Comanda Secventiala a Actionarilor Electrice - Capitolul 1
47
INTRODUCERE Caracteristica generală şi clasificarea sistemelor de comandă automatizată ale acţionărilor electrice Acţionările electrice (AE) ale mecanismelor şi maşinilor de lucru (ML) industriale moderne se caracterizează prin anumite particularităţi. În primul rând, ele sunt relativ complexe (complicate), deoarece includ mai multe elemente componente: identice sau de natură diferită (mecanice, electromecanice, electrice, electronice); de aceeaşi putere sau de puteri diferite; atât în partea de forţă (motoare, reductoare, organe de lucru), cât şi în partea de comandă (traductoare, dispozitive de comandă, reglare, protecţie, semnalizare); unele elemente sunt interdependente unele de altele (la strunguri puterea de aşchiere a metalelor, pentru arborele principal depinde de adâncimea cuţitului de tăiere sau frezare şi de viteza mecanismelor de avans), sau sunt legate printr-un parametru tehnologic la funcţionarea în paralel (presiunea de ieşire a unei pompe acţionează asupra unei alte pompe, conectate la aceeaşi reţea). În al doilea rând, majoritatea maşinilor de lucru sau a instalaţiilor industriale sunt automatizate cu ajutorul unui sistem de automatizare (SA), chiar dacă viteza motorului sau motoarelor nu este reglabilă. În al treilea rând, automatizarea complexă a multor instalaţii industriale nu poate fi făcută fără acţionări electrice reglabile (cu viteză lin- variabilă), la fel ca şi stabilizarea unor parametri tehnologici în procesul de variaţie a perturbaţiilor (de exemplu, stabilizarea presiunii unei pompe la variaţia debitului de consum). 1
-
Upload
mitocaru-madalina -
Category
Documents
-
view
657 -
download
2
Transcript of Comanda Secventiala a Actionarilor Electrice - Capitolul 1

INTRODUCERE
Caracteristica generală şi clasificarea sistemelor de comandă automatizată ale acţionărilor electrice
Acţionările electrice (AE) ale mecanismelor şi maşinilor de lucru (ML) industriale moderne se caracterizează prin anumite particularităţi. În primul rând, ele sunt relativ complexe (complicate), deoarece includ mai multe elemente componente:
identice sau de natură diferită (mecanice, electromecanice, electrice, electronice);
de aceeaşi putere sau de puteri diferite; atât în partea de forţă (motoare, reductoare, organe de lucru), cât şi în
partea de comandă (traductoare, dispozitive de comandă, reglare, protecţie, semnalizare);
unele elemente sunt interdependente unele de altele (la strunguri puterea de aşchiere a metalelor, pentru arborele principal depinde de adâncimea cuţitului de tăiere sau frezare şi de viteza mecanismelor de avans), sau sunt legate printr-un parametru tehnologic la funcţionarea în paralel (presiunea de ieşire a unei pompe acţionează asupra unei alte pompe, conectate la aceeaşi reţea).
În al doilea rând, majoritatea maşinilor de lucru sau a instalaţiilor industriale sunt automatizate cu ajutorul unui sistem de automatizare (SA), chiar dacă viteza motorului sau motoarelor nu este reglabilă.
În al treilea rând, automatizarea complexă a multor instalaţii industriale nu poate fi făcută fără acţionări electrice reglabile (cu viteză lin-variabilă), la fel ca şi stabilizarea unor parametri tehnologici în procesul de variaţie a perturbaţiilor (de exemplu, stabilizarea presiunii unei pompe la variaţia debitului de consum).
În legătură cu toate acestea acţionările electrice ale multor maşini şi instalaţii industriale reprezintă un sistem de acţionare electrică (SAE) sau un sistem de mai multe acţionări electrice cu funcţionare în grup, automatizate în conformitate cu cerinţele unui proces tehnologic. Ca urmare, analiza, elaborarea, proiectarea, modernizarea şi implementarea acestor sisteme automatizate pot servi ca un obiect de studiu aparte – sisteme de comandă automatizată ale acţionărilor electrice (SCA AE) sau ca o continuare a cursului general de acţionări electrice, adică partea a II a lui. Dacă cursul general (partea I) pune accentul pe principiile generale de comandă – pornirea, frânarea, reglarea şi inversarea vitezei motoarelor şi acţionărilor electrice, alegerea sau calculul puterii lor, atunci cursul SCA AE are ca obiective principale automatizarea complexă şi reglarea automată a regimurilor generale menţionate, precum şi optimizarea lor.Ultima funcţie subînţelege optimizarea tuturor parametrilor principali : energetici, electromagnetici, mecanici, tehnologici. Evident, că această optimizare nu poate fi obţinută fără automatizare, de aceea ele trebuie concepute împreună.
1

Reieşind din aceste obiective, cursul SCA AE poate fi împărţit în 2 sau 3 părţi principale:
1. Sisteme de comandă automatizată ale acţionărilor electrice nereglabile;2. Sisteme de comandă şi reglare automată ale acţionărilor electrice
reglabile;3. Sisteme de comandă automatizată ale acţionărilor electrice combinate.
Fiecare din aceste sisteme conţine 2 părţi principale: partea de forţă (putere sau tensiune înaltă); partea de comandă (de tensiune joasă).
Partea de putere se clasifică, la rândul ei, după tipul motoarelor de acţionare: de curent continuu: de curent alternativ(asincrone, sincrone, speciale)
precum şi după numărul acestor motoare: cu un singur motor (individuală); cu mai multe motoare (în grup).
SAE reglabile de curent continuu se realizează cu redresoare comandate, în cazul unei reţele de alimentare de curent alternativ, sau cu variatoare discrete de curent continuu, numite şi choppere, în cazul unei reţele de alimentare de curent continuu. SAE reglabile de curent alternativ se realizează în prezent cu convertizoare de frecvenţă cu invertoare autonome de tensiune modulată în frecvenţă înaltă.
Partea de comandă a SAE reglabilă în trecut se compunea din blocuri şi dispozitive separate cu funcţii constante şi ne programabile. Dintre aceste dispozitive cele mai principale erau următoarele :
de generare, convertire, divizare, comparare, numărare, memorizare, temporizare şi amplificare a semnalelor;
de reglare automată; de prescriere şi de măsurare; de protecţie şi de separare; de afişare şi semnalizare.
Aceste dispozitive pot fi realizate cu semnale analogice, sau discrete (logice sau digitale). În prezent majoritatea din aceste funcţii se realizează în variantă discretă (numerică) şi programabilă cu ajutorul microprocesoarelor şi microcontrolerelor. Acestea din urmă pot avea diferite principii şi limbaje de programare – unele mai simple, iar altele mai complicate. Însă oricare ar fi ele, majoritatea microcontrolerelor moderne se programează cu ajutorul calculatoarelor, utilizând nişte programe speciale. Automatizarea SAE nereglabile în trecut se realiza cu relee şi elemente logice discrete (microscheme), iar în prezent se efectuează cu ajutorul unor microcontrolere programabile mai simple. Însă oricare ar fi varianta de realizare, ele se numesc sisteme de comandă automatizată secvenţială, deoarece au la bază un algoritm consecutiv de operaţii, funcţii şi secvenţe.
Conţinutul capitolelor următoare va avea la bază principiile şi criteriile de clasificare ale sistemelor de comandă, menţionate mai sus.
PARTEA I
2

SISTEME DE COMANDĂ AUTOMATIZATĂ ALE ACŢIONĂRILOR ELECTRICE NEREGLABILE
1. SCHEME TIPICE DE COMANDĂ AUTOMATZATĂ SECVENŢIALĂ CU RELEE ŞI CONTACTOARE ALE MOTOARELOR
ELECTRICE
1.1. Noţiuni generale
Schemele de comandă automatizată cu relee şi contactoare sunt cele mai simple sisteme de automatizare ale motoarelor de acţionare electrică nereglabilă. Aceste scheme asigură un număr relativ mic de operaţii – cele mai principale:
pornirea şi oprirea motoarelor; frânarea electrică şi mecanică a lor; inversarea sensului de rotaţie; reglare reostatică a vitezei în câteva trepte; protecţia motoarelor contra regimurilor principale de avarie; semnalizarea regimurilor principale de funcţionare.
Aceste operaţii poartă un caracter secvenţial, de aceea schemele electrice de realizare a lor se numesc scheme de comandă secvenţială. Ele sunt constituite, după cum a fost deja menţionat, din 2 părţi principale:
partea de comandă (PC), care formează algoritmul de comandă automatizată şi de protecţie a motoarelor electrice;
partea de forţă (PF), (de execuţie a algoritmului de comandă), care asigură alimentarea şi comutaţia circuitelor de putere ale motoarelor (M) (fig.1).
Partea de comandă este constituită din 2 tipuri de elemente principale:
elemente de comandă(EC): butoane, comutatoare, comando – controlere;
Relee de comandă (RC): relee electromagnetice de tensiune, curent, timp, termice, electronice de timp sau de protecţie. Fig.1
Partea de forţă (PF) este alcătuită din întrerupătoare automate pentru protecţia motoarelor la scurtcircuit şi suprasarcină şi din contactoare electromagnetice, destinate pentru comutaţii frecvente ale curenţilor mari şi prevăzute cu camere de stingere ale arcului electric, care apare la deconectarea sarcinilor activ – inductive. Curentul nominal al întrerupătoarelor automate şi al contactoarelor trebuie să depăşească curentul nominal al circuitelor comutate cu 30 – 50%.
Deoarece schemele de comandă automatizată cu relee şi contactoare realizează nişte operaţii şi regimuri tipice, menţionate mai sus, pentru fiecare din ele au fost propuse nişte module tipice, sau module standardizate, care şi – au demonstrat
3

eficacitatea lor în practică. La baza lor stau, de obicei, unul sau mai multe principii, în funcţie de care are loc formarea algoritmului de comandă. De exemplu, pornirea reostatică în câteva trepte a unui motor poate fi efectuată în funcţie de timp, de viteză sau de curentul motorului, de unde provine şi denumirea principiului sau a modulului care – l realizează. În paragrafele următoare aceste principii vor fi analizate şi concretizate pentru fiecare modul sau schemă în parte. Schema bazată pe module tipice, se numeşte schemă tipică.
Schemele tipice de comandă automatizată secvenţială cu relee şi contactoare, datorită simplităţii, accesibilităţii şi bunei lor vizibilităţi, şi – au găsit o largă utilizare în acţionările electrice nereglabile ale diferitor mecanisme industriale tipice (MIT), cum ar fi:
pompele, ventilatoarele şi compresoarele; conveierele şi benzile transportoare: maşinile unelte şi strungurile simple; macaralele şi ascensoarele clasice.
Aceste scheme mai au şi alte avantaje: putere de comutaţie mare; separare electrică naturală a circuitelor de forţă şi de comandă; posibilitatea utilizării unei singure tensiuni de alimentare;
stabilitatea înaltă de funcţionare la acţiunea diferitor perturbaţii şi semnale parazite de provenienţă electromagnetică.
Pe lângă aceste avantaje, schemele cu relee posedă şi unele dezavantaje: fiabilitatea scăzută, condiţionată de arcul electric la deconectare; gabarite şi mase mari; consum mare de energie electrică; rapiditate scăzută şi frecvenţă limitată de funcţionare.
În legătură cu aceste dezavantaje schemele complexe de comandă se realizează cu elemente logice fără contacte sau cu microcontrolere simplificate.
1.2 Scheme tipice de comandă automatizată secvenţială cu relee şi contactoare ale motoarelor asincrone în scurtcircuit
Schemele tipice de comandă automatizată secvenţială cu relee şi contactoare ale motoarelor asincrone (MA) în scurtcircuit de putere mică şi mijlocie sunt cele mai simple, deoarece ele sunt proiectate special pentru pornirea directă prin cuplarea statorului la reţea. Însă MA de putere mare (>500kW) nu permit aceasta, ceea ce impune utilizarea unor procedee şi scheme speciale de pornire prin introducerea temporară în circuitul statoric de tensiune înaltă a unor elemente adăugătoare (inductivităţi, autotransformatoare) în scopul micşorării curentului de pornire.
Problema pornirii MA cu rotorul bobinat de orice putere se rezolvă relativ simplu: prin introducerea temporară a unor rezistenţe adăugătoare în circuitul rotoric. Automatizarea procesului de şuntare a acestor rezistenţe la pornire se efectuează în cele mai multe cazuri în funcţie de timp.
Comanda automatizată a motoarelor asincrone prevede, de regulă, nu numai pornirea, ci şi alte funcţii, impuse de procesul tehnologic al maşinii de lucru sau de
4

cerinţele de protecţie şi securitate. Dintre aceste funcţii fac parte: frânarea, inversarea, reglarea, comanda din câteva locuri, semnalizarea, protecţia la scurtcircuit şi la suprasarcină, blocarea unor regimuri tehnologice sau electrice nedorite ş.a. Realizarea acestor funcţii poate fi făcută prin mai multe principii, iar ca urmare şi prin mai multe variante ale schemelor tipice de comandă. Frânarea, de exemplu, poate fi făcută în contracurent, prin metoda dinamică sau recuperativă.
Pe lângă, comanda automatizată schemele tipice mai prevăd, de obicei, şi o comandă manuală (de rezervă).
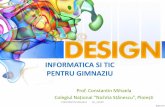
În figura 1.1, a este reprezentată schema de forţă a pornirii directe nereversibile a motorului asincron trifazat cu rotorul în scurtcircuit, care prevede în circuitul statorului un întrerupător automat QF, pentru protecţie la scurtcircuit, un releu termic cu două elemente sensibile KK pentru protecţie la suprasarcină şi contactele de forţă ale contactorului (demarorului) trifazat KM. Această schemă poate avea 3 variante de comandă: 1) cu un singur element de comandă pentru pornire şi oprire – un întrerupător simplu SA, care asigură o autopornire la dispariţia şi reapariţia tensiunii reţelei de alimentare. În sistemele complexe de automatizare în locul întrerupătorului SA s foloseşte contactul de ieşire K a unui bloc automat, de exemplu a unui microcontroler (fig. 1.1, b);
2) cu un singur element de comandă pentru pornire şi oprire – un buton simplu SB cu contact normal – deschis şi fără autopornire la dispariţia tensiunii – la luarea degetului de pe buton motorul se opreşte (fig. 1.1, c); 3) cu 2 butoane de comandă: SB1 cu contact normal – deschis pentru pornire şi SB2 cu contact normal – închis pentru oprire, precum şi cu o automenţinere a stării de funcţionare a motorului la luarea degetului de pe butonul SB1. Această automenţinere se realizează prin şuntarea butonului SB1 cu contactul normal – deschis auxiliar al contactorului KM. În caz de suprasarcină de curent de 5 – 40% contactul releului termic deconectează motorul.
Fig.1.1 Scheme de comandă nereversibilă a motorului asincron În figura 1.2 este indicată schema de pornire directă reversibilă a MA cu 2
contactoare tripolare KM1 şi KM2, care alcătuiesc un demaror reversibil şi care
5

asigură schimbarea succesiunii a 2 faze de alimentare a statorului. O astfel de schemă poate realiza nu numai pornirea directă a motorului într – un sens sau altul, ci şi frânarea prin contracurent. Aceasta din urmă însă este însoţită de şocuri de curent de 2 ori mai mari decât curentul de pornire directă. Pentru a evita aceste şocuri, înainte de inversare trebuie, mai întâi de apăsat SB3 „STOP”, deconectând contactorul acţionat , şi abia după oprirea motorului trebuie apăsat al doilea buton.
Automenţinerea fiecărui contactor în stare acţionată la apăsarea temporară a butonului de sens direct (D) SB1, sau a butonului de sens invers (I) SB2, se efectuează la fel ca şi la comanda nereversibilă: prin şuntarea butoanelor SB1 şi SB2 cu contactele auxiliare normal – deschise ale contactoarelor corespunzătoare KM1 şi KM2. Această schemă de comandă însă mai asigură o protecţie adăugătoare: de acţionare simultană a ambelor contactoare, urmată de scurtcircuitarea a două faze a reţelei. Pentru evitarea ei, bobina contactorului KM1 se înseriază cu contactul auxiliar normal – închis KM2, iar bobina contactorului KM2 – cu contactul normal – închis KM1. În legătură cu aceasta contactele normal – închise KM1 şi KM2 se mai numesc contacte de interblocare.
Fig.1.2 Comanda reversibilă a motorului asincron în scurcircuit În unele scheme de comandă secvenţială, cum ar fi cele ale macaralelor, în plus
la aceste contacte şi pentru acelaşi scop, se mai foloseşte o interblocare de rezervă – interblocare mecanică cu ajutorul unor tije speciale.
În practică se mai utilizează şi alte variante de interblocare a contactoarelor. De exemplu, în locul contactelor normal – închise ale contactoarelor se folosesc contactele normal – închise ale butoanelor de pornire. Această variantă permite deja comutarea contactoarelor din mersul normal de funcţionare a motorului, fără o stopare prealabilă a lui, ci apăsând doar celălalt buton. De aceea ea se foloseşte pentru comanda unui motor cu 2 viteze, unde este raţională. O astfel de comandă este reprezentată în figura 1.3, unde fiecare înfăşurare de fază statorică este constituită din 2 secţii egale. Prin conectarea acestor secţii în triunghi sau în stea dublă se pot obţine 2 variante de perechi de poli ale înfăşurării statorice, iar ca urmare – 2 viteze diferite, de exemplu n1=60f1/p1=60*50/2=1500 rot/min şi
6

n2=60f1/p2=60*50/1=3000 rot/min. Pentru conexiunea de stea dublă sunt necesare 5 contacte de forţă, de aceea se folosesc 2contactoare KM2, bobinele cărora sunt conectate paralel. Partea de comandă a acestei scheme conţine 2 butoane(SB1 şi SB2) cu câte un contact normal – închis de interblocare, destinat pentru deconectarea celuilalt contactor. Trecerea de la viteza mare la cea mică este însoţită de o frânare recuperativă a motorului. Oprirea motorului din oricare regim se efectuează prin butonul SB3 STOP.
Fig.1.3 Comanda secvenţială a unui motor asincron cu 2 vitezeÎn figura 1.4 este reprezentată schema de pornire a MA cu o singură viteză şi
de frânare dinamică automatizată în funcţie de timp. Pornirea se face prin apăsarea butonului SB1 cu automenţinere a contactorului KM1. Frânarea dinamică se realizează prin apăsarea butonului SB2, deconectarea motorului de la reţeaua trifazată şi alimentarea a 2 faze statorice cu curent continuu prin contactorul KM2. Durata frânării este determinată de temporizarea releului electromagnetic de timp KT cu temporizare la deconectare.
Fig.1.4 Schema de pornire directă şi de frânare dinamică a MA
7

O utilizare largă în practică o are pornirea STEA-TRIUNGHI, care asigură o micşorare de 3 ori a curentului de pornire a motorului, conectând statorul mai întâi în STEA, la o tensiune de fază de 1,73 ori mai mică. După o pauză de 7-10 s, un releu de timp reconectează motorul în TRIUNGHI la o tensiune de fază, egală cu tensiunea de linie şi la o putere nominală. Schema de forţă la pornirea STEA-TRIUNGHI prevede 3 contactoare de putere: Q11 – de linie; Q13 – STEA şi Q15 – TRIUNGHI, precum şi un releu termic de protecţie la suprasarcină F2, dacă în locul întrerupătorului automat sunt utilizate siguranţe fuzibile. (fig.4.28).
Fig.4.28 Schema tipică de pornire STEA-TRIUNGHI a motorului asincron
Partea de comandă a acestei scheme, cu un bloc S11 cu 2 butoane - I START şi 0 STOP, precum şi cu un releu de timp cu temporizare la conectare K1, este arătată în figura 4.29 (în 2 variante). Schema funcţionează în felul următor.
La apăsarea butonului I START, prin contactul normal închis al releului de timp K1/15-16, se alimentează mai întâi bobina contactorului Q13 STEA. Contactul normal deschis al acestui contactor Q13/13-14 alimentează, la rândul său, bobina contactorului principal de linie Q11, care porneşte motorul în STEA,, precum şi bobina releului de timp K1, care începe numărarea timpului prescris. Când acest timp expiră, releul de timp K1 deconectează contactorul Q13
8

STEA şi conectează contactorul Q15 TRIUNGHI, aplicând motorului o tensiune nominală. Contactul de interblocare Q15/21-22 întrerupe circuitul bobinei contactorului Q13 STEA pentru a nu putea fi acţionat în timpul funcţionării în TRIUNGHI. Oprirea şi protecţia motorului este aceeaşi, ca şi în schemele precedente.
Varianta a doua mai prevede o protecţie tehnologică cu ajutorul contactului normal închis S14/1-2, care poate fi contactul unui releu de presiune, sau de debit
Fig.4.29 Partea de comandă a schemei tipice de pornire STEA-TRIUNGHI a MA
O configuraţie asemănătoare o au şi schemele de comandă ale motoarelor cu 2 sau cu 4 viteze, care se obţin prin schimbarea numărului de perechi de poli ai înfăşurării statorice. Aceste viteze se obţin în cazurile, când statorul motorului include câte 2 secţii pentru fiecare înfăşurare de fază, care pot fi conectate în TRIUNGHI sau în STEA DUBLĂ (fig.4.30).
Fig.4.30
9

1.3. Schema tipică de comandă secvenţială a motorului asincron cu rotorul bobinat
Schema tipică de pornire reostatică în 2 trepte şi frânare dinamică în funcţie de timp a unui motor asincron cu rotorul bobinat este reprezentată în figura 1.5. Ea este constituită din două părţi principale: partea de forţă a statorului şi rotorului motorului, comutată cu ajutorul contactelor de forţă ale contactorului principal (de linie) KM1, contactorului de frânare dinamică KM2, contactoarelor de accelerare KM3 şi KM4, precum şi partea de comandă a acestor contactoare, prin alimentarea coordonată a bobinelor electromagneţilor acestor contactoare. Aceasta din urmă mai conţine releele electromagnetice de timp KT1 şi KT2, destinate pentru pornirea reostatică în funcţie de timp; releul KT3 pentru comanda frânării dinamice; contactorul KM5 de alimentare a frânei electromagnetice YA; releul de protecţie KV şi controlerul de comandă SA, care are 4 contacte, 3 poziţii de lucru 1-2-3 în dreapta, 3 poziţii simetrice în stânga şi o poziţie iniţială 0.
Fig.1.5 Schema tipică de comandă secvenţială a MA cu rotorul bobinat
Pentru funcţionarea schemei se închid întrerupătoarele automate QF1 şi QF2, iar controlerul de comandă se instalează în poziţia iniţială 0. În această poziţie acţionează releul de protecţie KV, care apoi se auto alimentează prin contactul său propriu, pregătind alimentarea bobinelor KM1, KM3, KM4, precum şi releul de timp KT1, care întrerupe circuitul bobinelor contactoarelor
10

de accelerare KM3 şi KM4, pregătind astfel circuitul rotoric pentru o pornire cu rezistenţele R1 şi R2 introduse.
Poziţiilor de lucru 1-2-3 ale controlerului SA le corespund diferite viteze ale motorului şi anume: poziţia 1- viteza minimă, când ambele rezistenţe R1 şi R2 sunt introduse; 2-viteza medie când rezistenţa R2 este şuntată; 3-viteza maximă(nominală), când sânt şuntate ambele rezistenţe şi motorul funcţionează pe caracteristica sa naturală. Alegerea unei din aceste poziţii, cu care începe pornirea, depinde de operator. Presupunem, că este aleasă poziţia 3. În acest caz acţionează mai întâi contactorul principal de linie KM1, care prin contactele sale de forţă conectează statorul la reţeaua de alimentare cu ambele rezistenţe rotorice introduse, iar prin contactele sale auxiliare acţionează contactorul frânei electromagnetice KM5, releul de temporizare a frânării dinamice KT3 şi deconectează releul de timp KT1. Aceasta din urmă îşi începe temporizarea sa, după terminarea căreia închide circuitul contactorului de accelerare KM3. Ca urmare, se şuntează prima treaptă a rotorului, transferând motorul pe caracteristica reostatică R1, iar contactul auxiliar KM3 întrerupe, la rândul său, alimentarea releului de timp KT2. În mod analogic începe temporizarea acestui releu, calculată pentru accelerarea motorului de la viteza minimă la cea medie. Când această temporizare expiră, se alimentează bobina contactorului KM4 şi se şuntează cea dea doua treaptă din rotor. Accelerarea în continuare a motorului, până la viteza nominală, are loc deja pe caracteristica sa naturală.
Trecerea motorului în regim de frânare dinamică se realizează prin transferarea controlerului de comandă în poziţia iniţială 0. În acest moment prin KM1 se deconectează statorul de la reţeaua alternativă, iar prin KM5 şi frâna YA se acţionează frâna mecanică. Totodată releul deconectat de timp KT3 acţionează contactorul KM2, iar acesta din urmă conectează 2 faze statorice la o sursă de curent continuu. Ca urmare, la frânarea mecanică se adaogă frânarea electrică dinamică, intensitatea căreea este determinată de valoarea curentului continuu, limitată de reostatul de frânare din circuitul de curent continuu. În acest regim motorul asincron funcţionează ca generator de curent continuu fără colector, care transformă energia mecanică a maselor aflate în mişcare în energie electrică, transformată apoi în căldură în circuitul rotoric. După oprirea definitivă a motorului şi expirarea temporizării releului KT3, se întrerupe circuitul bobinei KM2 şi schema revine în poziţie iniţială.
În cazul unor suprasarcini la arborele motorului, controlate de către releele de curent KA1-KA3, se întrerupe circuitul releului de protecţie KV, care la rândul său deconectează alimentarea bobinelor tuturor contactoarelor principale. Releul KV mai îndeplineşte încă o funcţie de protecţie : la dispariţia temporară a tensiunii reţelei de alimentare şi la pornirea ne reostatică a motorului după apariţia acestei tensiuni, când controlerul se află într-o poziţie de lucru 2 sau 3. În acest caz pornirea ulterioară automată poate fi efectuată doar începând din nou cu poziţia iniţială 0 şi cu limitarea curentului de pornire conform algoritmului descris mai sus.
11

Interblocarea contactoarelor principale KM1 şi KM2 se realizează pe cale electrică prin contactele auxiliare normal-închise ale acestor contactoare.
1.4. Principii şi dispozitive moderne de protecţie a motoarelor asincrone
1.4.1. Principii şi noţiuni generaleMotoarele asincrone (MA) de utilizare generală, pe lângă simplitatea şi preţul
mic de cost, posedă totuşi un dezavantaj principal : sunt sensibile la diferite regimuri anormale şi, în deosebi la suprasarcini la arbore, deoarece cuplul maxim al lor este limitat: Mmax=(1,8 – 2,5)MN la fel cum şi cuplul de pornire Mp=(1,2 – 1,8)MN. Depăşirea cuplului MS> Mmax, chiar pe o perioadă scurtă, condiţionează oprirea motorului şi trecerea lui în regim de scurtcircuit cu o alunecare S=1 şi un curent . Dacă cuplul de suprasarcină nu se micşorează şi dacă protecţia motorului nu-l deconectează timp îndelungat de la reţea, regimul de scurcircuit conduce la supraîncălzirea şi ieşirea lui din funcţie. De aceea protecţiei trebuie să i se acorde o atenţie şi o importanţă deosebită, deoarece aceasta nu este numai o problemă tehnică, ci deseori şi una economică. Într – adevăr, ieşirea din funcţie a motorului este însoţită, de regulă, şi de întreruperea îndelungată a unui proces tehnologic sau a unui utilaj costisitor, iar, ca urmare, şi de pierderi economice în afară de cheltuieli pentru reparaţia motorului.
Suprasarcina de curent a MA trifazate însă poate fi condiţionată nu numai de creşterea cuplului de sarcină la arbore, ci şi de alte cauze:
din cauza creşterii timpului de pornire, care depinde de momentul de inerţie al maşinii de lucru;
din cauza micşorării tensiunii sau frecvenţei reţelei de alimentare; din cauza asimetriei tensiunilor de fază sau la dispariţia unei faze; din cauza numărului mare de porniri pe oră; din cauza înrăutăţirii ventilaţiei sau a creşterii temperaturii mediului ; din cauza unor defecţiuni mecanice (a sfărâmării rulmenţilor); din cauza alimentării cu tensiuni nesinusoidale.
Sarcina principală a dispozitivelor de protecţie (DP) constă în deconectarea motorului înainte ca temperatura lui să atingă valoare maximă, după care se micşorează rezistenţa izolaţiei, devenind periculoasă pentru o funcţionare normală. La baza acestor dispozitive pot sta mai multe principii sau tipuri de protecţie :
maximală de curent (de scurtcircuit); maximală şi minimală de tensiune, sau la dispariţia ei; protecţia la dispariţia unei faze; protecţia la suprasarcini la arbore, care atrage după sine şi suprasarcini
de curent (1,05 – 1,5)IN; protecţia la curenţi de scurgere la masă (corp), care apar la scăderea
rezistenţei de izolaţie sub o anumită limită; protecţia antiexplozivă (pentru lucrări în mine, unde predomină
amestecuri de gaze explozive);
12

protecţia climatică (contra influenţei factorilor climatici ai mediului ambiant cu temperaturi foarte ridicate sau scăzute, cu umiditate excesivă).
Dintre toate aceste protecţii cele mai principale sunt cele de curent maximal (scurtcircuit), de suprasarcini şi de dispariţie a unei faze. Suprasarcinile la arborele motorului conduc la o creştere lentă a curentului şi a temperaturii înfăşurărilor lui, de aceea acest tip de protecţie se mai numeşte şi protecţie termică, iar ea poate fi realizată prin 2 sau chiar 3 procedee sau metode:
1) prin măsurarea temperaturii înfăşurărilor (metoda directă); 2) prin măsurarea curentului (metoda indirectă);3) prin ambele metode.
Controlul direct al temperaturii se recomandă în următoarele cazuri: în regimurile cu funcţionare de scurtă durată(S2) sau intermitentă(S3),
când curentul poate depăşi valoarea nominală, iar temperatură – nu; în cazul unor porniri – frânări îndelungate (peste 10s); la o răcire insuficientă sau la o temperatură înaltă a mediului ambiant; la o alimentare nesinusoidală (de la convertoare de frecvenţă).
Pentru a controla temperatura reală a MA în înfăşurările lor se instalează, în calitate de senzori termici, nişte termorezistenţe sau termistoare
semiconductoare cu un coeficient pozitiv de temperatură (la
creşterea temperaturii motorului rezistenţa senzorului creşte proporţional şi invers). Această variaţie este transformată apoi de dispozitivul de protecţie ( DP) într – un semnal discret de declanşare a contactorului KM, care alimentează statorul motorului. Protecţia lui la scurtcircuit în aceste cazuri trebuie asigurată cu ajutorul întrerupătoarelor automate QF (fig. 1.6). Fig.1.6
DP bazate pe măsurarea reală a curentului motorului se realizează, la rândul lor, în 3 variante:
relee termice de protecţie cu 2 metale diferite şi lipite, care la încălzire se îndoaie, acţionând mecanic asupra unui contact electric;
relee electronice de protecţie, care compară valoarea reală a curentului cu cea prescrisă, acţionând când aceste valori devin egale.
Relee electronice de protecţie combinată, care controlează atât curentul, cât şi temperatura reală a motorului.
1.4.2 Dispozitive moderne de protecţie În figura 1.7,a este reprezentat releul termic 3RU al companiei Siemens şi
elementele lui de comandă. El are nişte ieşiri în variantă de şurub, iar intrările au forma unor fişe de o anumită lungime şi amplasate la o astfel de înălţime, încât să asigure o montare exactă împreună cu contactorul de comandă al
13

motorului (fig..7,b) . Fiecare releu termic se execută pentru un interval anumit de curent, de exemplu 1-1,6A, sau 2,5-4A şi aşa mai departe până la 100A. Alegerea valorii necesare a curentului nominal se efectuează cu ajutorul unui disc rotitor cu adâncitură în formă de cruce în centru. Releul este prevăzut cu 3 butoane : STOP - de culoare roşie, care asigură deconectarea contactorului fără acţionarea releului, butonul de testare TEST, ascuns sub un căpăcel de masă plastică, şi butonul de resetare manuală sau automată RESET după acţionarea lui.
Fig.1.7 Releul termic de protecţie a motoarelor 3RU al companiei Siemens (a) şi montarea lui într-un singur bloc cu contactorul corespunzător 3RT (b) În figura 1.8 sunt reprezentate nişte relee termice separate şi accesoriile de montare ale lor, produse de compania italiană Lovato Electric. În afară de protecţia la suprasarcină, aceste relee mai pot proteja motorul la dispariţia unei faze şi sunt prevăzute cu resetare manuală sau automată.
14

Fig. 1.8 Relee termice ale companiei Lovato Electric cu diferite accesorii O altă particularitate principală a acestor relee este diapazonul mare în curent al modificaţiilor lor - 0.09-420 A. La curenţi mari ele se conectează în circuitul secundar al transformatoarelor de curent (fig.1.9).
Fig.1.9 Reprezentarea în scheme electrice releelor termice cu variante de resetare diferită şi cu curenţi diferiţi, inclusiv şi cu transformatoare de curent
În figura 1.10,a este reprezentat o modificaţie mai nouă a unui releu termic, produs de aceeaşi companie Lovato Electric într-un singur bloc compact cu contactorul trifazat de comandă a motorului , iar în figura 1.10,b - protecţia termică clasică printr-un întrerupător automat., cuplat cu un contactor corespunzător. În figura 1.11 compania ABB propune o variantă de protecţie integrată, inclusiv la dispariţia unei faze şi la asimetria fazelor. într-un întrerupător automat, la care se mai adaugă doar contactorul.
15

a) b) Fig.1.10 Dispozitive de
protecţie clasică: a)-, cu releu termic–contactor şi întrerupător automat Fig.1.11 Protecţie integrată – contactor (LOvato Electric) în întrerupător automat ABB
În figura 1.12 sunt arătate o
grupă de relee electronice de protecţie la depăşirea valorilor maxime şi minime ale tensiunii, curentului,
frecvenţei, la dispariţia unei faze, la variaţia succesiunii fazelor, asimetriei lor, sensului de rotaţie a motorului ale companiei Lovato Electric. Releele de tensiune, de exemplu, sunt universale. deoarece includ mai multe protecţii – la dispariţia unei faze, la asimetria şi succesiunea lor. Unele dintre aceste protecţii acţionează momentan (la dispariţia fazei sau schimbarea succesiunii lor), iar altele - cu întârziere. În particular, dacă tensiunea unei faze a motorului devine mai mare sau mai mică faţă de valorile prescrise cu ajutorul potenţiometrelor, începe să licărească mai întâi indicatorul luminiscent roşu. Când durata acestor regimuri depăşeşte temporizările prescrise, releul deconectează contactorul, indicatorul roşu arde continuu, iar cel verde licăreşte.
Fig.1.12 Variante de relee de protecţie a motoarelor ale companiei Lovato
16

Dintre releele electronice de protecţie de tensiuni joase ale companiei Siemens pot fi menţionate relee 3RB10 (fig.1.13,a) cu un diapazon de control al curentului 0,4-630A (335kW), care sunt mult mai performante faţă de releele termice. Ele asigură un diapazon mult mai larg de prescriere a curentului: Ip=(0,25 – 1,0)IN adică 1:4, având o acţionare IA=1,14Ip – la fiecare valoare aleasă (prescrisă); o protecţie adăugătoare la dispariţia unei faze de alimentare a motorului cu un timp de acţionare până la 3s; un consum de energie mult mai mic. Un alt parametru al acestor relee este clasa de temporizare la pornirea motorului – 5, 10 şi 20. Această clasă subînţelege o temporizare respectivă de 5,10 sau 20 de secunde , necesare pentru a exclude acţionarea lor în timpul pornirii motorului, când curentul depăşeşte mult valoarea nominală. Releele 3RB10, la fel ca şi cele italiene, nu impun nici o sursă exterioară de alimentare în curent continuu +5V, întrucât se alimentează de la acelaşi sistem de tensiune pe care îl controlează şi protejează. Pentru aceasta releele 3RB10 includ 3 transformatoare de măsurare a curentului (TC) în fiecare fază şi un transformator de tensiune de putere mică (fig.1.13,b). Dispozitivul electronic conţine nişte circuite integrate analogice (microscheme), care compară curentul real din fiecare fază cu cel prescris şi în caz de depăşire formează un semnal discret de acţionare de tip releu cu CNI.
a) b) Fig.1.13 Releul electronic de
protecţie 3RB10 al companiei Siemens
Releele 3RB12 (Siemens) sunt înzestrate cu un dispozitiv electronic cu microprocesor, de aceea sunt mai performante decât 3RB10, asigurând mai multe funcţii de protecţie, inclusiv protecţie termică directă şi indirectă (combinată), precum şi funcţii de comandă, de
diagnostică. Pe lângă funcţiile releului precedent, acest releu asigură o protecţie la o asimetrie substanţială a tensiunilor (curenţilor) pe faze, la străpungerea izolaţiei faţă de corp (pământ), la blocarea mecanică a rotorului motorului şi la creşterea nemijlocită a temperaturii statorului, nu numai prin controlul indirect al curentului absolut de stator. Controlul direct al temperaturii motorului poate fi realizat de microprocesor, introducând în înfăşurarea statorică un termistor – o rezistenţă specială, care îşi schimbă valoarea la variaţia temperaturii.
17

Firma Siemens produce însă şi relee de protecţie separată: numai în funcţie de curent – de tipul 3UA6 şi numai în funcţie de temperatura motorului (sau a transformatoarelor) – de tipul 3RN1.
O altă protecţie principală a motoarelor asincrone este cea de străpungere a izolaţiei la corp (la pământ, dacă corpul este legat la pământ), numită şi protecţie la curent de scurgere. Ea este deosebit de importantă pentru motoarele cu funcţionare în aer liber sau în încăperi cu umiditate excesivă. În cazurile, când aceste motoare staţionează un timp mai îndelungat, are lor o micşorare a rezistenţei izolaţiei lor faţă de corp , Dacă aceasta din urmă scade până la o anumită valoare minimă, arunci în momentul conectării motoarelor ele ard definitiv. Protecţia de străpungere la corp se realizează în mai multe variante – cel mai des cu întrerupătoare automate diferenţiale, care vor fi analizate mai jos.
1.4.3. Întrerupătoare automate diferenţiale de protecţie la curenţi de scurgere la masă
Importanţa aceste întrerupătoare constă nu numai în protecţia motoarelor şi a altor utilaje electrice, izolate de pământ sau de nul, la apariţia curenţilor de scurgere la masă în cazurile înrăutăţirii izolaţiei lor faţă de corp, ci şi în protejarea organismului uman la atingerea lui de corpul motoarelor aflate sub tensiune. În plus această protejare are loc nu numai la atingerea corpului motoarelor aflate sub tensiune, ci la orice atingere de un conductor deschis aflat sub o anumită tensiune. În fiecare caz prin organismul uman trece un curent, care depinde de rezistenţa corpului şi de valoarea tensiunii şi care se închide prin pământ, în cazul sistemului de tensiune cu nul legat la pământ. Acest curent poate fi mic, însă pentru organismul uman un curent mai mare de 0,1 A este deja periculos. Rezistenţa interioară medie a organismului uman tânăr, de la mână spre picior, constituie aproximativ 1000-2000 Ω. Dacă picioarele nu sunt izolate de pământ, atunci la o tensiune de 230V prin organism poate să treacă un curent de 230 mA, ceea ce pentru un organism tânăr poate fi mortal. De aceea întrerupătoarele automate diferenţiale (IAD),destinate pentru protecţia electrocutării organismului uman, sunt prevăzute cu următoarele valori de prescriere ale curentului de scurgere: 10,30,100mA.
În cazul legării corpului motoarelor la nul sau la pământ, întrerupătoarele obişnuite le pot deconecta numai la o străpungere definitivă, când rezistenţa izolaţiei se micşorează până la zero, şi când curentul creşte până la valoarea de scurcircuit . În practică însă rezistenţa izolaţiei faţă de corp, în majoritatea cazurilor, nu scade brusc până la zero, ceea ce cauzează un curent de scurgere mult mai mic decât cel de scurcircuit, însă suficient deseori pentru a supraîncălzi conductoarele şi a provoca un incendiu. De aceea protecţia la curentul de scurgere la masă poate servi în plus ca şi o protecţie antiincendiară, Evident, că valorile curentului de prescriere al întrerupătoarelor diferenţiale pentru o astfel de protecţie pot fi mai mari faţă de protecţia organismului uman - 0,1-1,0A. În cazul, când curentul real de scurgere depăşeşte valoarea respectivă de prescriere,
18

IAD deconectează în mod automat, la fel ca şi întrerupătoarele automate obişnuite, circuitul de forţă al unui consumator, pe care-l protejează.
Valorile nominale ale curentului de forţă al întrerupătoarelor diferenţiale, produse industrial, coincid cu valorile standardizate ale curentului întrerupătoarelor automate obişnuite -16, 25,50,63, 100A (la cele ruseşti BД1 – 63(УЗО) sau AД12, AД14) şi 16, 25 – 224A (la cele germane Siemens 5SM1). Valorile nominale ale tensiunilor însă depind de numărul de faze ale instalaţiilor, care se protejează prin IAD. Din acest punct de vedere IAD se împart în 2 variante constructive principale (vezi foto BД1– 63 Fig.1.14,a):
1) cu 2 intrări şi 2 ieşiri de forţă (faza L şi nulul N) – pentru consumatori monofazaţi;
2) cu 4 intrări şi 4ieşiri de forţă (L1, L2, L3 şi n) – pentru instalaţii trifazate. Întrerupătoarele diferenţiale ruseşti BД1-63 nu pot asigura protecţia,
instalaţiilor la scurt circuit şi suprasarcină, de aceea utilizarea lor necesită o înseriere cu întrerupătoare automate obişnuite. În legătură cu aceasta au fost elaborate, de asemenea, nişte IAD combinate – AД12, AД–14(Fig. 1.14,b) sau 5SU3(6), care asigură toate protecţiile menţionate mai sus.
a) b)Fig.1.14 Întrerupătoare automate
diferenţiale ale companiei ruseşti ИЭК : a) – ВД1-63 cu protecţie numai la curent de scurgere la masă; b) – АД12, АД14 cu protecţie la curent de scurgere, la curent de scurcircuit şi la curent de suprasarcină
În figura 1.15 sunt reprezentate câteva modificaţii de ÎAD F200 şi DS ale companiei ABB cu aceleaşi 2 funcţii de protecţie. Valorile curentului prescrise
19

de scurgere ale lor sunt cuprinse între 0,1A şi 1,2A. Ele mai asigură , de asemenea, o temporizare reglabilă 0,3-5s pentru deconectare selectivă a 2 ÎAD.
Fig.1.15 Întrerupătoare automate diferenţiale DS ale companiei ABB
Principiul de funcţionare al IAD este relativ simplu, având la bază un transformator diferenţial cu circuit magnetic toroidal 1 (Fig.1.16). Prin fereastra interioară a acestui toroid se trec conductoarele curentului de forţă, care servesc ca înfăşurări primare de o singură spiră w1=1 ale transformatorului diferenţial. În variantă monofazată, de exemplu, curentul conductorului de fază I1 este egal cu curentul nulului , însă aceşti curenţi au sensuri diferite. Ca urmare, fluxurile magnetice Ф1 şi Ф2 , create de aceşti curenţi în miezul toroidal, de asemenea sunt egale şi opuse: Ф1 = Ф2 , iar fluxul rezultant: ФΣ =Ф1 - Ф2 = 0, ceea ce condiţionează în înfăşurarea secundară cu spire w2 o tensiune de inducţie e2 =0.
În cazul atingerii operatorului uman de un conductor neizolat, aflat sub tensiunea de fază, sau de corpul instalaţiei, izolaţia căreia este străpunsă, prin organismul uman, pământ şi faza de alimentare apare un curent adăugător, numit curent de scurgere la pământ Isc. Acest curent condiţionează un dezechilibru între curenţii (I1
+Isc) - I1 = I>0 şi fluxurile lor magnetice
Ф1 - Ф2 = Ф >0. Ca urmare, în circuitul secundarului transformatorului apare un curent I2 >0, care alimentează electromagnetul 2. Când acest curent atinge valoarea prescrisă I2 =Ip, are loc acţionarea electromagnetului 2, declanşarea mecanismului de zăvorâre 3 şi deconectarea automată a instalaţiei de la reţeaua de alimentare.
Pentru o testare imitatoare a funcţionării întrerupătorului
20

diferenţial este prevăzut un buton „Test” şi o rezistenţă anumită R, care pot forma un curent artificial de scurgere prin şuntarea transformatorului . Fig.1.16 Principiul de funcţionare al ÎAD
În mod analogic funcţionează şi varianta trifazată a întrerupătorului diferenţial, trecându-se prin fereastra miezului magnetic toate conductoarele de fază, inclusiv nudul reţelei. În lipsa curentului de scurgere, suma curenţilor
acestor conductoare, de asemenea, este egală cu zero: iL1 +iL2 +iL3 =0. În unele instalaţii însă forma acestor curenţi nu este sinusoidală, ceea ce necesită nişte modificaţii speciale ale IAD.
Notarea convenţională a ÎAD monofazate şi trifazate în schemele electrice include transformatorul toroidal şi butonul de testare înseriat cu rezistenţa de limitare a curentului de scurgere artificială (fig. 1.17).
Fig.1.1 7
Întrerupătoare automate diferenţiale şi notarea lor în schemele electrice
Toate întrerupătoarele descrise mai sus necesită o deblocare manuală în caz de acţionare, În cazurile, când dispozitivele protejate nu se află sub supraveghere, sau diferite semnale parazite condiţionează o acţionare falsă, pot fi utilizate întrerupătoare diferenţiale completate cu dispozitive adăugătoare de deblocare automată (fig.1.18). Ele resetează fiecare acţionare de câteva ori, după dorinţa utilizatorului.
21

Fig.1.18 Întrerupător diferenţial F370 cu deblocare automată ABB În afară de întrerupătoarele automate diferenţiale , companiile ABB şi
Lovato electric mai produc relee de protecţie la apariţia curentului de scurgere la masă. Aceste relee sunt concepute pentru a depista curentul de scurgere în cazul unor curenţi de linie mai mari, utilizând pentru aceasta un transformator toroidal exterior, prin fereastra căruia se trec conductoarele de putere. În figura 1.19 sunt arătate modificaţiile releelor de monitorizare a curentului de scurgere la masă R1D şi RMT ale companiei Lovato Electric. Modificaţiile lor sunt prevăzute pentru unul sau 2 semnale de prescriere a curentului de scurgere, cu o comandă locală sau la distanţă şi pentru curenţi de la 0,025A şi până la 250A, iar pentru o deconectare selectivă a 2 relee este prevăzută şi o temporizare în limitele 0,02-5s. La modificaţiile de curenţi mai mici transformatoarele toroidale sunt incorporate în interior. Contactele comutatoare de ieşire ale acestor relee se utilizează, de obicei, pentru deconectarea declanşatorului întrerupătorului automat de protecţie.
22

Fig.1.19 Relee de monitorizare a curentului de scurgere la masă Lovato Electric În figura 1,20,a este arătat un releu asemănător al companiei ABB, iar în figura 1.20,b - un transformator toroidal exterior, necesar pentru funcţionarea releului de protecţie.
Fig.1.20 Releu de control al curentului de scurgere la masă F370 ABB cu transformator toroidal exterior
Utilizarea practică ale acestor dispozitive de protecţie şi schemele lor de conexiune depind însă de modul de legare la pământ al reţelelor electrice de alimentare. În raport cu acest criteriu standardele europene şi ruseşti reglementează mai multe variante de reţele (sisteme) de alimentare, care se notează prin câteva litere. Prima din ele indică modul de conexiune a neutralei :
T - când neutrala-i legată direct la pământ (Terra); I - când neutrala este izolată de pământ.
A doua literă indică modul de conexiune al corpului instalaţiilor electrice: T - când corpul este legat la pământ, N - când corpul este conectat la
un conductor neutral de protecţie(PE), care poate fi separat de nul(TN-S) sau comun(TN-C).
23

În trecut se dădea prioritate sistemului de alimentare cu energie electrică TT (fig.1.21), în care corpul instalaţiilor electrice era legat printr-o şină metalică cu un electrod metalic înfipt în pământ. Însă acest sistem asigura o fiabilitate de protecţie scăzută din cauza înrăutăţirii sau ruperii contactului cu pământul. În plus la aceasta, în unele cazuri, cum ar fi clădirile cu multe etaje, legătura cu pământul era problematică. De acea utilizarea IAD în Fig.1.21 Sistemul de alimentare TT
cest sistem este obligatorie. Sistemul de alimentare TN –C, cu legare la un singur nul PEN (fig.1.22), asigură o fiabilitate de protecţie mai înaltă decât cel precedent, de aceea majoritatea consumatorilor în anii 1970 – 1990 au fost alimentaţi prin acest sistem. Însă în acest caz prin nulul comun PEN circulă atât curentul de sarcină monofazată, cât şi curentul de scurgere la corp în cazul străpungerii izolaţiei instalaţiei, ceea ce face insensibilă protecţia diferenţială de curent. De aceea instalarea întrerupătoarelor diferenţiale în sistemul TN – C nu este permisă, doar în cazuri de excepţie, conectând corpul instalaţiei la nulul PEN până la IAD.
Fig.1.22 Sistemul de alimentare TN-C Fig.1.23 Sistemul de alimentare TN-S
Cea mai înaltă fiabilitate şi siguranţă de protecţie o asigură sistemul TN – S, (fig.1.23) în care nulul N şi conductorul de protecţie PE sunt separaţi, iar acesta din urmă nu este trecut nici printr–un aparat de comutaţie. Un astfel de sistem în prezent este considerat ca standard, în care utilizarea întrerupătoarelor diferenţiale (Устройство защитного отключения - УЗО) este raţională şi obligatorie.
Ţinând cont de aceasta, sistemele vechi TN–C în prezent se modernizează parţial - numai în panourile de alimentare ale consumatorilor, în care conductorul comun PEN se divizează în 2 conductoare paralele: N – de sarcină şi PE – de protecţie (fig.1.24). Conform acestui sistem combinat TN–C–S, consumatorii monofazaţi cu corp metalic (plitele electrice, boilerele, cazanele) se alimentează printr-un cablu cu 3 conductoare izolate între ele.
24

Fig.1.24 Sistemul combinat TN-C-S Fig.1.25 Sistemul izolat de alimentare IT
Sistemul cu nul izolat de pământ IT (fig.1.25) este utilizat mai rar – doar pentru sarcini trifazate simetrice, de exemplu motoare asincrone, când se cere o izolare galvanică (electrică) adăugătoare a sistemului de forţă şi de comandă, care asigură o protecţie bună şi suficientă a organismului uman fără protecţie cu IAD.
Aşa dar, întrerupătoarele automate diferenţiale de monitorizare a curentului de scurgere la masă necesită o conectare specială. Aceste dispozitive sunt recomandate în prezent ca obligatorii în sistemele casnice de alimentare cu energie electrică încă dintr-un motiv. Ele mai permit o depistare a furturilor de energie electrică, când unii consumatori de energie monofazată unesc aparatele lor electrice numai la un conductor al contorului – la linia de fază respectivă. Al doilea conductor – nulul , ei îl unesc la corpul diferitor sisteme legate la nul, cum ar fi reţele termice de încălzire sau de aprovizionare cu apă şi altele. În astfel de cazuri o parte din curentul consumat nu trece prin contor, ceea ce conduce la un furt de energie electrică.
1.5. Scheme tipice de comandă secvenţială cu relee şi contactoare ale motoarelor de curent continuu
1.5.1. Principii generale de pornire
Comanda secvenţială a motoarelor de curent continuu (MCC) este relativ mai complicată decât comanda motoarelor asincrone în scurtcircuit. Aceasta se explică prin faptul, că MCC nu permit pornirea, frânarea şi inversarea, prin conectarea directă la reţeaua de alimentare din cauza şocurilor mari de curent, care pot provoca scânteieri puternice, sau chiar foc circular, pe colector şi sub perii. Şocurile de curent depind de diferenţa dintre tensiunea de alimentare U şi tensiunea contraelectromotoare a motorului , precum şi tensiunea de
25

autoinducţie a înfăşurării indusului , proporţională cu inductivitatea acestei înfăşurări: :
,
unde - rezistenţa sumară a circuitului indusului.Inductivitatea LI, este relativ mică, la fel ca şi constanta electromagnetică a
indusului , de aceea la pornire, când =0,, curentul atinge valori foarte mari: . Însă valoarea maximă
admisibilă de colector a curentului nu trebuie să depăşească .La inversare, când U 0, şocul de curent este şi mai mare.
Ca urmare, limitarea curentului dinamic i(t) al MCC constituie o problemă obligatorie, care poate fi rezolvată prin mai multe procedee. La o tensiune U=const, una din cele mai simple metode de limitare a şocurilor de
curent este introducerea unor rezistenţe suplimentare Rs în circuitul indusului:
,
unde se alege astfel, ca să asigure un cuplu de pornire Mp =KФ ip Ms.
Pentru a asigura un timp de pornire dorit, în practică se aleg, de obicei, câteva trepte de rezistenţe , care în procesul de acceleraţie trebuie şuntate cu ajutorul unor contactoare. Acest proces, de regulă, se automatizează cu ajutorul unor scheme tipice de comandă secvenţială, asemănătoare cu schemele tipice de pornire reostatică ale motorului asincron cu rotorul bobinat. Automatizarea se efectuează la rândul ei, pe baza unor anumite principii, de exemplu în funcţie de timp, de viteză sau tensiune electromotoare, sau de curent. Aceşti parametri, evident, trebuie controlaţi cu ajutorul unor relee corespunzătoare sau traductoare . În continuare vor fi analizate câteva scheme tipice de comandă secvenţială automatizată a motoarelor de curent continuu, bazate pe aceste principii.
1.5.2. Scheme tipice de comandă nereversibilă Una din cele mai simple scheme tipice de pornire reostatică a MCC într-o
singură treaptă şi în funcţie de timp este reprezentată în fig.1.26. Ea conţine contactorul principal de alimentare a indusului motorului KM1, contactorul de accelerare sau şuntare a rezistenţei de pornire KM2, releul electromagnetic de timp KT cu temporizare la deconectare, butonul SB1, „Start” şi butonul SB2 „Stop”. Alimentarea schemei se efectuează prin includerea întrerupătorului automat QF, în rezultatul căreia are loc excitarea motorului şi acţionarea releului electromagnetic de timp KT. Acesta din urmă, deconectează bobina contactorului KM2, pregătind astfel pornirea reostatică a motorului. Această pornire începe odată cu apăsarea butonului SB1 „Start”, când are loc acţionarea contactorului principal KM1. În acest moment contactul normal – închis al
26

contactorului KM1 întrerupe alimentarea bobinei KT, impunându-l să-şi înceapă temporizarea. Când această temporizare expiră, contactul normal-închis al releului KT alimentează bobina contactorului de accelerare KM2. Ca urmare, acest contactor şuntează rezistenţa de pornire, transferând motorul pe caracteristica sa naturală (CMN) (Fig. 1.26.b). Accelerarea acestuia, însoţită de micşorarea curentului şi a cuplului, are loc până la o viteză, când cuplul motorului devine egal cu cuplul de sarcină al maşinii de lucru.
Oprirea motorului se efectuează fără frânare electrică – printr-o deconectare simplă a lui, apăsând butonul SB2 STOP.
b)
Fig.1.26 Schema tipică de pornire reostatică în funcţie de timp şi într-o singură treaptă a motorului de curent continuu cu excitaţie independentă
Schema de pornire reostatică în 2 trepte şi în funcţie de tensiune electromotoare (viteză), precum şi de frânare dinamică reostatică în funcţie de timp este reprezentată în figura 1.27. Ca traductor de tensiune electromotoare (viteză) în această schemă serveşte însuşi indusul motorului, întrucât E0 =U - IRI U. De aceea bobinele contactoarelor de accelerare KM2 şi KM3 sunt conectate paralel cu indusul motorului, însă acordarea acţionării lor la diferite tensiuni se efectuează cu ajutorul potenţiometrelor R4 şi R5. reostatul R3 şi contactorul KM4 asigură frânarea dinamică a motorului, durata căreia este determinată de releul electromagnetic de timp KT.
27

Pornirea reostatică a motorului începe odată cu apăsarea butonului SB1„Start” şi acţionarea contactorului de alimentare a indusului KM1. Contactul normal–deschis auxiliar al acestui contactor alimentează concomitent bobina releului de timp KT, pregătindu–l astfel pentru temporizare în momentul de trecere în regim de frânare. În timpul accelerării motorului tensiunea de la bornele indusului creşte. Când această tensiune atinge valoarea de acţionare a bobinei contactorului KM2, are loc şuntarea primei trepte R1, iar apoi, după o accelerare ulterioară, acţionează în mod analogic contactorul KM3, care şuntează treapta R2.
Pentru trecerea în regim de frânare dinamică se apasă butonul SB2 „Stop”, care deconectează contactorul principal KM1. Contactul normal-închis al acestui acţionează concomitent contactorul KM4, care conectează indusul motorului la reostatul de frânare R3. După oprirea motorului releul de timp KT întrerupe alimentarea bobinei contactorului KM4 şi schema Fig.1.27 Schema de pornire reostatică în 2
revine în stare iniţială. trepte şi în funcţie de viteză şi frânare dinamică Schema tipică de pornire reostatică în funcţie de curent şi într – o singură
treaptă este reprezentată în fig.1.28. Controlul curentului se efectuează cu ajutorul releului de curent KA, care asigură împreună cu releul de tensiune KV comanda contactorului KM2. În momentul apăsării butonului SB1 şi acţionării contactorului principal KM1 valoarea curentului indusului este mare, ceea ce condiţionează acţionarea releului de curent KA şi deconectarea bobinei contactorului KM2. Inductivitatea bobinei releului de curent KA este mai mică decât inductivitatea bobinei releului de tensiune KV, de aceea acţionarea releului KV puţin întârzie faţă de acţionarea releului KA, ceea ce şi este necesar pentru a împiedica acţionarea contactorului KM2, în momentul iniţial. Acţionarea acestuia are loc abia după accelerarea motorului, micşorarea curentului indusului şi deconectarea releului KA, care, prin contactul său normal închis, alimentează bobina lui KM2. Acest contact este apoi şuntat de contactul auxiliar KM2, care asigură o autoalimentare a acestui contactor.
28

Fig. 1.28 Schema de pornire în funcţie de curent
1.5.3. Schema tipică de comandă reversibilă
Această schemă este reprezentată în figura 1.29. Pentru pornirea şi inversarea motorului contactele de forţă ale contactoarelor principale KM1 şi KM” formează o punte, în diagonala căreea este conectat indusul motorului. Acţionarea manuală a acestor contactoare este asigurată de butoanele SB1 „Sens direct” şi SB2 „Sens invers”, iar deconectarea lor prin butonul SB3 STOP.
Automatizarea pornirii reostatice, frânării prin contracurent şi inversării se efectuează cu ajutorul releelor de tensiune KV1, KV2 şi releului de timp KT , precum şi a contactoarelor de scurcircuitare KM3 şi KM4, a rezistenţelor de pornire R1 şi frânare R2.
Pornirea într-un sens sau altul are loc într-o singură treaptă (R1) n funcţie de timp. La apăsarea, de exemplu, a butonului SB1, acţionează contactorul KM1, care conectează indusul motorului la sursa de alimentare, cu ambele rezistenţe R1 şi R2 introduse, iar prin contactul său auxiliar KM1 pune în funcţiune releul de tensiune KV1. Ca urmare, căderea de tensiune pe rezistenţa R2 acţionează releul de timp KT pe o durată foarte scurtă de timp, deoarece contactul releului RV1 alimentează bobina contactorului KV3, ceea ce duce la scurcircuitarea rezistenţei de frânare R2 şi a releului KT. Acesta din urmă începe temporizarea pornirii şi accelerării reostatice cu un curent Ima
=U/(R1+RI) (fig,1.30). După ce această temporizare expiră, se închide contactul RT în circuitul bobinei RV4, ceea ce provoacă şuntarea rezistenţei R1 şi trecerea motorului pe caracteristica sa naturală.
29

Fig.1.29 Schema de pornire automatizată în funcţie de timp, frânare prin contracurent în funcţie de viteza de inversare a motorului de curent continuu
Pentru inversare şi frânare se apasă mai întâi butonul SB2. În rezultat contactoarele KM1,KM3, KM4 şi releul KVB1 se deconectează, iar contactorul KM2, dimpotrivă, se conectează, schimbând sensul curentului şi tensiunii indusului. Ca urmare motorul trece în regim de frânare prin contracurent în cadranul II cu un curent negativ Imax= (-U –E0)/ R1+R2) (fig.1.30) . În acest regim ambele rezistenţe R1 şi R2 rămân introduce datorită
faptului, că releul KV2 nu acţionează odată cu contactorul KM2, întrucât diferenţa de potenţial de la borne este foarte mică UKV2 = UA –E0 = 0. Acest
30

releu acţionează abea după ce frânarea se termină şi după ce viteza şi tensiunea electromotoare E0 devin aproape egale cu zero. În acest moment se alimentează din nou bobina contactorului KM3, care şuntează rezistenţa de frânare R2 şi releul KT. Acesta din urmă începe temporizarea accelerării reostatice R1 în sens invers şi în cadranul III, în mod analogic ca şi în cadranul I. După ce ea expiră, motorul trece pe caracteristica sa naturală inversă. Dacă se apasă din nou butonul SB1, procesul de frânare şi inversare se repetă, cu excepţia, că frânarea are deja loc în cadranul IV. Pentru oprirea motorului se apasă butonul SB3 STOP în momentul terminării procesului de frânare.
Fig.1.30 Caracteristici mecanice ale motorului de curent continuu la pornire, frânare şi inversare a vitezei
31