambreiajul este decuplat, iar roţile motoare devin elementul conducător în transmisie, atunci momentul reactiv al punţii din spate închide contactul 11 al releului 13, iar acesta, la rândul său închide circuitul releului 12. Sub acţiunea releului 12 membrana 2 este deplasată spre stânga, indiferent de depresiunea din colectorul de admisie şi cuplarea ambreiajului se realizează progresiv. Contactul 14 permite să se închidă circuitul releului 13 numai când ambreiajul se află în poziţia decuplat. Supapa 10 asigură depresiunea în rezervorul 7, deschizându-se atunci când depresiunea în rezervor este mai mică decât cea din colectorul de admisie.

AMBREIAJUL
35
3.5. Calculul ambreiajelor mecanice
Calculul ambreiajelor se face cu scopul stabilirii elementelor principale ale acestuia, în raport cu valoarea maximă a momentului motor, în funcţie de tipul şi destinaţia automobilului şi de verificarea la rezistenţă a principalelor piese componente. Calculul unui ambreiaj cuprinde în principal:
- determinarea parametrilor principali ai ambreiajului; - calculul momentului de frecare al ambreiajului Ma; - calculul forţei de apăsare asupra discurilor Fa; - calculul dimensiunilor garniturilor de frecare; - calculul arcurilor de presiune; - calculul părţilor conducătoare şi conduse ale ambreiajului; - calculul mecanismului de acţionare.
3.5.1. Determinarea parametrilor principali ai ambreiajului
Parametrii principali, care caracterizează construcţia ambreiajului sunt: coeficientul de siguranţă β , momentul de calcul Mc; presiunea specifică ps; lucrul mecanic specific de patinare ls şi creşterea temperaturii pieselor în timpul de funcţionării ∆t.
Coeficientul de siguranţă al ambreiajului (ß) Pentru transmiterea de către ambreiaje a momentului maxim al motorului
fără patinare, pe toată durata de funcţionare (chiar şi după uzarea garniturilor de frecare) este necesar ca momentul de frecare Ma al ambreiajului să fie mai mare dec`ât momentul maxim al motorului Mmax . În acest scop se introduce în calcul un coeficient de siguranţă β , care ia în considerare acest lucru şi care poate fi definit ca valoare, de raportul dintre momentul de calcul al ambreiajului Ma şi
momentul maxim al motorului Mmax: maxM
M a=β >1, de unde se obţine valoarea
momentului necesar al ambreiajului (momentul de calcul) dat de relaţia: maxMMM ac ⋅== β (3.32)
La stabilirea valorii coeficientului de siguranţă se utilizează date statistice care iau în considerare tipul şi condiţiile constructive ale ambreiajului .
Dacă valoarea coeficientului de siguranţă este mare rezultă următoarele avantaje :
- nu apare pericolul patinării în cazul uzurii garniturilor de frecare; - se micşorează lucrul mecanic de patinare; - se măreşte durata de funcţionare a ambreiajului; - se reduce timpul de patinare, ceea ce duce la îmbunătăţirea acceleraţiilor
şi reducerea uzurilor.

AMBREIAJUL
36
Pe lângă aceste avantaje prezintă şi dezavantaje: - se măreşte forţa la pedala ambreiajului; - cresc suprasarcinile în transmisia automobilului şi ambreiajul nu mai
constituie un element de siguranţă la suprasolicitări. Un ambreiaj cu coeficient de siguranţă mic prezintă avantajul obţinerii
unui ambreiaj compact cu acţionare uşoară şi preţ de cost mai scăzut, dar prezintă şi următoarele dezavantaje:
- se măreşte tendinţa de patinare; - creşte lucru mecanic de frecare la patinare şi implicit uzura garniturilor
de frecare. Luânâd în consideraţie aceste constatări contradictorii, se recomandă ca
valoarea coeficientului β să fie adoptată în următoarele limite : Pentru ambreiajele simple : - 75,1....2,1=β pentru autoturisme de capacitate normală; - 0,2....6,1=β pentru autoturisme de capacitate mare, autocamioane şi
autobuze normale; - 5,2....0,2=β , pentru autovehicule care lucrează în condiţii grele; - 0,4....0,3=β pentru autoturisme de competiţii sportive.
Valorile spre limita superioară se recomandă pentru cazul ambreiajelor cu arcuri elicoidale dispuse periferic, la care reducerea forţei elastice este direct proporţională cu uzura garniturilor iar valorile spre limita inferioară se recomandă pentru ambreiajele cu arcuri centrale tip diafragmă, la care forţa arcurilor este puţin influenţată de modificarea săgeţii de precomprimare a arcurilor în cazul uzurii garniturilor de fricţiune.
Pentru ambreiaje semicentrifugale se ia în consideraţie faptul că momentul de frecare creşte odată cu mărirea turaţiei motorului şi coeficientul de siguranţă β se adoptă la valori mai mici 3,1....1,1=β . La ambreiajele cu mai multe discuri se recomandă ca valorile coeficientului de siguranţă să se majoreze 15 ... 20 % faţă de valorile recomandate pentru ambreiajele monodisc. Determinarea presiunii specifice dintre suprafeţe Presiunea specifică dintre suprafeţele de frecare ale ambreiajului se defineşte ca fiind raportul dintre forţa dezvoltată de arcurile (arcul) de presiune (F) şi aria unei suprafeţe de frecare (A) cu relaţia:
A
Fp =0 [MPa] (3.33)
Valoarea maximă a presiunii specifice este limitată prin tensiunea admisibilă de strivire a materialului din care se execută garniturile. Faţă de această limită fizică, în adoptarea valorii de predimensionare a ambreiajului sunt de considerat următoarele aspecte:

AMBREIAJUL
37
- valorile spre limita tensiunii admisibile de strivire favorizează reducerea dimensiunilor constructive, în sensul că discurile conduse au creşteri radiale mici, cu momente reduse de inerţie; - valorile mici ale presiunii specifice implică supafeţe mari de frecare, care presupun creşteri radiale însemnate ale discurilor conduse şi deci, mărirea garniturilor, a maselor şi momentelor de inerţie ale părţii conduse a ambreiajului. În plus, prin creşterea razelor, cresc vitezele tangenţiale de alunecare dintre suprafeţele de contact la cuplarea ambreiajului, şi deci a uzurii garniturilor. În cazul garniturilor care au ca element de bază azbestul presiunea specifică poate varia între (0,17...0,35) [MPa] iar pentru garnituri din răşini sintetice impregnate cu fibre de kevlar sau cu fibre de sticlă (0,2...0,5) [MPa]. Valorile mai reduse se recomandă pentru ambreiaje al căror diametru exterior De depăşeşte 300 mm (viteza de patinare la periferie este foarte mare). La ambreiajele la care coeficientul de siguranţă β are valori mari, presiunea specifică se ia la valori mari. În cazul garniturilor din materiale metaloceramice presiunea specifică se admite până la 1,5..2,0 [MPa]
Determinarea lucrului mecanic specific de patinare Pentru aprecierea uzurii garniturilor de frecare se foloseşte ca parametru lucrul mecanic specific de patinare (de frecare ) dat de relaţia :
Ai
LLS ⋅
= [daN/cm2] (3.34)
unde: A - suprafaţa unei garnituri de frecare; i - numărul de perechi de suprafeţe de frecare; L - este lucrul mecanic de frecare la patinare în cazul pornirii din loc
(cazul cel mai defavorabil de solicitare al ambreiajului). Se calculează cu relaţia
⋅⋅+
⋅+⋅⋅
⋅⋅⋅⋅
=30
2
3
2
360030
2
20
2
2 n
g
G
KG
K
Gn
g
G
ii
rnL a
aao
s
r πψψππ , (3.35)
în care: n - turaţia motorului la pornire (se consideră 500 .. 600 rot/min); rr - raza de rulare a roţii; i0 - raportul de transmitere al transmisiei principale; is - raportul de transmitere al schimbătorului de viteze; ψ - coeficientul rezistenţei specifice a drumului: α+α=ψ sincosf ; Ga - greutatea totală a automobilului ădaNş; K - coeficientul care arată gradul de creştere a momentului de frecare în
timpul cuplării: K=30...50 [daNm/s] pentru autoturisme; K=50...150 [daNm/s] pentru autocamioane şi autobuze;
g - acceleraţia gravitaţională g = 9,8 [m/s2]; care introdus în relaţia (3.34) rezultă :

AMBREIAJUL
38
⋅⋅+
⋅+⋅⋅
⋅⋅⋅⋅⋅⋅
=30
2
3
2
360030
2
20
2
2 n
g
G
KG
K
Gn
g
G
iiAi
rnL a
aaa
s
rs
πψψππ (3.36)
Un ambreiaj este considerat satisfăcător din punct de vedere al rezistenţei la uzare dacă : LS = (100…120) Nm/cm2, pentru autoturisme; LS = (15…25) Nm/cm2, pentru autocamioane până la 5kN; LS = (40…60) Nm/cm2, pentru autobuze şi autocamioane de peste 5kN. Pentru calculul aproximativ se foloseşte relaţia:
22
1
2
3,357os
ra
ii
rGL
⋅⋅⋅= (3.37)
În cazul utilizării pentru calculul lucrului mecanic specific a relaţiei (3.37), acesta nu trebuie să depăşească 0,75 daNm/cm2. Creşterea temperaturii pieselor ambreiajului Aprecierea şi comportarea ambreiajelor din punctul de vedere al încălzirii, se face prin cunoaşterea creşterii temperaturii pieselor ambreiajului în timpul patinării ambreiajului. Se determină cu relaţia:
pmc
Lt
⋅⋅⋅=∆
427
α , (3.38)
sau cu relaţia: pmc
Lt
⋅⋅=∆ α (3.39)
în care: α - coeficientul ce exprimă partea din lucrul mecanic de frecare L consumată pentru încălzirea piesei care se verifică: 5,0=α - pentru discul de presiune şi volantul ambreiajelor monodisc; 25,0=α - pentru discul de presiune volanta ambreiajelor bidisc; 5,0=α - pentru discul intern al ambreiajelor bidisc.
L - este lucrul mecanic de frecare la patinare în cazul pornirii din loc (cazul cel mai defavorabil de solicitare al ambreiajului), determinat cu una din relaţiile (3.38) sau (3.39).
c - căldura specifică a piesei ce se verifică, pentru oţel şi fontă c=0,115 Kcal/kg OC, când se foloseşte relaţia (3.38);
c - căldura specifică a piesei ce se verifică, pentru oţel şi fontă c=500 J/kg oC, când se foloseşte relaţia (3.39);
mp- greutatea piesei ce se verifică ădaNş. În cazul ambreiajelor monodisc se verifică discul de presiune, iar în cazul ambreiajului bidisc se verifică discul de presiune şi discul intermediar conducător. Ambreiajul se consideră bun din punct de vedere al încălzirii dacă creşterea de temperatură la pornirea din loc este cuprinsă între limitele
15...8=∆t 0C.

AMBREIAJUL
39
3.5.2. Calculul momentului de frecare al ambreiajului
În figura 3.47 este prezentată schema unui ambreiaj la care cele două suprafeţe de frecare se află sub acţiunea forţei de apăsare axiale F.
Considerând pe suprafaţa de frecare un element de arie dA, de dimensiuni ρd şi ϕd , aflat la distanţa ρ de centru, forţa normală elementară este dată de
relaţia: ϕ⋅ρ⋅ρ⋅=⋅= ddpdApdF (3.40) în care:
p - este presiunea specifică .
Figura 3.47 1- volantul; 2- garniturile de fricţiune; 3- discul suport al garniturilor; 4- discul de
presiune; 5- arborele ambreiajului. Momentul de frecare elementar este dat de relaţia :
ϕ⋅ρ⋅⋅ρ⋅µ=⋅ρ⋅µ= ddpdFdMa 2 (3.41) Pentru calculul ambreiajului, coeficientul de frecare este: 30,0...25,0=µ Momentul de frecare total se obţine prin integrarea relaţiei (3.41) în care
µ şi p se consideră constante.
( )3322
0 3
2ie
R
RRRpddpMa
e
i
−⋅⋅=⋅= ∫∫ µπρρϕµπ
(3.42)
unde: Re - raza exterioară a garniturilor Ri - raza interioară a garniturilor .
Dacă forţa de apăsare este uniform distribuită pe suprafeţele de frecare presiunea p va fi dată de relaţia :
( )22ie RR
Fp
−π= (3.43)
Înlocuind în relaţia (3.42) rezultă :
( )( )22
33
3
2
ie
iea RR
RRFM
−−⋅⋅= µ (3.44)
La un ambreiaj prevăzut cu mai multe perechi de suprafeţe de frecare momentul de frecare este dat de relaţia :
( )( )22
33
3
2
ie
iea RR
RRFiM
−−⋅⋅⋅= µ (3.45)
în care:
ρ
∆ρ
∆A
∆Φ
Re
Ri
5
4 3
2
1
F
F
Rm

AMBREIAJUL
40
i = numărul de perechi de suprafeţe de frecare, care se determină cu relaţia: i = 2nd, (3.46) unde: nd - numărul discurilor conduse ale ambreiajului. Știind că raza medie a garniturilor este dată de relaţia:
( )( )22
33
3
2
ie
iem
RR
RRR
−−
= (3.47)
rezultă: RmFiM a ⋅⋅⋅= µ (3.48) Observaţie: în practică raza medie se poate determina şi cu relaţia:
2
iem
RRR
+= rezultând o eroare de calcul, de 1..4 %
3.5.3. Calculul forţei de apăsare asupra discurilor Forţa de apăsare asupra discurilor ambreiajului se determină din condiţia ca momentul de frecare al ambreiajului Ma să fie egal cu momentul de calcul Mc Ma = Mc (3.49) rezultă: maxMRFi m ⋅=⋅⋅⋅ βµ (3.50)
mRi
MF
⋅⋅µ⋅β
= max (3.51)
Luând în consideraţie pierderile prin frecare în elementele de ghidare ale discului de presiune şi în canelurile discului condus forţa se poate exprima astfel: af FcF ⋅= (3.52)
în care : Fa - forţa de apăsare a arcurilor de presiune; cf - coeficientul ce ţine seamă de pierderile prin frecare;
95,0...90,0=fc pentru ambreiajele monodisc;
85,0...80,0=fc pentru ambreiajele bidisc.
Dacă ambreiajul este prevăzut cu mai multe arcuri de presiune dispuse periferic forţa de apăsare a arcurilor este dată de relaţia: /
aaa FnF ⋅= (3.53) în care:
na - numărul de arcuri periferice; Fa
/- forţa dezvoltată de un arc. În cazul ambreiajelor cu arc central forţa de apăsare a arcului se determină cu relaţia : ca FiF ⋅= (3.54) în care:
i - raportul de multiplicare al pârghiilor lamelare; Fc - forţa dezvoltată de arcul central.

AMBREIAJUL
41
În cazul ambreiajului semicentrifugal forţa de apăsare asupra discurilor este dată de forţa de apăsare a arcurilor şi de forţa centrifugă a contragreutăţilor. ( ) fca cFFnF ⋅′+⋅= /
0 (3.55)
Fc/ - forţa centrifugă dezvoltată de toate contra greutăţile pârghiilor de
debreiere . Dacă ambreiajul este prevăzut cu arcuri pentru realizarea debreierii complete (îndepărtează discul de presiune de discul condus) forţa de apăsare asupra discurilor va fi :
raf FFcF −= (3.56)
în care : Fr - forţa dezvoltată de arcurile de debreiere .
Cunoscând forţa de apăsare totală forţa de debreiere Fr şi coeficientul cf se determină forţa de apăsare a arcurilor, cu relaţia:
f
rm
f
ra c
FRi
M
c
FFF
+⋅⋅
⋅
=+= µβ max
(3.57)
3.5.4. Calculul dimensiunilor garniturilor de frecare
Din figura 3.48 se observă că garniturile de frecare 2, care intră în alcătuirea discului condus realizează cuplarea părţii conducătoare cu cea condusă a ambreiajului (prin forţa de frecare, creată de forţa de apăsare F). Deci, suprafeţele de frecare ale ambreiajului reprezintă căile de legătură dintre părţile conducătoare ale acestuia şi este necesară dimensionarea lor.
Figura 3.48
Suprafaţa garniturilor de frecare se poate determina cu relaţia: maxMA ⋅= λ (3.58) în care :
Re
Ri
Di
De
5
4 3
2
1
F
F Rm
g

AMBREIAJUL
42
λ - este un coeficient ce depinde de tipul automobilului şi a ambreiajului şi este dat în tabelul 3.1. Tabelul 3.1
Tipul automobilului
Tipul ambreiajului Coeficientul λ
[cm2/daNm] Autoturisme Monodisc 25-30
Autocamioane Monodisc 35-40 Autobuze Bidisc 40-45
De asemenea, suprafaţa garniturilor se poate determina şi cu relaţia: ( ) ( )2222 1 cRiRRA eie −π=⋅−π= [cm2] (3.59)
în care:
c - raportul dintre raza interioară şi raza exterioară: e
i
R
Rc = , care pentru
automobile este c = 0,53..0,75; i = 2nd - numărul perechilor suprafeţelor de frecare. Ținând seama că uzura garniturilor este mai accentuată la periferie decât
spre centru, din cauza vitezei de alunecare diferite, se recomandă ca limita superioară a coeficientului c să se adopte în cazul automobilelor echipate cu motoare de turaţie ridicată.
Egalând relaţiile (3.58) şi (3.59) obţinem:
( ) ( ) ic
MRicRM ee ⋅−⋅
⋅=⇒−=⋅ 2max22
max 11
πλπλ (3.60)
Cunoscând Re şi c, se determină raza interioară, cu relaţia:
ei RcR ⋅= (3.61) şi raza medie cu relaţia:
22
33
3
2
ie
iem
RR
RRR
−−
= (3.62)
Determinarea razei exterioare a garniturilor de frecare se mai poate face şi pornind de la relaţia:
mRFMc ⋅⋅⋅= iµ (3.63) în care:
F- este forţa normală care acţionează asupra garniturilor de frecare şi care se determină cu relaţia: ApF o ⋅=
A-aria unei suprafeţe a garniturii de fricţiune, care se determină cu relaţia: ( )22
ie RRA −⋅= π
Rm- raza medie a garniturilor, care se determină cu relaţia:2
iem
RRR
+=
Înlocuind în relaţia (3.63) rezultă:
( )
−⋅⋅
+⋅⋅⋅=−⋅⋅
+⋅⋅⋅=⋅=
2
2322 1
2
1
2 e
ie
i
eoieie
omc R
RR
R
RpiRRRR
piMM πµπµβ ,
în care am notat:

AMBREIAJUL
43
cR
R
e
i = - raportul razelor.
Rezultă: ( )23 12
1c
cRpiM eom −⋅⋅+⋅⋅⋅=⋅ πµβ
De unde putem determina dimensiunea razei exterioare Re:
( ) ( )32 11
2
ccpi
MR
o
me +⋅−⋅⋅⋅⋅
⋅⋅=
πµβ
(3.64)
în care: p0-este presiunea admisibilă la strivire.
La ambreiajele moderne, diametrul exterior maxim al garniturilor de frecare nu depăşeşte, în general: mm 380max ≤eD
Dimensiunile garniturilor sunt standardizate prin STAS 7793-83 şi sunt redate în tabelul 3.2. Tabelul 3.2
De 150 160 180 200 225 250 280 300 305 310 325 350 380 400 420
Di 100 110 125 130 150 150 155
165 165 165 175 185 195 200 220 220
gGrosimea
2,5 3,5
2,5 3,5
3,5 3,5 3,5 3,5 3,5 3,5 3,5 4,6 4,6 4,6 4,6 5,6 5,6
Calculul de verificare a garniturilor
Calculul de verificare a garniturilor de frecare se face pentru următoarele solicitări:
- la presiune de contact; - la uzură;
a) Calculul de verificare la presiunea de contact. Se face cu relaţia:
( ) 022max4
pRDDi
M
A
Fp
mie
≤⋅−⋅µ⋅π
⋅β⋅== (3.65)
care: - pentru garniturile de azbest poate lua valorii între p0=(15...0,35) [MPa]; - pentru garnituri din răşini sintetice impregnate cu fibre de kevlar sau cu fibre de sticlă poate lua valorii între p0=(0,2...0,5) [MPa]. - pentru garniturile metaloceramice pres. specifică poate lua valori p0=(1,5...2,0) [MPa].
b) Calculul de verificare la uzare Verificarea la uzare a garniturilor se face prin compararea parametrului
lucru mecanic specific cu valoarea maxim admisă. Lucrul specific de frecare este dat de relaţia:
Ai
LlS ⋅
= [daNm/cm2] (3.66)
În care lucrul mecanic de patinare la pornirea de pe loc L, se determină cu una din relaţiile (3.35) sau (3.37).
Valoarea maximă admisă a lucrului specific de patinare ls, dată în literatură de specialitate este:

AMBREIAJUL
44
2m/cmN 120100 ⋅÷=Sl pentru autoturisme; 2m/cmN 2515 ⋅÷=Sl pentru autocamioane până la 5 kN; 2m/cmN 6040 ⋅÷=Sl pentru autocamioane şi autobuze peste 5 kN. 3.5.5. Calculul arcurilor de presiune Menţinerea stării cuplate a ambreiajului la limita momentului necesar al ambreiajului proiectat este posibilă când pe suprafaţa de frecare se dezvoltă forţa normală F dată de relaţia:
mRi
MF
⋅⋅⋅=
µβ max (3.67)
Pentru realizarea acestei forţe în construcţia ambreiajelor se utilizează arcurile de presiune dispuse periferic aproximativ pe raza medie a garniturilor şi arcurile centrale tip diafragmă cu tăieturi după generatoare.
a. Calculul arcurilor periferice Aceste arcuri sunt în general arcuri cilindrice executate din sârmă trasă şi
au caracteristică liniară . Calculul acestor arcuri constă în determinarea următoarelor elemente :
- diametrul sârmei; - diametrul de înfăşurare al sârmei; - numărul de spire; - lungimea arcului în stare liberă.
Determinarea diametrului sârmei Cunoscând forţa totală F pe care trebuie să o dezvolte arcurile periferice şi
alegând numărul de arcuri na se poate determina forţa Fa pe care trebuie să o dezvolte un arc, cu relaţia :
aa n
FF =′ (3.68)
Tabelul 3.3 Diametrul exterior al
garniturilor de frecare De [mm]
Până la 200 280 - 380 280 - 380 380…450
Numărul arcurilor de presiune 3..6 9...12 12...18 18...30
Numărul arcurilor se alege astfel încât forţa Fa- dată de un arc să se încadreze între 8040÷ daN la automobilele obişnuite iar în cazul autocamioanelor grele poate până la 100 daN. În general, numărul arcurilor de presiune periferice se adoptă în funcţie de diametrul exterior al garniturilor de frecare conform tabelului 3.3. Calculul arcurilor de presiune se face pentru ambreiajul decuplat când fiecare arc dezvoltă forţa Fa
//.

AMBREIAJUL
45
Pentru a rezulta un ambreiaj care poate fi manevrat fără dificultate se recomandă ca la decuplare creşterea forţei să nu depăşească cu 15...25 % valoarea iniţială. În felul acesta între Fa
/ şi Fa// există următoarea relaţie de
legătură: ( ) aa FF ′=′′ 25,1...15,1 (3.69) Arcurile periferice sunt solicitate la torsiune şi rezultă că efortul unitar de torsiune se calculează cu relaţia:
3
8
d
DFk at ⋅
⋅′′⋅⋅=
πτ (3.70)
în care: D - diametrul mediu de înfăşurare al arcului; d - diametrul sârmei arcului; k - coeficientul de corecţie al arcului.
Din (3.70) rezultă:
ta
a cFkd
τπ ⋅⋅′′⋅⋅
=8
(3.71)
în care: [ ]MPata 700=τ (efortul admis la torsiune )
c - raportul dintre diametre se recomandă c = 5...8; Coeficientul de corecţie ce depinde de raportul dintre diametre se
calculează cu relaţia :
( ) cc
ck
615,0
14
14 +−−= (3.72)
Definitivarea diametrului d se face ţinând seama de faptul că sârma trasă din oţel pentru arcuri este standardizată şi dimesiunile acesteia sunt date în tabelul 3.4. Tabelul 3.4
Sârmă trasă din oţel carbon de calitate
pentru arcuri 2,5 2,8 3,0 4,0 4,5 5 5,5 6,0 7,0 - - - -
Sârmă trasă din oţel pentru arcuri
3 3,2 3,5 4,6 4,5 5,5 5,6 6,0 6,3 6,5 7,0 7,5 8.0
Cunoscând diametrul d şi raportul c=d
D , se determină diametrul mediu de
înfăşurare al arcului cu relaţia: dcD ⋅= . Determinarea numărului de spire ale arcului. Pentru determinarea numărului de spire active ns, se porneşte de la formula săgeţii arcului elicoidal cilindric.
4
38
dG
nDFf sa
⋅⋅⋅′⋅
= ămş (3.73)
în care: G - modulul de elasticitate transversal care pentru oţel este: G = 8x105 daN/cm2.

AMBREIAJUL
46
Din (3.73) rezultă:
3
4
8 DF
fdGn
as ⋅′⋅
⋅⋅= (3.74)
în care : 1kf
Fa =′
(rigiditatea arcului)
Rezultă:
13
4
8 kD
dGns ⋅⋅
⋅= (3.75)
Pentru a putea determina numărul de spire active, va trebui determinată rigiditatea k1. În acest scop se va analiza funcţionarea arcului pentru diferite situaţii ale ambreiajului.
Figura 3.49 În figura 3.49 este reprezentată caracteristica arcului de presiune în care s-
au notat: f - săgeata arcului când ambreiajul este cuplat;
f1 - săgeata arcului corespunzător ambreiajului decuplat; f2 - săgeata arcului corespunzător ambreiajului cuplat având uzura maximă a garniturilor de frecare; aF ′ - forţa dezvoltată de arc când ambreiajul este cuplat; aF ′′ - forţa dezvoltată de arc când ambreiajul este decuplat; aF ′′′ - forţa dezvoltată de arc pentru ambreiajul cuplat cu garniturile de frecare uzate;
L, L1, L2 - lungimile corespunzătoare forţelor aF ′ , aF ′′ , aF ′′′ ; L0 - lungimea arcului în stare liberă.

AMBREIAJUL
47
Creşterea forţei arcului de la 'aF la ''aF se datorează deformaţiei
1f∆ (cursa activă a arcului). Cunoscând forţele 'aF , ''aF precum şi deformaţia 1f∆ se poate calcula k1 cu relaţia:
1
1'''
f
FFk aa
∆−
≅ (3.76)
Săgeata suplimentară 1f∆ corespunzătoare deformării arcului la decuplarea ambreiajului, se poate determina în funcţie de jocul neceasar între suprafeţele de frecare în poziţia decuplat cu relaţia: dd jnf ⋅⋅=∆ 21 (3.77) în care:
nd - numărul discurilor conduse; jd - jocul dintre o pereche ale suprafeţelor de frecare pentru decuplarea completă a ambreiajului; jd = 0,75...1,5mm pentru ambreiaje monodisc; jd = 0,50...0,70mm pentru ambreiaje bidisc; jd = 0,25...0,30mm pentru ambreiaje cu mai multe discuri. Dacă ambreiajul este prevăzut cu discuri conduse elastice în direcţie axială săgeata suplimentară a arcului corespunzătoare decuplării ambreiajului se calculează cu relaţia : jnjnf ddd ⋅+⋅⋅=∆ 21 (3.78)
în care: j - este creşterea grosimii discului elastic în direcţia axială, în poziţia decuplată a ambreiajului j = (0,5...1,5)mm. Discurile elastice (în direcţie axială) se utilizează în special la ambreiajul monodisc, la care săgeata suplimentară se recomandă mmf 5,21 ≤∆ . Pentru arcurile de presiune dispuse periferic se recomandă ca rigiditatea k1 = 6,5...10daN/mm. Cunoscând rigiditatea k1 se determină cu relaţia (3.75) numărul de spire active ns, care este recomandabil să fie ns≥6. Numărul total de spire se determină cu relaţia:
2+= st nn (3.79) În general numărul total de spire se adoptă astfel încât să fie multiplu de 0,5.
În tabelul 3.5 sunt date principalele caracteristici ale arcurilor periferice folosite la ambreiaje.

AMBREIAJUL
48
Tabelul 3.5 Forţa dezvoltată de arc
[daN] minimă maximă
Diametrul exterior [mm]
Lungimea de lucru a arcului
[mm]
Numărul de spire
11,3 13,6 17,5 39,7 14 22,6 24,6 17,5 39,7 13,5 45 47,6 17,5 39,7 10,25
54,5 59,0 30 39,7 7,25 59 63,5 28,6 39,7 8,5 59 63,5 27 39,7 8,5 66 68 27 39,7 8,5 68 72,5 27 39,7 8,75 77 82 28,5 39,7 7,5 100 100 32,5 42,9 8
Determinarea lungimii arcului în stare liberă. Lungimea arcului în stare liberă (L0) se determină cu relaţia L0 = L1 +f1, (3.80)
în care: ( ) ( )121 ++⋅+= snsjdsnL (3.81)
în care: dsj 1,0≥ , iar pentru automobile js = 1mm.
Distanţa minimă între spire se determină cu relaţia:
4
3
1
8
dG
nDFf sa
⋅⋅⋅′′⋅
= (3.82)
Înlocuind (3.81) şi (3.82) în (3.80) rezultă lungimea arcului în stare liberă,
care trebuie să aibă 30 ≤D
L pentru evitarea flambajului.
Determinarea lucrului mecanic necesar debreierii.
Pentru calculul lucrului mecanic necesar debreieri se utilizează relaţia :
ana
aFaF
dL ⋅⋅′′+′
= η1
2 (3.83)
în care: aη - randamentul mecanismului de acţionare ( )98,0...8,0=aη ;
na - numărul arcurilor sub presiune; Lucrul mecanic necesar debreierii are valoarea Ld = 0,5...2,5daN.

AMBREIAJUL
49
b. Calculul arcurilor de presiune centrale
Pentru calculul ambreiajelor cu arc central, trebuie să se ţină seama că forţa arcului se transmite la discul de presiune prin intermediul pârghiilor lamerale de debreiere figura 3.50.
Forţa dezvoltată în arcul central se determină cu relaţia:
p
ac i
FF = (3.84)
în care :
b
ai p = - raportul de multiplicare al pârghiilor, (variază între limitele Ip =
4,5...8).
f
rm
a C
FRi
M
F
+⋅⋅
⋅
=µβ max
(3.85)
Introducând în (3.84) rezultă :
fp
rm
c Ci
FRi
M
F⋅
+⋅⋅
⋅
=µβ max
(3.86)
Arcurile centrale pot avea formă conică sau cilindrică, iar secţiunea circulară, pătrată sau dreptunghiulară, iar relaţiile de calcul pentru acestea, sunt date în tabelul 3.6.
S-au utilizat următoarele notaţii : - Fc - forţa dezvoltată de arcul central; - D - diametrul mediu al spirelor;
- r1 şi r2 - raza minimă şi maximă a arcului;
- G - modulul de elasticitate transversal;
- ns - numărul de spire active; - k - coeficientul de corecţie ce depinde de
raportul d
D , (se ia din tabelul 3.7);
- ϕ şi Ψ - coeficienţi ce depind de
raportul b
a , (se ia din tabelul 3.8)
R
Fc
F
Figura 3.50

AMBREIAJUL
50
Tabelul 3.6 Forma arcului Secţiunea sârmei Tensiunea σ Săgeata f
3
8
d
DFk c
⋅⋅⋅
⋅=π
τ 4
38
dG
nDFf sc
⋅⋅⋅⋅
=
3416,0 a
DFc
⋅⋅
=τ 4
3
567,0aG
nDFf sc
⋅⋅⋅
=
4
3
bG
nDFf sc
⋅⋅⋅
= ϕ
Cilindric
baba
DFc
⋅⋅⋅
⋅=ψτ
4
3
aG
nDFf sc
⋅⋅⋅
= ϕ
3216
d
rFk c
⋅⋅⋅
⋅=π
τ
3208,0 a
DFc
⋅⋅
=τ
Conic
22
ba
rFc
⋅⋅⋅
=ψ
τ
+=
2
2
11r
rff cil
Tabelul 3.7
d
Dm 2,5 3 4 5 6 7 8 9 10
K 1,70 1,55 1,39 1,29 1,24 1,20 1,18 1,16 1,14
Tabelul 3.8
b
a 1,0 1,5 1,75 2,0 2,5 3,0 4,0 6,0 10
ϕ 5,567 2,670 2,086 1,713 1,256 0,996 0,638 0,439 0,252 Ψ 2,404 1,442 1,195 1,016 0,775 0,625 0,442 0,278 0,160
c. Calculul arcurilor centrale de tip diafragmă
Determinarea caracteristicii arcurilor centrale de tip diafragmă Caracteristica arcurilor diafragmă F = ϕ (f) este dată în figura 3.46 şi este
determinată în primul rând de raportul dintre înălţimea H a arcului şi grosimea h a materialului.

AMBREIAJUL
51
Figura 3.51 Pentru automobile se utilizează arcuri care corespund curbei 2, la care
raportul h
H are o valoare medie.
Aceste arcuri conţin porţiuni cu rigiditatea negativă unde creşterea săgeţii se produce la micşorarea forţei (regim instabil de funcţionare a arcului). Dacă se alege punctul de lucru a rezultă variaţii mici de forţă de apăsare la variaţii mari ale săgeţii.
Figura 3.52
Arcul tip diafragmă fără tăieturi după generatoare. Schema pentru determinarea caracteristicii arcului diafragmă fără tăieturi este prezentată în figura 3.52,a, în care s-a notat:
F1- forţa de apăsare a arcului diafragmă asupra discului de presiune; F2 – forţa cu care rulmentul de presiune apasă asupra arcului diafragmă la
decuplare. Relaţiile de legătură dintre forţele F1, F2 şi f1, f2 au fost deduse
considerând arcul diafragmă ca un înveliş conic cu pereţi subţiri în zona deplasărilor mari.
Aceste relaţii sunt :

AMBREIAJUL
52
( )
+
−−⋅−
−−⋅−⋅
−⋅⋅= 21
1121 2ln
6
'h
cb
abfH
cb
abfH
a
bf
cb
hEF
π (3.87)
( )( )
+
−−⋅−
−−⋅−⋅
−−⋅⋅= 21
112 2ln
6
'h
cb
abfH
cb
abfH
a
bf
accb
hEF
π(3.88)
în care :
21
'µ−
= EE (µ - coeficientul lui Poisson 3,025,0 ÷=µ )
24 daN/mm 101,2 ⋅=E Între F1 şi F2 există relaţia de legătură:
cb
ac
F
F
−−=
2
1 (3.89)
Relaţiile (3.87) şi (3.88) pot fi examinate şi în funcţie de săgeata f2 dacă se ţine seama de legătură dintre f1 şi f2 :
cc
ab
f
f
−−=
2
1 (3.90)
Relaţiile (3.87) şi (3.88) permit să se cerceteze în întregime cuplarea şi decuplarea ambreiajului, iar prin reprezentarea grafică se obţine caracteristica arcului diafragmă figura 3.52, b.
În cadranul I este reprezentată grafic relaţia ( )111
fF ϕ= Aceeaşi curbă o reprezintă şi relaţia ( )
211fF ϕ= dar la o altă scară pentru f,
în conformitate cu relaţia (3.90). În cadranul IV este construit graficul ( )
121fF ϕ= sau ( )
222` fF ϕ=
Sectorul OA corespunde prestrângerii arcului la montarea ambreiajului. În cazul ambreiajului cuplat , forţa de apăsare a arcului diafragmă asupra
discului de presiune şi săgeata arcului sunt determinate de coordonatele punctului A(F1c,f1c).
La decuplarea ambreiajului, când forţa F1 variază între F1c şi 0 (dreapta AB) săgeata f1 (şi prin urmare f2) rămâne constantă şi egală cu f1c. Variaţia respectivă a forţei F2 este determinată de dreapta BC.
Legătura dintre forţele F1 şi F2 în procesul decuplării se obţine din condiţia că la valoarea constantă a săgeţii f 1 trebuie să fie constantă şi valoarea momentelor (forţelor F1 şi F2) din secţiunea arcului şi egală cu momentul corespunzător forţei F1c adică:
( ) ( ) ( )cbF
acF
cbF c −=−+−
πππ 222121 (3.91)
sau
cFcb
acFF 121 =
−−+ (3.92),
care relaţie este ecuaţia unei drepte în coordonate F1 şi F2 şi este reprezentată grafic în cadranul II.

AMBREIAJUL
53
Dacă dFF 22 ≥ , atunci F1 = 0. Caracteristica de decuplare a ambreiajului corespunde sectorului BC şi
CD. Deplasările rulmentului de presiune şi mărimea jocurilor dintre discul de presiune şi discul condus se determină cu ajutorul sectorului CD.
În figura 3.52,b este reprezentat prin linie groasă, partea din caracteristică corespunzătoare funcţionării ambreiajului.
Arcul tip diafragmă cu tăieturi după generatoare. Arcul diafragmă continu prezentat anterior este foarte rigid. Pentru
mărirea elasticităţii, îndeosebi la decuplare, la ambreiajele de automobil se utilizează arcuri diafragmă prevăzute cu tăieturi după generatoare pe o anumită lungime figura 3.53.a.
În figura 3.53.b. se prezintă schema pentru determinarea caracteristicii arcului, în care:
f1 - este săgeata părţii f ără tăieturi şi se datorează în întregime unghiului de răsucireϕ ;
''' 222 fff += - săgeata părţii cu tăieturi a arcului; '2f - săgeata părţii cu tăieturi, datorită unghiului de răsucire ϕ; ''2f - săgeata datorită încovoierii lamelelor părţii cu tăieturi.
Pentru analiza procesului de decuplare trebuie să se găsească relaţia dintre săgeata f1 şi forţele F1 şi F2 la acţionarea concomitentă.
Figura 3.53 Egalând momentele forţelor exterioare cu momentul forţelor interioare din partea continuă a arcului şi ţinând seama că săgeata f1 se datorează în întregime unghiului de rotire ϕ a părţii continue a arcului se obţine relaţia:
( )
+
−−⋅−
−−−⋅
−⋅⋅=
−−+= 22
11221 2ln
6
'h
cb
abfH
cb
abfH
a
bf
cb
hE
cb
ecFFF
π
(3.93) în care: H – înălţimea părţii continue a arcului. Dacă Ht este înălţimea totală a arcului, atunci :
cb
abHH t −
−⋅= (3.94)
Săgeţile '2f şi ( )2222 ''''' ffff =+ sunt date de relaţiile:

AMBREIAJUL
54
cb
ecff
−−= 12 ' (3.95)
3
2
22
2
3
2
226
ln1212
16''
hE
eAF
e
a
e
a
e
a
E
eFf
⋅⋅⋅⋅⋅=
+
−−
−
⋅⋅⋅=
ηππηπ
(3.96)
În care A depinde de raportul e
a figura 3.53.c.
Coeficientul η este dat de relaţia :
( )ea
zl
+⋅
=π
η 1 (3.97)
în care : z – numărul lamelelor ( )12≥z ; 1l - lăţimea lamelei Pentru simplificarea calculelor formula (3.96) se prezintă sub forma :
( )
+
−−⋅−⋅
−⋅⋅= 1
2ln
6
''' 112 cb
ab
h
f
h
H
a
b
h
f
cb
hEF
π (3.98)
Dacă se notează mărimile adimensionale: ( )
4
2
'
6
hE
cbFF
⋅⋅−=
π şi
h
ff 11 =
Rezultă:
( )
+
−−−
−−−= 1
2ln 111 cb
abf
h
H
cb
abf
h
H
a
bfF (3.99)
Calculul de rezistenţă al arcului diafragmă
În cazul arcului diafragmă cu tăieturi după generatoare solicitarea maximă apare în punctul B din mijlocul bazei lamelei figura 3.54.
Figura 3.54 Pentru calcule practice se poate lua pentru acest punct starea de eforturi
unitare biaxială. Tensiunea normală de compresiune cσ este dat de relaţia :
( )( )
a
hdaEc
ααµ
σ −−⋅−
=2
212 (3.100)

AMBREIAJUL
55
în care :
b
aab
dln
−= ; cb
H
−=α este unghiul de înclinaţie.
Tensiunea la solicitarea de încovoiere iσ se calculează cu relaţia :
ηηπ
σ⋅
≈⋅
⋅=2
22
23
h
F
h
Fi (3.101)
Tensiunile ating valoarea maxime în timpul decuplării ambreiajului la trecerea ambreiajului prin poziţia plană. Tensiunea echivalentă în ipoteza tensiunii tangenţiale maxime va fi dată de relaţia :
( )( )
a
hadE
h
F dciech
ααηη
σσσ +−⋅−
+⋅
=−=2
222
12 (3.102)
în care: F2d - forţa de decuplare. Tensiunea echivalentă se compară cu rezistenţa de curgere la întindere a materialului, dacă numărul de decuplări şi cuplări ale ambreiajului este mic (nu depăşeşte 105) Dacă numărul de decuplări este mare, tensiunea echivalentă se compară cu rezistenţa la oboseală a ciclului pulsator de întindere.
Oţelurile recomandate pentru executarea arcurilor de presiune sunt cele date în tabelul 3.9 Tabelul 3.9
Tipul arcului de presiune Materialul STAS-ul Arcuri elicoidale cilindrice şi conice Arc2 795-92 Arcuri diafragmă Arc1 795-92

C.C.A. – Cutii de viteze
1
CAPITOLUL 4
SCHIMBĂTORUL DE VITEZE 4.1. Rolul, condiţiile impuse şi clasificarea schimbătoarelor de viteze 4.1.1. Rolul şi condiţiile impuse schimbătoarelor de viteze Schimbătorul de viteze (cutia de viteze) este un ansamblu de mecanisme cuprins în
lanţul cinematic al transmisiei, după ambreiaj, care permite schimbarea raportului de transmitere a mişcării de rotaţie de la motor la roţi, realizând asfel adaptarea posibilităţilor energetice ale motorulul la cerinţele energetice ale autovehiculului.
Cum majoritatea autovehiculelor actuale sunt echipate cu motoare cu ardere internă, a căror particularitate constă în faptul că permit o variaţie limitată a momentului motor, respectiv a forţei de tracţiune, este necesară intercalarea schimbătoarelor de viteze în transmisia acestora, ele având rolul :
- să permită adaptarea forţei de tracţiune şi a vitezei de deplasare în funcţie de variaţia rezistenţelor la înaintare şi de regimul de circulaţie al autovehiculului;
- să permită autopropulsarea autovehiculului cu viteze reduse ce nu pot fi asigurate direct de către motorul cu ardere internă, care are turaţia minimă stabilă relativ mare;
- să permită mersul înapoi al autovehiculului fără a inversa sensul de rotaţie al motorului;
- să realizeze întreruperea îndelungată a legăturii dintre motor şi restul transmisiei, în cazul în care autovehiculul stă pe loc, cu motorul în funcţiune. Necesitatea utilizării schimbătoarelor de viteze rezultă şi din analiza bilanţului de puteri la roţile autovehiculului.
În timpul deplasării autovehiculului bilanţul de puteri la roţile motoare este dat de relaţia:
rmt PP =⋅η (4.1)
în care:
tη - randamentul transmisiei;
Pm- puterea la arborele motorului; Pr- puterea rezistentă la roţile motoare. Exprimând puterile în funcţie de turaţie se obţine:
60
n2MMPm
πω =⋅= (4.2)
60
2 rrrrr
nMMP
⋅=⋅=
πω (4.3)
în care: M- momentul motor [daNm]; Mr- momentul rezistent [daNm]; ω - viteza unghiulară a arborelui motor [s-1];
rω - viteza unghiulară a roţilor motoare;
n- turaţia arborelui motor [rot/min];

C.C.A. – Cutii de viteze
2
nr- turaţia roţilor motoare [rot/min]. Înlocuind (4.2) şi (4.3) în (4.1) rezultă:
n
nMM r
rt
⋅=η1
(4.4)
Din analiza acestei relaţii se observă că în cazul în care turaţia n şi momentul motor M se menţin constante, la creşterea momentului rezistent Mr, trebuie micşorat raportul nr/n, iar la scăderea lui trebuie mărit raportul nr/n.
Schimbarea acestui raport nr/n se realizează cu ajutorul schimbătorului de viteze. Se poate observa de asemenea că raportul nr/n ar trebui să varieze continuu, şi ideal ar
fi ca să se dispunem de un schimbător de viteze cu un număr infinit de rapoarte de transmitere.
Însă, în prezent la majoritatea autovehiculelor se utilizează schimbătoare de viteze cu un număr limitat de trepte, impuse mai ales de posibilităţile constructive, dar şi de preţul de cost.
Pentru realizarea unei adaptabilităţi bune a autovehiculului la condiţiile concrete de deplasare, schimbătorul de viteză trebuie să îndeplinească următoarele condiţii :
- să aibă posibilitatea realizării unui număr cât mai mare de rapoarte de transmitere, care să asigure autovehiculului cele mai bune calităţi dinamice şi economice la o caracteristică exterioară dată a motorului;
- construcţia să fie simplă şi robustă, să asigure o funcţionare sigură, randament bun, greutate mică şi gabarit redus;
- în exploatare funcţionarea să fie silenţioasă, să aibă fiabilitate ridicată, acţionarea simplă şi comodă şi să asigure întreţinere uşoară;
- să prezinte o gamă largă de utilizare. Calităţile dinamice şi economice ale autovehiculului, depind de alegerea corectă a
numărului de trepte şi a rapoartelor de transmitere ale schimbătorului de viteze. Prin mărirea numărului de trepte motorul are posibilitatea să lucreze în regimuri apropiate de cele optime ca putere şi economicitate, dar odată cu creşterea numărului de trepte se complică construcţia schimbătorului de viteze, se îngreunează acţionarea, greutatea şi gabaritul cresc.
Funcţionarea sigură şi silenţioasă a schimbătorului de viteze depinde de tipul angrenajelor utilizate, iar fiabilitatea ridicată se asigură prin dimensionarea corectă a pieselor şi prin alegerea materialelor şi tratamentelor termice corespunzătoare.
Acţionarea simplă şi comodă este legată de schema constructivă a schimbătorului de viteze, de sistemul de cuplare a treptelor şi de construcţia mecanismului de acţionare.
4.1.2. Clasificarea schimbătoarelor de viteze Schimbătoarele de viteze se pot clasifica astfel: după modul de variaţie a raportului de
transmitere şi după modul de schimbare a treptelor de viteze. După modul de variaţie a raportului de transmitere, schimbătoarele de viteze pot fi: a) - în trepte;
b) - continue sau progresive; c) - combinate.

C.C.A. – Cutii de viteze
3
a. Schimbătoarele de viteze în trepte. La acestea variaţia raportului de transmitere este discontinuă şi se clasifică în funcţie
de poziţia axelor arborilor şi după numărul treptelor pentru mersul înainte. După poziţia axelor arborilor, în timpul funcţionării, schimbătoarele de viteze în
trepte pot fi: - cu axe fixe (simple), la care arborii au axa geometrică fixă;
- planetare, la care axele unor arbori execută o mişcare de revoluţie în jurul unui ax central.
După numărul treptelor de viteze, schimbătoarele de viteze pot fi cu trei, patru, cinci sau mai multe trepte.
b. Schimbătoarele de viteze continue sau progresive. La acestea variaţia raportului de transmitere este continuă între anumite limite şi se
clasifică, după principiul de transformare a momentului, în: - mecanice, de tipul cu fricţiune şi cu impulsuri; - hidraulice, de tipul hidrodinamice sau hidrostatice; - electrice. c. Schimbătoarele de viteze combinate. Reprezintă, o asociere între un hidrotransformator şi un schimbător de viteze în trepte,
de obicei planetar. După modul de schimbare a treptelor de viteze, Schimbătoarele de viteze pot fi:
- cu acţionare directă, la care schimbarea treptelor se face, în general, manual sau cu ajutorul unui servomecanism;
- cu acţionare semiautomată, la care numărul de operaţii necesare trecerii în treapta următoare se reduce (stabilirea treptei de viteze se face de către conducător, dar schimbarea se efectuează de către un servomecanism);
- cu acţionare automată, la care schimbarea treptelor se face în mod automat, în funcţie de condiţiile de mers, asigurând autovehiculului regimul optim de mişcare în ce priveşte calităţile dinamice sau economice. 4.2. Schimbătoare de viteze mecanice în trepte cu arbori cu axe fixe
Cele mai răspândite schimbătoare de viteze folosite la autovehicule sunt cele cu variaţia în trepte a raportului de transmitere, cu arbori cu axe fixe şi cu acţionare mecanică. Aceste schimbătoare de viteze permit obţinerea variaţiei raportului de transmitere în limitele necesare realizate cu o construcţie nu prea complicată, având un randament ridicat şi un preţ de cost scăzut.
Schimbătoarele de viteze în trepte sunt alcătuite din: - mecanismul reductor (schimbătorul de viteze propriu-zisă); - mecanismul de acţionare;
- dispozitivul de fixare a treptelor; - dispozitivul de zăvorâre a treptelor;
Mecanismul reductor este partea principală a schimbătorului de viteze şi serveşte la modificarea raportului de transmitere, respectiv a momentului motor, în funcţie de variaţia rezistenţelor la înaintarea autovehiculului.

C.C.A. – Cutii de viteze
4
Constructiv schimbătoarele de viteze se compun din doi sau trei arbori pe care se află montate mai multe perechi de roţi dinţate (cu ajutorul cărora se transmite mişcarea între arbori) şi dintr-un carter (carcasă). Mecanismul de acţionare serveşte la cuplarea şi decuplarea treptelor. Dispozitivul de fixare a treptelor nu permite trecerea dintr-o treaptă în alta sau în poziţia neutră, decât la intervenţia conducătorului. Dispozitivul de zăvorâre (blocare) nu permite cuplarea simultană a mai multor trepte.
4.2.1. Mecanisme de cuplare a treptelor Cuplarea treptelor la schimbătoarele de viteze se poate obţine: prin roţi dinţate cu
deplasare axială; prin roţi dinţate cu angrenare permanentă şi mufe de cuplare, sau cu mufe de cuplare şi dispozitive de sincronizare.
În construcţia actuală de autovehicule se utilizează pentru angrenajele care realizează rapoartele de transmitere, perechi de roţi angrenate permanent, la care una din roţi este liberă pe arbore, iar roata cojugată montată rigid pe arbore.
Solidarizarea roţilor libere de arborele pe care sunt montate se face cu ajutorul mecanismelor de cuplare. Mecanismele de cuplare a treptelor cu roţi dinţate cu angrenare permanentă şi mufe de cuplare pot fi: cu mufe de cuplare simple; cu mufe de cuplare cu dispozitiv de sincronizare (sincronizatoare); cu mufe de cuplare cu dispozitiv tip roată liberă.
Cuplarea treptelor prin roţi dinţate cu deplasare axială. Cuplarea treptelor prin roţi diţate cu deplasarea axială este prezentată în figura 4.1. Roata dinţată 1 este fixată prin pană de arborele 3, iar roata dinţată 2 este solidarizată de arborele 4 prin intermediul unor caneluri şi se poate deplasa axial pe acesta.
Figura 4.1 Roata 2 este prevăzută lateral cu un locaş în care intră braţele furcii, care serveşte la
deplasarea axială a roţii pe arborele canelat 4 în vedera cuplării sau decuplării treptei. Această varintă constructivă, din cauza vitezelor tangenţiale diferite ale roţilor care
urmează să angreneze, prezintă următoarele dezavantaje: uzura rapidă a dinţilor roţilor pe partea frontală şi degradarea prematură a lor; zgomot şi şocuri la cuplare; dificultăţi pentru conducătorul auto la schimbarea treptelor.

C.C.A. – Cutii de viteze
5
Cu toate aceste dezavantaje, această soluţie de cuplare a treptelor se mai utilizează în construcţia autovehiculelor actuale la treptele inferioare ale schimbătoarelor de viteze, precum şi pentru obţinerea treptei de mers înapoi, datorită simplităţii şi a costului redus. Pentru eliminarea parţială a acestor dezavantaje, la fabricarea roţilor dinţate, partea laterală a dinţilor cu care intră în angrenare se uzinează cu înclinări şi rotunjiri.
Cuplarea treptelor prin roţi dinţate cu angrenare permanentă şi mufe de cuplare simple
Cuplarea treptelor prin roţi dinţate cu angrenare permanentă şi mufe de cuplare simple poate fi: cu mufă de cuplare cu dantură periferică; cu mufă de cuplare cu dantură frontală. În figura 4.2.a, se prezintă soluţia de cuplare a treptelor prin roţi dinţate permanent angrenate şi mufă de cuplare cu dantură periferică.
Figura 4.2
Roata 1 este fixată pe arborele 5 prin intermediul unei pene, iar roata 2 se roteşte liber
pe arborele 4. Ambele roţi sunt angrenate permanent. Prin cuplarea danturii d1 a mufei 3 cu dantura d2 a roţii dinţate 2, aceasta se solidarizează cu arborele 4.
În practică, se întâlneşte şi soluţia la care dantura d1 este interioară şi dantura d2 este exterioară (figura 4.2, b).
În cazul variantei din figura 4.2. c, roata dinţată 1 prevăzută cu dantura d2 este montată pe arborele 3 prin intermediul unui rulment şi este permanent angrenată cu roata dinţată 2 de pe arborele 4. Mufa este realizată sub forma unui inel 6 cu dantura interioară d1 ce poate să culiseze pe dantura exterioară a butucului 5, prevăzut cu caneluri interioare. Cuplarea se obţine prin deplasarea inelului 6 până ce dantura d1 cuplează cu d2. Pentru uşurarea cuplării, danturile de cuplare sunt executate cu module mici şi număr mare de dinţi.
În figura 4.2,d, se prezintă cuplarea treptelor prin roţi dinţate permanent angrenate şi mufă de cuplare cu dantură frontală. Prin deplasarea spre dreapta a mufei 3, dantura frontală (craboţii) d1 se cuplează cu dantura frontală d2 a roţii 2, permiţând transmiterea mişcării de la roata 1 de pe arborele 5 la arborele 4 sau invers.
Nici la soluţia cu roţi dinţate permanent angrenate şi mufe de cuplare simple şocurile n-au fost eliminate ci numai orientate de la dantura roţilor la dantura mufei. Datorită faptului că toţi dinţii mufei vin în contact în acelaşi timp, uzura va fi mai mică, deoarece sarcina preluată de un dinte este mult mai redusă.
La soluţia cu mufe de cuplare simple apare însă şi un dezavantaj în plus, care constă în mărimea momentului de inerţie al pieselor care suferă o accelerare sau o decelerare la schimbarea treptelor. Astfel în cazul schimbătoarelor de viteze cu trei trepte, înlocuirea

C.C.A. – Cutii de viteze
6
soluţiei cu roţi dinţate cu deplasare axială cu soluţia cu mufe de cuplare simple conduce la mărirea momentului de inerţie (redus la arborele primar) al pieselor în mişcare de rotaţie, cu până la 40%.
În figura 4.3 este redată schema de funcţionare a unei mufe care permite o cuplare mai uşoară a treptelor. O astfel de mufă care permite uşurarea cuplarii treptelor prezintă unele particularităţi şi anume: dinţii danturilor de cuplare d1 şi d2 ale roţilor dinţate 1 şi 2 alternează, unul scurtat, la jumătate din lungime, cu unul de lungime normală, iar dinţii mufei m sunt jumătate din numărul dinţilor danturilor de cuplare d1 şi d2. De asemenea, marginile dinţilor danturilor de cuplare, ai roţilor dinţate şi ai mufei, sunt teşite.
Figura 4.3 Figura 4.4 Prin deplasarea mufei m spre stânga, dinţii ei pătrund la început mai uşor în intervalele
mai largi dintre dinţii mai lungi ai danturii de cuplare d1 a roţii dinţate 1 (figura 4.3,a). Dinţii mufei m şi cei ai danturii de cuplare d1 au viteze unghiulare diferite, iar prin cuplare suprafeţele laterale ale lor vin în contact şi îşi egalează vitezele de rotaţie (figura 4.3, b). În această situaţie, pentru cuplarea completă, deplasarea mai departe spre stânga a mufei se face mai uşor (figura 4.3,c). Utilizarea mufelor care uşurează cuplarea treptelor la schimbătoarele de viteze permite să se accelereze întrucâtva procesul de schimbare a treptelor datorită micşorării probabilităţii de a se întâlni dinte cu dinte.
În figura 4.4 este reprezentată construcţia unei mufe ce permite cuplarea mai uşoară a treptelor, la care, pentru evitarea autodecuplării mufei, dantura manşonului 5 se execută înclinată cu unghiul γ, care determină apariţia unei forţe axiale ce menţine mufa în poziţie cuplată. De subliniat este faptul că nici această soluţie constructivă nu poate diminua şocul care apare la schimbarea treptelor.
Cuplarea treptelor cu sincronizatoare. Sincronizatoarele sunt mecanisme cu ajutorul cărora se realizează egalarea vitezelor
unghiulare ale arborelui şi roţii dinţate înainte de solidarizarea la rotaţie a lor, permiţând o schimbare rapidă şi fără şoc a treptelor, independent de îndemânarea conducătorului.
Sincronizatoarele se clasifică după principiul de funcţionare şi după forma suprafeţelor de frecare.

C.C.A. – Cutii de viteze
7
După principiul de funcţionare, se deosebesc: sincronizatoare cu presiune constantă, sincronizatoare cu inerţie sau sincronizatoare cu blocare.
După forma suprafeţelor de frecare, pot fi: sincronizatoare cu conuri; sincronizatoare cu discuri.
Sincronizatorul conic cu presiune constantă. În figura 4.5 se reprezintă construcţia sincronizatorului conic cu presiune constantă şi
fazele succesive de cuplare.
Figura 4.5 Sincronizatorul este dispus la capătul anterior al arborelui secundar 11 între roata
dinţată 2, ce face corp comun cu arborele primar 1 şi roata dinţată 7, care se roteşte liber pe arborele secundar. Roţile dinţate 2 şi 7 sunt prevăzute cu danturile speciale de cuplare 10 şi 8 şi cu suprafeţele tronconice c şi c1. Manşonul 9 al sincronizatorului este prevăzut cu caneluri interioare pentru a putea culisa pe canelurile arborelui secundar 11. Pe suprafaţa exterioară manşonul este prevăzut cu o dantură identică cu cea a danturilor 8 şi 10, pe care culisează coroana 3 cu dantură interioară. Manşonul este prevăzut cu orificii radiale în care sunt introduse arcurile 6 ce acţionează asupra bilelor 5. În părţile laterale, manşonul este prevăzut cu suprafeţele conice c′ corespunzător suprafeţelor conice c şi c1 ale roţilor 2 şi 7.
Prin intermediul furcii 4, conducătorul deplasează coroana 3 spre stânga sau spre dreapta, până când se va cupla cu dantura 10 sau 8, solidarizând arborele primar cu arborele secundar (priza directă) sau arborele secundar cu roata dinţată 7. În scopul uşurării cuplării treptei, dinţii coroanei şi ai danturilor 8 şi 10 sunt teşiţi. Coroana este prevăzută la interior cu un canal inelar în care intră bilele fixatorului, care solidarizează manşonul cu coroana.
La cuplarea treptei de priză directă, coroana 3 se deplasează spre stânga (cu ajutorul mecanismului de acţionare), iar prin intermediul bilelor 5 ce se găsesc sub acţiunea arcurilor 6, deplasează în acelaşi timp şi manşonul 11. Coroana şi manşonul se deplasează împreună până ce suprafaţa conică interioară c′ a manşonului vine în contact cu suprafaţa conică interioară c a roţii dinţate 2. Sub acţiunea forţelor de frecare care apar între cele două suprafeţe conice, vitezele unghiulare ale roţii dinţate 2 şi manşonului (respectiv a arborelui primar şi secundar) se egalează, ceea ce permite cuplarea fără şoc şi fără zgomot a treptei. Pentru cuplarea propriu-zisă, conducătorul trebuie să mărească efortul aplicat manetei de acţionare, respectiv coroanei, pentru ca bilele 5 să învingă forţa arcurilor 6 şi să fie scoase din şenţuleţul inelar al coroanei şi presate în orificiile din manşon. În felul acesta, coroana are

C.C.A. – Cutii de viteze
8
posibilitatea să se deplaseze liber în raport cu manşonul, până când dantura se va cupla cu dantura 10, stabilind o legătură rigidă între arborele primar şi arborele secundar. Prin deplasarea spre dreapta a coroanei, sincronizatorul funcţionează analog, fiind obligatorie solidarizarea la rotaţie a roţii dinţate 7 cu arborele secundar 11. Pentru cuplarea treptei fără şoc, este necesar ca, sub acţiunea forţelor de frecare care apar între suprafeţele conice, vitezele unghiulare ale arborelui secundar 11 şi ale roţilor dinţate 2 sau 7 să se egaleze. Realizarea sincronizării necesită un anumit timp, care depinde de forţa de apăsare a coroanei asupra suprafeţelor conice ale manşonului şi roţilor 2 sau 7. Dacă arcurile de fixare 6 sunt prea elastice, la cuplarea rapidă acţiunea sincronizatorului conic cu presiune constantă este insuficientă, iar dantura coroanei 3 vine în contact cu dantura 10 a roţii dinţate 2 mai devreme decât se realizează sincronizarea vitezelor unghiulare. În acest caz, schimbarea treptelor este însoţită de zgomot. În cazul în care arcurile 6 sunt prea rigide (pentru realizarea sincronizării şi la o cuplare rapidă), acţionarea cutiei de viteze devine mai dificil ă, deoarece, după egalarea vitezelor unghiulare, dacă părţile frontale ale dinţilor coroanei 3 se reazemă în dinţii danturilor 8 sau 10, frecarea mare dintre suprafeţele conice în contact împiedică realizarea unei mişcări unghiulare relative necesare pentru cuplarea dinţilor. Din cele prezentate rezultă că principiul de lucru al sincronizatorului conic cu presiune constantă se desfăşoară în două etape: în prima etapă se realizează sincronizarea vitezei unghiulare a arborelui cu a uneia dintre roţile dinţate cu care urmează să se cupleze; în a doua etapă se cuplează dantura coroanei cu dantura auxiliară a roţii dinţate respective , când se produce cuplarea propriu-zisă.
Sincronizatoarele conice cu inerţie. În comparaţie cu sincronizatoarele cu presiune constantă, sincronizatoarele cu inerţie
sunt mai complicate, având în plus dispozitive suplimentare de blocare, care permit cuplarea treptelor numai după egalarea vitezelor unghiulare ale arborelui şi roţii dinţate cu care urmează să se solidarizeze la rotaţie. Datorită faptului că sincronizatoarele cu inerţie garantează în orice condiţii cuplarea treptelor fără şocuri, ele au căpătat o largă răspândire în construcţia schimbătoarelor de viteze ale autoturismelor, autobuzelor şi autocamioanelor.

C.C.A. – Cutii de viteze
9
Sincronizatorul conic cu inerţie cu dantură de blocare este prezentat în figura 4.6. Pinionul 1 al arborelui primar se află în angrenare permanentă cu roata dinţată 15 a arborelui intermediar. Roata dinţată 10 este montată liber pe arborele secundar şi este în angrenare permanentă cu roata dinţată 11 a arborelui intermediar. Pinionul 1 şi roata dinţată 10 sunt executate dintr-o singură bucată cu coroanele dinţate 3 şi, respectiv 9, şi sunt prevăzute cu suprafeţele tronconice 2 şi 8.
Figura 4.6
Între pinionul 1 şi roata 10, pe partea canelată a arborelui secundar, se află manşonul 14 al sincronizatorului, prevăzut la exterior cu o dantură cu dinţi drepţi şi cu trei crestături longitudinale 16 în care intră piedicile (pastilele) 5, având în mijloc un orificiu.
Pe dantura exterioară a manşonului este dispusă coroana culisantă 13, prevăzută la exterior cu un guler pentru furca de acţiune 6 şi cu o dantură interioară, având un şenţuleţ semicircular 17, în care intră bilele 7 ale dispozitivului de fixare. Aceste bile se găsesc sub acţiunea arcurilor 18, dispuse în orificiile radiale ale manşonului. De ambele părţi ale manşonului, pe suprafeţele conice 2 şi 8, se găsesc dispuse inelele de sincronizare din bronz 12, prevăzute cu danturile de blocare 4, având acelaşi pas ca şi coroanele dinţate 3 şi 9 şi dantura interioară a coroanei 13. Părţile frontale ale danturilor de blocare şi ale dinţilor coroanelor roţilor dinţate, la partea dinspre manşon, sunt teşite sub acelaşi unghi ca şi dinţii interiori ai coroanei 13. Suprafaţa interioară a inelelor de sincronizare este prevăzută cu un filet fin care serveşte la ruperea peliculei de ulei, mărind în felul acesta frecarea dintre suprafeţele conice ale inelelor şi roţilor dinţate. În fiecare inel de sincronizare, la partea frontală dinspre manşon, sunt executate 3 ferestre 19 în care intră capetele pastilelor 5. Datorită faptului că partea centrală a pastilelor este aşezată în crestăturile 16, iar părţile laterale în ferestrele inelelor de sincronizare cu dantură de blocare, manşonul şi inelele se rotesc împreună. Trebuie subliniat însă că lăţimea ferestrelor 19 din inele este mai mare decât lăţimea pastilelor cu un joc puţin mai mare decât jumătate din grosimea dinţilor. Din acest

C.C.A. – Cutii de viteze
10
motiv, inelele au posibilitatea unei deplasări unghiulare în raport cu manşonul şi coroana 13. La rotaţia inelului de sincronizare în raport cu manşonul, cu un unghi determinat de jocul dintre pastile şi pereţii laterali ai ferestrelor, dinţii inelului se rotesc în raport cu dinţii coroanei 13 cu o jumătate din grosimea lor, împiedicând deplasarea coroanei în direcţia roţii dinţate care urmează să se cupleze. În aceasta constă acţiunea de blocare a danturii inelelor. Pentru cuplarea prizei directe, coroana şi pastilele 5, solidarizate prin bilele 7, se deplasează spre stânga cu ajutorul furcii 6. Pastilele sprijinindu-se cu capetele în ferestrele inelului de sincronizare 12, apasă acest inel pe suprafaţa conică 2. Datorită frecării care ia naştere între suprafeţele conice de contact, inelul cu dantura de blocare se roteşte în raport cu manşonul, în sensul rotirii roţii dinţate 1, cât îi permite jocul dintre pastilele 5 şi ferestrele 19 ale inelului. În urma rotaţiei inelului de sincronizare, cu un sfert de pas, dinţii inelului vin parţial în dreptul dinţilor coroanei 13, împiedicând deplasarea coroanei spre pinionul1, până când vitezele unghiulare ale pinionului 1 şi arborelui secundar nu se egalează. Efortul axial transmis de conducător asupra coroanei şi manşonului se transmite inelului care, apăsând asupra suprafeţei conice 2, dă naştere la o forţă de frecare ce conduce la la egalarea vitezelor unghiulare. În momentul în care vitezele unghiulare s-au egalat, dispare acţiunea de blocare a danturii inelului, deoarece atât forţa de frecare dintre suprafeţele conice, cât şi forţa care acţiona asupra suprafeţelor teşite ale dinţilor inelului şi coroanei se anulează. În această situaţie, coroana 13 se poate deplasa în lungul manşonului, după învingerea forţei arcurilor 7, prin împingerea bilelor în locaşul din plăcuţe, iar dantura ei va veni în contact cu dantura 3 a roţii 1, cuplând treapta fără şoc şi fără zgomot.
Fazele procesului de sincronizare, la cuplarea treptei de priză directă, sunt prezentate în figura 4.7. În figura 4.7.a este reprezentat sincronizatorul în poziţia neutră. În perioada de sincronizare (figura 4.7.b), când vitezele unghiulare ale roţii 1 şi arborelui secundar nu sunt egale, inelul de sincronizare 4 cu dantura de blocare 3 este apăsat de pastilele 5 pe suprafaţa conică a pinionului 1 şi dinţii coroanei 6 se sprijină cu teşiturile lor în teşiturile dinţilor inelului de blocare. În punctele de contact ale teşiturilor dinţilor ia naştere forţa F, iar sub acţiunea componentei axiale F1 a acestei forţe, inelul 4 este apăsat pe suprafaţa conică a pinionului 1 al arborelui primar. Unghiul teşiturilor este ales astfel, încât până în momentul în care vitezele unghiulare ale pinionului 1 şi ale inelului cu dantura de blocare 3 devin egale, componenta tangenţială F2 a forţei F să nu fie suficientă pentru a roti inelul cu dantura de blocare în sens opus celui de rotaţie al arborelui primar cu un unghi la care coroana 6 să poată fi deplasată spre stânga şi cuplată cu dantura de blocare.
Figura 4.7

C.C.A. – Cutii de viteze
11
În momentul în care vitezele unghiulare s-au egalat, componenta tangenţială F2 devine suficientă pentru a roti inelul în sens opus rotaţiei arborelui primar.
La terminarea procesului de sincronizare (figura 4.7,c), inelul cu dantura de blocare a fost rotit în sens opus sensului de rotaţie al roţii1, astfel dinţii interiori ai coroanei 6 au intrat în angrenare cu dinţii inelului de blocare. În acelaşi timp, bilele sunt scoase din orificiile coroanei, iar apăsarea pastilelor asupra inelului încetează. Cuplarea propriu-zisă se realizează deplasând coroana 6 până când dinţii acesteia se vor cupla cu dantura 2 a pinionului 1 (figura 4.7,d), iar arborele primar şi arborele secundar se solidarizează la rotaţie.
Figura 4.8 În figura 4.8 este reprezentat sincronizatorul cu dantură de blocare utilizat la cutiile de viteze de pe autoturismele Dacia. La acest sincronizator, în locul dispozitivului de fixare cu bile se utilizează un dispozitiv de fixare compus din pastilele 4 şi inelele elastice (arcurile de expansiune) 6. Sub acţiunea inelelor elastice pastilele 4 se sprijină cu proeminenţele 4′ în canalul 3′ din mijlocul coroanei 3, astfel încât coroana şi pastilele se deplasează axial împreună. Funcţionarea acestui tip de sincronizator este asemănătoare cu cea a sincronizatorului cu dispozitiv de fixare cu bile.
Sincronizatorul conic cu inerţie cu bolţuri de blocare (figura 4.9) este utilizat la cutiile de viteze de la autovehiculele SR şi ARO. Pe porţiunea canelată a arborelui secundar 11, între pinionul 2 al arborelui primar şi roata dinţată 10 (montată liber pe arborele secundar), este dispus manşonul 13. Coroana 6 este prevăzută cu o dantură interioară, cu care culisează pe canelurile exterioare 14 ale manşonului 13. Între coroana 6 şi ansamblul format din bolţurile de blocare 5, precum şi discurile conice de fricţiune 4 şi 8, există o legătură elastică dată de un dispozitiv de fixare format din bolţurile elastice 15, prevăzute cu arcurile lamelare 16. Datorită acestei legături, coroana şi ansamblul discurilor se deplasează axial împreună.
b
a
c

C.C.A. – Cutii de viteze
12
Figura 4.9 La deplasarea coroanei spre dreapta, discul conic 8 apasă pe contraconul 9, care este
solidar cu roata 10, şi care se presupune că are o viteză unghiulară diferită faţă de cea a coroanei. Datorită frecării dintre suprafeţele conice, se produce egalarea vitezelor unghiulare ale coroanei 6 şi roţii 10. Pentru ca deplasarea coroanei să fie permisă numai după egalarea vitezelor unghiulare ale coroanei 6 şi roţii 10, se folosesc bolţurile de blocare 5, prevăzute cu porţiunea conică 7. În cazul în care vitezele unghiulare nu sunt egale (figura 4.9,c), forţa de frecare dintre suprafeţele conului 8 şi a contraconului 9 produce o descentrare a bolţurilor 5 în raport cu orificiile din coroana 6, făcând imposibilă deplasarea mai departe a coroanei datorită conului de blocare 7, chiar dacă forţa axială depăşeşte forţa dispozitivului de fixare. La egalarea vitezelor unghiulare (figura 4.9,d), bolţul revine în poziţia iniţială sub acţiunea arcurilor dispozitivului de fixare şi a forţei F. În această situaţie, coroana 6 poate fi deplasată spre dreapta, conul de blocare 7 intrând în orificiul ei, deoarece bolţul 5 ocupă o poziţie concentrică faţă de orificiu. Prin deplasarea coroanei, dantura sa se va cupla cu dantura 12 şi în felul acesta se solidarizează la rotaţie roata 10 cu arborele secundar 11. Pentru eliminarea uleiului dintre suprafeţele de frecare, suprafaţa exterioară a discurilor conice 4 şi 8 este prevăzută cu un filet fin. În vederea realizării unei cuplări stabile, dantura interioară a manşonului 6, pe care culisează coroana 2 (figura 4.10), este împărţită în trei părţi 3, 4 şi 5, iar partea centrală (4) are o grosime mai mare. În felul acesta, pragul "x" evită autodecuplarea coroanei 2 de pe dantura 1.
Figura 4.10

C.C.A. – Cutii de viteze
13
Sincronizatorul cu servoefect. În figura 4.11 se reprezintă construcţia şi funcţionarea sincronizatorului cu servoefect
patentat de firma Porsche. Sincronizatorul serveşte la solidarizarea la rotaţie a pinioanelor 3 şi 10 cu arborele
canelat 4. Pinioanele sunt montate liber pe arbore prin intermediul rulmenţilor cu role 9, care au ca inel interior bucşele canelate 5. Fiecare pinion are fixat pe el câte o coroană dinţată 8, prevărută cu un butuc pe care se montează inelul elastic de sincronizare 2.
Figura 4.11 Acest inel este spintecat şi nu are grosimea uniformă. Inelele 15 menţin inelele de
sincronizare pe butucii pinioanelor. Manşonul 6 al sincronizatorului, montat pe canelurile arborelui 4, este prevăzut la partea interioară cu canelurile 14 iar la partea exterioară cu trei ghidaje 7. Pe aceste ghidaje poate culisa coroana dinţată 1 prevăzută în acest scop cu locaşurile 11.
Etapele de cuplare ale unei trepte cu ajutorul sincronizatorului cu servoefect sunt prezentate în figura 4.11,d.
În prima etapă, coroana dinţată 1, cu ajutorul furcii 13, se deplasează spre stânga, iar dantura sa interioară intră în contact cu suprafaţa conică a inelului de sincronizare. În etapa a doua, coroana culisantă este deplasată spre stânga, peste inelul de sincronizare, până se reazemă de partea frontală a danturii cu care se va cupla. La deplasarea coroanei, datorită faptului că ea are un diametru interior mai mic decât un diametru exterior al inelului spintecat, acesta este obligat să se închidă (să-şi apere capetele), apăsând asupra dinţilor coroanei. Sincronizarea se produce prin frecarea care apare între suprafaţa exterioară a inelului şi suprafaţa interioară (dantura) a coroanei. Sub acţiunea frecării, inelul este antrenat

C.C.A. – Cutii de viteze
14
de coroană până se va sprijini cu unul din capetele 12 în pragul 16, de pe butucul danturii 8. Datorită faptului că frecarea dintre inel şi dantura coroanei are tendinţa să deschidă inelul, apăsarea dintre această suprafaţă creşte ( figura 4.11,c), iar aceasta la rândul sau conduce la o mărire a forţelor de frecare şi deci la intensificarea procesului de sincronizare, în urma acestui servoefect. Tot datorită efectului servo nu mai este necesar un dispozitiv de blocare a coroanei, sincronizatorului Porsche fiind de tipul cu presiune constantă. În etapa a treia (după sincronizare), coroana cuplează cu dantura 8, iar inelul elastic 2 se destinde intrând în degajarea din partea centrală a coroanei, împiedicând în felul acesta decuplarea accidentală a treptei. Cuplarea treptelor cu ambreiaje polidisc. Cuplarea treptelor cu ajutorul ambreiajelor polidisc acţionate hidraulic se utilizează în special la cutiile de viteze hidromecanice. Solidarizarea la rotaţie a roţii 1 (figura 4.12) cu arborele 9 se face cu ajutorul ambreiajului polidisc ce cuprinde discurile 3 şi discurile 4. Discurile 3 sunt solidare la rotaţie cu carcasa roţii 1 şi pot fi deplasate axial pe canelurile acesteia. La rândul lor, discurile 4 sunt solidare la rotaţie cu arborele 9 tot prin intermediul unor caneluri, care le permite şi deplasarea axială. Forţa de apăsare dintre discuri este dată de către pârghiile 8, acţionate de mufa 7. În felul acesta, discurile sunt strânse între placa de presiune 2 şi contradiscul 5. Arcul 6 readuce placa de presiune în poziţia iniţială la decuplare. Cuplarea treptelor cu ambreiaje polidisc are loc fără zgomot şi şocuri, putându-se realiza chiar sub sarcină. În tabelul 4.1 sunt daţi timpii de cuplare ai treptelor pentru diferite elemente de cuplare. Tabelul 4.1
Tipul elementului de cuplare Timpul de cuplare [s] Mufă de cuplare simplă 2,5 Sincronizator 0,5...1 Ambreiaj polidisc 0,5
4.2.2. Organizarea generală a mecanismului reductor Mecanismele reductoare întâlnite la autovehicule pot avea doi sau trei arbori. Schimbătoarele de viteze cu doi arbori se utilizează la autoturisme, deoarece în general fiind organizate după soluţia totul în faţă sau totul în spate, intrarea şi ieşirea fluxului de putere se face pe aceeaşi parte, iar cele cu trei arbori la autovehiculele organizate după soluţia clasică (motorul dispus în faţă şi roţile motoare în spate), fiind necesare atât rapoarte de transmitere cât şi distanţe între axe mai mari.
Figura 4.12

C.C.A. – Cutii de viteze
15
A) Soluţii constructive pentru mecanismul reductor cu trei arbori
Schimbătoarele de viteze cu trei arbori cu trei, patru şi cinci trepte, sunt cele mai răspândite în construcţia de autovehicule (autoturisme, autocamioane şi autobuze).
Schimbătoarele de viteze cu trei trepte. Se utilizează aproape la toate autoturismele echipate cu motoare de capacitate
cilindrică mare, deoarece având o rezervă mare de putere nu necesită un număr mare de trepte.
Schema cinematică a unui astfel de schimbătorul de viteze este prezentată în figura 4.13, la care cuplarea treptelor se face prin deplasarea axială a roţilor 3 şi 5 montate prin caneluri pe arborele secundar S. După câte se observă arborele primar P primeşte mişcarea de la motor prin intermediul ambreiajului A. Prin intermediul angrenajului permanent (roata 1 şi 2), mişcarea ajunge la arborele intermediar I, de la care prin angrenajele 3,4 şi 5,6 se obţin treptele I şi II ale schimbătorului de viteze la arborele secundar.
Figura 4.13 A-ambreiajul; P-arborele primar; I-arborele intermediar; S-arborele secundar; 1 şi 2-roţile
dinţate ale ngrenajului permanent; 3 şi 4-roţile dinţate ale angrenajului treptei II; 5 şi 6-roţile dinţate ale angrenajului treptei I; 7, 8 şi 5-roţile dinţate ale angrenajelor treptei de mers înapoi.
Treapta III-a se obţine prin cuplarea directă a arborelul primar cu cel secundar,
realizând priza directă. În această situaţie, momentul de torsiune se transmite direct de la un arbore la celălalt. De aceea, când schimbătorul de viteze funcţionează în priza directă, practic, lipsesc pierderile datorită frecărilor din angrenaje, iar uzura pinioanelor este şi ea neglijabilă. De asemenea, în treapta de priză directă, schimbătorul de viteze funcţionează aproape fără zgomot. Treapta de mers înapoi se obţine prin cuplarea roţii 7 de pe axul MI cu roţile 5 şi 8.
A PAS
I
A
a
b

C.C.A. – Cutii de viteze
16
Rapoartele de transmitere ale tuturor treptelor de mers înainte, cu excepția prizei directe, se obțin cu ajutorul a două perechi de roți dințate. Rezultă astfel un schimbător de viteze compact, având distanța dintre axele arborilor relativ redusă. În schimb, datorită angrenării a două perechi de roți dințate, pierderile prin frecare în treptele respective sunt mai mari. În tabelul 4.2 este dat modul de cuplare a roților dințate pentru obținerea celor trei trepte ale schimbătorului de viteze din figura 4.13. Tabelul 4.2
Roțile dințate Nr. trepte 1 2 3 4 5 6 d1 d2
Raportul de transmitere
I x x x x 6
5
1
2
6
5
1
21 z
z
z
z
z
z
z
zicv =
−
−=
II x x x x 4
3
1
2
4
3
1
22 z
z
z
z
z
z
z
zicv =
−
−=
III x x 13 =cvi
În tabelul 4.3 sunt prezentate schemele cinematice ale schimbătoarelor de viteze cu
trei trepte de mers înainte, din care ultima treaptă este priza directă. Tabelul 4.3
Roțile dințate 7 (la unele soluții 5), 8, 9 și axul MI servesc la obținerea treptei de mers înapoi. Solidarizarea la rotație dintre roțile dințate și arborele secundar se realizează cu mufe de cuplare simple sau cu sincronizatoare. Roțile dințate care se află în angrenare permanentă sunt cu dinți înclinați.

C.C.A. – Cutii de viteze
17
Schimbătoarele de viteze cu patru trepte
Se întrebuințează, în general, la autoturisme și autoutilitare, iar schemele cinematice cele mai utilizate, după care acestea sunt organizate, sunt prezentate în tabelul 4.4. Tabelul 4.4
Schimbătoarele de viteze cu cinci trepte Schemele cinematice după care sunt organizate mecanismele reductoare de la schimbătoarele de viteze cu trei arbori și cinci trepte sunt prezentate în tabelul 4.5.
La aceste schimbătoare de viteze, treapta a V-a este treaptă de supraviteză (tabelul 4.5, a, b, c) sau priza directă (tabelul 4.5, d, e). În cazul în care treapta a V-a este de supraviteză, priza directă corespunde treptei a IV-a.

C.C.A. – Cutii de viteze
18
Tabelul 4.5
B) SCHIMBĂTOARELE DE VITEZE CU DOI ARBORI Schimbătoarele de viteze cu doi arbori se întâlnesc, mai ales, la autoturismele cu rezervă mică de putere care sunt dispuse, în general, într-un carter comun cu transmisia principală și cu diferențialul. În felul acesta se simplifică atât construcția schimbătorului de viteze cât și cea a transmisiei principale (se micșorează numărul arborilor și al lagărelor, etc.).
Momentul motor se transmite în toate treptele prin intermediul unui singur angrenaj de roți dințate rezultând un randament mai mare decât al schimbătorului cu trei arbori, pentru toate treptele. Datorită faptului că momentul motor în schimbătorul de viteze cu doi arbori se transmite numai printr-o pereche de pinioane, gama rapoartelor de transmitere este relativ mai redusă în comparație cu cea de la schimbătoarele de viteze cu trei arbori pentru aceeași distanță dintre arbori. Pentru mărirea gamei rapoartelor de transmitere, schimbătorul de viteze cu doi arbori se construiește uneori cu treapta superioară cu raportul de transmitere subunitar (acceleratoare), de obicei cuprins între 0,7 și 0,8. În figura 4.14 se reprezintă schema cinematică și de funcționare a unui schimbător de viteze cu doi arbori și patru trepte.
Fluxul de putere de la arborele ambreiajului 1 se transmite arborelui primar 2, care face corp comun cu roțile 4, 5, 6 și 8 aflate în angrenare permanentă cu roțile 9, 10, 11, și 13, libere pe arborele secundar 3.
Roțile dințate 7 și 12, precum și roata dințată 17 de pe axul 16 servesc la obținerea treptei de mers înapoi MI.
9 c a b
e d

C.C.A. – Cutii de viteze
19
Treptele de mers înainte se obțin prin intermediul elementelor de cuplare 14 și 15 de pe arborele secundar.
Figura 4.14
În tabelul 4.6 este dat modul de cuplare a roților dințate pentru obținerea celor patru trepte de mers înainte și a treptei de mers înapoi. Semnul minus arată că arborele secundar are sensul de rotație invers față de arborele primar. Tabelul 4.6
Roțile dințate Nr. treptei 4 5 6 7 8 9 10 11 12 13 17
Raportul de transmitere
I x x 4
91 z
zicv −=
II x x 5
101 z
zicv −=
III x 6
111 z
zicv −=
IV x x 8
131 z
zicv −=
M I x x x
−=
−
−=
7
12
17
12
7
17
z
z
z
z
z
ziMI

C.C.A. – Cutii de viteze
20
C) SOLUȚII CONSTRUCTIVE PENTRU TREAPTA DE MERS ÎNAPOI
Soluția constructivă pentru treapta de mers înapoi se alege în funcție de posibilitățile de realizare ale schimbătorului de viteze, precum și de raportul de transmitere necesar pentru obținerea unei forțe de tracțiune suficient de mare și a unei viteze reduse de deplasare a automobilului pentru a da posibilitatea unei manevrări corecte. La schimbătoarele de viteze cu trei trepte și cu cinci trepte ale autoturismelor, pentru obținerea treptei de mers înapoi se utilizează, în general, un pinion suplimentar 2 (figura 4.15,a), montat liber pe axul de mers înapoi MI, și aflat în angrenare permanentă cu ultimul pinion 1 al arborelui intermediar I, destinat în acest scop.
Figura 4.15 Pentru cuplarea treptei de mers înapoi se folosește roata dințată culisantă 3 de pe
arborele secundar S, care se utilizează și la obținerea treptei I. La deplasarea spre stânga (până angrenează cu roata dințată 4), se obține treapta I, iar la deplasarea spre dreapta, treapta de mers înapoi, când va angrena cu pinionul 2, care, la rândul lui, este în angrenare cu pinionul 1. Rezultă, deci, că, în acest caz, pentru treapta de mers înapoi nu trebuie prevăzută o furcă specială de cuplare. Avantajul soluției constă în simplitatea construcției. Raportul de transmitere al treptei de mers înapoi este:
( )1
3
2
3
1
2
z
zii
z
z
z
zi ppMI −=−
−
−=
unde: ip - este raportul de transmitere al angrenajului permanent dintre arborele primar și intermediar. Această variantă prezintă dezavantajele: necesitatea montării pe arborele intermediar a unui pinion suplimentar 1; micșorarea rigidității arborelui intermediar datorită pinionului suplimentar. La soluția prezentă în figura 4.15,b, pentru realizarea treptei de mers înapoi se utilizează blocul de roți dințate 2-4, montat pe axul MI. Treapta de mers înapoi se obține prin deplasarea spre dreapta a roții 3 până va angrena cu roata 4. În felul acesta, mișcarea se transmite de la arborele intermediar I prin roțile dințate 1,2,4 și 3 la arborele secundar S.

C.C.A. – Cutii de viteze
21
Pinionul 5 servește la realizarea primei trepte. Și în acet caz, cu furca corespunzătoare treptei I se cuplează și treapta pentru mersul înapoi.
Față de soluția precedentă, permite realizarea unui raport de transmitere mai mare datorită angrenajului dublu. Raportul de transmitere este dat de relația:
( )4
3
1
2
4
3
1
2
z
z
z
zi
z
z
z
zii ppMI −=
−
−−=
La cutiile de viteze cu patru trepte cu roți cu deplasare axială, pentru obținerea treptei de mers înapoi trebuie să se utilizeze o furcă specială prin intermediul căreia să se deplaseze blocul de roți dințate 2-4 de pe axul MI (figura 4.15,c). La deplasarea spre stânga a blocului de roți dințate 2-4, roata 4 va angrena cu roata 1 de pe arborele intermediar I, iar roata 2 cu roata 3 de pe arborele secundar S. Roțile dințate 3 și 1 servesc la obținerea treptei I a cutiei de viteze.
Datorită faptului că soluția nu necesită montarea pe arborele intermediar a unui pinion suplimentar, acesta se scurtează, iar rigiditatea crește. Prezintă însă dezavantajul că în același timp trebuie cuplate două perechi de roți dințate (2-3 și 1-4).
Raportul de transmitere este dat de relația:
( )2
41
2
1
1
4
z
zi
z
z
z
zii cvpMI −=
−
−−=
În figura 4.15,d se prezintă soluția la care pentru cuplarea treptei de mers înapoi se utilizează roata dințată 2 ce poate culisa pe axul MI. Deoarece roata dințată 1 este montată în dreptul roții dințate 3, corespunzător poziției neutre a acesteia, arborele intermediar I nu necesită o alungire suplimentară. Și la această soluție trebuie cuplate simultan două roți (1 și 3) la deplasarea spre stânga a roții 2.
Raportul de transmitere este dat de relația:
( )1
31
2
3
1
2
z
zi
z
z
z
zii cvpMI −=
−
−−=
Încărcarea axului pentru mersul înapoi depinde de poziția sa față de arborii P și S. În figura 4.16 se reprezintă două variante de dispunere a axului pentru mersul înapoi
MI, față de arborele intermediar și secundar.
Figura 4.16 Se constată că în cazul în care rezultanta R a forțelor de angrenare F caută să apropie
roțile (figura 4.16,b) încărcarea axului pentru mersul înapoi este mai redusă. Rezultanta R are valoarea cu atât mai redusă cu cât unghiul θ are o valoare mai mică. Micșorarea unghiului θ se obține prin îndepărtarea axului roții de mers înapoi de arborii intermediar și secundar.

C.C.A. – Cutii de viteze
22
4.3. Calculul schimbătoarelor de viteze mecanice
în trepte având arbori cu axe fixe
Calculul schimbătorelor de viteze mecanice (cutiilor de viteze) urmăreşte determinarea parametrilor acestora pentru obţinerea, din faza de proiectare, a unor calităţi dinamice şi economice optime pentru autovehiculul respectiv.
Calculul schimbătorelor de viteze cuprinde urmãtoarele etape de calcul: determinarea mărimii rapoartelor de transmitere ale transmisiei, alegerea schemei de organizare, dimensionarea şi verificarea angrenajelor, calculul arborilor, calculul pentru alegerea rulmenţilor.
4.3.1. Determinarea mãrimii rapoartelor de transmitere ale transmisiei
Rezistenţele la înaintare ale autovehiculului sunt diferite pe parcursul deplasării autovehiculului, ele depinzând de o multitudine de factori, cum sunt: viteza de deplasare, starea de încărcare, calitaţile şi geometria căii de rulare. Toate acestea conduc la modificarea rezistenţelor la înaintare într-o plajă foarte largă de valori, rezistenţe care trebuie învinse de forţa de tracţiune dezvoltată la roţile motoare ale autovehiculului.
În funcţie de soluţia constructivă adoptată pentru autovehiculul de proiectat, transmisia este formată din următoarele subansambluri cu raport de transmitere: - schimbătorul de viteze C.V - cu raportul de transmitere al unei trepte icvk; - reductorul-distribuitor R.D (la autovehicule cu tracţiune integrală, la autobuze, autocamioane având reductor distribuitor) - cu raportul iR; - transmisia principală T.P - cu raportul i0;
Determinarea mărimii rapoartelor de transmitere ale transmisiei, se efectuează la calculul dinamic al autovehiculului şi anume la calculul de tracţiune, iar în tabelul 4.7 sunt redate sintetic etapele de calcul pentru acestea, cu recomandările aferente.

C.C.A. – Cutii de viteze
23
Tabelul 4.7
Elementul de calcul Relaţii de calcul. Recomandări.
1 2
Determinarea raportului transmisiei principale i0
Se determină din condiţia ca autovehiculul să atingă viteza maximă la turaţia maximă a motorului, presupunând că schimbătorul de viteze este cuplat în treapta de raport 1, şi se
determină cu relaţia: max
max0 30 v
rni d⋅
⋅=
π, în care:
nmax-turaţia maximă a motorulu [rot/min]; rd - raza dinamică a roţii [m]; vmax-viteza maximă de deplasare a autovehiculului, [m/s].
Determinarea raportului de transmitere în treapta I, iCV1.
Aceasta se determină punând condiţia ca forţa la roată în treapta I, să depăşească forţa rezistentă la urcarea pantei maxime αmax, cu sarcină maximă, dar să nu depăşească forţa de aderenţă:
max01
max0 Mi
Gri
Mi
Gr
tr
addCV
tr
ad
⋅⋅⋅⋅
≤≤⋅⋅
⋅⋅η
ϕη
ψ,
în care: Ga-este greutatea totală a autovehiculului; ψ-coeficientul rezistenţei specifice a căii de rulare; i0 - raportul transmisiei principale; ηtr-randamentul transmisiei; Mmax-momentul maxim al motorului; Gad-greutatea aderentă; ϕ-coeficientul de aderenţă al roţior.
Determinarea raportului de transmitere pentru ultima treaptă a schimbătorului de viteze, CVki
max0
max
30 vi
rni dCVk ⋅
⋅⋅
=π ,
în care: nmax - este turaţia puterii maxime, în [rot/min], (pentru MAC-uri se ia în calcul turaţia de regulator, nr);
Determinarea numărului minim de trepte ale schimbătorului de viteze, kmin.
Pentru cutiile de viteze etajate în progresie geometrică calculul numărului minim de trepte se face cu relaţia:
M
P
CVk
CV
n
ni
i
klg
lg
1
1
min += ,
în care: nP - este turaţia de putere maximă; nM - turaţia momentului maxim; iCV1 - raportul de transmitere în treapta I a CV; iCVk - raportul de transmitere în ultima treaptă a CV. Valoarea rezultată din calcul se rotunjeşte la un număr întreg, k, imediat apropiat, care va reprezenta numărul treptelor de viteze adoptat (minim necesar).

C.C.A. – Cutii de viteze
24
Tabelul 4.7 (continuare)
1 2
Determinarea raţiei de etajare
Pentru etajare în progresie geometrică, raţia se determină cu
relaţia: 11−= k
CVk
CV
i
ir .
Determinarea rapoartelor de transmitere intermediare ale schimbătorului de viteze
Se face cu relaţiile:
;i ; ... ;i ;212
1-CVk212
CV31
2 −− =====
kCVCVkCVCVCV
CV r
i
r
i
r
i
r
i
r
ii
Determinarea raportului de transmitere pentru mersul înapoi
Pentru obţinerea unei forţe de tracţiune suficient de mare şi a unei viteze reduse de deplasare pentru mersul înapoi, cu posibilitatea unei manevrări în siguranţă a autovehiculului se recomandă:
IMI=(0,8 ... 1,3)iCV1
Verificarea etajării schimbătorului de viteze
Verificarea etajării cutiei de viteze se face prin trasarea diagramei ferăstrău teoretice, adică a dependenţei dintre turaţie şi viteză, determinată cu relaţia:
( )cvk
dk ii
rnnv
⋅⋅⋅=
030
π, în care:
rd - este raza dinamică a roţii, [m];
n - turaţia motorului, [rot/min];
iCVk - raportul de transmitere al CV în treapta k;
i0 - raportul transmisiei principale.
Observaţie: zona de funcţionare stabilă a motorului corespunde intervalului de turaţii [nM, nP] pentru MAS-uri, şi [nM, nR], pentru MAC-uri (motoare prevăzute cu regulator);
Adoptarea unor rapoarte suplimentare
Din considerente economice, la unele autovehicule se folosesc schimbătoare de viteze la care 1…2 treapte sunt cu raport subunitar (trepte de supraviteză), iar la acestea priza directă este realizată în treapta imediat inferioară acestora.
Pentru treptele de supraviteză se adoptă o valoare cuprinsă între 0,7 şi 0,8.

C.C.A. – Cutii de viteze
25
4.3.2. Alegerea schemei de organizare a schimbătorului de viteze
Alegerea schemei de organizare se face pe baza rezultatelor obţinute la calculul de tracţiune în cadrul căruia s-a efectuat etajarea schimbătorului de viteze. Cunoscându-se numărul de trepte, trebuie aleasă soluţia de cuplare pentru fiecare treaptă, ţinând seama de tipul autovehiculului pentru care se proiectează schimbãtorul de viteze. În prezent, sunt răspândite la autocamioane şi autobuze schimbătoarele de viteze care utilizează pentru treptele inferioare soluţia cu roţi dinţate cu deplasare axială sau cu roţi dinţate permanent angrenate şi mufe de cuplare, iar pentru treptele superioare soluţia de cuplare a treptelor cu mufe de cuplare sau cu sincronizatoare. La autoturismele moderne, se utilizează soluţia de cuplare cu sincronizatoare la toate treptele pentru mersul înainte, iar pentru treapta de mers înapoi M.I. şi uneori pentru prima treapă, se utilizează varianta de cuplare cu roţi dinţate cu deplasare axială, impusă de preţul de cost scăzut şi de timpul de utilizare al acestora.
Pentru definitivarea schemei de organizare, tot în această fază se face alegerea poziţiei roţilor dinţate faţă de lagărele arborilor (figura 4.17), motiv pentru care este necesar să se adopte, iniţial prin comparaţie cu realizări similare existente, următoarele elemente: lăţimea roţilor dinţate b, lăţimea sincronizatoarelor ls, lăţimea lagărelor B, distanţele dintre roţile dinţate şi jocul dintre roţile dinţate j. Relaţiile şi recomandările pentru calculul elementelor necesare la definitivarea schemei de organizare sunt indicate în tabelul 4.8.
Figura 4.17
Tabelul 4.8
Elementele de calcul
Relaţiile de calcul. Recomandări
Distanţa dintre axele arborilor C
Pentru autoturisme: [ ]mm 263MMA =
Pentru autocamioane şi autobuze: [ ]mm 403MMA = , în care:
MM-este momentul motor maxim, în daNm Observaţie: Distanţa A se definitivează la calculul roţilor dinţate
Distanţele dintre carter şi roţile dinţate şi dintre roţi l1 ... l5
222,1
11
bj
Bl ++= ;
224,3
322,1
2
bjj
bl +++= ;
226,5
44,3
3
bj
bl ++= ;
224,3
78,766,556,5
4
bjbjbj
bl ++++++= ;
22 88,7
5
Bj
bl ++= .
Lăţimea lagărelor (B), jocurile dintre roţile dinţate şi carter sau dintre roţi (j1 ... j7), lăţimea perechilor de roţi dinţate (b1,2 ... b7,8) şi lăţimea
A
A

C.C.A. – Cutii de viteze
26
sincronizatoarelor (ls) se adoptă constructiv.
Greutatea schimbătorului de viteze GCV
3AaGCV ⋅= [N], în care:
A-distanţa dintre arbori; a - coeficient ce ţine seama de tipul cutiei de viteze). Se consideră: - pentru autoturisme a=0,064X10-2 N/mm3, în cazul cutiilor de viteze cu trei arbori şi a=0,084X10-2 N/mm3, în cazul cutiilor cu doi arbori; - pentru autocamioane a=0,040 X10-2 N/mm3 pentru cutiile de viteze cu patru trepte şi a=0,045 X10-2 N/mm3 în cazul cutiilor cu cinci trepte. Observaţie: În general, cutiilor de viteze (împreună cu carterul ambreiajului) reprezintă 2-3% din greutatea autoturismului şi 2,5-5% din greutatea şasiului autocamionului cu motorul nealimentat.
4.3.3. Calculul de dimensionare şi verificare a angrenajelor de roţi dinţate
Calculul de dimensionare şi verificare a angrenajelor de roţi dinţate presupune parcurgerea următoarelor etape: - dimensionara geometrico - cinematică a angrenajelor; - calculul de rezistenţă al danturii.
Dimensionarea geometrico - cinematică a angrenajelor. Această etapă cuprinde: predimensionarea modulului danturii şi determinarea distanţei
între axe, determinarea numărului de dinţi ai roţilor şi definitivarea rapoartelor de transmitere ale angrenajele ce compun cutia de viteze, determinarea elementelor geometrice ale roţilor.
Pentru alegerea modulului se utilizează fie calculul acestuia cu relația m=25,4/DP, fie determinarea prealabilă cu ajutorul graficului prezentat în figura 4.18. În primul caz “DP” reprezintă diametrul pitch, care se determină cu ajutorul tabelului 4.15, în funcţie de tipul autovehiculului şi valoarea momentului motor.
Tabelul 4.18 Diametrul pitch (DP)
Tipul autovehiculului
Momentul motor mN ⋅ Dantură dreaptă
Dantură înclinată*
Autoturismului - până la 166 - 173...276 - peste 276
10 8 8
12 12 10
Autocamioane
- până la 276 - 276...246 - 346...415 - peste 415
7 6 6 5
8 7 6 6
În cazul utilizării graficului din figura 4.18, modulul normal se determină cunoscând valoarea momentului maxim al arborelui secundar Ms determinat cu relaţia: (Ms=Mmax.iCV1.ηCV), în care: iCV1- este raportul de transmitere în treapta întâi; ηCV - randamentul transmisiei de la ambreiaj până la aborele secundar, ηCV=0,95…0,97.
Pentru o valoare a momentului de calcul determinat, diagrama oferă un şir de valori posibile ale modulului normal. Valorile spre limita inferioară se vor alege la cutiile de viteze de autoturisme, unde se impun dimensiuni de gabarit cât mai mici şi funcţionare cât mai silenţioasă, iar valorile superioare (datorită capacităţii mărite de încărcare a dinţilor) se vor alege pentru automobilele ce funcţionează în condiţii grele de exploatare.

C.C.A. – Cutii de viteze
27
Figura 4.18 Valoarea aleasă pentru modulul normal trebuie să se regăsească în şirul de valori
normalizate în STAS 821-82 pentru modulele normale ale roţilor cilindrice. Valoarea definitivă a modulului se va stabili pe baza unui calcul de verificare a danturii.
Determinarea distanţei dintre axe şi a numărului de dinţi ai roţilor dinţate se face ţinând seama de:
- realizarea, pe cât posibil, a rapoartelor de transmitere determinate din condiţiile de conlucrare motor-transmisie, având în vedere faptul că roţile dinţate au un număr întreg de dinţi;
- obţinerea dimensiunilor minime de gabarit prin alegerea, pentru roata cu cel mai mic diametru, a numărului minim de dinţi admisibil.
La roţile dinţate cu profil în evolventă şi unghiul de angrenare α=20o, se recomandă: - zmin=14 dinţi pentru dantură corectată; - zmin=17 dinţi pentru dantură necorectată. Pentru determinarea distanţei dintre
axe şi a numărului de dinţi, în figura 4.19 se prezintă o schemă cinematică simplificată a unei cutii de viteze cu trei arbori.
Un raport de transmitere al cutiei iCVk este alcătuită din două rapoarte de transmitere iCVk = ip x ik, unde ik este raportul de transmitere al angrenajului de roţi zk, z’k, dispuse pe arborii intermediar ai şi secundar as, pentru realizarea treptei k, iar ip raportul de transmitere al angenajului permanent format din roţile dinţate zp, şi z`p dintre arborele primar ap şi arborele intermediar ai;.
Constructiv, obţinerea distanţei minime dintre axe este posibilă când pentru raportul
de transmitere al angrenajului permanent se adoptă valoarea 1CVp ii = , unde iCV1 este
raportul de transmitere al cutiei de viteze în prima treaptă. În aceste condiţii, cea mai mică roată este pinionul conducător al angrenajului
permanent, zp. Pentru roata zp valoarea minimă a numărului de dinţi este:
14cos17 3
min ≥= γpz
Cunoscând raportul de transmitere al angrenajului permanent se poate determina numărul de dinţi z`p ai roţii conduse de pe arborele intermediar:
Z/p
Zp
A
ss
ai
ap
Zk
Z/k
Z/
1
Z1
Figura 4.19

C.C.A. – Cutii de viteze
28
pp'p izz ⋅=
Distanţa între axe A se stabileşte ţinând cont de numărul de dinţi al roţilor pentru angrenajul permanent şi de modul cu relaţia:
( )p
'pp
cos2
zzmA
γ⋅+⋅
= , sau ( )
p
pp
cos2
i1zmA
γ⋅+⋅⋅
=
unde: m - este modulul normal; γp- unghiul de înclinare al danturii angrenajului permanent.
Ţinând seama de faptul că distanţa între arbori este egală pentru toate angrenajele cutiei de viteze se poate scrie:
( ) ( ) ( )k
kk
1
11
p
pp
cos2
i1zm...
cos2
i1zm
cos2
i1zmA
γγγ ⋅+⋅⋅==
⋅+⋅⋅=
⋅+⋅⋅
=
de unde: zp, z1,…,zk reprezintă numărul de dinţi al roţilor de pe arborele intermediar.
Din relaţia anterioară se obţine:
( ) ( )k
kk
1
11 i1m
cosA2z;...;
i1m
cosA2z
+⋅⋅=
+⋅⋅= γγ
în care: γ1……γk reprezintă unghiurile de înclinare ale dinţilor roţilor dinţate ale angrenajelor succesive 1...k dintre arborii intermediar şi secundar pentru realizarea treptelor de viteză.
Având determinat numărul de dinţi al roţilor de pe arborele intermediar cunoscând rapoartele de transmitere, se determină numărul de dinţi al roţilor de pe arborele secundar:
( ) ( )k
kkk
1
111 i1
i
m
cosA2z;...;
i1
i
m
cosA2z
+⋅⋅=′
+⋅⋅=′ γγ
Ţinând seama de faptul că numerele de dinţi trebuie să fie întregi, valorile date de aceste relaţii se rotunjesc la numere întregi, astfel încât rapoartele de transmitere să se apropie cât mai mult de valorile determinate prin calculul de tracţiune. Ca urmare a rotunjirii la numere întregi a numerelor de dinţi ai roţilor ce formează angrenajele schimbătorului de viteze, distanţa între axe se modifică pentru fiecare angrenaj.
Păstrarea neschimbată a distanţei între axe în urma rotunjirii numărului de dinţi se face prin două metode şi anume: prin deplasarea profilului, sau prin corijarea unghiului de înclinare al danturii.
Prin deplasarea profilului se obţine, în afara realizării distanţei între axe impuse, o sporire a capacităţii portante la încovoiere a danturii şi la presiunea de contact a flancurilor, respectiv creşterea gradului de acoperire al angrenajului.
Corijarea unghiului de înclinare al danturii se face cu relaţia:
mA2
zzcos
/krkr ⋅+=γ
La alegerea înclinării danturii roţilor, pentru obţinerea unor încărcări cât mai mici
axiale pentru arborele intermediar se va avea în vedere şi relaţia: k
p
k
p
r
r
tg
tg=
γγ
, referitoare la
descărcarea arborelui intermediar de forţe axiale.

C.C.A. – Cutii de viteze
29
Pentru roţile dinţate ale cutiilor de viteze cu doi arbori, procedând după metodologia de mai înainte numerele de dinţi ale roţilor de pe arborele primar sunt date de relaţia:
( )CVk
kk im
Az
+⋅⋅
=1
cos2 γ
, iar, pentru arborele secundar:
( )CVk
CVkkk im
iAz
+⋅⋅⋅
=′1
cos2 γ
unde: iCVk este raportul de transmitere al treptei k de viteză. La cutiile de viteze cu trei arbori şi treaptă de suprapriză, cea mai mică roată este roata
de pe arborele secundar, a angrenajului treptei de suprapriză. În acest caz, determinarea distanţei dintre axe se face prin adoptarea pentru această roată a numărului minim de dinţi.
Cunoscând modulul normal, unghiul de înclinare a danturii şi numărul de dinţi, se pot determina elementele geometrice ale roţilor dinţate şi ale angrenajelor.
Calculul geometric şi cinematic al agrenajelor cilindrice exterioare cu axe paralele, având danturi înclinate cu profil în evolventă, se efectuează conform STAS 12223-84.
4.3.4. Calculul arborilor schimbătoarelor de viteze
Arborii schimbătoarelor de viteze sunt solicitați la încovoiere și răsucire, rezultând deformații elastice de încovoiere și răsucire, care, dacă depășesc limitele admisibile, conduc la o angrenare necorespunzătoare (modifică legile angrenării și reduc gradul de acoperire). De aceea, în majoritatea cazurilor, dimensionarea arborilor se face după considerente de rigiditate și nu de rezistență. Trebuie arătat că, în exploatarea autovehiculelor, nu se constată deteriorarea arborilor datorită oboselii materialului.
Calculul arborilor schimbătoarelor de viteze cuprinde: determinarea schemei de încărcare a arborilor, calculul reacțiunilor din lagăre, calculul momentelor încovoietoare și de torsiune, determinarea diametrului și verificarea la rigiditate.
Determinarea schemei de încărcare a arborilor și calculul reacțiunilor din lagăre Încărcările arborilor schimbătoarelor de viteze sunt determinate de forțele din
angrenajele roților dințate. Aceste forțe dau naștere la reacțiuni corespunzătoare în lagărele arborilor, a căror determinare este necesară atât pentru calculul de rezistență al arborilor cât și pentru calculul de alegere al rulmenților. În fiecare angrenaj acționează o forță tangențială Ft, una radială Fr și una axială Fa (în cazul roților cu dinți drepți γ=0 și Fa=0), ale căror valori
sunt date de relațiile: γγ
αtgFF
tgFF
r
iMF tatr
d
iMt === ;
cos ;
în care: ii - este raportul de transmitere de la motor la roata pentru care se determină forțele; α - unghiul de angrenare; γ - unghiul de înclinare a danturii; rd - raza cercului de divizare al roții.

C.C.A. – Cutii de viteze
30
În figura 4.20 se reprezintă schemele de încărcare pentru arborii schimbătoarelor de
viteze cu trei arbori și cu doi arbori în cazul obținerii treptei de viteze i. Ținând seama de faptul că asupra arborilor acționează forțe în plane diferite, pentru ușurarea calculelor, aceste forțe se descompun în componente conținute în planul format din axele arborilor secundar (respectiv primar) și intermediar și în componente perpendiculare pe acest plan. În mod obișnuit, planul format din axele arborilor schimbătorului de viteze este un plan vertical, motiv pentru care forțele se descompun în componente verticale și orizontale.
La stabilirea reacțiunilor, se consideră arborele în echilibru static sub acțiunea forțelor Ft, Fr, și Fa. Sensul forței axiale Fa depinde de unghiul de înclinare al dinților roții și deci, în unele cazuri, poate fi invers sensului din figură. Pentru roțile dințate cu dinți drepți Fa=0.
Datorită faptului că la schimbarea treptelor de viteze se modifică atât forțele, cât și poziția roților active în raport cu reazemele, se schimbă și reacțiunile în lagăre, ceea ce impune ca determinarea lor să se facă pentru fiecare caz în parte, funcție de particularitățile constructive ale schimbătorului de viteze.
În cazul schimbătorului de viteze cu trei arbori, arborele secundar este solicitat de forțele care iau naștere într-un singur angrenaj, datorită faptului că în timpul cât schimbătorul de viteze se află într-o treaptă oarecare, momentul este transmis numai unei roți dințate de pe acest arbore. În schimb, arborele intermediar este solicitat în același timp de forțele care iau naștere în angrenajul permanent (care rămân neschimbate, indiferent de treaptă) și de forțele care apar în angrenajul dintre una din roțile arborelui intermediar cu roata corespunzătoare de pe arborele secundar. Arborele primar este solicitat de forțele din angrenajul permanent (care nu depind de treapta de viteză) și de reacțiunea Rc a lagărului anterior al arborelui secundar (care diferă de la o treaptă de viteză la alta). La cutia de viteze cu doi arbori, arborele primar este solicitat de forțele care apar într-un singur angrenaj, iar arborele secundar de forțele care apar în angrenajul cu roata de pe arborele primar și de forțele din pinionul transmisiei principale. În tabelul 4.19 și 4.20 sunt date schemele de încărcare a arborilor și relațiile pentru calculul reacțiunilor pentru schimbătoarele de viteze cu trei, respectiv cu doi arbori.
Figura 4.20
C
Ft
l5
L2
l6
Fa
RDA RDV
RAH RAV
RBA
RCV
RC
A
i
F/ti
D
B Fri
RBV
RBH
l1
r di
F/ri
l4
l2
L1
Fti
F/a
Fai
r/ di
i /
RDH
r dm
Fr
l6
l3 l2 l1 l4
L2 L1
l5
L3
l8 l7
REV
A
RDV RAV RCV RBH
RFV
RAH
RCH
REH
RDH
RDA
RFH
F/tp
Fap
F/rp Ftp
Frp
RBV
RBA
F/ri
F/ai
Fti Fai
Fri
F/t i
r/ dp
r dp RCH
r/ di
r di
B
E
C D
F

C.C.A. – Cutii de viteze
31
Tabelul 4.19
Arborele Schema de încărcare a arborelui Relații pentru calculul reacțiunilor
Secundar de la cutiile de viteze cu trei arbori
2
5
L
lFR ti
CH =
2
5
L
rFlFR diairi
CV−
=
22CVCHC RRR +=
2
4
L
lFR ti
DH =
2
4
L
rFlFR diairi
DV+
=
aiDA FR = 222DADVDHD RRRR ++=
Primar de la cutiile de viteze cu trei arbori
1
21
l
lFLRR tpCH
AH
−=
1
12
l
LRrFlFR CVdpaprp
AV
+−=
22AVAHA RRR +=
( ) ( )1
2111
l
llFlLRR tpCH
BH
+−+=
( ) ( )1
1121
l
lLRrFllFR CVdpaprp
BV
++−+=
apBA FR = 222BABVBHB RRRR ++=
Intermediar de la cutiile de viteze cu trei arbori
( )3
8'
87'
L
lFllFR titp
EH
−+=
( )3
''8
'''87
'
L
rFlFrFllFR diairidpaprp
EV
++−+=
22EVEHE RRR +=
( )3
8'
76'
L
lFllFR tpti
FH
−+=
( )3
6'''''
76'
L
lFrFrFllFR rpdpapdiairi
FV
++−+=
''apaiFA FFR −=
222FAFVFHF RRRR ++=

C.C.A. – Cutii de viteze
32
Tabelul 4.20
Arborele Schema de încărcare a arborelui Relații pentru calculul reacțiunilor
Primar de la cutia de viteze cu doi arbori
1
2
L
lFR ti
AH =
1
2
L
rFlFR diairi
AV+
=
22AVAHA RRR +=
1
1
L
lFR ti
BH =
1
1
L
rFlFR diairi
BV−
=
aiBA FR = 222BABVBHB RRRR ++=
Secundar de la cutia de viteze cu doi arbori
( )2
325'
L
lLFlFR tti
CH+−
=
( )2
''325
'
L
rFrFlLFlFR diaidmarri
CV−+++
=
22CVCHC RRR +=
2
34'
L
lFlFR tti
DH+
=
2
3''
4'
L
rFlFrFlFR dmatdiairi
DV−−+
=
'aiaDA FFR −=
222DADVDHD RRRR ++=
Calculul arborilor la încovoiere și torsiune Cunoscând reacțiunile din lagăre Rv și Rh și distanțele dintre roțile dințate și lagăre, se
determină momentele de încovoiere MiV, MiH și 2IH
2iVi MMM += , într-o secțiune
oarecare. În general, pentru arborii schimbătorului de viteze, solicitați la încovoiere și torsiune,
tensiunea echivalentă se determină după ipoteza a III-a de rupere (a tensiunii tangențiale maxime) cu relația:
22 4 tiech τσσ +=
în care: iσ - este tensiunea de încovoiere iii W/M=σ ; tτ - este tensiunea de torsiune:
ttt W/M=τ ; Mi- momentul încovoietor rezultant: 2IH
2iVi MMM += ; Wi - modulul de
rezistență la încovoiere; Mt- momentul de torsiune: iMt iMM = ; ii - raportul de transmitere
dintre motor și arborele care se calculează; Wt- modulul de rezistență la torsiune. Dacă în relația tensiunii echivalente se înlocuiesc tensiunile iσ și tτ și dacă se ține
seama de faptul că: Wt=2 Wi, rezultă:

C.C.A. – Cutii de viteze
33
ait
2t
2i
ech W
MMσσ ≤
+=
În cazul în care calculul se efectuează pe baza ipotezei a doua de rupere (ipoteza deformației maxime de întindere), dimensionarea arborilor se face cu formula:
3
ai
idnec d1,0
MW ≈=
σ
în care: Mid (momentul ideal) este un moment fictiv ce ține seama atât de momentul încovoietor Mi cât și de momentul de torsiune Mt, fiind dat de relația:
2t
2iiid MM65,0M35,0M ++=
La calculul arborilor se stabilesc momentele Mi și M t pentru fiecare treaptă a schimbătorului de viteze, luându-se în considerație situația cea mai dezavantajoasă.
Predimensionarea arborilor schimbătorului de viteze se face din condiția de rezistență pentru care:
ai
2t
2i
nec
MMW
σ+
=
În scopul asigurării unei rigidități suficiente, tensiunea admisibilă se alege după cum urmează:
- pentru arborele primar: σe/σai= 7...10; - pentru arborele intermediar și arborele secundar: σe/σai=5...7, în care σe este
tensiunea corespunzătoare limitei de elasticitate. Valorile mai ridicate se adoptă la arborii cu lungime mai mare. Ținând seama de faptul că arborele secundar este canelat, se alege un arbore care să
aibe diametrul interior mai mare sau egal cu cel rezultat din calculul diametrului minim, folosid relațiile și recomandările de mai sus. Apoi, din STAS se aleg celelalte dimensiuni ale canelurilor, după care se face calculul de verificare la strivire și forfecare a acestora.
Verificarea rigidității la încovoiere a arborilor. După cum s-a arătat, solicitările la încovoiere și răsucire ale arborilor dau naștere la
deformații elastice. Aceste deformații, în special cele datorate încovoierii, dacă depășesc anumite valori admisibile, conduc la angrenare necorespunzătoare, iar solicitările danturii cresc. De asemenea, datorită deformației arborilor, polul de angrenare, oscilând în jurul poziției teoretice, determină o mișcare neuniformă a arborelui condus, fapt ce contribuie la o funcționare zgomotoasă.
Figura 4.21 În figura 4.21,a se reprezintă schematic angrenarea a două roți dințate în situația în
care nu se transmite un moment de torsiune. Dacă prin angrenaj se transmite un moment de torsiune, sub acțiunea forțelor care iau naștere arborii se deformează, iar angrenarea nu mai este corespunzătoare (figura 4.21,b). În cazul în care roțile dințate nu sunt dispuse la mijlocul arborilor, fiind deplasate spre unul din capetele (figura 4.21,c), cu toate că săgeata arborilor se

C.C.A. – Cutii de viteze
34
va micșora (pentru aceleași solicitări), angrenarea nu este corespunzătoare din cauza deformării secțiunii arborilor.
Durata de funcționare și lipsa zgomotului în angrenajele cu roți dințate ale schimbătoarelor de viteze depind de mărimea săgeților arborilor din planul de dispunere a roților dințate și de mărimea răsucirii secțiunilor respective.
Calculul deformațiilor arborilor solicitați la încovoiere se face cu relațiile din tabelul 4.21.
Tabelul 4.21
Schema de încărcare a grinzii Formula fibrei medii
deformate. Săgeata în dreptul sarcinii.
Porţiunea Numărul formulei
( )xbxlxlE
bFy 223
6−+−
⋅⋅⋅=
( )
+−+⋅−
⋅⋅= 3
3
6ax
l
xb
lE
Fy
( )
−+ 22 bll
bx
lEl
baFy
⋅⋅⋅⋅⋅=
3
22
De la A la 1 De la 1 la B În punctul 1
I
II
III
−−⋅−
⋅⋅= alx
l
xa
lE
Fy
3
6
( )( ) ( )
−−++ 22
3
bll
lxla
−
⋅⋅⋅⋅= x
l
x
lE
laFy
2
3
6
( )3
3
1aal
lE
Fy
⋅+⋅⋅
=
De la A la 1 De la A la B În punctul 1
( )
−+−⋅⋅
=l
lx
l
xlx
lE
My
33
6
−
⋅⋅=
l
xlx
lE
My
3
6
( )axlE
My 32
6+
⋅⋅=
De la A la 1 De la A la B În punctul 1
−−−
⋅⋅= x
l
ala
l
x
lE
My
23
3
22
32
( )
−−−
⋅⋅= 2
3
32ax
l
x
lE
My
−−− x
l
ala
2
3
22
( )l
aalla
lE
My 32
322 −+
⋅⋅=
De la A la 1 De la 1 la B În punctul 1
Săgeata totală a arborelui, în locul de dispunere a roții dințate, se determină cu relația:
2H
2v fff +=

C.C.A. – Cutii de viteze
35
În cazul schimbătoarelor de viteze, săgeata totală admisibilă a arborelui (în planul de dispunere a roților), considerând încărcarea corespunzătoare momentului motor maxim, este:
f=0,13-0,15 mm pentru treptele superioare; f=0,15-0,25 mm pentru treptele inferioare. Răsucirea planurilor roților dințate la încovoierea arborelui trebuie să nu depășească
0,001-0,002 rad. Trebuie subliniat faptul că roțile dințate cu dinți înclinați sunt mai sensibile la
deformațiile arborilor, decât cele cu dinți drepți. În cazul în care asupra arborelui acționează două sau mai multe forțe, săgețile totale,
în fiecare plan, se calculează ca suma algebrică (într-o anumită secțiune) a sãgeților rezultate sub acțiunea forțelor luate individual. În figura 4.22 se consideră cazul a două forțe. În practică, interesează în mod deosebit săgețile în dreptul forțelor (roților).
În dreptul forței F1 săgeata arborelui va fi y1=yF1+ yF2 (yF1 este săgeata datorită forței F1, iar yF2 este săgeata datorită forței F2 și se determină cu relația III din tabelul 4.21).
4.3.5. Calculul pentru alegerea rulmenților
În general, arborii transmisiei automobilului se sprijină pe rulmenți, cei mai răspândiți fiind rulmenții radiali cu bile ce pot prelua și o anumită sarcină axială. Acești rulmenți sunt mai ieftini au un randament ridicat, se montează ușor și nu necesită reglaje în procesul exploatării.
Rulmenții cu role cilindrice se utilizează în cazul în care distanța dintre axe este redusă, iar rulmenții radiali cu bile, de aceleași dimensiuni, nu pot prelua sarcinile respective. Rulmenții cu role conice pot prelua sarcini radiale și axiale mari, dar sunt mai scumpi și necesită reglaje în timpul exploatării.
Rulmenții se aleg din cataloage în funcție de capacitatea de încărcare dinamică. Dependența dintre capacitatea de încărcare dinamică și durata de funcționare a rulmenților este dată de relația:
[ ]N DQCp=
în care: D-este durata de funcționare, în milioane de rotații; Q-sarcina echivalentă, în N; C-capacitatea de încărcare dinamică, în N; p-exponent ce depinde de tipul rulmentului (p=3 pentru rulmenți cu bile; p=10/3=3,33 pentru rulmenți cu role).
Durabilitatea D, în milioane de rotații, se poate exprima cu relația:
6h
10
nD60D =
în care: Dh este durata de funcționare, în ore; n-turația inelului rulmentului, în rot/min. Relațiile de mai sus sunt valabile pentru rulmenții care lucrează la sarcină și turație
constante. În cazul transmisiei automobilului, deci și al schimbătorului de viteze, rulmenții
funcționează într-un regim nestaționar, cu sarcini și turații variabile, și anume: cu sarcina echivalentă Q1 [N], la turația n1 [rot/min] și durata Dh1 [h]; cu sarcina echivalentă Q2 [N], la turația n2 [rot/min] și durata Dh2 [h]; … ; cu sarcina echivalentă Qn [N], la turația nn [rot/min] și durata Dhn [h].
Figura 4.22

C.C.A. – Cutii de viteze
36
Capacitatea de încărcare, în acest caz, se determină cu relația:
DQC pem=
în care: Qem- este sarcina echivalentă medie; 6echh
10
60nDD ⋅⋅=
Prin sarcină echivalentă medie se înțelege încărcarea, care acționând asupra rulmentului Dh=h1+ h2+...+hn la turația echivalentă nech, are același efect asupra lui, ca și exploatarea în regimul staționar.
Astfel, considerând condiția:
∑∑ ==
,hnQhnQ iipi
n
1iiech
pem
rezultă valoarea sarcinii echivalente medii:
( )p/1n
1i
piii
p/1pnnn
p222
p111em QQ....QQQ
=+++= ∑=
βαβαβαβα
în care: iα - este raportul dintre timpul hi de funcționare a rulmentului în treapta de
ordinul i, și timpul total de funcționare Dh:
h
nn
h
ii
h
12
h
11 D
h,...,
D
h,...,
D
h,
D
h ==== αααα iar ∑=
=n
1ii 1α (4.104)
iβ - raportul între turația n, corespunzătoare unui anumit regim și turația echivalentă nech:
ech
n1n
ech
ii
ech
22
ech
11 n
n,...,
n
n,...,
n
n,
n
n ==== ββββ (4.105)
Qi-sarcina echivalentă, corespunzătoare unei anumite trepte a schimbătorului de viteze. Coeficienții αi [%] pentru anumite tipuri de cutii de viteze sunt dați în tabelul 4.22.
Tabelul 4.22 Autoturisme Autocamioane Autobuze Numărul
treptelor de viteze
Treaptă Mici Mijlocii Obi şnuite Mari Autotrenuri Urbane Intereurbane
3 trepte I II
III *
1 30 69
1 22 77
- - - - -
4 trepte
I II III IV *
0,5 3 20
76,5
0,5 2
10,5 87
1 3 21 75
5 35 40 20
5 15 55 25
1 5 25 69
1 3 21 75
4 trepte (cu supra-viteză )
I II
III *
IV
1 8 23 68
0,5 3 20
76,5
1 4 35 60
- -
1 8 40 51
1 4 35 60
5 trepte
I II III IV
V*
-
0,5 2 4
18,5 75
1 3 5 16 75
3 15 25 40 17
3 12 30 40 15
1 4 10 20 65
1 3 5 16 75

C.C.A. – Cutii de viteze
37
5 trepte (cu supra-viteză)
I II III IV *
V
-
0,5 2 15
57,5 25
1 3 12 64 20
- -
1 4 15 60 20
1 3 12 64 20
6 trepte
I II III IV
V VI *
- -
1 2 4 8 15 70
3 10 20 30 25 12
3 5 20 40 20 12
1 2 4 8 15 70
3 10 20 30 25 12
6 trepte (cu supra-viteză)
I II III IV
V* VI
- -
1 2 4 8 70 15
- -
1 3 6 15 60 15
1 2 4 8 70 15
8 trepte (cu supra-viteză)
I II III IV
V VI
VII * VIII
- -
0,5 1 3
5,5 10 15 45 20
3 10 15 25 25 10 7 5
- -
3 10 15 25 25 10 7 5
Turația echivalentă nech se calculează cu relația:
omed cvr
medech ii
r
V66,2n =
în care: Vmed este viteza medie de deplasare a automobilului (Vmed=50 km/h pentru autoturisme, Vmed=35 km/h pentru autocamioane); i0=raportul de transmitere al transmisiei principale; rr- raza de rulare roților motoare; icv med- raportul de transmitere mediu al schimbătorului de viteze.
Raportul de transmitere mediu al schimbătorului de viteze se determină cu relația:
n21
cvnn2cv21cv1cvmed ....
i....iii
αααααα
++++++=
în care: icv1,...,icvn sunt rapoartele de transmitere în diferite trepte ale schimbătorului de viteze;
1α .... nα -timpul relativ de utilizare a fiecărei trepte, exprimat în procente din timpul total de
exploatare. Sarcinile echivalente Q1, Q2 ... Qn pentru rulmenții radiali și radiali-axiali se determină cu relația:
( )[ ] diiii fSAYXVRQ ±+=
în care: Ri - este sarcină radială, corespunzătoare treptei de ordinul i a schimbătorului de viteze, în N; Ai- sarcina axială exterioară, care acționează asupra rulmentului în treapta de ordinul i, în N; X- coeficient de transformare a sarcinii locale în sarcină circumferențială (coeficient radial); Y- coeficient de transformare a sarcinii axiale în sarcină radială; V- coeficient de rotație (ia în considerare influența rotirii inelului interior sau exterior); Si-rezultanta forțelor axiale care iau naștere în rulmenții radiali-axiali sub influența sarcinilor radiale (figura 4.22); fd-coeficient care ia în considerare caracterul dinamic al sarcinii (în

C.C.A. – Cutii de viteze
38
cazul transmisiei automobilului fd=1...1,5 pentru autoturisme, fd=1,3...1.8 pentru autocamioane; limitele inferioare se iau pentru rulmenții schimbătorului de viteze).
Figura 4.22 Figura 4.23 Forțele axiale S, datorate forțelor radiale R (figura 4.73), se determină cu relația:
Y
R5,0Rtg2,1S ≈= β
Coeficienții X, Y și V se aleg, în funcție de tipul rulmentului, din cataloagele de rulmenți. Reacțiunile Ri și Ai sunt variabile (la fel ca și momentul motor), de aceea calculul lor se face considerând momentul echivalent Mech dat de relația:
Mech MM γ=
în care: γ -este coeficientul de utilizare al momentului motor și se determină din graficele prezentate în figura 4.23, în funcție de raportul dintre greutatea totală a automobilului Ga și momentul maxim al motorului MM. Durabilitatea rulmenților se alege astfel încât transmisia automobilului să funcționeze corespunzător între două reparații capitale. În tabelul 4.23 se dau valorile orientative pentru durabilitatea rulmenților până la reparația capitală.
Tabel 4.23
Tipul automobilului Durata de
funcţionare h Durabilitatea
mii km
Autoturisme
- până la 0,800 dm3 - 0,800-1449 dm3 - 1,500-1,999 dm3
- 2,000-4,000 dm3 - peste 4000 dm3
1500 .. 3000
120 150 170 240 270
Autocamioane
- până la N 102 4× - N 105,40,2 4×−
- N 10105,4 4×−
- peste N 1010 4×
2500 … 4000
130 155 … 175 155 … 280 255 … 305
Autobasculante - până la N 105 4× - N 10125 4×− - peste N 1012 4×
2500…3500 105
155…175 255…305

C.C.A. – Cutii de viteze
39
Autobuze
- microbuze - capacitate nominală de transport mică (lungimea de gabarit 5,9≤ m) - capacitatea nominală de transport medie (lungime de gabarit 9,5 – 11,0 m ) - capacitatea nominală de transport mare (lungimea de gabarit <11 m )
2500…4000
104…115 115 … 250 200 … 280 225 … 335
Remorci şi semiremorci înzestrate cu instalaţii speciale (izoterme şi frigorifice)
3000 …4000 140
Adoptând durabilitatea D și calculând sarcina echivalentă medie Qem, se determină
capacitatea de încărcare dinamică C, cu ajutorul căreia se alege din cataloage rulmentul corespunzător. În calculele de verificare, durabilitatea rulmentului se determină cu
relația:
n
n
2
2
1
1
D...
DD
1D ααα ++
=
în care: D1, D2 ... Dn sunt durabilitățile rulmentului ce se verifică în cazul în care ar lucra numai sub acțiunea sarcinilor Q1, Q2......Qn.

TRANSMISIA AUTOVEHICULELOR
1
CAPITOLUL 5
TRANSMISIA LONGITUDINALĂ
5.1. Rolul, condiţiile impuse şi clasificarea transmisiilor cardanice. Transmisii
longitudinale utilizate la autovehicule.
5.1.1. Rolul, condiţiile impuse şi clasificarea transmisiilor cardanice. Transmisia cardanică are rolul de a transmite un moment, fără amplificare, între diferitele organe ale autovehiculului, a căror poziţie relativă este, în general, variabilă.
Transmisiile cardanice sunt compuse dintr-un ansamblu de organe (articulaţii, cuplaje de compensare, amortizoare, suporturi intermediare, etc.) care constituie o unitate funcţională independentă. În construcţa de autovehicule, transmisiile cardanice, se folosesc ca transmisii de forţă, pentru a transmite momentul motor între diferitele ansambluri ale transmisiei şi ca transmisii de comandă, la sistemul de direcţie etc.
În cazul când se folosesc ca transmisii de forţă, acestea transmit momentul motor astfel: de la ambreiaj la cutia de viteze, atunci când cutia de viteze este aşezată pe cadrul autovehiculului, separat de motor; de la cutia de viteze la reductorul-distribuitor, când acestea sunt montate separat pe cadrul autovehiculului; de la cutia de viteze sau reductorul distribuitor la transmisia principală; de la diferenţial la roţi în cazul autovehiculelor cu suspensie independentă a roţilor motoare; de la diferenţial la roţile de direcţie şi motoare. Condițiile principale impuse transmisiilor cardanice sunt următoarele: să asigure sincronismul mişcării transmise; să realizeze compensările axiale şi unghiulare necesare; să realizeze amortizarea vibraţilor; să atenueze solicitările dinamice; să asigure unghiurile necesare între axele arborilor transmisiei; să aibă o durabilitate cât mai mare, construcţia să fie simplă şi economică; montarea şi demontarea să fie uşoare, întreţinerea să fie simplă şi economică. Clasificarea transmisiilor cardanice se poate face în funcţie de: destinaţie, legea de transmitere a mişcării, modul de construcţie. După destinaţie pot fi: transmisii de forţă şi transmisii de comandă. În funcţie de legea de transmitere a mişcării, pot fi: transmisii asincrone şi transmisii sincrone. Din punct de vedere constructiv, transmisiile cardanice pot fi: rigide sau elastice, cu lungimea arborilor variabilă sau constantă; cu configuraţie plană sau spaţială; cu poziţia relativă a arborilor invariabilă sau variabilă; bicardanice, tricardanice, tetracardanice etc.

TRANSMISIA AUTOVEHICULELOR
2
5.1.2. Rolul, compunerea şi clasificarea transmisiilor longitudinale.
Transmisia longitudinală are rolul de a transmite momentul motor de la cutia de viteze la transmisia principală în cazul autovehiculelor organizate după soluţia clasică, precum şi de la cutia de viteze la reductorul – distribuitor şi de la acesta la punţiile motoare, şi între punţi, în cazul autovehiculelor cu mai multe punţi motoare. Rezultă, deci, că transmisia longitudinală asigură transmiterea momentului motor între diferitele ansambluri ale transmisiei autovehiculului, a căror poziţie relativă este, în general variabilă.
Figura 5.1
Cutia de viteze 5 (figura 5.1) este montată pe cadrul 6, iar transmisia principală împreună cu puntea motoare este legată de cadru prin intermediul arcurilor 7. În acelaşi timp, axa geometrică a arborelui secundar 4 al cutiei de viteze este aşezată sub un anumit unghi în raport cu axa geometrică a arborelui conducător 8 al transmisiei principale, unghi care variază în timpul deplasării autovehiculului, deoarece variază distanţa dintre acei arbori în funcţie de sarcina utilă autovehiculului, rigiditatea suspensiei şi denivelările drumului.
De aceea, pentru a transmite momentul motor de la arbore la un altul, care au axele geometrice dispuse sub un unghi variabil γ , se foloseşte transmisia longitudinală, compusă
din articulaţiile cardanice 1 şi 2, arborele longitudinal 3 şi cuplajul de compensare axială 9. Clasificarea transmisiilor longitudinale se poate face după mai multe criterii: - după legea de transmitere a mișcării, transmisiile longitudinale pot fi: asincrone şi
sincrone. La transmisiile asincrone, raportul de transmitere este o mărime periodică, având valoarea medie egală cu unu; la cele sincrone, raportul de transmitere este constant şi egal cu unu;
- din punct de vedere constructiv, transmisiile longitudinale pot fi: deschise sau închise. Transmisiile longitudinale închise sunt dispuse într-un tub central;
- după numărul articulațiilor cardanice, se deosebesc: transmisiile monocardanice, bicardanice, tricardanice etc.
În figura 5.2 sunt prezentate schemele diverselor transmisii longitudinale utilizate la automobilele 4×2. Soluţia cu tub central (figura 5.2,a ) utilizează o singură articulaţie cardanică.
Transmiterea forţelor şi a momentelor de la roţile motoare la cadrul autovehiculului se
face prin intermediul tubului central (trompei cardanice) 4, în interiorul căruia se află arborele longitudinal 2 .

TRANSMISIA AUTOVEHICULELOR
3
În cazul transmisiei longitudinale deschise , sunt utilizate două articulaţii cardanice.
Figura 5.2 Articulaţiile cardanice 1 (figura 5.2,b) sunt montate la capătul arborelui longitudinal. Deoarece, în timpul deplasării autovehiculului distanţa dintre cele două articulaţii
cardanice este variabilă, transmisia longitudinală este prevăzută cu un cuplaj de compensare axială 5. În cazul autovehiculelor cu ampatament mare, pentru a mării rigiditatea arborelui longitudinal şi pentru a-i micşora tendinţa de vibrare, transmisia longitudinală este prevăzută cu un arbore principal 2 şi unul sau doi arbori intermediari 3 (figura 5.2, c şi d ), care au un suport intermediar 6, fixat pe cadrul autovehiculului.
Figura 5.3

TRANSMISIA AUTOVEHICULELOR
4
În figura 5.3 se reprezintă schema transmisiei longitudinale utilizate la automobilele 4×4, în figura 5.4 scheme de transmisii longitudinale utilizate la automobilele 4×6, iar în figura 5.5 scheme de transmisii longitudinale utilizate la automobilele 6×6.
Figura 5.4
Figura 5.5
5.2. Cinematica transmisiei longitudinale 5.2.1. Cinematica articulaţiei cardanice
În figura 5.6,a este reprezentată schema unei articulaţii cardanice, la care arborele 1 este conducător, iar arborele 2 condus, şi formează cu primul unghiul γ . În timpul rotaţiei,
c
b
a

TRANSMISIA AUTOVEHICULELOR
5
punctele AA’ ale furcii arborelui 1 descriu cercul 3, care se găseşte într-un plan perpendicular pe arborele 1.
Punctul BB' al furcii arborelui condus descrie cercul 4, care se găseşte într-un plan ce
face unghiul γ cu planul cercului 3. Dacă se consideră că arborele 1 se roteşte până când
punctul A ajunge în A1, în acelaşi timp punctul B va ajunge în B1. Figura 5.6
Între deplasările unghiulare ale celor doi arbori există următoarea relaţie: tgα = tgβ cosγ (5.1)
în care: α - este deplasarea unghiulară a arborelui conducător; β - deplasarea unghiulară a arborelui condus; γ - unghiul dintre cei doi arbori.
Din relaţia (5.1) rezultă că, la o rotire uniformă a arborelui conducător 1, arborele condus 2 se roteşte neuniform şi această neuniformitate este cu atât mai mare cu, cât unghiul γ dintre cei doi arbori este mai mare. Asincronismul mişcării furcilor articulaţiilor cardanice poate fi apreciat prin deplasarea unghiulară relativă a furcilor α-β (decalajul unghiular).
În figura 5.6,b este reprezentată dependenţa decalajului unghiular (α-β) în funcţie de unghiul α pentru diferitele valori ale unghiului γ. Din figură rezultă că, la o rotaţie completă a arborelui conducător (α =0...3600), arborele condus rămâne în urmă de două ori şi întrece tot de două ori arborele conducător. De asemenea, asincronismul mişcării este cu atât mai mare cu cât unghiul γ dintre cei doi arbori este mai mare .
Legătura dintre vitezele unghiulare ω1 şi ω2 ale celor doi arbori se poate obţine prin diferenţierea relaţiei (5.1), considerând unghiul γ constant:
γβ
βα
αcos
coscos 22
dd = , (5.2)
Prin împărţirea ambelor părţi ale ecuaţiei cu dt şi ţinând seama că 1ωα =dt
d,
iar, 2ωβ =dt
d, rezultă:
γαβ
ωω
coscos
cos2
2
1
2
⋅= (5.3)

TRANSMISIA AUTOVEHICULELOR
6
Dacă se consideră relaţia trigonometrică ( )ββ 22 1/1cos tg+= în care se
înlocuieşte din relaţia (5.1) γαβ cos/tgtg = , rezultă după transformări:
βγγβ
22
22
tgcos
coscos
+= (5.4)
Înlocuind în relaţia (5.3) pe β2cos dat de relaţia (5.4) şi ţinând seama că
ααα 222 sincostg =⋅ , se obţine:
γααγ
ωω
2221
2
coscossin
cos
+= (5.5)
Valoarea maximă a raportului 1
2
ωω
se obţine pentru ππα 2,,0= , rezultând :
γωω
cos
1
max1
2 =
(5.6)
Raportul 1
2
ωω
are valoare minimă, pentru. 2
3,
2
ππα = , rezultând:
γωω
cosmin1
2 =
(5.7)
Limita maximă şi limita minimă a raportului 1
2
ωω
sunt cu atât mai apropriate una de
alta, cu cât unghiul γ dintre cei doi arbori este mai mic. Dependenţa dintre diferenţa vitezelor unghiulare ω1-ω2 şi viteza unghiulară ω1 a
arborelui conducător se obţine pornind de la relaţia (5.5) (prin schimbarea semnului ambelor părţi, cărora li se adaugă apoi o unitate), rezultând:
γααγγαα
ωωω
222
222
1
21
coscossin
coscoscossin
+−+=
− (5.8)
În figura 5.7 se reprezintă grafic relaţia (5.8), din care rezultă că şi viteza unghiulară a arborelui condus în timpul unei rotaţii rămâne în urmă de două ori şi întrece tot de două ori viteza unghiulară a arborelui conducător.
Figura 5.7

TRANSMISIA AUTOVEHICULELOR
7
Variaţiile rapide ale vitezei unghiulare a arborelui condus înrăutăţesc condiţiile de lucru ale transmisiei principale şi vor da naştere la forţe de inerţie importante care intensifică uzura articulaţiilor cardanice.
5.2.2. Cinematica transmisiei longitudinale bicardanice
Pentru a înlătura dezavantajul articulaţiei cardanice, transmisiile longitudinale cele mai răspândite la automobile utilizează două articulaţii 4 şi 5, aşezate la extremităţile arborelui longitudinal 2 (figura 5,8).
La o deplasare unghiulară α a arborelui conducător 1, arborelui longitudinal 2 îi va corespunde deplasarea unghiulară 1ϕ , iar relaţia dintre ele este: 11 costgtg γϕα =
(5.9) De la arborele longitudinal 2, mişcarea se transmite, prin articulaţia cardanică de la
celălalt capăt, arborelui condus 3. Dacă 1ϕ este deplasarea unghiulară a arborelui 2 şi β a
arborelui 3, atunci se poate scrie :
21 costgtg γϕβ = (5.10)
Dacă se înlocuieşte 1ϕtg din relaţia (5.10) în relaţia (5.9), rezultă:
2
1
cos
cos
γγβ=α tgtg (5.11)
Figura 5.8
Figura 5.9 Din relaţia (5.11) rezultă că transmisia bicardanică devine sincronă dacă 21 γγ = . În
cazul în care unghiul 1γ este diferit de unghiul 2γ , decalajul unghiular βα − dintre arborii 1
şi 3 variază în funcţie de unghiurile de înclinare dintre arborele longitudinal şi arborele conductor şi condus, conform figurii 5.9,a.
Din figură rezultă că decalajul unghiular βα − este maxim pentru 012 =γ şi are
valoarea zero când 21 γγ = .

TRANSMISIA AUTOVEHICULELOR
8
Trebuie subliniat faptul că şi în cazul în care 21 γγ = , arborele longitudinal 3 se va roti
cu o viteză unghiulară variabilă, dacă furcile 4 şi 5, montate la extremităţile arborelui longitudinal, nu sunt în acelaşi plan şi fac între ele un unghi ϕ .
În figura 5.9,b este reprezentată variaţia decalajului unghiular βα − în funcţie de unghiul de rotaţie α al arborelui conducător pentru diferite unghiuri de decalare ϕ ale
furcilor, când 21 γγ = .
Din cele de mai sus rezultă că sincronismul transmisiei longitudinale bicardanice se obţine dacă sunt îndeplinite condiţiile: unghiurile 1γ şi 2γ pe care le face arborele
longitudinal cu arborele conducător şi condus sunt egale; furcile montate la extremităţile arborelui longitudinal sunt în acelaşi plan; axele furcilor arborelui conducător şi condus sunt coplanare.
Figura 5.10 În practică, transmisia longitudinală bicardanică se întâlneşte fie în varianta Z (figura
5.10,a) cea mai utilizată, fie în varianta M (figura 5.10,b).
5.3. Construcţia transmisiei longitudinale 5.3.1. Construcţia articulaţiilor cardanice
Articulaţiile cardanice sunt mecanisme care servesc la transmiterea mişcării de rotaţie între doi arbori concurenţi, cu unghiuri între axe, în general, variabile şi al căror raport de transmitere este egal cu unu.
Din punct de vedere constructiv şi al principiului de funcţionare , articulaţiile cardanice pot fi sincrone şi asincrone. La rândul lor ,articulaţiile cardanice asincrone se împart în articulaţii cardanice rigide şi articulaţii cardanice elastice. Articulaţiile cardanice sincrone pot fi articulaţii cardanice duble (obţinute prin dublarea celor asincrone) şi articulaţii cardanice cu viteze unghiulare egale (homocinetice).

TRANSMISIA AUTOVEHICULELOR
9
La transmisiile longitudinale ale autovehiculelor se folosesc articulaţii cardanice asincrone rigide şi elastice. Articulaţiile cardanice homocinetice se folosesc, în special, la roţile de direcţie ale autovehiculelor cu punte de direcţie şi motoare .
Articulațiile cardanice asincrone rigide Pot fi cu lagăre cu alunecare sau cu rulmenţi şi permit transmiterea mişcării de rotaţie
datorită legăturii articulate a elementelor componente . Transmisiile longitudinale ale autovehiculelor moderne sunt prevăzute cu articulaţii cardanice asincrone rigide de tip deschis, cu rulmenţi cu role-ace. Aceste articulaţii au o durată mai mare de funcţionare şi permit, la dimensiuni constructive reduse, transmiterea unor sarcini mari la turaţii ridicate.
Figura 5.11 Articulaţia cardanică asincronă rigidă de tip deschis se compune din furcile 1 şi 2
(figura 5.11,a), asamblate cu crucea 2, prin intermediul rulmenţilor cu role-ace 9. Furca 1 este prevăzută în majoritatea cazurilor cu o flanşă cu ajutorul căreia se asamblează, prin şuruburi, de flanşa arborelui secundar al cutiei de viteze sau de flanşa arborelui pinionului transmisiei principale.
Furca 3 este solidarizată la rotaţie cu arborele longitudinal 5 fie prin sudură, fie printr-un butuc canelat care permite modificarea distanţei dintre cele două articulaţii cardanice ale arborelui (cuplaj de compensare axială).
Crucea cardanică este prevăzută cu canale de ungere prin care lubrifiantul de la ungătorul 4 ajunge la rulmenţi. Alezajele mari din fusurile crucii servesc la mărirea elasticităţii acestora ,uniformizând distribuţia eforturilor pe lungimea fusurilor şi ca rezervor de lubrifiant.
c b
a

TRANSMISIA AUTOVEHICULELOR
10
Rulmenţii cu role-ace sunt compuşi dintr-o carcasă 10, în care se găseşte un număr de role-ace 9, care rulează direct pe fusul crucii. Carcasa rulmenţilor este fixată în braţele furcilor cu ajutorul capacelor 8, fixate cu şuruburile 11 şi asigurate cu şaibele 7. Garnitura de etanşare 6 nu permite scurgerea lubrifiantului din articulaţia cardanică şi în acelaşi timp protejează rulmenţii contra pătrunderii murdăriei. Supapa de siguranţă 12 menţine presiunea lubrifiantului la o anumită valoare, permiţând eliminarea surplusului de lubrifiant şi a bulelor de aer în timpul gresării.
La unele tipuri constructive de articulaţii cardanice ,fixarea carcasei rulmenţilor în orificiile braţelor furcilor se face cu ajutorul unui inel de siguranţă 13 (figura 5.11,b şi c), dispus la unul din capetele carcasei.
Figura 5.12 În figura 5.12 se prezintă sisteme de etanşare utilizate la articulaţiile cardanice
deschise . Sistemul de etanşare cu inel de pâslă (figura 5.12,a)este compus din inelul de etanşare
1, din pâslă presată, montat în carcasa metalică 2, şi din bucşa 3. Suprafaţa frontală a bucşei este apăsată pe inelul de pâslă, realizând etanşarea. În ultimul timp, se utilizează foarte mult articulaţiile cardanice ce folosesc dispozitive de etanşare cu manşoane de cauciuc montate pe fusul crucii cu o prestrângere iniţială .

TRANSMISIA AUTOVEHICULELOR
11
La sistemul din figura 5.12,b manşonul din cauciuc 3 este montat sub şaiba 4, în carcasa 5, a cărei margine exterioară este îndoită în degajarea inelului exterior al rulmentului 6. Opritorul de praf 2 este montat prin presare pe porţiunea fusului 1 de diametru mai mare. Canalele radiale 7 din manşon servesc la eliminarea surplusului de lubrifiant şi aerului în timpul gresării conform traseului indicat de săgeţi. În cazul în care braţul crucii 1 are o formă tronconică (figura 5.12,c), etanşarea se face cu ajutorul manşonului din cauciuc 2, montat în carcasa 3. Manşoanele de cauciuc sunt prevăzute cu locaşuri pentru lubrifiant sub diferite forme (figura 5.12,d). Locaşul din manşon se umple cu lubrifiant spre a proteja rulmentul împotriva corosiunii. Manşoanele de etanşare se execută din cauciuc sintetic rezistent la presiuni ridicate (850 C) şi la acţiunea lubrifiantului.
Sub acţiunea momentului motor, furca şi, parţial, braţele crucii se deformează, iar presiunea de contact nu este uniformă, ducând la uzura prematură a rulmenţilor. Pentru a obţine paralelismul rolei-ac a rulmentului cu generatoarele suprafeţelor fusului crucii şi alezajului furcii în zona de contact, în stare deformată se utilizează prelucrarea conică a fusului sau alezajului furcii. Conicitatea fusului trebuie să fie inversă celei din carcasă, iar diferenţa dintre diametrele maxim şi minim trebuie să fie cuprinsă între 0,1 şi 0,5 din diametrul mediu.
Articulațiile cardanice asincrone elastice Se montează, în general, între schimbătorul de viteze şi reductorul-distribuitor când
acestea sunt montate în cartere diferite, pentru compensarea sau eliminarea inexactităţilor montajului şi deplasările dintre acestea (datorită deformaţiei cadrului autovehiculului).
Figura 5.13
Aceste articulaţii contribuie şi la micşorarea sarcinilor dinamice, la amortizarea vibraţiilor şi oscilaţiilor de torsiune care apar în transmisia autovehiculului.
Articulaţia cardanică asincronă elastică (figura 5.13) se compune din furcile 2 şi 4 cu trei braţe dispuse la 1200 unul faţă de altul, fixate cu şuruburile 6 de discul elastic 3.
Deformaţiile discului elastic 3 permit transmiterea mişcării de la un arbore la altul sub un unghi de 3-50. Montarea articulaţiei în transmisia autovehiculului se face prin solidarizarea furcii 2 de arborele conducător 1 şi montarea culisantă a furcii 4 pe arborele condus 5 pentru compensarea abaterilor axiale. Discul elastic, de obicei ,se execută dintr-o textură cauciucată, care rezistă la o temperatură cuprinsă între - 45 şi + 600 C.

TRANSMISIA AUTOVEHICULELOR
12
5.3.2. Constucţia arborilor longitudinali
Arborii longitudinali fac legătura între două articulaţii sau între articulaţia cardanică şi
unul din ansamblele transmisiei autovehiculului, având rolul de a transmite la distanţă momentul de torsiune. Arborii longitudinali sunt formaţi din partea centrală (arborele propriu-zis) de secţiune circulară şi piese de legătură cu articulaţiile cardanice sau ansamblul transmisiei .
Partea centrală a arborelui longitudinal poate fi tubulară sau plină. Arborii tubulari sunt cei mai utilizaţi deoarece, în comparaţie cu arborii cu secţiune plină, au o mai mare rigiditate pentru aceeaşi greutate, permiţând mărirea turaţiei de funcţionare. Forma constructivă a arborelui longitudinal depinde de lungimea dintre articulaţiile cardanice, de regimul de încărcare şi de locul de dispunere în cadrul transmisiei.
Figura 5.14 În figura 5.14,a este reprezentată construcţia arborelui longitudinal executat dintr-un
tub de oţel 8, având la capătul dinspre cutia de viteze, montat prin presare şi consolidat prin sudură, un arbore canelat 5, pe care culisează furca 2 a articulaţiei cardanice 1; la capătul dinspre puntea motoare este montată furca 10 a articulaţiei cardanice 12. Montarea furcii 2 pe arborele 5, prin intermediul canelurilor, este necesară pentru a permite variaţia distanţei dintre axele crucilor cardanice 3 şi 11 datorită variaţiei săgeţii suspensiei. Această îmbinare poartă denumirea de cuplaj de compensare axială. Pentru micşorare frecării dintre caneluri şi a uzurii lor, acestea sunt unse prin intermediul ungătorului 4, montat în butucul furcii 2.
Pentru ca unsoarea să nu iasă din regiunea de ungere, precum şi pentru a nu pătrunde murdărie, butucul furcii este prevăzut la capăt cu garnitura de etanşare 6.
La alte tipuri constructive, când arborii lucrează în medii cu impurităţi, cuplajul de compensare axială, în afară de inelul de etanşare 1, este protejat de un manşon gofrat de cauciuc 2 (figura 5.14,b).
În unele cazuri, pentru etanşare, se utilizează un tub telescopic suplimentar 2 (figura 5.14,c), fixat pe arbore printr-un inel de cauciuc 4. Etanşarea suplimentară se obţine prin inelul 3, montat la celălalt capăt al tubului metalic 2.

TRANSMISIA AUTOVEHICULELOR
13
Formarea pernelor de aer în timpul deplasărilor relative se evită prin orificiul 5. După fabricare, arborele longitudinal, împreună cu articulaţiile cardanice este supus echilibrării dinamice. Echilibrarea arborelui se realizează cu adaosuri de metal, prin sudare prin puncte sub forma plăcuţelor 7 şi 9 (figura 5.14,a).
După terminarea echilibrării se marchează pe manşonul furcii alunecătoare 2 şi pe arborele canelat 5, câte un reper pentru montare, deoarece montarea furcii 2 în altă poziţie ar putea duce la dezechilibrarea arborelui 8. Pentru a obţine o echilibrare corespunzătoare a arborilor longitudinali, se recomandă efectuarea unei echilibrări dinamice la o turaţie joasă, cuprinsă între 600 şi 1000 rot/min, urmată de o verificare la turaţia nominală.
Figura 5.15
Pentru dezechilibrări se admit următoarele valori: 5mN.m - pentru autoturisme şi
autocamioane mijlocii şi 7,5 mN.m - pentru autobuze şi autocamioane grele. În unele cazuri, dezechilibrarea admisibilă a arborilor longitudinali este dată pe unitatea de greutate la diferite turaţii prescrise pentru efectuarea verificării. Astfel firma Schenk dă următoarele valori admisibile pentru dezechilibrare: 0,063...0,13 mN. m/N la n = 950 rot/min; 0,02...0,05 mN.m/N la n = 3000 rot/min; 0,0063...0,016 mN.m/N la n = 9500 rot/min .
În cazul în care arborii longitudinali nu permit compensări axiale, lungimea lor este constantă, iar furcile articulaţiilor 1 (figura 5.15) sunt îmbinate de arborele propriu-zis prin sudură . Arborele poate avea acelaşi diametru pe toată lungimea (figura 5.15,a) sau un diametru mărit în partea centrală (figura 5.15,b).

TRANSMISIA AUTOVEHICULELOR
14
În figura 5.16 se prezintă diferite tipuri constructive de arbori longitudinali telescopici. În mod obişnuit, îmbinarea dintre un capăt al arborelui şi butucul furcii corespunzătoare se realizează prin caneluri (figura 5.16,a şi b), iar când lungimea arborelui este mare şi sunt necesare compensări axiale mari, acesta se execută din două bucăţi (o ţeavă şi o bucşă canelată) îmbinate prin sudură (figura 5.16,d). Arborele din figura 5.16,c se utilizează în cazul transmiterii unor momente de torsiune mari.
Figura 5.16
5.3.3. Construcţia suporturilor intermediare
În cazul când distanţa dintre punţile autovehiculului este mare, utilizarea transmisiei
longitudinale bicardanice necesită un arbore mai lung, care pentru evitarea funcţionării în regim de rezonanţă, trebuie să aibă un diametru de dimensiuni prea mari. Din acest motiv, arborele longitudinal este secţionat în două-principal şi intermediar, rezultând o transmisie longitudinală tricardanică cu un suport intermediar. Introducerea arborelui intermediar permite să se reducă lungimea arborelui principal, micşorându-se astfel tendinţa apariţiei rezonanţei. În general, arborele longitudinal se secţionează dacă lungimea sa depăşeşte 1,8-2 m.
La transmisiile longitudinale ale autoturismelor şi autobuzelor, arborele longitudinal se secţionează şi din motive de îmbunătăţire a indicilor de maniabilitate şi utilizare a spaţiului interior.
a
b
c
d

TRANSMISIA AUTOVEHICULELOR
15
În afara rolului principal de rezemare a arborelui longitudinal ,suportul intermediar trebuie să amortizeze şi să izoleze vibraţiile care iau naştere în transmisia longitudinală şi să permită compensări axiale, radiale şi unghiulare ale arborilor.
La automobilele cu două punţi, suportul intermediar se fixează de una din traversele intermediare ale cadrului, iar în cazul autovehiculelor cu trei punţi se poate fixa de carterul punţii intermediare, fie de cadrul autovehiculului.
Figura 5.17
Suporturile intermediare utilizate în transmisia longitudinală a autovehiculelor pot fi: elastice sau rigide, cu unul sau doi rulmenţi.
Suporturile intermediare elastice. Suporturile intermediare elastice (figura 5.17) se compun, în principal, dintr-un
rulment radial cu bile pe un singur rând, montat în carcasa suportului prin intermediul unui suport elastic, care prezintă proprietăţi bune de amortizare şi permite compensări unghiulare. La soluţia din figura 5.17,a rulmentul cu bile de tip închis 1, fixat pe arborele longitudinal 4, este montat presat în carcasa 2, prin intermediul inelului de cauciuc 3.
În figura 5.17,b se repezită un suport intermediar având inelul de cauciuc 1 de dimensiuni mai mari şi prevăzut cu goluri pentru mărirea elasticităţii. La soluţia din figura 5.17,c rulmentul 5, este montat în flanşa alungită 3 de formă eliptică (balansier), fixată de cadrul autovehiculului prin şuruburile 1 şi 4, prin intermediul bucşelor de cauciuc 2. Suporturile intermediare sunt prevăzute cu o serie de apărătoare din tablă contra prafului, noroiului şi a apei, întrucât ele se găsesc sub caroseria autovehiculului. Suporturile intermediare elastice se utilizează mai ales la automobilele 4x2.

TRANSMISIA AUTOVEHICULELOR
16
Suporturile intermediare rigide. Suporturile intermediare rigide pot fi simple sau duble. Suporturile intermediare
simple sunt compuse dintr-un lagăr fix, cu rulmenţi oscilanţi cu bile sau cu role, iar cele duble cu rulmenţi radiali-axiali role conice sau rulmenţi radiali-axiali cu bile.
În figura 5.18 se reprezintă un suport intermediar rigid dublu, cu rulmenţi radiali-axiali cu role conice, utilizat la acţionarea punţii motoare din spate la automobile 6x6 sau 6x4.
Figura 5.18
El se compune din arborele 3, având montat la capete flanşele 1 şi 4 (pentru montarea
articulaţiilor cardanice) şi din rulmenţii conici 2, prin care arborele se sprijină în carcasa suportului 5. Suportul mai este prevăzut cu dispozitivele de etanşare 6 şi ungătorul 7.
5.4. Calculul transmisiei longitudinale
Calculul de rezistență al transmisiei longitudinale cuprinde: determinarea momentului
de calcul; calculul arborilor longitudinali; calculul articulațiilor cardanice (calculul furcii, calculul crucii și a rulmenților cu role-ace).
5.4.1. Determinarea momentului de calcul
Pentru transmisiile longitudinale momentul de calcul Mc se determină considerând cazul în care motorul dezvoltă momentul maxim Mm, și este cuplată treapta I a cutiei de viteze, iar relația de calcul este:
Mc=Mmicv1 (5.11) în care: icv1 - este raportul de transmitere al primei trepte a cutiei de viteze. În cazul automobilelor cu mai multe punți motoare, când nu se cunoaște distribuția
momentului motor la arborii longitudinali dispuși după reductorul-distribuitor, momentul de calcul se determină în funcție de aderența roților motoare, cu relația:

TRANSMISIA AUTOVEHICULELOR
17
o
rmc i
rZM
ϕ= (5.12)
în care: Zm - este reacțiunea normală dinamică la roțile punții motoare; ϕ - coeficientul de
aderență maxim dintre roată și drum ( )8.0...7,0max =ϕ ; rr - raza de rulare a roții motoare; i0
- raportul de transmitere de la roata motoare la transmisia longitudinală. La automobilele prevăzute cu frână pe transmisie, în timpul frânării până la blocarea
roților, datorită influenței momentelor de inerție ale acestora, încărcarea dinamică care apare depășește momentul maxim de aderență al roților cu drumul, fiind practic limitat de valoarea momentului de frânare. În acest caz, momentul de calcul se determină cu relația:
Mc=cdMMicv1 (5.13) în care: cd este coeficientul de încărcare dinamic având o valoare cuprinsă între 1,5 și 3 (cd=2...3 pentru autoturisme și cd=1,5...2 pentru autocamioane).
5.4.2. Calculul arborilor longitudinali Arborii longitudinali se calculează la torsiune și se verifică deformația la torsiune,
precum și turația critică. Calculul arborelui la solicitarea de torsiune. Tensiunea pentru solicitarea de torsiune se determină pentru zonele în care modulul de
rezistență polar Wt este minim, cu relațiile: - pentru arborele cu secțiune circulară plină:
32,0 D
M
W
M c
t
ct ==τ (5.14)
- pentru arborele cu secțiune tubulară:
( )44
16
dD
DM
W
M c
t
ct −
==π
τ (5.15)
în care: D - este diametrul exterior al arborelui; d - diametrul interior al arborelui tubular. Tensiunea admisibilă la torsiune, pentru oțelurile utilizate în construcția arborilor
longitudinali se determină luându-se în considerație un coeficient de siguranță de 3...3,5 față de limita de curgere la torsiune, rezultând atτ =250...300 [MPa].
În tabelul 5.1 sunt date caracteristicile oțelurilor folosite pentru construcția arborilor longitudinali (oțeluri aliate DIN 17200 și DIN 17210)
Tabelul 5.1 Conținutul
% Caracteristici mecanice
[Mpa] Tipul oțelului C Si Mn Cr V rσ cσ
42 Cr Vb 0,38 0,46
0,15 0,35
0,5 0,8
1,4 1,7
0,7 1,2
1000…1300 900
41 Cr H 0,38 0,44
0,15 0,35
0,5 0,8
0,9 1,2
- 1000…1200 800

TRANSMISIA AUTOVEHICULELOR
18
20 Mn Cr 0,17 0,22
0,15 0,35
1,1 1,4
1,0 1,3
- 750…900 480
C 45 0,42 0,50
0,15 0,35
0,5 0,35
0,5 0,8
- 1000…1300 700
Calculul de rezistență al cuplajului de compensare axială se face conform STAS 1767-
68, pentru caneluri dreptunghiulare sau în evolventă. Tabelul 5.2
Diametrul interior al țevii d1 [mm]
Grosimea peretelui [mm]
Modulul de rezistență polar Wt [cm3]
45 2,0 2,5 3,0
6,67 8,44 10,26
55
2,0 2,5 3,0 3,5
9,87 12,47 15,11 17,82
71
1,8 2,1 2,5 3,0
14,63 17,15 20,54 24,84
85
2,0 2,5 3,0 3,5
23,26 29,25 35,33 41,48
141 2,0 2,5 3,0
38,73 48,64 58,65
Pentru partea tubulară a arborelui longitudinal se utilizeză următoarele tipuri de țevi
(în funcție de modul de executare): - țevi din oțel trase la rece realizate prin sudură;
- țevi din oțel sudate electric cap la cap realizate prin rezistență. Majoritatea mărcilor de oțel au efortul unitar la rupere 700460−=atσ MPa.
Porțiunea canelată a arborelui longitudinal se execută din oțeluri de îmbunătățire slab aliate, cu conținut de carbon echivalent cu 40C10 STAS 791-96.
În tabelul 5.2 sunt date dimensiunile recomandate pentru arborii longitudinali cu secțiune tubulară, executați din oțel sudabil.
Sunt admise următoarele valori pentru presiunea specifică: [ ]MPa 5,13=saσ , pentru
canelurile cu duritatea HRC pâ`nă la 35; [ ]MPa 20=saσ , pentru canelurile cu duritatea
HRC peste 35.

TRANSMISIA AUTOVEHICULELOR
19
Verificarea deformației la răsucire . Unghiul de răsucire, exprimat în grade, al arborelui longitudinal, se calculează cu
relația :
πθ 180
GI
LM`
p
c ⋅= (5.16)
în care: Mc - este momentul de calcul determinat cu relația (5.13); L - lungimea arborelui longitudinal; G - modulul de elasticitate transversal; Ip - momentul de inerție polar al
arborelui ( 32/4DI p π= pentru secțiune circulară plină și ( ) 32/dDI 44p −= π pentru
secțiune tubulară).
Deformația admisibilă la răsucire este 087 −=θ . Verificarea arborelui longitudinal la turația critică. Datorită neuniformității materialului în lungul arborelui și inexactității de montaj, la
funcționarea cu turație ridicată, în arborii longitudinali apar forțe centrifuge. Sub acțiunea acestor forțe, arborele longitudinal, care are o secțiune mică și o lungime mare, are tendința de a intra în vibrație, ceea ce poate duce la distrugerea lui.
Considerând centrul de greutate al arborelui deplasat cu excentricitatea e față de axa de rotație, la rotirea arborelui cu viteza unghiulară ω apare forța centrifugă Fc care va da naștere la o încovoiere suplimentară având săgeata f. În acest caz forța centrifugă este dată de relația :
( ) 2ωfemFc += , (5.17)
unde: m este masa arborelui longitudinal. Forța centrifugă care va fi echilibrată de forța elastică Fe a arborelui, dată de relația:
3L
EIcfF p
e = , (5.18)
în care: c - este un coeficient ce depinde de felul încărcării și tipul reazemelor arborelui (în cazul sarcinilor uniform distribuite pe lungimea L, c=384/5, dacă arborele se poate deforma liber în reazeme şi c=384, dacă arborele nu se poate deplasa liber în reazeme); Ip - momentul de inerție polar al arborelui; L - lungimea arborelui; E - modulul de elasticitate la întindere.
Din condiția de echilibru a arborelui (Fc = Fe ), rezultă pentru săgeata arborelui expresia:
23
2
/ ω−ω=
mLcEI
mef
p
(5.19)
Din relația (5.19), rezultă că, dacă numitorul tinde către zero, săgeata f crește rapid, iar
la turația critică, câ`nd 3p2
crL
EIcm =ω , ∞⇒f producându-se ruperea arborelui. Din
condiția ca săgeata ∞⇒f rezultă expresia vitezei unghiulare critice crω :
[rad/s] 3mL
cEIpcr =ω (5.20)
iar turația critică:

TRANSMISIA AUTOVEHICULELOR
20
[rot/min] 30
3mL
cEIn p
cr π= (5.21)
În cazul arborilor cu secțiune tubulară (cu diametrul exterior D și diametrul interior d) se pot scrie relațiile:
( )44
64dDI p −= π
; g
Gm= ; γALG = (5.22)
în care: G - greutatea arborelui;
( )44
4dDA −= π
; 33 N/mm 10078,0 −×=γ ; 25 N/mm 101,2 ⋅=E ;
Acestea, substituite în expresia (5.21), dau :
( )[rot/min] 10225,1
2
226
L
dDcncr
−⋅= (5.23)
În cazul arborilor de secțiune plină cu diametrul d (având 64
4dI p
⋅= π și
4
2dA
⋅= π)
rezultă:
10225,12
6 cL
dncr ⋅= (5.24)î
Dacă în relațiile (5.23) și (5.24) se înlocuiește valoarea lui c pentru cele două cazuri considerate, se obține: - pentru arborele tubular care se află liber în reazeme:
( ) 102,1
2
227
L
dDncr
−⋅= (5.25)
- pentru arborele tubular montat pe rulmenți într-o trompă cardanică:
( ) 1075,2
2
227
75,2L
dDn
−⋅= (5.26)
- pentru arborele cu secțiune plină care se află liber în reazeme:
102,12
7
L
dncr ⋅= (5.27)
- pentru arborele cu secțiune plină montat pe rulmenți într-o trompă cardanică:
1075,22
7
L
dncr ⋅= (5.28)
Trebuie arătat că ruperea arborelui nu se produce instantaneu, iar dacă se trece repede peste turația critică, ruperea arborelui poate să nu se producă. Cu toate acestea, la alegerea dimensiunilor arborelui longitudinal se are în vedere o anumită rezervă pentru turația critică, astfel ca:
0,2....2,1max
=n
ncr (5.29)
unde: nmax este turația maximă a arborelui longitudinal corespunzătoare vitezei maxime de deplasare a autovehiculului. Limita minimă se admite numai la o echilibrare dinamică foarte bună a arborelui.

TRANSMISIA AUTOVEHICULELOR
21
5.4.3. Calculul articulației cardanice
Elementele articulației cardanice care se calculează sunt: furca, crucea și rulmenții
role-ace. Calculul furcii cardanice. Furca cardanică este solicitată de forța F (ce acționează în punctul B și este
perpendiculară pe planul furcii, figura 5.19).
Secțiunea periculoasă A-A este solicitată la încovoiere și la răsucire. Forța F care solicită fiecare braț al furcii cardanice este dată de relația:
R2
MF c= (5.30)
în care : Mc - este momentul de calcul al transmisiei longitudinale; R- raza medie la care
acționează forța F. Tensiunea pentru solicitarea de încovoiere în secțiunea A-A este:
ii
ii W
Fl
W
M ==σ (5.31)
unde:
- 6
bhW
2
i = pentru secțiunea dreptunghiulară;
- 10
bhW
2
i = pentru secțiunea eliptică.
Sub acțiunea forței F, brațul furcii, în secțiunea A-A, este solicitat la răsucire :
t
1
t
ti W
Fl
W
M ==τ (5.32)
unde:
Figura 5.19

TRANSMISIA AUTOVEHICULELOR
22
- hbW 2t α= pentru secțiunea dreptunghiulară;
- hb2,016
hbW 2
2
t ≈= π pentru secțiunea eliptică.
Coeficientul α depinde de raportul h/b (tabelul 5.4). Tabelul 5.4 H/b 1 1,2 1,5 1,75 2 2,5 4 4 5 6 8 10
α 0,200
0,208
0,231
0,239
0,246
0,258
0,267
0,282
0,291
0,299
0,307
0,312
Pentru materialele furcilor cardanice, tensiunea admisibilă la încovoiere este
[ ]MPa 120...100=aiσ , iar tensiunea admisibilă la torsiune [ ]MPa 150...120=atτ .
În tabelul 5.5 se dau principalele dimensiuni ale furcilor cardanice (figura 5.19), în funcție de momentul maxim transmis. Tabelul 5.5
Momentul maxim transmis, [Nm]
A B C D E F G H
135 58 47+0,05 30 24 18 1,5+0,2 3,5 5 225 65 52+0,05 35 24 18 1,7+0,2 4,5 6 400 75 62+0,05 42 35 27 2+0,2 5,5 6 755 90 74+0,05 47 46 36 2,5+0,15 6 8 1350 100 84+0,1 57 56 40 2,5+0,15 7 8 2400 120 101,5+0,1 75 65 45 2,5+0,15 8 10 4200 150 130+0,1 90 75 60 2,5+0,15 9 12 7600 180 155+0,1 110 78 60 2,5+0,15 10 14
Furcile cardanice se execută din oțeluri cu conținut mediu de carbon, 0,35-0,45%, sau
din oțeluri de îmbunătățire slab aliate. După călire și revenire, duritatea furcilor variază între 197...300 HB în funcție de tipul
autovehiculului.
Figura 5.19 Figura 5.20
Calculul crucii cardanice. Crucea cardanică este supusă solicitărilor la încovoiere, forfecare și strivire de către
forța F1 așa cum se vede din figura 5.20.

TRANSMISIA AUTOVEHICULELOR
23
Forța F1 este rezultanta a două forțe, una din partea furcii arborelui conducător și alta din partea furcii arborelui condus. Rezultanta care acționează asupra fiecărui braț al crucii cardanice se calculează cu relația:
γcos1F
F = (5.33)
unde: γ - este unghiul dintre axele arborilor.
Tensiunea la încovoiere în secțiunea A-A, se calculează cu relația: ( )
31
11
1,0
2/
d
LhF
W
M
i
ii
−==σ (5.34)
Se admite ca tensiunea admisibilă la încovoiere să fie: [ ]MPa 180150−=aiσ .
Tensiunea de forfecare la baza fusului se determină cu relația:
2
4
d
Ff π
τ′
= (5.35)
în care: forța F/ se calculează cu relația :
( ) γcos5,02 hR
MF c
−=′
Se recomandă: [ ]MPa 180150−=afτ .
Verificarea la strivire se face determinând tensiunea de strivire pe fusul crucii, sub acțiunea forței Fl, cu relația:
dh
Fs
1=σ (5.36)
Se recomandă: 2N/mm 180150−=asσ pentru bucșe din oțel: [ ]MPa 4535−=saσ ,
pentru rulmenți cu role-ace. În tabelul 5.6 se dau principalele dimensiuni ale crucilor cardanice (figura 5.21) în
funcție de momentul maxim transmis. Tabelul 5.6
Momentul maxim transmis [Nm]
d D H H1
135 225 400 450 755 1350 2400 4200 7500
8,88 10,19 12,72 13,42 15,12 18,28 22,25 27,83 32,44
17 19 22 23 26 30 35 44 50
37 44 54
53,8 62,8 74,2 89,8 117,8 143,8
42 48 54
58,2 69,8 81,7 96,8 124,8 152,8
Crucile cardanice se execută din oțeluri aliate de cementare, elementul principal de
aliere fiind cromul. Cementarea se face pe o adâncime de 0,75-1,5 mm. Duritatea variază între 56 și 65 HRC.
Figura 5.21

TRANSMISIA AUTOVEHICULELOR
24
5.3.4. Calculul rulmenților articulației cardanice. Rulmenții utilizați la articulațiile cardanice se caracterizează printr-o mișcare
oscilatorie. Capacitatea portantă dinamică a rulmenților cu role-ace se determină cu relația:
[N] afKSC = (5.37)
în care: a - este un coeficient care ține seama de caracterul rotației; f - coeficient ce ține seama de condițiile de încărcare și funcționare; K- sarcina specifică, în N/cm2; S - suprafața echivalentă de sprijin.
Coeficientul a, pentru rulmenții cu ace cu inel exterior forjat, are valoarea: a=0,66, în cazul rotației continue; a=0,6, în cazul rotației oscilatorii.
Pentru celelalte tipuri de rulmenți cu ace coeficientul a are valorile: a=1, în cazul rotației continue; a=0,9, în cazul rotației oscilatorii.
În cazul sarcinii variabile, se recomandă: f=0,7.
Sarcina specifică K se determină în funcție de durabilitatea adoptată și de produsul nd din figura 5.22 (n fiind turația, în rot/min, iar d diametrul căii de rulare, în mm).
Valorile K determinate cu
ajutorul diagramei din figura 5.22 corespund unei durități HRC =60. Dacă duritatea este mai redusă, atunci K trebuie micșorat la K/= K⋅ν . Coeficientul ν
este dat în figura 5.23, în care curba 2 este valabilă pentru rulmenții cu inel exterior forjat, iar curba 1 pentru ceilalți rulmenți cu ace.
În general, pentru valorile extreme ale lui d și n, valorile pentru K se adoptă:
- 2max N/mm 50≤K pentru rulmenții cu inel exterior forjat;
- 2max N/mm 70≤K pentru restul rulmenților.
Suprafața echivalentă de sprijin se determină cu relația :
][cm 100
2ldS= (5.38)
Figura 5.22

TRANSMISIA AUTOVEHICULELOR
25
în care: l - este lungimea acului rulmentului, în mm .
Figura 5.23 Figura 5.24 Influența temperaturii asupra capacității portante dinamice C se ia în considerare prin
coeficientul 1ν de micșorare a acesteia ( CC 1` ν= ), conform figurii 5.24.
Capacitatea portantă statică a rulmenților cu ace se determină cu relațiile: - pentru rulmenții cu inel forjat: C0 = 0,66 K0S; (5.39) - pentru restul rulmenților: C0 = K0S (5.40)
în care: - S - este suprafața echivalentă de sprijin; - Ko = 165 [MPa] pentru rulmenții cu inel exterior forjat; - Ko = 210 [MPa] pentru restul rulmenților cu ace. În cazul în care duritatea HRC<60, valorile sarcinii specifice K0 se micșorează
( 0` `KKO ν= ) conform curbei 1 (figura 5.25) pentru rulmenții cu inel exterior forjat sau după
curba 2 pentru restul rulmenților.
Figura 5.25 Figura 5.26 Influența temperaturii asupra sarcinii specifice Ko se ia în considerare prin
coeficientul `1ν (figura 5.26) de micșorare a capacității portante statice ( 0
` CCO ν= ).

TRANSMISIA AUTOVEHICULELOR
1
CAPITOLUL 6
MECANISMELE DE TRANSMITERE A FLUXULUI DE PUTERE
LA ROTILE MOTOARE 6.1. Generalități
Rolul mecanismelor de transmitere ale fluxului de putere la roţile motoare este de a prelua fluxul de putere de la arborele secudar al schimbătorului de viteze, sau de la transmisia longitudinală şi de al transmite roţilor motoare ale autovehiculului.
Roțile autvehiculului, în funcție de natura și de mărimea forțelor și momentelor care acționează asupra lor, pot fi:
- roți motoare (antrenate): sunt roțile care rulează sub acțiunea fluxului de putere primit prin intermediul transmisiei de la motorul autovehiculului;
- roți nemotoare (conduse): sunt roțile care rulează sub acțiunea unei forțe de împigere sau tragere, de același sens cu sensul vitezei de deplasare a autovehiculului, exercitată asupra lor de cadru sau caroserie;
- roți frânate: sunt roțile care rulează sub acțiunea unui moment de frânare dezvoltat în mecanismele de frânare ale roților (frânare activă), sau de către grupul motopropulsor în regim de mers antrenat (frână de motor). În funcție de numărul roților motoare și nemotoare, autovehiculele pot fi realizate în diferite variante după cum urmează: 4x2 sau 4x4 - autovehicule cu două punți (prima cifră indică numărul total al roților și a doua numărul roților motoare), 6x2, 6x4, 6x6 - autovehicule cu 3 punți, 8x4, 8x6, 8x8 - autovehicule cu patru punți.
Punțile motoare față de cele nemotoare, asigură transmiterea fluxului de putere spre roțile motoare, în funcție de modul de organizare a tracțiunii.
De-a lungul acestui transfer, fluxul de putere suferă o serie de adaptări și anume:
- adaptare geometrică determinată de poziția relativă dintre planul în care se rotește arborele cotit al motorului și planul în care se rotesc roțile motoare:
- adaptare cinematică determinată de asigurarea rapoartelor de transmitere necesare transmisiei autovehiculului;
- divizarea fluxului de putere primit în două ramuri, câte unul transmis fiecărei roți motoare ale punții.
Pentru a îndeplini funcțiile amintite mecanismele de transmitere a fluxului de putere ale punților motoare cuprind: transmisia principală, diferențialul și transmisia la roțile motoare.
Din interacțiunea roților cu calea de rulare în procesul auto-propulsării autovehiculului asupra roților acționează, în funcție de regimul de deplasare, figura 6.1, reacțiunea normală ZR(ZF) și forțele de aderență: XR, în regimul tracțiunii, XF, în regimul frânării și YR în regimul derapării.

TRANSMISIA AUTOVEHICULELOR
2
Față de centrul roții, aceste forțe se reduc la câte o rezultantă, și un moment, numit moment reactiv:
dRR rXM =′ ; dFF rXM =′ ; dRY rYM =′ (6.1)
Figura 6.1 Puntea are rolul de a prelua toate forțele și momentele ce apar în centrul
roților autovehiculului și de ale transmite prin intermediul mecanismului de ghidare și al elementelor elastice ale suspensiei cadrului (șasiului) sau caroseriei.
După tipul mecanismului de ghidare, punțile pot fi rigide sau articulate. Punțile rigide (sau punți cu oscilație dependentă a roților) sunt punțile la
care oscilația uneia din roți influențează și poziția celeilalte roți, fără a modifica poziția relativă dintre ele.
Punțile articulate (sau cu oscilație independentă a roților) sunt punțile la care variația sarcinii verticale la una din roți determină modificarea poziției relative dintre roțile punții.
Legătura în punte dintre mecanismele fluxului de putere și mecanismul de ghidare se face prin intermediul butucului roții.
6.2. Transmisia principală Rolul transmisiei principale este de a realiza o demultipicare a turației și
amplificare a momentului motor primit de la transmisia longitudinală, și de a-l transmite prin intermediul diferențialului și arborilor planetari, roților motoare ce se rotesc în jurul unei axe dispuse sub un unghi de 900 față de axa longitudinală a automobilului.
Constructiv, transmisiile principale sunt mecanisme de tipul angrenajelor. După numărul angrenajelor se deosebesc: - transmisii principale simple, la care raportul de transmitere (i0) se
realizează printr-un singur angrenaj cu axe perpendiculare sau paralele;
X F
V
X R
M / F M
/ R
Z R (Z F )
Z R (Z F )
X F X R
r d
Y R M / Y
Y R
Z R (Z F )
Z R (Z F )

TRANSMISIA AUTOVEHICULELOR
3
- transmisii principale duble, la care raportul de transmitere (I0) se realizează prin două angrenaje inseriate, din care primul cu axe perpendiculare iar cel de-al doilea cu axe paralele:
- transmisii principale complexe la care se pot realiza două rapoarte de transmitere.
6.2.1. Construcția transmisiei principale La transmisiile principale simple și la primul angrenaj al transmisiilor
principale duble sau complexe se utilizează angrenajul de tipul: - cu roți dințate conice, hipoide sau melc-roată melcată. Celelalte angrenaje ale transmisilor principale (inclusiv transmiile
principale ale automobilelor cu motorul dispus transversal) sunt cu roți dințate cilindrice cu axe fixe sau mobile (grupuri planetare)
In figura 6.2 este prezentată schema cinematică de organizare a unei transmisii principale simple cu roți dințate conice. Are în alcătuire arborele cu pinionul de atac 2 montat în carterul 4 prin intermediul rulmenților 1, care este în angrenare permanentă cu coroana 3 montată prin șuruburile 6 pe carcasa diferențialului 7.
Fluxul de putere este primit de pinion, de la transmisia longitudinală, prin flanșa 9 și trasmis de angrenajul conic 2-3, prin intermediul diferențialului 7 la arborii planetari 5 și 8.
Figura 6.2 Figura 6.3 Pentru asigurarea calităților funcționale, în transmisia principală se prevăd
o serie de soluții constructive privind tipul danturii, rigiditatea construcției, compensarea uzurilor și poziționarea relativă a roților
Dintre tipurile de danturi ale roților dințate prezentate în figura 6.3, cea mai largă utilizare o au angrenajele conice cu dantură curbă.

TRANSMISIA AUTOVEHICULELOR
4
În comparație cu celelalte tipuri de danturi, dantura curbă asigură: - la rapoarte de transmitere egale, dimensiuni de gabarit de până de două
ori mai mici (numărul minim de dinți ai pinionului poate fi redus la 5....6 față de minim 13 la celelalte tipuri.
- la dimensiuni egale suportă încărcări mai mari datorită măriri numărului de dinți aflați simultan în angrenare;
- între dinții pinionului de atac și cei ai coroanei are loc un contact pregresiv, în acest fel eliminându-se șocurile și determinându-se o sporire a durabilității și o diminuare a zgomotului.
Ca dezavantaje putem aminti: - costul ridicat; - necesitatea unor reglaje precise la montaj și ungerea pretențioasă pentru
reducerea forțelor de frecare dintre dinți. Dintre transmisiile cu dantură curbă, cele mai răspândite sunt cele cu
dantură în arc de cerc, acestea bucurându-se de avantajul rectificării danturii pe mașini unelte de mare productivitate.
Dezavantajul acestor angrenaje îl constituie prezența unor eforturi axiale mari care își schimbă sensul la schimbarea sensului de deplasare al automobilului.
Având în vedere că această situație este de scurtă durată, atât sensul cât și valoarea forțelor axiale sunt acceptabile.
Angrenajele conice sunt foarte sensibile în ce privește condițiile de montaj, în cazul când vârfurile conurilor celor două roți nu coincid, apar concentrări de forțe pe muchiile dinților, cresc brusc tensiunile de contact și solicitările de încovoiere, cresc zgomotul, încălzirea, uzura, și se mărește considerabil posibilitatea distrugerii angrenajului.
Pentru elementele angrenajului conic, valorile deformațiilor sunt date în figura 6.4.
Figura 6.4 Asigurarea rigidității necesare este determinată de modul de montare în
carterul punții a pinionului de atac, de tipurile rulmenților utilizați și de unele soluții constructive.

TRANSMISIA AUTOVEHICULELOR
5
Asigurarea unei bune fucționări pentru transmisiile care utilizează angrenaje conice
În figura 6.5 sunt prezentate patru variante de montare a pinionului de atac. Variantele prezentate în figura 65.c și d asigură o rigiditate a transmisiei de aproximativ 30 ori mai mare decât variantele de montaj in consolă prezentate în figura 6.5.a,b.
Figura 6.5
Pentru preluarea sarcinilor axiale din angrenaj se utilizează pentru lăgăruirea pinionului cu rulmenți radiali-axiali cu role conice montați cu precădere în “O” (pentru mărirea lungimii între reazeme, ceea ce duce la mărirea rigidității radiale a pinionului).
Se utilizează de asemenea și rulmenți radial axiali cu două rânduri de bile ca în figura 6.5.b,c, care realizează rigiditate radială bună.
În ambele cazuri deformațiile axiale pot fi reduse prin stângere preliminară pe direcția axială a pieselor montate pe arborele pinionului de atac (stângere inițială 0,005-0,07 mm - care se apreciază prin mărimea momentului de înșurubare la piulițele de reglaj, sau șuruburile din capace: -1,5-2 Nm - pentru pinioane montate în consolă -0.7-0.9 Nm - pentru pinioane montate între reazeme).
În general valoarea prestângerii se stabilește în urma încercărilor efectuate la prototipuri.
1
5
2
3 6
4
4
7
1
5
1
3
2
1
d 4 5 3
c
b a

TRANSMISIA AUTOVEHICULELOR
6
Pentru realizarea prestângerii se utilizează piulițele 1 (cu sistemele de asigurare a poziției), șaibe de grosimi calibrate 2 amplasate fie între inelele interioare ale rulmenților, fie între carter și capacul lagărelor.
Monarea coroanei dințate a angrenajului conic se face în cele mai multe cazuri prin intermediul rulmenților radiali axiali cu role conice ca în figura 6.6, care pentru micșorarea lungimii între reazeme se montează în ”X”.
În timpul funcționării, organele transmisiei principale sunt supuse la deformații (solicitări) mari.
Pentru a evita aceste deformații (mai ales la autocamioane) se utilizează diverse variante constructive așa cum se vede în figura 6.7.
În figura 6.7, a, b, c sunt utilizate limitatoare care pot fi formate dintr-un tachet 4 figura 6.7 a,b, sau cu rola 4 figura 6.7,c.
Figura 6.7 Mărimea jocului J dintre limitator și suprafața frontală se alege astfel încât
intrarea în acțiune să se facă în cazul trasmiterii momentelor mari. Limitatoarele reglabile figura 6.7,b,c se utilizează când poziția coroanei
este reglabilă, cât și pentru reducerea jocurilor mari datorate uzurii din exploatare.
Figura 6.6
1 2
1
1
a
4
1
3
c
4
b

TRANSMISIA AUTOVEHICULELOR
7
La soluția prezentată în figura 6.7,b reglarea jocului se face cu ajutorul șurubului 2, iar la varianta din figura 6.7,c prin utilizarea excentricului 3 și a rolei 1.
Tabelul 6.1

TRANSMISIA AUTOVEHICULELOR
8
Asigurarea unui montaj corespunzător și a unei funcționări corecte a
angrenajului conic se obține prin reglarea jocului din angrenaj. Pentru aceasta ambele roți sunt prevăzute cu posibilitatea de a se deplasa axial.
În cazul variantelor prezenate în figura 6.5,a,c,d, rulmenții sunt montați în carterul transmisiei prin intermediul unei carcase intermediare fixată cu șuruburi, iar între flanșa carcasei și carter se montează un număr variabil de șaibe calibrate pentru a realiza deplasarea pinionului axial până la realizarea jocului corespunzător.
Varianta prezentată în figura 6.5.b realizează deplasarea axială a arborelui pinion prin intermediul unui manșon 6 fixat la poziția dorită de partea conică a șurubului 7.
În tabelul 6.1 sunt date principalele poziții ale petei de contact și modul de înlăturare a defecțiunii.
Angrenarea corectă se verifică prin metoda petei de contact dintre flancurile dinților în angrenare (se acoperă dinții pinionului cu un strat de vopsea subțire și apoi se învârte transmisia în ambele sensuri și, în funcție de mărimea și poziția petei lăsate pe dinții coroanei se apreciază calitatea angrenării).
După verificarea calității angrenării, se măsoara jocul lateral dintre dinți și care nu trebuie să depășească anumite limite, date funcție de modulul danturii în tabelul 6.2.
Tabelul 6.2 Modulul [mm] 4 6 9 12 25
Jocul dintre flancurile dinților în plan normal [mm]
0,1...0,15 0,15...0,20 0,20...0,30 0,30...0,40 0,50...0,75
Se apreciază ca fiind corectă angrenarea dacă pata lasată pe coroană este
pe minimum 60% din lungimea dintelui și cât mai aproape de vârful conului. Pentru determinarea mărimii jocului se folosește o plăcuță de plumb care
introduce între flancurile dinților și apoi se măsoară. În figura 6.8 este prezentată construcţia unei transmisii principale simple
cu angrenaje conice care are pinionul de atac 1 montat în consolă prin rulmenţii radiali-axiali cu role conice 2, direct în carterul 3 al transmisiei principale. Reglarea pinionului şi poziţionarea axială faţă de coroana 16 se realizează prin şaibele 8, piesele fiind strânse de piuliţa 5 prin flanşa 6. Prin flanşa 6, transmisia principală primeşte fluxul de putere al motorului de la transmisia longitudinală. Etanşarea lagărului este asigurată de deflectoarele 7şi 9, şi de manşeta de rotaţie 4. Coroana dinţată 16 este fixată de carcasa diferenţialului 15 cu ajutorul şuruburilor cu cap hexagonal 14. Rulmenţii radiali-axiali cu role conice 11, asigură lăgăruirea ansamblului coroană a transmisiei principale-carcasa diferenţialului în carterul central al punţii, prin semilagărele 13.
Reglajul jocului în rulmenţii radiali-axiali şi al jocului din angrenajul pinion-coroană ale transmisiei principale, se face cu ajutorul pieselor de reglaj

TRANSMISIA AUTOVEHICULELOR
9
cu caneluri frontale 10, asigurate în poziţia corespunzătoare de siguranţele basculante 12.
În figura 6.9 este prezentată o variantă similară cu cea prezentată anterior, utilizată la autocamioane de capacitate medie la care pentru asigurarea condiţiilor de funcţionare, transmisia principală (destinată transmiterii unui moment mai mare) are pinionul 1 montat între reazeme, iar pentru limitarea deformării coroanei este prevăzut tachetul reglabil 10. Coroana transmisiei principale este asamblatã de carcasa diferenţialului 4 prin niturile 9. Ansamblul coroană a transmisiei principale-carcasa diferenţialului se montează în carterul central al punţii, prin rulmenţii radiali-axiali cu role conice 3. Reglajul poziţiei
coroanei 5 faţă de pinionul transmisiei principale 1 se face cu ajutorul şaibelor calibrate 7.
Fig
ura
6.8
F
igu
ra 6
.9

TRANSMISIA AUTOVEHICULELOR
10
Din categoria angrenajelor conice cu dantură curbă fac parte și angrenajele hipoide (angrenaje cu axe geometrice neconcurente) reprezentate în figura 6.10.
Figura 6.10 Deplasarea hipoidă E a axei pinionului de atac 1 față de axa coroanei
dințate 2 poate fi făcută în două variante: - varianta din figura 6.10,a determină o coborâre a centrului de greutate a
automobilului prin coborârea transmisiei longitudinale și a cadrului sau a caroseriei;
- varianta prezentată în figura 6.10,b determină o mărire a distanței minime de sol.
Aceste angrenaje s-au impus în construcția de automobile datorită angrenării line, iar dinții fiind mai robuști suportă încărcări mai mari.
În figura 6.11 este prezentată o astfel de variantă la care după cum se observă între pinionul 1 şi coroana 2 există deplasarea hipoidă E.
Figura 6.11 Deplasarea hipoidă E la construcțiile existente variază între 40-90 mm. Prezintă dezavantajul că, datorită frecărilor suplimentare dintre flancuri,
pierderile prin frecare sunt mari, iar temperatura de funcționare mai ridicată.
1
2
2
1
a
1 2
1
2
b

TRANSMISIA AUTOVEHICULELOR
11
Acest dezavantaj poate fi diminuat printr-un reglaj și un rodaj corespunzător.
Transmisiile principale cu melc-roată melcată sunt organizate după schemele din figura 6.12.
Figura 6.12 Varianta din figura 6.12.a, cu melcul dispus sub roata melcată este folosită
în special la autobuze, permițând coborârea planșeului și îmbunătățirea accesului pasagerilor.
Varianta din figura 6.12.b, permite mărirea capacității de trecere a automobilului și micșorarea unghiului de înclinare a transmisiei principale.
a b Figura 13
În figura 13 a şi b, sunt reprezentate în secţiune, două din variantele ale căror reprezentări schematice sunt redate mai sus.
Prezintă următoarele avantaje: gabarit redus, greutate mică, rapoartele de transmitere sunt mari, funcționare silențioasă, simplifică mult transmiterea fluxului de putere în cazul autovehiculelor cu două punți motoare în spate.
Ca dezavantaje amintim: randamentul scăzut, ungerea deficitară și costurile ridicate.
Pierderile datorate frecării de-a lungul dintelui pot fi apreciate prin randamentul angrenajului, dat de relația:
2
1
2
1
b
2
1
1
2
a

TRANSMISIA AUTOVEHICULELOR
12
( )ρββη+
=mtg
tg , (6.2)
unde: mβ - unghiul de înclinare a spirei melcului, β=25-30°; ρ - unghiul de frecare (ρ =arctg ( µ - µ ′ ), µ și µ ′ - coeficienții de frecare
ai cuplului de materiale). Deși randamentul este scăzut, la aceste transmisii, prin prelucrarea roților
din bronzuri pe bază de staniu de calitate superioară, rectificare și rodarea
suprafețelor de contact, se poate ajunge chiar la randamente comparabile cu cele
ale angrenajelor cu roți dințate.
Realizarea rapoartelor de transmitere mari, necesare la autocamioanele de
mare capacitate și autobuze, se face prin utilizarea transmisiilor duble.
Dispunerea celei de a doua trepte a transmisiei poate fi făcută central într-
un carter comun cu prima treaptă figura 6.14, sau separat sub forma unei
transmisii finale la roțile motoare figura 6.15
Figura 6.14 Prima treaptă este formată din perechea de roți conice 1 și 2 iar cea de a
doua din perechea de roți cilindrice 3 și 4. Arborele intermediar 6, solidar la rotație cu roțile dințate 2 și 3, se sprijină
în carter prin doi rulmenți cu role conice 7.
4
3
2
1 2
3
6
5
4
1
8
7
2
a b

TRANSMISIA AUTOVEHICULELOR
13
Reglarea angrenajului se face pentru pinionul 1 ca în figura 6.5, iar pentru coroana 2 prin șaibe calibrate.
#n cazul variantei prezentate în figura 6.15, prima treaptă este formată din pinionul de atac 1 și coroana transmisiei principale 2, dispusă în partea centrală a punții, iar cea de-a doua - formată din angrenajul de roti cilindrice 4 și 5, dispuse în vecinătatea roții motoare 6.
Figura 6.15 Legătura cinematică între cele două trepte este asigurată de diferențial și
de arborii planetari 3. La unele construcții, treapta a doua este organizată sub forma unui
mecanism planetar ca în figura 6.16 a și b.
Figura 6.17 Aceste variante permit obținerea unor dimensiuni de gabarit mici pentru
cea de-a doua treaptă, creând posibilitatea montării acesteia direct în butucul roții motoare.
Pe arborele planetar 3, care primește mișcarea de la grupul conic 1-2, prin intermediul diferențialului, este montată roata planetară 8.
Elementul condus al mecanismului este brațul portsatelit 7, iar elementul fix este coroana 5, solidară cu carterul punții din spate 4.
a
2
6
5
4 3 2
1
3
1
5
4 b
7 8
9
6 5 4 3 2 1 2
1 5 4 3
6
7 8 9
a b

TRANSMISIA AUTOVEHICULELOR
14
Sateliții 6 se vor rostogoli pe dantura coroanei 5, imprimând brațului portsatelit o mișcare de rotație ce se transmite direct roților motoare 9.
O astfel de variantă este reprezentată în cele două proiecţii din figura 6.18.
Figura 6.18 #n cazul autovehiculelor cu capacitate mare de încărcare și trecere, la care
sarcina utilă și condițiile de deplasare variază în limite foarte largi, pentru asigurarea adaptabilității fluxului de putere ai motorului la condițiile deplasării cu economicitate maximă, se utilizează transmisiile complexe prezentate în figurile 6.19. a, b.
Acestea pot realiza două valori ale raportului de transmisie i0, dublând astfel numărul treptelor din cutia de viteze.
Figura. 6.19 Prin intermediul grupului conic 1-2 mișcarea este transmisă angrenajelor
permanente 3-4 și 6-7 prin intermediul manșonului 9 care cuplează alternativ- grupul diferențial 5-7, arborii planetari 10,11.
1 2 4 5 9
8
2 3
10 7 6
8
10 11 12
7 8 9
6
1 2 3 4
5 7
6
1 2 3 4 5
9
a b

TRANSMISIA AUTOVEHICULELOR
15
În figurile 6.20 şi 6.21 sunt prezentate două variante de transmisii principale duble cu două rapoarte de transmitere, prima cu angrenaje cu axe paralele cilindrice, iar cea de a doua cu reductor planetar.
3 4
5
2
8
1
6
9 7
Fig
ura
6.2
0
1
5 4
3 2 1
1 2
9 10
11
6
Fig
ura
6.2
1

TRANSMISIA AUTOVEHICULELOR
16
6.2.2. Calculul transmisiei principale Calculul transmisiei principale cuprinde: - calculul momentului de calcul; - calculul de dimensionare și verificare a angrenajelor de roți dințate; - calculul de dimensioanre și verificare a arborilor; - calculul rulmenților.
Calculul momentului de calcul
Ca mărime de intrare momentul de torsiune la angrenajele transmisiei
principale se calculează diferențiat: - pentru automobilele cu o punte motoare momentul de calcul se
determină cu relația: η′′= 01
iiMM cvmc (6.3)
în care: mM - momentul maxim al motorului;
1cvi - raportul de transmitere a cutiei de viteze în prima treaptă;
0i ′ - raportul de transmitere a transmisiei principale, până la angrenajul calculat (0i ′ =1 pentru calculul treptei conice și 0i ′ este raportul de transmitere a angrenajului conic pentru calculul treptei a doua a transmisiilor duble);
η′ - randamentul transmisiei de la motor la angrenajul calculat Pentru automobilele cu mai mult de o punte motoare și pentru treapta
finală a transmisiilor principale duble, când distribuția momentului motor nu este precizată, momentul de calcul se determină cu relația:
ηϕ
′′′′=
0
max
i
rZM d
c (6.4)
unde: Z - reacțiunea normală dinamică la puntea calculată; maxϕ =0,7...0,8 - coeficientul de aderență maxim; dr - raza dinamică a roții motoare; 0i ′′ - raportul de transmitere de la roțile motoare la angrenajul calculat
( 00 ii =′′ - pentru calculul angrenajului conic și 0i ′′ egal cu raportul de transmitere a treptei finale pentru calculul acesteia)
- η′′ - randamentul transmisiei de la roțile motoare la angrenajul transmisiei principale calculate.
Calculul de dimensionare și de rezistență a angrenajelor de roți dințate
conice Variația înălțimii dinților la roțile dințate conice determină o rigiditate
variabilă în lungul dinților și deci o distribuție neuniformă a sarcinii. Experimental s-a constatat că pentru calculul de rezistență a roților conice se obțin rezultate satisfăcătoare dacă roțile conice sunt asimilate cu roți cilindrice, folosind următoarele caracteristici:
- diametrul cercului de rostogolire a roții echivalente egal cu diametrul cercului de rostogolire a roții conice în secțiunea medie a dintelui;
- modulul corespunzător modulului roții conice în aceeași secțiune; - profilul dinților corespunzător profilului dinților roții echivalente.

TRANSMISIA AUTOVEHICULELOR
17
Numărul de dinți al roţilor echivalente ale angrenjului conic se determină
cu relațiile:m
ech coscos
ZZ
βδ=
21
11
, respectiv m
ech coscos
ZZ
βδ=
22
22
(6.4)
în care: Z1 - este numărul de dinți ai pinionulul de atac; Z2 - este numărul de dinți ai coroanei;
Tabelul 6.3 Notatii si relatii de calcul
Denumirea parametrului Roata conducătoare (pinion) Roata condusă (coroana)
Numărul de dinţi z1(se adoptă z1min≥5) z2=z1i Unghiul de angrenare in secţiunea normală
αn=20°; STAS 6844-63
Latimea danturii b Unghiul de inclinare al dintelui in secţiunea medie a danturii
βm –pentru roţile cu dinţi drepţi şi “zerol” βm= 0; pentru celălalte βm=35–40°.
Coeficientul inălţimii capului de referinţă normal şi frontal
ƒon=1 (STAS 6844–63); ƒof= ƒon cos β
Coeficientul jocului de referinţă la fund, normal şi frontal
( ) βω=ω−=ω cos;8068442,0 onofon STAS
Unghiul conului de divizare 2
11 z
zarctg=δ
12 90 δ−°=δ
Numărul de dinţi al roţii echivalente
mech
zz
βδ=
31
11 coscos
m
ech
zz
βδ=
32
22 coscos
Deplasarea specifică în sectiunea frontală 21 ff ξ−=ξ
Lungimea generatoarei conului de divizare
15,0sin2sin2
21
2
2
1
11 +=== izmzmzm
L fff
δδ
Adincimea de lucru a dintilor mfofe mfh 2=
Jocul la fund fof mc ω=
Inaltimea dintelui chhhh e +=== 21
Inaltimea capului )(1 foff fma ξ+= 12 aha e −=
Inaltimea piciorului 11 ahb −= 22 ahb −=
Diametrul de divizare fd mzD 11 = fd mzD 22 =
Unghiul piciorului dintelui L
barctg 1
1 =γ L
barctg 2
2 =γ
Unghiul conului exterior 211 γδδ +=e 122 γδδ +=e
Unghiul conului interior 111 γδδ −=r 222 γδδ −=r
Diametrul de virf 1111 cos2 δaDD de += 2222 cos2 δaDD de +=
Distanta de la virful conului pina la dantura 11
1
11 sin
2δ
δa
tg
DH d −= 11
1
11 sin
2δ
δa
tg
DH d −=
Grosimea dintelui pe arcul cercului de divizare
++= τ
βαξπ
m
nff f
tgmS
cos2
21 12 SmS f −= π

TRANSMISIA AUTOVEHICULELOR
18
1δ şi 2δ - unghiul conului de divizare a pinionului respectiv al coroanei ;
mβ - unghiul mediu de înclinare a dinţilor. Pe baza acestor considerente, se determină mai întâi parametrii geometrici
ai angrenajului conic cu dinţi drepţi sau curbi vezi, figura 6.22 şi tabelul 6.3. Prin analogie cu roţile dinţate cilindrice folosind relaţiile de calcul
stabilite la capitolul cutii de viteze, se vor efectua calculele de dimensionare şi verificare ale roţilor dinţate conice.
La angrenajele conice se standardizează modulul frontal (mf) STAS 822-82. Între modulul frontal şi modulul normal mediu determinat din asimilarea angrenajului conic cu unul cilindric; există relaţia:
1
1
Z
sinb
cos
mm
m
mednf
δ+
β= (6.5)
în care: b - este lăţimea de lucru a danturii (b=(0...8) mn med.
Figura 6.22
Calculul de dimensionare şi rezistenţă al angrenajelor hipoide
Calculul de rezistenţă al danturii angrenajelor hipoide se poate face după indicaţiile de la angrenajele conice, cu următoarele particularităţi:
- pentru autocamioane: 21250 Dd,E ≤ (6.7) - pentru autoturisme: 22,0 DdE ≤ Diametrul de divizare ( ) 3
2 66,0...58,0 cMDd ⋅= , în care: cM este momentul
de calcul exprimat în daN⋅cm. Limitele inferioare corespund autocamioanelor, iar cele superioare
autoturismelor. Lăţimea coroanei se determină cu relaţia:
( ) 22 3
1166,0...125,0 GDeB ≤= , (6.8)
în care: G2 este lungimea maximă a generatoarei conului de divizare a roţii
conduse.

TRANSMISIA AUTOVEHICULELOR
19
Figura 6.23

TRANSMISIA AUTOVEHICULELOR
20
Valorile inferioare se aleg pentru coroane cu diametre mari, iar cele superioare pentru coroane cu diametre mici.
La angrenajele hipoide, în afara calculului indicat mai sus, se face şi verificarea la încărcarea specifică pe 1 cm de lăţime a coroanei, cu relaţia:
2
2
Ddb
MK c
⋅= (6.9)
în care: Mc - este momentul de calcul (vezi relaţiile 6.3 sau 6.4). Dacă momentul cM s-a calculat cu relaţia (6.3), încărcarea specifică
admisibilă nu trebuie să depăşească 1150 [MPa] pentru autotrurisme, iar pentru autocamioane 1800 [MPa], la dispunerea pinionului în consolă, respectiv 2300 [MPa] la dispunerea pinionului între reazeme.
Dacă cM s-a calculat cu relaţia (6.4), încărcătura specifică admisibilă are
valorile: 600÷750 [MPa] la autoturisme şi 1900÷2100 [MPa] la autocamioane. Parametrii geometrici (figura 6.23), pentru angrenajele hipoide se
calculează cu relaţiile din tabelul 6.4. Tabelul 6.4
Denumirea parametrului Notaţii Relaţii de calcul Numărul de dinţi ai pinionului (z1) fa2
Coeficientul înălţimii capului dintelui roţii conduse
fa2
6 7 8
9….20
0,110 0,113 0,150 0,170
Modulul normal mediu mnmed 1
1
1
2 coscos12
mmed
mmed
nmed z
D
z
Dm ββ ==
Jocul radial j 1,0125,0 += ihj
hI- inălţimea de lucru a dintelui
Inaltimea totala a dintelui h jhh i +=
Inaltimea piciorului b jab += 21
medna mfb 22 =
Înălţimea capului a ( ) nmeda mfbha ⋅−=−= 211 9,1
( ) nmeda mfa ⋅−= 22 137,2
Unghiul capului dintelui,în rad. 2eγ - pentru 91 ≥z 22
22 cossin
2m
ae z
fy βδγ =
- pentru 81 ≥z 222
2 cossin6,1
ma
e z
fy βδγ =
Unghiul piciorului dintelui, în rad. 2iγ
- pentru 91 ≥z 222
2 cossin2
ma
i z
fy βδγ =
- pentru 81 ≥z 222
2 cossin6,1
ma
i z
fy βδγ =
Unghiul conului de divizare, în rad.
1δ εδδ coscossin 21 ⋅=
Unghiul dintre proiecţia normalei şi axa roţii conduse ϕ
ϕδϕ
cos122 medmed RtgR
Etg
+=
Tabelul 6.4 (continuare)

TRANSMISIA AUTOVEHICULELOR
21
Denumirea parametrului Notaţii Relaţii de calcul Valoarea aproximativă dintre proiecţia normalei şi axa roţii conduse
ϕ ′ 122 medmed RtgR
Etg
+=′
δϕ
Unghiul dintre proiecţia normalei şi axa pinionului
ε 2sin δϕε tgtg ⋅=
Lungimea medie a generatoarei conului de divizare
Gmed 1
1.1. sinδ
medmed
RG =
2
22. sinδ
medmed
RG =
Diferenţa dintre unghiurile spiralei roţii conduse şi pinionului
µ 21cos δδµ tgtg ⋅=
Unghiul dintelui pinionului
1.medβ µ
βsin
1cos
1k
Ktg med
−=
Unghiul conului de divizare al roţii conduse 2δ δδ K
z
z
d
Ectg
e 2
12
6 ⋅=
Unghiul dintelui roţii conduse
2medβ µ
µβ
sin
1cos
2ktg med
−=
Lungimea maximă a generatoarei conului de divizare al roţii conduse G2
222
BGG med +=
Lungimea minimă a generatoarei conului de divizare al roţii conduse 2mG
222
BGG medm −=
Diametrul exterior al pinionului De1
++= 1111
11 cossin2
2 δδ aB
RD mede
Diametrul exterior al roţii conduse De2 ( )22222 cossin2 δδ bGDe +=
Distanţa de la planul mediu al roţii conduse la axa pinionului
l2 ϕcos12 medRl =
Distanţa de la planul mediu al pinionului la axa roţii conduse
l1 εcos21 medRl =
Calculul arborilor transmisiilor principale Calculul arborilor transmisiilor principale cuprinde: - determinarea
schemei de încărcare a arborilor, calculul reacţiunilor, calculul momentului de torsiune şi încovoiere, determinarea diametrului şi verificarea la rigiditate, şi calculul pentru determinare a rulmenţilor. Determinarea schemei de încărcare a arborilor
Determinarea schemei de încărcare a arborilor presupune mai întâi determinarea forţelor din angrenajele transmisiei.
Pentru calculul forţelor transmise la arbori de către roţile în angrenare se consideră forţa normală de angrenare Fn care acţionează la mijlocul dinţilor (figura 6.22), cu cele trei componente: tangenţială Ft, radială Fr şi axială Fa.
Pentru roţi dinţate conice cu dantură dreaptă, relaţiile de calcul sunt următoarele:

TRANSMISIA AUTOVEHICULELOR
22
- forţele normale: αα cos
2
cos2,1
21
2,1
,
m
ctn Dd
MFF == ; (6.10)
- componentele tangenţiale: 2,1
2,1
2,1
2
m
c
t Dd
MF = ; (6.11)
- componentele radiale: 2,1cos2,12,1
δαtgFF tr = ; (6.12)
- componentele axiale: 2,1sin2,12,1
δαtgFF ta = (6.13)
La angrenajele conice cu dantură dreaptă, componenta radială Fr acţionează spre axa roţii, iar componenta axială Fa acţionează dinspre vârful conului de divizare spre roată.
Pentru angrenaje de roţi dinţate având danturi înclinate sau curbe (figura 6.24), forţa normală se determinată cu relaţia:
nmm
c
n coscosDd
MF
,
,
αβ=
21
212
(6.14)
care se descompune în componentele Ft, Fr, Fa, şi care se determină cu relaţiile:
21
21
21
2
,
,,
,
m
c
t Dd
MF = (6.15)
( )m
mntr
tgFF
βδβδα
cos
sinsinsin 2,12,1
2,1
±−= (6.16)
( )m
mnta
tgFF
βδβ±δα
=cos
cossinsin 2,12,1
2,1 (6.17)
Semnul ± din relaţii, este stabilit în funcţie de sensul de înclinare a danturii şi sensul de înclinare a dinţilor şi de sensul de rotire al roţilor, conform tabelelor 6.6 şi 6.7.
Figura 6.24

TRANSMISIA AUTOVEHICULELOR
23
Pentru deplasarea înainte a autovehiculelor având înclinarea spre dreapta a dintelui pinionului de atac, schema de încărcare a arborilor pentru determinarea reacţiunilor din lagăre este prezentată în tabelul 6.8. Calculul reacţiunilor din lagărele prin care se montează în carterul transmisiei principale se utilizează aceeaşi metodologie ca şi în cazul arborilor cutiilor de viteze. Tabelul 6.6
La roata conducătoare 1 (pinion) Sensul
Semnul folosit în relaţia pentru Schema De înclinare a
dinţilor De rotire a roţilor Fa1 Fr1
Dreapta Sens orar (dreapta) + -
Dreapta Sens antiorar (stânga) + -
Stânga Sens orar (dreapta) - +
Stânga Sens antiorar (stânga) + -
Tabelul 6.7 La roata condusă 2 (coroană)
Sensul Semnul folosit în relaţia pentru
Schema De înclinare a dinţilor
De rotire a roţilor Fa2 Fr2
Stânga Sens antiorar (stânga) - +
Stânga Sens orar (dreapta) + -
Dreapta Sens antiorar (stânga) + -
Dreapta Sens orar (dreapta) - +
Pentru calculul reacţiunilor axiale care acţionează asupra rulmenţilor cu role conice se folosesc, în funcţie de tipul montajului utilizat, relaţiile din tabelul

TRANSMISIA AUTOVEHICULELOR
24
6.9. Coeficienţii y, funcţie de limita raportului RV
Fe a
⋅= , au valorile: y=0
pentru RV
Fa
⋅<e şi y=0,4ctgα, pentru
RV
Fa
⋅>e, unde:
Fa - este forţa axială din arbore; R - este rezultanta geometrică a reacţiunilor Z şi Y (tabelul 6.8); α - este unghiul nominal de contact (unghiul dintre direcţia de acţionare a
sarcinii pe bile şi un plan perpendicular pe axa rulmentului) Tabelul 6.8
Shema angrenajului Schema de încărcare pentru determinarea reacţiunilor din
lagăre Observaţii
Reacţiunile axiale din rulmenţii conici (XA, XB, XC, Xc) se calculează după indicaţiile din tabelul 6.9
Reacţiunile din lagărele C şi D se determină după schema 1,b.
F1=Fa3
F2=Fr3cosγ+Ft3sinγ F3=Ft3osγ+Fr3sinγ
Reacţiunile din lagărele C şi D se determină după schema 1,b. Reacţiunile din lagărele Eşi F se calculează după schema 1,b, unde forţele din angrenajul conic se înlocuiesc cu forţele din angrenajul cilindric (Fd3, Fr3, Ft3)
Pentru verificarea rigidităţii transmisiei principale, pe baza schemelor din
tabelul 6.8, se procedează ca şi în cazul arborilor din cutiile de viteze. Săgeţile
obţinute se compară cu limitele recomandate în figura 6.4

TRANSMISIA AUTOVEHICULELOR
25
Având reacţiunile din reazeme, se face calculul pentru alegerea
rulmenţilor după aceeaşi metodologie ca şi în cazul lagărelor pentru arborii
cutiilor de viteze. Tabelul 6.9
Tipul montajului Conditii de incarcare Sarcini axiale
a
B
B
a
a
Y
R
Y
R ≥
0≥aF
A
AA Y
RX
5.0=
AaB XFX +=
Montaj în "O"
b
B
B
A
A
Y
R
Y
R<
−≥
A
A
B
Ba Y
R
Y
RF 5.0
A
AA Y
RX
5.0=
AaB XFX +=
Montaj în "X"
a
B
B
A
A
Y
R
Y
R<
−<
A
A
B
Ba Y
R
Y
RF 5.0
ABA FXX −=
A
AB Y
RX 5.0=
Montaj în "O"
a
B
B
A
A
Y
R
Y
R≤
0≥aF
ABA FXX +=
B
BB Y
RX 5.0=
a
B
B
A
A
Y
R
Y
R>
−≥
B
B
A
Aa Y
R
Y
RF 5.0
ABA FXX +=
B
BB Y
RX 5.0=
Montaj în "X"
b
B
B
A
A
Y
R
Y
R>
−<
B
B
A
Aa Y
R
Y
RF 5.0
A
AA Y
RX
5.0=
AAB FXX −=

Curs 6 – Puntea fata
1
PUNTEA DIN FAŢĂ
Rolul, condiţiile impuse şi clasificarea punţilor din fa ţă
Puntea din faţă are rolul de a prelua şi transmite cadrului sau caroseriei
forţele şi momentele ce apar din interacţiunea dintre roţi şi calea de rulare şi de a permite schimbarea direcţieie de deplasare a autovehiculului. La automobilele cu ″tracţiune integrală″ sau la cele organizate după soluţia ″totul în faţă″, puntea din faţă este şi motoare, realizând transmiterea fluxului de putere a motorului la roţi.
Puntea din faţă trebuie să îndeplinească următoarele condiţii: - să fie suficient de rezistentă;
- să asigure o bună stabilitate a roţilor de direcţie; - să asigure cinematică corectă a direcţiei la oscilaţiile autovehiculului
datorită deformaţiilor elastice ale suspensiei; - să aibă o uzură mică a părţilor componente;
- să aibă o greutate proprie cât mai mică pentru a reduce cât mai mult greutatea nesuspendată a autovehiculului.
Clasificarea punţilor se face după următoarele criterii: 1) După rolul pe care îl au sunt: - punţi de direcţie; - punţi de direcţie şi motoare. 2) După tipul mecanismului de ghidare: - punţi rigide - cu oscilaţie dependentă a roţilor; - punţi articulate - cu oscilaţie independentă a roţilor. Constructiv punţile motoare cuprind următoarele elemente: - mecanismele transmiterii fluxului de putere la roţile motoare (transmisia
principală, diferenţialul, arborii planetari şi butucii roţilor); - mecanismul de ghidare a roţilor pentru preluarea şi transmiterea forţelor
şi momentelor reactive între roţi şi cadru sau caroserie; - fuzetele şi pivoţii prin care acestea se articulează de mecanismul de
ghidare cu posibilitatea de oscilaţie într-un plan orizontal, necesară schimbării direcţiei de mers.
Pentru puntea din faţă nemotoare, construcţia se simplifică prin eliminarea mecanismelor de transmitere a fluxului de putere.
Construcţia punţilor de direcţie Puntea de direcţie rigidă Puntea din faţă rigidă (osia din faţă rigidă) se compune dintr-o grindă, la
capetele căreia sunt montate articulat cu ajutorul pivoţilor, două fuzete. Se deosebesc două forme constructive: - puntea din faţă având capetele grinzii sub formă de furcă, figura 1. a; - puntea din faţă având capetele grinzii sub formă de pumn, figura 1. b.

Curs 6 – Puntea fata
2
Figura 1
Grinda sau osia are o secţiune în formă de ″I″ sau circulară, capetele grinzii de care se articulează fuzetele sunt realizate în două variante constructive: în formă de pumn sau în formă de furcă.
În scopul de a coborî centrul de greutate a autovehiculului, grinda are partea centrală arcuită (curbată) în jos.
În cazul variantelor cu grindă secţiune circulară, capetele se realizează separat prin forjare, fixarea în corpul tubular realizându-se prin presare şi sudare.
Grinda mai este prevăzută cu două suprafeţe de sprijin pe partea superioară necesare pentru fixarea arcurilor suspensiei.
Fuzetele sunt articulate prin intermediul pivoţilor de grindă. Constructiv, aşa cum se obsevă în figura 1. a şi b, se deosebesc două forme constructive de fuzete: fuzete pumn, fuzete furcă.
După cum rezultă din figura 1, fuzeta se compune din două părţi cilindrice de diametre diferite, pe care se montează rulmenţii exteriori şi interiori ai butucului roţii, legate printr-o porţiune tronconică. De asemenea, fuzeta are şi o porţiune filetată pe care se înşurubează piuliţa de fixare a butucului roţii. Cea mai utilizată este fuzeta furcă, cea sub formă de pumn fiind pe cale de dispariţie, deoarece realizarea furcii în grindă se face mai greu, iar înlocuirea bucşelor şi a bolţurilor se face mai dificil.
Montarea butucilor roţilor de direcţie pe fuzete se realizează prin intermediul rulmenţilor cu bile pentru autoturisme şi a rulmenţilor cu role conice pentru autocamioane.
Fuzeta care se găseşte pe partea volanului este prevăzută cu un braţ de comandă a fuzetei, articulat de bara longitudinală de direcţie care comandă cealaltă fuzetă prin intermediul unui levier fixat pe ea.
Pivoţii servesc la articularea fuzetelor de grinda punţii.

Curs 6 – Puntea fata
3
La fuzeta pumn, pivotul se fixează de fuzetă, iar la fuzeta furcă pivotul se fixează de osia propriu-zisă. Fixarea lor se face cu ajutorul unor bolţuri sau pene transversale.
Pentru a reduce frecarea între bolţ (pivot) şi alezajele furcilor se folosesc bucşi intermediare de bronz sau rulmenţi cu role ace.
La automobilele moderne, tot pentru a reduc frecarea, sprijinirea punţii pe fuzetă se face prin intermediul unui rulment axial cu bile sau cu role.
Ungerea elementelor articulate se face printr-un gresor montat în general la capătul superior al pivotului.
Etanşările de protecţie ale suprafeţelor de lucru se realizează cu garnituri de etanşare.
Puntea de direcţie articulată Aceste punţi sunt cu suspensie independentă şi se utilizează la autoturisme
şi la unele variante de autobuze mai confortabile (mai rar la autocamioane).
a b
c Figura 2
Constructiv sunt alcătuite din mai multe braţe fixate de cadru sau de caroserie şi de care este fixată fuzela prin intermediul unor articulaţii sferice sau cilindrice.
În figura 2 a, b, c, sunt reprezentate trei variante constructive de sisteme de fixare a fuzetelor.

Curs 6 – Puntea fata
4
Fixarea braţelor de cadru sau caroserie se face prin intermediul articulaţiilor cilindrice figura 2 a, b; la varianta figura 2 c, atât fuzeta cât şi braţele fuzetei sunt fixate prin articulaţii cilindrice.
Construcţia Punţile de direcţie şi motoare Aceste punţi sunt de asemenea: - punţi de direcţie motoare articulate (figura 3); - punţi de direcţie motoare rigide (figura 4). Structural, aceste punţi au în alcătuire, pe lângă elementele descrise la
punţile de direcţie nemotoare, elementele de transmitere a fluxului de putere la roţi.
Aceste elemente sunt: - cuplajele unghiulare; - cuplajele axiale; - cuplajele unghiular-axiale. Descrierea acestora este redată parţial la capitolul transmisii longitudinale
(articulaţii cardanice sau bicardanice) şi în lucrarea de laborator nr.10.
Figura 3

Curs 6 – Puntea fata
5
Figura 4

Curs 6 – Puntea fata
6
Stabilitatea roţilor de direcţie Prin stabilitatea roţilor de direcţie se înţelege păstrarea de către automobil
a direcţiei rectilinii de deplasare şi revenire fără intervenţia conducătorului în această poziţie, după efectuarea oricărei schimbări de direcţie.
Neîndeplinirea acestor condiţii presupune o manevrare continuă a volanului, ceea ce conduce la obosirea conducătorului.
Pentru asigurarea stabilităţii roţilor de direcţie, pivoţii şi fuzetele se montează cu înclinări faţă de axele autovehiculului (planul longitudinal şi transversal).
La puntea de direcţie se deosebesc următoarele unghiuri: La pivoţii fuzetelor se deosebesc două unghiuri: - unghiul de înclinare longitudinală (unghiul de fugă β); - unghiul de înclinare transversală (unghiul δ). La fuzetă se deosebesc de asemenea două unghiuri: - unghiul de cădere sau de carosaj (unghiul de înclinare a roţii în plan
transversal α); - unghiul de convergenţă (unghiul de înclinare a roţii în plan longitudinal
γ). Unghiul de fugă - reprezintă înclinarea faţă de verticală a axei pivotului
măsurată în plan longitudinal. Mărimea unghiului poate fi exprimată prin distanţa a=r tgβ (figura 4 a).
a b Figura 4
Dacă un automobil se deplasează în curbă (figura 4 b), în centrul său de greutate acţionează forţa centrifugă Fc, echilibrată de reacţiunile laterale Y1, Y2 la punţile autovehiculului şi aplicate în punctele de contact ale roţilor cu calea.
Datorită înclinării longitudinale a pivotului, reacţiunea Y1 cu componentele Y1s şi Y1d (ale roţilor din stânga respectiv din dreapta din faţă) dau naştere la un moment stabilizator Ms dat de relaţia: ( ) ( ) β⋅⋅+=⋅+= tgrYYaYYM d1s1d1s1s

Curs 6 – Puntea fata
7
Acest moment stabilizator caută să readucă roţile în poziţia de mers în linie dreaptă.
Efectul stabilizator al unghiului de fugă dat, determinat de reacţiunile laterale ce apar frecvent la deplasarea în viraje depinde de viteza de deplasare a autovehiculului. De aceea acest moment poartă denumirea şi de moment stabilizator de viraj.
Prezenţa unghiului de fugă face ca manevrarea autovehiculului să se facă greoi, din care cauză există tendinţa de micşorare a lui. Micşorarea unghiului de fugă este compensată prin utilizarea pneurilor cu elasticitate mare, la care centrul geometric al contactului roată-sol este avansat centrului reacţiunilor.
În tabelul 1 sunt date valorile unghiului de fugă pentru câteva tipuri de automobile (0°-10°).
Tabelul 1 Unghiurile de înclinare ale
pivoţilor Tipul
autovehiculului
Unghiul de cădere a roţilor
α
Convergenţa roţilor s-f
mm Unghiul de
înclin. longit. al
pivotului β
Unghiul de înclin. trans. al
pivotului δ Dacia 1100 1°40′ 1 7° 9°30′ Dacia 1300 1°40′ 0 4° 8° Dacia NOVA 0O+30/ 0 2O+30/ 12O45/+30/
ARO 10 1o 1,5-3,0 2o 8o
ARO 24 1o 1,5-3,0 2o 10o
CIELO -25/+ ESPERO NUBIRA TICO M 461 1° 1,5-3 1° 10° TV 41 1° 1,5-3 5° 8° TV 51 1° 1,5-4 0° 11° TV 2 1°30′ 12 3° 8° SR 131 1° 1,5-3 2°30′ 5°30′ SR 132 0°45′ 1,5-3 3° 5°30′ Moskvici 407 0°30′ 1,5-2,5 1° 7°20′ Volga M 21 0°30′ 1,5-3 1° 6°20′ Ford-Zodiac 0°30′ 1,5-3 1° 4° Austin A 40 1° 1,5-3 3° 6°30′ Renault 16 1°40′ 6-7 - 4° Fiat 600 1° 1 - 9° Fiat 850 2°10′ 3 - 9° Fiat 1100 0°50′ 2 - 6° Fiat 1300 0°50′ 3 - 3°50′ Fiat 1500 1° 3 - 3°50′ Skoda 1000 MB 1°50′ 4-6 - 7°

Curs 6 – Puntea fata
8
Unghiul de înclinare transversală a pivotului (δ) Este unghiul format de axa pivotului şi verticală, măsurat în plan
transversal (figura 5.a). Unghiul δ determină o reducere a distanţei b (denumită braţul de rulare al roţii) dintre punctul de contact al roţii cu claea şi punctul de intersecţie al axei pivotului cu calea, adică micşorarea ommentului necesar virării.
a b Figura 5
În acelaşi timp, datorită virării roţii în jurul unui pivot înclinat, acestea tind să se deplaseze în jos (figura 5.b pentru cazul bracării roţilor cu 180°) cu mărimea h.
În realitate are loc o ridicare a părţii din faţă a autovehiculului cu mărimea h. Sub acţiunea greutăţii autovehiculului ce revine punţii din faţă, roţile tind să revină în poziţia corespunzătoare mersului în linie dreaptă. Deoarece efectul stabilizator al unghiului δ depinde de greutatea autovehiculului ce revine punţii, momentul stabilizator se întâlneşte şi sub denumirea de moment stabilizator de greutate.
Faţă de efectul stabilizator al unghiului de fugă, cel al unghiului de înclinare transversală a pivotului se manifestă independent de viteza de deplasare a autovehiculului.
La automobilele actuale acest unghi are valori cuprinse între 3° şi 9° (tabelul 1).
Unghiul de cădere sau de carosaj (α) Este unghiul de înclinare a fuzetei (al roţii) în plan transversal (figura 5.b).
El se realizează ca o măsură prealabilă de preluare a jocurilor ce apar în lagărele roţilor şi ale fuzetelor.
Datorită unghiului de cădere la roată, apare o forţă axială care tinde să împingă butucul roţii către interior şi ceea ce face să dispară jocul din rulmenţi şi descarcă piuliţele de fixare din capătul fuzetei. De asemenea unghiul de cădere contribuie la micşoarea braţului de rulare al roţii (b), ducând la uşurarea manevrabilităţii.

Curs 6 – Puntea fata
9
Ca efecte negative ale acestui unghi sunt uzura pneurilor pe banda exterioară şi tendinţa de rulare a roţilor spre exteriorul autovehiculului.
Valorile acestui unghi sunt cuprinse între 0°30′ şi 1°30′ (vezi tabelul 1). Mărimea unghiului de cădere se corelează cu cea a unghiului de
convergenţă, astfel ca în rulare roţile punţii să devină paralele. Unghiul de convergenţă (γ) Este unghiul de înclinare a roţilor în plan longitudinal (figura 6).
Figura 6 Mărimea convegenţei se exprimă de obicei prin diferenţele distanţelor f şi
s dintre planele jantelor, în plan orizontal, măsurate înaintea şi în spatele punţii. Se prevede ca o măsură de eliminare a jocurilor din sistemul de direcţie şi
pentru evitarea tendinţei de deschidere a roţilor înclinate cu unghiul de cădere α. La automobilele cu puntea din faţă motoare unghiul de convergenţă γ are
valori negative (unghi de divergenţă), deoarece forţa motoare creează în pivot un moment care tinde să închidă roţile. Valorile unghiului de convergenţă sunt cuprinse între limitele γ=0°10′...0°30′ (vezi tabelul 1).
Valorile greşite duc la uzura mărită a pneurilor şi la creşterea rezistenţei la înaintare.
MECANISMUL DE GHIDARE AL PUNTII DIN FATA
Punti rigide Caracteristic puntilor rigide este faptul că, la trecerea uneia din roţi peste
o denivelare a căii de rulare, are loc o înclinare a întregii punţi, astfel ca poziţia relativă dintre roţile punţii rămane neschimbată .
Constructiv, puntea rigidă se obţine prin articularea fuzetelor cu ajutorul pivoţilor 1 de grinda rigidă 2, ghidata faţă de cadrul 4 sau caroserie (figura 7) de obicei prin intermediul arcurilor în foi 3 ale suspensiei .

Curs 6 – Puntea fata
10
Figura 7
Cinematica punţilor rigide Dacă SA şi dA sunt centrele suprafeţelor de contact ale roţilor din stînga şi
dreapta ale punţilor cu calea, la trecerea roţii din stînga cu raza dinamică dr , peste o denivelare h a căii, întreaga punte cu ecartamentul B va executa o mişcare de rotaţie în jurul punctului dA .
În figura 8 s-a considerat un model simplificat al punţii rigide, într-un sistem de axe de coordonate zOy cu originea în punctul SA .
Figura 8 De asemenea, s-au considerat unghiurile roţilor şi pivoţilor nule. Dacă z este înălţimea denivelării atunci punctul SA , care se deplaseză pe
cercul de rază B ajunge în 'SA , iar SC ( corespunzător centrului roţii ), care se
deplasează pe cercul de rază 2d
2 rB + , ajunge în punctul 'SC .
În sistemul de axe considerat,deplasarea punctului SA este:
AY =B - 22 zB − =
−−2
B
z11B
As
Cs
rd
h
1 2 3 4 1 3
As≅O Ad
Cs
B
rd
z
z
y A
C's
yC
z
y
A's

Curs 6 – Puntea fata
11
Dezvoltând în serie binomială, radicalul rezultă
2
B
z1
− =1- ...B
z
16
1
B
z
8
1
B
z
2
1 642
−
−
−
Luând în consideraţie primi doi termeni ai seriei, rezultă pentru deplasarea
laterală a centrului suprafeţei de contact SA relaţia:B2
zY
2
A = (1)
Deci la puntea rigidă, în cazul trecerii roţilor peste denivelări, are loc o modificare a ecartamentului cu mărimea AY . Dacă această deplasare este mai mare decât deformaţia laterală a pneului, are loc o alunecare între roţi şi cale. Aceste alunecări frecvente determină, în afară înrăutăţirii stabilităţii automobilului, o sporire a uzurii pneurilor .
Procedând asemănător pentru deplasarea centrului roţii SC , se obţine
pentru deplasarea laterală CY expresia 2d
2d
2d
2
CrB
rz
rB2
zY
+
⋅++
= (2)
Ca urmare a deplasării laterale, roata considerată iniţial cu unghiul de
cădere 0=α se va înclina cu un unghi de cadere:d
AC
r
YY −=α , sau înlocuind
deplasările AY şi cY se obţine:
+−−
+=
2d
2d
2
2d
2 rB
1
B
1
r2
z
rB
zα (3)
Variaţia unghiului de cădere în funcţie de ridicarea roţii se obţine din ecuaţia (3) prin derivarea ei în funcţie de z, adică
+−−
+=
2d
2d
2d
2 rB
1
B
1
r
z
rB
1
dz
dα (4)
Figura 9
Această variaţie continuă a unghiului de cădere determină apariţia la roţile
punţii a unui moment giroscopic, al cărui efect este o oscilaţie permanentă de rotire a roţilor în jurul pivoţilor şi care lasă pe drum o urmă sinusoidală (şerpuită) cunoscută sub denumirea shimmy (figura 9).

Curs 6 – Puntea fata
12
Din analiza relaţiilor 1 şi 4 rezultă că variaţia ecartamentului şi unghiului de cădere este cu atât mai mică cu cât ecartamentul punţii şi razele dinamice ale roţii sunt mai mari.
De asemenea, efectul giroscopic rezultat este cu atât mai mare cu cât viteza unghiululară de rotaţie a roţilor este mai mare. De aceea, punţile rigide se utilizează cu precădere, datorită construcţiei simple, la autocamioane, care fiind caracterizate de ecartamente, ampatamente mari şi roţi cu raze mari au o stabilitate satisfăcătoare.
Punţi articulate Constructiv, punţile articulate sunt organizate după schemele cinematice
din fig. 10 şi anume : - punţi cu deplasare verticală a roţii paralel cu pivoţii fig. 10a - cu bare de oscilaţie (punte pendulară figura 10.b); - cu patrulater cu braţe inegale (figura 10.c), cu manivelă – culisă oscilantă
(figura 10.d) - punţi cu deplasare în plan longitudinal: cu o bară de oscilaţie (figura 10.e)
sau cu patrulater (figura 10.f)
d e f
Figura 10
Punţi cu deplasare verticală a roţilor paralel cu pivoţii sau punţi ghidate telescopic (figura 10.a).
Cinematic, un asemenea mecanism de ghidare, asigură la trecerea roţii peste denivelări menţinerea neschimbată a poziţiei unghiulare a roţii faţă de axa automobilului, precum şi a ecartamentului şi ampatamentului automobilului.
Datorită dificultăţilor de realizare a ghidării, soluţia este practic nefolosită. Punţi articulate cu bară de oscilaţie. După planul de dispunere al barei de
oscilaţie se deosebesc două soluţii, şi anume: punte pendulară transversal (figura 10.b) şi punte cu oscilare în plan longitudinal (figura 10.c). La puntea pendulară,

Curs 6 – Puntea fata
13
cinematic, roata se comportă ca si la puntea righidă cu deosebirea că lungimea barei de oscilaţie este mult mai mică decât ecartamentul.
Ca urmare, atât deplasarea laterală a feţei de contact cât şi unghiul de cădere variază în limite largi. De aceea, o asemenea soluţie nu se foloseşte la puntea din faţă, fiind mai dezavantajoasă decât puntea rigidă .
Dacă bara este dispusă longitudinal, atunci are loc o variaţie a ampatamentului şi a unghiului de fugă .
Cum variaţia ampatamentului se face prin rularea roţii, iar acţiunea stabilizatoare a unghiului de fugă se manifestă numai în viraj, asemenea tipuri de mecanisme de ghidare au căpătat, datorită simplităţii constructive, utilizare în construcţia autoturismelor.
Punţi articulate cu mecanism patrulater
În figura 11.a este reprezentată schema cinematică a unui mecanusm de
ghidare cu patrulater.
Figura 11
Pentru simplificare, s-a considerat roata cu raza dinamică dr , comună cu biela 21CC a mecanismului de ghidare şi fără înclinări inţiale.
Dacă z este înalţimea denivelării, deplasările laterale 1CY şi 1CY ale capetelor manivelelor 11CO şi 22CO sunt definite de relaţiile:
11
2
1C R
Za
R2
ZY +=
22
2
2C R
Zb
R2
ZY −= (5)
Pentru determinarea deplasării laterale AY a centrului suprafeţei de contact
SA dintre roată şi cale din fig. 5b se obţine:
2
1
A2C
A1C
H
H
YY
YY =−−
(6)
din care 1C21
22C
21
1A Y
HH
HY
HH
HY
−−
−= (7)

Curs 6 – Puntea fata
14
Înlocuind în relaţiile 7 relaţiile 5 deplasarea AY va fi exprimată în funcţie de variaţia parametrilor geometrici ai mecanismului de ghidare şi în funcţie de Z prin relaţia:
( )
−
−+
−
−=
1
2
2
1
211
2
2
1
21
2
A R
aH
R
bH
HH
Z
R
H
R
H
HH2
ZY (8)
Valoarea unghiului de cădere α rezultat, exprimată în radiani figura 5.b este
dată de relaţia: 21
2C1C
HH
YY
−−=α (9)
Substituind valorile 1CY şi 2CY din relaţiile 5 şi 6 rezultă :
( )
−
−+
−
−=
212112121
2
R
b
R
a
HH
Z
R
1
R
1
HH2
Zα (10)
sau variaţia unghiului de cădere
( )
−
−+
−
−=
212112121 R
b
R
a
HH
1
R
1
R
1
HH
Z
dz
dα (11)
Dacă 21 RR = şi a=b (braţele paralele şi egale) din relaţiile 10 şi 11 se obţine
α=0 ; 0dz
dx = (12)
Deci, la punţile cu paralelogram deformabil, la trecerea roţilor peste denivelări are loc o deplasare plan paralelă a roţii
În acest caz pentru deplasarea laterală AY , din relaţia 8 se obţine
11
2
A R
a2
R2
ZY += (13)
Datorită valorii mari a deplasării laterale a suprafeţei de contact comparabilă cu cea a punţilor pendulare, punţile cu paralelogram deformabil, chiar dacă asigură invariabilitatea unghiului de cădere nu sunt folosite.
În cazul în care a=b şi 1
2
2
1
R
H
R
H = , din relaţia 8 rezultă că 0YA = deci
ecartamentul punţii rămâne invariabil. Pentru acest caz unghiul de cădere obţinut din relaţia (10) este:
1111
2
RH
Za
RH2
Z +=α (14)
Cum Z<< 11siRH , pentru cazul considerat variaţia unghiului de cădere este mică, fără influenţă deosebită asupra stabilităţii roţilor punţii la deplasarea rectilinie. De aceea acest tip de macanism de ghidare a căpătat o largă utilizare în construcţia punţilor din faţă articulate.

Curs 6 – Puntea fata
15
Punţi articulate cu mecanism manivelă-culisă oscilantă
În figura 12 este reprezentată schema cinematică a unui mecanism de ghidare manivelă-culisă oscilantă.
Figura 12 Mecanismul este format din biela 1 comună cu fuzeta 2 a roţii, manivela 3
şi culisa 4 legată la baza 21OO a mecanismului prin articulaţia 2O . S-a considerat roata cu raza de rulare dr fără înclinări iniţiale ale fuzetei şi pivotului.
Dacă Z este înalţimea denivelărilor, deplasarea laterală a centrului roţii este
1
2
c R2
ZY = (15) iar a centrului suprafeţei de contact
αα dCdCA rYsinrYY +≅+= (16), unde α, în radiani, este unghiul de cădere rezultat, definit de relaţia:
ZL
1
R2
Z
ZL
Y
01
2
0
c
−⋅=
−=α (17)
Înlocuind unghiul de cădere dat de relaţia (17) în relaţia (16) se obţine pentru deplasarea laterală a centrului suprafeţei de contact relaţia:
−+=
ZL
r1
R2
ZY
0
d
1
2
A (18)

Curs 6 – Puntea fata
16
Din relaţiile (17) şi (18) se observă că prin alegerea corespunzătoare a lungimilor L0 şi R1, atât modificarea ecartamentului AY cât şi modificarea
unghiului de cădere α pot fi foarte mici, astfel că mecanismul manivelă-culisă oscilantă asigură cinematica corectă roţiilor punţii. Datorită dificultăţii de ghidare prin tija amortizorului soluţia este limitată la autoturisme mici şi mijlocii.
Calculul punţii din fa ţă
Calculul de rezistenţă al punţii din faţă cuprinde : - determinarea forţelor ce acţionează asupra punţii - calculul solicitărilor în elementele componente
Determinarea forţelor ce acţionează asupra punţii din faţă
Schema de încărcare pentru cele patru regimuri caracteristice de încărcare
este prezentată în figura 13.
Figura 13 Se observă că forţele ce acţionează asupra punţii sunt analoage cu cele care
acţionează asupra punţii din spate şi în continuare se dau valorile acestora în funcţie de regimul de deplasare.
În regimul tracţiunii. Reacţiunile normale sunt:
2
mGZZ 11
RdRs == unde :
1G - este greutatea statică pe cale de rulare orizontală la puntea din faţă
1m - coeficientul de încărcare dinamică a punţii din faţă: care pentru automobilele cu puntea motoare în faţă are valoarea:
1hL
cosLm
g1 <
⋅+=
ϕα

Curs 6 – Puntea fata
17
- pentru automobilele cu tracţiune integrală : ( )
1b
hbcosm g
1 <
⋅−=
ϕα, unde:
L – ampatamentul; a,b – coordonatele longitudinale ale centrului de greutate. Reacţiunile tangenţiale în funcţie de posibilităţile de tracţiune ale
motorului sunt:
λ
λη+
==1
*r
iiMXX
d
t0CVMRdRs
Dacă se face calculul în funcţie de aderenţa roţilor : ϕ*ZXX RSRdRS ==
ϕ - este coeficientul de aderenţă (ϕ = 0,7- 0,8) λ - este coeficientul de blocare al diferenţialului
α - unghiul de înclinare al drumului
dr - raza dinamică a roţilor motoare (pentru calcule rd rr = -unde rr este raza de rulare)
În regimul frânării Reacţiunile normale sunt:
2
mGZZ F11
FdFS == unde:
F1m - este coeficientul de încărcare dinamică la frînarea punţii din faţă: ( )
1b
hgbcosm F1 <
ϕα +=
Reacţiunile tangenţiale date de frînare pîna la limita de aderenţă (6= 0,7…0.8) sunt:
ϕFSFdFS ZXX == În regimul derapării: Asemănător punţilor din spate datorită componentei
: 1yF a forţei laterale, reacţiunile diferă pentru partea stîngă şi dreapta. Stiind că
valoarea maximă a reacţiunilor laterale este limitată de aderenţa roţilor cu calea:
ϕRsRs ZY = şi ϕRdRd ZY = şi ( ) ϕϕ iRdRsRdRsy GZZYYF =+=+=
Rezultă pentru reacţiuni următoarele relaţii:
- pentru roata din stînga :
- reacţiunea normală:
+=B
hg21
2
GZ 1
RSϕ
- reacţiunea laterală:
+=B
hg21
2
GY 1
RSϕϕ
- pentru roata din dreapta
- reacţiunea normală:
−=B
hg241
2
GZ 1
Rd
- reacţiunea laterală:
−=B
hg21
2
GY 1
Rdϕϕ

Curs 6 – Puntea fata
18
În regimul trecerii peste obstcole: În acest regim se consideră că reacţiunile normale cresc de aproximativ două ori faţă de valorile statice:
1GZZ RdRS ==
Calculul grinzii pun ţii din fa ţă
Calculul pentru grinda punţii din faţă se efectuează pentru regimul frînării, regimul derapării şi regimul trecerii peste obstacole.
Deoarece momentul încovoietor în planul vertical ( )lZM FSIV = este mai mare decît în plan orizontal ( )ϕFSFSFSIH ZXlXM == , pentru obţinerea de eforturi unitare egale la cele două solicitări este raţională utilizarea unei grinzi profilate cu secţiune I (sau dublu T)
Pentru secţiunea dublu T figura 14, modulele de rezistenţă la încovoiere şi torsiune sunt:
H6
bhBHW
33
IV−= ;
( ) ( )B6
bBhBhHW
33
IH−+−= ; ( )hB2t
3
3,1W 2
t +=
Figura 14 Pentru materialele utilizate se recomandă eforturile admisibile:
2ai mm/N350300−=σ şi
2at mm/N300=τ
Calculul fuzetei Schema de încărcare cu forţele care acţionează asupra fuzetei este
dată în figura 15.
Figura 15

Curs 6 – Puntea fata
19
Calculul de rezistenţă al fuzetei se face pentru trei regimuri de deplasare ale
automobilului: - regimul frânării - regimul derapării - regimul trecerii peste obstacole
Dacă puntea este şi motoare, reacţiunea tangenţială RdRS XX = este totdeauna mai mică decît reacţiunea tangenţială la frînare FdFS XX = deoarece
Fmm <<11 :
FSFSF1111
RSRS XZ2
mG
2
mGZX ==== ϕϕϕϕ <
Deci, pentru punţile motoare calculul este suficient în cele trei regimuri arătate mai sus.
Faţă de axa fuzetei, reacţiunile roţii cu calea de rulare, în regimurile de deplasare considerate, se reduc la rezultatele ( ) FSRSRSFS X,Y,ZZ şi momentele reactive ''
FysiMM .
Secţiunea periculoasă se consideră a fi secţiunea A-A la distanţa C faţă de planul median al roţii.
În regimul frânării În acest regim fuzeta se calculează la încovoiere FSFSsiZX , momentul
încovoietor fiind dat de relaţia:
2FS
2FS
2FS
'I 1CZZXCM ϕ+=+= , unde FSFSsiZX sunt date de
relaţiile : ϕFSFdFS ZXX ==
2
mGZZ F11
FdFS ==
Efortul unitar efectiv la încovoiere, este:
- I
iI W
M=τ în care 3I D1,0W = pentru fuzetele punţilor nemotoare;
- ( )
D32
dDW
d2
i−= pentru fuzetele punţilor motoare.
D, d - diametrele exterior şi interior ale fuzetei în secţiunea A-A. În regimul derapării Considerînd deraparea spre stînga (vezi fig. 13) cele două fuzete vor fi
solicitate în secţiunea A-A la încovoiere de următoarele momente: - pentru fuzeta din stînga :
dRSRS'YRSIS rYCZMCZM −=−=

Curs 6 – Puntea fata
20
- pentru fuzeta din dreapta : dRdRd
'YRdID rYCZMCZM +=+= unde:
−=
+=B
hg21
2
GZ;
B
hg21
2
GZ 1
RD1
RSϕϕ
−=
+=B
hg21
2
GY;
B
hg21
2
GY 1
RD1
RSϕϕϕϕ
Efortul unitar efectiv la încovoiere este :
( )
I
IDISI W
maxM.M=σ
În regimul trecerii peste obstacole Momentul încovoietor pentru acest regim de calcul este : cZM RSI = , unde RSZ este dat de relaţia 1RS GI = rezultînd un
efort unitar efectiv : I
II W
M=σ
Pentru eforturile unitare efective se recomandă ca limite admisibile valorile:
2I min/N600450−=σ
Calculul pivotului Schema de încărcare a pivotului cu forţele ce acţionează asupra lui este
redată în figura 16.
Figura 16

Curs 6 – Puntea fata
21
Pentru calculul pivotului este necesar să se determine în cele trei regimuri reacţiunile 1R şi 2R ce acţionează în punctele 1 şi 2, de articulare ale fuzetei cu pivotul.
În regimul frân ării
Forţa FDFS ZZ = se reduce faţă de axa pivotului la o rezultantă FSZ , preluată de rulment (sau lagărul cu alunecare), şi la un moment aZFS , echilibrat în punctele 1 şi 2 de reacţiunile :
C
aZFF FS1211 ==
Forţa de frînare FdFS XX = este echilibrată de reacţiunile :
C
tXF FS
21 = ; 2
eXF FS
22 =
Momentul reactiv dFS'F rXM = este echilibrat de ciplul forţelor :
C
rXFF d
fs3231 ==
Forţa de frânare care acţionează asupra fuzetei la braţul a tinde să o rotească în jurul pivotului cu un moment aXM FS= . Acest moment este echilibrat de forţa 4F , din bara de direcţie, dată de relaţia :
l
aXF FS4 =
Ca rezultat al acţiunii forţei 4F , între pivot şi fuzetă apar reacţiunile :
C
nFF 441 =
C
kFF 442 =
Dacă se însumează aceste forţe, ţinînd seama de sensurile lor, se obţin rezultatele :
- pentru lagărul superior 1: ( ) ( )22131
241111 FFFFR −+−=
- pentru lagărul inferior 2: ( ) ( )22232
242122 FFFFR ++−=
Din analiza acestor relaţii se observă că la fuzetele simetrice în raport cu axul lor (e = f), 21 RR < , adică partea de sus este mai puţin solicitată decît cea de jos .
Pentru a se realiza încărcări specifice egale în cele două braţe de articulaţie ale fuzetei, lăţimile 1t şi 2t sunt inegale şi anume 21 tt < . Acest lucru se realizează printr-o alegere adecvată a cotelor e şi f .

Curs 6 – Puntea fata
22
În regimul derapării. Pentru acest regim, forţa verticală RZ este echilibrată în pivot de
următoarele forţe :
C
aZFF R1211 ==
Forţa laterală RY este echilibrată de forţele :
C
eYF,
C
fYF R52R51 ==
Momentul respectiv dR'Y rYM = este echilibrat de forţele :
C
rYFF d
R6261 ==
Observaţii: RSRRSR YY;XX == pentru partea stîngă şi
RdRRdR YY;XX == pentru partea dreaptă . Rezultatele acestor forţe sunt : - pentru lagărul superior: 5161111 FFFR +−= - pentru lagărul inferior: 6252122 FFFR −−= În regimul trecerii peste obstacole. În acest regim, asupra punţii acţionează numai reacţiunea verticală
RdRs ZZ = echilibrată în pivot de cuplul forţelor :
C
aZFRR RS1121 ===
Ca rezultatele 1R şi 2R determinate, pivotul se calculează:
- la încovoiere: 3
)2(1)2(1)2(IL
d1,0
hR
⋅⋅
=σ ;
- la forfecare:
=
2)2(1
)2(Lld
R4τ ;
- la strivire
=
dt
R
)2(1
)2(1)2(Slσ .
Eforturile admisibile la dimensionarea pivoţilor executaţi din oţeluri aliate de cementare sau de îmbunătaţire sunt: la încovoiere 2
ai mm/N600500−=σ ;
la forfecare 2af mm/N50=τ şi la strivire 2
as mm/N30=σ .

Curs 6 – Puntea fata
23
Calculul punţilor din fa ţă articulate Schema de încărcare cu forţele ce acţionează în punţile articulate cu
mecanism patrulater de ghidare şi articulaţii sferice este reprezentată în figura 17.
Figura 17
Calculul se efectuează tot pentru cele trei regimuri de funcţionare : În regimul frânării . În acest regim, în braţele superior 3 şi inferior 4 se transmit de la fuzetă,
prin articulaţiile sferice 1 şi 2 următoarele forţe:
2
0FS21
2
4S1211 l
lXF;
l
lLF2FF =−== , respectiv
2
dFS3231
2
5FS22 l
rZFF;
l
lXF ===
2
6441 l
lFF == , respectiv
2
5442 l
lFF =
Unde 4FSFS F,X,Z sunt calculate anterior. Braţul superior stînga este solicitat la întindere sau compresiune de forţa s51s11s61 FFF −− , iar braţul inferior la încovoiere de momentul forţelor FSZ şi asQ şi la întindere sau compresiune de forţa s12d52s52 FFF −+ .

Curs 6 – Puntea fata
24
Braţul superior din dreapta este solicitat la compresiune sau flambaj de forţa: d62d51d61 FFF +−
În regimul derapării În acest regim, reacţiunile sunt diferite pentru cele două roţi (figura 17.b).
Forţele din braţe sunt date de relaţiile:
2
4)d(Rs)d(s12)d(s11 l
lLZFF
−== ;
2
6)d(Rs)d(s51 l
lYF = , respectiv
2
5)d(Rs)d(s52 l
lYF = ;
2
d)d(Rs)d(s62)d(s61 l
rYFF == ,
unde ZRs, YRs, ZRd, YRd sunt date de relaţiile:
−=
+=B
hg21
2
GZ;
B
hg21
2
GZ 1
RD1
RSϕϕ
−=
+=B
hg21
2
GY;
B
hg21
2
GY 1
RD1
RSϕϕϕϕ
Braţul superior din stânga este solicitat la întindere sau compresiune de forţele F61s-F11s- F51s, iar braţul inferior la încovoiere de momentul dat de forţele ZRs, şi QRs şi la întindere sau compresiune de forţa F52s+F62s+ F12s. Braţul superior din dreapta este solicitat la compresiune sau flambaj de forţa F61d-F51d+ F11d, iar cel inferior la încovoiere de momentul forţelor ZRd, şi QRd şi la întindere de forţa F12d+F52d+ F62d.
În regimul trecerii peste obstacole. În acest regim asupra braţelor punţii acţionează :
2
4RS1211 l
lLZFF
−==
Braţul superior este supus la compresiune sau flambaj de forţa 11F , iar cel inferior la încovoiere de momentele forţelor RSZ şi aQ şi întindere de 12F
Articulaţiile sferice 1 şi 2 se calculează la presiune de contact cu relaţia
22s
)2(1)2(1s mm/N4025
d
R4p −≤=
π, în care :
12R - sunt forţelor ce acţionează în regimurile de mai sus în articulaţiile 1 şi 2; sd - diametrul sferic.
Braţul fuzetei se verifică la încovoiere. Pentru calculul la încovoiere se consideră forţele 1R şi 2R aplicate concentrat în centrul sferei articulaţiei, luându-se momentul acestor forţe în raport cu planul de intrare a bolţului în corpul braţului fuzetei.

1
SISTEMUL DE DIREC ŢIE
1. Rolul şi condiţiile impuse sistemului de direcţie
Sistemul de direcţie asigură maniabilitatea automobilului, adică capacitatea acestuia de a se deplasa în direcţia comandată de către conducător, respectiv de a executa virajele dorite şi de a menţine mersul rectiliniu, atunci când virajele nu sunt necesare. Schimbarea direcţiei (virarea) automobilului se realizează prin poziţionarea roţilor de direcţie. Operaţia de poziţionare, prin rotire, a roţilor în vederea virării automobilului se numeşte bracare. Sistemul de direcţie este unul din mecanismele principale ale automobilului care are un rol hotărâtor asupra siguranţei circulaţiei, mai ales în condiţiile creşterii continue a parcului de automobile şi a vitezei lor de deplasare. Sistemul de direcţie trebuie să satisfacă următoarele condiţii: - stabilizarea mişcării rectilinii (roţile de direcţie după ce virajul s-a efectuat să aibă tendinţa de a reveni în poziţia corespunzătoare mersului în linie dreaptă);
- să asigure manevrarea uşoară a direcţiei (efortul necesar pentru manevrarea direcţiei să fie cât mai redus);
- unghiurile de aşezare a roţilor să se modifice cât mai puţin în timpul virării; - să permită obţinerea unei raze minime de viraj cât mai reduse; - să aibă un randament cât mai ridicat; - să elimine oscilaţiile unghiulare ale roţilor de direcţie în jurul pivoţilor fuzetelor (fenomen cunoscut sub denumirea de shimmy şi care produce uzura articulaţiilor şi pneurilor, precum şi instabilitatea direcţiei); - să fie suficient de ireversibil, astfel încât şocurile provenite din neregularităţile căii să fie transmise cât mai atenuate la volan; - să permită o manevrare rapidă a direcţiei (unghirile de rotaţie ale volanului să fie suficient de mici pentru a realiza o conducere sigură în raport cu viteza automobilului); - să necesite acelaşi număr de rotaţii ale volanului (de la poziţia roţilor de mers în linie dreaptă) pentru aceeaşi rază de viraj la stânga sau la dreapta; - să permită înclinarea roţilor în viraj, astfel încât să nu se producă alunecarea lor; - să asigure compatibilitatea direcţiei cu suspensia (oscilaţiile suspensiei să nu provoace oscilaţiile roţilor de direcţie); - să permită reglarea şi întreţinerea uşoare; - să nu prezinte uzuri excesive care pot duce la jocuri mari şi prin aceasta la micşorarea siguranţei conducerii; - construcţia să fie simplă, să nu producă blocări şi să prezinte o durabilitate cât mai mare.

2
2. Compunerea şi clasificarea sistemelor de direcţie
Elementele componente ale sistemului de direcţie folosit în cazul punţii rigide (roţi cu suspensie dependentă) sunt reprezentate în figura 1. Pentru bracarea roţilor de direcţie, conducătorul va acţiona, prin intermediul volanului 1 şi al arborelui său 2, melcul globoidal 3, care se află în angrenare cu sectorul dinţat 4 (sau cu rola 4′). Pe axul sectorului dinţat rolei (rolei) 5 se găseşte montat levierul de direcţie 5′ articulat cu bara longitudinală de direcţie (de comandă) 6. Prin rotirea volanului într-un sens sau altul se obţine o mişcare de oscilaţie a levierului de direcţie, care va imprima barei longitudinale de direcţie o mişcare axială al cărei sens depinde de sensul de rotaţie al volanului. Bara longitudinală de direcţie fiind articulată de braţul 11 al fuzetei 9 (din partea stângă a automobilului) va imprima acesteia o rotire în jurul pivotului 10. Legătura care există între fuzeta 9 şi fuzeta 13, prin intermediul levierelor 8 şi 14 şi a barei transversale de direcţie 7, va produce şi rotirea fuzetei 13. Patrulaterul format din fuzeta propriu-ziză 12, levierele fuzetelor 8 şi 14 şi bara transversală de direcţie 7 se numeşte trapezul direcţiei.
Figura 1 a - vedere; b - schema cinematică; 1 - volan; 2 - arborele volanului; 3 - melc globoidal; 4 - sector dinţat; 4’ - rolă; 5 - axul levierului de direcţie; 5’ - levier de direcţie (comandă); 6 - bară longitudinală de direcţie; 7 - bară transversală de direcţie; 8 şi 14 - levierele fuzetelor; 9 şi 13 - fuzete; 10 - pivoţi; 11 - braţul fuzetei; 12 - puntea din faţă; 15 şi 16 - roţile de direcţie.
Figura 2 a - vedere; b - schema cinematică;
În cazul automobilelor prevăzute cu suspensie independentă pentru roţile punţii din faţă, bara transversală de direcţie este fracţionată în două sau mai multe părţi. La
a b
a b

3
soluţia din figura 2, bara transversală este compusă din partea centrală 6 (barele de conexiune) şi părţile laterale 8 (barele de comandă). În acest caz, mişcarea de la volanul 2 se transmite, prin intermediul arborelui 3, la mecanismul de acţionare (caseta de direcţie) 4 cu levierul de direcţie (comandă) 5, care antrenează bara de conexiune 6, prin articulaţia din punctul F. Pentru a asigura mişcarea plan paralelă a barei de conexiune, aceasta este articulată în punctul G de levierul condus 7. Barele de comandă 8, articulate în punctele B şi E, respectiv I şi C, transmit mişcarea la levierele fuzetelor 9 pe care sunt montate roţile de direcţie 1 şi 1′. Articulaţiile din punctele B, E, I şi C permit oscilaţia independentă a roţilor de direcţie.
Elementele componente ale sistemului de direcţie se împart în două grupe, în funcţie de destinaţia lor, şi anume:
- mecanismul de acţionare sau comandă a direcţiei, care serveşte la transmiterea mişcării de la volan la levierul de direcţie;
- transmisia direcţiei, cu ajutorul căreia mişcarea este transmisă de la levierul de direcţie la fuzetele roţilor.
Clasificarea sistemelor de direcţie se face după mai multe criterii, şi anume: după locul de dispunere a mecanismului de acţionare; după locul unde sunt plasate roţile de direcţie; după tipul mecanismului de acţionare; în funcţie de particularităţile de transmisiei direcţiei.
După locul de dispunere a mecanismului de acţionare a direcţiei, se deosebesc sisteme de direcţie pe dreapta şi sisteme de direcţie pe stânga.
Volanul de direcţie este montat în partea opusă părţii pe care se circulă în ţara respectivă. Acest mod de dispunere asigură conducătorului o vizibilitate mai bună a automobilelor care vin din faţă. În majoritatea ţărilor, circulaţia se face pe partea dreaptă a drumurilor, iar volanul se monteză în partea stângă.
După locul unde sunt amplasate roţile de direcţie, sistemele de direcţie se împart astfel:
- la automobilele cu două punţi, pot fi directoare roţile punţii din faţă (soluţia clasică), roţile punţii din spate sau roţile ambelor punţi (soluţie aplicată la unele automobile speciale pentru a mări maniabilitatea);
- la automobilele cu trei punţi, pot fi directoare roţile primelor două punţi, roţile primei şi a ultimei punţi sau roţile tuturor punţilor.
În mod normal, roţile din faţă sunt roţi de direcţie din următoarele consideraţii: conducătorul are avantajul unei vizibilităţi mai bune din cauză că roata de direcţie exterioară virajului descrie cercul cu raza cea mai mare şi deci partea din automobil care este cea mai depărtată de centrul de viraj este partea din faţa conducătorului; transmisia la roţile de direcţie din spate este foarte complicată.
După tipul mecanismului de acţionare, sistemele de direcţie se clasifică în funcţie de:
- raportul de transmitere, care poate fi constant sau variabil; - tipul angrenajului, întâlnindu-se mecanisme cu melc, cu şurub, cu manivelă şi
cu roţi dinţate; - tipul comenzii, care poate fi mecanică, cu servomecanism (hidraulic, pneumatic
sau electric) şi hidraulică. După particularităţile transmisiei direcţiei, clasificarea se face în funcţie de: - poziţia trapezului de direcţie în raport cu puntea din faţă, care poate fi anterior
sau posterior;

4
- construcţia trapezului de direcţie, care poate fi cu bara transversală de direcţie dintr-o bucată sau compusă din mai multe părţi.
3. Volanul şi arborele volanului
Volanul reprezintă elementul de comandă al sistemului de direcţie, fiind construit dintr-un butuc, una-trei spiţe şi o coroană.
Coroana volanului are formă circulară şi este construită dintr-o armătură de oţel înglobată într-o masă de ebonită modelată special pentru o uşoară prindere şi antrenare cu mâna.
Diametrul coroanei volanului depinde de tipul automobilului, fiind recomandate valorile: 400 mm la autoturisme mici, 450 mm la autoturisme medii şi mari şi furgonete, 500 - 550 mm la autocamioane şi autobuze.
În tabelul 1 se dau unele recomandări constructive pentru un volan, (figura 3). Tabelul 1
Diametrul volanului, în mm D 380 400 450 500
Distanţa dintre butuc şi coroană, în mm
h 125 125 70 80
Unghiul de înclinare/unghiul între spiţe, în grd.
α/β 20°/140° 30°/160°
Figura 3 Butucul volanului 3 (figura 4) este montat cu caneluri pe arborele 4 şi strâns cu
piuliţa 5. Bucşele 9 şi 10 asigură rotirea arborelui 4, iar limitarea deplasărilor axiale este realizată prin piuliţele 11. Garniturile din cauciuc 12 amortizează vibraţiile ce se pot transmite de la coloana 13. Cavitatea 8 este folosită pentru montajul butonului de comandă al claxonului.

5
Figura 4 În figura 5 sunt date soluţii constructive de asamblare între volan şi coloană.
Arcurile şi tampoanele servesc pentru preluarea şocurilor la ciocniri. Forma constructivă a coloanei depinde de tipul cabinei. Coloana este construită din oţel sau material plastic.
Figura 5 Înclinarea coloanei volanului faţă de verticală se recomandă între 25o şi 70°C. Arborele volanului este format din una, două sau mai multe bucăţi. Soluţia din
două sau mai multe bucăţi se foloseşte atunci când axa mecanismului de acţionare nu se
a
c b

6
află în direcţia arborelui volanului. Arborele articulat amortizează într-o oarecare măsură vibraţiile volanului la circulaţia pe drumuri cu denivelări.
Figura 6 Articulaţiile utilizate în cazul arborelui din mai multe bucăţi, în majoritatea
cazurilor, sunt articulaţii cardanice rigide. În cazul când necesităţile de amplasare a volanului în raport cu mecanismul de acţionare a direcţiei o cer, se pot prevedea două sau mai multe articulaţii cardanice 1 (figura 6.a şi b). Articulaţia 2 (figura 6.c) are o formă specială (asemănătoare celei cardanice) sau poate fi o articulaţie asincronă elastică 3.
În figura 7 sunt reprezentate soluţii constructive de articulaţii asincrone elastice folosite la arborele volanului, iar în tabelul 2 sunt date caracteristicile acestor articulaţii.
Din motive de securitate începe să se răspândească la autoturisme soluţia cu coloana volanului deformabilă, sub acţiunea unui şoc puternic. În general, s-a răspândit soluţia coloanei telescopice, compusă din două tuburi, care devin telescopice la o anumită forţă axială.
3
a b
c
2

7
Tabelul 2
Dimensiuni constructive ale articulaţiilor asincrone elastice folosite la sistemul de direcţie Momentul maxim
admis N.m Unghiul de înclinare,
rad L L1 l D D1 d A B
Varianta Încărcare alternantă
Încărcare de scurtă durată
Constant Temporar mm
Fig 8, a 25 175 0.4 0.9 68 50 9 72 50 10.4 10 14.8 Fig 8, b 25 175 0.4 0.9 94 74 10 98 52 10.4 19 16.4 Fig 8, c 45 180 0.5 0.11 94 74 10 98 70 10.4 19 16.4
Figura 7
c
a
b

8
Figura 8
În figura 8 se reprezintă soluţia cu coloană telescopică care sub acţiunea unei forţe axiale de 1daN se deformează axial. Valoarea forţei axiale de deformare se reglează cu ajutorul piuliţei 1. În acelaşi timp, soluţia permite şi reglarea (deplasarea în direcţie axială cu circa 75 mm şi bascularea cu 6° în plan vertical) a volanului.
Figura 9

9
La soluţia din figura 9, arborele volanului este realizat dintr-un burduf elastic, care, în funcţie de mărimea şocului, se deformează (figura 9, b şi c), amortizând astfel şocul.
Figura 10 Volanul poate fi montat şi articulat de arborele său (figura 10), putându-se astfel înclina sau deplasa în funcţie de direcţia şocului. În cazul şocului axial, volanul se deplasează axial (figura 10, b), iar în cazul şocului lateral , volanul se înclină (figura 10, c), păstrându-se astfel suprafaţa de apăsare şi reducând efectul de lovire asupra conducătorului.
MECANISMELE DE AC ȚIONARE A DIREC ȚIEI
Mai des întâlnite în acţionarea direcţiei la automobile sunt următoarele mecanisme : - mecanismele de acţionare a direcţiei melcate - mecanismele de acţionare a direcţiei cu şurub - mecanismele de acţionare a direcţiei cu manivelă - mecanismele de acţionare a direcţiei cu roţi dinţate
1. Mecanismele de acţionare a direcţiei melcate
Mecanismele de acţionare a direcţiei melcate sunt foarte răspândite la automobile, deoarece, în general, prezintă avantajul unui reglaj simplu al jocului datorat uzurii. Aceste mecanisme se întâlnesc în următoarele variante: melc cilindric - roată melcată; melc globoidal - sector dinţat central; melc cilindric - sector dinţat frontal; melc globoidal - rolă. Mecanismele cu melc cilindric şi roată melcată nu se utlizează la construcţiile actuale de automobile decât în cazuri rare din cauza randamentului scăzut, a greutăţii, a dimensiunilor de gabarit relativ mari, precum şi din cauza unui reglaj complicat al jocului provocat de uzură. La un asemenea mecanism se reglează, de obicei, numai jocul axial al melcului. La unele soluţii, pentru eliminarea efectului uzurii, arborele roţii se montează în bucşe excentrice. Uneori, după un timp de funcţionare, roata melcată are posibilitatea rotirii cu aproximativ 120°, astfel încât să se elimine efectul uzurii.

10
1.1. Mecanismul de acţionare cu melc globoidal şi sector dinţat central
În figura 1 a este reprezentată construcţia mecanismului cu melc globoidal şi
sector dinţat central. Melcul globoidal 2 este fixat prin caneluri pe arborele 7 al volanului şi angrenează cu sectorul dinţat 8. Sectorul dinţat este dintr-o bucată cu axul 12 al levierului de direcţie. Mişcarea se transmite de la volan, prin intermediul arborelui acestuia, la melc, iar melcul, angrenând cu sectorul dinţat, roteşte într-o parte sau alta axul levierului de direcţie.
Figura 1 Jocul axial al melcului, care este montat în caseta de direcţie 1, prin intermediul a
doi rulmenţi cu role conice 4 şi 11, se reglează cu ajutorul piuliţei 6 în poziţia corespunzătoare jocului axial prescris al rulmenţilor.
Reglarea jocului angrenajului melc-sector dinţat se face prin rotirea capacului 13 al casetei şi deci şi a axului 12 şi a sectorului 8 în jurul şurubului 10. Această rotire se face cu ajutorul şurubului excentric 9 şi al bucşei excentrice 15. Rotirea se face până când jocul dintre melc şi sectorul dinţat este cel prescris. Șurubul 14 serveşte la aşezarea sectorului dinţat într-o poziţie simetrică faţă de melc.
Forma globoidală a melcului este folosită pentru mărirea unghiului de rotire a sectorului fără ieşirea acestuia din urmă din angrenarea cu melcul. Tot în acest scop sectorul se construieşte, uneori, cu trei dinţi, ceea ce conduce în acelaşi timp la micşorarea presiunii specifice şi la o uzură mai redusă a angrenajului. În comparaţie cu mecanismul cu melc cilindric-roată melcată, această soluţie are dimensiunile de gabarit mai reduse şi o greutate mai mică. Principalul dezavantaj al acestor mecanisme îl constituie valoarea redusă a randamentului. La aceste mecanisme, randamentul direct ηd, este de aproximativ 0.5, iar cel invers ηi, în jur de 0.4.
Raportul de transmitere al mecanismului de acţionare cu melc globoidal-sector dinţat central este constant şi se determină cu relaţia:
1
2
z
zia = (1)
11
b a
2 1

11
în care: z1 - este numărul de începutiri ale melcului (z1=2...3); z2 - numărul total de dinţi al roţii melcate din care face parte sectorul. Variaţia randamentului direct ηd, şi a raportului de transmitere ia, în funcţie de unghiul de bracare, sunt date în figura 1.b.
1.2 Mecanismul de acţionare cu melc cilindric şi sector dinţat frontal
În figura 2 se reprezintă construcţia mecanismului de acţionare cu melc cilindric şi sector dinţat frontal. La capătul inferior al arborelui volanului 4, se găseşte melcul care angrenează cu sectorul elicoidal 8, cu dantura frontală. Arborele volanului se sprijină în caseta 7, prin intermediul a doi rulmenţi cu role conice 2. Sectorul elicoidal 8 este dintr-o bucată cu axul levierului de direcţie 11, care se găseşte montat în caseta de direcţie prin intermediul rulmenţilor cu role-ace 9. Levierul de direcţie se montează pe partea canelată a axului 11. Prin orificiul 5 se introduce lubrifiantul în caseta de direcţie, iar printr-un orificiu inferior se face golirea. Reglarea jocului dintre melc şi sector se obţine prin deplasarea axului levierului împreună cu sectorul.
Figura 2
Reglarea jocului rulmenţilor 2 se face cu piuliţa 1 şi garniturile 6. Mecanismul de acţionare a direcţiei cu melc cilindric-sector dinţat frontal asigură, la o greutate şi la dimensiuni de gabarit nu prea mari, o presiune specifică redusă în angrenaj, datorită cărui fapt se utilizează pe automobilele de tonaj mare. Dezavantajul principal al mecanismului este valoarea redusă a randamentului.
Raportul de transmitere al mecanismului de acţionare a direcţiei cu melc cilindric şi sector dinţat frontal este constant şi se determină cu relaţia (1).

12
1.3. Mecanismul de acţionare cu melc globoidal şi rolă La acest mecanism, sectorul dinţat este înlocuit cu o rolă, frecarea cu alunecare se
înlocuieşte prin frecarea prin rostogolire, ceea ce conduce la o creştere destul de importantă a randamentului (ηd=0,65, iar ηi=0,50). Melcul globoidal 4 (figura 3) este montat prin presare la capătul arborelui volanului 3 şi se sprijină în casetă prin intermediul a doi rulmenţi cu role conice 9 şi 12. Arborele volanului este divizat în trei părţi, iar articulaţia elastică 1 face legătura între partea inferioară şi partea din mijloc. Etanşarea arborelui volanului la intrarea în casetă este asigurată de inelul de etanşare 13. Rola dublă 6 este montată pe bolţul 5, între braţele furcii 14, prin intermediul a doi rulmenţi cu bile. Furca 14 este dintr-o bucată cu axul 7 al levierului de direcţie 23, fixat cu piuliţa 24. Axul levierului de direcţie este montat în caseta 8, prin intermediul unei bucşe, iar cu un capăt se reazemă în rulmentul cu role cilindrice 19, montat în capacul 20. La intrarea axului în casetă, etanşarea este asigurată cu ajutorul simeringului 15 şi a garniturii de pâslă 22.
Figura 3 Garnitura de reglare 2, de sub capacul casetei 10, servesc la reglarea jocului axial al melcului. Capacul, fixat cu şuruburi, acţionează asupra inelului exterior al rulmentului prin intermediul şaibei 11.

13
În capacul lateral al casetei 8 se găseşte bulonul 18 (protejat de piuliţa 17), care se sprijină pe proeminenţa axului levierului. Reglarea jocului angrenajului dintre melcul globoidal şi rolă, care sunt montate excentric (cu excentritatea e), se face prin bulonul de reglare 18, care deplasează axial rola împreună cu axul 7. Știftul 16 serveşte la fixarea piuliţei 17 după reglare. Lubrifiantul se introduce în caseta de direcţie prin orificiul 21.
Figura 4 La soluţia din figura 4, compensarea uzurii dintre rola 1 şi melcul 4 se face cu
ajutorul adaosurilor de reglaj 2, care se schimbă din dreapta inelului de reazem 3, în stânga lui. În acest fel, excentritatea e şi jocul din angrenaj se micşorează. Pentru îmbunătăţirea contactului rolei cu suprafaţa elicoidală a melcului, axa rolei nu este aşezată perpendicular pe axa axului levierului, ci sub un anumit unghi. Jocul din angrenaj este variabil, deoarece sunt diferite razele generatoarei melcului şi a circumferinţei iniţiale pe care se deplasează rola. În felul acesta, jocul minim se obţine în poziţia medie a mecanismului care corespunde mişcării rectilinii a automobilului. La mecanismele de acţionare a direcţiei cu melc-sector şi melc-rolă, angrenarea fără joc este posibilă numai în poziţia medie a sectorului sau a rolei într-o parte sau alta, faţă de linia de mijloc, jocul se măreşte. Uzura maximă a melcului are loc în partea mijlocie a sa. Pentru mărirea porţiunii de angrenare fără joc, la unele mecanisme de acţionare de tipul melc-rolă, melcul se montează pe arborele volanului cu o anumită excentritate. În funcţie de efortul ce trebuie să fie transmis, rola poate fi simplă, dublă, sau triplă. Cu cât numărul de dinţi ai rolei este mai mare, presiunea de contact va fi mai mică şi ca urmare uzura mai redusă. În scopul reducerii frecării, rola se montează pe axul său prin rulmenţi cu ace sau cu bile.

14
În figura 5 sunt reprexentate diferite variante constructive de role.
Figura 5 Raportul de transmitere al mecanismului de acţionare cu melc globoidal şi rolă se
determină cu relaţia:
ffma r
rii = (2)
în care: ifm este raportul de transmitere dintre freză şi melc, la prelucrarea acestuia; rf - raza cercului de divizare al frezei; r - raza manivelei 3 în care este fixată rola 2 (figura 6,a). Raportul de transmitere ifm este dat de relaţia:
1k
zi
ffm = (3)
unde: zf - este numărul de dinţi ai frezei melc cu care s-a executat melcul; k1 - numărul de începuturi ale melcului 1.
Raportul de transmitere se poate considera practic constant (figura 6,b), deoarece, la rotirea melcului cu ϕv=360°, diferenţa razelor rf -r se modifică cu 0,25 – 0,3 mm.
Figura.6
,f
fma r
rii =

15
Dacă pentru distanţa do (figura 6 c) dintre axele frezei şi manivelei, în poziţia mijlocie, se adoptă jocul nul în angrenaj, la rotirea cu unghiul β apare jocul radial:
rrfddrr f −−+=∆ βcos2 02
02 (4)
Între jocul radial ∆r şi jocul tangenţial ∆t există relaţia de legătură : 02 αrtgt ∆=∆ (5)
unde: α0 este unghiul de angrenare. Jocurile tangenţiale ∆t caracterizează buna funcţionare şi execuţie ale mecanismelor de acţionare cu melc. Soluţia cu melc globoidal-rolă este foarte răspândită datorită uzurilor reduse şi a frecărilor mici, respectiv randamentelor mari (figura 6 b). În figura 7 se reprezintă trei tipuri de mecanisme de acţionare a direcţiei cu melc globoidal, având raportul de transmitere variabil după anumite legi. În figura 7.a se reprezintă un mecanism cu melc globoidal şi rolă simplă, în figura 7.b un mecanism cu melc globoidal şi bolţ rotitor, iar în figura 7.c un mecanism cu melc globoidal şi rolă dublă. La ultima soluţie, la o rotire cu un unghi nu prea mare, într-o parte sau alta a arborelui volanului, un element al rolei iese din angrenarea cu melcul.
Figura 7 Figura 8 În figura 8, a se reprezintă legătura dintre legea de variaţie a raportului de transmitere ia şi variaţia unghiului de înclinare βs al spirei melcului (figura 8.b) în funcţie de unghiul de rotaţie ϕv al volanului. La un raport de transmitere constant (dreapta 1) corespunde o variaţie a unghiului de înclinare a spirei după curba 4; o asemenea lege de variaţie a raportului de transmitere poate fi asigurată de un mecanism cu melc de orice tip. La un raport de transmitere variabil dupa curba 3 (ia se măreşte în poziţiile extreme ale mecanismului), corespunde o variaţie pentru βs după curba 5. O

16
astfel de lege de variaţie a raportului de transmitere este caracteristică pentru mecanismul din figura 7.c. Pentru un raport de transmitere care are valoarea maximă la mersul rectiliniu al automobilului (curba 2) corespunde o variaţie pentru βs după curba 6. Această lege de variaţie a raportului de transmitere se poate obţine cu mecanismele de acţionare a direcţiei cu melc globoidal şi rolă simplă sau melc globoidal şi bolţ rotitor (figura 8.a şi b).
2. Mecanismele de acţionare a direcţiei cu şurub La aceste mecanisme, mişcarea se transmite de la volan la levierul de direcţie prin
intermediul unui şurub pe care se găseşte o piuliţă ce transformă mişcarea de rotaţie în mişcare de translaţie. De la piuliţă mişcarea este transmisă levierului de comandă prin intermediul unei manivele sau altui organ intermediar.
Aceste mecanisme se folosesc la acţionarea la autocamioanele grele, unde se cere un raport de transmitere mare şi un gabarit redus.
Prezintă însă dezavantajul unui randament scăzut din cauza frecărilor mari în cupla şurub - piuliţă ceea ce duce la uzuri rapide, care nu pot fi preluate prin reglare. Mecanismele de acţionare a direcţiei cu şurub pot fi realizate în variantele :
- şurub - piuliţă - manivelă - şurub oscilant - piuliţă - şurub - piuliţă oscilantă
2.1. Mecanismul de acţionare cu şurub – piuli ţă şi manivelă
În figura 9 este reprezentată schema cinematică a unui astfel de mecanism care are în alcătuire următoarele elemente: la partea interioară a axului volanul 1 se găseşte montat şurubul 2 pe care se deplasează piuliţa 3 .
Figura 9

17
Manivela 6 este montată pe axul 4 al levierului de direcţie. La rotirea volnului, piuliţa 3 se deplasează în lungul şurubului 2, iar manivela 6 împreună cu levierul de direcţie 5 se rotesc cu un anumit unghi. La acest tip de mecnism, se reglează numai jocul axial al arborelui volanului.
Şurubul 2 are, de obicei, filet trapezoidal cu mai multe începuturi şi cu unghiul de înclinare al spirei de 8o -11o
Raportul de transmitere al acestui mecanism se determină cu relaţia :
βϕ
d
di va = (6)
în care: vϕ - este unghiul de rotire al volanului; β - unghiul de rotire al arborelui levierului.
La o rotaţie a volanului cu unghiul vϕ piuliţa se va deplasa pe şurub cu mărimea
v
ps ϕ
π2= (p fiind pasul filetului). În acelaşi timp unghiul de rotire al axului levierului va
fi r
stgB = (r fiind distanţa de la axul voanului la arborele levierului). Înlocuind s,
rezultă următoarea expresie pentru unghiul vϕ :
tgBp
rv
πϕ 2= (7)
Raportul de transmitere al mecanismului rezultă prin derivarea relaţiei (7) în funcţie de β:
βπ
βϕ
2cos
2
⋅==
p
r
d
di va (8)
Din această relaţie se observă că raportul de transmitere se măreşte cu deplasarea piuliţei din poziţia mijlocie (figura 9.b).
Raportul minim la mers rectiliniu va fi :
p
ri
π2min = (9)

18
2.2. Mecanismele de acţionare cu şurub oscilant şi piuli ţă
În figura 10 este prezentat mecanismul de acţionare cu şurub oscilant şi piuli ţă şi schema cinematică a acestuia. Pe arborele volanului 4 la partea inferioară, se găseşte o porţiune filetată 6 pe care se află piuliţa 5.
Figura 10 Manivela 7 este montată pe axul 8 al levierului de direcţie 9, care se sprijină de
caseta de direcţie prin intermediul unor bucşe . Şi acestui tip de mecanism are raportul de transmitere variabil, care se
măreşte o dată cu deplasarea piuliţei faţă de poziţia mijlocie. În cazul rotaţiei volanului spre dreapta sau spre stânga, raportul de transmitere nu variază uniform, însă diferenţele care se obţin nu sunt prea mari.
Nici la această variantă nu există posibilitatea reglării jocului în cupla şurub – piuliţă. Se foloseşte la automobilele grele de mare tonaj şi la unele troleibuze.
2.3. Mecanismul de acţionare a direcţiei cu şurub şi piuli ţă oscilantă
Schema cinematică a acestui mecanism este reprezentată în figura 11
Figura 11

19
În timpul rotirii volanului, piuliţa 2 se deplasează în lungul şurubului 1. La rotaţie, manivela 3 descrie un arc de cerc de rază r, cu centrul pe axul levierului de direcţie 4. De asemenea, piuliţa care este legată de manivelă va trebui să descrie, pe lângă mişcarea axială, un cerc de aceeaşi rază. Aceasta este posibil prin oscilarea piuliţei pe şurubul 1.
Raportul de transmitere are aceeaşi variaţie ca la varianta cu şurub oscilant şi se determină cu relaţia:
( )22 cos
sincos
2
lrn
nr
p
ria −⋅+
±⋅=βββπ (10)
în care p este pasul şurubului . Varianta se aplică la autoturismele de mic litraj datorită gabaritului
foarte redus .
Figura 12 Se construiesc şi variante de mecanisme cu şurub – piuliţă oscilantă, la care
frecarea de alunecare este înlocuită cu frecare de rostogolire figura 12, intercalând între flancurile elicei filetului de la şurub şi piuli ţă bilele 3. Circulaţia neîntreruptă a bilelor între şurub şi piuliţă este asigurată cu jutorul a două tuburi de ghidaj montate la capetele piuliţei.

20
3. Mecanismul de acţionare a direcţiei cu manivelă Mecanismele de acţionare a direcţiei cu manivelă pot fi de tipul melc-manivelă cu un bolţ sau melc-manivelă cu două bolţuri. În figura 13 este reprezentat un mecanism melc-manivelă cu un bolţ. Melcul 1 se prelucrează cu o freză deget care se deplasează după aceeaşi taiectorie ca şi bolţul 2. În cazul rotaţiei uniforme a melcului în maşina - unealtă şi la deplasarea cu viteză de avans uniformă a frezei, se obţine un raport de transmitere constant.
Figura 13 La rotaţia uniformă a melcului şi la deplasarea cu viteză de avans variabilă a frezei se obţine un raport de transmitere care depinde de legea de deplasare a frezei. Pentru mărirea randamentului acestor mecanisme, bolţul se poate monta în manivela 3 pe un rulment cu role-ace, înlocuind frecarea de alunecare cu frecare de rostogolire, caz în care randamentul direct poate ajunge la valoarea de peste 0,7.
Figura 14 Schema cinematică a acestui mecanism este reprezentată în figura 14 . Şi la această variantă raportul de transmitere este dat de relaţia:
βπβϕ
cos2
p
r
d
di va == (11)
În general, aceste mecanisme permit atât reglarea jocului axial al melcului cât şi reglarea jocului dintre bolţ şi melc. Acest tip de mecanism se utilizează la autocamioane şi autobuze.

21
4. Mecanisme de acţionare a direcţiei cu roţi dinţate Mecanismele de acţionare a direcţiei cu roţi dinţate pot fi : - cu roţi dinţate cilindrice - cu roţi dinţate conice - cu roţi dinţate şi cremaliere
Primele două variante sunt mai puţin utilizate datorită imposibilităţii obţinerii unor rapoarte de transmitere acceptabile în gabarite acceptabile.
Mai utilizate sunt cele cu pinion – cremalieră deoarece asigură rapoarte de transmitere mari (bracări mari ale roţilor la rotiri mici ale volanului) şi gabarit redus.
Mecanismele cu pinion – cremalieră figura 15 se utilizează destul de frecvent la autoturismele cu suspensie independentă a roţilor şi bară transversală de direcţie.
Figura 15 În felul acesta, numărul articulaţiilor trapezului de direcţie se reduce la patru faţă
de alte soluţii care necesită cel puţin şase articulaţii. Pinionul cu dinţi înclinaţi 8 al arborelui volanului 5 este montat pe doi rulmenţi
radiali axiali 7, al căror joc se reglează cu ajutorul unor garnituri montate sub capacul inferior 11 al casetei de direcţie. Cremaliera 9, este realizată pe o bară cu secţiune circulară, care este fixată în carcasa 6 a casetei. Suportul 3 asigură angrenarea corectă între pinion şi cremalieră. În orificiul din suportul 3 se montează plunjerul de bronz 4 care este apasat pe cremalieră de arcul 10 în scopul compensării jocului din angrenaj. Burduful din cauciuc 1 împiedică pătrunderea murdăriei la angrenaj.
În cazul mecanismelor de acţionare a direcţiei cu pinion cremalieră raportul de transmitere este dat convenţional de raportul dintre diametrul volanului Dv şi diametrul de divizare Dd al pinionului:
d
va D
Di = (12)

22
TRANSMISA DIREC ŢIEI
Transmisia direcţiei are rolul de a orienta (poziţiona) roţile de direcţie pe traiectoria dorită de conducător. Bracarea roţilor de direcţie se face cu ajutorul transmisiei direcţiei care este un mecanism cu pârghii articulate cu patru, şase sau opt elemente. Deoarece axele pivoţilor nu sunt paralele, transmisia direcţiei este în realitate un mecanism articulat spaţial.
Pentru a asigura automobilului aceeaşi lege de virare atât la stânga cât şi la dreapta, se impune ca transmisia direcţiei să fie simetrică faţă de axa longitudinală a automobilului.
Construcţia transmisiei direcţiei este determinată de tipul constructiv al punţii din faţă şi de locul unde sunt plasate roţile de direcţie.
1. Transmisia direcţiei în cazul punţii rigide În cazul automobilelor cu punte rigidă (roţi cu suspensie dependentă),
caracteristic pentru transmisia direcţiei este faptul că bara transversală de direcţie 3 (figura 1) este dintr-o singură bucată. Patrulaterul format din bara transversală 3, levierele fuzetelor 4 şi partea centrală a punţii din faţă 8, poartă denumirea de trapez de direcţie.
În cazul transmisiei cu trapez posterior (bara transversală de direcţie este dispusă în spatele axei punţii din faţă) lb<lp (figura 2. a), iar în cazul soluţiei cu trapez anterior lb>lp, (figura 2. b).
Mecanismul de acţionare a direcţiei 5 poate fi amplasat în spatele (figura 3. a) sau în faţa (figura 3. b) punţii de direcţie.
Figura 1. Transmisia direcţiei în cazul punţii rigide: 1 - levier de direcţie (comandă); 2 - bară longitudinală de direcţie; 3 - bară transversală de direcţie; 4 -
levierele fuzetelor; 5 - fuzete; 6 - braţul fuzetei; 7 - mecanism de acţionare a direcţiei; 8 - partea centrală a punţii faţă.
Figura 2. Soluţii de dispunere a trapezului de direcţie în raport cu puntea din faţă.

23
În funcţie de poziţia postului de conducere faţă de locul de dispunere a mecanismului de acţionare a direcţiei, arborele volanului poate fi dintr-o bucată sau din mai multe (figura 3).
Figura 3. Soluţii de dispunere a mecanismului de acţionare a direcţiei în raport cu puntea faţă
1 şi 3 – levierele fuzetelor; 2 – bara transversală de direcţie; 4 – pivoţi înclinaţi; 5 – mecanism de acţionare a direcţiei; 6 – arborele volantului.
Legătura barei longitudinale (de comandă) cu levierul de direcţie şi braţul fuzetei, precum şi legătura dintre bara transversală şi levierele fuzetelor este realizată prin articulaţii sferice.
O problemă deosebită a sistemului de direcţie este compatibilitatea cu suspensia. Dacă dispunerea mecanismului de acţionare a direcţiei în raport cu suspensia din faţă nu este corespunzătoare, roţile de direcţie vor oscila în ritmul şi cu pulsaţia oscilaţiilor verticale ale arcurilor suspensiei.
La proiectare, trebuie avută în vedere dependenţa dintre sistemul de direcţie, puntea din faţă şi suspensie.
Figura 4. Dependenţa cinematicii roţilor de direcţie de suspensia dependentă, la mersul în linie dreaptă.
La deformarea arcului 1 (figura 4, a), punctul de articulaţie O1, dintre extremitatea anterioară a barei longitudinale de direcţie 2 şi braţu1 fuzetei, este constrâns să efectueze simultan o mişcare pe cercul aa cu centrul în O2 (punctul de articulaţie al arcului cu cadrul 3) şi o mişcare pe cercul bb cu centrul în O3 (punctul de articulaţie al barei longitudinale cu levierul de direcţie 4). Aceste cercuri sunt divergente, iar punctul O1 va trebui să urmeze traiectoria bb, deoarece bara 2 este articulată în punctul O3 (fix pentru o anumită poziţie a volanului), iar braţul fuzetei va fi obligat să se rotească în jurul pivotului, dând naştere la oscilaţia roţilor de direcţie în ritmul şi cu pulsaţia oscilaţiilor cadrului.
Reducerea oscilaţiilor roţilor la această soluţie se realizează prin dispunerea braţului fuzetei şi a barei longitudinale, astfel ca punctele O1, O2, O3 să fie colineare. Neconcordanţa dintre traiectoriile aa şi bb se compensează prin montarea unor arcuri

24
mai puţin rigide la articulaţiile sferice ale transmisiei direcţiei pentru a permite o anumită variaţie a distanţei dintre bolţul levierului de direcţie şi bolţul braţului fuzetei.
În cazul în care capătul din faţă al arcului se fixează printr-un cercel C (figura 4. b), oscilaţiile roţilor de direcţie se reduc, deoarece cercurile aa şi bb sunt tangente interior şi în zona de lucru sunt foarte apropiate.
La soluţiile în care mecanismului de acţionare a direcţiei este deplasat mult în faţă (figura 4, c), cele două cercuri aa şi bb sunt, de asemenea, tangente interior, ceea ce reduce oscilaţia roţilor de direcţie.
Figura 5. Dependenţa cinematicii roţilor de direcţie de suspensia dependentă, la mersul în viraj.
Traiectoriile aa şi bb se apropie mai mult una de alta, în zona de lucru, şi prin mărirea razelor O1O2 şi O1O3.
Trebuie arătat că dacă sistemul de direcţie are erori minime la deplasarea rectilinie a automobilului (figura 5. a), acestea cresc la mersul în viraj, când bara longitudinală de direcţie se deplasează şi traiectoriile aa şi bb se modifică (figura 5. b).
2. Transmisia direcţiei în cazul punţii articulate
În cazul automobilelor cu punte articulată (roţi cu suspensie independentă), mecanismul patrulater devine incompatibil cu deplasarea pe verticală a fiecărei roţi separat. În acest caz, transmisia direcţiei are bara transversală de direcţie secţionată în două sau mai multe părţi (transmisia direcţiei având la bază lanţul cinematic cu şase sau opt elemente).
În figura 6 se reprezintă transmisia direcţiei cu levierul central 3, la care bara transversală de direcţie este formată din două părţi 2 şi 5 (transmisia direcţiei are la bază lanţul cinematic cu şase elemente).
O altă variantă a transmisiei direcţiei cu levier central şi bara transversală formată din două părţi este reprezentată în figura 7.

25
Figura 6. Transmisia direcţiei cu levier central cu bara transversală din două părţi: a - compunere; b - schema cinematică; 1 şi 6 - levierele fuzetelor; 2 şi 5 - părţi ale barei
transversală; 3 - levier central; 4 – bară de comandă; 7 - levier de direcţie. O variantă a transmisiei direcţiei cu levier central o constituie transmisia direcţiei
cu cremalieră (figura 8). În acest caz, levierul central, având o mişcare de rotaţie, a fost înlocuit cu cremaliera 5 cu mişcare de translaţie.
Figura 7. Transmisia direcţiei cu bară transversală din două părţi: a - compunere; b - schema cinematică; 1 — mecanism de acţionare; 2 levier de direcţie; 3 - bară de
comandă (longitudinală); 4 - levier central; 5 şi 6 – părţi ale barei transversale; 7 şi 8 - levierele
fuzetelor. Figura 8. Schema cinematică a transmisiei direcţiei cu cremalieră:
1 – roţi de direcţie; 2 – volan; 3 – arbore volan articulat; 4 – mecanism de acţionare cu pinion şi cremalieră; 5 – cremalieră; 6 – părţi ale barei transversale; 7 – levierele fuzetelor.

26
Figura 9. Transmisia direcţiei cu bara transversală din trei părţi: 1 – mecanism de acţionare; 2 – levier de direcţie; 3 – bară de comandă; 4 – levier conducător; 5 şi 7 – părţile laterale ale barei transversale; 6 - partea centrală a barei transversale; 8 - levierele fuzetelor; 9
— levier condus.
Figura 10. Scheme cinematice ale transmisiei direcţiei cu bara transversală din trei părţi: a - cu mecanism de acţionare posterior; b - cu mecanism de acţionare anterior;
1 - levier conducător; 2 — partea centrală a barei transversale; 3 - levier condus; 4 - mecanism de acţionare; 5 şi 7 - părţilor laterale ale barei transversale; 6 şi 8 - levierele fuzetelor.
La soluţia cu bara transversală formată din trei părţi, se utilizează scheme
cinematice cu opt elemente. În figura 9 se reprezintă o variantă a transmisiei direcţiei cu bara transversală
formată din trei părţi, partea centrala 6 şi părţile laterale şi 7, întâlnită şi sub denumirea de transmisie cu paralelogram central.
Variante ale transmisiei cu bara transversală din trei părţi (cu paralelogram central cu antrenare de la manivele) sunt prezentate în figura 10.
Se întâlnesc şi soluţii de transmisii cu bara transversală din trei părţi cu antrenare de la biela paralelogramului central.

27
3. Transmisia direcţiei automobilelor cu mai multe punţi de direcţie Pentru a mări maniabilitatea, unele automobile cu destinaţie specială au toate
roţile de direcţie. În afară de creşterea capacităţii de manevrare (reducerea razei de virare), la aceste automobile se reduc rezistenţele la înaintare şi puterea consumată la virare (în cazul tracţiunii integrale), deoarece lipseşte circulaţia de puteri.
La aceste automobile, fiecare punte de direcţie are o transmisie a direcţiei. Pentru acţionarea concomitentă, a tuturor punţilor, sunt necesare în plus mecanismele de legătură.
Automobilele cu mai multe punţi de direcţie prezintă dezavantajul înrăutăţirii stabilităţii. În scopul înlăturării acestui neajuns, se utilizează mecanisme de blocare cu ajutorul cărora se fixează roţile posterioare la deplasarea în linie dreaptă.
În figura 11 se reprezintă schema de principiu a sistemului de direcţie al unui automobil cu două punţi de direcţie. De la mecanismul de acţionare 9, mişcarea se transmite prin levierul de direcţie 7, la bara longitudinală 6, care acţionează asupra braţului 5 al axului mecanismului de blocare a roţilor din spate. Prin tijele 3 şi 4, mişcarea este transmisă, de la braţele axului 5, la levierele 2, care oscilează în planul orizontal (în jurul unor axe fixate pe cadrul automobilului) şi produc bracarea roţilor din faţă şi din spate prin intermediul barelor transversale 1 şi al levierelor fuzetelor. Maneta 8 serveşte la blocarea roţilor directoare din spate.
Figura 11. Schema de principiu a sistemului de direcţie al unui automobil cu două punţi de direcţie.
Figura 12. Scheme cinematice ale sistemelor clasice ale automobilelor cu două punţi de direcţie:
a – cu bară transversală (1) nesecţionată; b – cu bară transversală din două părţi (2).
În figura 12 se reprezintă schemele cinematice ale sistemelor clasice ale automobilelor cu două punţi de direcţie.

28
Schema mecanismului de blocare a roţilor directoare din spate este reprezentată în figura 13. Pe axul 1 este fixat braţul 11, prevăzut cu bolţul cu cap sferic 9, ce face legătura cu tija de acţionare a roţilor punţii din spate. Tot pe axul 1 se găseşte montat liber braţul 7, prevăzut cu bolţurile cu cap sferic 8 şi 10, prin care mişcarea este primită de la mecanismul de acţionare şi transmisă roţilor punţii din faţă. Pe canelurile axului 5 culisează manşonul 6 (prevăzut cu danturi frontale), acţionat de furca piuliţei 3, montată pe şurubul 2, comandat de maneta 4.
În cazul în care manşonu1 6 se cuplează cu dantura frontală a butucului braţului 7, ambele braţe (7 şi 11) oscilează simultan, producând bracarea roţilor. Dacă manşonul 6 se cuplează cu dantura frontală a bucşei 5, (solidară cu carterul mecanismului), axul 1 devine fix şi blochează roţile din spate în poziţie neutră, iar direcţia automobilului este asigurată numai prin bracarea roţilor din faţă.
Figura 13. Schema mecanismului de blocare a roţilor directoare din spate
ELEMENTE CONSTRUCTIVE ŞI CALCULUL TRANSMISIEI DIREC ŢIEI
1. Elementele constructive ale transmisiei direcţiei Transmisia direcţiei este construită din bare şi pârghii legate între ele prin articulaţii sferice, care mai au şi rolul de a elimina jocurile datorate uzurii şi de a amortiza şocurile. Articulaţiile sferice se clasifică în funcţie de forma bolţului sferic, cinematica elementelor şi sistemului de reglare a jocului.
Bolţul poate avea capul sub formă sferică (figura 1 a, b, c, e) sau semisferică şi tronconică (figura 1 d).
În funcţie de construcţia elementelor, articulaţiilor pot avea cinematică simplă sau compusă. La articulaţiile cu cinematică simplă, capul sferic al bolţului efectuează, faţă de tija în care este montat, atât o mişcare în jurul axei bolţului cât şi în jurul axelor care trec prin centrul sferei. Toate articulaţiile cu bolţ cu capul sub formă sferică au o cinematică simplă. În cazul articulaţiei cu cinematică compusă, mişcarea se poate descompune în două: una in jurul axei bolţului şi alta în jurul axelor care trec prin centrul sferei şi sunt perpendiculare pe axa bolţului. La mişcarea în jurul axei bolţului, suprafaţa de lucru alunecă pe pastile, în timp ce la mişcările în jurul axelor ce trec prin centrul sferei, pastila alunecă în raport cu capul tijei (figura 1 d).
După sistemul de reglare a jocului, articulaţiile sferice pot fi elastice şi tip pană.

29
În cazul articulaţiilor elastice, jocurile datorate uzurii sun compensate automat cu ajutorul unui arc, care poate acţiona axial (figura 1, b, c, d) sau radial (figura 1, a).
Diametrele sferei articulaţiilor se adoptă astfel: 20…24 mm la automobile uşoare; 27…30 mm la automobile mijlocii; 32…35 mm la automobile grele.
Figura 1
Intensitatea şocurilor ce se transmit mecanismului de acţionare a direcţiei şi volanului depinde de tipul constructiv al acestor articulaţii sferice. Articulaţiile sferice trebuie unse periodic, din care cauză se prevăd cu un gresor. În ultima vreme, pentru simplificarea întreţinerii în exploatare, se folosesc pe scară tot mai largă articulaţiile sferice capsulate. (figura 1, e ) La aceste articulaţii, partea sferică a bolţului şi pastilele au aplicate pe ele un strat din material plastic, de circa 2,5 mm impregnat cu bisulfură de mobilden pentru reducerea frecării. Articulaţia este umplută la montare cu o unsoare pe bază de calciu şi apoi se capsulează.
Figura 2
În figura 2 se reprezintă construcţia barei longitudinale de direcţie. Bara de formă tubulară are capetele îngroşate pentru montarea articulaţiilor sferice care fac legătura cu levierul de direcţie şi respectiv cu braţul fuzetei. Articulaţia sferică este formată din bolţul cu cap sferic 2, montat între pastilele 5. Întregul ansamblu se află sub tensiunea arcului 6, care are rolul de a compensa jocurile produse de uzură şi de a atenua jocurile transmise de roţi la volan. Montajul ansamblului este realizat prin şurubul 4, asigurat de un cui spintecat, iar deplasările bolţului sunt determinate de limitatorul 7. Articulaţia este etanşată cu garnitura 3 (fixată într-o manta de tablă), executată din cauciuc rezistent
e c
b a
d

30
la acţiunea uleiului. Ungerea se face prin gresorul 8. Pe tija conică 9 a bolţului se montează levierul de direcţie sau braţul fuzetei, care este fixat cu piuliţa crenelată 1.
Figura 3 Construcţia barei transversale de direcţie este reprezentată în figura 3. Capul de
bară cu articulaţia sferică este înşurubat în bara tubulară 7 şi asigurat cu colierul de strângere 6. Capul de bară se compune din corpul 9 în care este montat bolţul cu cap sferic 4, între pastilele 5 şi 8 ce se găsesc sub tensiunea arcului 10. Capul 11, asigurat cu inelul elastic 12, serveşte la închiderea ansamblului. Etanşarea este realizată de burduful 14, strâns pe corpul 9 de arcul 13, iar pe tija bolţului fiind fixat în bucşa cu guler 3. Piuliţa crenelată 2, asigurată cu cuiul spintecat 1, serveşte la fixarea articulaţiei de levierul fuzetei. Ungerea ansamblului se realizează prin ungătorul 15.
CALCULUL MECANISMELOR DE AC ŢIONARE A DIREC ŢIEI
Determinarea forţelor care acţionează în sistemul de direcţie în diverse condiţii de deplasare ale automobilului este o problemă dificil ă. Din aceste motive, sistemul de direcţie se calculează în ipoteza că forţa tangenţială maximă Fvmax, care se aplică de către conducător volanului, poate atinge valoarea de 400 N.
Arborele volanului este solicitat la torsiune sub acţiunea forţei Fvmax aplicată la raza Rv: Mt=FvmaxRv=400Rv. (1)
Efortul unitar de torsiune se determină cu relaţia:
.W
RF
W
Mat
t
vmaxv
t
tt τ≤==τ (2)
Ţinând seama că arborele volanului este de formă tubulară, relaţia pentru calculul efortului unitar de torsiune devine:
( ) ,
D16
dD
RFat44
vmaxvt τ≤
−π=τ (3)
unde D şi d sunt diametrele exterior şi interior ale arborelui volanului. Se admite o solicitare τat=40-50 N/mm2. Valorile eforturilor unitare admisibile
sunt date pentru Fvmax=400 N.

31
Mecanismul de acţionare. În figura 1 se reprezintă schema forţelor care acţionează asupra mecanismului de acţionare a direcţiei cu melc globoidal şi rolă. Calculul mecanismului de acţionare se face cu ajutorul metodelor folosite la calculul angrenajelor, în funcţie de particularităţile constructive.
Figura 1 Mecanismul de acţionare cu melc globoidal şi rolă. Elementele sunt supuse la
strivire, iar efortul unitar corespunzător este dat de relaţia:
t
as A
F=σ (4)
unde: At este aria secţiunii totale de contact pentru doi dinţi în angrenare; folosind notaţiile din figura 2 At, se determină cu ajutorul relaţiei:
( ) ( ) .rsinrsinA 2222
2111t ϕ−ϕ+ϕ−ϕ= (5)
Figura 2 Mecanismul de acţionare cu melc globoidal şi sector melcat. Dinţii sectorului
sunt solicitaţi la încovoiere, iar efortul unitar se calculează cu relaţia:
s22
ai
cosbp
hF24
β=σ (6)
unde: Fa este forţa axială din angrenaj; p - pasul spirei melcului; b - lăţimea dintelui; βs - unghiul înclinării spirei melcului; h - înălţimea dintelui.
Forţa Fa se determină cu relaţia:
.p
RF2
tgr
RFF vmaxv
s0
vvmawa
π=β
= (7)

32
Mecanismele de acţionare cu manivelă. La aceste mecanisme, manivela şi bolţul sunt solicitate la încovoiere, iar suprafaţa de contact dintre bolţ şi melc la presiune specifică. La mecanismele cu două bolţuri, calculul se efectuează considerând că forţa este preluată de un singur bolţ.
Figura 3 Bolţul este solicitat la încovoiere de forţa:
.cos
FN a
β= (8)
Presiunea de contact dintre bolţ şi melc se determină cu relaţia:
,1
h
NE418,0p
1c ρ
⋅= (9)
în care: h1 este înălţimea activă a bolţului; p — raza medie a bolţului. În cazul unui oţel de cementare, se admite pca=300-400 N/mm2, corespunzător
efortului de Fvmax=400 N. Mecanismele de acţionare cu şurub-piuliţă (figura 4). La aceste mecanisme, axul
filetat 1 este solicitat la torsiune şi compresiune, filetul piuliţei 2 la strivire şi forfecare, iar manivela 3 la încovoiere.
Figura 4 Axul filetat având diametrul interior d1 se dimensionează la torsiune sub acţiunea
momentului Mv=FvmaxRv, care dă naştere la un efort unitar:
,16/d
Mat3
1
vt τ≤
π=τ (10)
şi la compresiune sub acţiunea forţei Fa:
.4/d
F21
ac π
=σ (11)
Efortul unitar, datorită torsiunii şi compresiunii, este:
.d
M164
d
F44 a
2
21
v
2
21
a2t
2ech σ≤
π+
π=τ+σ=σ (12)
Filetul se verifică la strivire şi forfecare cu relaţiile:

33
( ) ;zdd
F4as
p21
22
as σ≤
−π=σ (13)
,xpzd
Faf
p1
af τ≤
π=τ (14)
în care: d3 este diametrul exterior al filetului; zp — numărul de spire ale piuliţei; p — pasul; x — coeficient de formă al filetului (x≈0,5 pentru filet pătrat şi x≈0,65 pentru filet trapezoidal).
Mecanismul de acţionare cu pinion şi cremalieră. Dantura se calculează la încovoiere sau la presiunea de contact datorită forţei tangenţiale Fs, dată de relaţia:
,D
RF2
D
M2F
d
vmaxv
d
vs == (15)
în care Dd este diametrul de divizare al pinionului. Modulul pinionului se determină cu relaţia:
[ ]cm zc
MK68,0m 3
aimpf
c
σψ= (16)
în care: cf este coeficientul de formă al danturii; zp - numărul de dinţi ai pinionului; Kc — coeficient de corecţie al sarcinii; ψm — coeficient de lăţime al danturii: σai — rezistenţa admisibilă la încovoiere.
Mecanismul de acţionare cu şurub, piuliţă şi sector dinţat (figura 5). Şi în acest caz dantura se calculează la încovoiere sau la presiunea de contact. Forţa tangenţială Ft
este dată de relaţia:
.d
av
d
lt R
iM
R
MF == (17)
Figura 5 Modulul m se determină tot cu relaţia (16), cu specificaţia că zp reprezintă
numărul de dinţi ai roţii din care face parte sectorul dinţat 3. Axul filetat 1 se calculează la torsiune (sub acţiunea momentului Mv) şi la
compresiune (datorită forţei Ft) cu relaţia (12). Filetul piuliţei 2 se verifică la strivire şi forfecare cu relaţiile (13) şi (14). Elementele mecanismului de acţionare a direcţiei se execută din oţel de
cementare sau, uneori, din oţel de cianurare. Astfel, melcul se execută din oţel special crom-nichel, care se cianurează pe o adâncime de 0,3—0,5 mm la duritatea HRC=45 ... 52 sau se cementează pe o adâncime de 0,9—1,3 mm la duritatea HRC=53 ... 64. Roata se execută tot din oţel crom-nichel şi se cementează pe o adâncime de 1,1—1,4 mm, la duritatea HRC=52 ... 62.

1
SISTEMUL DE FRÂNARE
1. Sistemul de frânare al automobilului
Punerea în evidenţă a performanţelor de viteză şi de acceleraţie ale automobilului în condiţii de siguranţă depind într-o măsură hotărâtoare de capacitatea de frânare a acestuia. Cu cât sistemul de frânare este mai eficient cu atât performanţele dinamice pot tinde către valori maxime. Eforturile depuse pentru evoluţia sistemului de frânare în ultimii ani s-au concentrat în special asupra rolului pe care îl are sistemul de frânare în cadrul siguranţei automobilului. Astfel, s-a micşorat spaţiul de frânare prin repartizarea forţelor de frânare proporţional cu sarcina statică şi dinamică pe punţi, s-au îmbunătăţit stabilitatea mişcării şi maniabilitatea automobilului în timpul procesului de frânare prin introducerea dispozitivelor de antiblocare cu comandă electronică, fiabilitatea şi siguranţa în funcţionare au fost sporite datorită creării unor materiale cu calităţi funcţionale superioare, prin mărirea numărului de circuite de acţionare şi proliferării frânelor suplimentare pentru încetinire.
Toate aceste elemente au adâncit deosebirile care există între sistemele de frânare pentru automobilele uşoare (masa totală sub 6.000 kg) şi cele pentru automobilele grele şi autotrenuri. În calculul sistemelor de frânare trebuie să se respecte parametri stabiliţi atât de normele şi standardele naţionale, sau internaţionale cât şi de recomandările tehnice impuse de comunitatea europeană. În scopul obţinerii unui control sigur asupra automobilului sau asupra păstrării poziţiei acestuia în stare de repaus, în toate poziţiile ce apar în timpul exploatării se prevăd pentru acesta două sau mai multe sisteme de frânare în funcţie de necesităţi după cum urmează:
- sistemul de frânare principal, cunoscut sub denumirea de frână de serviciu sau frână de picior, după felul în care este acţionat, are rolul de a reduce viteza automobilului indiferent de viteză, de a-l păstra în starea de repaus, indiferent încărcare şi unghi de pantă în limitele pentru care automobilul a fost construit. Sistemul de frânare principal acţionează asupra tuturor roţilor automobilului.
- sistemul de frânare pentru staţionare, cunoscut sub denumirea de frână de mână, are rolul de a imobiliza automobilul în orice condiţii de exploatare chiar şi sub sarcina maximă în panta maximă, pe timp nelimitat şi în absenţa conducătorului auto. Acest sistem are un mecanism de comandă independent de cel al frânei principale şi trebuie acţionat cu o singură mână, în timp ce automobilul este condus. - sistemul de frânare de siguranţă, cunoscut sub denumirea de frână de avarie trebuie să înlocuiească sistemul de frânare principal la defectarea acestuia. Acesta, trebuie să aibă un mecanism de comandă independent de sistemul de frânare principal care să poată fi acţionat fără a lua ambele mâini de pe volan. Pentru majoritatea souţiilor constructive actuale frâna de mână constituie şi frâna de siguranţă şi poate acţiona pe toate roţile automobilului sau pe roţile uneia din punţi.
- sistemul de frânare suplimentar, cunoscut şi sub denumirea de dispozitiv de încetinire, are rolul de a disipa o parte din energia cinetică a automobilului ce este

2
frânat în scopul evitării supraîncălzirii sistemului de frânare principal. Necesitatea acestui sistem apare la automobilele grele (de capacitate mare) la coborârea pantelor lungi, sau a automobilele de performanţă pentru frânarea în domeniul vitezelor mari.
2. Calităţile pe care trebuie să le îndeplinească sistemele de frânare Sistemul de frânare trebuie să asigure decelerarea maximă a automobilului, permisă de limita de aderenţă la calea de rulare, cu condiţia ca acesta să rămână manevrabil (sistemul de direcţie să realizeze traiectoria comandată). Sistemul principal de frânare trebuie să asigure o deceleraţie maximă de 6...6,5m/s2 pentru autoturisme şi 6m/s2 pentru autocamioane. Deceleraţiile realizate de sistemul de frânare de siguranţă trebuie să fie de 3...3,5m/s2, iar la cel de încetinire, deceleraţiile vor fi de 0,4...2m/s2. Sistemele de frânare moderne asigură o corelare între repartizarea încărcării dinamice pe punţi şi mărimea cuplurilor de frânare realizate de frâne în scopul evitării blocării roţilor ce se descarcă în timpul frânării. Deceleraţiile unghiulare ale tuturor roţilor automobilului sunt, datorită acestor corelări, foarte apropiate în timpului procesului de frânare. Sistemele de frânare cu dispozitve speciale împiedică blocarea roţilor la frânarea pe drumuri cu aderenţă scăzută scurtând în acest fel spaţiul de frânare şi evitând derapările. Pentru a evita rotirile autovehiculului în jurul axei verticale în timpul frânării este necesar ca forţele de frânare de la roţile din stânga şi din dreapta ale aceleiaşi punţi să fie egale, astfel încât cuplul lor în raport cu centrul punţii să fie nul. Pentru a satisface această cerinţă sunt necesare pe de o parte constanţa şi uniformitatea valorii coeficientului de frecare al elementelor de fricţiune de la toate roţile şi pe de altă parte simultaneitatea intrării în funcţiune a frânelor simetrice faţă de axul autovehiculului admiţându-se diferenţe de maximum 0,05...0,1 s.
Frânele cele mai depărtate faţă de mecanismul de comandă trebuie să intre în funcţiune cu o întârziere cât mai mică faţă de momentul acţionării pedalei admiţându-se o întârziere de maximum 0,15...0,35 s în cazul automobilelor independente şi de 0,6 s în cazul autotrenurilor. Funcţie de dependenţa între forţa de acţionare a pedalei şi cuplul de frânare realizat nu trebuie să prezinte creşteri bruşte sau discontinuităţi, calitate cunoscută sub denumirea de progresivitatea sistemului de frânare. Sistemele de frânare trebuie să acţioneze în ambele sensuri de deplasare ale automobilului. Declanşarea procesului de frânare trebuie să se producă numai la comanda conducătorului auto şi să nu fie posibilă acţionarea simultană a pedalei de frână şi a celei de acceleraţie. Funcţionarea sistemelor de frânare trebuie să fie sigură pe toată durata de exploatării în acest scop realizându-se şi sisteme de frânare cu mecanisme de acţionare duble sau triple. Sistemul de frânare trebuie să-şi păstreze calităţile în toate condiţiile de exploatare pentru care a fost proiectat, ca de exemplu umiditate, praf, noroi, îngheţ etc. Sistemul de frânare trebuie să fie confortabil din punct de vedere al efortului de conducere, această calitate fiind dată de necesitatea unor forţe de acţionare reduse, de curse de lucru pentru pedale şi manete relativ mici şi de silenţiozitatea procesului de frânare. Toate acestea trebuie realizate cu ajutorul unor soluţii constructive simple, necesitând lucrări de întreţinere puţine şi cu un cost redus.

3
3. Elementele constructive ale sistemelor de frânare Tipul şi alcătuirea sistemelor de frânare utilizate în construcţia de autovehicule este determinat de tipul şi capacitatea de încărcare a acestora. Astfel, conform normativelor în vigoare (legi şi standarde interne, precum şi standarde şi regulamente internaţionale), sistemele de frânare pot fi: - sisteme de frânare pentru automobile uşoare;
- sistem de frânare pentru automobile grele. 3.1. Sisteme de frânare pentru automobile uşoare. Conform normativelor circulaţiei pe drumurile publice, autoturismele şi
autoutilitarele (având masa totală sub 6000 Kg) trebuie echipate cu două sisteme de frânare independente:
- sistemul de frânare de serviciu, care trebuie să acţioneze pe toate roţile; - sistemul de frânare de staţionare, care trebuie să asigure frânarea sigură a
automobilului staţionat pe panta maximă. Sistemul de frânare de serviciu se realizează, în cazul autovehiculelor uşoare,
după una din schemele din figura 1 sau 2. La puntea din faţă, se utilizează frânele cu saboţi duplex sau servofrâne, iar la puntea din spate frânele cu saboţi simplex (figura 1 a). La autoturisme s-a răspândit, în special schema din figura 1.b, cu frâne simplex pe puntea din spate şi frâne cu disc deschise pe puntea din faţă. Sistemul de acţionare este hidraulic.
Figura 1 În cazul automobilelor mai mari şi la autoturismele din clasa mijlocie şi mare
se mai introduce suplimentar un servomecanism vacuumatic 1, în circuitul de frânare (figura 2) pentru a micşora forţa aplicată la pedală.
b
3
3 2
1
2
4
4
6 5 1 a
6 5

4
În cazul defectării servomecanismului vacumatric, sistemul de frânare lucrează ca un sistem de frânare simplu .
Schemele din figura 2,b şi c, se utilizează în prezent, mai mult datorită compactităţii construcţiei şi a numărului redus de racordări. În toate cazurile frânele punţii din faţa, respectiv spate se acţionează pe circuite separate .
Figura 2
3.2. Sisteme de frânare pentru automobile grele şi autotrenuri
Pentru autovehiculele grele se utilizează următoarele tipuri de sisteme de frânare de serviciu :
- sisteme de frânare având frâne cu saboţi cu acţionare pneumatică; - sisteme de frânare având frâne cu saboţi cu acţionare pneumo-hidraulică; - sisteme de frânare având servofrâne cu disc cu acţionare pneumo-
hidraulică. Schema de acţionare generalizată dă posibilitatea de a frâna şi o remorcă . Frâna de staţionare acţionează, de regulă, tot asupra frânelor de la roţi, dar prin
intermediul unui acumulator cu arc. La autobuze, autotrenuri şi autocamioane se impune un al treilea sistemului de
frânare – frâna suplimentară – care să degreveze sistemul de frânare şi să preia frânările de durată la coborârea plantelor lungi .
3.2.1. Sistemul de frânare cu acţionare pneumatică
În figura 3 se reprezintă schema de principiu a sistemului de frânare pneumatic
cu un circuit şi o conductă (pentru frâna de la remorcă).
d
1 1
1 1
c
b a

5
Sistemul se compune din compresorul 1 care refulează aerul aspirat prin filtrul 2 în conducta 3, separatorul de ulei 4, robinetul de umflare a pneurilor 5, regulatorul de presiune 6, în rezervorul de aer 7.
Figura 3
5
4
3
2 1
9
7
13
6 B A
11
12
10 8
C
14 15 19
14
7
9
13
A
C
15
B
11
12
17
22
20
18
19
21
16
19
16
18
22
18
19
21
17
b a
Spr
e co
mpr
esor
20

6
Existenţa aerului din rezervoare este semnalizată de manometrul 13. În cazul când în rezervorul 7 aerul a ajuns la presiunea nominală, supapa de transfer (trecere) 10 permite umplerea şi a celui de-al doilea rezervor 9.
Totodată, aerul comprimat trece prin camera C a robinetului central de comandă, în conducta 15, cuplajul de legătură 16 la conducta 17 a remorcii unde umple rezervorul 20 al remorcii. La apăsarea pedalei 12 (figura 3,b) se face legătura dintre camera B a robinetului central de comandă şi conducta 15, astfel încât conducta remorcii se goleşte. Ca urmare, robinetul invers 21 face legătura între camerele de frână 22 ale remorcii şi rezervorul 20, producând frânarea. Totodată, se închide în partea de jos a robinetului 11 legătura dintre camera A şi camerele de frânare 14 ale autocamionului, astfel încât aerul comprimat va acţiona frânele. Dezavantajul acestui sistem constă în faptul că, în timpul frânării, rezervorul de aer al remorcii nu mai este alimentat cu aer comprimat. Ca urmare a apărut sistemul de frânare pneumatic cu două conducte: una de alimentare şi alta de comandă. Deoarece remorcile trebuie să fie interschimbabile cu autotractorul, iar remorcile sunt construite fie în sistemul cu o conductă fie cu 2 conducte s-a realizat sistemul de frânare cu 2+1 conducte.
Subansamblurile transmisiilor pneumatice pentru sistemulele de frânare se construiesc într-o mare varietate de soluţii constructive. Datorită multiplelor probleme care se pun la proiectarea unei astfel de instalaţii, nu s-a obţinut încă o soluţie standard ca în cazul transmisiilor hidraulice. O problemă deosebită o pune robinetul central de comandă care trebuie să asigure o proporţionalitate între forţa pedalei şi forţa de frânare la roţi. Totodată, ţinând seama de lungimea mare a conductei de la robinetul de comandă la frânele remorcii, comanda acestora trebuie astfel realizată încât autotractorul să frâneze simultan cu remorca, deoarece, în caz contrar apar tendinţe spre instabilitatea mişcării autotrenul se poate frânge.
Sursa de energie necesară realizării forţelor de frânare fiind independentă de conducătorul auto, procesului de reglare a forţei de frânare în funcţie de spaţiul de oprire disponibil îi revine un rol important. Conducătorul autovehiculului reglează deceleraţia cu ajutorul robinetului central din sistemul de frânare.
Pentru reglarea presiunii aerul din sistemulele de frânare de serviciu s-a introdus o reglare combinată funcţie de spaţiu şi forţă. De regulă, frânarea începe cu o reglare funcţie de spaţiu dacă se acţionează asupra robinetului prin intermediul unui arc de compensare a spaţiului. Actiunea presiunii reglate pe aria suprafeţei pistonului de reacţie apare ca o reacţie inversă, echilibrând forţa activă de reglare. La corectarea reglării, procesul se dezvoltă într-un sens sau altul prin faptul că unei modificări a spaţiului de reglare îi urmează o modificare a forţei de reacţie. 3.2.2. Sistemul de frânare pneumo-hidraulic Transmisiile pneumo-hidraulice (hidropneumatice) se utilizează la autocamioanele şi autobuzele de capacitate mijlocie care lucrează cu remorci având sistemul de frânare pneumatic. În figura 4 se reprezintă schema principială a unui sistemul de frânare pneumo-hidraulic. Partea pneumatică se compune din compresorul 1, separatorul de ulei 2, regulatorul de presiune 3 şi rezervorul 4.

7
Acţionarea frânei se face prin pompa centrală cu servomecanism pneumatic 8. La acţionarea pedalei de frână, servomecanismul pneumatic acţionează pompa centrală, care, la rândul ei, acţionează asupra cilindrilor receptori de la frânele 9 ale autocamionului tractor şi asupra robinetului de comandă 5 al remorcii.
Ca urmare, se închide alimentarea cu aer spre remorcă şi se goleşte conducta 7, realizându-se frânarea remorcii.
Figura 4 Sistemul de frânare pneumo-hidraulic prezintă avantajul că are un timp de intrare în funcţiune mai mic decât sistemul de frânare pneumatic şi un consum de aer redus. Nu se pretează bine la autovehiculele grele, datorită etanşărilor dificile pe suprafeţe mai mari.
3.3.1. Sistemule de frânare cu mai multe circuite şi conducte
În figura 5 se reprezintă câteva din variantele actuale ale sistemulelor de frânare pneumatice pentru autotrenuri, autocamioane şi autobuze. În figura 5,a se reprezintă sistemul de frânare cu două conducte pentru remorcă. Blocul energetic este format din compresorul 1, regulatorul de presiune cu filtru 2, aparatul antigel 3, rezervorul de aer comprimat 4. Robinetul central distribuitor 5 comandă frânarea automobilului-tractor şi remorcă. Remorca este legată de autotractor prin două conducte: conducta 13, care alimentează rezervorul remorcii prin robinetul de siguranţă 20, dacă presiunea din sistemul autotractorului depăşeşte 0,45 N/mm2, conducta 14, care comandă sistemul de frânare al remorcii. În acest scop, robinetul central distribuitor 5 comandă robinetul-releu 9, care transmite aerul comprimat din conducta 13 la robinetul releu de frânare de pe remorcă. Frâna de staţionare se comandă cu robinetul 7 prin acţionarea normală şi robinetul cu două căi 21. Pentru a nu fi confundate, semicuplele 17, şi 18 diferă constructiv sau sunt vopsite în culori diferite. În figura 5,b se reprezintă un sistemul de frânare pneumatic cu două circuite (separat pentru frânele din faţă şi spate) şi două conducte. Cele două circuite se alimentează separat de la două rezervoare 4/1 şi, respectiv, 4/2, alimentate de la compresor prin supapa uniservo cu două căi 10. Robinetul distribuitor 5 constă în fapt din 2 robinete simple, jumelate, ce pot fi acţionate simultan pe pedala de frânare. Spre
3 4
5
6
B
V
2 1
9
9
V
A A 7
9
9

8
deosebire de schema anterioară, frâna de staţionare se comandă cu manetă direct de la robinetul 8. În figura 5, c se prezintă cazul unui sistemul de frânare pneumatic cu 3 conducte spre remorcă, şi anume:
- conductele 13 şi 14 au acelaşi rol ca şi în cazul precedent, adică alimentarea rezervorului de pe remorcă (13) şi comanda frânei de serviciu la remorcă (14); - conducta suplimentară 12 serveşte pentru comanda frânei de staţionare, care comandă, totodată, şi acumulatoarele de forţă cu arc din camerele de frânare-spate ale autotractorului.
Figura 5
7
20 13
11
17 15
5
4 3 2 1
2 1
a
21
11
9 14 15 18
20 13 15 4/2
4/1 3
6 18
17
14 5
11
10
2 b
19 8
4 4
7
1
11
4 5 14 15
19
c
12
13
11 11

9
Mai există încă un sistemul de frânare cu 3 legături între autotractor şi remorcă, care are rolul de a permite cuplarea la autotractor atât a remorcilor standard cu o singură conductă cât şi a remorcilor cu două conducte. Ca urmare, aceste sisteme de frânare se numesc cu 2+1 conducte şi nu trebuie confundate cu sistemul de frânare din figura 5,c.
3. Frâne pentru automobile Clasificarea cea mai comodă a frânelor rezultă pe baza elementelor active.
Astfel, există frânele cu saboţi care acţionează asupra unui tambur din interior şi frâne cu bacuri care acţionează asupra unui disc fixat de butucul roţii. Frânele cu disc pot fi: deschise sau închise. La construcţii de automobile mai vechi, se mai întâlneşte frâna cu bandă, utilizată ca frână de staţionare.
3.1. Construcţia frânelor cu saboţi şi tambur. Tipurile uzuale de frâne de automobil cu tambur şi saboţi interiori şi
principalele lor particularităţi sunt prezentate în tabelul 1.

10
Tabelul 1
Construcţia frânei simplex
Frâna simplex are în compunerea sa un sabot primar şi unul secundar pe ambele sensuri de rotire ale tamburului, corespunzătoare mersului înainte sau înapoi al automobilului, putând fi articulaţi sau flotanţi. În funcţie de modul de acţionare al saboţilor se deosebesc:
- frâne cu deplasare egală a saboţilor şi forţe de acţionare diferite; - frâne cu deplasare diferită a saboţilor şi forţe de acţionare egale.
Frâna simplex cu acţionare egală a saboţilor are o uzură egală a garniturilor de frecare. Deplasările egale ale saboţilor se realizează cu dispozitive mecanice cu camă simplă sau cu pene transversale acţionate de un cilindru receptor pneumatic.

11
Frâna simplex cu acţionarea saboţilor cu forţe egale prezintă o uzură mai mare a garniturii de frecare a sabotului primar. Acţionarea acestei frâne se face cu un cilindru receptor hidraulic şi, mai rar cu dispozitive mecanice. În figura 6 este prezentată construcţia frânei simplex la care saboţii 13 şi 14 sunt articulaţi la capătul de jos în bolţurile 4, fixate pe talerul 6 şi strânse cu piuliţele 7. Tot de taler este fixat şi cilindrul receptor 17 prevăzut cu arcul. Garnitura de frecare a sabotului 13 (primar) are o lungime mai mare decât a sabotului 14 (secundar) pentru a obţine o uzură uniformă.
Figura 6 Jocul la partea superioară a saboţilor se reglează cu excentricele 3, prevăzute
cu bolţurile 8, pe care se află arcurile 9, pentru fixarea excentricelor, în diferite poziţii. Arcul 16 menţine saboţii sprijiniţi pe excentricele 3. La partea inferioară, saboţii sunt prevăzuţi cu bucşele excentrice 5, montate pe bolţurile 4 servind la reglarea jocului dintre saboţi şi tambur la partea inferioară. Fiecare sabot este asigurat contra deplasărilor laterale cu ajutorul arcului 11 strâns cu şaiba 12 de prezonul 10, fixat de taler. Mecanismul de acţionare pentru frâna de staţionare şi avarie (frâna de mână) este compus din levierul (pârghia) 2, articulat în punctul 19, rezemat de tija 1 şi cablul de acţionare 15.
Construcţia unei frâne simplex cu saboţi flotanţi este prezentată în figura 7.

12
Figura 7
Construcţia frânelor duplex
În cazul în care saboţii sunt primari pe un sens de rotaţie a tamburului şi secundari pentru rotirea în sens invers, frâna este de tipul uni-duplex. În cazul în care saboţii sunt primari pentru ambele sensuri de rotaţie a tamburului frâna este de tipul duo-duplex.
În figura 8 se prezintă frâna uni-duplex cu saboţii articulaţi .
Figura 8

13
Poziţia sabotului 2 pe taler este asigurată, în afară de articulaţia de pe bolţul 10, cu ajutorul tamponului 11, bolţului 6, saibelor 3 şi 5 şi arcului 4. Reglarea jocului între saboţi şi tambur se face la ambele capete ale saboţilor. La capătul dinspre cilindru reglarea jocului se face prin excentricele (camele) 16, iar la capătul articulat prin bucşa excentrică 13, care se roteşte împreună cu bolţul. Construcţia frânei duo-duplex cu saboţi flotanţi este prezentată în figura 9.
Figura 9 La frânare, pistoanele din cilindrii receptori 6, cu acţiune în ambele sensuri,
apropie saboţii 3, 7 de tambur, iar aceştia, sub acţiunea forţelor de frecare se deplasează pe direcţia de rotaţie. Fiecare sabot are două reazeme fixe prin tijele 14, 15 pe care se sprijină în funcţie de sensul de rotire al tamburului. Dacă sensul de rotaţie este cel indicat pe figură, atunci sabotul 3, sub acţiunea pistonului cilindrului receptor 6 şi a forţei de frecare se va sprijini pe opritorul 13. În acelaşi timp, sabotul 7, sub acţiunea pistonului cilindrului 10 şi a fortei de frecare, se va sprijini pe opritorul 2. La rotaţia în sens invers, sabotul 3 se va sprijini în opritorul 2, prin intermediul braţului 15, iar sabotul 7 în opritorul 13, prin intermediul braţului 14. Reglarea jocului dintre saboţii 3, 7 şi tamburul de frână se realizează prin piesele 5, respectiv 9.
Construcţia frânei servo
Frâna servo, sau frâna cu autoamplificare are ambii saboţi primari pe un sens de rotaţie al tamburului şi ambii secundari la rotirea în sens invers - frâna uni-servo - sau ambii saboţi primari pe ambele sensuri de rotire ale tamburului - frâna duo-servo.
Caracteristic acestor tipuri de frâne este faptul că sabotul posterior este activat de către sabotul anterior. Datorită forţelor de frecare forţa de acţionare a sabotului

14
posterior este mai mare în comparaţie cu forţa de acţionare a sabotului anterior. În modul acesta momentul de frânare se măreşte substanţial, se autoamplifică.
Frâna servo se foloseşte la automobilele la care cu o forţă nu prea mare la pedală se obţin forţe de frânare mai mari, fără folosirea unor servomecanisme auxiliare.
În figura 10 este prezentată construcția frânei uni-servo.
Figura 10 Cilindrul receptor cu acţiune unisens acţionează asupra sabotului 3, în sensul
apropierii acestuia de tamburul 1. Sabotul tinde să fie antrenat la rotaţie în sensul indicat rezemându-se, prin intermediul şurubului de sprijin şi reglaj 8, pe sabotul 4 care va fi apăsat pe tamburul 1 şi antrenat la rotaţie până se va sprijini în bolţul cilindric 2 de reazem. În acest moment se dezvoltă momentul de frânare, sabotul fiind apăsat mai puternic pe tambur decât sabotul 4, datorită acţiunii suplimentare a fortelor de frânare dintre tambur şi sabotul 3, (fenomenul de autoamplificare a forţei de apăsare a sabotului pe tambur). Reglarea jocului între saboţi şi tambur se realizează cu ajutorul şurubului de reglaj 8. Arcurile de readucere au rolul să menţină saboţii 3,4 rezemaţi pe bolţul cilindric, în cazul când frâna nu este acţionată. Arcul 7 menţine tot timpul în contact nervurile saboţilor 3,4 cu şurubul de reglaj 8.
Un indice general de apreciere a frânelor este de eficitate Cp, respectiv Cs al sabotului şi care reprezintă raportul din forţă periferică U şi forţa de acţionare S. Acest coeficient depinde de modul de amplasare şi acţionare ale sabotului frânei.
Coeficientul de eficacitate creşte, dacă forţa periferică tinde să apese sabotul suplimentar pe tambur (sabot primar) şi scade dacă forţa de frânare tinde să îndepărteze sabotul de pe tambur (sabot secundar). Pe baza coeficientului de eficacitate a saboţilor se obţine raportul de transmitere interior C al frânei. Cu notaţiile din tabelul 1, rezultă pentru:

15
- frâna simplex: :8,1...4,1``
``
`
` =+=+=S
U
S
UCCC SP
- frână duplex: 5,2...9,12
2 ===S
UCC P
- frână servo: 5,4...5,31 =
+=S
RCC P
unde R este reacţiunea dintre cei doi saboţi. Elementele de acţionare ale saboţilor sunt cilindrii hidraulici care acţionează direct asupra saboţilor (figura 11) sau servocamerele pneumatice care acţionează prin intermediul unor came asupra saboţilor (figura 12). În figura 11 s-a reprezentat şi mecanismului de reglare automată a jocului dintre sabot şi tambur, frâna fiind în stare liberă. Pe tija 2 sunt fixate prin fricţiune elementele elastice 3. Inelele 4 sunt fixate în pistoanele 1 cu siguranţele 5. La acţionarea frânei, pistoanele 1 se deplasează împreună cu elementele elastice 3 (după ce a fost anulat jocul s) până când sabotul intră în contact cu tamburul. După eliberarea frânei, arcurile de retragere ale saboţilor reduc saboţii numai pe distanţa s, întrucât forţa arcurilor de retragere este mai mică decât forţa de frecare a elementelor 3 pe tija 2. În figura 12 se reprezintă mecanismul de acţionare cu camă al saboţilor. Servomecanismul pneumatic acţionează prin tija 5, asupra pârghiei 6 şi arborelui 7, rotind cama 4, astfel încât saboţii să fie apăsaţi pe tamburi, realizând frânarea.
Figura 11 Figura 12.
Figura 13
1
1
2
3
4
7
6
5
1
3 4 5 3 2
4 3 2 1

16
Reglarea jocului dintre tambur şi sabot se efectuează cu mecanismul format din şurubul 2 şi melcul 3, astfel încât să se schimbe unghiul dintre pârghia 6 şi cama 4. În figura 13 se reprezintă un tip de servomecanism pneumatic 2 care acţionează asupra camei şi realizează frânarea cu ajutorul unui arc, iar slăbirea cu pistonul 1, asupra căreia acţionează aerul comprimat. Mecanismul de acţionare pneumatică se utilizează pe autovehicule şi remorci grele. Construcţia frânelor cu disc Răspândirea largă a frânelor cu discuri în construcţia automobilelor este relativ recentă. Această întârziere se datorează valorii mici pe care o are caracteristica C în raport cu a frânelor cu saboţi. Odată cu utilizarea servomecanismelor în sistemele de acţionare ale frânelor, acest dejavantaj a pierdut din importanţă, întrucât frânele cu disc se bucură şi de avantajele nete în ceea ce priveşte sensibilitatea la variaţia coeficientului de frecare, greutatea fiind mică, iar întreţinerea uşoară. Frânele cu disc pot fi de tip închis sau deschis. Frâne cu disc deschise
În figura 14. se reprezintă o frână cu disc de tip deschis. De butucul 1 al roţii este fixat discul 7, care se roteşte odată cu roata.
Figura 14 Discul este cuprins de etrierul 2 ca un cleşte. Etrierul are în componenţă
pistoanele 4 care sunt ghidate fie în corpul etierului fie, ca în cazul de faţă, de tijele 5. Etrierul posedă două pistoane, câte unul de fiecare parte. Trimiţând lichid sub presiune asupra pistoanelor, ele apasă bacurile pe discul 7, în felul acesta frânându-l. În cazul frânelor cu disc deschis, având discul montat pe butucul roţii de-a lungul
1
3 4 5
6
7
2 A
A
A - A

17
circuferinţei interioare există posibilitatea deformării acestuia sub acţiunea fluxurilor termice create la frânare. În cazul montării discului pe circumferinţa exterioară (figura 14), acest pericol este micşorat. Totodată, butucul roţii, având forma unui ventilator, creează un curent de aer puternic, care favorizează răcirea rapidă a discului. Faptul că raza medie activă se măreşte constituie, de asemenea, un avantaj important. La alte construcţii de frâne, consecinţele supraîncălzirilor sunt evitate prin configuraţia mai complexă a discului (palete radiale între două discuri). Pentru a evita murdărirea suprafeţei de frecare a discului, garniturilor de fricţiune rămân în contact permanent cu discul. În acest scop se utilizează dispozitivele de reglaj automat, care asigură, însă, un joc mai mic între bac şi pistonul de acţionare decât la frânele cu saboţi. Unul dintre dezavantajele frânei cu disc deschise fiind expunerea discului la praf sau murdărie, acesta se montează uneori pe arborele planetar cât mai departe de roată.
Frânele cu disc închise
Frânele cu disc închise se bucură de avantajele frânelor pe saboţi, în ceea ce priveşte capacitatea construcţiei şi posibilitatea obţinerii unor rapoarte de transmitere interioare mai mari (pentru frâna de disc închisă) C = 4,5 faţă de 0,5 …0,65 cât este la frâna deschisă). Frâna de acest tip se montează în special pe autocamioane şi autobuze. Ele pot lucra cu sau fără amplificare.
În figura 15 se reprezintă o frână cu disc închis cu servoefect.
Figura 15 De butucul roţii se fixează carcasa 1. În interiorul carcasei, ghidate de scutul
frânei 6, se află discurile de fricţiune 2, respectiv 5, precum şi dispozitivul de acţionare 4. Între discurile de fricţiune, în locaşuri speciale, se aşează bilele 3. Funcţionarea frânei rezultă din figura 15.b,c. Carcasa 1, rotindu-se cu viteza unghiulară ω , este frânată dacă se trimite lichid sub presiune în dispozitivul 4. Sub
4
3 2 1
1
6
5
5
4 3 2
ω 7 6
2
5
2
5
a
3
3
c
b

18
acţiunea dispozitivului de acţionare, discurile se depărtează, datorită bilelor 3 şi a configuraţiei locaşurilor în care sunt aşezate. Discurile sunt montate pe ghidajele lor cu joc tangenţial, astfel încât, la crearea unui moment de fricţiune, discul 2, respectiv 5, este antrenat de carcasa 1, până discul 2 ajunge la reazem. Discul 5 este antrenat în continuare de carcasă, obţinându-se o apăsare suplimentară a discurilor prin efectul de pană pe care îl produc bilele 3 în locaşul lor şi deci, un moment de frecare mărit. Capacul filetat 7 serveşte atât ca protecţie împotriva prafului cât şi la compensarea uzurii garniturilor de fricţiune. Frânele cu disc de tip închis se bucură de o lungă durată de funcţionare, întrucât suprafeţele de fricţiune sunt foarte mari, iar lucrul mecanic de frecare specific este foarte mic. Totodată, regimul termic al acestui tip de frână este mult mai bun decât la o frână cu saboţi echivalentă din punctul de vedere al performanţelor.
CALCULUL SISTEMULUI DE FRÂNARE
Calculul sistemului de frânare cuprinde: - dimensionarea de ansamblu a frânelor; - verificarea frânelor la solicitări mecanice;
- verificarea frânelor la solicitări termice;
1. Dimensionarea de ansamblu a frânelor Cuprinde:
- stabilirea momentelor de frânare la punţile automobilului; - alegerea tipului de frână utilizat;
- alegerea tipului mecanismului de acţionare.
1.1. Stabilirea momentelor de frânare la punţile automobilului Stabilirea momentelor de frânare la punţile automobilului se face prin două
metode: - stabilirea momentelor de frânare la punţi din condiţia ca momentul de frânare
să nu depăşească valoarea admisă de aderenţă; - stabilirea momentelor de frânare la punţi din condiţia ca automobilul să
realizeze la frânare o decceleraţie maximă afmax impusă. În figura 16 sunt reprezentate forţele care apar la punţi, la frânarea
automobililului pe orizontală, cu neglijarea rezistenţei aerului şi rezistenţei de rulare.
Figura 16
L
Cg
b a
hg
Cg
Ga Z1 Z2
Ff1 Ff2
Ff
2 1

19
Reacţiunile dinamice Z1 şi Z2 sunt obţinute din ecuaţiile de momente în raport cu punctele 1 şi 2, de unde rezultă ecuaţiile:
L
hFbGZ
gfa +=1
L
hFaGZ gfa −
=2 (1)
Ținând seama de condiţia că frânarea are loc la limita de aderenţă, putem folosi relaţia: af GF ⋅ϕ=
Rezultă:
L
hbGZ g
a
⋅ϕ+=1 ,
L
haGZ
ga
⋅−=
ϕ2 . (2)
Din condiţia de echilibru a forţelor pe orizontală şi verticală, obţinem: 21 fff FFF += , 21 ZZGa += (3)
În condiţiile păstrării aderenţei impuse, 11 ZF f ⋅ϕ= şi 22 ZF f ⋅= ϕ , iar momentul
necesar la punţile automobilului se calculează cu relaţiile:
ϕ⋅ϕ+
⋅=⋅⋅ϕ=⋅=L
hbrGrZrFM g
rarrff 11 1
ϕ⋅ϕ−
⋅=⋅⋅ϕ=⋅=L
harGrZrFM g
rarrff 22 2 (4)
Pentru calcul se recomandă o valoare a coeficientului de aderenţă ϕ = 0,4...0,5 (limita superioară pentru autoturisme).
Înălţimea hg a centrului de greutate la diferite categorii de automobile variază între următoarele limite:
- autoturisme neîncărcate 0,55...0,80 m; - autoturisme încărcate 0,50...0,75 m; - autocamioane neîncărcate 0,90...1,10 m; - autocamioane încărcate 0,70...0,90 m;
Raportul dintre momentul de frânare, respectiv forţele de frânare, la care are loc frânarea ideală se calculează cu relaţia:
κϕακϕαλ
⋅−⋅+===
2
1
2
1
2
1
F
F
M
M
f
f (5)
În care s-au notat: ;L
b1 =α ;
L
a2 =α
L
hg=κ .
Deoarece raportul λ depinde de un parametru variabil (coeficientul de aderenţă ϕ) se va alege pentru acest parametru o valoare de compromis şi anume: - pentru autoturisme λ=1,3...1,6; - pentru autocamioane λ=0,5....1,0, care asigură o repartizare suficient de bună a momentelor de frânare Mf1 şi M f2 atât pe cale de rulare uscată, cât şi pe cale de rulare udă. A doua metodă de calcul a momentelor de frânare este dată de condiţia ca automobilul să realizeze la frânare o decceleraţie maximă afmax impusă.
În acest caz, forţa de frânare este dată de relaţia:

20
maxmax fa
faf ag
GamF ⋅=⋅= (6)
Momentul de frânare pe punţi fiind dat de relaţiile:
( )κγαϕϕ ⋅+⋅=⋅⋅+
⋅=⋅⋅= max1
max
11 ra
gf
rarf rGL
hg
ab
rGrZM
( )κγαϕϕ ⋅+⋅=⋅⋅−
⋅=⋅⋅= max2
max
22 ra
gf
rarf rGL
hg
aa
rGrZM (7)
în care s-au făcut următoarele notaţii:
;1 L
bα ;2 L
a=α ;L
hg=κ g
a f maxmax =γ
Raportul momentelor de frânare la cele două punţi este:
κγακγαλ
⋅−⋅+
===max2
max1
2
1
2
1
f
f
f
f
F
F
M
M (8)
Momentele de frânare Mf1 şi M f2 obţinute cu relaţiile (4) şi (7) sunt momentele de frânare la punţile autovehiculului. Pentru obţinerea momentului de frânare la frânele roţilor se împarte momentul de frânare de pe întreaga punte la numărul de frâne existent la acea punte. Pentru frâna de staţionare este necesar ca aceasta să asigure staţionarea în condiţiile opririi automobilului pe panta maximă impusă atât la urcare cât şi la coborâre. Momentul de frânare în acest caz se determină cu relaţiile:
- pentru cazul când frâna este dispusă pe roţile automobilului: αsin⋅= arf GrM (9)
- pentru cazul montării frânei de staţionare pe transmisia principală este necesar ca momentul de frânare să aibă expresia:
o
arf i
sinGrM
α⋅= (10)
unde: io - este raportul de transmitere al angrenajului transmisiei principale.
CALCULUL FRÂNELOR
1.CALCULUL FRÂNELOR CU TAMBUR ȘI SABOȚI INTERIORI
1.1. Calculul momentului de frecare pentru frânele simplex
În tabelul 1 s-au prezentat tipurile de frână cu saboţi şi tambur utilizate la automobile. Diferenţierea la aceste tipuri de frână, s-a făcut în funcţie de rolul îndeplinit de saboţi care pot fi:
- saboţi primari; - saboţi secundari.

21
În figura 17 este prezentată schema de principiu a unei frâne simplex care are în alcătuire un sabot primar şi altul secundar şi care-şi schimbă rolul în funcţie de sensul de mişcare.
Sub acţiunea forţei S, dată de pistonaşele cilindrului de frână saboţii 1 şi 3 articulaţi în punctele O1 şi O2 sunt apăsaţi asupra tamburului, producând frânarea acestuia.
Figura 17 În ipoteza unei presiuni de contact dintre sabot şi tambur simetric distribuită în
raport cu capetele garniturii de fricţiune, se pot folosi în calcule rezultantele N1 şi N2 ca forţe concentrate de contact şi care crează forţele de frecare F1 şi F2. Din ecuaţia de momente în raport cu articulaţia O1 rezultă:
( ) 011 =−++ cNeFcaS (1) în care, ţinând seama de expresia forţei de frecare 11 NF µ= ,se obţine:
ec
ceSN
⋅−+=µ1 (2)
ec
eaSF
⋅−+=µ
µ1 (3)
Notând cu rf- raza tamburului de frână, momentul de frânare realizat de sabotul 1 este:
ec
caSrM tf ⋅−
+=µ
µ1
(4)
Analog pentru sabotul 2 expresia momentului de frânare este:
ec
caSrM tf ⋅+
+=µ
µ2
(5)
Comparând cele două relaţii rezultă Mf1>Mf2 motiv pentru care sabotul 1 este numit sabot primar iar sabotul 2 sabot secundar. La sabotul primar forţa de frecare F1 contribuie la rotirea sabotului în jurul punctului O1, în sensul apropierii de tambur, iar la sabotul secundar forţa de frecare F2 roteşte sabotul în jurul punctului O2, în sensul depărtării de tambur. Constructiv la această variantă în scopul egalării uzurii celor doi saboţi, pentru sabotul primar, care frânează la mersul înainte, se prevede o garnitură mai mare decât la sabotul secundar.
Qx2
ω
Qx1
a
rt
S S
N1 N2
F2
e e
c β
F1
Qy1 Qy2
Qx2
1
3
2
O1 O2
4

22
Pentru a caracteriza eficacitatea unui sabot se foloseşte raporul dintre forţa tangenţială de frecare şi forţa de acţionare a sabotului
S
FE = (6)
Din relaţia 3 se observă că valoarea coeficientului E de eficacitate este funcţie de valoarea coeficientului de frecare dintre garnitura de fricţiune şi tambur şi de elementele geometrice ale sabotului. Funcţia de dependenţă ( )µfE = se numeşte caracteristică de stabilitate a sabotului. Dacă între cotele c şi e şi coeficientul de frecare µ există relaţia 0ec =− µ posibilă fizic, atunci conform relaţiei 4 momentul de frecare devine infinit de mare, acest fenomen reprezentând autoblocarea sabotului. Se observă că autoblocarea sabotului se produce numai la saboţii primari deoarece la saboţii secundari aşa cum se observă din relaţia 5 anularea numitorului este imposibilă.
1.2. Calculul momentului de frecare pentru frânele duplex În figura 18 este prezentată schema cinematică a acestui tip de frână şi modul cum acţionează forţele asupra saboţilor când ambii saboţi lucreză ca saboţi primari.
Figura 18 Cuplurile de frânare realizate de cei doi saboţi sunt:
ec
caSrMM t2f1f µ
µ−+== (7)
La inversarea sensului de rotaţie ambii saboţi lucrează ca saboţi secundari şi pentru calculul cuplurilor de frânare se folosesc relaţiile:
ec
caSrMM t2f1f µ
µ++== (8)
ω
O1
a
rt
S
S
N1
N2
F2
e
e
c
β a
c
O2
F1

23
1.3. Calculul momentului de frecare pentru frânele duo-duplex
O astfel de frână are o schemă cinematică prezentată în figura 19.
Figura 19 Figura 20 La aceste frâne saboţii sunt primari la ambele sensuri de rotaţie. Momemtele de frânare realizate de cei doi saboţi la ambele sensuri de rotaţie a tamburului sunt:
ec
caSrMM t2f1f µ
µ−+== (9)
1.4. Calculul momentului de frânare pentru frâne uni-servo
Aceste frâne sunt frâne cu amplificare la care saboţii se încarcă reciproc cu forţe suplimentare create de cilindrul hidraulic. O astfel de frână are schema cinematică reprezentată în figura 20. Se observă că în acest caz (mersul înainte), ambii saboţi sunt primari, frâna purtând din acest motiv denumirea de uni-servo la care pentru sabotul primar momentul de frânare este cel dat de relaţia:
ec
caSrM tf µ
µ−+=1 (10)
Pentru sabotul 2 care lucrează în acest caz tot ca sabot primar şi trebuie să determinăm forţa de acţionare Qx1 produsă de sabotul 1.
Ecuaţia de proiecţii pe orizontală este: 011 =+− xQNS (11)
şi ţinând seama de expresia forţei N1 dată de relaţia 2, rezultă:
ec
eaSQx µ
µ−+=1 (12)
Ecuaţia de momente a sabotului 2 în raport cu punctul de articulaţie Q este: ( ) 0221 =+−+ eFaNcaQx (13)
şi ţinând seama de expresia forţei de frecare 22 NF µ= , rezultă:
Qx2
ω
Qx1
a
S
N1 N2
F2
e
e
c
Qy1
Qy2
Qy1
F1
Qx1
rt
ω S S
S S
N2
N1
F2
F1
rt
a
a c
c
e
e
β

24
ea
caQN x µ−
+= 12 (14)
Cu relaţia 10 şi având rt- raza tamburului, expresia momentului de frânare realizat de sabotul 2 este:
( )( )( )( )eaec
caeaSrM tf µµ
µµ−−++=2 (15)
2. CALCULUL FRÂNELOR CU DISCURI
2.1. Calculul frânei disc deschise
Schema de principiu a frânei cu disc este redată în fig. 21, în care s-a notat cu
α unghiul la centru, în radiani, a zonei de contact dintre plăcile de fricţiune 2 şi discul frânei 5.
Figura 21 Aria zonei de contact ABCDE este:
( )22
2 ie rrA −= α (16)
deci presiunea de contact dintre plăcile de fricţiune şi disc, în ipoteza unei repartizări uniforme, este:
( )22
2
ie rr
N
A
Np
−==
α (17)
Pe elementul de arie în coordonate polare θρρ dddA ⋅⋅= va fi repartizată o forţă normală pdA=dN care crează la mişcarea relativă o forţă de frecare:
dNdFf µ= (18)
Momentul forţei de frecare elementare dFf în raport cu axul de rotaţie al discului este:
y C
α
dθ dA
dρ
ρ
D
E
x
1
N N
2

25
θρρµρ ddpdFdM ff2== (19)
Deci momentul total de frecare realizat de plăcuţele de fricţiune pentru nf suprafeţele de frecare:
( )332
3
1ief
er
irff rrnpdnpM −⋅⋅⋅=∫⋅⋅⋅= αµρραµ (20)
unde înlocuind expresia presiunii (2) rezultă relaţia de calcul a momentului de frânare realizat de frână:
nfrr
rrNM
ie
ief ⋅
−−
=22
33
3
2 µ (21)
Din relaţie se observă că acest moment nu este dependent de unghiul la centru α, adică de mărimea ariei de contact dintre placa de presiune şi discul frânei.
După modul de montare a plăcilor de fricţiune în etrier, frânele disc pot fi fără servoefect figura 22.a sau cu servoefect, figura 22.b.
a b c
Figura 22 Relaţiile de dependenţă între forţa S de acţionare, dată de cilindrul hidraulic şi
forţa N care apasă placa de fricţiune asupra discului vor fi: 0=′−− NNS µµ (22)
de unde rezultă forţa normală pe suprafaţa plăcii de fricţiune:
µµ ′+
=1
SN (23)
Pentru montajul cu servoefect figura 22.b, echilibrul de proiecţii ale forţelor ce acţionează asupra plăcii de fricţiune este:
0sincos =′+′′−− ββµ NNNS (24) 0sincos =′′−′− βµβµ NNN (25)
de unde rezultă forţa normală N:
( ) βµµµµβµ
tg
tgSN
−′+′+′+=
1
1 (26)
Se observă că dacă numitorul relaţiei se anulează forţa N devine infinită, situaţie care din punct de vedere fizic înseamnă autoblocare.
Pentru a evita acest fenomen, trebuie ca unghiul β să fie suficient de mic în raport cu unghiul βlim obţinut prin anularea numitorului:
µµµµβ
′−′+= 1
limtg (27)

26
Se observă că pentru β=0 în relaţia (26) se obţine situaţia plăcii de fricţiune fără servo. Cu forţa N, obţinută pentru fiecare caz în parte se calculează momentul de frânare realizat la discul de frână.
2.2. Calculul frânei disc închisă cu servoefect
Schema de principiu a acestei este dată în figura 23 unde sunt reprezentate
forţele ce apar în timpul frânării. Notând cu rb raza de montaj a bilelor, cu rc raza de montaj a cilindrului
hidraulic, nc- numărul de cilindri.
Figura 23 Ecuaţia de momente faţă de centrul O al discurilor dă expresia forţei
tangenţiale F la cercul de rază rb în condiţiile acţiunii forţei S a unui cilindru hidraulic:
b
cc
r
nrSF
⋅= (28)
Pentru simplificarea notaţiilor se poate considera pentru calcul o singură bilă şi se notează cu Nb - forţa de contact dintre aceasta şi discurile 1 şi 2.
Forţele de contact dintre discuri şi carcasă sunt notate N1, N2, iar forţele de frecare µN1 şi µN2 care exercită asupra discurilor au sensul dat de vectorul viteză unghiulară.
Din echilibrul de proiecţii al discului 1 rezultă:
0cos
0sin
1
1
=−=−+
ααµ
b
b
NN
NNF (29)
din care rezultă:
( )µαα
µα
−=
−=
tg
FN
tg
FN
b cos
1
(30)
Notând cu R - reacţiunea în sprijin a discului 2, cu µ ′ - coeficientul de frecare, ecuaţiile de echilibru sunt:
re ri
S
F
r b
r c
F F
µN2
µN1
N2
N1
Nb
Nb F
R
ω
ω
2
1

27
0sin
0cos
2
2
=−−=′−−
NNR
RNN
b
b
µαµα
(31)
de unde rezultă forţa de apăsare a discului 2:
( )( )µαµµαµ
−′−′−=tg1
tg1FN2 (32)
Din relaţiile (30) şi (32) se observă că dacă µα =tg numitorul se anulează şi forţele N1, Nb şi N2 devin infinit de mari rezultând fenomenul de autoblocare. Pentru evitarea acestui fenomen trebuie respectată condiţia µα >tg . La inversarea sensului de relaţie sensul forţelor de frecare µN1 şi µN2 se schimbă. Scriind iarăşi suma proiecţiilor pentru acest caz şi făcând calculele obţinem:
( )( )αµµµαµ
αµ tg
tgFN
tg
FN
+′−′−=
+=
1
1; 21 (33)
Din relaţiile (33) se observă că numitorul nu se poate anula, deoarece 0>+ αµ tg şi 1≤′µµ deci nu apare fenomenul de autoblocare.
La primul sens de frânare este evident din observarea forţelor de pe discul 2 că reacţiunea R are sensul din figură.
La inversarea sensului de frânare, din relaţiile (33) rezultă expresia reacţiunii:
( )( )αµµµµα
tg
tgFR
+′−−=
1 (34)
Dacă condiţia evitării autoblocării este îndeplinită 0>− µαtg reacţiunea R are sensul din figură şi indiferent de sensul de frânare discul 2 se sprijină pe reazem.

1
SUSPENSIA AUTOMOBILULUI
1. Rolul, condițiile impuse și clasificarea suspensiilor. La deplasarea automobilului, neregularitățile drumului produc oscilații ale roților
care se transmit punților. Suspensia automobilului realizează legătura elastică cu amortizare între punțile automobilului și cadru sau caroserie, rolul său fiind de a micșora sarcinile dinamice și de a amortiza vibrațiile rezultate în urma acțiunii componentelor verticale ale forțelor de interacțiune dintre roți și drum.
Viteza de deplasare a automobilului pe drumuri cu suprafață neregulată este limitată în primul rând de calitățile suspensiei și în al doilea rând de puterea motorului. Confortabilitatea automobilului, este determinată în primul rând de suspensie. Prin confortabilitate se înțelege proprietatea automobilului de a circula timp îndelungat cu vitezele permise de caracteristicile dinamice fără ca pasagerii să aibă senzații neplăcute sau să obosească repede și fără ca automobilul sau marfa transportată să fie supuse distrugerii.
Prin imprimarea caracterului dorit al oscilațiilor, suspensia, alături de mecanismul de ghidare al punții, influențează maniabilitatea și stabilitatea automobilului, elemente care împreună definesc ținuta de drum a automobilului.
Cinematica roților la trecerea peste denivelările căii, și a masei suspendate față de cea nesuspendată, la variația sarcinilor din planul vertical, sunt determinate de tipul mecanismului de ghidare al punții. Caracterul acestor mișcări este determinat de suspensia automobilului, prin elementele sale elastice și de amortizare. Pentru asigurarea unui confort corespunzător, parametrii suspensiei trebuie să fie aleși ținându-se seama de anumite condiții stabilite la teoria suspensiei, și anume:
- amplitudinea masei suspendate se reduce cu atât mai mult cu cât raportul dintre masa suspendată și cea nesuspendată este mai mare. Acesta explică avantajul punților articulate față de cele rigide și generalizarea primelor tipuri la automobilele cu confort sporit;
- pulsația oscilațiilor proprii ale sistemului este cu atât mai mică cu cât rigiditatea elementului elastic este mai mică, adică arcul este mai elastic. Micșorarea rigidității arcurilor este limitată de creșterea săgeții statice la sarcini nominale. Cum față de automobil nu se formulează cerințe de imobilitate la trecerea peste denivelări, rigiditatea suspensiei se alege în limite determinate de zonele de toleranță ale organismului uman, când acesta suferă o mișcare periodică verticală. Oscilațiile verticale acceptabile sunt cuprinse într-un interval situat în perioadele 1...1,5 s, corespunzătoare mersului pe jos cu o viteză de 3,5...7 km/h;
- rigiditatea suspensiei punții din față să fie mai mică decât cea a punții din spate. În timpul mersului, automobilul abordează obstacolele prin roțile din față, iar după o întârziere, dată de timpul de parcurgere al ampatamentului, de puntea din spate. În acest caz, cu toată întârzierea atacului punții din spate, roțile din spate ajung din urmă în mișcarea verticală roțile din față, deoarece perioada lor de oscilație este mai scurtă și se anulează oscilațiile de galop (oscilațiile în plan longitudinal). La autoturisme, caracterizate de viteze mari de deplasare și ampatamente mici, problema pierde din importanța sa;

2
- pentru menținerea neschimbată a caracteristicilor suspensiei când masa suspendată se modifică (repartiția maselor rămânând neschimbată), rigiditățile arcurilor trebuie să se modifice în aceeași proporție cu masa suspendată. Această condiție explică interesul pentru suspensii cu rigiditate proporțională cu sarcina;
- pentru asigurarea confortabilității, amortizarea oscilațiilor trebuie să varieze în prima perioadă între 92% și 98% din energia transmisă părții suspendate, corespunzător unor valori ale raportului dintre primele două amplitudini de 3,7...22,4. La amortizări mai mari, cresc sarcinile dinamice transmise părții suspendate prin amortizor, iar amortizări mai mici pot duce la balansarea caroseriei și a roților la deplasarea pe căi cu neregularități repetate. Confortabilitatea maximă se poate obține combinând arcuri cu rigiditate proporțională cu sarcina cu amortizoare cu caracteristici neliniare.
Clasificarea suspensiilor După tipul elementului elastic, suspensiile pot fi: cu elemente metalice (arcuri în
foi, arcuri elicoidale și bare de răsucire), cu elemente nemetalice (arcuri din cauciuc, arcuri pneumatice și hidropneumatice) și mixte.
După tipul caracteristicii elementelor elastice, suspensiile pot fi: cu caracteristică liniară (figura 1,a), cu caracteristică neliniară în trepte (figura 1,b) sau progresivă (figura 1,c).
Figura 1 Elementele elastice, indiferent de tipul sau caracteristica lor, pot forma funcție de
tipul mecanismului de ghidare al roților suspensii dependente (pentru punți rigide) sau independente (pentru punți articulate). Opțiunea pentru o punte sau alta se face funcție de tipul și destinația automobilului, prin aprecierea cerințelor de confort, maniabilitate, stabilitate și costuri.
Prin legarea roților unei punți de cealaltă sau a roților de pe aceeași parte între ele, se obține suspensia cu interacțiune.
2. Construcția și calculul suspensiei. 2.1. Caracteristica elastică a suspensiei. Caracteristica elastică a suspensiei reprezintă dependența dintre forța verticală
care acționează asupra roții și deformația elementului elastic al suspensiei. În figura 2 este reprezentată caracteristica elastică. Datorită frecării din elementul
elastic, curbele - de comprimare și de destindere - nu coincid. Aria cuprinsă între cele două curbe reprezintă, la scară, lucrul mecanic de histerezis pentru un ciclu complet de întindere-comprimare, transformat prin frecarea internă în căldură, ce se transmite mediului ambiant.
F F
f f
F
f

3
Figura 2 Figura 3 În mod convențional, se consideră drept caracteristică a suspensiei curba medie
reprezentată cu linia întreruptă. Parametrii curbei caracteristice a suspensiei sunt: Săgeata statică fst produsă de sarcina statică Gs, care este un parametru esențial de
definire a elementului elastic, deoarece determină mărimea frecvenței oscilațiilor proprii ale suspensiei, conform relației:
[ ]Hzff
g
stst
5,31
10
13
≅= −πγ (1)
în care: g este accelerația gravitației; fst - săgeata statică, exprimată în mm.
Săgeata statică se obține ducând din punctul de pe caracteristică corespunzător sarcinii statice o tangentă la curba medie. Tangenta trigonometrică a unghiului format de tangenta geometrică la curba convențională și axa absciselor definește rigiditatea suspensiei (KS) sau constanta elastică a suspensiei (KS = tg α). Pentru o caracteristică liniară, valoarea KS este aceeași în toate punctele curbei (KS = F/f ). În cazul general, caracteristica elastică a suspensiei este neliniară și prin urmare constanta elastică este variabilă (KS = dF/df ).
În figura 3 sunt prezentate, pe baza studiului parametrilor unui mare număr de automobile, valorile recomandate ale săgeții statice și frecvențele proprii rezultate pentru autoturisme (figura 3,a), autobuze (figura 3,b) și autocamioane (figura 3,c). Domeniul marcat cu 1 corespunde recomandărilor pentru puntea din față, iar domeniul marcat cu 2 corespunde recomandărilor pentru puntea din spate. Pentru evitarea oscilațiilor de galop, raportul săgeților alese trebuie să fie cuprins în limitele recomandate în figură.
Săgețile dinamice fd1 și fd2, care sunt limitate de tampoanele elastice din cauciuc ale suspensiei. La săgeți egale cu f1 și f2 , mecanismul de ghidare al punții vine în
a
b

4
contact, în planul de oscilație, cu limitatoarele elastice ale suspensiei. În intervalul f1...f2 caracteristica suspensiei este dată numai de proprietățile elementului elastic al suspensiei. Intrarea în funcțiune a tampoanelor modifică curba caracteristică a suspensiei.
Coeficientul dinamic Kd , definit de raportul dintre forța maximă transmisă prin suspensie, până la deformarea maximă a limitatoarelor și sarcina statică:
s
d G
FK max= (2)
La valori mici ale coeficientului dinamic, se observă, în cazul deplasării automobilului pe drumuri cu neregularități, lovituri frecvente în tampoanele limitatoare. La valori mari ale coeficientului Kd, în cazul vibrațiilor cu amplitudini mari și valori mici ale săgeții dinamice, suspensia va fi foarte rigidă. Pericolul lovirii în tampoane și mărimea Kd sunt dependente de mărimea săgeții dinamice. Cu cât este mai mare săgeata dinamică cu atât este mai ușor de obținut confortabilitatea necesară cu un coeficient dinamic mare și mai ușor de asigurat un contact permanent al roților cu calea. Cresc însă deplasările caroseriei față de roți, determinând o reducere a stabilității automobilului. Cu cât viteza automobilului și neregularitățile căii sunt mai mari, cu atât trebuie să fie mai mare și săgeata dinamică.
Valorile recomandate pentru coeficientul dinamic Kd sunt cuprinse în limitele 1,7...1,8 pentru automobilele obișnuite și 3...4 pentru automobilele cu capacitate mare de trecere. Valorile săgeților dinamice se adoptă în funcție de săgețile statice între limitele: fd = 0,5fst la autoturisme; fd = 0,75fst la autobuze; fd = 1,0 fst la autocamioane.
Alegerea caracteristicii elastice a suspensiei trebuie să satisfacă simultan condițiile adoptate pentru fst, fd și Kd când Gs = const. Aceste condiții pot fi îndeplinite numai printr-o caracteristică neliniară a suspensiei.
Figura 4 Figura 5 În figura 4 este reprezentată o familie de caracteristici neliniare care satisfac
condițiile de mai sus, realizate cu ajutorul unui arc suplimentar, destinat măririi coeficientului dinamic. Caracteristica 1 este nesatisfăcătoare, deoarece, la oscilații mici (în jurul săgeții statice fst), rigiditatea suspensiei crește mult. Caracteristica 2 satisface condițiile de confort la variații mici ale sarcinii dinamice, dar la valori mari, datorită rigidității foarte ridicate a elementului elastic suplimentar, suspensia devine foarte rigidă, intrarea lui în acțiune provocând șocuri în suspensie. Cele mai bune rezultate le dă o caracteristică de forma 3, care, în apropierea săgeții statice (cele mai întâlnite

5
săgeți), are o rigiditate constantă; realizarea coeficientului dinamic dorit se face printr-un element elastic nu prea rigid. Coeficientul dinamic al suspensiei cu arc suplimentar se determină cu relația:
( ) ( )[ ]asssasdssss
d fKKffKGGG
FK '
12
max ++−+== (3)
Dar stss fKG = și deci:
st
as
s
s
st
dd f
f
K
K
f
fK
'1 2 ++= (4)
unde Ks′ este rigiditatea arcului suplimentar. Adoptând valoarea necesară pentru coeficientul dinamic, din relația (4) se poate
determina rigiditatea arcului suplimentar. Săgeata arcului suplimentar se determină din condiția ca rigiditatea suspensiei să
nu se modifice la săgeți de până la 70-80 mm (fas = fd2 - (70-80 mm)). La mărirea sau micșorarea sarcinii utile, săgeata statică a suspensiei se modifică.
Greutatea suspensiei se modifică la încărcarea-descărcarea automobilelor în medie cu 10-30% la puntea din față și cu 40-60% la puntea din spate în cazul autoturismelor; 200-250% la autobuze și 250-400% la autocamioane. În acest caz, este necesară o familie de curbe caracteristice (figura 5) care să asigure aceeași săgeată statică.
În general, pentru obținerea caracteristicii elastice optime a suspensiei, se utilizează elemente elastice suplimentare. Dacă sarcina utilă a automobilului variază în limite largi, se utilizează cel puțin două elemente elastice suplimentare, dintre care primul destinat limitării domeniului de variație a săgeții statice la variația sarcinii utile, iar al doilea pentru mărirea coeficientului dinamic.
O caracteristică elastică mai bună se poate obține prin întrebuințarea arcurilor din cauciuc care au caracteristică progresivă. Caracteristica elastică optimă, cu menținerea constantă a săgeții statice (familii de curbe ca în figura 5), se obține prin utilizarea elementelor elastice pneumatice sau hidropneumatice.
2.2. Construcția suspensiei cu elemente elastice metalice.
2.2.1. Construcția suspensiei cu arcuri în foi.
Caracterul deplasărilor punții automobilului este determinat de parametrii arcului, adică arcurile în foi îndeplinesc alături de rolul elementului elastic și pe cel al elementului de ghidare. Uneori, arcul în foi ține și locul elementului de amortizare.
Suspensia cu arcuri în foi are avantajul că preia odată cu forțele verticale și forțele longitudinale și transversale, forțe ce apar în contactul dintre pneu și cale fără a necesita elemente de ghidare suplimentare. Ca dezavantaje principale pentru arcurile în foi se pot menționa: greutate mare, durabilitate redusă, frecare între foile de arc intensă, necesită spațiu de amplasare mare.
De cele mai multe ori, arcul în foi, dispus longitudinal sau transversal, față de axa automobilului, se folosește la suspensiile dependente. Sunt însă cazuri când arcul în foi dispus transversal se folosește și la suspensiile independente.

6
Pentru a putea transmite cadrului automobilului forțele longitudinale de tracțiune sau de frânare, arcul în foi se leagă de cadru printr-o articulație simplă la un capăt și printr-o articulație mobilă cu cercel la celălalt capăt. În figura 6,a se reprezintă elementele componente ale arcului în foi, la care se deosebesc: lamelele principale 1, ochiul articulației fixe 2, ochiul articulației mobile 3, bridele de strângere 4, bulonul 5 de centrare a arcului în foi pe puntea automobilului, bridele 6 de fixare a lamelelor de arc pe punte, bridele 7 ale articulației mobile cu cercel.
Figura 6 Pe arcul în foi se află montat tamponul elastic suplimentar 8, care limitează
amplitudinea oscilațiilor punții în raport cu caroseria și care se opune atingerii deformațiilor maxime periculoase.
Bridele de fixare 6 nu permit rotirea punții sub acțiunea momentelor reactive, realizându-se astfel o legătură rigidă între arcul în foi și punte.
Caracteristica elastică a arcului în foi, din figura 6,a este liniară (figura 6,b). Prin intrarea în funcțiune a tamponului elastic suplimentar 8, caracteristica elastică devine neliniară (figura 6,c), suspensia îmbunătățindu-se.
Durata de funcționare a arcului în foi este determinată în principal de uzura articulațiilor. La articulațiile la care se folosesc bolțurile 9 și bucșele de bronz 10, este necesară ungerea periodică a ansamblului bolț-bucșe. Experimental s-a constatat că articulațiile au o durată de funcționare de 2...4 ori mai scurtă decât elementul elastic. Pentru eliminarea acestui neajuns, s-a căutat înlocuirea bucșelor de bronz cu bucșe din cauciuc 1 (figura 7), a căror lungime în stare liberă este mai mare decât în stare montată. Pentru a se asigura o strângere corespunzătoare a bucșei de cauciuc pe bolț se montează șaibele elastice 2.
7 8
4
1
0
9 2
1
3
5
6
c f f
F F
b a

7
Figura 7 Figura 8 În figura 8 se reprezintă suspensia dependentă a unei punți din față cu arc în foi
dispus transversal, la care sarcinile verticale și momentele reactive sunt preluate prin barele de ghidare 1; arcul, nemaifiind și element de ghidare, preia doar sarcinile verticale.
Tot pentru prelungirea duratei de funcționare a articulațiilor, s-au realizat arcuri în foi ale căror capete sunt fixate pe pernele de cauciuc 1 și 2 (figura 9).
Figura 9 O astfel de fixare nu mai necesită ungere, cerceii nu mai sunt necesari, deoarece
pernele din cauciuc permit modificarea lungimii arcului în timpul lucrului. Totodată, se reduce și răsucirea arcului în foi, iar prin montarea limitatorului 3 se reduce momentul încovoietor ce acționează în timpul frânării și se realizează o caracteristică elastică neliniară.
În figura 10 se prezintă soluții constructive de prindere a foilor principale de articulațiile fixe sau mobile de fixare a arcului pe cadrul automobilului. Capetele foii principale sunt îndoite, formând ochiuri cu care arcul se fixează pe bolțurile articulațiilor (figura 10, a și d). Pentru a mări rezistența foii principale pe ochiul acesteia, se înfășoară, uneori, cu joc, capătul foii a doua (figura 10, b). Se pot întâlni și articulații la care ochiul primei lamele principale este dublat parțial de a doua lamelă principală (figura 10, c).
2
1
1
1
3
2

8
Figura 10 Figura 11 Secțiunea foilor de arc obținute prin laminarea oțelului este standardizată, formele
fiind diferite. Astfel, în figura 11 se reprezintă mai multe secțiuni de foi dintre cele mai folosite. La foaia de arc, partea superioară a secțiunii lucrează la întindere, iar partea inferioară la compresiune. La foaia de arc de secțiune dreptunghiulară (figura 11, a) fibra medie deformată este la egală distanță de partea superioară și partea inferioară, eforturile unitare de întindere și de compresiune fiind egale. Deoarece la solicitările variabile eforturile unitare de întindere sunt mai reduse decât cele de compresiune, s-au realizat foi de arc de secțiuni diferite de cea dreptunghiulară (figura 11, b, c), care urmăresc prin deplasarea fibrei medii spre partea superioară o reducere proporțională a mărimii eforturilor de întindere. Varianta de secțiune cu canelură (figura 11, d) împiedică deplasarea laterală relativă a foilor de arc.
Foile de arc au în stare liberă curburi diferite. La asamblare, ele se montează cu eforturi unitare inițiale. La oscilațiile suspensiei, între foile de arc apar forțe de frecare care generează apariția eforturilor unitare de contact ce se însumează cu eforturile unitare inițiale. Aceste eforturi însumate conduc, în timp, la apariția pe suprafața foilor de arc a unor zgârieturi, care sunt primele semne ce duc la ruperea la oboseală. Fenomenul de apariție a oboselii materialului foilor de arc se caută a fi redus prin adoptarea unor soluții constructive care urmăresc reducerea frecării nemijlocite dintre foile de arc. Astfel, încă de la montaj, între foile de arc se introduce unsoare consistentă în care se adaugă praf de grafit.
Aceasta presupune adoptarea unei secțiuni corespunzătoare a foii de arc (figura 11, c) care să poată reține lubrifiantul între lamele. O altă soluție din ce în ce mai folosită este aceea a adăugirii între lamele a unor garnituri speciale din cauciuc sau material plastic (figura 12), soluție care elimină frecarea nemijlocită dintre foile de arc. Reducerea forței de frecare se poate obține și prin reducerea numărului de foi de arc, prin alegerea unor raze inițiale de curbură ale foilor de arc, care, la asamblare, să permită realizarea unor eforturi unitare de contact scăzute.

9
Figura 12 Suspensia cu arcuri în foi se dimensionează la sarcina maximă posibilă. Drept
urmare, la deplasarea automobilului gol sau cu sarcină parțială, suspensia având ca element elastic arcul în foi este prea rigidă. În cele ce urmează se prezintă câteva suspensii cu arcuri în foi, care, prin soluțiile constructive adoptate, realizează corectarea caracteristicii liniare prin transformarea acesteia într-o caracteristică în trepte sau progresivă cu implicații directe asupra calităților de confort. Aceste soluții urmăresc îmbunătățirea legii de variație a forței de frecare din arcul în foi, care este, de obicei, puțin sensibilă la modificarea deformației.
Figura 13 În figura 13, a se reprezintă construcția unei suspensii cu arc în foi cu cap
alunecător. În acest caz, capătul liber 1 alunecă pe suprafața curbă a suportului 2, astfel încât lungimea sa activă se micșorează odată cu creșterea sarcinii. Caracteristica elastică a acestei suspensii este ușor variabilă (figura 13, b).
Figura 14
2
b a f
F
1
1 4
3
2
a b

10
Suspensia din figura 14, a are o caracteristică elastică progresivă, care se realizează prin rezemarea capătului alunecător 2 al arcului principal 1, pe arcul suplimentar 3, fixat în consolă pe structura de rezistență a automobilului. Caracteristica suspensiei este dată de caracteristica celor două arcuri. Deoarece, odată cu variația sarcinii pe punte, are loc modificarea lungimilor active ale celor 2 arcuri, caracteristica este progresivă (figura 14, b). Rola 4 împiedică desprinderea arcului principal de arcul suplimentar.
În figura 15 este reprezentată soluția la care ambele capete ale arcului în foi se reazemă liber pe suporturile profilate 2, permițând modificarea lungimii de lucru a arcului, respectiv a rigidității lui. Pentru ghidarea punții 3, suspensia este prevăzută cu o foaie suplimentară 2, legată de arcul principal și articulată de cadru.
Figura 15 Suspensia cu arcuri în foi duble (figura 16, a) se folosește mai ales la puntea din
spate a autocamioanelor.
Figura 16 Arcul principal 1 este fixat ca în figura 6; arcul suplimentar 2 este legat de arcul
principal și rezemat pe suporturile profilate 3. Suspensia dimensionată pentru sarcina maximă este prea rigidă pentru automobilul gol. Suspensia cu arc suplimentar corespunde, deoarece la încărcări mici și mijlocii lucrează numai arcul principal. Când sarcinile depășesc o anumită valoare corespunzătoare săgeții f 1 a arcului principal, intră în acțiune și arcul suplimentar. Prin funcționarea simultană a celor 2 arcuri, suspensia se rigidizează, crește coeficientul de încărcare dinamică, caracteristica elastică devenind neliniară (figura 16, b).
1 8 6 5 4
3
2
3 2
7
3 3 2
1
f
F
f
b a

11
Figura 17
Suspensia cu arcuri în foi de tip balansier (figura 17) se folosește la punțile din spate ale automobilelor cu trei punți. Această soluție este formată din arcul în foi 1, care se prinde de cadrul automobilului prin intermediul balansierului 2. Capetele arcului sunt rezemate alunecător pe cele două punți. Legătura dintre punți și cadrul automobilului se realizează cu ajutorul tijelor balansoare 3 și 4. Avantajul acestei construcții este dat de faptul că cele două punți au posibilitatea de a se deplasa independent una față de alta, la trecerea peste denivelări. Soluția asigură oscilarea celor două punți, împreună cu arcul în foi, în jurul balansierului 2 și, deci, în acest mod, se realizează un contact corespunzător al pneurilor cu calea de rulare, și are loc o mai bună distribuire a încărcării pe punți.
Arcul în foi parabolic (figura 18) se numește astfel deoarece grosimea foilor scade parabolic de la mijloc către capete, solicitarea de-a lungul foilor fiind uniformă. Foile arcului având aceeași lungime, se îmbunătățește rigiditatea transversală, dar apare necesitatea montării amortizoarelor ca urmare a frecării mici dintre foi.
Figura 18
A-A
3 2
1
4
3 4 A
A

12
La aceeași capacitate de încărcare, greutatea acestor arcuri este cu 33% mai mică, numărul de foi se reduce, de la 10...12 la arcul obișnuit, la 3...4; efortul maxim de încovoiere este cu 10% mai mare comparativ cu arcul în foi obișnuit.
Figura 19 O altă utilizare a arcului în foi este la suspensiile independente prin dispunerea
transversală față de axa automobilului (figura 19). Arcul 1 este încastrat la un capăt în reazemul 2, pe cadrul automobilului, celălalt capăt fiind articulat la mecanismul de ghidare al roților, format din suportul roții 4 și brațul superior oscilant 3. Împreună cu acestea, arcul în foi dispus transversal formează mecanismul patrulater de ghidare. Există și soluții constructive la care arcul în foi transversal este montat deasupra brațului oscilant 3.
4
3
2 1

13
CALCULUL ELEMENTELOR ELASTICE METALICE
1. Elemente de calcul al arcului în foi. Calculul suspensiei cu arc în foi constă din calculul la solicitări dinamice și
calculul la oboseală. Eforturile unitare ce se dezvoltă în arcul în foi depind de modul de transmitere a forțelor și momentelor de la punte la cadru, precum și de regimul de deplasare al automobilului. Calculul la solicitările dinamice se face în regimul tracțiunii și regimul frânării. Calculul la oboseală are ca scop determinarea duratei de funcționare a arcului.
Calculul la solicitări dinamice. Mărimea eforturilor unitare de încovoiere, întindere și compresiune la care sunt
supuse foile de arc depinde de soluția folosită la ghidarea punții. Reacțiunile RA și RB (tabelul 1) solicită foile de arc, prin momentul creat, la încovoiere. Forța XR,f din reazemul A, solicită foile principale la compresiune sau întindere în funcție de regimul de deplasare al automobilului (regimul tracțiunii, respectiv al frânării).
În calculul la solicitări dinamice se ține seama de influența sarcinilor dinamice prin folosirea în calcule a coeficientului dinamic kd, ale cărui valori sunt date în tabelul 2.
Mărimea frecării dintre foile de arc prezintă importanță deosebită, deoarece o frecare prea mare reduce din elasticitatea arcului. Această mărime este luată în considerație în calcule prin expresia randamentului arcului η, definit de relația:
F
Fef=η (1)
în care: Fef - este forța de deformație a arcului; F - forța reală de încărcare a arcului la ochiul de fixare. Efortul unitar admisibil calculat cu relațiile din tabelul 1 trebuie să fie, la săgeata
maximă, σai = 800-900 N/mm2, iar la săgeata statică mai mic de 500-600 N/mm2. Calculul la oboseală al arcului în foi. Se face în scopul determinării timpului de funcționare a arcului până la apariția
primelor semne de oboseală a materialului. Metoda de calcul constă în determinarea lucrului mecanic specific de deformație al foilor de arc. Acesta se definește ca fiind raportul dintre lucrul mecanic consumat pentru deformarea arcului și aria secțiunii transversale a pachetului de foi. Pentru oțelul de arc aliat cu Mn și Si, lucrul mecanic specific se calculează cu relația:
espL γ6102,1 ⋅= [Nm/cm2] (2)
în care: γe este coeficientul de revenire, a cărui mărime este funcție de timpul de repaus al arcului (tabelul 3).
Calculul lucrului mecanic efectiv se face în trei stări specifice de încărcare a arcului, și anume: încărcat (1/1), semiîncărcat (1/2) și gol (0). Procentul din parcursul total al automobilului ce revine fiecăreia din cele trei stări, se consideră a fi 60% încărcat și 20% semiîncărcat și, respectiv gol.
Șocurile ce apar în exploatare se grupează în trei categorii: puternic p, mediu m și ușor u.

14
Tabelul 1

15
Tabelul 2 – Valorile coeficientului dinamic Kd
Săgeata la încărcare 1/1, mm Viteza km/h 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 210 220
10 1.77 1,76 1,75 1,74 1,73 1,71 1,68 1,64 1,59 1,53 1,46 1,38 1,31 1,25 1,20 1,16 1,13 1,13
20 1.81 1.80 1,79 1,77 1,75 1,74 1,71 1,67 1,62 1,56 1,50 1,44 1,36 1,30 1,24 1,18 1,15 1,12
30 1.89 1.88 1.86 1.83 1.80 1,77 1,75 1,71 1,67 1,62 1,56 1,50 1,44 1,36 1,30 1,24 1,18 1,15 1,12
40 2,01 1,99 1,95 1,92 1.87 1.83 1,79 1,76 1,72 1,68 1,62 1,56 1,50 1,44 1,36 1,30 1,24 1,18 1,15 1,12
50 2,17 2,13 2,09 2,03 1,98 1.86 1.86 1.82 1,78 1,74 1,68 1,62 1,56 1,50 1,44 1,36 1,30 1,24 1,18 1,15 1,12
60 2,37 2,31 2,24 2,17 2,10 2,02 1,95 1,89 1,85 1,81 1,75 1,69 1,62 1,56 1,50 1,44 1,36 1,30 1,24 1,18 1,15 1,12
70 2,40 2,32 2,24 2,14 2,06 1,99 1,93 1,89 1,83 1,77 1,70 1,62 1,56 1,50 1,44 1,36 1,30 1,24 1,18 1,15
80 2,38 2,28 2,18 2,10 2,04 1,98 1,93 1,86 1,78 1,71 1,62 1,56 1,50 1,44 1,36 1,30 1,24 1,18
90 2,32 2,22 2,17 2,10 2,03 1,96 1,89 1,81 1,72 1,63 1,56 1,50 1,44 1,36 1,30 1,24
100 2,32 2,22 2,16 2,08 2,00 1,92 1,83 1,73 1,63 1,56 1,50 1,44 1,36 1,30
110 2,34 2,30 2,22 2,13 2,04 1,95 1,84 1,73 1,63 1,56 1,50 1,44 1,36
120 2,30 2,28 2,18 2,08 1,98 1,86 1,73 1,63 1,56 1,50 1,44
Tabelul 3
Parcursul anual, n km/h 2500 5000 7500 10000 12500 15000 17500 20000 22500 25000 50000 75000 100000
km/an, % 1 2 3 4 5 6 7 8 9 10 20 30 40
γ0 8,000 7,530 7,133 6,805 6,639 6,332 6,158 6,009 5,872 5,680 4,331 3,308 2,555
Considerând amplitudinea oscilațiilor h=f/2, lucrul mecanic de deformație
efectuat de arc la o oscilație completă va fi: L = 2hF (3) Dacă se notează cu Ω - frecvența proprie de oscilație a arcului, în oscilații/min și
cu α - timpul de oscilație cu frecvența proprie, atunci, într-un minut, arcul va efectua αΩ oscilații complete. Lucrul mecanic efectuat într-o oră va fi:
100
602 Ω= αηhFL [Nm/h] (4)
unde: h este amplitudinea, în cm; F - forța pe arc, în N; Ω - frecvența proprie, în oscilații/min; η - randamentul arcului. În tabelul 4 este dată legătura dintre amplitudinea oscilației h și timpul de
oscilație α în funcție de starea de încărcare a arcului și tipul șocului primit. Amplitudinea reală h se calculează cu ajutorul coeficientului dinamic kd (tabelul 2) și al amplitudinii etalon F1/1:
h = f1/1kd (5) Calculul lucrului mecanic se face în cele trei stări de încărcare ale automobilului
la cele trei tipuri de șoc: L0 = (L0)u + (L0)m + (L0)p L1/2 = (L1/2)u + (L1/2)m + (L1/2)p (6) L1/1 = (L1/1)u + (L1/1)m + (L1/1)p Lucrul mecanic total efectuat de arc într-o oră, raportat la secțiunea arcului A,
reprezintă lucrul mecanic specific pe oră și are expresia:
A
L
A
L
A
LLsh
)(6,0)(2,0)(2,0 1/12/10 ++= [Nm/cm2h] (7)

16
Tabelul 4 Amplitudinea h și timpul relativ de oscilare
Amplitudinea h și timpul relativ α Felul șocului Șoc ușor Șoc mediu Șoc puternic
Sarcina hu [mm] αu hm [mm] αm hp [mm] αp Gol (0) 2,50 0,500 5,00 0,800 13,00 0,08 Încărcat (1/2) 1,75 0,575 4,50 0,120 11,00 0,12 Încărcat (1/1) 1,00 0,650 4,00 0,160 9,00 0,16
Timpul efectiv de lucru al arcului se calculează cu raportul:
nsh
e
sh
spef t
LL
Lt ≥
⋅==
γ6102,1 [h] (8)
unde tn este timpul normal de funcționare al automobilului. Acesta se poate calcula cu relația:
m
nV
St = [h] (9)
în care: S este spațiul efectiv parcurs de automobil până la prima reparație capitală; Vm - viteza medie de deplasare a automobilului.
Relația (8) arată că prin calculul de durabilitate se determină timpul de funcționare al arcului în foi, care trebuie să fie cel puțin egal cu timpul teoretic de funcționare al automobilului. În cazul în care condiția impusă de relația (8) nu este respectată, se impune refacerea calculelor prin redimensionarea foilor de arc, deoarece rigiditatea arcului este prea mică.
Săgeata reală a arcului în foi se calculează cu relația:
EIk
Flf
a
η2= [mm] (10)
în care: F este forța reală de încărcare a arcului la ochiul de fixare; l - brațul pârghiei de arcuire; η - randamentul arcului; ka - coeficient de formă; E - modulul de elasticitate longitudinal pentru oțel; I - suma momentelor de inerție ale foilor.
Din tabelul 2 se obține coeficientul dinamic kd, în funcție de viteza maximă, și săgeata f = f1/1, calculată cu relația (10) pentru F = F1/1.
Viteza maximă a automobilului prevăzut cu o suspensie cu arcuri în foi se poate determina în funcție de coeficientul dinamic kd și de săgeata f1/1.
Coeficientul dinamic kd se determină cu relația:
ef
dkσ
σ max= (11)
în care: σef este efortul unitar efectiv din arc la sarcina completă; σmax = (0,85...0,9) σr. Cunoscând și săgeata statică f1/1, din tabelul 2 va rezulta viteza de deplasare a
automobilului. Dacă valoarea găsită este mai mică decât valoarea vitezei maxime dată prin tema de proiectare, arcul va trebui recalculat, fiind prea rigid.

17
2. Elemente de calcul al arcurilor elicoidale. Forța activă F ce acționează asupra arcului elicoidal al suspensiei se determină
din figura 1, relația de calcul fiind următoarea:
1
2)(l
lgZF R−= (12)
unde: Z este reacțiunea normală ce acționează asupra roții; gR - greutatea roții și a mecanismului de ghidare montat sub arc (pentru calculele preliminarii se recomandă gR
≅ 0,1 Z).
Figura 1 Rigiditatea arcului elicoidal este dată de relația:
3
4
8nD
Gd
f
FK == (13)
în care: n este numărul de spire active; D - diametrul mediu al arcului; d - diametrul spirei; G - modulul de elasticitate transversal.
Dacă se notează cu f săgeata arcului corespunzătoare unei deplasări z a roții, se poate scrie relația:
2
1
l
lzf = (14)
Înlocuind relațiile (12) și (14) în (13) se obține expresia rigidității suspensiei cu arc elicoidal redusă la roată:
( )
21
22
2
1
1
2
l
l
z
gZ
l
lz
l
lgZ
f
FK R
R
⋅−=−
== (15)
Se observă că forma caracteristicii suspensiei cu arc elicoidal este liniară. Calculul propriu-zis de dimensionare a arcului elicoidal este dat în tabelele 5 și 6.

18
Tabelul 5
Relații de calcul pentru arcurile elicoidale Elementul de calcul
Relații de calcul și recomandările necesare
Indicele arcului i d
Di m= ; se recomandă i ≥ 4...5
Săgeata arcului f
4
38
Gd
FDnf m= în care:
n = nr. spirelor active; F = forța preluată de arc; Dm = diametrul mediu al arcului; G = modulul de elasticitate transversal = 8⋅104 N/mm2; d = diametrul spirei arcului
Efortul unitar la răsucire τt
53
1070008
⋅=≤= atm
td
kFDτ
πτ N/m2
k = coeficientul de corecție (vezi tabelul 6) Forța maximă ce poate fi preluată de arc F
atmkD
dF τπ
8
3=
Tabelul 6 Coeficientul de corecție K, în funcție de raportul D/d
D/d 2,5 3 4 5 6 7 8 9 10 K 1,70 1,55 1,39 1,29 1,24 1,20 1,18 1,16 1,14
3. Elemente de calcul al barelor de răsucire. Reacțiunea normală Z ce acționează asupra roții creează în bară (figura 2) un
moment de răsucire Mt = Zr. Legătura între Mt și unghiul de răsucire ϕ al barei este dată de relația:
p
t
GI
lM=ϕ (16)
în care: G este modulul de elasticitate transversal; Ip - momentul de inerție polar. Caracteristica elastică a suspensiei cu bare de răsucire este dată de dependența dintre momentul de torsiune și unghiul de răsucire al barei. Din relația (16) se constată că această caracteristică este liniară.
Figura 2
Din figura 2 rezultă: r
z=ϕ (17)
unde: z reprezintă înălțimea deplasării roții.

19
Caracteristica elastică a suspensiei cu bare de răsucire redusă la roată se obține
egalând relațiile (16) și (17): r
z
GI
lM
p
t ==ϕ (18)
Rigiditatea suspensiei va fi dată de relația:
lr
GI
z
ZK
2p== = const. (19)
Relațiile de calcul pentru barele de răsucire sunt date în tabelul 7.
Tabelul 7 Relații pentru calculul arcului bar ă de răsucire
Schema de calcul Elementul de calcul Relațiile de calcul Observații Momentul de răsucire M t, N⋅m
ZrM t =
Unghiul de răsucire al barei ϕ, rad
p
t
GI
lM=ϕ
Deplasarea z a capătului liber al barei, mm
p
t
GI
lrMz =
Lungimea de lucru l, mm
at
Gdl
τϕ2
=
τat = 700-900 N/mm2