
Capitolul 5.doc
55
Capitolul 5 Prese mecanice cu manivela,cu simpla acţiune Cuprins 5.1. Aspecte generale şi clasificare 5.2. Analiza cinematică a preselor cu manivelă 5.3. Solicitarea mecanismului mişcării principale a preselor mecanice cu manivelă Referinţe bibliografice
-
Upload
gravedigga2kkk -
Category
Documents
-
view
105 -
download
4
description
Mupd
Transcript of Capitolul 5.doc
Capitolul 5
Prese mecanice cu manivela,cu simpla acţiune
Cuprins5.1. Aspecte generale şi clasificare5.2. Analiza cinematică a preselor cu manivelă5.3. Solicitarea mecanismului mişcării principale a preselor mecanice cu manivelăReferinţe bibliografice
5.1. Aspecte generale şi clasificare
Presele mecanice cu manivelă, cu simplă acţiune, sunt maşinile de prelucrat prin deformare cel mai frecvent cunoscute şi întâlnite. Sunt maşini de uz general, universale, utilizabile pentru o mare diversitate de operaţii de deformare plastică la rece. Se construiesc într-o gamă largă de tipodimensiuni şi având o diversitate de valori ale forţei disponibile la culisor.
Mecanismul mişcării principale al preselor cu manivelă (numit în mod curent "mecanism manivelă-bielă-culisor" sau "mecanism bielămanivelă"), cu simplă acţiune, este alcătuit din:
unul sau doi arbori cotiţi, cu maneton sau cu excentric; una, două sau patru biele; un organ executor numit culisor (sau "berbec").Mecanismul manivelă-bielă-culisor este un mecanism cu bare articulate, cu
autoîntoarcere, deplasarea culisorului realizându-se între două poziţii extreme cunoscute sub numele de "punct mort superior" (PMS) şi "punct mort inferior" (PMI). Mecanismul manivelă-bielăculisor poate fi de tip "sumă" sau de tip "diferenţă", caz în care maşina este antrenată din partea inferioară.
Dacă antrenarea se face prin două biele, atunci fie se utilizează un singur arbore principal cu două zone excentrice identice, fie se utilizează doi arbori identici, fiecare cu câte o singură zonă excentrică, dispuşi paralel şi cu legătură cinematică rigidă.
Dacă antrenarea se face prin patru biele, atunci se utilizează doi arbori identici, fiecare cu câte două zone excentrice identice, dispuşi paralel şi cu legătură cinematică rigidă.
Arborele principal se poziţionează fie paralel cu faţa frontală a maşinii, figura 5.1 a, fie perpendicular pe aceasta, figura 5.1 b.
a) b)
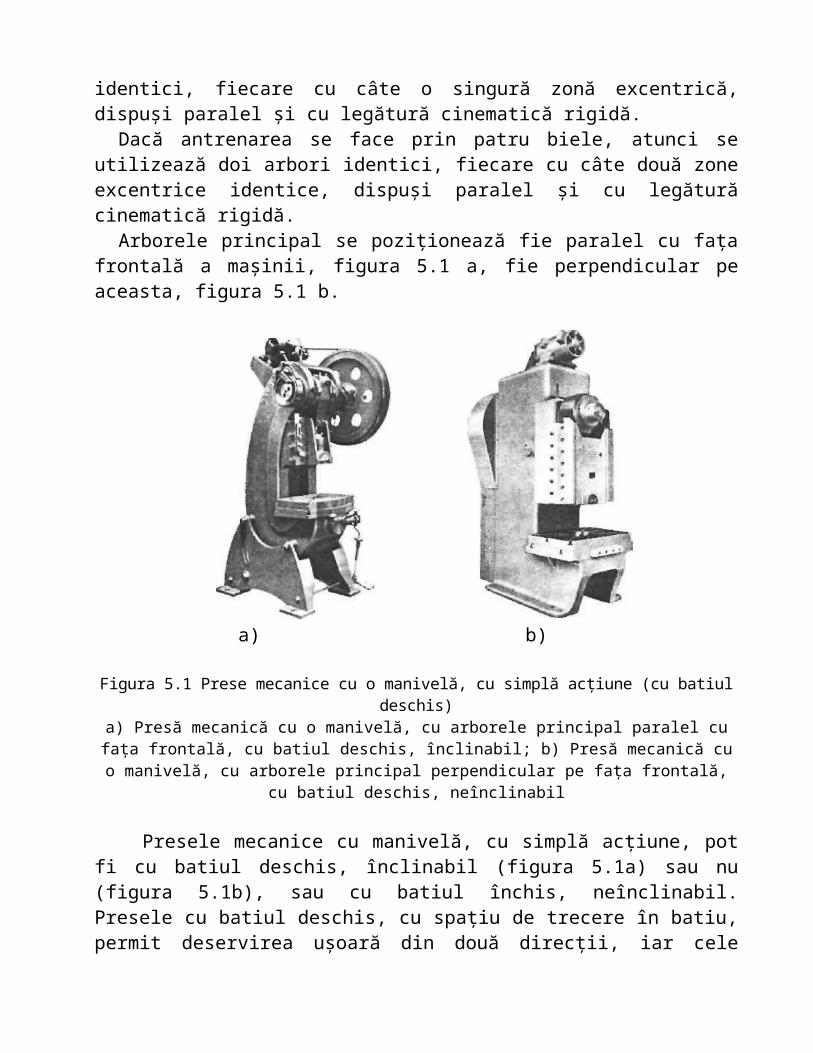
Figura 5.1 Prese mecanice cu o manivelă, cu simplă acţiune (cu batiul deschis)a) Presă mecanică cu o manivelă, cu arborele principal paralel cu faţa frontală, cu batiul deschis,
înclinabil; b) Presă mecanică cu o manivelă, cu arborele principal perpendicular pe faţa frontală, cu batiul deschis, neînclinabil
Presele mecanice cu manivelă, cu simplă acţiune, pot fi cu batiul deschis, înclinabil (figura 5.1a) sau nu (figura 5.1b), sau cu batiul închis, neînclinabil. Presele cu batiul deschis, cu spaţiu de trecere în batiu, permit deservirea uşoară din două direcţii, iar cele înclinabile permit evacuarea uşoară din spaţiul de lucru a pieselor şi/sau deşeurilor rezultate, prin cădere liberă pe plan înclinat [136].
Asigurarea traiectoriei rectilinii a mişcării principale se realizează cu ajutorul a două sau patru ghidaje fixate de batiu, în lungul cărora se deplasează culisorul presei.
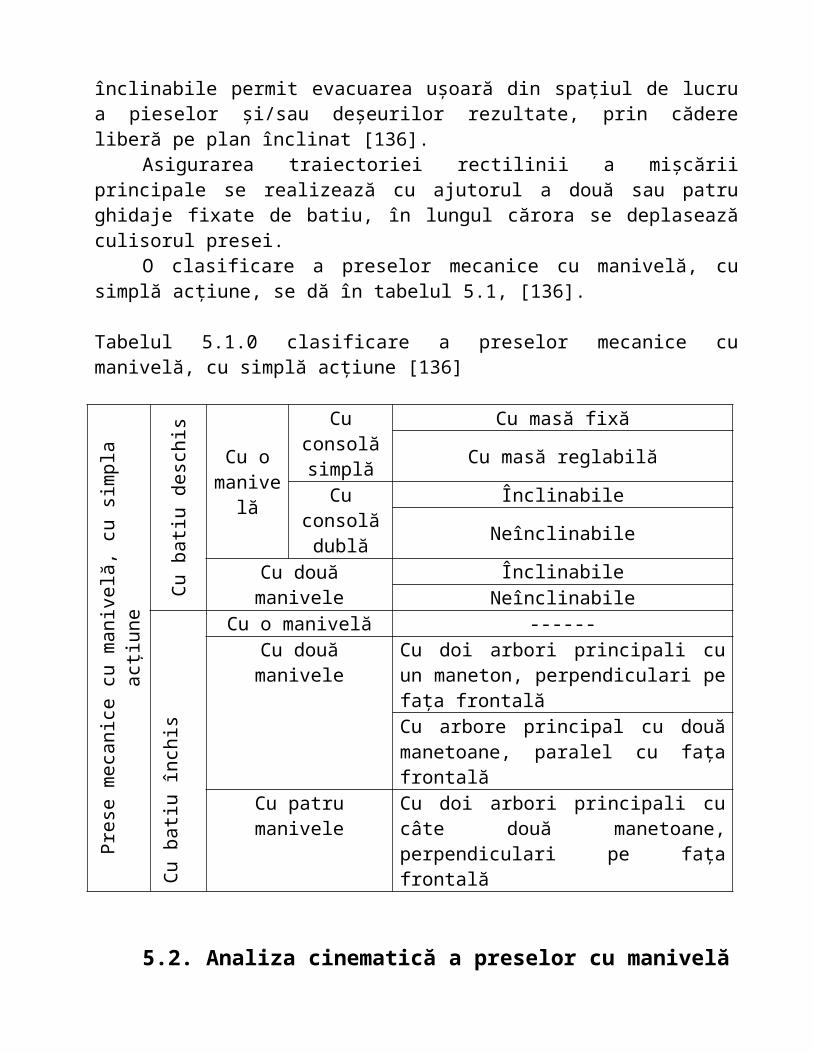
O clasificare a preselor mecanice cu manivelă, cu simplă acţiune, se dă în tabelul 5.1, [136].
Tabelul 5.1.0 clasificare a preselor mecanice cu manivelă, cu simplă acţiune [136]
Pre
se m
ecan
ice
cu m
aniv
elă,
cu
sim
pla
acţi
une C
u ba
tiu
desc
his Cu o
manivelă
Cu consolă simplă
Cu masă fixăCu masă reglabilă
Cu consolă dublă
ÎnclinabileNeînclinabile
Cu două maniveleÎnclinabile
Neînclinabile
Cu
bati
u în
chis
Cu o manivelă ------Cu două manivele Cu doi arbori principali cu un maneton,
perpendiculari pe faţa frontalăCu arbore principal cu două manetoane, paralel cu faţa frontală
Cu patru manivele Cu doi arbori principali cu câte două manetoane, perpendiculari pe faţa frontală
5.2. Analiza cinematică a preselor cu manivelă
Mecanismul manivelă-bielă-culisor de tip sumă, utilizat în marea majoritate a cazurilor, este reprezentat schematic în figura 5.2, în forma cea mai generală. Cazul general este cel la care există ''excentricitate'' (sau ''dezaxare"), adică atunci când axa lagărului O al arborelui antrenor al mecanismului şi axa articulaţiei B de legătură a bielei cu culisorul nu se află pe aceeaşi verticală.
Prin excentricitate - notată cu "e" - se înţelege în cazul de faţă distanţa dintre planul vertical (pentru cazul general, "plan paralel cu direcţia de deplasare a
culisorului") ce conţine axa arborelui principal (arborele cu excentric sau cu maneton) şi planul vertical, paralel cu cel anterior, ce conţine axa articulaţiei de legătură a bielei cu culisorul. Dacă faţă de planul ce conţine direcţia de deplasare a culisorului planul ce conţine axa arborelui principal se află de partea înspre care aceste se roteşte, atunci excentricitatea se consideră pozitivă; în caz contrar excentricitatea se consideră negativă.
La presele mecanice excentricitatea nu se reglează. Posibilitatea poziţionării pe direcţie orizontală a ghidajelor aplicate ce se întâlneşte la unele prese mecanice cu batiu deschis, cu arbore principal pe faţa frontală, nu urmăreşte reglarea excentricităţii, ci reglarea jocului în ghidaje.
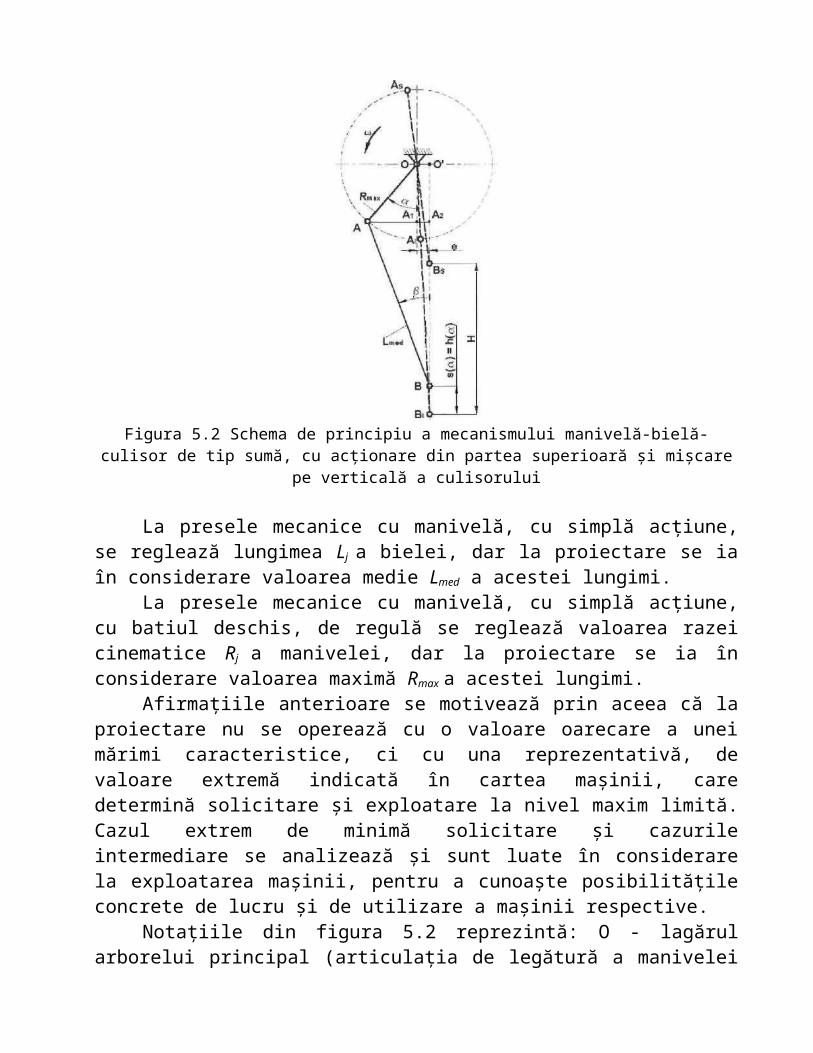
Figura 5.2 Schema de principiu a mecanismului manivelă-bielă-culisor de tip sumă, cu acţionare din partea superioară şi mişcare pe verticală a culisorului
La presele mecanice cu manivelă, cu simplă acţiune, se reglează lungimea Lj a bielei, dar la proiectare se ia în considerare valoarea medie Lmed a acestei lungimi.
La presele mecanice cu manivelă, cu simplă acţiune, cu batiul deschis, de regulă se reglează valoarea razei cinematice Rj a manivelei, dar la proiectare se ia în considerare valoarea maximă Rmax a acestei lungimi.
Afirmaţiile anterioare se motivează prin aceea că la proiectare nu se operează cu o valoare oarecare a unei mărimi caracteristice, ci cu una reprezentativă, de valoare extremă indicată în cartea maşinii, care determină solicitare şi exploatare la nivel maxim limită. Cazul extrem de minimă solicitare şi cazurile intermediare se analizează şi sunt luate în considerare la exploatarea maşinii, pentru a cunoaşte posibilităţile concrete de lucru şi de utilizare a maşinii respective.
Notaţiile din figura 5.2 reprezintă: O - lagărul arborelui principal (articulaţia de legătură a manivelei cu baza fixă); A - articulaţia de legătură dintre manivelă şi bielă,
aflată într-o poziţie oarecare; As, Ai - poziţiile extreme ale articulaţiei A, corespunzătoare poziţiilor PMS şi respectiv PMI ale culisorului; B - articulaţia de legătură dintre bielă şi culisor (acesta nefiind figurat), aflată într-o poziţie oarecare; Bs, Bi - poziţiile extreme ale articulaţiei B, corespunzătoare poziţiilor de PMS şi PMI ale culisorului; Rmax - raza maximă a manivelei; Lmed - lungimea medie a bielei; e - excentricitatea mecanismului; H - cursa maximă a culisorului; s(α) = h(α) - cota curentă a poziţiei culisorului faţă de poziţia sa de punct mort inferior; α - unghiul de poziţie curent al manivelei (unghiul dintre verticala ce trece prin O şi direcţia curentă OA a manivelei); β – unghiul poziţiei curente a bielei (unghiul dintre direcţia de deplasare a culisorului şi direcţia curentă AB a bielei).
Se utilizează notaţiile:λ = R/L - coeficientul de bielă (λ0 = Rmax/Lmed - coeficient utilizat la proiectare; λi = Ri /Lj, - coeficient corespunzător unor valori Ri şi Lj oarecare, întâlnite în diferite situaţii practice de exploatare a maşinii).
În cazul preselor mecanice domeniul recomandat este 1/20 ≤ λ0 ≤ 1/4;k = e/R - coeficientul excentricităţii (k0 = s/Rmax - coeficient utilizat la proiectare; ki = e/Ri - coeficient corespunzător unor valori Ri oarecare, întâlnite în diferite situaţii practice de exploatare a maşinii).
Literatura [136] precizează că se pot adopta valori în domeniul k= ±(0...1,3), dar că domeniul recomandat este k = ± (0 ... 0,5).
Expresia de spaţiu a mecanismului manivelă-bielă-culisor se defineşte a fi expresia analitică a distanţei dintre poziţia curentă a unui punct caracteristic al elementului executor (se ia, de regulă, centrul B al articulaţiei de legătură cfintre bielă şi culisor) şi poziţia extremă a aceluiaşi punct corespunzătoare sfârşitului cursei active a culisorului:
(5.1)Din triunghiul ΔOO'BI rezultă:
22max
22 )('' eLROOOBBO medII (5.2)
Segmentul O'B este dat de suma proiecţiilor pe direcţia de deplasare a culisorului (verticală în cazul de faţă) a manivelei Rmax şi a bielei Lmed:
(5.3)Prin înlocuirea relaţiilor (5.2) şi (5.3) în (5.1) se obţine expresia de spaţiu, neliniarizată, ce descrie mişcarea culisorului unei prese mecanice cu manivelă:
(5.4)Se are în vedere faptul că unghiul β este dependent de unghiul de poziţie a conform relaţiei:
(5.5)care permite a scrie succesiv:
(5.6)
obţinându-se în final că (5.7)
Relaţia (5.4) coroborată cu relaţia (5.7) permite calculul cu mare acurateţe, utilizând mijloace electronice de calcul, a valorilor de spaţiu oarecare. Implicit se determină, de exemplu, valorile corespondente ale distanţei dintre suprafaţa inferioară a poansonului şi o suprafaţă de referinţă a părţii inferioare, fixă, a sculei.
Operarea cu relaţii neliniarizate şi neomogene, dependente de mai mulţi parametri, este dificilă şi ori de câte ori este posibil se caută liniarizarea şi simplificarea acestora, chiar dacă forma obţinută conţine mici (dar acceptabile !) aproximaţii. Se prezintă în continuare forma liniarizată utilizată în mod tradiţional pentru expresia de spaţiu ce caracterizează presele mecanice cu manivelă, precum şi etapele de obţinere a acesteia. Modul de liniarizare a expresiei de spaţiu a mecanismului manivelă-bielă-culisor constituie un model de abordare pentru expresii similare determinate pentru alte mecanisme de transmitere şi de transformare a mişcării.
Radicalul din expresia (5.4) se liniarizează prin dezvoltare în serie Mac-Laurin (caz particular pentru serie-Taylor) [160]:
- serie Mac-Laurin; (5.8)
- serie Taylor, (5.9)
şi reţinerea doar a primilor doi termeni:
(5.10)Pentru demonstraţie se poate consulta, de exemplu, lucrarea [1].Se poate uza şi de faptul că, dacă b « a, atunci un termen de forma (b2/2a)2 ≈ 0
şi se poate neglija, deci se poate scrie că:
(5.11)
Ca urmare, deoarece e « Rmax + Lmed, se poate scrie că:
(5.12)
expresie identică cu (5.10).Termenul drept din relaţia (5.12) se scrie, în mod tradiţional, doar în funcţie de
Rmax şi punând în evidenţă coeficienţii k0 şi λ0. Pentru aceasta se tine seama că
(5.13)
şi că
(5.14)
astfel încât, în final, se obţine
(5.15)
Liniarizarea expresiei (5.4) presupune şi exprimarea lui cosβ în funcţie de unghiul curent α:
(5.16)
şi liniarizarea radicalului (prin dezvoltare în serie Mac-Laurin, relaţia (5.8), sau făcând apel la aproximarea (5.11)):
(5.17)
Mai mult chiar, se liniarizează şi sin2α, utilizând relaţia trigonometrică
cunoscută:
(5.18)
Înlocuind expresiile (5.10), (5.12), (5.15), (5.17) şi (5.18) în relaţia (5.4) se obţine succesiv:

(5.19)
Ţinând cont că:
(5.20)
prin înlocuire în (5.19) se obţine expresia liniarizată finală de spaţiu a cursei culisorului preselor mecanice cu manivelă:
(5.21)
O reprezentare grafică a expresiei (5.21) se dă în figura 5.4 (p. 221), împreună cu graficele de viteză şi acceleraţie.
Deşi este evident, trebuie precizat că poziţiile extreme PMI şi PMS ale culisorului, în cazul în care acesta este antrenat printr-un mecanism manivelă-bielă-culisor cu excentricitate, nu se obţin pentru valorile 0° şi respectiv 180° ale unghiului de poziţie α al manivelei. Aceste unghiuri au valorile (în radiani):
(5.22)
şi respectiv
(5.23)
Lungimea totală a cursei culisorului este şi are valoarea:
(5.24)
S-a utilizat pentru obţinerea acestei expresii aproximarea precizată prin relaţia (5.12), precum şi relaţia (5.15).
Concluzia este că, pentru valori Lmed şi Rmax precizate, valoarea minimă a cursei culisorului se obţine dacă excentricitatea mecanismului manivelă-bielă-culisor este nulă (e = 0 => k0 = 0), caz în care H = 2Rmax.
Într-o altă abordare, pentru determinarea expresiei de spaţiu a culisorului se poate face apel la metoda conturului vectorial închis.
Pentru o poziţie oarecare a mecanismului manivelă-bielă-culisor, figura 5.3, mărimilor liniare Rmax, Lmed , X şi Y= e li se asociază vectorii unitari
şi fiind vectorii unitari asociaţi ordonatei şi abscisei.
Figura 5.3 Asocierea de vectori unitori mărimilor caracteristice ale mecanismului manivelă-bielă-culisor de tip suma, cu acţionare din partea superioară şi mişcare pe verticală a culisorului, în
vederea determinării expresiei de spaţiu prin metoda conturului vectorial închis
În formă matriceală se poate scrie:
. (5.26)
Ecuaţia vectorială este:. (5.27)
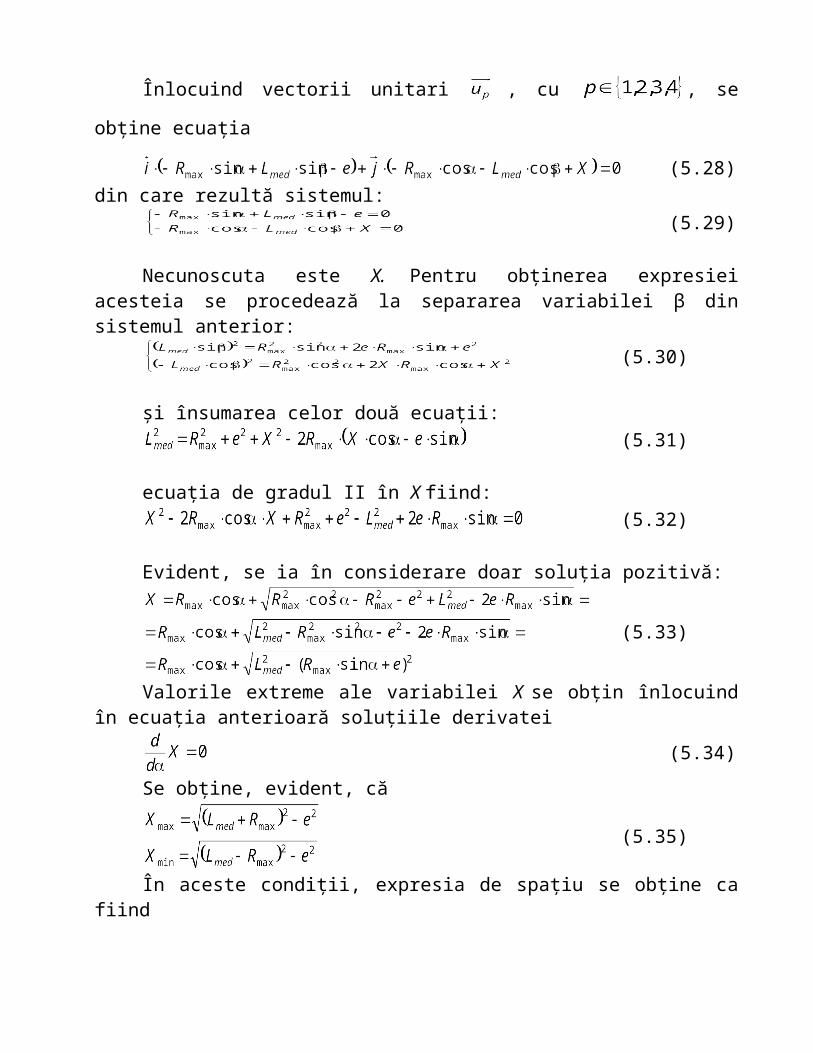
Înlocuind vectorii unitari , cu , se obţine ecuaţia
(5.28)din care rezultă sistemul:
(5.29)
Necunoscuta este X. Pentru obţinerea expresiei acesteia se procedează la separarea variabilei β din sistemul anterior:
(5.30)
şi însumarea celor două ecuaţii:(5.31)
ecuaţia de gradul II în X fiind:(5.32)
Evident, se ia în considerare doar soluţia pozitivă:
(5.33)
Valorile extreme ale variabilei X se obţin înlocuind în ecuaţia anterioară soluţiile derivatei
(5.34)
Se obţine, evident, că
(5.35)
În aceste condiţii, expresia de spaţiu se obţine ca fiind
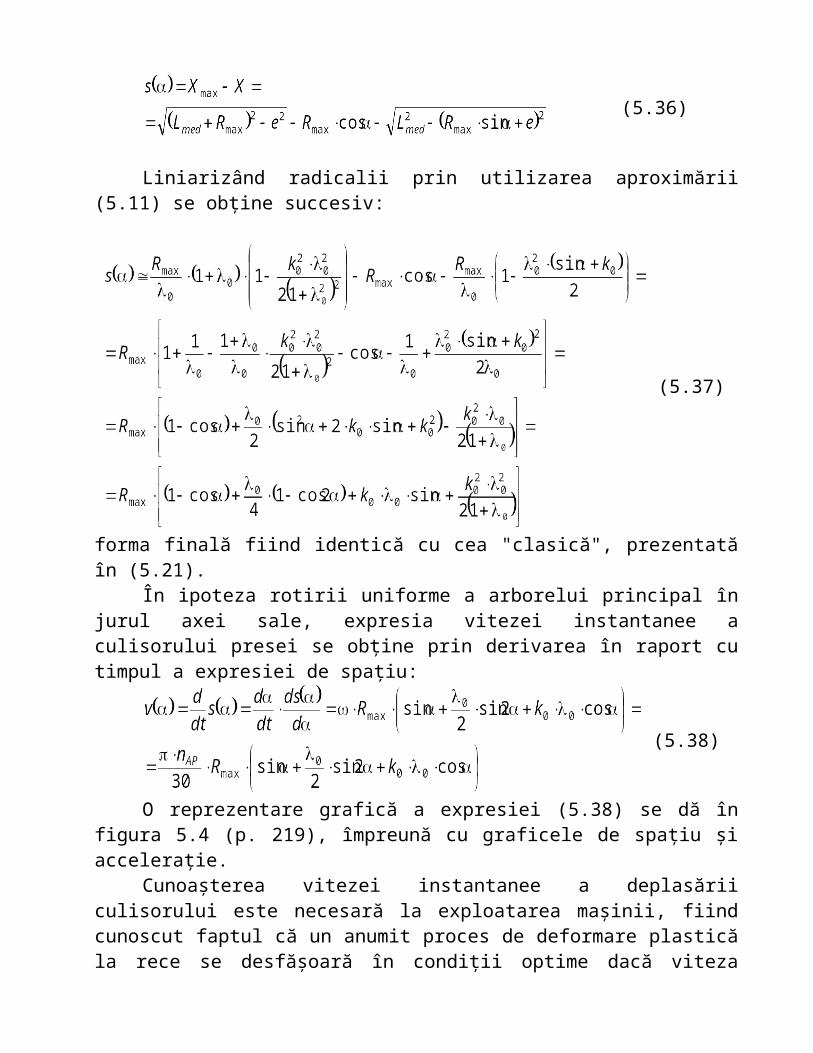
(5.36)
Liniarizând radicalii prin utilizarea aproximării (5.11) se obţine succesiv:
(5.37)
forma finală fiind identică cu cea "clasică", prezentată în (5.21).În ipoteza rotirii uniforme a arborelui principal în jurul axei sale, expresia
vitezei instantanee a culisorului presei se obţine prin derivarea în raport cu timpul a expresiei de spaţiu:
(5.38)
O reprezentare grafică a expresiei (5.38) se dă în figura 5.4 (p. 219), împreună cu graficele de spaţiu şi acceleraţie.
Cunoaşterea vitezei instantanee a deplasării culisorului este necesară la exploatarea maşinii, fiind cunoscut faptul că un anumit proces de deformare plastică la rece se desfăşoară în condiţii optime dacă viteza relativă dintre sculă şi piesă (atât cea "medie", dar mai ales cea "maximă" - cea corespunzătoare momentului realizării contactului dintre piesă şi partea mobilă a sculei, denumită "viteză de început de presare") are o anumită valoare.
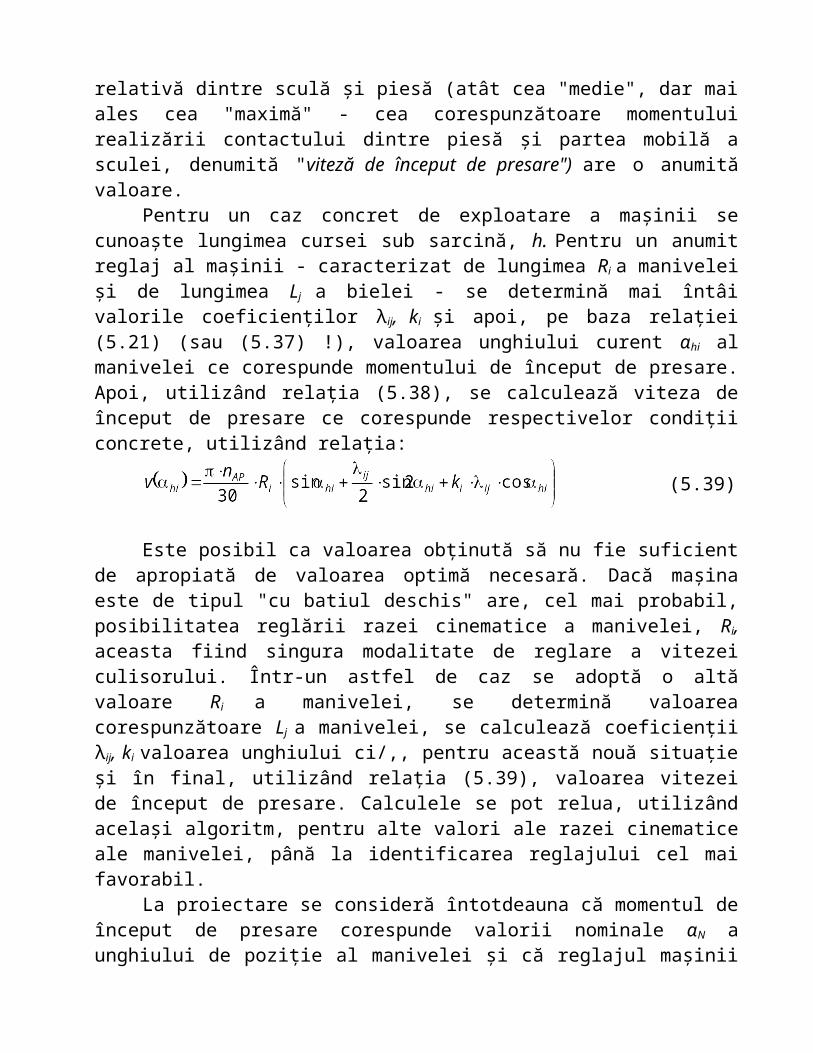
Pentru un caz concret de exploatare a maşinii se cunoaşte lungimea cursei sub sarcină, h. Pentru un anumit reglaj al maşinii - caracterizat de lungimea Ri a manivelei şi de lungimea Lj a bielei - se determină mai întâi valorile coeficienţilor λ ij, ki şi apoi, pe baza relaţiei (5.21) (sau (5.37) !), valoarea unghiului curent αhi al manivelei ce corespunde momentului de început de presare. Apoi, utilizând relaţia (5.38), se calculează viteza de început de presare ce corespunde respectivelor condiţii concrete, utilizând relaţia:
(5.39)
Este posibil ca valoarea obţinută să nu fie suficient de apropiată de valoarea optimă necesară. Dacă maşina este de tipul "cu batiul deschis" are, cel mai probabil,
posibilitatea reglării razei cinematice a manivelei, Ri, aceasta fiind singura modalitate de reglare a vitezei culisorului. Într-un astfel de caz se adoptă o altă valoare Ri a manivelei, se determină valoarea corespunzătoare Lj a manivelei, se calculează coeficienţii λij, ki valoarea unghiului ci/,, pentru această nouă situaţie şi în final, utilizând relaţia (5.39), valoarea vitezei de început de presare. Calculele se pot relua, utilizând acelaşi algoritm, pentru alte valori ale razei cinematice ale manivelei, până la identificarea reglajului cel mai favorabil.
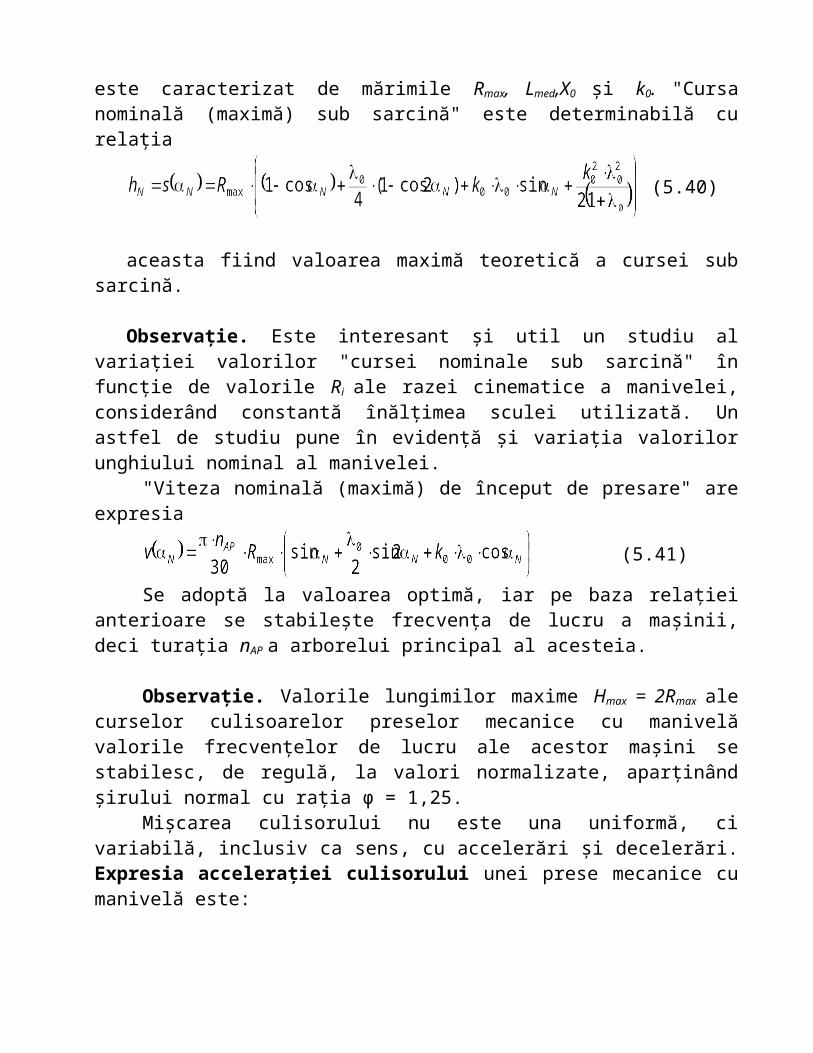
La proiectare se consideră întotdeauna că momentul de început de presare corespunde valorii nominale αN a unghiului de poziţie al manivelei şi că reglajul maşinii este caracterizat de mărimile Rmax, Lmed,X0 şi k0. "Cursa nominală (maximă) sub sarcină" este determinabilă cu relaţia
(5.40)
aceasta fiind valoarea maximă teoretică a cursei sub sarcină.
Observaţie. Este interesant şi util un studiu al variaţiei valorilor "cursei nominale sub sarcină" în funcţie de valorile Ri ale razei cinematice a manivelei, considerând constantă înălţimea sculei utilizată. Un astfel de studiu pune în evidenţă şi variaţia valorilor unghiului nominal al manivelei.
"Viteza nominală (maximă) de început de presare" are expresia
(5.41)
Se adoptă la valoarea optimă, iar pe baza relaţiei anterioare se stabileşte frecvenţa de lucru a maşinii, deci turaţia nAP a arborelui principal al acesteia.
Observaţie. Valorile lungimilor maxime Hmax = 2Rmax ale curselor culisoarelor preselor mecanice cu manivelă valorile frecvenţelor de lucru ale acestor maşini se stabilesc, de regulă, la valori normalizate, aparţinând şirului normal cu raţia φ = 1,25.
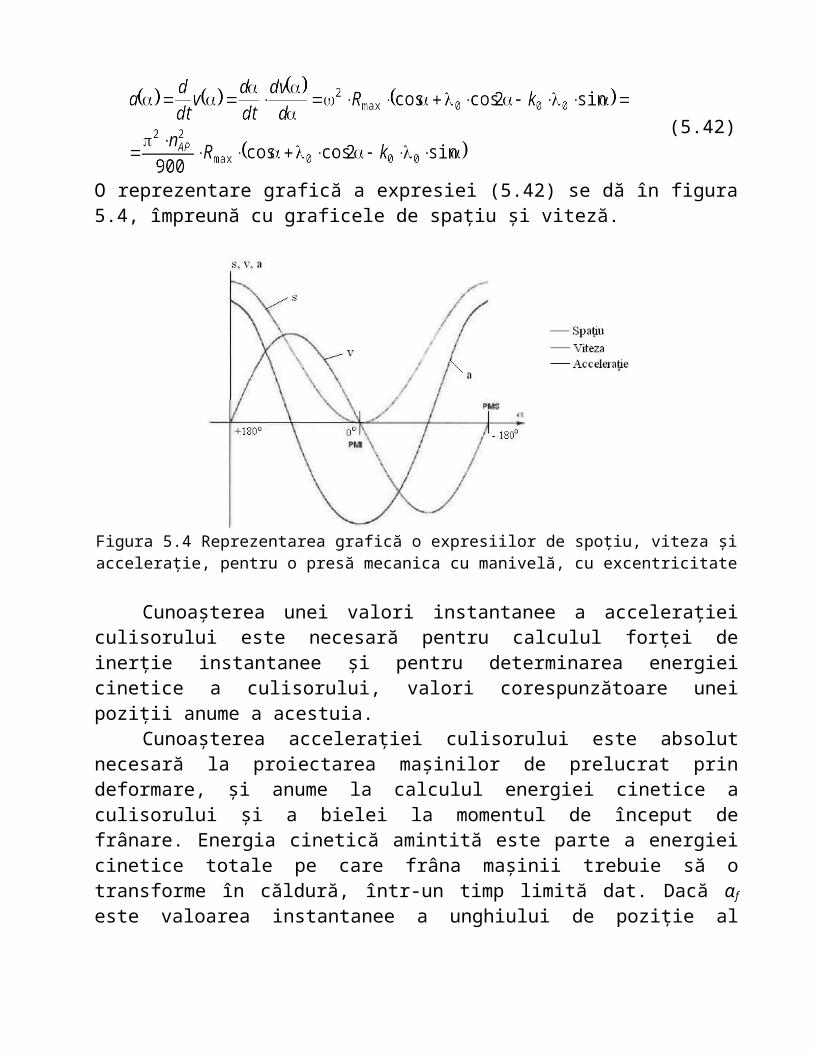
Mişcarea culisorului nu este una uniformă, ci variabilă, inclusiv ca sens, cu accelerări şi decelerări. Expresia acceleraţiei culisorului unei prese mecanice cu manivelă este:
(5.42)
O reprezentare grafică a expresiei (5.42) se dă în figura 5.4, împreună cu graficele de spaţiu şi viteză.
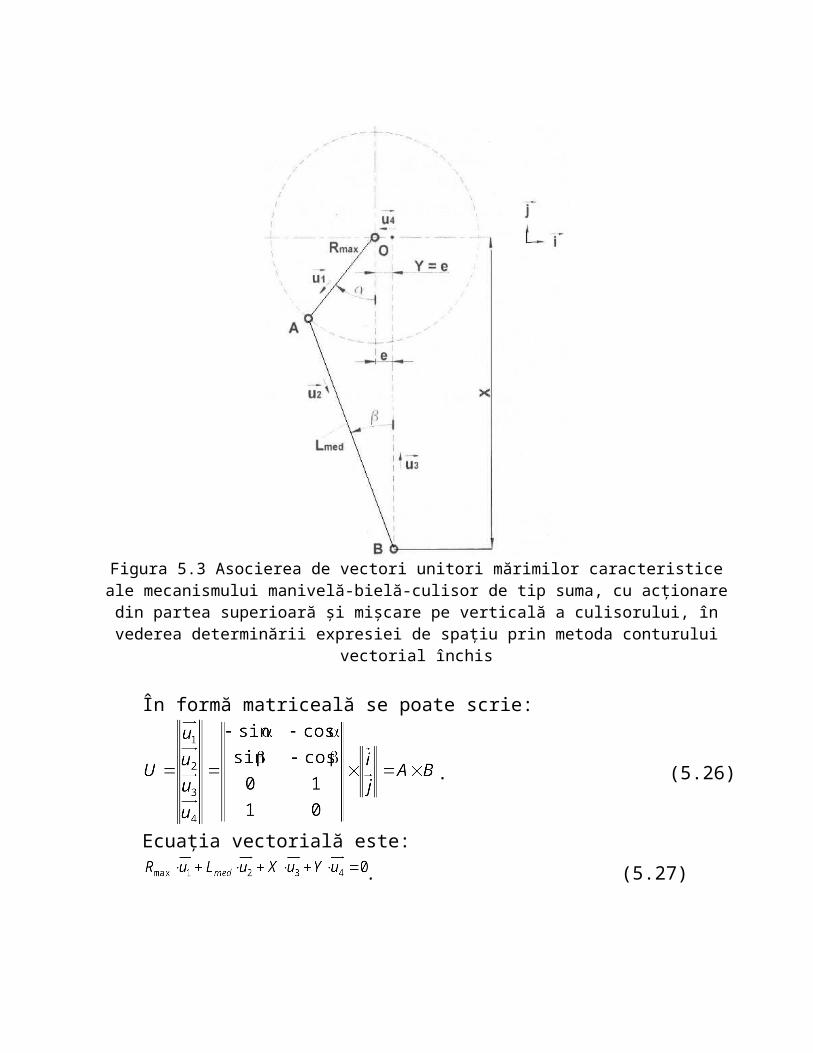
Figura 5.4 Reprezentarea grafică o expresiilor de spoţiu, viteza şi acceleraţie, pentru o presă mecanica cu manivelă, cu excentricitate
Cunoaşterea unei valori instantanee a acceleraţiei culisorului este necesară pentru calculul forţei de inerţie instantanee şi pentru determinarea energiei cinetice a culisorului, valori corespunzătoare unei poziţii anume a acestuia.
Cunoaşterea acceleraţiei culisorului este absolut necesară la proiectarea maşinilor de prelucrat prin deformare, şi anume la calculul energiei cinetice a culisorului şi a bielei la momentul de început de frânare. Energia cinetică amintită este parte a energiei cinetice totale pe care frâna maşinii trebuie să o transforme în căldură, într-un timp limită dat. Dacă αf este valoarea instantanee a unghiului de poziţie al manivelei la care începe acţiunea frânei [42], αf = α0
F AP + αS , atunci acceleraţia din acel moment a culisorului este:
(5.43)
Expresiile (5.40), (5.41) şi (5.42) corespund acelui reglaj al maşinii caracterizat de lungime maximă Rmax a manivelei şi lungime medie Lmed a bielei, situaţie ce se ia în considerare la proiectare. Pentru reglaje oarecare ale maşinii, caracterizate de Ri şi Rj
implicit de coeficienţii λij, şi kj, expresiile de spaţiu, viteză şi acceleraţie sunt:
(5.44)
(5.45)
(5.46)
5.3. Solicitarea mecanismului mişcării principale a preselor mecanice cu manivelă
În timpul funcţionării maşinii, în mecanismul mişcării principale se dezvoltă forţe şi momente de torsiune. Valorile acestora sunt dependente, evident, de mărimea forţei rezistente opusă de semifabricat. Aceasta are valori semnificative doar în timpul cursei sub sarcină, ceea ce motivează studiul solicitării mecanismului mişcării principale doar pentru poziţii particulare ale sale. Pentru o aceeaşi maşină forţa rezistentă este variabilă în timpul unei curse sub sarcină şi variabilă de la un proces la altul. De aceea, la stabilirea nivelului de solicitare a mecanismului mişcării principale este de preferat a se lua în considerare forţa nominală FN, care reprezintă valoarea maxim admisă a forţei rezistente, şi poziţia unghiulară a mecanismului corespunzătoare momentului teoretic de început de presare, adică unghiul nominal αN, poziţie care corespunde celei mai mari valori a momentului de torsiune rezistent. Pentru generalitate se ia în considerare, forţa disponibilă FD, care reprezintă valoarea instantanee maxim admisă a forţei rezistente, şi o poziţie unghiulară oarecare α. A se reţine totuşi că FD ≤ FN indiferent de valoarea unghiului de poziţie al manivelei mecanismului.
Studiul solicitării mecanismului mişcării principale se face luând sau nu în considerare frecările din cuplele acestuia. Neluarea în considerare a frecărilor este echivalentă cu un studiu "în condiţii ideale": ipotezele de lucru sunt simplificatoare, modelul de calcul este mai puţin complex, relaţiile cu care se operează sunt mai simple, dar abaterea faţă de fenomenul real este deseori mare. Luarea în considerare a frecărilor înseamnă un studiu „în condiţii reale" şi determină un model de calcul şi relaţii mai complexe, dar care descriu mult mai bine realitatea.
5.3.1. Solicitarea cu forţe a mecanismului mişcării principale a preselor mecanice cu manivelă, în condiţii ideale
În condiţii ideale, forţele ce solicită mecanismul manivelă-bielă-culisor se orientează în lungul barelor acestuia, figura 5.5.
Considerând pentru un unghi oarecare a, conform celor precizate anterior, că (Fr)max = (Ft)max = FD forţele ideale ce se manifestă în mecanismul manivelă-bielă-culisor sunt: Fb - forţa din bielă; Fn – forţa normală pe ghidajele culisorului; FT - forţa tangentă la manivelă; FR- forţa orientată în lungul manivelei, şi au expresiile:
(5.47)
Forţele Fb, Fn şi FT sunt maxime atunci când FD ≡ FN:
(5.48)
Figura 5.5 Forţele din monivelă – bielă culisor, în condiţii ideale
Forţa FR este maximă când α = 0 şi are valoarea FR ≡ FN.
5.3.2. Momentul ideal la manivelă
Momentul de torsiune se exprimă ca produs între forţă şi braţul acesteia. Având în vedere reprezentarea din figura 5.5, momentul ideal rezistent maxim la manivelă are expresia
(5.49)
În mod curent se utilizează o expresie liniarizată a relaţiei (5.49).Pentru aceasta se face aproximarea cosβ = 1, iar termenul sin(α + β), ţinând
cont de relaţia (5.6), se pune sub forma:
(5.50)
Având în vedere acestea, relaţia (5.49) poate fi pusă sub forma
(5.51)
în care bid este braţul (ideal al) forţei.Expresia "nominală" a braţului ideal al forţei nominale este
(5.52)
Braţul ideal al forţei disponibile se poate exprima şi sub forma
(5.53)
Ţinând cont şi de relaţia (5.38), care poate fi pusă sub forma
(5.54)
expresia (5.51) a momentului ideal la manivelă respectă relaţia teoretică generală [159] dintre forţă, moment de torsiune, viteză de translaţie şi viteză unghiulară:
(5.55)
În funcţie de structura mecanismului utilizat la presele mecanice cu manivelă pot apare situaţiile:
- un element de intrare (o singură manivelă) şi un element de ieşire (un singur culisor), caz care corespunde preselor comune cu o singură manivelă;
- două elemente de intrare (doi arbori principală) şi un element de ieşire (un singur culisor) (a se vedea şi figurile 5.16 şi 5.17);
- un element de intrare şi mai multe elemente de ieşire (culisoare) (prese cu un singur arbore principal şi mai multe culisoare).
Pentru cazul general, când maşina are ki elemente de intrare (ki arbori principali) şi ke elemente de ieşire (ke culisoare), cel puţin pentru momentul ideal la manivelă este valabilă relaţia:
(5.56)
Dacă elementele de ieşire au aceeaşi expresie a spaţiului, atunci
(5.57)
Dacă mecanismul manivelă-bielă-culisor al presei permite reglarea excentricităţii Ri a manivelei şi lungimea Lj a bielei, atunci relaţia (5.51) se poate pune sub forma generală
(5.58)
Momentul de torsiune rezistent maxim admis la arborele principal este o mărime constantă şi egală cu momentul de torsiune antrenor maxim admis. Momentul de torsiune rezistent maxim admis se exprimă în funcţie de un unghi curent oarecare al manivelei şi de forţa disponibilă, indiferent de reglajul concret al maşinii. Un caz particular - cum ar fi cel corespunzător unghiului nominal, forţei nominale, razei maxime a manivelei şi lungimii medii a bielei - nu modifică caracterul constant al momentului de torsiune maxim admis. Mai mult chiar, noţiunea de "forţă disponibilă" exprimă capacitatea maşinii de a dezvolta la arborele o anumită valoare maximă limită constantă a momentului de torsiune, (Mt) = ct., iar expresia analitică a forţei disponibile rezultă tocmai din această calitate. Dacă referirea se face la momentul de torsiune ideal, atunci din egalitatea
(5.59)
rezultă expresia forţei disponibile în condiţii ideale:
(5.60)
În expresia (5.60) numărătorul este constant, iar numitorul este variabil prin unghiul α. Ca urmare graficul forţei disponibile va avea forma unei parabole, care intersectează valoarea forţei disponibile în punctul ce corespunde unghiului nominal αN. O reprezentare grafică a forţei disponibile ideale se dă în figura 5.8.
5.3.3. Solicitarea cu forţe a mecanismului mişcării principale a preselor mecanice cu manivelă, în condiţii reale
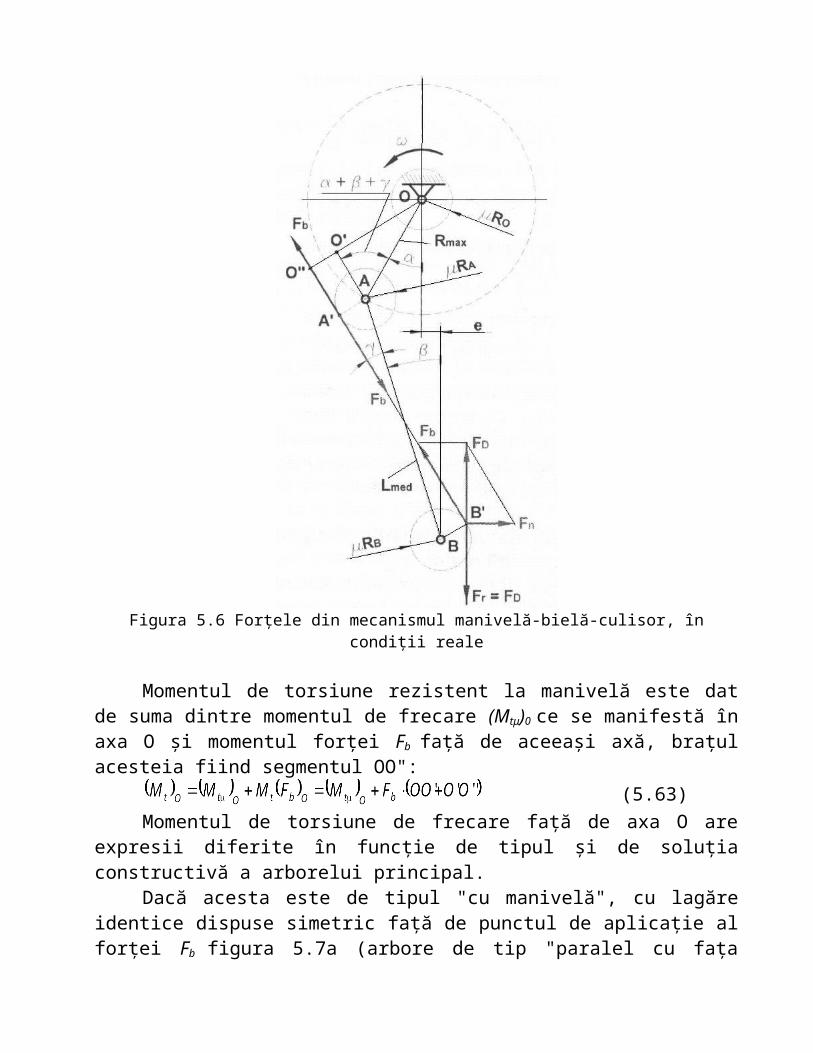
În condiţii reale, forţele ce solicită mecanismul manivelă-bielă-culisor se orientează nu în lungul barelor acestuia, ci tangent la "cercurile de frecare" aferente articulaţiilor mecanismului, figura 5.6.
Într-o articulaţie, cilindrică sau sferică, ca urmare a forţei radiale Frad ce solicită articulaţia apare o forţă de frecare Fμ - orientată tangent la suprafaţa de separaţie a componentelor articulaţiei, la raza R faţă de axa de rotaţie - care se opune mişcării de rotaţie în articulaţia respectivă.
Forţa de frecare are expresia Fμ = μ.Frad, iar momentul de torsiune al acestei forţe are expresia Mμ = R. μ.Frad = Frad ( μ. R) = Frad . Rμ unde Rμ = μ . R este raza "cercului de frecare" sau braţul forţei radiale ce determină momentul de frecare în articulaţie.
Forţa rezistentă la culisor, considerată la valoarea maximă Fr ≡ FD, determină în articulaţia B cu biela o forţă normală pe ghidaje, Fn, şi oforţă "în bielă" Fb, orientată tangent la cercurile de frecare de raze μ . RB şi μ . RA
corespunzătoare articulaţiilor A şi B pe care biela le formează cu culisorul şi, respectiv, cu manivela.
Unghiul dintre tangenta A'B' la cercurile de frecare amintite şi axa AB a bielei se notează cu y, iar valoarea sa rezultă din expresia
(5.61)
În aceste condiţii forţele Fn şi Fb sunt determinabile cu expresiile
(5.62)
Figura 5.6 Forţele din mecanismul manivelă-bielă-culisor, în condiţii reale
Momentul de torsiune rezistent la manivelă este dat de suma dintre momentul de frecare (Mtμ)0 ce se manifestă în axa O şi momentul forţei Fb faţă de aceeaşi axă, braţul acesteia fiind segmentul OO":
(5.63)Momentul de torsiune de frecare faţă de axa O are expresii diferite în funcţie de
tipul şi de soluţia constructivă a arborelui principal.Dacă acesta este de tipul "cu manivelă", cu lagăre identice dispuse simetric faţă
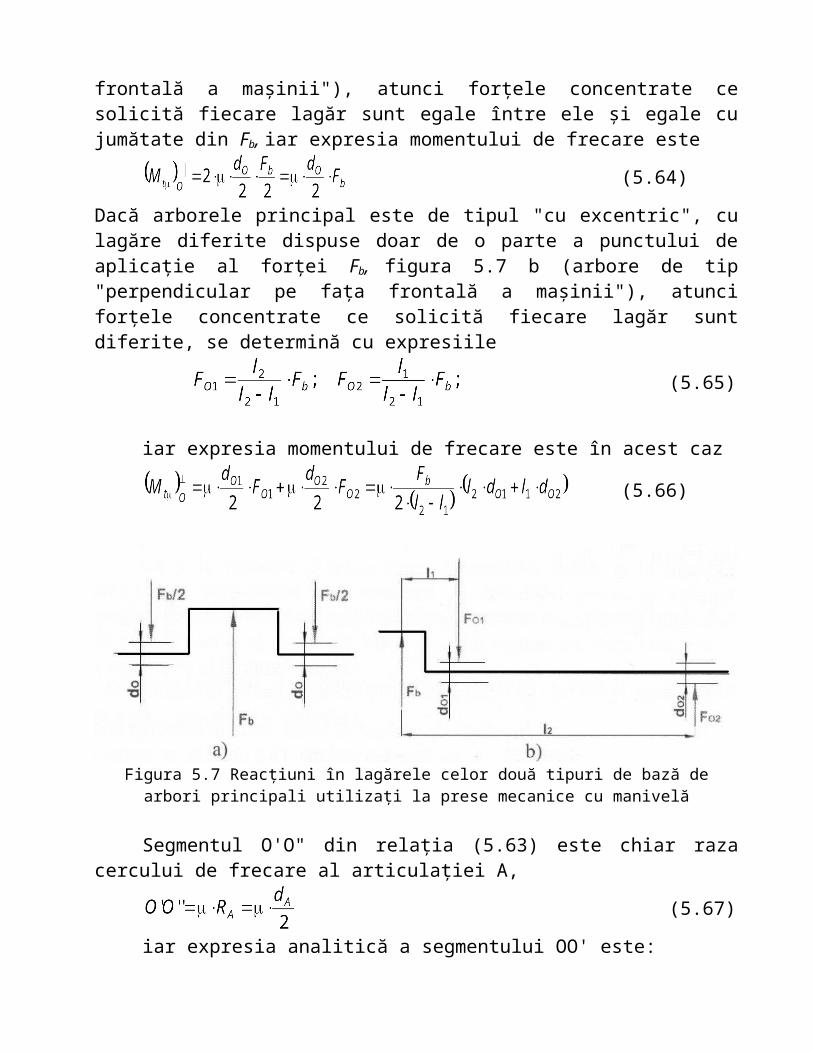
de punctul de aplicaţie al forţei Fb figura 5.7a (arbore de tip "paralel cu faţa frontală a maşinii"), atunci forţele concentrate ce solicită fiecare lagăr sunt egale între ele şi egale cu jumătate din Fb, iar expresia momentului de frecare este
(5.64)
Dacă arborele principal este de tipul "cu excentric", cu lagăre diferite dispuse doar de o parte a punctului de aplicaţie al forţei Fb, figura 5.7 b (arbore de tip "perpendicular pe faţa frontală a maşinii"), atunci forţele concentrate ce solicită fiecare lagăr sunt diferite, se determină cu expresiile
(5.65)
iar expresia momentului de frecare este în acest caz
(5.66)
Figura 5.7 Reacţiuni în lagărele celor două tipuri de bază de arbori principali utilizaţi la prese mecanice cu manivelă
Segmentul O'O" din relaţia (5.63) este chiar raza cercului de frecare al articulaţiei A,
(5.67)
iar expresia analitică a segmentului OO' este:
(5.68)Pentru liniarizarea relaţiei anterioare se explicitează funcţia sin(α+β+γ), se ţine
cont de relaţiile (5.6) şi (5.61) şi se acceptă aproximările cos β = 1, cos γ = 1 şi sinα.sinβ.sin γ = 0. În aceste condiţii expresia (5.68) capătă forma:
(5.69)
Numai în ultimul termen al relaţiei anterioare, având în vedere valoarea mică a termenului în discuţie şi că expresia momentului de torsiune rezistent la manivelă are cu adevărat relevanţă doar pentru unghiuri α < αN, s-a mai utilizat şi aproximarea cosα=1.
Expresia explicită a momentului de torsiune rezistent la manivelă se obţine prin înlocuirea în relaţia (5.63) a expresiilor (5.67), (5.69) şi, în funcţie de situaţie, (5.64) sau (5.66). De exemplu, pentru o presă cu arborele principal paralel cu faţa frontală expresia momentului de torsiune rezistent la manivelă este
(5.70)
În relaţia de mai sus se poate pune în evidenţă atât braţul ideal bid al forţei Fb, a se revedea relaţia -(5.51), dar şi braţul de frecare bμ al aceleiaşi forţe:
(5.71)
Dacă presa este de tip deschis şi cu arborele principal perpendicular pe faţa frontală a maşinii, atunci expresia braţului de frecare al forţei este
(5.72)

Rezultă că o formă "generalizată" a momentului de torsiune rezistent la manivelă se poate scrie sub forma
(5.73)S-a menţionat deja că momentul de torsiune rezistent maxim admis la arborele
principal este o mărime constantă şi că se exprimă în funcţie de un unghi curent oarecare al manivelei şi de forţa disponibilă, indiferent de reglajul concret al maşinii. Un caz particular corespunde situaţiei caracterizată de α ≡αN, FD ≡ FN, Rmax şi Lmed, aceasta fiind de altfel situaţia luată ca referinţă atunci când se stabileşte valoarea momentului de torsiune maxim capabil a fi transmis de către arborele principal al maşinii. Dacă se face referire la o maşină cu arbore e tip "paralel cu faţa frontală", atunci această precizare este complet echivalentă cu relaţia
(5.74)
din care se deduce expresia forţei disponibile (pentru prese mecanice cu manivelă, cu batiu deschis sau închis, cu arbore principal de tip "paralel cu faţa frontală"):
(5.75)
Ca şi la expresia (5.60) a forţei disponibile ideale, şi la expresia anterioară numărătorul este constant şi invariabil pentru o maşină anume, iar numitorul este variabil, dependent atât de valoarea unghiului de poziţie curent al manivelei cât şi valorile reglate ale razei cinematice a manivelei şi lungimii bielei.
Ţinând cont de expresia (5.73), relaţiile (5.74) şi (5.75) pot fi scrise în formă generală (şi sintetică):
(5.76)
(5.77)
* *
Într-o altă abordare, încărcarea cu forţe şi momente a elementelor componente ale mecanismului manivelă-bielă-culisor corespunde cu cea reprezentată în figura 5.8.
Sunt puse în evidenţă momentul de torsiune antrenor dezvoltat de arborele principal al maşinii, MtAP = M t antrenor, momentul de frecare rezistent din articulaţia O, cea a arborelui principal, momentele de frecare rezistente MμA din articulaţia A (unul
acţionând asupra manivelei arborelui principal, iar celălalt asupra bielei mecanismului), momentele de frecare rezistente MμB din articulaţia B (unul acţionând asupra manivelei bielei, iar celălalt asupra culisorului), forţa Fb din bielă, forţa Fn
normală pe ghidaje ce se manifestă în articulaţia B a mecanismului, cea dintre bielă şi culisor, forţa FB transmisă e către bielă către culisor pe direcţia deplasării acestuia, forţa de greutate GC a culisorului, forţa rezistentă Frez. opusă de semifabricat, forţele normale Fng1 şi F ng2 cu care ghidajele se opun rotirii culisorului faţă de centrul său de mişcare, precum şi forţele de frecare Fμg1 şi F μg2ce apar între ghidaje şi culisor,forţe generate de forţele normale Fng1 şi F ng2.
Se pot lua în considerare şi forţele şi momentele de inerţie ale componentelor mecanismului.
O schemă de încărcare echivalentă se obţine înlocuind momentele de torsiune rezistente prin forţele care le generează, prin deplasarea versorului lor paralel cu el însuşi la o distanţă egală cu braţul ce determină momentul de torsiune respectiv.
Figura 5.8 Forţele şi momentele de torsiune statice ce solicită mecanismul manivelă-bielă-culisor, în condiţii reale
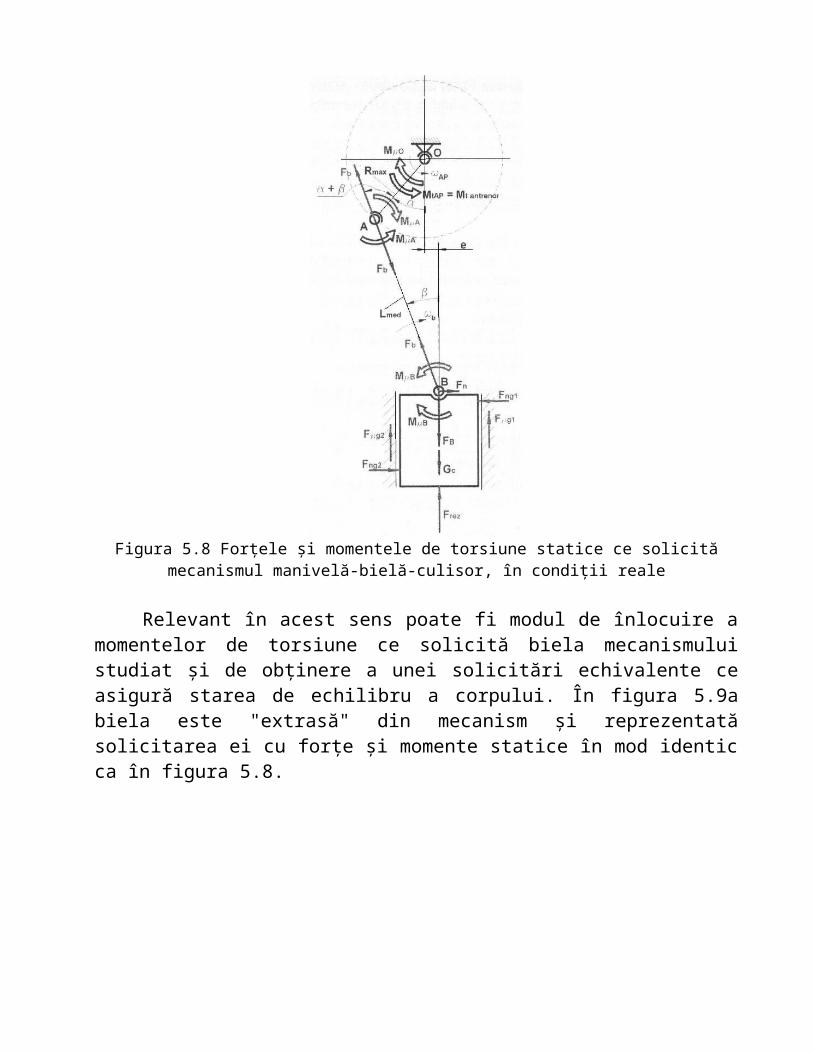
Relevant în acest sens poate fi modul de înlocuire a momentelor de torsiune ce solicită biela mecanismului studiat şi de obţinere a unei solicitări echivalente ce
asigură starea de echilibru a corpului. În figura 5.9a biela este "extrasă" din mecanism şi reprezentată solicitarea ei cu forţe şi momente statice în mod identic ca în figura 5.8.
Figura 5.9 Starea de echilibru static a bielei mecanismului manivelă-bielă-culisor, în condiţii reale, cu punerea în evidenţă a forţelor şi momentelor de torsiune rezistente, şi a stării echivalente
caracterizată numai de încărcare cu forţe
Forţa Fb din bielă generează tangent la articulaţiile A şi B forţele de frecare FμA= FμB= μFB,, care determină la rândul lor momentele de frecare rezistente MμA şi MμB, braţele fiind chiar razele RA şi RB ale articulaţiilor:
(5.78)
Prin translaţia forţelor Fb, tară schimbarea orientării lor, din centrele articulaţiilor A şi B la distanţe egale cu braţul celor două momente de frecare rezistente, μRA şi respectiv μRB, se obţine schema de solicitare din figura 5.9b, în care sunt prezente doar forţe, dar care nu asigură bielei stare de echilibru static. Pentru aceasta trebuie ca cele două forţe Fb contrare să fie concurente. Această situaţie se obţine prin rotirea adecvată a celor două forţe, versorul lor comun fiind simultan tangent la "cercurile de frecare" de raze μRA şi μRB, figura 5.9c.
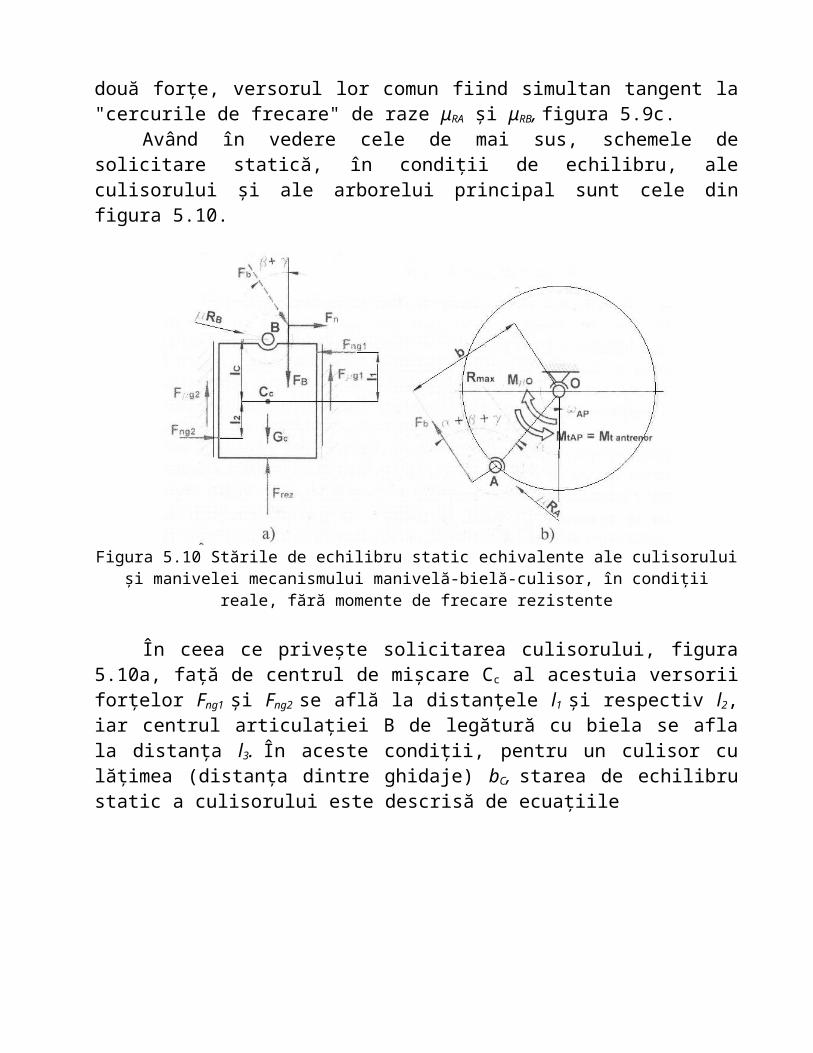
Având în vedere cele de mai sus, schemele de solicitare statică, în condiţii de echilibru, ale culisorului şi ale arborelui principal sunt cele din figura 5.10.
Figura 5.10 Stările de echilibru static echivalente ale culisorului şi manivelei mecanismului manivelă-bielă-culisor, în condiţii reale, fără momente de frecare rezistente
În ceea ce priveşte solicitarea culisorului, figura 5.10a, faţă de centrul de mişcare Cc al acestuia versorii forţelor Fng1 şi Fng2 se află la distanţele l1 şi respectiv l2, iar centrul articulaţiei B de legătură cu biela se afla la distanţa l3. În aceste condiţii, pentru un culisor cu lăţimea (distanţa dintre ghidaje) bC, starea de echilibru static a culisorului este descrisă de ecuaţiile
(5.79)
Valoarea maximă admisă a forţei rezistente Frez este forţa disponibilă la culisor, FD.
Starea de echilibru a arborelui principal este reprezentată în figura 5.10b. Tangent la cercul de frecare din articulaţia A, de rază μRA, este plasată forţa Fb cu care biela se opune rotaţiei manivelei. Forţa Fb este orientată faţă de manivelă sub un unghi α+β+γ. Momentul dezvoltat de această forţă faţă de articulaţia O, prin intermediul braţului b, şi momentul de frecare din articulaţia O, MμO, trebuie învins de momentul antrenor dezvoltat de arborele principal, MtAP = Mt antrenor.
Momentul de frecare MμO din articulaţia O are expresii diferite în funcţie de particularităţi constructive şi de amplasare ale arborelui principal (a se revedea expresiile (5.64) şi (5.66)).
În aceste condiţii, ecuaţia de echilibru a momentelor de torsiune ce solicită arborele unui mecanism manivelă-bielă-culisor este
(5.80)
Relaţia anterioară este în fapt identică cu relaţia (5.59) şi conduce, evident, pentru momentul real la manivelă şi pentru forţa disponibilă la culisor la aceleaşi relaţii ca cele prezentate anterior (a se revedea relaţiile (5.70) ... (5.77)). Se justifică astfel de ce la studiul mecanismelor cu bare articulate, cu luarea în considerare a frecărilor, forţele se dispun tangent la cercurile de frecare. Mai mult decât atât, pe baza acestei abordări se poate explica de ce la un moment dat, pentru valoare mică a unghiului de poziţie al manivelei, determinabil ca valoare, elementele mecanismului îşi schimbă brusc orientarea, ceea ce determină un mic salt în graficul de spaţiu al culisorului, în sensul retragerii lui faţă de semifabricatul asupra căruia acţionează.
5.3.4. Suprasolicitarea preselor mecanice cu manivelă
În figura 5.11 se dă un exemplu de grafic al forţei disponibile, ideală şi reală, pentru o presă mecanică cu manivelă. în aceeaşi figură sunt inserate şi reprezentări ale forţei tehnologice ce corespund cazurilor tipice de suprasolicitare (supraîncărcare) a maşinii.
Figura 5.11 Reprezentare grafică a forţei disponibile, ideale şi reale, pentru o presă mecanică cu manivelă
Solicitarea corectă, figura 5.1 l(a), a mecanismului unei prese cu manivelă corespunde cazului în care graficul de forţă tehnologică se află sub graficul de forţă disponibilă, maximul forţei tehnologice fiind mai mic decât forţa nominală. Nu este o condiţie ca lungimea cursei sub sarcină hs ≡ hîp să fie mai mică decât lungimea nominală a cursei hN, adică unghiul la manivelă corespunzător momentului de început
de presare αîp să fie cel mult egal cu unghiul nominal αN, fiind posibil şi, de altfel, frecvent întâlnită situaţia
(5.81)hîp fiind dependentă de grosimea semifabricatului şi de natura operaţiei, iar hN fiind determinabilă cu relaţia (5.40).
Trebuie însă respectată strict condiţia de consum energetic, cea care limitează aria de sub graficul de forţă tehnologică la valoarea FN . hN.
(5.82)
Dacă relaţia anterioară nu se respectă, atunci cantitatea de energie absorbită de la volant este mai mare decât valoarea maximă admisă pentru care acesta a fost proiectat, iar turaţia minimă a volantului scade sub limita admisă, fără posibilitatea recuperării integrale a energiei cedate până la o nouă cursă sub sarcină. Repetarea de noi operaţii în condiţii similare determină o scădere graduală a turaţiei volantului, ceea ce va avea ca efect final oprirea acestuia şi a motorului.
Solicitarea incorectă tehnic este cunoscută drept "suprasolicitare". "Subsolicitarea" (apreciabilă a) unei maşini este efectul managementului tehnic, poate fi rezultatul unui act deliberat dictat de o anumită realitate sau rezultatul unei erori de proiectare a procesului tehnologic şi/sau de atribuire a lui către o maşină cu caracteristici tehnice mult superioare faţă de ceea ce este necesar. Oricum, efectul "subsolicitării" este exploatarea în condiţii de eficienţă redusă a maşinii.
Sunt cunoscute trei tipuri de suprasolicitare a unei prese mecanice cu bare articulate:
- suprasolicitare după forţă;- suprasolicitare după moment;- suprasolicitare (simultană) după forţă şi moment.Suprasolicitarea după forţă apare atunci când, pentru o anumită zonă a cursei
sub sarcină, forţa tehnologică este mai mare decât forţa disponibilă, dar mai mică decât forţa nominală, figura 5.1 l(b):
(5.83)Suprasolicitarea după forţă are ca efect intrarea în funcţiune a sistemului de
protecţie la suprasarcina după forţă, în condiţii corecte de dimensionare şi/sau reglare a acestuia. Dacă acest sistem este cu piesă de distrugere, atunci aceasta se foarfecă şi determină încetarea acţiunii culisorului asupra semifabricatului supus prelucrării (v. § 4.2.5).
Suprasolicitarea după moment apare atunci când, pentru o anumită zonă a cursei nominală sub sarcină, forţa tehnologică este mai mare decât forţa nominală, dar mai mică decât forţa disponibilă, figura 5.11 (c):
. (5.84)
Suprasolicitarea după moment este echivalentă un moment rezistent la arborele principal mai mare decât cel maxim disponibil şi are ca efect patinarea cuplajului cu fricţiune al maşinii, dacă acesta este corect dimensionat.Suprasolicitarea (simultană) după forţă şi moment apare atunci când, pentru o anumită zonă a cursei nominală sub sarcină, forţa tehnologică este simultan mai mare decât forţa nominală şi decât forţa disponibilă, figura 5.11 (d):
(5.85)Suprasolicitarea (simultană) după forţă şi moment are ca efect fie patinarea
cuplajului maşinii, fie intrarea în funcţiune a sistemului de protecţie la suprasarcina după forfă, fie ambele (simultan).
Ca urmare a suprasolicitării, în anumite condiţii poate apare fenomenul de blocare a mecanismului executor. Acest fenomen nedorit se manifestă în timpul cursei de coborâre a cuiisorului, într-o poziţie imediat vecină cu punctul mort inferior, şi se datorează unor forţe de frecare mari în articulaţiile mecanismului şi în ghidajele cuiisorului, în condiţiile unei solicitării intense sub sarcină a maşinii.
În timpul executării operaţiei de deformare, în paralel cu acţiunea (deformare plastică şi/sau tăiere) asupra semifabricatului se produce şi deformarea elastică a sistemului mecanic al presei, în structura mecanică a maşinii acumulându-se o anumită cantitate de energie. în mod curent, această energie se eliberează în momentul în care încetează să mai acţioneze forţa tehnologică, structura mecanică a maşinii relaxându-se elastic.
În anumite condiţii, datorită rezistenţei opusă de forţele de frecare, cantitatea (mare) de energie acumulată în structura mecanică a presei sub formă de deformaţie elastică nu poate fi eliberată şi apare fenomenul de blocare a culisorului şi a întregului mecanism care îl antrenează. Acest fenomen apare în următoarele condiţii particulare:
• supraîncărcare după moment, când maşina (volantul) nu dispune de suficientă energie pentru executarea completă operaţiei de efectuat asupra semifabricatului;
• supraîncărcare după forţă şi întreruperea legăturii dintre bielă şi culisor ca urmare a forfecării elementului activ al sistemului de siguranţă sau ca urmare a dezactivării cuplajului maşinii şi intrării în funcţiune a frânei.
Datorită supraîncărcării, pentru oricare dintre cele două cazuri precizate mai sus, batiul continuă să rămână sub sarcină, deformat elastic. Această stare de solicitare acţionează asupra mecanismului executor şi tinde să întoarcă culisorul, biela şi manivela astfel încât să anuleze deformatia elastică a sistemului mecanic al maşinii, dar această acţiune este împiedicată de momentul de frecare din articulaţii. Pentru învingerea forţelor elastice este nevoie să se aplice un moment antrenor suplimentar. Fără aplicarea unui astfel de moment antrenor suplimentar, suficient ca valoare, mecanismul rămâne în continuare blocat într-o poziţie de echilibru.
Stabilirea poziţiei de blocare constă în determinarea unghiului de poziţie al manivelei la care, în condiţiile menţionate anterior, are loc fenomenul de blocare a mecanismului executor. Pentru aceasta se pleacă de la ecuaţia de echilibru energetic
dintre lucrul mecanic al forţei (de blocare) cu care acţionează culisorul şi lucrul mecanic al momentului de frecare din articulaţii:
în care : F blocare- forţa la culisor corespunzător căreia apare fenomenul de blocare a mecanismului executor; d(hij(α)) - derivata expresiei de spaţiu a culisorului pentru poziţia curentă a culisorului, corespunzătoare stării blocate;
(bμ)ij - braţul de frecare din expresia momentului real la manivelă (a se vedea relaţiile (5.71) şi (5.72));
dα - derivata unghiului curent de poziţie al manivelei, care corespunde stării blocate a mecanismului executor.
Scriind relaţia (5.86) sub forma rezultă expresia ce caracterizează, la limită, fenomenul de blocare:
(5.88)
în care (bid)ij este braţul ideal al forţei (v. şi relaţiile (5.75) şi (5.77)).Dacă:
I. (bid)ij > (bμ)ij - blocarea nu se produce;II. (bid)ij = (bμ)ij - blocarea este incertă (limita condiţiei de blocare);III. (bid)ij < (bμ)ij blocarea este sigură.Pentru determinarea unghiului de poziţie αbl ce caracterizează, la limită, starea
blocată a mecanismului, se pleacă de la condiţia limită de blocare, (bid)ij = (bμ)ij, exprimată şi prin relaţia (5.88).
Deoarece blocarea mecanismului executor apare, de regulă, la valori mici ale unghiului de poziţie, se pot face aproximările
; ; (5.89)
astfel că relaţia (5.88) poate fi scrisă succesiv sub formele
(5.90)
(5.91)
(5.92)
Pentru cazul mecanismelor manivelă-bielă-culisor fără excentricitate, la care ki= 0, ecuaţia generală (5.91) se scrie sub forma
(5.93)
din care rezultă că unghiul de poziţie al manivelei la care, la limită, poate apare fenomenul de blocare are expresia:
(5.94)
Momentul antrenor suplimentar ce trebuie aplicat la manivelă pentru scoaterea mecanismului executor al presei din poziţia de blocare cauzată de forţele elastice ce solicită sistemul mecanic al maşinii se determină din condiţia
(5.95)Valoarea maximă necesară pentru M, suplimentar apare când αbl = 0, adică
atunci când manivela şi biela mecanismului sunt în prelungire, braţul ideal (bid)ij este nul, iar culisorul se află în poziţia sa de punct mort inferior.
5.3.5. Construcţii de prese mecanice cu manivelă, cu simplă acţiune
Clasa preselor mecanice cu manivelă cuprinde toate maşinile de prelucrat prin deformare, comune sau speciale, al căror mecanism de transformare pentru obţinerea mişcării principale de translaţie rectiliniealternativă conţine cel puţin un mecanism manivelă-bielă-culisor (a se revedea figura 3.25). Sunt cuprinse în această clasă presele mecanice cu manivelă, cu simplă acţiune, presele mecanice cu dublă acţiune, presele cu genunchi, automatele de presare mecanice, foarfece mecanice cu cuţite paralele, foarfece mecanice universale pentru pro fi le, diverse prese specializate şi speciale. Prezentul capitol se referă însă strict la presele mecanice cu manivelă, cu simplă acţiune, frecvent întâlnite fiind:
- prese mecanice cu manivelă, cu batiu deschis, cu una sau două manivele, cu acţionare din partea superioară;
- prese mecanice cu simplă acţiune, cu batiu închis, cu una, două sau patru manivele, cu acţionare din partea superioară;
- prese mecanice cu simplă acţiune, cu batiu închis, cu acţionare din partea inferioară.
5.3.5.1. Prese mecanice cu manivelă, cu batiu deschis, cu una sau două manivele, cu acţionare din partea superioară
Presele mecanice cu o manivelă, cu batiu deschis, înclinabil sau nu, sunt presele cel mai frecvent întâlnite, devenind din acest motiv emblematice pentru întreaga clasă a maşinilor-unelte de prelucrat prin deformare plastică la rece.
Presele mecanice cu manivelă sunt maşini simple, rigide şi foarte durabile. Durata mare de viaţă a preselor mecanice face ca în exploatare să existe şi să fie întâlnite maşini de acest tip de generaţii foarte diverse, dar totuşi foarte asemănătoare ca structură şi performanţe.
În general presele mecanice cu o manivelă, cu batiul deschis, sunt de precizie normală, dar se produc şi se utilizează din ce în ce mai mult prese mecanice (cu o
manivelă) de precizie. Producătorii de prese mecanice cu o manivelă, cu batiul deschis, de precizie normală sau de precizie crescută, fabrică cel mai adesea familii de astfel de maşini.
Forţele nominale ale preselor cu o manivelă, cu simplă acţiune, cu batiul deschis, sunt cuprinse în domeniul 6 - 100 tf (60 - 1000 kN). Se întâlnesc însă şi prese de acest tip, chiar familii, cu forţe nominale mai mari, de 160 - 400 tf, cum sunt presele din familia PEE produse de ERFURT, Germania. Caracteristici tehnice ale preselor acestei familii se dau în tabelul 5.2.
Tabelul 5.2. Caracteristici tehnice ale preselor mecanice cu o manivelă, cu batiu deschis, din familia PEE produse de compania ERFURT, Germania [207]
Pentru presele mecanice de precizie poate fi dată ca exemplu familia preselor PMCP (Presă mecanică cu Manivelă, cu batiu deschis în formă de C, de Precizie), maşini produse de S.C. SIMEROM S.A. Sibiu.
În figura 5.12 se prezintă o vedere a presei PMCP63, iar în tabelul 5.3 câteva dintre caracteristicile maşinilor ce compun această familie de prese mecanice cu manivelă. Maşinile mici ale familiei au batiul înclinabil, fapt care se reflectă în codul lor (Presă mecanică cu Manivelă, cu batiu deschis în formă de C, Înclinabil, de precizie).
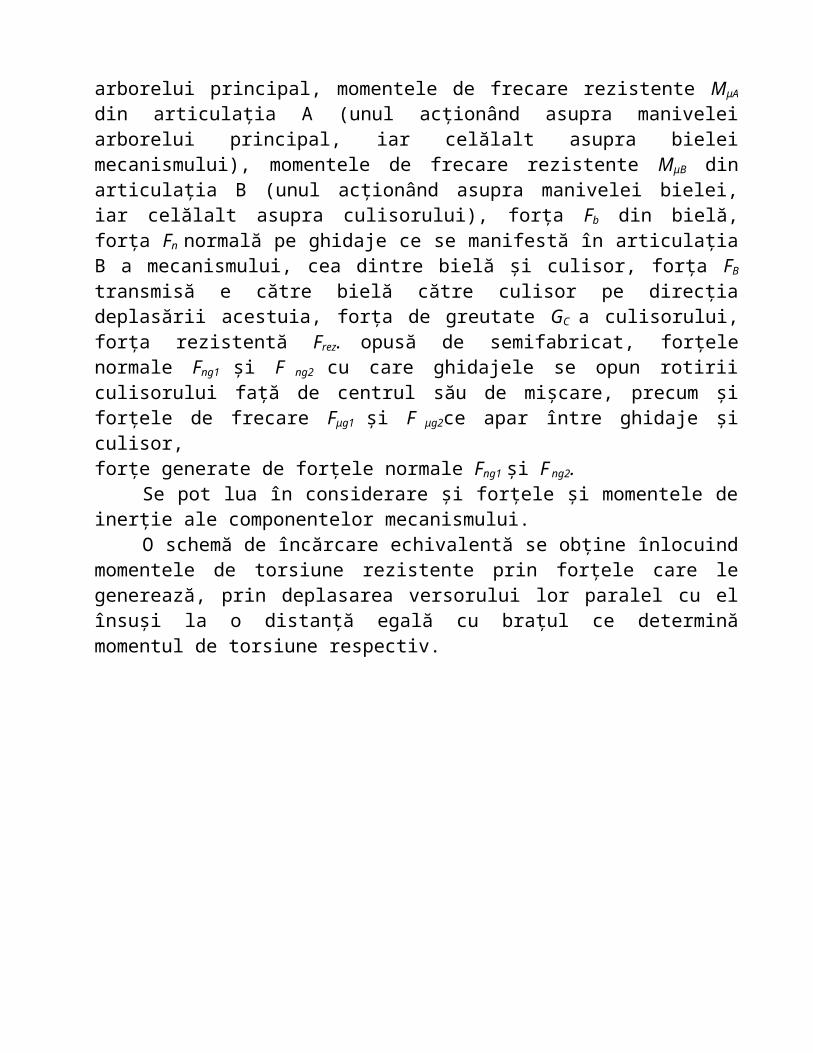
Figura 5.12 Presa mecanică (cu manivelă, cu batiul deschis,) de precizie PMCP 63. Vedere [233]
Tabelul 5.3. Caracteristici tehnice ale preselor mecanice de precizie din familia PMCP produse de S.C. SIMEROM S.A. Sibiu
Presele mecanice cu batiul deschis, cu două manivele, sunt maşini mai rar întâlnite. Au caracteristic culisorul lung în comparaţie cu lăţimea, ceea ce impune, pentru o bună conducere a acestuia, antrenarea prin două mecanisme manivelă-bielă-culisor identice. Maşinile de acest tip au un singur arborele principal, cu două manetoane, amplasat paralel cu faţa frontală a maşinii.
Două exemple de astfel de maşini se prezintă în figura 5.13; în stânga o maşină modernă, iar în dreapta una ce ţine de "istoria tehnicii". Este de remarcat, totuşi, că nu
se identifică diferenţe semnificative de structură, ci doar de aspect, calitate şi performanţe tehnice.
Figura 5.13 Prese mecanice cu două manivele, cu batiu deschis, cu simplă acţiune, cuarbore principal paralel cu faţa frontală
Presele mecanice cu batiul deschis, cu una sau două manivele, sunt prese cu forţă nominală mică sau medie, cu caracter universal, posibil de utilizat pentru o diversitatejie operaţii de prelucrare prin deformare plastică.
5.3.5.2. Prese mecanice cu manivelă, cu simplă acţiune, cu batiu închis, cu una, două sau patru manivele, cu acţionare din partea superioară
Presele mecanice cu manivelă, cu simplă acţiune, cu batiul închis, sunt utilizate pentru prelucrări prin deformare plastică diverse, dar care necesită forţe medii sau mari. Presele mecanice cu manivelă (cu simplă acţiune) cu batiul închis sunt prese rigide, de gabarite medii şi mari.
Semnificativă este înălţimea acestor maşini, deseori de peste 4 metri. Necesită adesea fundaţii speciale, mai ales că o parte a acestor maşini se plasează sub nivelul solului.
În figura 5.14 se prezintă imaginea unei prese mecanice cu o manivelă, cu batiul închis.
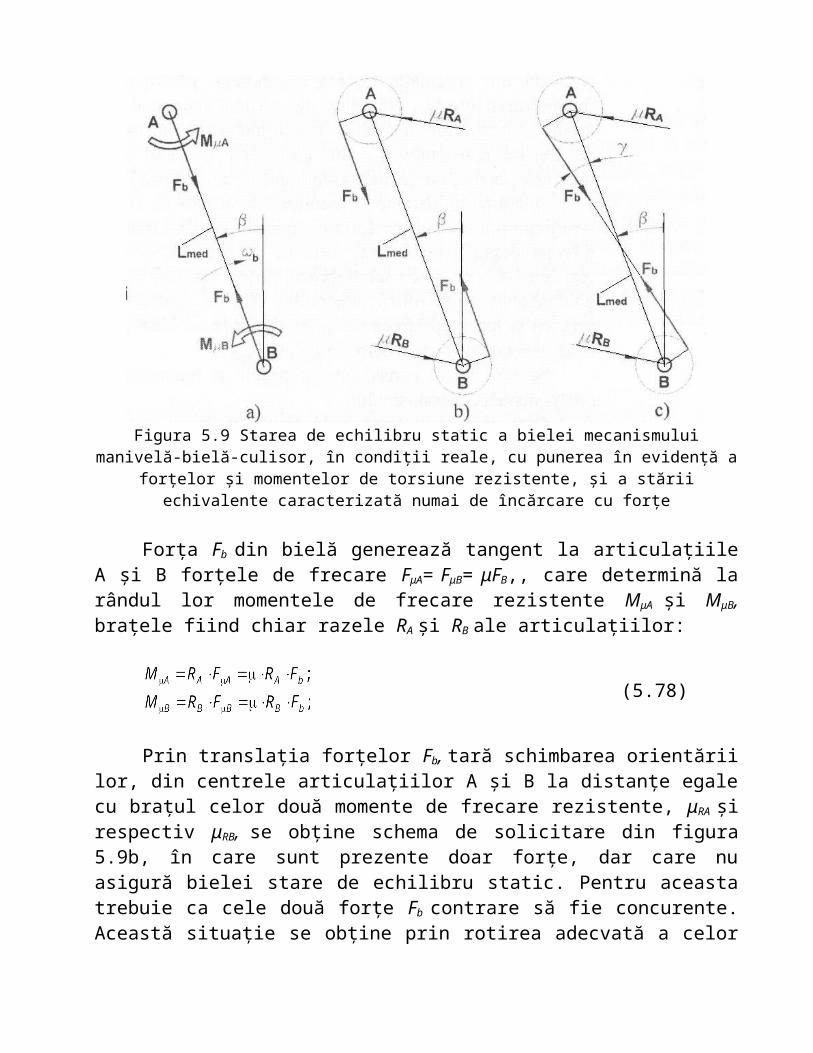
Figura 5.14 Presă mecanică cu o manivelă, cu batiu închis, cu simplă acţiune, cu arbore principal perpendicular pe faţa frontală. Vedere
Semifabricatele supuse prelucrării, în general table, sunt de grosimi medii, iar aria asupra căreia se acţionează este cel mai adesea de mărime medie. Ca urmare maşinile de acest tip necesită o suprafaţă utilă a mesei medie sau mare, deci şi un culisor cu gabarit adecvat al suprafeţei sale inferioare. Iar cum un culisor de gabarit mediu sau mare nu poate fi bine condus prin antrenarea de la un singur mecanism manivelă-bielă-culisor, rezultă că mai des întâlnite sunt presele mecanice cu batiul închis, cu două sau cu patru manivele. Dintre acestea pot fi date ca exemplu presele din familiile PKZZ şi PKZV produse de ERFURT [207].
În figura 5.15a se prezintă, în vedere, presa mecanică PKZZ IV 500 TS, cu două manivele, cu batiul închis, iar în tabelul 5.4 se dau unele date tehnice ale preselor mecanice cu două manivele, cu batiul închis, din familia PKZZ.
Tabelul 5.4. Caracteristici tehnice ale preselor mecanice cu două manivele, cu batiul închis, din familia PKZZ produse de ERFURT
a) b)Figura 5.15 Prese mecanice cu simplă acţiune, cu două şi cu patru manivele, cu batiul închis. Vederi
a) Presa mecanică cu simplă acţiune, cu două manivele, cu batiul închis, PKZZ IV 500 TSb) Presa mecanică cu simplă acţiune, cu patru manivele, cu batiul închis, PKZV IV 500 TS
Fie şi numai pentru comparaţie, în figura 5.15b se prezintă, în vedere, presa mecanică PKZV IV 500 TS, cu patru manivele, cu batiul închis, iar în tabelul 5.5 se dau unele date tehnice ale preselor mecanice cu două manivele, cu batiul închis, din familia PKZV.
Tabelul 5.5. Caracteristici tehnice ale preselor mecanice cu patru manivele, cu batiul închis, din familia PKYV produse de ERFURT
Presele mecanice cu două. manivele, cu batiul deschis, cu simplă acţiune, pot avea un singur arbore principal cu două manetoane, amplasat în planul median al culisorului de-a lungul acestuia, în mod similar cu presele mecanice cu două manivele, cu batiul deschis (a se revedea figura 5.13), sau doi arbori principali identici, fiecare cu câte un singur maneton, antrenaţi sincron, paraleli, axele lor fiind perpendiculare pe direcţia lungimii culisorului.
La presele mecanice cu patru manivele, cu batiul închis, se identifică întotdeauna doi arbori principali identici, paraleli, cu axe perpendiculare pe direcţia lungimii culisorului, antrenaţi sincron în acelaşi sens, figura 5.16, sau în sensuri contrare. Această a doua situaţie este mai favorabilă deoarece forţele normale pe ghidaje care se dezvoltă în mecanismele manivelă-bielă-culisor se anulează reciproc.
Lungimea celor patru manivele se reglează simultan şi în mod egal, culisorul deplasându-se în timpul acestei operaţii paralel cu el însuşi.
La multe prese mecanice cu batiul închis, cu două sau patru manivele, se identifică biele scurtate şi cu tije translatabile ghidate în batiu, particularitate de construcţie care permite reducerea gabaritul pe înălţime a maşinii şi care contribuie semnificativ la creşterea bunei conduceri (ghidări) a culisorului. Aceste două aspecte se identifică cu uşurinţă în figura 5.17.
Câteva detalii privind construcţia mecanismului cu bielă scurtată şi ghidată suplimentar în batiu se identifică în figura 5.18. Biela este monocorp, foarte rigidă. Arborele principal este chiar corpul ultimei roţi dinţate (în „V") a reductorului, mişcarea de rotaţie realizându-se în jurul unui ax (poziţia 2 în figura 5.16) ce străbate roata în discuţie şi care este solidar cu batiul maşinii. Cele două coroane ale roţii sunt depărtate între ele pentru a face loc lagărului bielei. Roata în discuţie este compusă din două părţi identice, asamblate la montajul maşinii, planul de separaţie dintre cele două şi planul median al bielei suprapunându-se.
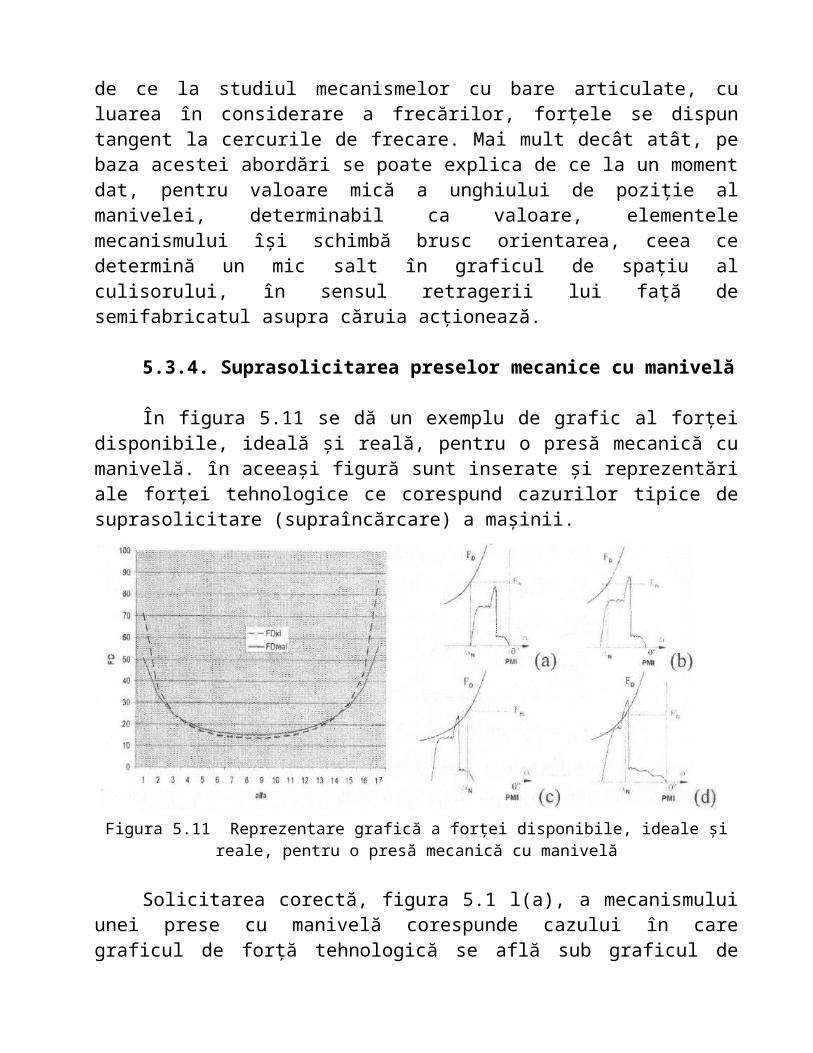
Figura 5.16 Schema cinematică a unei prese mecanice cu două manivele, cu batiu închis, cu reductor în două trepte, cu rotaţie sincronă a bielelor în acelaşi sens
Figura 5.17 Calitatea conducerii culisorului la [135]:a) prese cu bielă normală; b) prese cu bielă scurtată şi tijă ghidată în batiu
Figura 5.18 Detalii de construcţie ale mecanismului cu bielă scurtată şi tijă ghidată în batiu [128]
Legătura bielei scurtate cu tija ghidată suplimentar se face printr-o articulaţie cilindrică caracterizată de un detaliu de construcţie şi de funcţionare interesant: dacă în timpul cursei de retragere a culisorului (când sarcina din mecanism este redusă) legătura dintre biela scurtată şi tijă se realizează prin intermediul bolţului cilindric al acestei articulaţii, în timpul cursei active (de coborâre) sub sarcină a culisorului, când forţele ce solicită articulaţia sunt mult mai mari, biela împinge în tijă prin contact între suprafaţa cilindrică exterioară a ochiului său mic şi suprafaţa cilindrică cavă, deschisă, coaxială cu bolţul, practicată în tijă.
Prin aceasta se evită supradimensionarea bolţului, pentru a rezista sarcinilor mari ce se manifestă în timpul cursei sub sarcină a maşinii.
Toate presele mecanice cu manivelă, cu batiu închis, precum şi foarte multe dintre cele cu batiu deschis, dispun de sisteme fluidice (pneumantice sau hidraulice) de echilibrare a greutăţii culisorului şi de eliminare a pieselor sau deşeurilor din partea inferioară a sculei, sisteme reprezentate în mod explicit în figura 5.16.
5.3.5.3. Prese mecanice cu manivelă, cu batiu închis, cu acţionare din partea inferioară
Presele mecanice cu manivelă, cu antrenare din partea superioară, au înălţime mare, ceea ce face necesară amplasarea lor în spaţii de producţie cu înălţime mare, iar accesul la multe dintre mecanisme este dificil. În plus, centrul de greutate al maşinii este implicit plasat mult deasupra solului, ceea ce reduce stabilitatea maşinii şi impune o bună fixare a acesteia în fundaţie. Pentru a elimina aceste dezavantaje se construiesc prese (cu manivelă) cu antrenare din partea superioară, un exemplu fiind cea prezentată în figura 5.19.

Figura 5.19 Presă mecanică cu patru manivele, cu batiu închis, cu antrenare din partea inferioară
La acestea marea majoritate a mecanismelor sunt plasate sub masa maşinii. Parte a părţii inferioare a maşinilor în discuţie se află deseori chiar sub nivelul solului, ceea ce face ca şi în acest caz accesul la mecanisme este dificil, dar centrul de greutate al maşinilor este foarte coborât, stabilitatea lor fiind mult îmbunătăţită.
Presele mecanice (cu manivelă) cu acţionare din partea inferioară maşini robuste, cu batiu închis, de regulă cu culisor lung. Se utilizează cel mai adesea ca prese mecanice multipost automate, cu transfer, aspect care le plasează într-o altă subclasă de prese mecanice decât cea abordată în acest capitol. Sunt prese cu două sau, mai ales, patru manivele, solicitarea acestora în timpul cursei sub sarcină fiind una de tracţiune, mai favorabilă decât solicitarea de compresiune a bielelor preselor cu acţionare din partea superioară.
Bielele preselor mecanice cu acţionare din partea inferioară sunt monocorp şi scurte, legătura cu culisorul realizându-se prin tije lungi, aflate în mişcare de translaţie, ghidate suplimentar în batiu.
Referinţe bibliografice1. Aramă, Lia, Morozan, T.: Probleme de calcul diferenţial şi integral. Editura Tehnică, Bucureşti, 1978, p. 225-22842. Cioară, R.: Cuplaje şi frâne pentru maşini-unelte de prelucrat prin deformare. Calcul proiectare, construcţie. Editura Matrix Rom, Bucureşti, 2005, ISBN 973-685-857-X128. Rovinskii, G.N.: Listoştampovocinîe mehaniceskie pressî. Izdatelistvo "Maşinostroienie", Moskva, 1968135. 41. Tabără, V., Catrina, D., Ganea, V.: Calculul, proiectarea şi reglarea preselor. Editura Tehnică, Bucureşti, 1976136. 10. Tabără, V., Tureac, I.: Maşini pentru prelucrări prin deformare. Editura Didactică şi Pedagogică, Bucureşti, 1984159. * * *: Manualul inginerului mecanic. Voi. I. Editura Tehnică, Bucureşti, 1976
160. * * *: Mică enciclopedie matematică. Editura Tehnică, Bucureşti, 1980, p. 609-622207. * * *: Prospecte ERFURT, Germania233. * * *: Prospecte SIMEROM S.A., România


















