
CUPRINS - ihp.roihp.ro/program4/2007/EESAHRS/etape_realizate/etapa_IV.pdf · diafragmă şi două...
31
1 CUPRINS pag. OBIECTIVE GENERALE…………………………………………….. 2 OBIECTIVELE FAZEI DE EXECUŢIE……………………………… 2 REZUMATUL FAZEI………………………………………………… 3 DESCRIEREA ŞTIINŢIFICĂ ŞI TEHNICĂ…………………………. 4 Cap.1 EXECUŢIA DISPOZITIVULUI DE SIMULARE A SARCINII PENTRU MOTOARE HIDRAULICE ROTATIVE (MVR)..................... 4 Cap.2 CONSTRUCŢIA, FUNCŢIONAREA ŞI UTILIZAREA SERVOPOMPEI CU PISTOANE RADIALE MOOG TIP RKP-D.......... 5 Cap.3 SIMULAREA NUMERICĂ ŞI TESTAREA SERVOMECANISMULUI HIDRAULIC DE REGLARE A CAPACITĂŢII POMPEI CU PISTOANE RADIALE MOOG TIP RKP-D............................................. 7 Cap.4 SIMULAREA NUMERICĂ A POMPEI MOOG TIP RKP-D.................. 15 Cap.5 TESTAREA POMPEI MOOG TIP RKP-D............................................... 17 ANEXE: Schemă hidraulică dispozitiv simulare sarcină (cod DSSq-SH)............ - Schemă hidraulică stand probare dispozitiv sarcină (cod SPDM- SH)............................................................................................................... - Specificaţie tehnică dispozitiv sarcină şi stand........................................ - CONCLUZII…………………………………………………………… 30 BIBLIOGRAFIE……………………………………………………….. 31
Transcript of CUPRINS - ihp.roihp.ro/program4/2007/EESAHRS/etape_realizate/etapa_IV.pdf · diafragmă şi două...
1
CUPRINS
pag.
OBIECTIVE GENERALE…………………………………………….. 2
OBIECTIVELE FAZEI DE EXECUŢIE……………………………… 2
REZUMATUL FAZEI………………………………………………… 3
DESCRIEREA ŞTIINŢIFICĂ ŞI TEHNICĂ…………………………. 4
Cap.1 EXECUŢIA DISPOZITIVULUI DE SIMULARE A SARCINII
PENTRU MOTOARE HIDRAULICE ROTATIVE (MVR)..................... 4
Cap.2 CONSTRUCŢIA, FUNCŢIONAREA ŞI UTILIZAREA
SERVOPOMPEI CU PISTOANE RADIALE MOOG TIP RKP-D.......... 5
Cap.3 SIMULAREA NUMERICĂ ŞI TESTAREA SERVOMECANISMULUI
HIDRAULIC DE REGLARE A CAPACITĂŢII POMPEI CU
PISTOANE RADIALE MOOG TIP RKP-D............................................. 7
Cap.4 SIMULAREA NUMERICĂ A POMPEI MOOG TIP RKP-D.................. 15
Cap.5 TESTAREA POMPEI MOOG TIP RKP-D............................................... 17
ANEXE:
Schemă hidraulică dispozitiv simulare sarcină (cod DSSq-SH)............ -
Schemă hidraulică stand probare dispozitiv sarcină (cod SPDM-
SH)............................................................................................................... -
Specificaţie tehnică dispozitiv sarcină şi stand........................................ -
CONCLUZII…………………………………………………………… 30
BIBLIOGRAFIE……………………………………………………….. 31
2
OBIECTIVE GENERALE
Obiectivul general al proiectului "Cercetări privind creşterea eficienţei
energetice a sistemelor de acţionare hidraulice, prin aplicarea tehnicilor
reglajului secundar" este “Creşterea competitivităţii CD prin stimularea
parteneriatelor în domeniile prioritare, concretizate în tehnologii, produse şi servicii
inovative pentru rezolvarea unor probleme complexe şi crearea mecanismelor de
implementare.”
Proiectul va stimula activitatea de C-D, desfaşurată în cadrul unui parteneriat
constituit în vederea acţionării într-un domeniu prioritar- domeniul energetic - în
scopul rezolvării unor probleme complexe legate de eficienţa energetică a sistemelor
de acţionare hidraulice.
Obiectivul derivat al proiectului este “Creşterea competenţei tehnologice şi
promovarea transferului de cunoştinţe şi tehnologii în domeniul energiei, în condiţii de
calitate, sigurantă în alimentare, cu respectarea principiului dezvoltării durabile.”
Proiectul urmareşte promovarea transferului de cunoştinţe, referitoare la
reglajul secundar al sistemelor de acţionare hidraulice, către beneficiarii şi fabricanţii
de maşini şi utilaje acţionate hidraulic sau către cei care implementează, în diverse
aplicaţii tehnice, sisteme hidraulice de acţionare.
Din lanţul energetic al consumatorilor industriali proiectul tratează problema
reducerii consumurilor energetice al instalaţiilor de acţionare hidraulice, pe baza:
promovarii reglajului secundar al transmisiilor hidraulice, ca principiu de baza
în concepţia realizării de noi instalaţii sau ca principiu de reabilitare a celor
existente, bazat pe reglarea automată a capacităţii maşinilor volumice din
secundar;
promovării reglajului primar al transmisiilor hidraulice, bazat pe reglarea
automată a capacităţii maşinilor volumice din primar;
promovării reglajului mixt al transmisiilor hidraulice, bazat pe reglarea automată
a capacităţii maşinilor volumice din primar şi secundar.
OBIECTIVELE FAZEI DE EXECUŢIE
Obiectivul etapei IV, " Execuţie şi testare dispozitiv de simulare sarcină pentru
motor volumic rotativ (MVR)", constă în execuţia şi testarea unui dispozitiv de
simulare sarcină variabilă pentru motoare hidraulice rotative de capacitate reglabilă.
Pentru realizarea obiectivului etapei s-au finalizat cele două activităţi menţionate
în planul de realizare al proiectului, şi anume:
Act. IV.1– Execuţie dispozitiv simulare sarcină pentru MVR, activitate realizată
de către partenerul P3: HIDRAULICA UM Plopeni;
Act. IV.2 – Testare dispozitiv simulare sarcină pentru MVR, activitate realizată
de către conducătorul de proiect CO: INOE 2000-IHP Bucureşti, partenerul P1:
UPB-CCEPM şi partenerul P2: INMA Bucureşti.
3
REZUMATUL FAZEI În vederea realizării obiectivului prezentei faze de execuţie a proiectului s-au finalizat
cele două activităţi, cuprinse în planul de realizare, care au permis execuţia şi testarea unui dispozitiv de simulare sarcină variabilă pentru motoare hidraulice rotative de capacitate reglabilă. Materialul este structurat pe cinci capitole, după cum urmează:
Cap.1. EXECUŢIA DISPOZITIVULUI DE SIMULARE A SARCINII PENTRU MOTOARE HIDRAULICE ROTATIVE (MVR), în care se prezintă structura unui dispozitiv de simulare sarcină variabilă pentru motoare hidraulice rotative de capacitate fixă sau reglabilă, executat de către partenerul P3: HIDRAULICA UM Plopeni.
Acest dispozitiv (executat conf. schemei hidraulice cod DSSq-SH) este integrat într-un stand probare debit mic (conf. schemei hidraulice cod SPDM-0-SH), care crează şi măsoară sarcina variabilă a motorului probat. Din dispozitivul de simulare a sarcinii variabile lipseşte servomotorul hidraulic cu electronică integrată, care a fost comandat la MOOG (SUA) şi urmează să sosească până la sfîrşitul anului.
Dispozitivul de simulare a sarcinii variabile este deplasabil şi se poate racorda hidraulic la un alt stand al IHP, care conţine o servopompă MOOG tip RKP-D. Cele două standuri, în funcţionare simultană, formează o transmisie hidraulică în care standul care conţine servopompa MOOG reprezintă primarul transmisiei, iar standul care conţine dispozitivul de simulare a sarcinii şi servomotorul MOOG reprezintă secundarul transmisiei. Pe cele două standuri, în funcţionare simultană, se pot testa SAH cu reglaj primar, SAH cu reglaj secundar şi SAH cu reglaj mixt.
Analiza comparativă a celor trei tipuri de reglaje ale SAH presupune cercetarea teoretică şi experimentelă mai întâi a celor două servomaşini hidraulice rotative şi apoi a SAH cu reglaj primar, secundar şi mixt.
Cap.2. CONSTRUCŢIA, FUNCŢIONAREA ŞI UTILIZAREA SERVOPOMPEI CU PISTOANE RADIALE MOOG TIP RKP-D, în care se prezintă principalele caracteristici ale servopompei, care o recomandă pentru o gamă largă de aplicaţii.
Cap.3. SIMULAREA NUMERICĂ ŞI TESTAREA SERVOMECANISMULUI HIDRAULIC DE REGLARE A CAPACITĂŢII POMPEI CU PISTOANE RADIALE MOOG TIP RKP-D, care demonstrează prin simulare numerică şi teste experimentale performanţele funcţionale ale servomecanismului de reglare a capacităţii pompei.
Cap.4. SIMULAREA NUMERICĂ A POMPEI MOOG TIP RKP-D, în care se prezintă un model complex de simulare în AMESim a funcţionării pompei cu 9 pistonaşe radiale. Prin rularea modelului de simulare se obţine caracteristica Q(t), care indică o mică neuniformitate a debitului la funcţionarea pompei în gol, ce se reduce odată cu creşterea sarcinii pompei.
Cap.5. TESTAREA POMPEI MOOG TIP RKP-D, în care se prezintă următoarele teste:
Testele preliminare, care au permis etalonarea traductorului de debit format dintr-o diafragmă şi două traductoare de presiune, mult mai sensibil la probe dinamice faţă de traductorul cu turbină, caracterizat de o masă inerţială.
Testele în regim staţionar, care au demonstrat o bună proporţionalitate între comandă şi debitul realizat, proporţionalitate caracterizată de un hxsterezis mai mic de 1%.
Testele în regim dinamic, ce au demonstrat un răspuns rapid al comenzii, la diferite semnale de excitaţie cu frecvenţă de max. 2,2 Hz, frecvenţă la care atenuarea semnalului este de 70%.
A fost creată o aplicaţie în mediul LABVIEW care, împreună cu interfaţa HMI a servopompei, permit de pe un PC: reglarea servopompei în buclă închisă de debit sau în buclă închisă de presiune; reglarea acceleraţiei/deceleraţiei semnalului de comandă; reglarea factorilor P, I, D ai regulatorului PID din blocul electronic al servopompei.
4
1. EXECUŢIA DISPOZITIVULUI DE SIMULARE A SARCINII PENTRU MOTOARE HIDRAULICE ROTATIVE (MVR) Dispozitivul de simulare a sarcinii pentru motoare volumice rotative permite
simularea unor sarcini variabile necesare testării motoarelor volumice fixe sau reglabile, in condiţii de laborator, apropiate de condiţiile de funcţionare pe instalaţiile de acţionare hidraulică a diverselor maşini şi utilaje. Dispozitivul este montat pe un modul de simulare a sarcinii (fig.1...fig.4), care a fost executat de către partenerul P3- HIDRAULICA UM Plopeni, după documentaţia de execuţie elaborată în cadrul etapei a III-a a proiectului, de către conducătorul de proiect INOE 2000-IHP Bucureşti.
Fig.1. Modul de simulare sarcină pentru MVR
Vedere frontală
Fig.2. Modul de simulare sarcină pentru
MVR-Vedere de ansamblu
Fig.3. Detaliu dispozitiv de simulare sarcină pentru MVR
Fig.4. Modul de simulare sarcină pentru
MVR-Vedere laterală stânga
Modulul de simulare a sarcinii pentru MVR, cu schema hidraulică de principiu cod DSSq-SH, cuprinde trei subansamble principale: aparatură hidraulică de reglare presiune şi debit, rezervor de ulei, dispozitiv de simulare sarcină pentru MVR. Aparatură hidraulică de reglare presiune şi debit este amplasată pe capacul rezervorului de ulei. Ea conţine o supapă de presiune proporţională Dn10, REXROTH, 4 supape de sens Dn16, un robinet cu sferă Dn 8, două robinete cu sferă Dn16, trei manometre, două traductoare de presiune. Rezervorul de ulei este prevăzut cu filtru de umplere şi aerisire şi semnalizator de ulei. Dispozitivul de simulare sarcină pentru MVR conţine un suport tip cadru închis, pe care sunt montate două maşini volumice rotative, o pompă şi un motor, cu arborii cuplaţi
5
mecanic. Pe cuplaje sunt montate un traductor de moment şi o roată cu 60 dinti egali, pentru traductorul de rotaţie. Funcţionarea dispozitivului de simulare a sarcinii pentru MVR Pe dispozitiv se montează motorul hidraulic rotativ care trebuie testat la sarcină variabilă. El poate fi de capacitate fixă sau de capacitate reglabilă, printr-un servomecanism hidraulic de reglare a poziţiei. Sarcina variabilă se realizează cu ajutorul supapei proporţionale, montată pe refularea pompei cuplată mecanic la motorul hidraulic. Pompa se alimentează din rezervor, prin puntea celor 4 supape de sens, iar motorul hidraulic dintr-un grup adiţional de pompare (schemă hidraulică cod SPDM-0-SH). Cu dispozitivul de simulare a sarcinii (schemă hidraulică cod DSSq-SH) şi grupul adiţional de pompare (schemă hidraulică cod SPDM-0-SH) se pot testa trei tipuri de sisteme de acţionare hidraulice (SAH), bazate pe reglarea automată a maşinilor volumice rotative, avantajoase d.p.d.v. energetic:
a) SAH cu reglaj în primar, în care pompa grupului adiţional de pompare este o pompă de capacitate reglabilă, cu servomecanism hidraulic de reglare a capacităţii, iar pe dispozitivul de simulare a sarcinii se montează un motor hidraulic rotativ de capacitate fixă;
b) SAH cu reglaj în secundar, în care pompa grupului adiţional de pompare este o pompă de capacitate fixă, iar pe dispozitivul de simulare a sarcinii se montează un motor hidraulic rotativ de capacitate reglabilă, cu servomecanism hidraulic de reglare a capacităţii;
c) SAH cu reglaj în secundar şi primar (reglaj mixt), în care pompa grupului adiţional de pompare este o pompă de capacitate reglabilă, cu servomecanism hidraulic de reglare a capacităţii, iar pe dispozitivul de simulare a sarcinii se montează un motor hidraulic rotativ de capacitate, deasemenea reglabilă, cu servomecanism hidraulic de reglare a capacităţii;
Un pas important în analiza celor trei tipuri de sisteme de acţionare hidraulice consta în analiza, teoretică şi experimentală, a maşinilor volumice rotative reglabile, pompe şi motoare, prevăzute cu servomecanisme hidraulice de reglare a capacităţii. În acest sens s-a analizat în prezenta etapă pompa volumică reglabilă cu pistoane radiale MOOG, tip RKP-D, prevăzută cu servomecanism hidraulic de reglare a poziţiei inelului de reglare. Pompa poate funcţiona în buclă de reglare automată a debitului sau a presiunii. Ea se va folosi la analiza SAH de tip „a” (motor fix) şi de tip „c”(motor reglabil). Pentru analiza sistemelor de acţionare hidraulice de tip „b” se va folosi un motor hidraulic rotativ tip MOOG, de capacitate reglabilă, prevăzut cu servomecanism hidraulic de reglare a capacităţii. Acelaşi motor se va utiliza şi la analiza SAH tip „c”. Pentru pompa cu pistoane radiale MOOG, tip RKP-D, s-au elaborat în AMESim două modele de simulare:
a) pentru funcţionarea servomecanismului de reglare a poziţiei inelului de reglare a capacităţii pompei;
b) pentru simularea funcţionării pompei cu pistoane radiale. Pompa MOOG, tip RKP-D, a fost testată în regim staţionar, dinamic şi de variaţie a parametrilor funcţionali.
2. CONSTRUCŢIA, FUNCŢIONAREA ŞI UTILIZAREA SERVOPOMPEI CU PISTOANE RADIALE MOOG TIP RKP-D
Pompele volumice sunt caracterizate de trecerea discontinuă a lichidului din racordul de aspiraţie în cel de refulare, prin camere de volum variabil constituite din elemente ale unui mecanism numite "elemente active". În faza de aspiraţie, camerele sunt conectate la racordul de aspiraţie, volumul lor creşte, iar presiunea scade până la valoarea necesară umplerii cu lichid. Când volumul camerelor devine maxim, acestea sunt închise mecanic şi apoi conectate la racordul de refulare.
6
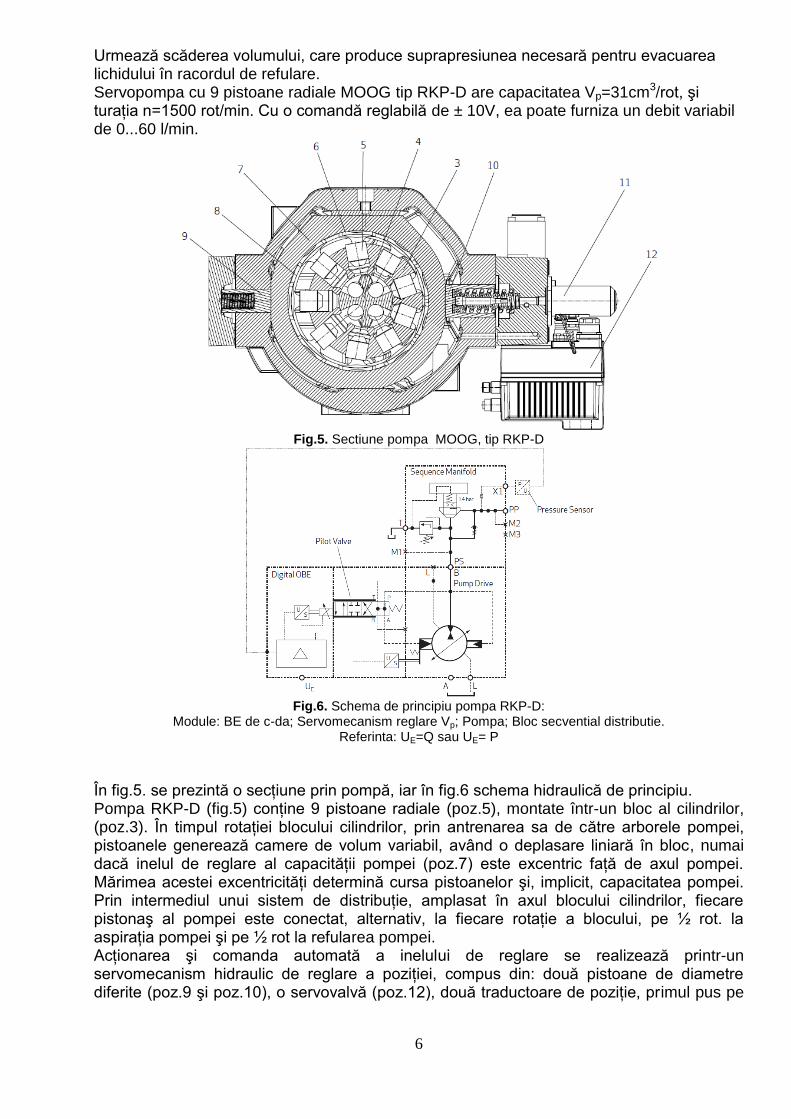
Urmează scăderea volumului, care produce suprapresiunea necesară pentru evacuarea lichidului în racordul de refulare. Servopompa cu 9 pistoane radiale MOOG tip RKP-D are capacitatea Vp=31cm3/rot, şi turaţia n=1500 rot/min. Cu o comandă reglabilă de ± 10V, ea poate furniza un debit variabil de 0...60 l/min.
Fig.5. Sectiune pompa MOOG, tip RKP-D
Fig.6. Schema de principiu pompa RKP-D:
Module: BE de c-da; Servomecanism reglare Vp; Pompa; Bloc secvential distributie. Referinta: UE=Q sau UE= P
În fig.5. se prezintă o secţiune prin pompă, iar în fig.6 schema hidraulică de principiu. Pompa RKP-D (fig.5) conţine 9 pistoane radiale (poz.5), montate într-un bloc al cilindrilor, (poz.3). În timpul rotaţiei blocului cilindrilor, prin antrenarea sa de către arborele pompei, pistoanele generează camere de volum variabil, având o deplasare liniară în bloc, numai dacă inelul de reglare al capacităţii pompei (poz.7) este excentric faţă de axul pompei. Mărimea acestei excentricităţi determină cursa pistoanelor şi, implicit, capacitatea pompei. Prin intermediul unui sistem de distribuţie, amplasat în axul blocului cilindrilor, fiecare pistonaş al pompei este conectat, alternativ, la fiecare rotaţie a blocului, pe ½ rot. la aspiraţia pompei şi pe ½ rot la refularea pompei. Acţionarea şi comanda automată a inelului de reglare se realizează printr-un servomecanism hidraulic de reglare a poziţiei, compus din: două pistoane de diametre diferite (poz.9 şi poz.10), o servovalvă (poz.12), două traductoare de poziţie, primul pus pe
7
inelul de reglare şi al doilea pe sertarul servovalvei, un traductor de presiune, amplasat pe refularea pompei şi un bloc electronic de comandă (poz.11). Structura modulară a servopompei RKP-D se poate observa în schema hidraulică de principiu (fig.6). Cele patru module ale servopompei sunt: blocul electronic de comandă, în care se prescrie mărimea reglată (respectiv debit sau presiune), intra semnalele de la traductoare (două de poziţie şi unul de presiune), care se compară cu mărimea prescrisă şi iese comanda la servovalvă; servomecanismul de reglare a capacităţii, format din servovalvă, două pistoane, inel de reglare, traductoare de poziţie şi presiune; pompa, cu cele nouă pistonaşe radiale, bloc cilindri, corp, ax de antrenare, lagăre, sistem de distribuţie pistonaşe, sisteme de etanşări, etc. blocul secvenţial de distribuţie, Sequence Manifold, format dintr-o supapă normal închisă pilotată, care nu permite scăderea presiunii pe refularea pompei sub valoarea presiunii de comandă a inelului de reglare (14bar). Servopompa funcţionează cu comandă în circuit închis, numerică sau analogică. Ea are un soft specializat, prin care se asigură un control digital al parametrilor sai de funcţionare, datorită unei interfeţe CANopen. Cunoscând bine pompa, prin cercetări experimentale, se poate interveni în MOOG CONFIGURATION SOFTWARE pentru a modifica valorile parametrilor predefiniţi de fabrică, funcţie de parametrii instalaţiei de acţionare hidraulică în care urmează a se monta. Această servopompă, care poate funcţiona în buclă închisă de debit sau în buclă închisă de presiune, prezinta mari avantaje energetice şi se poate utiliza în toate cele trei tipuri de sisteme de acţionare hidraulice bazate pe reglarea automată a capacităţii maşinilor volumice rotative: a) Pentru SAH cu reglaj primar, se poate utiliza servopompa MOOG tip RKP-D cu reglaj în buclă de debit (UE= Q) în primar şi un motor hidraulic rotativ de capacitate constantă în secundar; b) Pentru SAH cu reglaj secundar, se poate utiliza servopompa MOOG tip RKP-D cu reglaj în buclă de presiune (UE= P) în primar şi un servomotor hidraulic rotativ (de capacitate reglabilă) în secundar; c) Pentru SAH cu reglaj mixt, se poate utiliza servopompa MOOG RKP-D cu reglaj în buclă de debit (UE= Q) în primar şi un servomotor hidraulic rotativ (de capacitate reglabilă) în secundar. Importanţa servopompei MOOG tip RKP-D pentru sistemele de acţionare hidraulice este dată de performanţele sale funcţionale şi energetice. Utilizată în SAH ea îşi va acorda permanent capacitatea funcţie de cerinţele variabile în timp ale consumatorilor, cu consumuri energetice minime. Se impune deci o analiză de detaliu a acesteia, care să conţină: simularea şi testarea comportării dinamice a servomecanismului hidraulic de reglare a capacităţii pompei; simularea funcţionării pompei; testarea sa în regim staţionar şi dinamic, acordarea parametrilor funcţionali ai pompei MOOG tip RKP-D.
3. SIMULAREA NUMERICĂ ŞI TESTAREA SERVOMECANISMULUI HIDRAULIC DE REGLARE A CAPACITĂŢII POMPEI CU PISTOANE RADIALE MOOG TIP RKP-D
Simularea modului de funcţionare a sistemelor sau subsistemelor reprezintă un aspect important în studiul acestora. Obţinerea unor modele matematice cât mai apropiate de fenomenele fizice ce se doresc reproduse sau îmbunătăţite ne ajută în luarea deciziilor privind modul de optimizare a acestora. D.p.d.v. al teoriei sistemelor automate servomecanismul de reglare a capacităţii pompei cu pistoane radiale MOOG tip RKP-D este un servomecanism hidraulic de reglare cu reacţie de poziţie.
8
3.1. Modelul de simulare în AMESim a servomecanismului hidraulic de reglare cu reacţie de poziţie
Sistemele de reglare electrohidraulice sunt sisteme complexe, în cadrul lor intervenind atât fenomene asociate curgerii lichidelor din domeniul transmisiilor hidraulice volumice cât şi fenomene specifice proceselor de reglare automată. Datorită complexităţii acestor fenomene stabilirea soluţiilor optime în proiectarea şi realizarea acestora se face iterativ. Satisfacerea performanţelor impuse implică utilizarea procedeelor de modelare matematică si simulare numerică a acestor sisteme. Pentru determinarea parametrilor constructivi trebuiesc rezolvate sistemele de ecuaţii diferenţiale ce descriu comportarea dinamică a sistemelor respective. Aceste sisteme sunt de regulă neliniare, iar rezolvarea lor se face apelând la sisteme de calcul numerice. Datorită diferentelor dintre modul de funcţionare real şi simulat al acestor sisteme sunt necesare mai multe iteratii pentru stabilirea parametrilor acestora.
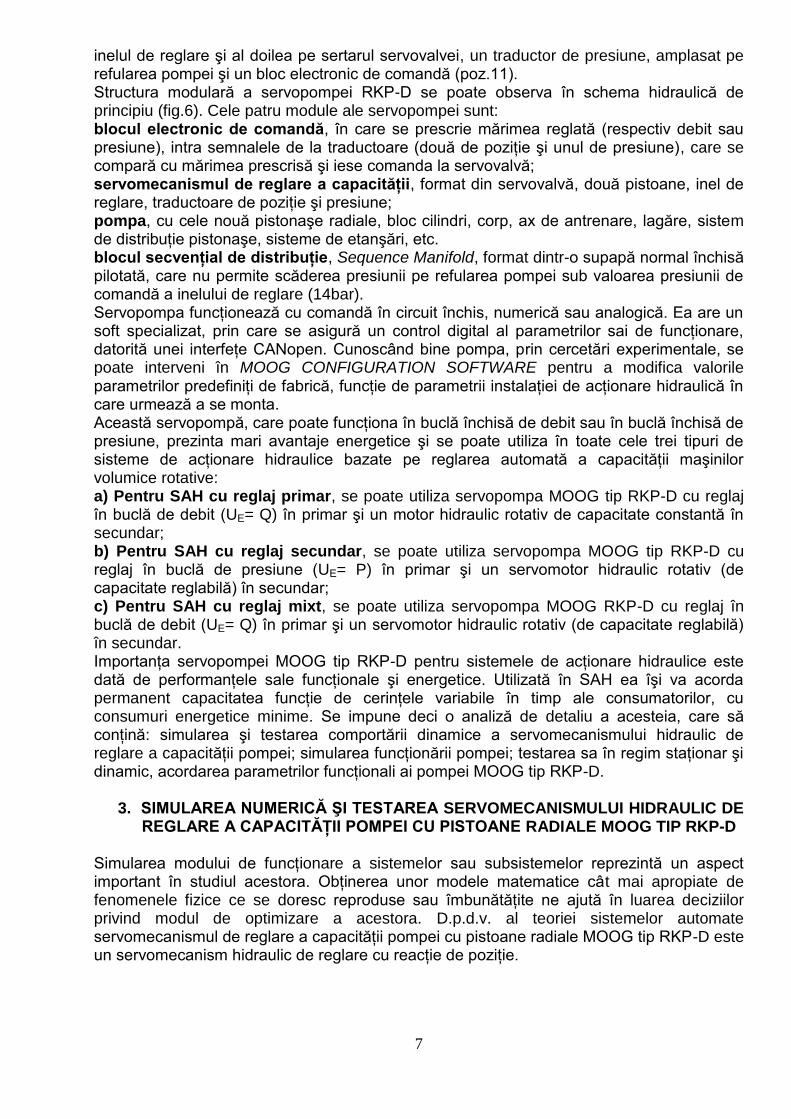
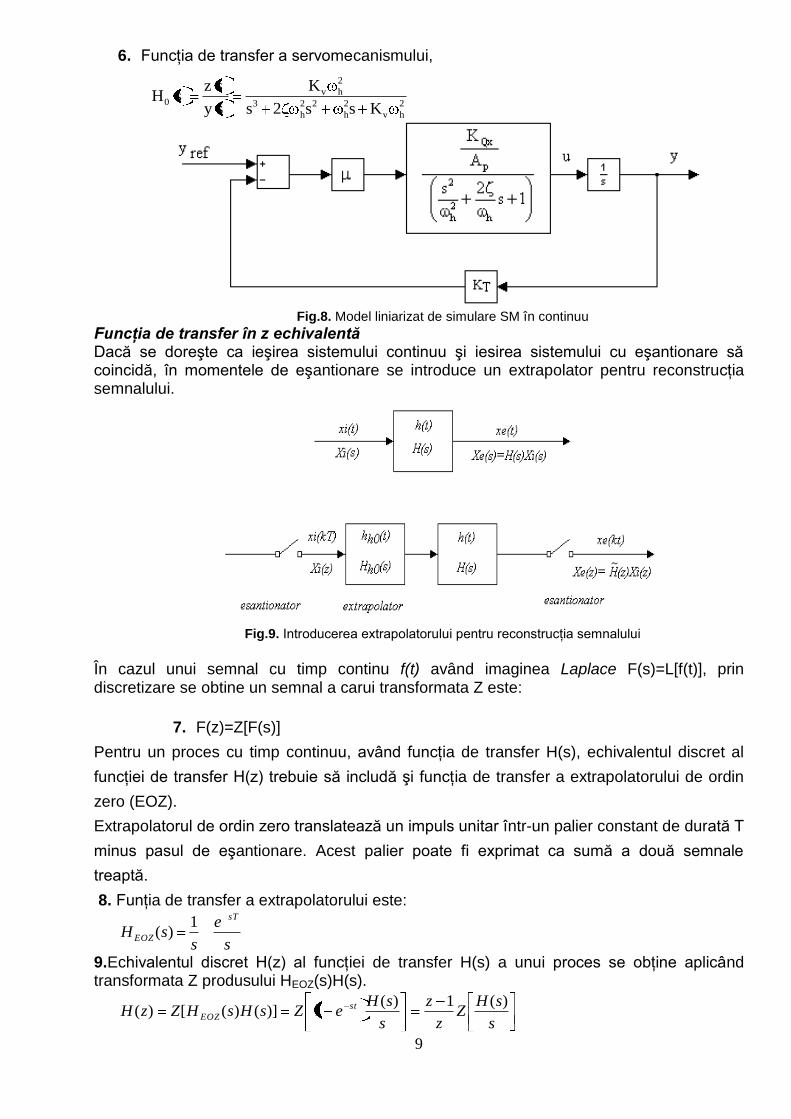
3.1.1. Simularea modelelor matematice liniare Pentru un servomecanism electrohidraulic cu reacţie de poziţie (fig.7) avem schema:
Fig.7. Servomecanism electrohidraulic cu reacţie de poziţie
1. Funcţia de transfer,
12
2 sA
mKs
R
ms
A
K
s
sz
p
P
h
p
Qx
2. Pulsaţia naturală hidraulică,
m
R hh
3. Factorul de amortizare,
h2
p
P mRA2
K
4. Factorul de amplificare în viteză,
p
Qx
vA
KK
5. Funcţia de transfer a căii directe,
1s2s
s
K
zy
zsH
h
2
h
2
v
9
6. Funcţia de transfer a servomecanismului,
2
hv
2
h
22
h
3
2
hv0
Kss2s
K
sy
szsH
Fig.8. Model liniarizat de simulare SM în continuu
Funcţia de transfer în z echivalentă Dacă se doreşte ca ieşirea sistemului continuu şi iesirea sistemului cu eşantionare să coincidă, în momentele de eşantionare se introduce un extrapolator pentru reconstrucţia semnalului.
Fig.9. Introducerea extrapolatorului pentru reconstrucţia semnalului
În cazul unui semnal cu timp continu f(t) având imaginea Laplace F(s)=L[f(t)], prin discretizare se obtine un semnal a carui transformata Z este:
7. F(z)=Z[F(s)]
Pentru un proces cu timp continuu, având funcţia de transfer H(s), echivalentul discret al
funcţiei de transfer H(z) trebuie să includă şi funcţia de transfer a extrapolatorului de ordin
zero (EOZ).
Extrapolatorul de ordin zero translatează un impuls unitar într-un palier constant de durată T
minus pasul de eşantionare. Acest palier poate fi exprimat ca sumă a două semnale
treaptă.
8. Funţia de transfer a extrapolatorului este:
s
e
ssH
sT
EOZ
1)(
9.Echivalentul discret H(z) al funcţiei de transfer H(s) a unui proces se obţine aplicând transformata Z produsului HEOZ(s)H(s).
s
sHZ
z
z
s
sHeZsHsHZzH st
EOZ
)(1)(1)]()([)(
10
Calculul funcţiei de transfer H(z) din H(s) conform s
sHZ
z
zzH
)(1)( se poate face
analitic prin reziduuri sau se pot utiliza funcţiile c2d sau c2dm (continuous- to discrete-time models) din Matlab. Folosirea extrapolatorului de ordin zero produce o întirziere cu un timp mort egal cu jumatate din perioada de eşantionare. 10. Funcţia de transfer devine:
2
2 ...2/)(111)(
eeT
s
eee
sT
eTs
sTsT
s
esH
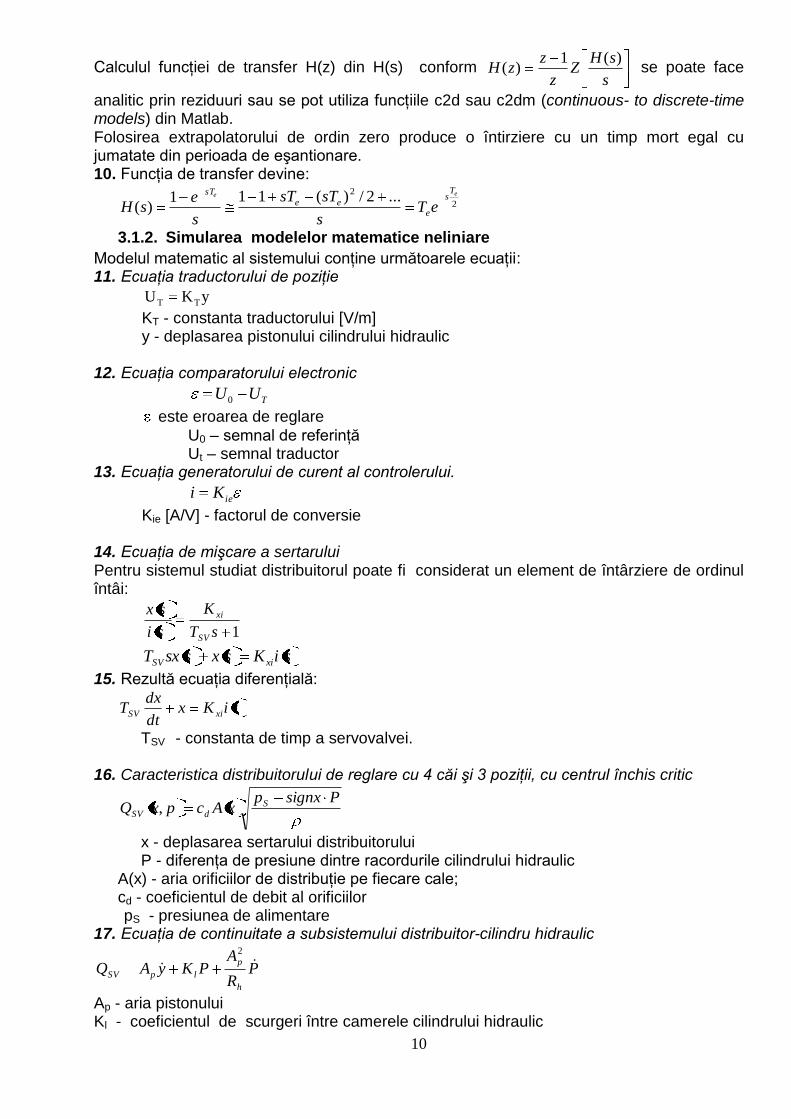
3.1.2. Simularea modelelor matematice neliniare
Modelul matematic al sistemului conţine următoarele ecuaţii: 11. Ecuaţia traductorului de poziţie
yKU TT
KT - constanta traductorului [V/m] y - deplasarea pistonului cilindrului hidraulic
12. Ecuaţia comparatorului electronic
TUU0
este eroarea de reglare
U0 – semnal de referinţă Ut – semnal traductor
13. Ecuaţia generatorului de curent al controlerului.
ieKi
Kie [A/V] - factorul de conversie
14. Ecuaţia de mişcare a sertarului Pentru sistemul studiat distribuitorul poate fi considerat un element de întârziere de ordinul întâi:
1sT
K
si
sx
SV
xi
siKsxssxT xiSV
15. Rezultă ecuaţia diferenţială:
tiKxdt
dxT xiSV
TSV - constanta de timp a servovalvei.
16. Caracteristica distribuitorului de reglare cu 4 căi şi 3 poziţii, cu centrul închis critic
PsignxpxAcpxQ S
dSV ,
x - deplasarea sertarului distribuitorului P - diferenţa de presiune dintre racordurile cilindrului hidraulic A(x) - aria orificiilor de distribuţie pe fiecare cale; cd - coeficientul de debit al orificiilor pS - presiunea de alimentare
17. Ecuaţia de continuitate a subsistemului distribuitor-cilindru hidraulic
PR
APKyAQ
h
p
lpSV
2
Ap - aria pistonului Kl - coeficientul de scurgeri între camerele cilindrului hidraulic
11
Rh - rigiditatea hidraulică a motorului hidraulic 18. Ecuaţia de mişcare a pistonului cilindrului hidraulic
19. Fp - forţa de presiune PAF pp
20. Fa amortizor vKF fa
21. Fe - forţa elastică eee yyKF 02
22. Ff - forţa de frecare
feapc FFFFym
23. Rigiditatea hidraulica Rigiditatea hidraulica este o marime cu o importanţă deosebită în studiul dinamicii sistemelor de acţionare hidraulice şi pneumatice. Importanţa acestei mărimi este dată de influenţa directă pe care o are asupra pulsaţiei naturale şi a factorului de amortizare ale sistemelor menţionate. Prin definiţie, „rigiditatea hidraulică” a lichidului dintr-un cilindru hidraulic cu simplu efect este raportul:
2
h p
FR A
z V
În cazul unui cilindru hidraulic cu dublu efect şi tijă bilaterală, cele două coloane cilindrice de lichid pot fi asimilate cu două resoarte ale căror rigidităţi se calculează cu relaţia de mai sus:
2
h1 p
1
R AV
2
h2 p
2
R AV
În studiul stabilităţii unui servomecanism ale cărui oscilaţii se produc în jurul poziţiei neutre a pistonului, rigiditatea hidraulică poate fi considerată practic constantă. Pentru analiza comportarii statice si dinamice a sistemului de reglare a capacitatii pompei RKP sa utilizat mediul de programare grafica AMESIM-Imagine. Pentru trasarea modelelor de simulare s-au utilizat simboluri standardizate, specifice elementelor de acţionare hidraulică, existente în bibliotecile programului. O altă caracteristică importanţă a programului constă în alegerea automată a metodei de integrare a sistemelor de ecuaţii care poate fi adaptată pe parcursul simulării în funcţie de caracteristicile ecuaţiilor. Din punctul de vedere al utilizatorilor, programul constituie o interfaţă grafică sugestivă ce afişază evoluţia întregului sistem pe parcursul procesului de simulare. În AMESim schemele sistemelor tehnice se construiesc introducând simboluri sau pictograme sugestive (de obicei simbolurile ISO ale componentelor utilizate) preluate din biblioteci în suprafaţa activă de modelare. Procesul de simulare ce urmează după elaborarea schemei conţine următoarele etape:
alegerea modelelor matematice pentru fiecare componetă utilizată;
definirea parametrilor componentelor;
executarea integrării numerice;
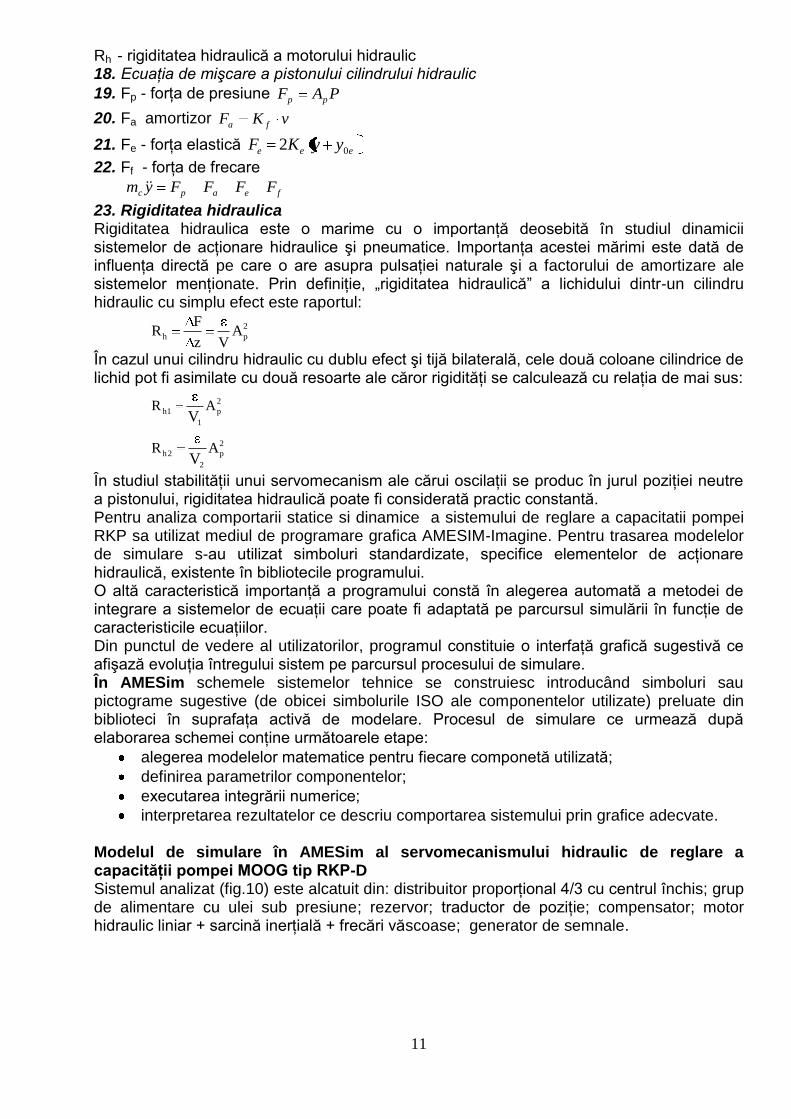
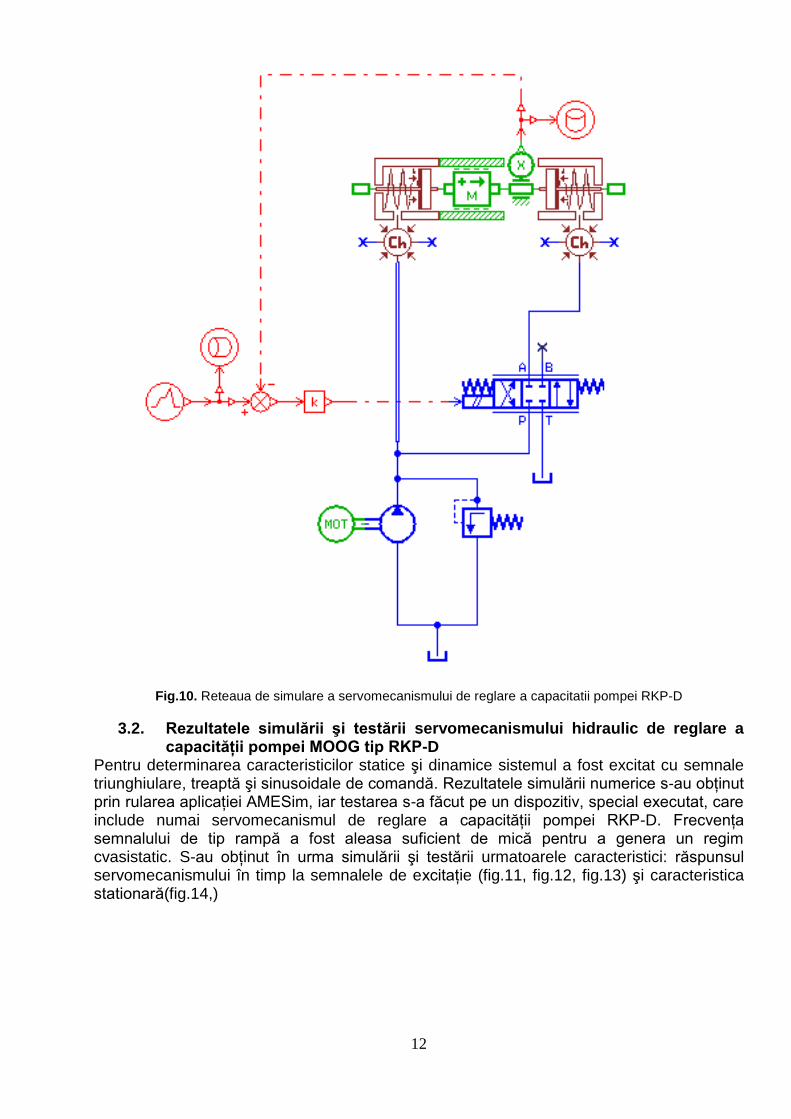
interpretarea rezultatelor ce descriu comportarea sistemului prin grafice adecvate. Modelul de simulare în AMESim al servomecanismului hidraulic de reglare a capacităţii pompei MOOG tip RKP-D Sistemul analizat (fig.10) este alcatuit din: distribuitor proporţional 4/3 cu centrul închis; grup de alimentare cu ulei sub presiune; rezervor; traductor de poziţie; compensator; motor hidraulic liniar + sarcină inerţială + frecări văscoase; generator de semnale.
12
Fig.10. Reteaua de simulare a servomecanismului de reglare a capacitatii pompei RKP-D
3.2. Rezultatele simulării şi testării servomecanismului hidraulic de reglare a capacităţii pompei MOOG tip RKP-D
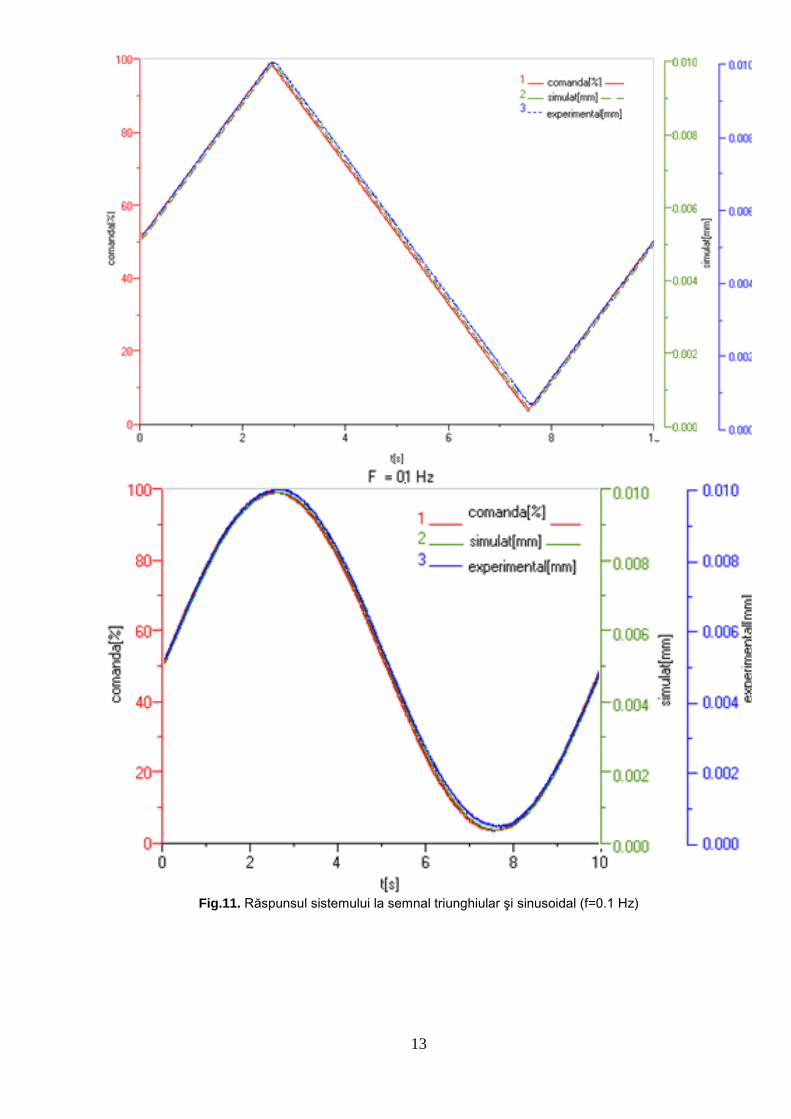
Pentru determinarea caracteristicilor statice şi dinamice sistemul a fost excitat cu semnale triunghiulare, treaptă şi sinusoidale de comandă. Rezultatele simulării numerice s-au obţinut prin rularea aplicaţiei AMESim, iar testarea s-a făcut pe un dispozitiv, special executat, care include numai servomecanismul de reglare a capacităţii pompei RKP-D. Frecvenţa semnalului de tip rampă a fost aleasa suficient de mică pentru a genera un regim cvasistatic. S-au obţinut în urma simulării şi testării urmatoarele caracteristici: răspunsul servomecanismului în timp la semnalele de excitaţie (fig.11, fig.12, fig.13) şi caracteristica stationară(fig.14,)
13
Fig.11. Răspunsul sistemului la semnal triunghiular şi sinusoidal (f=0.1 Hz)
14
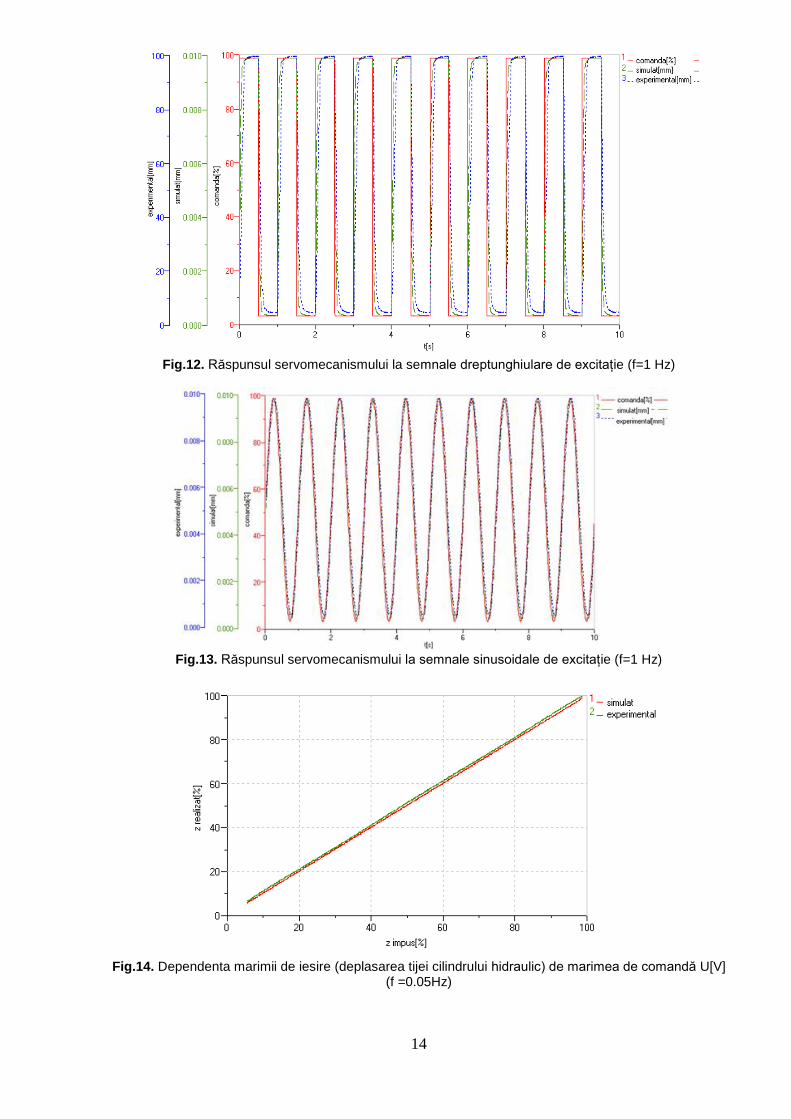
Fig.12. Răspunsul servomecanismului la semnale dreptunghiulare de excitaţie (f=1 Hz)
Fig.13. Răspunsul servomecanismului la semnale sinusoidale de excitaţie (f=1 Hz)
Fig.14. Dependenta marimii de iesire (deplasarea tijei cilindrului hidraulic) de marimea de comandă U[V]
(f =0.05Hz)
15
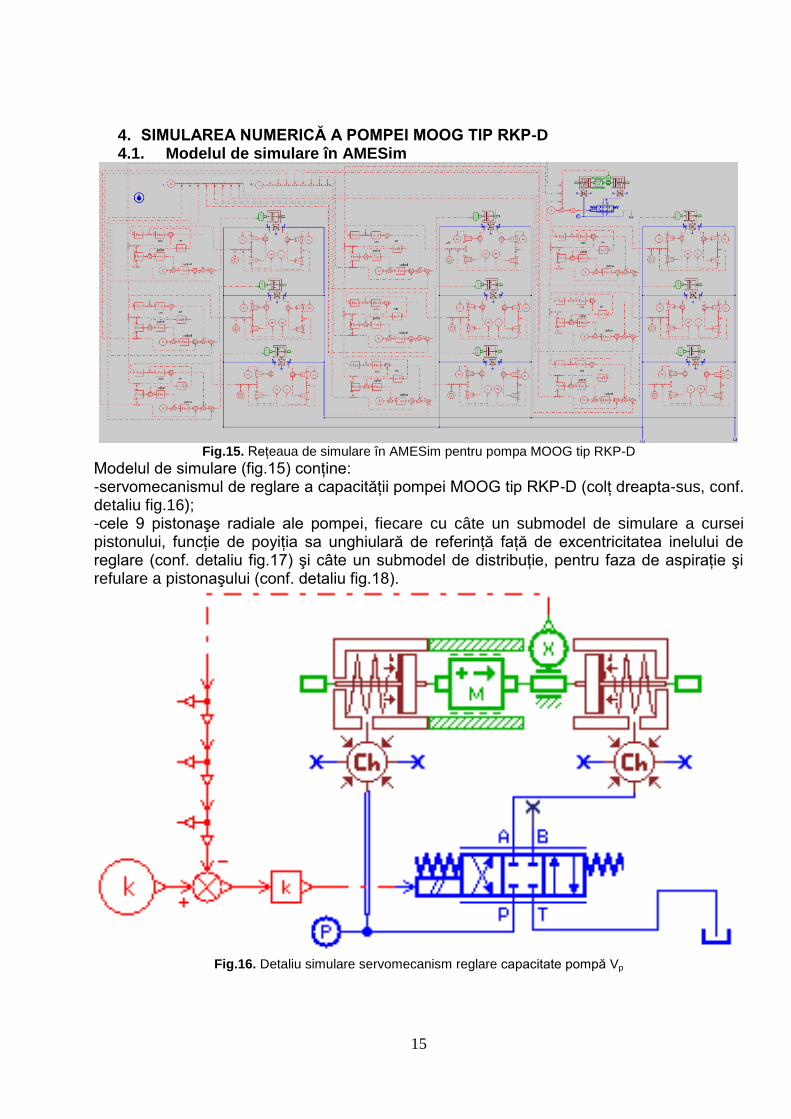
4. SIMULAREA NUMERICĂ A POMPEI MOOG TIP RKP-D 4.1. Modelul de simulare în AMESim
Fig.15. Reţeaua de simulare în AMESim pentru pompa MOOG tip RKP-D
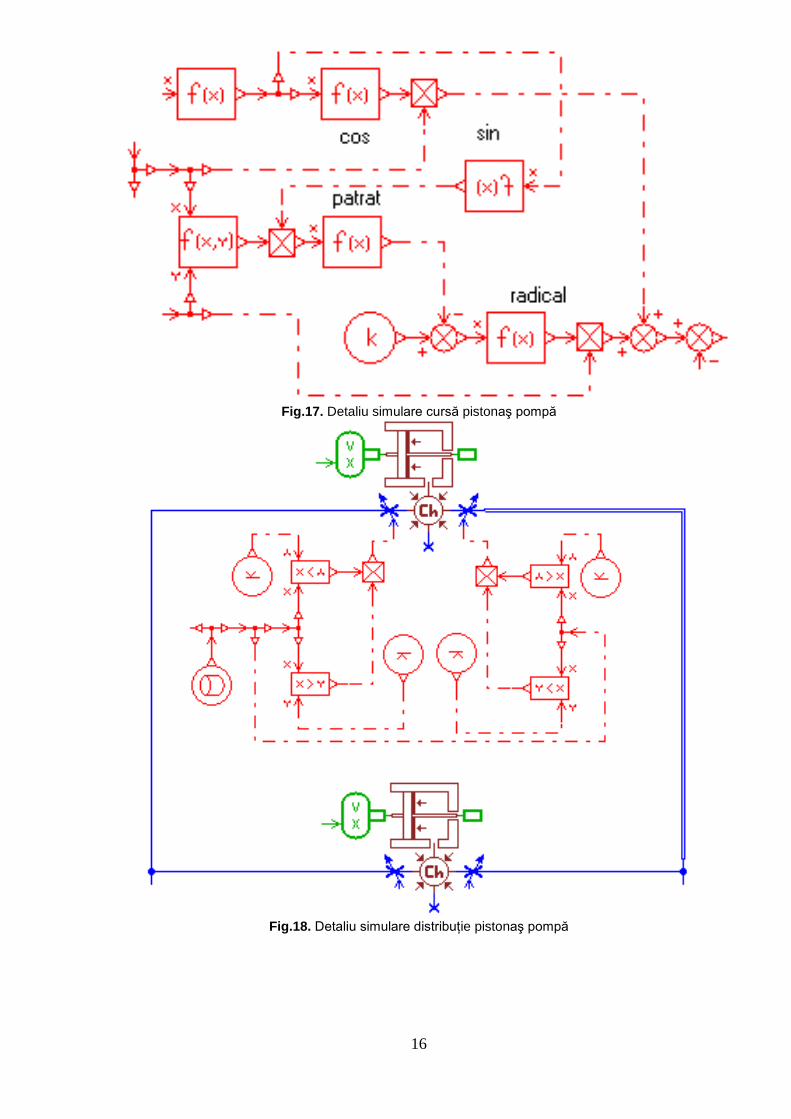
Modelul de simulare (fig.15) conţine: -servomecanismul de reglare a capacităţii pompei MOOG tip RKP-D (colţ dreapta-sus, conf. detaliu fig.16); -cele 9 pistonaşe radiale ale pompei, fiecare cu câte un submodel de simulare a cursei pistonului, funcţie de poyiţia sa unghiulară de referinţă faţă de excentricitatea inelului de reglare (conf. detaliu fig.17) şi câte un submodel de distribuţie, pentru faza de aspiraţie şi refulare a pistonaşului (conf. detaliu fig.18).
Fig.16. Detaliu simulare servomecanism reglare capacitate pompă Vp
16
Fig.17. Detaliu simulare cursă pistonaş pompă
Fig.18. Detaliu simulare distribuţie pistonaş pompă
17
4.2. Rezultatele rulării modelului de simulare în AMESim
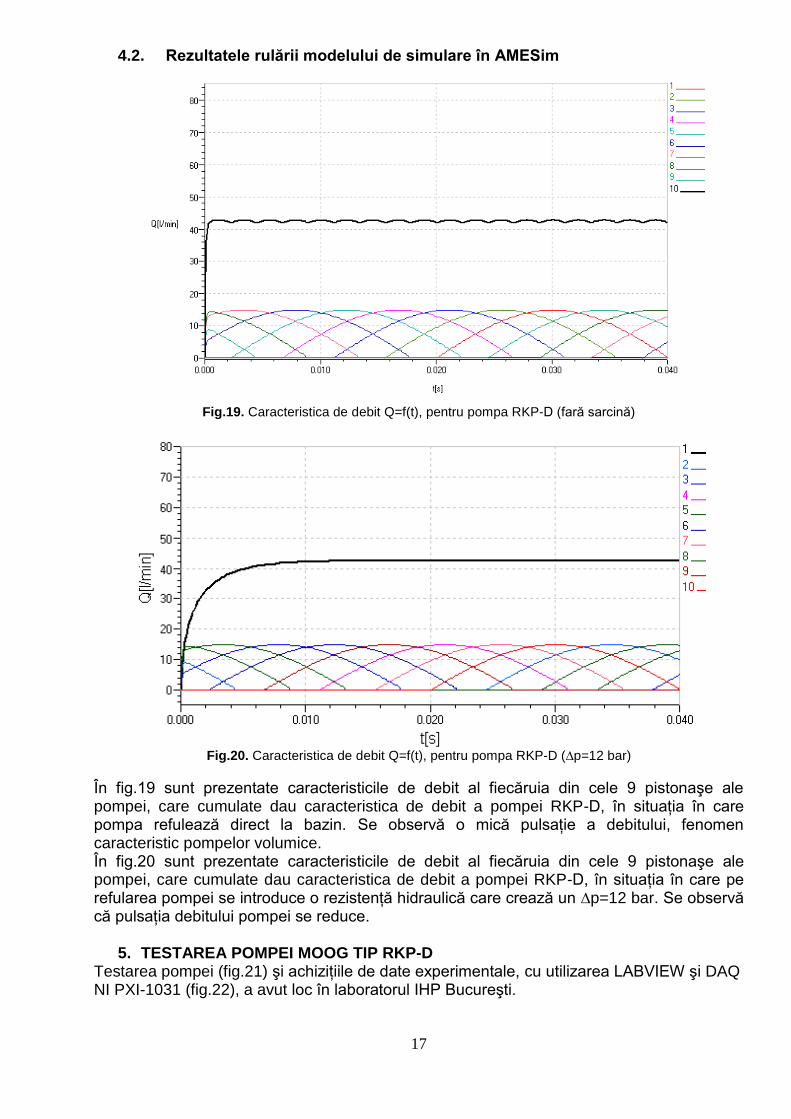
Fig.19. Caracteristica de debit Q=f(t), pentru pompa RKP-D (fară sarcină)
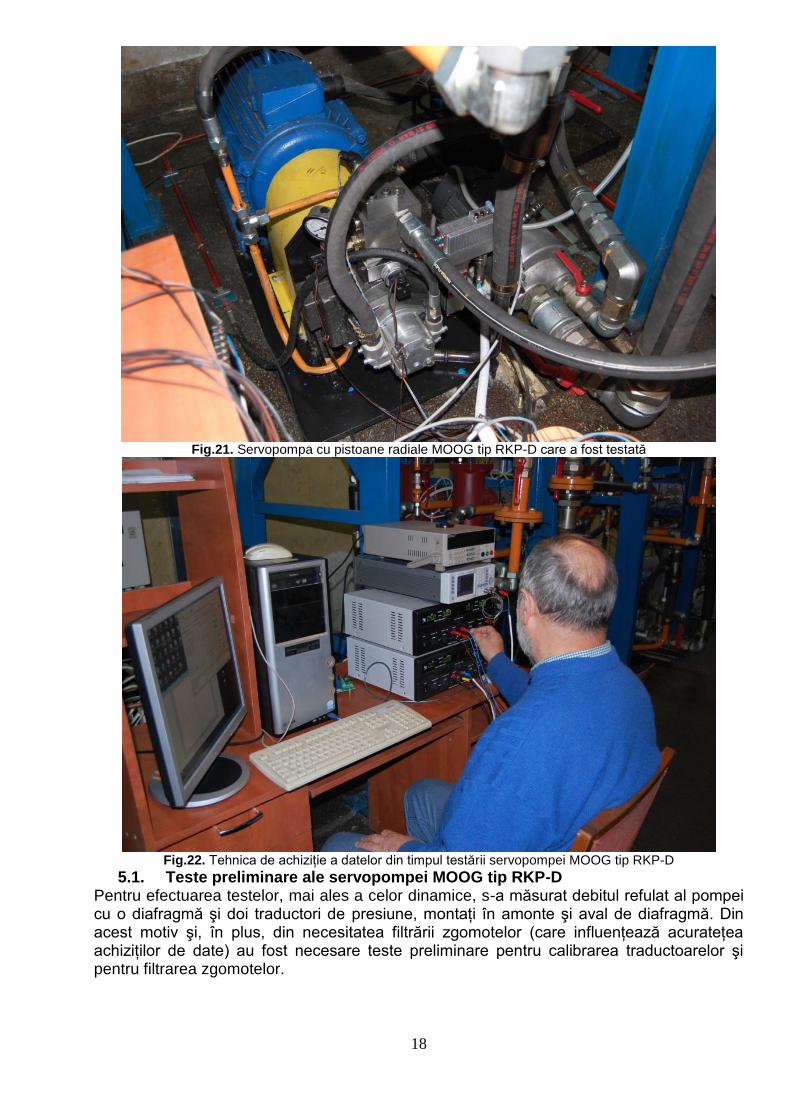
Fig.20. Caracteristica de debit Q=f(t), pentru pompa RKP-D (∆p=12 bar)
În fig.19 sunt prezentate caracteristicile de debit al fiecăruia din cele 9 pistonaşe ale pompei, care cumulate dau caracteristica de debit a pompei RKP-D, în situaţia în care pompa refulează direct la bazin. Se observă o mică pulsaţie a debitului, fenomen caracteristic pompelor volumice. În fig.20 sunt prezentate caracteristicile de debit al fiecăruia din cele 9 pistonaşe ale pompei, care cumulate dau caracteristica de debit a pompei RKP-D, în situaţia în care pe refularea pompei se introduce o rezistenţă hidraulică care crează un ∆p=12 bar. Se observă că pulsaţia debitului pompei se reduce.
5. TESTAREA POMPEI MOOG TIP RKP-D Testarea pompei (fig.21) şi achiziţiile de date experimentale, cu utilizarea LABVIEW şi DAQ NI PXI-1031 (fig.22), a avut loc în laboratorul IHP Bucureşti.
18
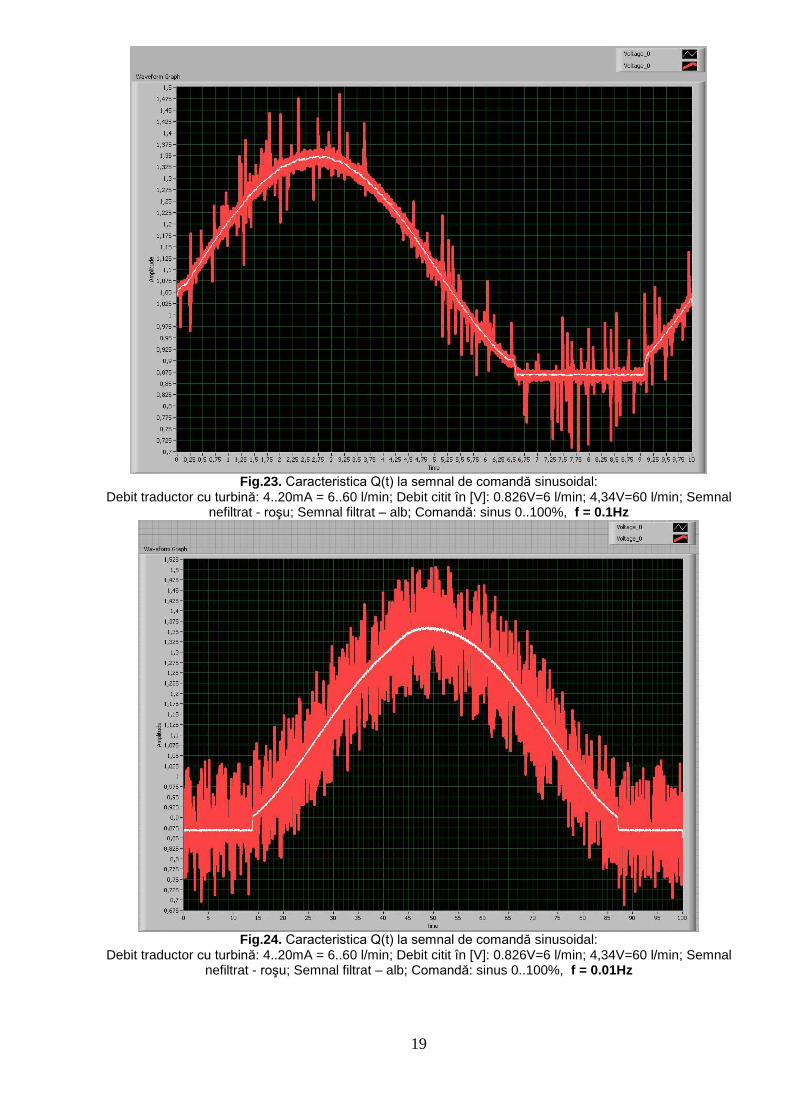
Fig.21. Servopompa cu pistoane radiale MOOG tip RKP-D care a fost testată
Fig.22. Tehnica de achiziţie a datelor din timpul testării servopompei MOOG tip RKP-D
5.1. Teste preliminare ale servopompei MOOG tip RKP-D Pentru efectuarea testelor, mai ales a celor dinamice, s-a măsurat debitul refulat al pompei cu o diafragmă şi doi traductori de presiune, montaţi în amonte şi aval de diafragmă. Din acest motiv şi, în plus, din necesitatea filtrării zgomotelor (care influenţează acurateţea achiziţilor de date) au fost necesare teste preliminare pentru calibrarea traductoarelor şi pentru filtrarea zgomotelor.
19
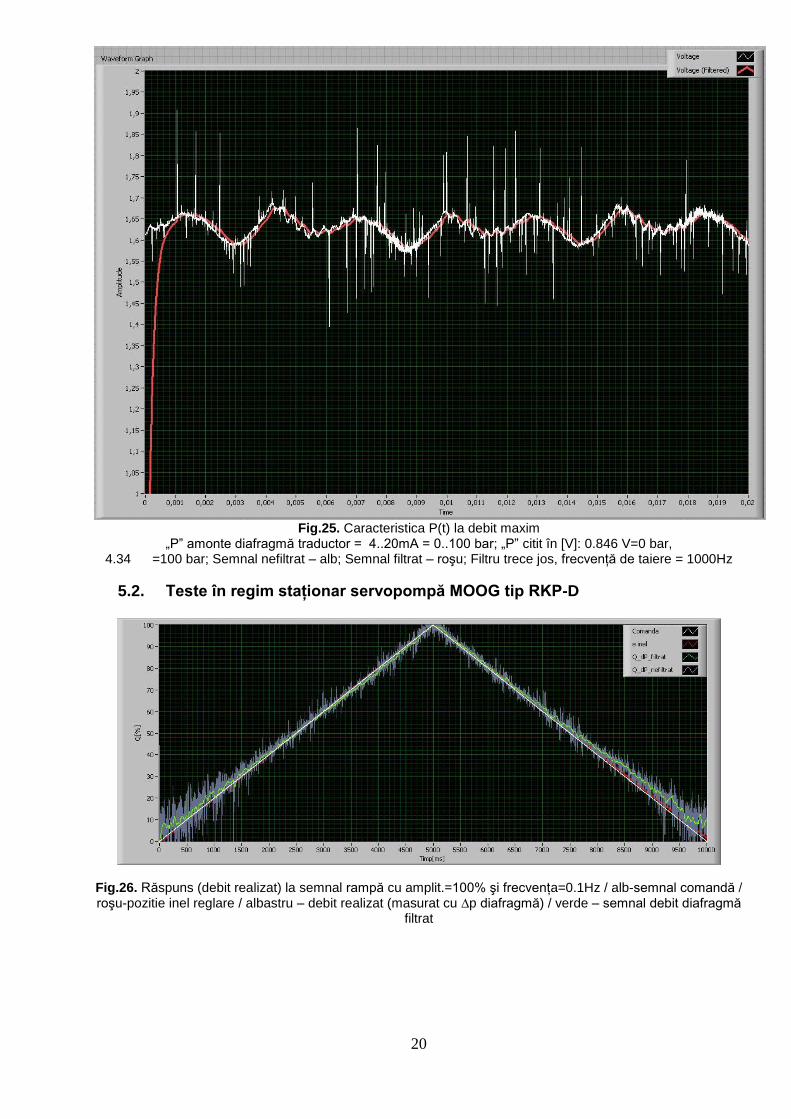
Fig.23. Caracteristica Q(t) la semnal de comandă sinusoidal:
Debit traductor cu turbină: 4..20mA = 6..60 l/min; Debit citit în [V]: 0.826V=6 l/min; 4,34V=60 l/min; Semnal nefiltrat - roşu; Semnal filtrat – alb; Comandă: sinus 0..100%, f = 0.1Hz
Fig.24. Caracteristica Q(t) la semnal de comandă sinusoidal:
Debit traductor cu turbină: 4..20mA = 6..60 l/min; Debit citit în [V]: 0.826V=6 l/min; 4,34V=60 l/min; Semnal nefiltrat - roşu; Semnal filtrat – alb; Comandă: sinus 0..100%, f = 0.01Hz
20
Fig.25. Caracteristica P(t) la debit maxim
„P” amonte diafragmă traductor = 4..20mA = 0..100 bar; „P” citit în [V]: 0.846 V=0 bar, 4.34 =100 bar; Semnal nefiltrat – alb; Semnal filtrat – roşu; Filtru trece jos, frecvenţă de taiere = 1000Hz
5.2. Teste în regim staţionar servopompă MOOG tip RKP-D
Fig.26. Răspuns (debit realizat) la semnal rampă cu amplit.=100% şi frecvenţa=0.1Hz / alb-semnal comandă / roşu-pozitie inel reglare / albastru – debit realizat (masurat cu ∆p diafragmă) / verde – semnal debit diafragmă
filtrat
21
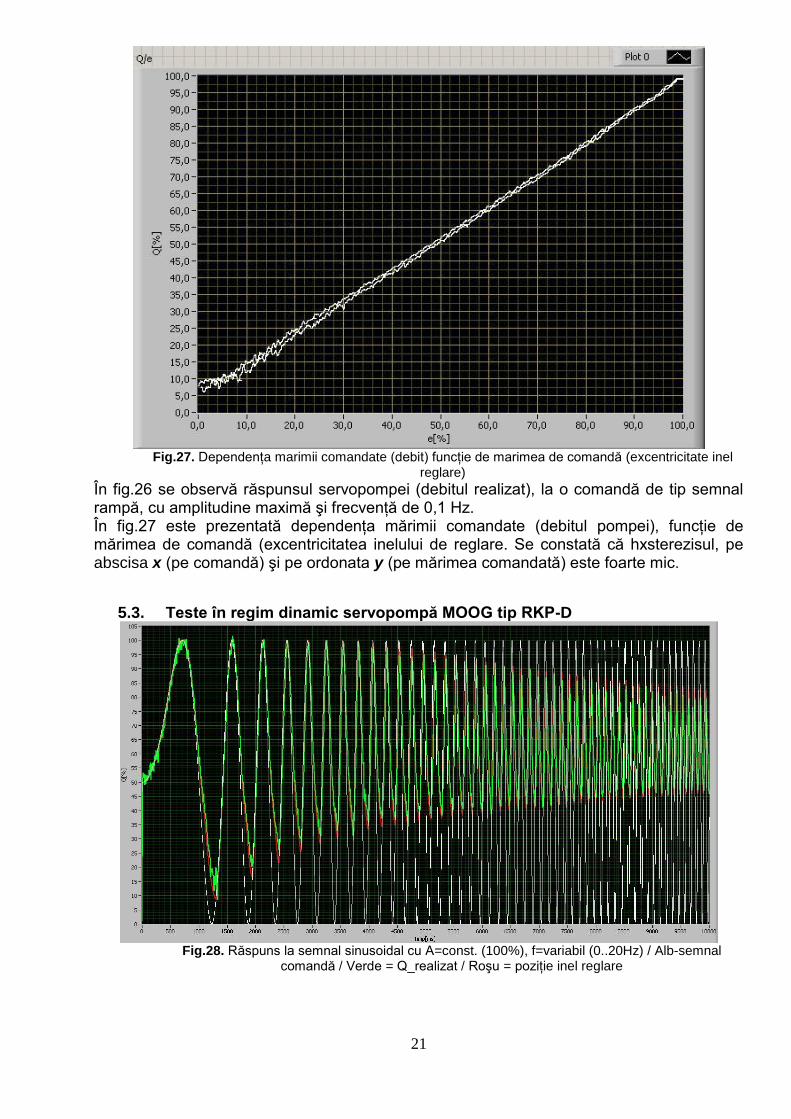
Fig.27. Dependenţa marimii comandate (debit) funcţie de marimea de comandă (excentricitate inel
reglare)
În fig.26 se observă răspunsul servopompei (debitul realizat), la o comandă de tip semnal rampă, cu amplitudine maximă şi frecvenţă de 0,1 Hz. În fig.27 este prezentată dependenţa mărimii comandate (debitul pompei), funcţie de mărimea de comandă (excentricitatea inelului de reglare. Se constată că hxsterezisul, pe abscisa x (pe comandă) şi pe ordonata y (pe mărimea comandată) este foarte mic.
5.3. Teste în regim dinamic servopompă MOOG tip RKP-D
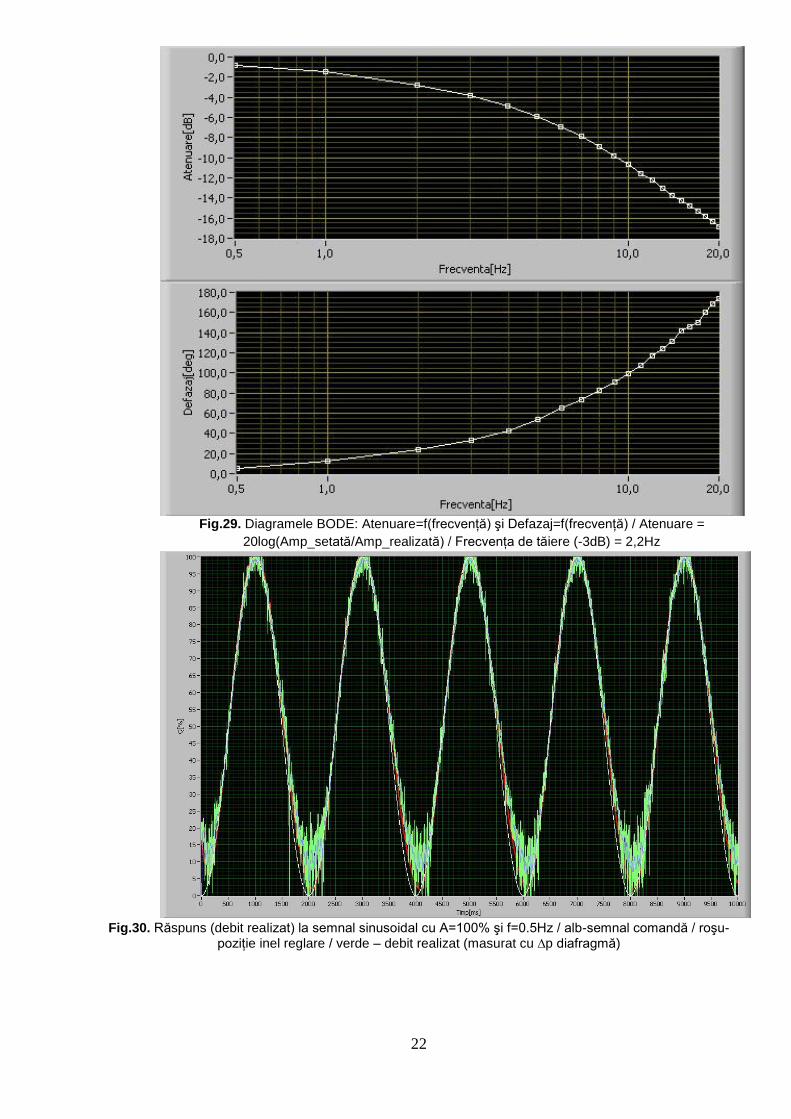
Fig.28. Răspuns la semnal sinusoidal cu A=const. (100%), f=variabil (0..20Hz) / Alb-semnal
comandă / Verde = Q_realizat / Roşu = poziţie inel reglare
22
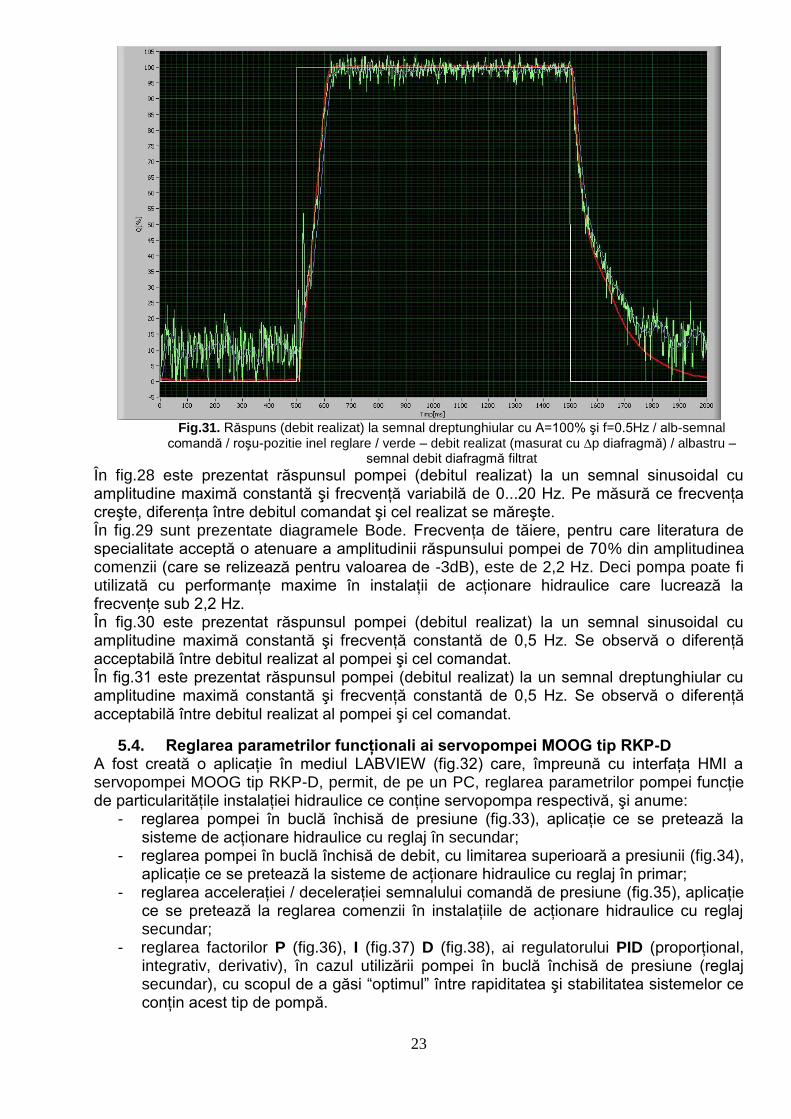
Fig.29. Diagramele BODE: Atenuare=f(frecvenţă) şi Defazaj=f(frecvenţă) / Atenuare =
20log(Amp_setată/Amp_realizată) / Frecvenţa de tăiere (-3dB) = 2,2Hz
Fig.30. Răspuns (debit realizat) la semnal sinusoidal cu A=100% şi f=0.5Hz / alb-semnal comandă / roşu-
poziţie inel reglare / verde – debit realizat (masurat cu ∆p diafragmă)
23
Fig.31. Răspuns (debit realizat) la semnal dreptunghiular cu A=100% şi f=0.5Hz / alb-semnal
comandă / roşu-pozitie inel reglare / verde – debit realizat (masurat cu ∆p diafragmă) / albastru – semnal debit diafragmă filtrat
În fig.28 este prezentat răspunsul pompei (debitul realizat) la un semnal sinusoidal cu amplitudine maximă constantă şi frecvenţă variabilă de 0...20 Hz. Pe măsură ce frecvenţa creşte, diferenţa între debitul comandat şi cel realizat se măreşte. În fig.29 sunt prezentate diagramele Bode. Frecvenţa de tăiere, pentru care literatura de specialitate acceptă o atenuare a amplitudinii răspunsului pompei de 70% din amplitudinea comenzii (care se relizează pentru valoarea de -3dB), este de 2,2 Hz. Deci pompa poate fi utilizată cu performanţe maxime în instalaţii de acţionare hidraulice care lucrează la frecvenţe sub 2,2 Hz. În fig.30 este prezentat răspunsul pompei (debitul realizat) la un semnal sinusoidal cu amplitudine maximă constantă şi frecvenţă constantă de 0,5 Hz. Se observă o diferenţă acceptabilă între debitul realizat al pompei şi cel comandat. În fig.31 este prezentat răspunsul pompei (debitul realizat) la un semnal dreptunghiular cu amplitudine maximă constantă şi frecvenţă constantă de 0,5 Hz. Se observă o diferenţă acceptabilă între debitul realizat al pompei şi cel comandat.
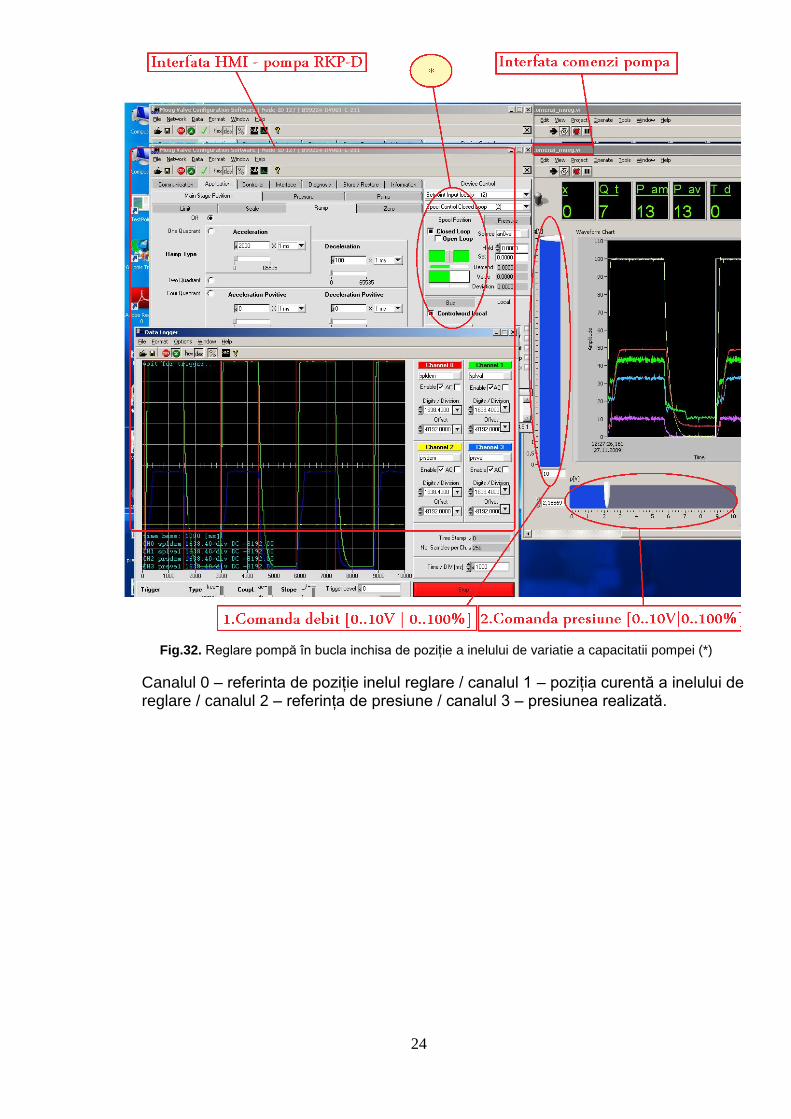
5.4. Reglarea parametrilor funcţionali ai servopompei MOOG tip RKP-D A fost creată o aplicaţie în mediul LABVIEW (fig.32) care, împreună cu interfaţa HMI a servopompei MOOG tip RKP-D, permit, de pe un PC, reglarea parametrilor pompei funcţie de particularităţile instalaţiei hidraulice ce conţine servopompa respectivă, şi anume:
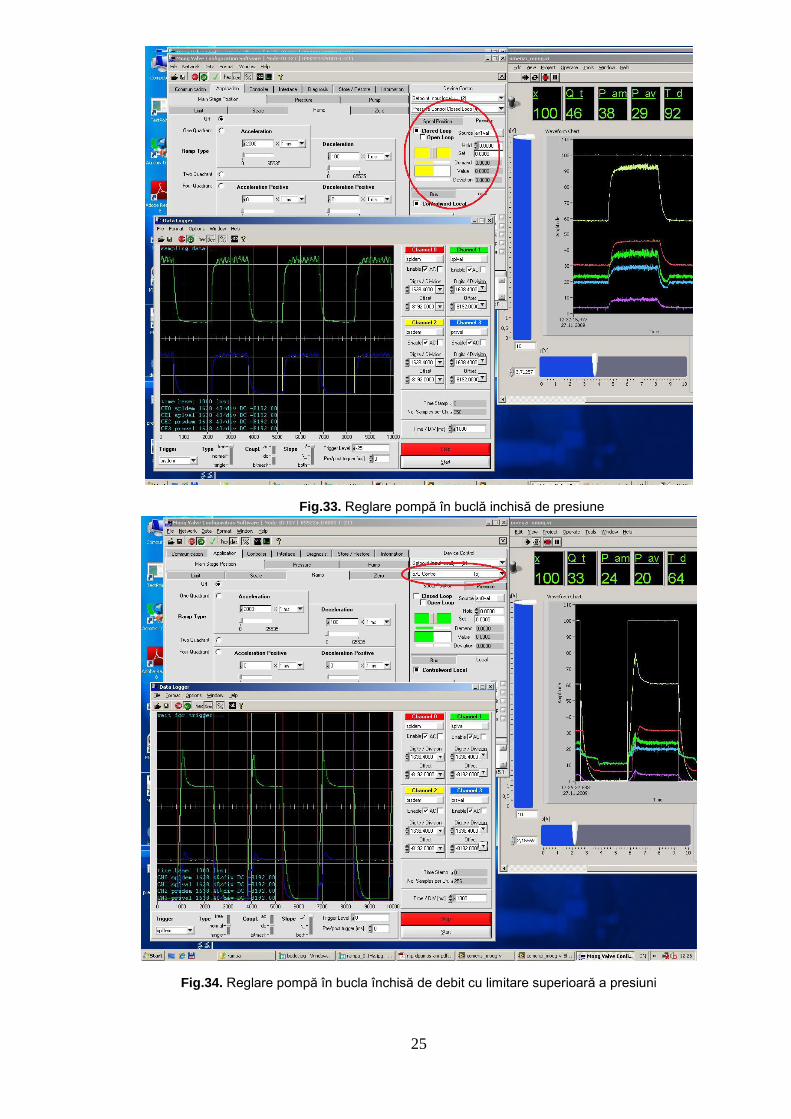
- reglarea pompei în buclă închisă de presiune (fig.33), aplicaţie ce se pretează la sisteme de acţionare hidraulice cu reglaj în secundar;
- reglarea pompei în buclă închisă de debit, cu limitarea superioară a presiunii (fig.34), aplicaţie ce se pretează la sisteme de acţionare hidraulice cu reglaj în primar;
- reglarea acceleraţiei / deceleraţiei semnalului comandă de presiune (fig.35), aplicaţie ce se pretează la reglarea comenzii în instalaţiile de acţionare hidraulice cu reglaj secundar;
- reglarea factorilor P (fig.36), I (fig.37) D (fig.38), ai regulatorului PID (proporţional, integrativ, derivativ), în cazul utilizării pompei în buclă închisă de presiune (reglaj secundar), cu scopul de a găsi “optimul” între rapiditatea şi stabilitatea sistemelor ce conţin acest tip de pompă.
24
Fig.32. Reglare pompă în bucla inchisa de poziţie a inelului de variatie a capacitatii pompei (*)
Canalul 0 – referinta de poziţie inelul reglare / canalul 1 – poziţia curentă a inelului de reglare / canalul 2 – referinţa de presiune / canalul 3 – presiunea realizată.
25
Fig.33. Reglare pompă în buclă inchisă de presiune
Fig.34. Reglare pompă în bucla închisă de debit cu limitare superioară a presiuni
26
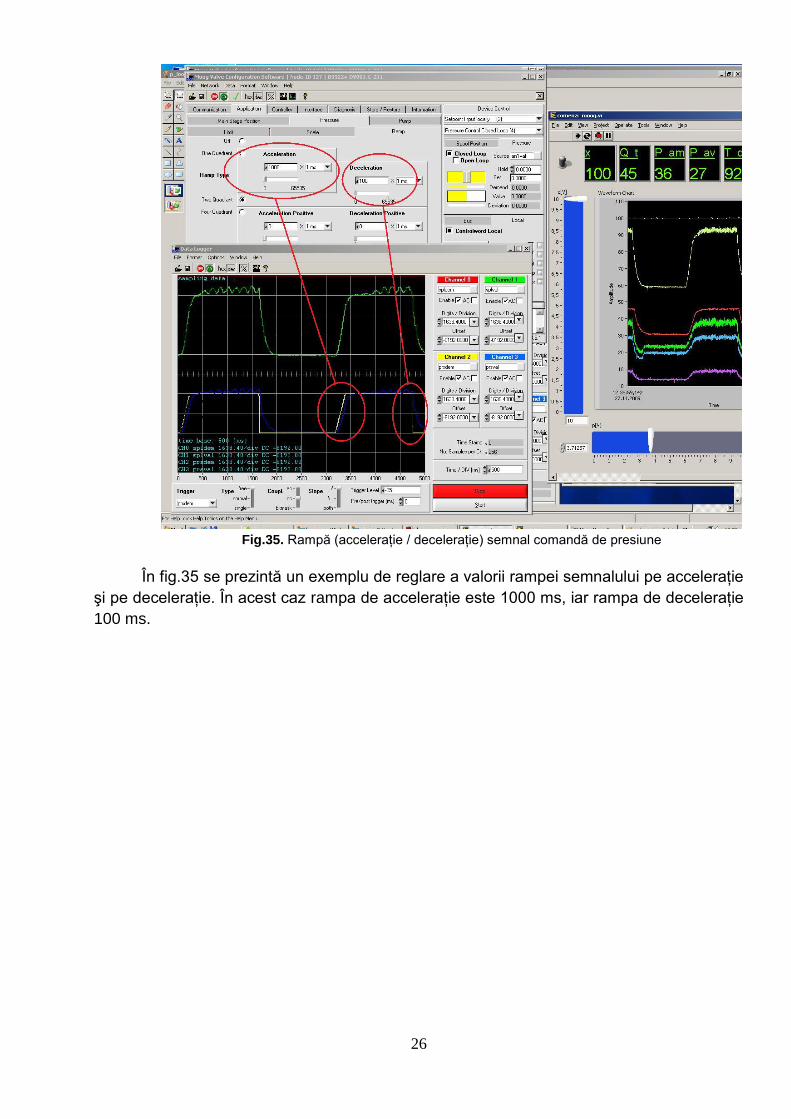
Fig.35. Rampă (acceleraţie / deceleraţie) semnal comandă de presiune
În fig.35 se prezintă un exemplu de reglare a valorii rampei semnalului pe acceleraţie
şi pe deceleraţie. În acest caz rampa de acceleraţie este 1000 ms, iar rampa de deceleraţie
100 ms.
27
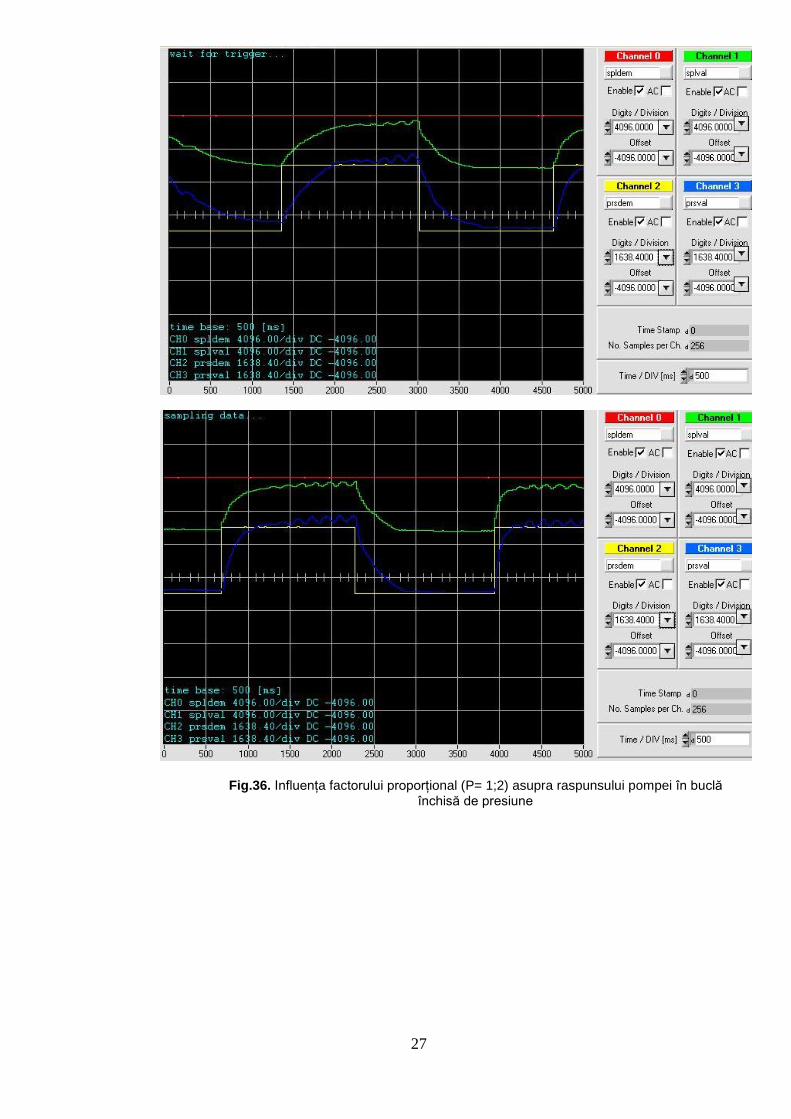
Fig.36. Influenţa factorului proporţional (P= 1;2) asupra raspunsului pompei în buclă închisă de presiune
28
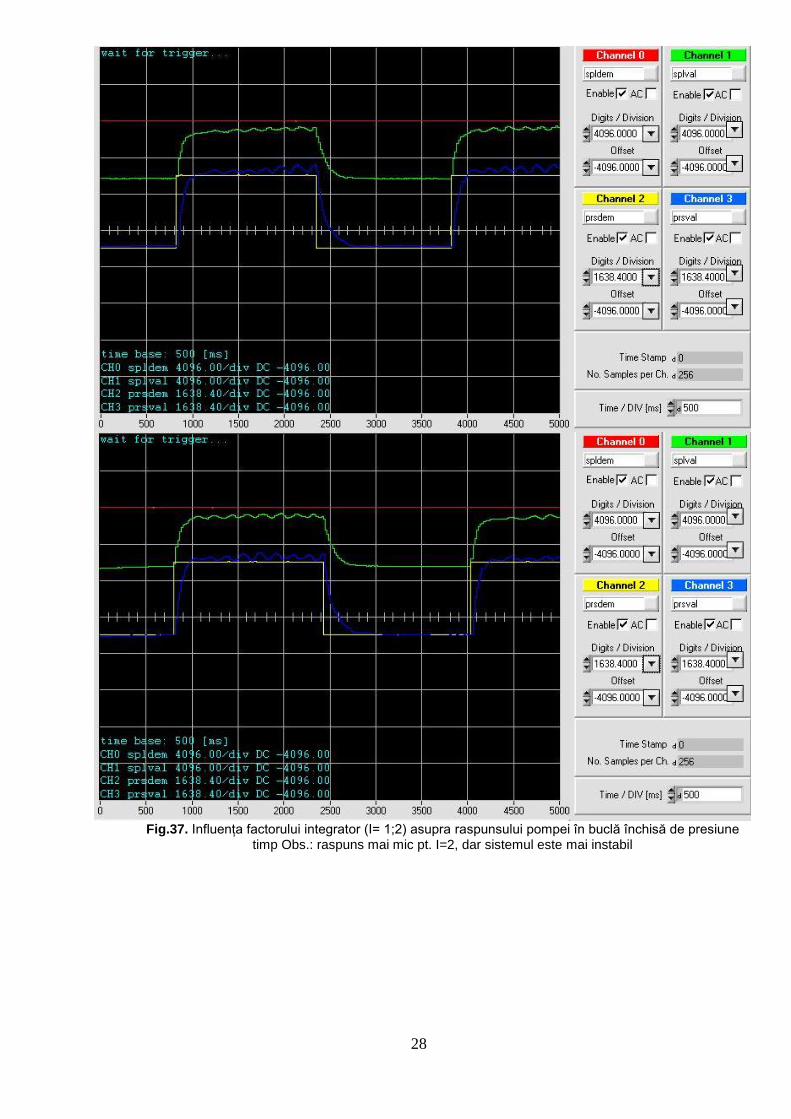
Fig.37. Influenţa factorului integrator (I= 1;2) asupra raspunsului pompei în buclă închisă de presiune
timp Obs.: raspuns mai mic pt. I=2, dar sistemul este mai instabil
29
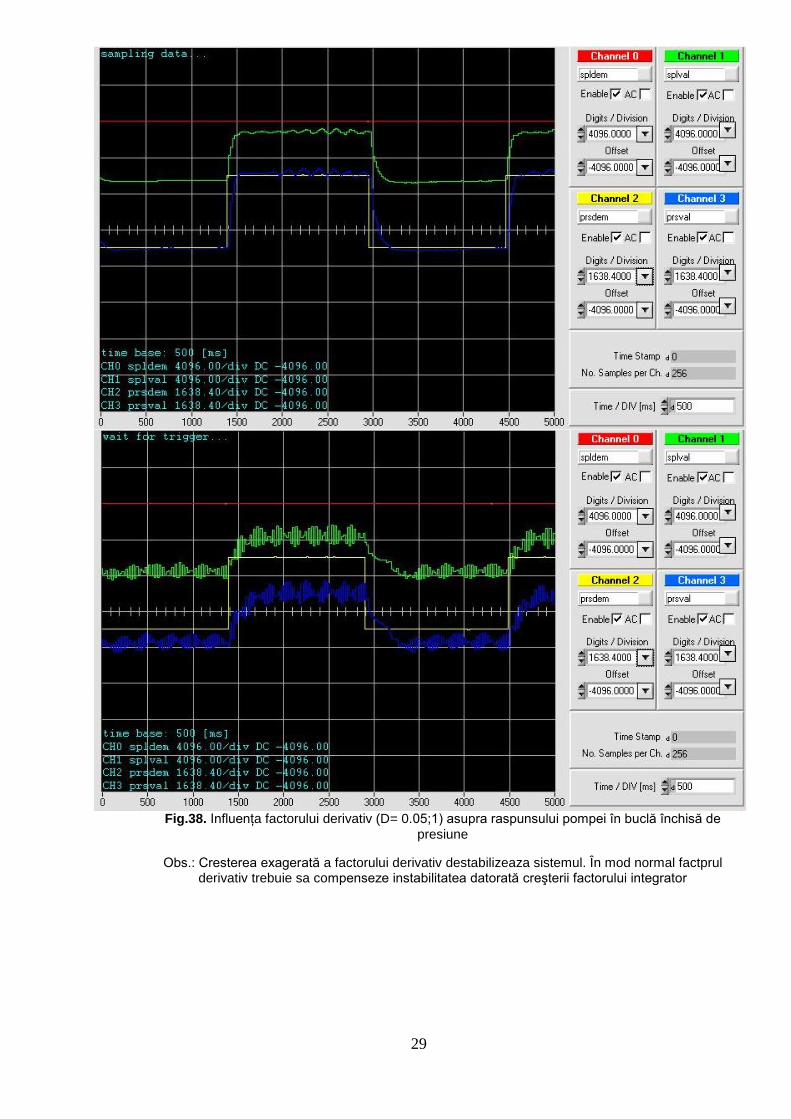
Fig.38. Influenţa factorului derivativ (D= 0.05;1) asupra raspunsului pompei în buclă închisă de
presiune
Obs.: Cresterea exagerată a factorului derivativ destabilizeaza sistemul. În mod normal factprul derivativ trebuie sa compenseze instabilitatea datorată creşterii factorului integrator
30
CONCLUZII
În această etapă s-a executat un dispozitiv de testare la sarcină variabilă a motoarelor hidraulice cu capacitate fixă şi variabilă (conf. schemei hidraulice cod DSSq-SH). Acest dispozitiv este integrat într-un stand probare debit mic (conf. schemei hidraulice cod SPDM-0-SH), care crează şi măsoară sarcina variabilă a motorului probat.
Din dispozitivul de simulare a sarcinii variabile lipseşte servomotorul hidraulic cu electronică integrată, care a fost comandat la MOOG (SUA) şi urmează să sosească până la sfîrşitul anului.
Dispozitivul de simulare a sarcinii variabile, echipat cu servomotorul cu electronică integrată MOOG şi integrat în standul de probare cu debit mic (cod SPDM-0-SH) este deplasabil şi se poate racorda hidraulic la un alt stand al IHP, care conţine o servopompă MOOG tip RKP-D.
Cele două standuri, în funcţionare simultană, formează o transmisie hidraulică în care standul care conţine servopompa MOOG reprezintă primarul transmisiei, iar standul care conţine dispozitivul de simulare a sarcinii şi servomotorul MOOG reprezintă secundarul transmisiei.
Funcţie de setarea legilor de reglare ale celor două maşini volumice cu electronică integrată MOOG, se pot testa şi analiza, d.p.d.v. energetic şi funcţional toate cele trei tipuri de reglaje pentru sistemele de acţionare hidraulice (SAH):
- SAH cu reglaj în primar, în care servopompa MOOG va funcţiona în buclă închisă de debit, iar servomotorul MOOG se va bloca pe o capacitate fixă;
- SAH cu reglaj în secundar, în care servopompa MOOG se va bloca pe o capacitate fixă, iar servomotorul MOOG va funcţiona în buclă închisă de debit;
- SAH cu reglaj în primar şi în secundar (reglaj mixt), în care servopompa MOOG va funcţiona în buclă închisă de presiune, iar servomotorul MOOG va funcţiona în buclă închisă de debit. Analiza comparativă a celor trei tipuri de reglaje ale SAH presupune cercetarea
teoretică şi experimentelă mai întâi a celor două servomaşini hidraulice rotative şi apoi a SAH cu reglaj primar, secundar şi mixt. Caracteristicile dinamice şi staţionare ale servomecanismului hidraulic de reglare a capacităţii servopompei MOOG tip RKP-D obţinute pe cale experimentală au confirmat caracteristicile obţinute pe cale teoretică, prin simulare numerică în AMESim.
Modelul complex de simulare în AMESim a funcţionării pompei MOOG tip RKP-D confirmă neuniformitatea debitului pompei la funcţionarea sa în gol, neuniformitate care se reduce substanţial la funcţionarea în sarcină a pompei, funcţie de mărimea sarcinii.
Testele preliminare, efectuate asupra servopompei MOOG tip RKP-D, au permis etalonarea traductorului de debit format dintr-o diafragmă şi două traductoare de presiune, mult mai sensibil la probe dinamice faţă de traductorul cu turbină, caracterizat de o masă inerţială.
Testele în regim staţionar, efectuate asupra servopompei MOOG tip RKP-D, au demonstrat o bună proporţionalitate între comandă şi debitul realizat, proporţionalitate caracterizată de un hxsterezis mai mic de 1%.
Testele în regim dinamic, efectuate asupra servopompei MOOG tip RKP-D, au demonstrat un răspuns rapid al comenzii, la diferite semnale de excitaţie cu frecvenţă de max. 2,2 Hz, frecvenţă la care atenuarea semnalului este de 70%.
A fost creată o aplicaţie în mediul LABVIEW care, împreună cu interfaţa HMI a servopompei MOOG tip RKP-D, permit, de pe un PC: reglarea servopompei în buclă închisă de debit sau în buclă închisă de presiune; reglarea acceleraţiei/deceleraţiei semnalului de comandă; reglarea factorilor P, I, D ai regulatorului PID din blocul electronic al servopompei.
31
Se propune continuarea lucrării cu completarea execuţiei pentru cele trei tipuri de SAH (reglaj primar, reglaj secundar, reglaj mixt), cu testarea lor şi cu analiza comparativă d.p.d.v. energetic şi funcţional.
BIBLIOGRAFIE
1. Vasiliu, N., Catană, I. Transmisii hidraulice şi electrohidraulice. vol. I - Maşini
hidraulice volumice, Editura Tehnică, Bucureşti, 1988.
2. Vasiliu, D., Vasiliu, N. Acţionări şi comenzi hidropneumatice în energetică.
(Litografiat). Universitatea "Politehnica" din Bucureşti, 1993.
3. Vasiliu, N., Vasiliu, D. Acţionări hidraulice şi pneumatice. Vol.I, Editura
Tehnică, Bucureşti, 2004.
4. Teodor Costinel POPESCU, Cercetări asupra sintezei sistemelor de acţionare
hidraulice, Universitatea "Politehnica" din Bucureşti, 162 pg., 2001-2008- Teză
de doctorat.
5. Teodor Costinel POPESCU, Marian BLEJAN, Gheorghe ŞOVĂIALĂ, 7297
2D-Experimental Research upon Accommodating the Functional Parameters of
a Laser Controlled System Designed for a Grading Machinery with the Actual
Operating Conditions of the Grading Machinery, ATOM-N 2008, 28...31
August 2008, Constanţa, Romania, The 4th edition of the International
Conference "Advanced Topics in Optoelectronics, Microelectronics, and
Nanotechnologies", Proceedings of SPIE Vol. 7297 (SPIE, Bellingham, WA,
2009), Article CID Number 7297-86, ISSN: 0277-786X, ISBN: 9780819475596,
5pg., 07.01.2009.
http://spiedigitallibrary.aip.org/dbt/dbt.jsp?KEY=PSISDG&Volume=7297&Issu
e=1&bproc=volrange&scode=7200+-+7297
6. Teodor Costinel POPESCU, Andrei DRUMEA, Iulian DUŢU, Numerical
simulation and experimental identification of the laser controlled modular
system purposefully created for equipping the terrace leveling installations,
International Spring Seminar on Electronics Technology (ISSE) Budapest,
Hungary; 7-11 May, 2008, in: "Abstract Proceedings - Reliability and
Life-time Prediction", (2008), ISBN: 978-963-06-4915-5; pp.336-
341. http://www.isse-eu.net
7. Marian Blejan, Bogdan Lupu, Iulian Duţu, Danuţ Rotaru, Teodor Costinel
Popescu, Electronic Oscillator for a Hydraulic Flow Divider, 32nd
International
Spring Seminar on Electronics Technology (ISSE) "Hetero System Integration,
the path to New Solutions in the Modern Electronics" Brno, Czech Republic;
13-17 May, 2009, in: IEEE Catalog Number: CFP09509, ISBN: 978-1-4244-
4260-7; LIBRARY OF CONGRESS 2009902025; Poster Session (E),
E01. http://www.isse-eu.net
8. Teodor Costinel Popescu, Iulian Dutu, Catalin Vasiliu, Marius Mitroi,
Adjustement of conformity parameters of PID-type regulators using simulation
by AMESim, 7th
International Industrial Simulation Conference 2009, ISC 2009,
June 1-3, 2009, Loughborough, United Kingdom, Article Number ENERG_01,
pp.269-274, http://www.eurosis.org/cms/?q=node/927 (Publication of EUROSIS-
ETI).
