
Capitolul 1 Ecuatii diferentiale de ordinul ˆıntâi rezolvabile prin ...
281
Capitolul 1 Ecuat ¸ii diferent ¸iale de ordinul ˆ ıntˆ ai rezolvabile prin metode elementare Definit ¸ia 1.0.1 O ecuat ¸ie diferent ¸ialˇ a de ordinul ˆ ıntˆ ai este o relat ¸ie de dependent ¸ˇa funct ¸ionalˇ a de forma g (t,x, ˙ x)=0 (1.1) ˆ ıntre funct ¸ia identicˇ a t → t definitˇ a pe intervalul I necunoscut, o funct ¸ie necunoscutˇ a x ¸ si derivata ei ˙ x definite pe acela¸ si interval. ˆ In ecuat ¸ia (1.1) funct ¸ia g se considerˇa cunoscutˇa, iar rezolvarea ecuat ¸iei ˆ ınseamnˇa determinarea funct ¸iilor necunoscute x care verificˇa ecuat ¸ia. Definit ¸ia 1.0.2 O funct ¸ie realˇ a x de clasˇ a C 1 definitˇ a pe un interval deschis I ⊂ IR 1 se nume¸ ste solut ¸ie a ecuat ¸iei (1.1) dacˇ a pentru orice t ∈ I tripletul (t,x(t), ˙ x(t)), apart ¸ine domeniului de definit ¸ie al lui g ¸ si g (t,x(t), ˙ x(t)) = 0. (1.2) Graficul unei solut ¸ii: Γ = {(t,x(t))|t ∈ I } se nume¸ stecurbˇaintegralˇa. La ˆ ınceput vom prezenta cˆateva cazuri particulare de asemenea ecuat ¸ii, care se rezolvˇa cu metode elementare¸ si probleme concrete din diferite domenii care au condus la asemenea ecuat ¸ii. 1
Transcript of Capitolul 1 Ecuatii diferentiale de ordinul ˆıntâi rezolvabile prin ...
Capitolul 1
Ecuatii diferentiale de ordinulıntai rezolvabile prin metodeelementare
Definitia 1.0.1 O ecuatie diferentiala de ordinul ıntai este o relatie de dependentafunctionala de forma
g(t, x, x) = 0 (1.1)
ıntre functia identica t 7→ t definita pe intervalul I necunoscut, o functienecunoscuta x si derivata ei x definite pe acelasi interval.
In ecuatia (1.1) functia g se considera cunoscuta, iar rezolvarea ecuatieiınseamna determinarea functiilor necunoscute x care verifica ecuatia.
Definitia 1.0.2 O functie reala x de clasa C1 definita pe un interval deschisI ⊂ IR1 se numeste solutie a ecuatiei (1.1) daca pentru orice t ∈ I tripletul(t, x(t), x(t)), apartine domeniului de definitie al lui g si
g(t, x(t), x(t)) = 0. (1.2)
Graficul unei solutii: Γ = (t, x(t))|t ∈ I se numeste curba integrala.La ınceput vom prezenta cateva cazuri particulare de asemenea ecuatii,
care se rezolva cu metode elementare si probleme concrete din diferite domeniicare au condus la asemenea ecuatii.
1

2 CAPITOLUL 1
1.1 Problema primitivei. Ecuatii
diferentiale de forma x = f(t)
Problema 1.1.1 O conducta termica are diametrul 10 (cm) si este izo-lata cu un strat cilindric de 10 (cm) grosime. Temperatura conductei este160 (C), iar temperatura mediului exterior este 30 (C).
i) Care este legea de variatie a temperaturii ın stratul izolant ın cazulstationar?
ii) Ce cantitate de caldura cedeaza fiecare metru de conducta ın 24 ore?
Se da coeficientul de conductivitate termica k = 0, 07 (W/K ·m).
Rezolvare:Fie t distanta unui punct din stratul izolant si axa conductei termice,
t ∈ (5, 15) × 10−2m si x(t) temperatura ın acest punct. Temperatura estefunctia necunoscuta si depinde de t, iar functia x = x(t) descrie variatiatemperaturiii ın stratul izolant.
i) Pentru determinarea functiei x(t) folosim legea lui Fourier: cantitateade caldura Q cedata ın unitatea de timp ın regim stationar pe suprafatalaterala a cilindrului de raza t este proportionala cu produsul dintre arialaterala a cilindrului si variatia temperaturii dx:
−k · S(t) · dxdt
= Q. (1.3)
unde k este conductivitatea termica a materialului izolant.Aria laterala a cilindrului de raza t si lungime l, este S(t) = 2π · t · l. Rezulta:
dx
dt= − Q
2π k l· 1
t. (1.4)
Prin urmare avem de determinat o functie x(t) care veifica (1.4).Din teoria primitivelor rezulta ca orice functie x(t) care verifica (1.4) este
data de formula
x(t) = − Q
2π k l· ln t+ C (1.5)
ın care t ∈ (5, 15) si C este o constanta oarecare. Determinarea legii devariatie cerute revine la selectionarea acelei functii x(t) din familia (1.5) care

Problema primitivei. Ecuatii diferentiale de forma x = f(t) 3
verifica conditiile: pentru t1 = 5 (cm) avem x(t1) = 160 (C), si pentrut2 = 15 (cm), x(t2) = 30 (C).
Impunand aceste conditii, rezulta
C = 303 + 130 · ln 15 · 10−2
ln 3= 78, 51(K) si
Q
2π k l=
130
ln 3,
de undex(t) = 78, 51 − 118, 33 ln t.
ii) Folosind valorile numerice rezulta Q iar pentru cantitatea de calduracedata de fiecare metru liniar (l= 1 m) ın 24 ore, q = Q
l· 24 · 3600(s).
Trecem acum la cazul general de rezolvare a unei ecuatii diferentiale deforma x = f(t) ın care f este o functie reala continua definita pe un intervalI ⊂ IR1, considerata cunoscuta.
Din teoria primitivelor se stie ca, daca f este o functie reala continuadefinita pe un interval I ⊂ IR1, atunci exista o familie de functii reale declasa C1 definite pe I a caror derivata este functia f . Aceste functii diferaıntre ele printr-o constanta si se obtin cu formula:
x(t) =
∫ t
t∗f(τ)dτ + C (1.6)
ın care C este o constanta reala iar
∫ t
t∗f(τ)dτ este o primitiva a functiei f .
Pentru t0 ∈ I si x0 ∈ IR1 exista o singura solutie x = x(t) a ecuatiei (1.6)care verifica conditia x(t0) = x0 si aceasta este data de formula
x(t) = x0 +
∫ t
t0
f(s)ds. (1.7)
Problema determinarii acelei solutii a ecuatiei x = f(t) care verifica conditiax(t0) = x0 se numeste problema cu date initiale sau problema Cauchy. Intr-oasemenea problema t0 si x0 se considera cunoscute si se numesc date initiale.Problema ın sine se noteaza traditional astfel:
x = f(t) (1.8)
x(t0) = x0
si solutia ei cu x(t; t0, x0).

4 CAPITOLUL 1
Concluzii
1. Exista probleme de fizica care conduc la ecuatii diferentiale de formax = f(t) (numita problema primitivei) ın care f este o functie realacontinua definita pe un interval deschis (a, b) ⊂ IR1.
2. Oricare ar fi solutia x = x(t) a ecuatiei diferentiale x = f(t) exista oconstanta reala C astfel ıncat
x(t) =
∫ t
t∗f(τ)dτ + C, (∀)t ∈ (a, b).
3. Oricare ar fi t0 ∈ (a, b) si x0 ∈ IR1 exista o singura functie x = x(t)definita pe (a, b) care este solutia problemei cu date initiale
x = f(t)
x(t0) = x0
Exercitii
1. Sa se determine solutiile urmatoarelor ecuatii diferentiale (cu calcula-torul):
a) x = 1 + t+ t2; t ∈ IR1 R : x(t) =t3
3+t2
2+ t+ C
b) x =1
t; t > 0 R: x(t) = ln t+ C
c) x = 1 + sin t+ cos 2t; t ∈ IR1 R: x(t) = t− cos t+1
2sin 2t+ C
d) x =1
1 + t2; t ∈ IR1 R: x(t) = arctan t+ C
e) x =1
t2 − 1; t ∈ (−1, 1) R: x(t) =
1
2ln
1 − t
1 + t+ C
f) x =1√t2 − 4
; t ∈ IR1 − [−2, 2] R: x(t) = ln(t+√t2 − 4) + C

Problema primitivei. Ecuatii diferentiale de forma x = f(t) 5
g) x = e2t + sin t; t ∈ IR1 R: x(t) =1
2e2t − cos t+ C
h) x = et2 ; t ∈ IR1 R: se determina numeric o primitiva
a lui et2 , de exemplu
∫ t
0
es2
ds
2. Sa se rezolve urmatoarele probleme Cauchy si sa se reprezinte graficsolutiile (cu calculatorul):
a) x = 1 + t+ t2, t ∈ IR1, x(0) = 1
R: x(t) =t3
3+t2
2+ t+ 1
b) x =1
t, t > 0, x(1) = 0
R: x(t) = ln t
c) x=1+sin t+cos 2t, t∈IR1, x(−π) = 7
R: x(t)=−cos t+1
2sin 2t+t+6+π
d) x =1
1 + t2, t ∈ IR1, x(−1) = −2
R: x(t) = arctan t+1
4π − 2
e) x = − 2
(t2 − 1)2, t < 1, x(−2) = 0
R: x(t)=ln
√t−1
t+1+
t
t2−1+
2
3−ln
√3
f) x =1√t2 + t
, t > 0, x(1) = 1
R: x(t)=ln
(1
2+t+
√t2+t
)+ln 2+1

6 CAPITOLUL 1
1.2 Ecuatii diferentiale autonome x = g(x)
Problema 1.2.1 O racheta meteorologica este lansata vertical ın sus cuviteza initiala de 100 (m/s). Rezistenta aerului franeaza miscarea ei si-icomunica acceleratia −k · v2(t), v(t) fiind viteza rachetei la momentul t iark o constanta pozitiva.
i) Sa se afle timpul ın care racheta atinge ınaltimea maxima.
ii) Sa se afle ınaltimea maxima la care se ridica racheta.
Rezolvare:i) Acceleratia totala a rachetei, ın lansarea pe verticala ın sus este a =
−(g + k v2) unde g ≈ 10 (m/s2) este acceleratia gravitationala, iar k oconstanta pozitiva considerata cunoscuta.
Legea de miscare a rachetei se scrie astfel:
dv
dt= −(g + k v2) (1.9)
Functia v care intervine ın (1.9) reprezinta viteza rachetei si este necunoscuta.Ea trebuie gasita pentru ca apoi egaland-o cu zero (aceasta ınseamna caracheta a atins ınaltimea maxima) sa gasim timpul ın care racheta atingeınaltimea maxima.
Din (1.9) si din inegalitatea g + k v2 > 0 rezulta egalitatea
− 1
g + k v2· dvdt
= 1.
Trecand la primitive se obtine egalitatea
−∫ t
t∗
1
g + k v2(τ)· dvdτdτ =
∫ t
t∗dτ
din care printr-o schimbare de variabila rezulta
√k
garctan
(v(τ) ·
√k
g
)∣∣∣∣∣
t
t∗
= −kτ |tt∗
sau
v(t) =
√k
g· tan
[√g
k(−k t+ C)
].

Ecuatii diferentiale autonome x = g(x) 7
Constanta C se determina din conditia initiala v(0) = 100 (m/s) si se obtine
C =
√k
g· arctan
(√k
g· 100
)
iar timpul t1 dupa care racheta ajunge la ınaltimea maxima se determina dinconditia v(t1) = 0 si se obtine
t1 =arctan
(100√
kg
)
√g k
(s)
ii) Pentru a gasi ınaltimea maxima la care se ridica racheta se noteaza cux(t) ınaltimea la care se afla racheta la momentul t. Functia x(t) este ne-cunoscuta si pentru determinarea ei se tine seama ca viteza v(t) este derivatafunctiei x(t):
dx
dt=
√g
k· tan
[√g
k
(−k t+
√k
g· arctan
(√k
g· 100
))]
si ca x(0) = 0 (racheta pleaca de pe sol). Determinarea functiei x(t) careverifica aceste conditii este o problema Cauchy de forma x = f(t), x(t0) = x0
si rezolvarea ei a fost facuta ın §1.1. Se determina solutia x(t; 0, x0) a proble-mei Cauchy si se calculeaza apoi x(t1; 0, x0). Aceasta este ınaltimea maximala care se ridica racheta meteorologica.
Rationamentul prezentat la rezolvarea punctului i) al problemei 1.2.1poate fi generalizat pentru determinarea solutiilor unei ecuatii diferentialede forma:
x = g(x) (1.10)
ın care g este o functie reala continua definita pe un interval J ⊂ IR1, carenu se anuleaza (g(x) 6= 0 (∀)x ∈ J) si este cunoscuta.
Intr-adevar, daca o functie reala x : I → J este o solutie a ecuatiei (1.10)atunci pentru orice t ∈ I avem
dx
dt= g(x(t))
sau1
g(x(t))· dxdt
= 1.

8 CAPITOLUL 1
Trecand la primitive rezulta egalitatea
∫ t
t∗
1
g(x(τ))· dxdτ
dτ =
∫ t
t∗dτ
din care printr-o schimbare de variabila se obtine
∫ x
x∗
1
g(u)du = t+ C. (1.11)
Rezulta ın acest fel ca o solutie x = x(t) a ecuatiei diferentiale (1.10) estesolutie pentru ecuatia implicita
G(t, x;C) = 0 (1.12)
ın care
G(t, x;C) = t+ C −∫ x
x∗
1
g(u)du. (1.13)
Este usor de aratat folosind teorema functiilor implicite ca, daca x(t;C)este o solutie a ecuatiei (1.12), atunci este si solutie a ecuatiei diferentiale(1.10).
Observatia 1.2.1 Daca functia g se anuleaza ın x∗ ∈ J , atunci functiaconstanta x(t) = x∗ este solutie a ecuatiei diferentiale (1.10).
Observatia 1.2.2 Pentru t0 ∈ IR1 si x0 ∈ J , problema determinarii aceleisolutii a ecuatiei (1.10) care verifica conditia suplimentara x(t0) = x0 senumeste problema Cauchy sau problema cu date initiale:
x = g(x)
x(t0) = x0 (1.14)
iar solutia acesteia, x = x(t; t0, x0), este data de ecuatia implicita:
∫ x
x0
1
g(u)du = t− t0. (1.15)
Intr-o problema Cauchy t0 si x0 sunt considerate cunoscute si se numesc dateinitiale.

Ecuatii diferentiale autonome x = g(x) 9
Concluzii
1. Exista probleme de fizica care conduc la ecuatii diferentiale de formax = g(x) ın care g este o functie reala continua definita pe un intervaldeschis (c, d) ⊂ IR1 si nu se anuleaza.
2. Oricare ar fi solutia x(t) a ecuatiei diferentiale x = g(x) si oricare arfi x∗ ∈ (c, d) exista o constanta scalara C astfel ıncat x(t) este solutia
ecuatiei implicite
∫ x
x∗
1
g(u)du− t−C = 0 si reciproc, o solutie a acestei
ecuatii implicite este solutie pentru ecuatia diferentiala.
3. Oricare ar fi t0 ∈ IR1 si x0 ∈ (c, d) exista o functie unica x = x(t)definita pe un interval deschis I0 (care contine pe t0) si cu valori ın(c, d) care este solutia problemei cu date initiale x = g(x), x(t0) = x0.
4. Daca functia g se anuleaza ıntr-un punct x∗ ∈ (c, d) atunci functiaconstanta x(t) ≡ x∗ este solutie a ecuatiei diferentiale.
Exercitii
1. Sa se determine solutiile urmatoarelor ecuatii diferentiale (cu calcula-torul):
a) x = 1 + x2, x ∈ IR1 R: x(t) = tan(t+ C), t+ C 6= (2k + 1) · π2
b) x = e−x, x ∈ IR1 R: x(t) = ln(t+ C), t+ C > 0
c) x = k · x, x > 0 R: x(t) = C · ek t, C > 0, t ∈ IR1
d) x = k · x, x < 0 R: x(t) = C · ek t, C < 0, t ∈ IR1
e) x = x2, x > 0 R: x(t) = − 1
t+ C, t+ C < 1

10 CAPITOLUL 1
2. Sa se rezolve urmatoarele probleme Cauchy si sa se reprezinte graficsolutiile cu calculatorul:
a) x = k x, x(0) = x0 R: x(t) = x0 ekt
b) x = −x+ x2, x(0) = x0 R: x(t) =x0
x0 − et(x0 − 1)
c) x = 1 + x2, x(0) = x0 R: x(t) = tan(t+ arctan x0)
d) x = x2, x(0) = x0 R: x(t) = − x0
t x0 − 1

Ecuatii diferentiale cu variabile separate 11
1.3 Ecuatii diferentiale cu variabile
separate
O ecuatie diferentiala cu variabile separate are forma
x = f(t) · g(x), (1.16)
unde f si g sunt functii reale continue, f : (a, b) → IR1, g : (c, d) → IR1
si se considera cunoscute. Daca functia g nu se anuleaza pe intervalul (c, d)(g(x) 6= 0, (∀)x ∈ (c, d)) atunci solutiile ecuatiei (1.16) se determina facandu-se un rationament asemanator cu cel din paragraful precedent.
Daca x : I ⊂ (a, b) → (c, d) este o solutie a ecuatiei (1.16) atunci pentruorice t ∈ I are loc
dx
dt= f(t) · g(x(t))
sau1
g(x(t))· dxdt
= f(t)
Trecand la primitive rezulta
∫ t
t∗
1
g(x(τ))· dxdτ
dτ =
∫ t
t∗f(τ)
care printr-o schimbare de variabila conduce la egalitatea
∫ x
x∗
1
g(u)du =
∫ t
t∗f(τ) + C. (1.17)
Am obtinut ın acest fel ca o solutie a ecuatiei (1.16) este solutie pentruecuatia implicita
G(x, t;C) = 0 (1.18)
ın care functia G(x, t;C) este data de egalitatea:
G(x, t;C) =
∫ t
t∗f(τ) + C −
∫ x
x∗
1
g(u)du. (1.19)
Folosind teorema functiilor implicite se arata usor ca daca x(t, C) este osolutie a ecuatiei (1.18) atunci este solutie si a ecuatiei diferentiale (1.16).

12 CAPITOLUL 1
Exemplul 1.3.1 Sa se determine solutiile ecuatiei diferentiale:
x =1
1 + t2(1 + x2), t ∈ IR1, x ∈ IR1
In acest caz f : IR1 → IR1, f(t) = 11+t2
si g : IR1 → IR1, g(x) = 1 + x2, iar
G(t, x;C) = arctan t+ C − arctanx
Ecuatia implicita este:
arctan t+ C − arctan x = 0
de unde
x(t) = tan(arctan t+ C)
Observatia 1.3.1 Daca functia g din ecuatia (1.16) se anuleaza ıntr-unpunct x∗ ∈ (c, d) atunci functia constanta x(t) = x∗ este solutia ecuatieidiferentiale (1.16).
Observatia 1.3.2 Pentru t0 ∈ (a, b) si x0 ∈ (c, d) problema determinariiacelei solutii a ecuatiei (1.16) care verifica conditia suplimentara x(t0) = x0
se numeste problema Cauchy sau problema cu date initiale si se noteaza cu
x = f(t) · g(x), x(t0) = x0. (1.20)
Solutia acestei probleme se noteaza de obicei cu x = x(t; t0, x0) si este datade ecuatia implicita ∫ x
x0
du
g(u)−∫ t
t0
f(τ)dτ = 0. (1.21)
Intr-o problema Cauchy, t0 si x0 sunt considerate cunoscute si se numescconditii initiale.
Observatia 1.3.3 O clasa particulara importanta de ecuatii diferentiale cuvariabile separate sunt ecuatiile diferentiale de ordinul ıntai liniare si omo-gene. Aceste ecuatii sunt de forma
x = A(t) · x, t ∈ (a, b), x ∈ IR1 (1.22)

Ecuatii diferentiale cu variabile separate 13
ın care A(t) este o functie reala continua pe (a, b). Conform celor aratate,solutiile ecuatiei (1.22) sunt date de formula
x(t) = C · e∫ t
t∗A(τ)dτ (1.23)
ın care C este o constanta reala oarecare.Solutia problemei Cauchy
x = A(t) · x, x(t0) = x0 t0 ∈ (a, b), x0 ∈ IR1 (1.24)
este data de formula:
x(t; t0, x0) = x0 · e∫ tt0
A(τ)dτ. (1.25)
Problema 1.3.1 O paine scoasa din cuptor are temperatura 100C si capatatemperatura de 60C ın decurs de 20 minute. Temperatura aerului fiind de20C, peste cat timp, ıncepand din momentul racirii, painea va capata tem-peratura de 25C?
Rezolvare:Notam cu x(t) temperatura painii la momentul t si folosim legea lui New-
ton dupa care, viteza de racire a unui corp cu temperatura x(t), situat ıntr-unmediu cu temperatura x0, este proportionala cu diferenta x(t) − x0:
x(t) = k [x(t) − x0].
Functia y(t) = x(t) − x0 verifica ecuatia
y(t) = k · y(t)
care este o ecuatie liniara si omogena. Rezulta
y(t) = C ek t
si astfelx(t) = x0 + C ek t.
In aceasta egalitate x0 = 20C. Pentru determinarea constantelor C si ktinem seama de conditiile x(0) = 100C si x(20) = 60C. Rezulta x(t) =
20C + 80C ·(
1
2
) t20
. Daca t∗ este timpul dupa care temperatura devine
25C rezulta 25C = 20C + 80C ·(
1
2
) t∗
20
, de unde t∗ = 80 minute.

14 CAPITOLUL 1
Concluzii
1. Exista probleme de fizica care conduc la ecuatii diferentiale de formax = f(t) · g(x), numite ecuatii cu variabile separate, ın care f si g suntfunctii reale continue, functia f este definita pe un interval (a, b) ⊂ IR1,iar functia g este definita pe un interval (c, d) ⊂ IR1 si nu se anuleazaın nici un punct (g(x) 6= 0, (∀)x ∈ (c, d)).
2. Oricare ar fi solutia x(t) a ecuatiei diferentiale cu variabile separate sioricare ar fi t∗ ∈ (a, b) si x∗ ∈ (c, d), exista o constanta C astfel ıncatx(t) este solutia ecuatiei implicite
∫ x
x∗
du
g(u)−∫ t
t∗f(τ)dτ − C = 0
si reciproc, oricare ar fi t∗ ∈ (a, b), x∗ ∈ (c, d) si C ∈ IR1, o solutiex = x(t) a ecuatiei implicite este solutie pentru ecuatia diferentiala.
3. Oricare ar fi t0 ∈ (a, b) si x0 ∈ (c, d) exista o functie unica x = x(t)definita pe un interval deschis I0 (care contine punctul t0) si cu valoriın intervalul (c, d), x : I0 ⊂ (a, b) → (c, d) care este solutia problemeicu date initiale x = f(t) · g(x), x(t0) = x0.
4. Daca functia g se anuleaza ıntr-un punct x∗ ∈ (c, d) atunci functiaconstanta x(t) = x∗ este solutie a ecuatiei diferentiale.
Exercitii
1. Sa se determine solutiile urmatoarelor ecuatii diferentiale (cu calcula-torul):
a) x = − t√1 + t2
·√
1 + x2
x, x < 0, t ∈ IR1 R:
√x2+1+
√t2+1 = C
b) x =t
1 + t(1 − x), t > −1, x > 1 R:
1 + t
1 − x= C · et
c) x =
(1 +
1
t
)· x
2 + 1
x2 + 2, t > 0, x ∈ IR1 R: x+arctanx=ln t+t+C

Ecuatii diferentiale cu variabile separate 15
2. Sa se rezolve urmatoarele probleme Cauchy si sa se reprezinte solutiile (cucalculatorul):
a) x =√t x, t > 0, x > 0, t0 =1, x0 =0
R: x(t) = 0
b) x=−2t
√4−x2
x, t∈IR1, x∈(0, 2), t0 =0, x0 =1
R:√
4−x2−t2−√
3=0
c) x=1
1−t ·1−x2
x, t < 1, x∈(0, 1), t0 =0 x0 =
1
2
R: x(t)=
√−3
4t2+
3
2t+
1
4

16 CAPITOLUL 1
1.4 Ecuatii omogene ın sens Euler
Ecuatiile omogene ın sens Euler sunt ecuatii de forma
x =P (t, x)
Q(t, x)(1.26)
ın care functiile P (t, x) si Q(t, x) sunt functii omogene ın sens Euler de acelasigrad, considerate cunoscute:
P (λt, λx) = λk · P (t, x) si Q(λt, λx) = λk ·Q(t, x). (1.27)
Din (1.27) rezulta egalitatea:
P (t, x)
Q(t, x)=P(1, x
t
)
Q(1, x
t
) , (∀)t 6= 0 (1.28)
si prin urmare ecuatia omogena (1.26) are forma canonica
x = g(xt
), (∀)t 6= 0 (1.29)
ın care
g(xt
)=P(1, x
t
)
Q(1, x
t
) .
Functia reala g este considerata continua si cunoscuta.Pentru determinarea solutiilor ecuatiei (1.29) se introduc noile functii
necunoscute y =x
tcare verifica ecuatia:
y =1
t[g(y) − y]. (1.30)
Ecuatiile diferentiale (1.26) si (1.30) sunt echivalente ın sensul urmator: daca
o functie x(t) este solutie pentru ecuatia (1.26) atunci functia y(t) =x(t)
teste solutie pentru ecuatia (1.30) si reciproc.
In acest fel, rezolvarea ecuatiei omogene ın sens Euler se reduce la re-zolvarea ecuatiei cu variabile separate (1.30).
Problema 1.4.1 Ce suprafata de rotatie trebuie sa reprezinte oglinda unuiproiector, pentru ca toate razele de lumina ce pleaca de la o sursa punctiformasa fie reflectate paralel cu o directie data?
Ecuatii omogene ın sens Euler 17
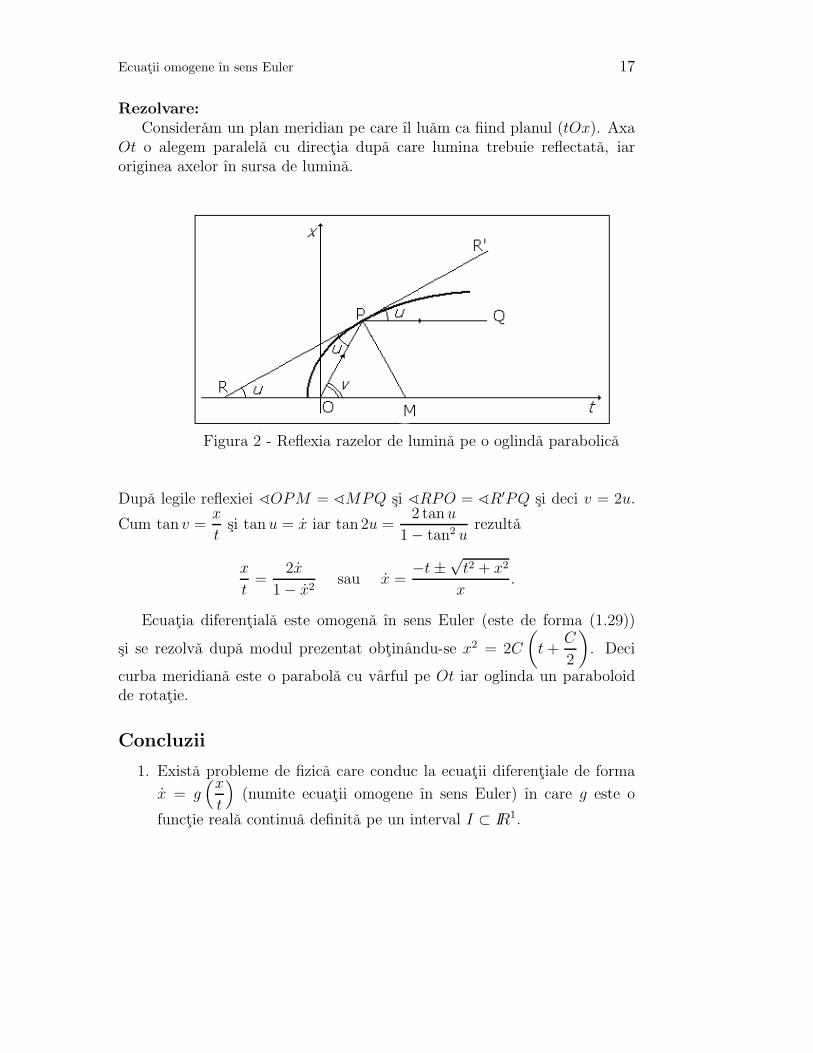
Rezolvare:Consideram un plan meridian pe care ıl luam ca fiind planul (tOx). Axa
Ot o alegem paralela cu directia dupa care lumina trebuie reflectata, iaroriginea axelor ın sursa de lumina.
Figura 2 - Reflexia razelor de lumina pe o oglinda parabolica
Dupa legile reflexiei ∢OPM = ∢MPQ si ∢RPO = ∢R′PQ si deci v = 2u.
Cum tan v =x
tsi tan u = x iar tan 2u =
2 tanu
1 − tan2 urezulta
x
t=
2x
1 − x2sau x =
−t±√t2 + x2
x.
Ecuatia diferentiala este omogena ın sens Euler (este de forma (1.29))
si se rezolva dupa modul prezentat obtinandu-se x2 = 2C
(t+
C
2
). Deci
curba meridiana este o parabola cu varful pe Ot iar oglinda un paraboloidde rotatie.
Concluzii
1. Exista probleme de fizica care conduc la ecuatii diferentiale de forma
x = g(xt
)(numite ecuatii omogene ın sens Euler) ın care g este o
functie reala continua definita pe un interval I ⊂ IR1.

18 CAPITOLUL 1
2. O functie x = x(t) este solutie a ecuatiei x = g(xt
)daca si nu-
mai daca functia y =x
teste solutie a ecuatiei cu variabile separate
y = 1t[g(y) − y].
3. Rezolvarea problemei Cauchy x = g(xt
), x(t0) = x0 se reduce la
rezolvarea problemei Cauchy y =1
t[g(y) − y], y(t0) = y0 =
x0
t0.
Exercitii
1. Sa se determine solutiile urmatoarelor ecuatii diferentiale:
a) x =x
t+ e
xt R: ln(t) = e−
xt + C
b) x =x2 + t2
t · x R: x2 = 2t2 ln(t) + C · t2
c) x =t+ x
t− xR: arctan
x
2−ln
√x2
t2+1=ln t+C
d) x =x
t− 2√tx
R:
√t
x− ln
x
t= ln t+ C
2. Sa se rezolve urmatoarele probleme Cauchy si sa se reprezinte graficsolutiile (cu calculator):
a) x =4tx− x2
2t2, t0 = 1, x0 = 1 R: x(t) =
2t2
t+ 1
b) x =2tx
3t2 − x2, t0 = 0, x0 = 0 R: x(t) = 0
c) x =2t+ x
4t− x, t0 = 1, x0 = 1 R: x(t) = t
d) x = − x+ t
5x+ t, t0 = 1, x0 = 0 R: x(t)=−1
5t+
1
5
√−4t2+5

Ecuatii omogene generalizate 19
1.5 Ecuatii omogene generalizate
Ecuatiile omogene generalizate sunt ecuatii diferentiale de forma:
x = f
(at+ bx+ c
a1t+ b1x+ c1
)(1.31)
ın care functia reala f este considerata continua si cunoscuta, si unde c21+c2 6=
0 (daca c1 = c = 0, ecuatia este omogena ın sens Euler). Pentru determinareasolutiilor acestei ecuatii tinem seama de urmatoarele rezultate:
Propozitia 1.5.1 Dacaa
a16= b
b1atunci ın urma schimbarii de variabila
independenta t si de functie necunoscuta x definite de formulele:
τ = t− t0 si y = x− x0 (1.32)
ecuatia diferentiala (1.31) se transforma ın ecuatia diferentiala omogena ınsens Euler:
dy
dτ= f
(aτ + by
a1τ + b1y
)(1.33)
unde (t0, x0) este solutia sistemului de ecuatii algebriceat+ bx+ c = 0a1t+ b1x+ c1 = 0.
(1.34)
Demonstratie: Prin calcul.
In urma schimbarii de functie necunoscuta definita prin
z =y
τ(1.35)
ecuatia (1.33) se transforma ın ecuatia diferentiala cu variabile separate
dz
dτ=
1
τ
[f
(a + bz
a1 + b1z
)− z
]. (1.36)
Propozitia 1.5.2 Dacaa
a1
=b
b1= m, atunci ın urma schimbarii de functie
necunoscuta x definita de
y(t) = a1t+ b1x(t) (1.37)
ecautia diferentiala (1.31) se transforma ın ecuatia diferentiala autonoma
y = a1 + b1 · f(my + c
y + c1
). (1.38)

20 CAPITOLUL 1
Exercitii
1. Sa se rezolve urmatoarele ecuatii diferentiale:
a) x=3t−4x+7
4t−5x+11R: x(t)=−5− 1
C
[−4
5(t+1)+
1
5
√(t+9)2C2+5
]
b) x=−3t+3x−1
t+x+1R: −1
2(x+t)−ln(x+t−1)= t+C
c) x=2(x+2)2
(t+x+2)2R: 2 arctan
−x−2
t−ln
−x−2
t−ln t−C=0

Ecuatii diferentiale liniare de ordinul ıntai 21
1.6 Ecuatii diferentiale liniare de ordinul ıntai
O ecuatie diferentiala de forma
x = A(t)x+B(t) (1.39)
se numeste ecuatie diferentiala liniara de ordinul ıntai. In ecuatia (1.39) Asi B sunt functii reale continue A,B : (a, b) → IR1 si se considera cunoscute.
Daca functia B este identic nula, atunci ecuatia (1.39) se numeste ecuatiediferentiala de ordinul ıntai liniara omogena si solutiile ei sunt date de for-mula:
x(t) = C · e∫ t
t∗A(τ)dτ (1.40)
ın care C este o constanta reala oarecare (a se vedea §1.3).Pentru a determina solutiile ecuatiei (1.39) remarcam faptul ca diferenta
a doua solutii ale acestei ecuatii este o solutie a ecuatiei liniare si omogene.Acest fapt se verifica usor prin calcul. Rezulta de aici ca daca x este o solutieoarecare a ecuatiei (1.39) si x este o solutie fixata a ecuatiei (1.39), atuncidiferenta x− x este solutie pentru ecuatia liniara si omogena, si prin urmare
x(t) − x(t) = C · e∫ t
t∗A(τ)dτ
saux(t) = C · e
∫ tt∗
A(τ)dτ + x(t). (1.41)
Egalitatea (1.41) arata ca o solutie oarecare x(t) a ecuatiei (1.39) se obtineadaugand la o solutie particulara x(t) a acestei ecuatii, o solutie oarecare a
ecuatiei liniare si omogene x(t) = C · e∫ t
t∗A(τ)dτ . In acest mod determinarea
tuturor solutiilor ecuatiei (1.39) se reduce la determinarea unei solutii par-ticulare a acestei ecuatii.
Determinarea unei solutii particulare a ecuatiei (1.39) se face cu ”metodavariatiei constantei a lui Lagrange”.Aceasta ınseamna ca pentru ecuatia (1.39)se cauta o solutie particulara x(t) care are forma functiei data de (1.40),deosebirea fiind ca C nu mai este o constanta reala ci este o functie de t(C = C(t)):
x(t) = C(t) · e∫ t
t∗A(τ)dτ . (1.42)
Pentru a impune functiei x(t) sa verifice ecuatia (1.39) se admite cafunctia C(t) este derivabila si din faptul ca x(t) verifica (1.39) se obtine:
C(t) e∫ t
t∗A(τ)dτ + A(t)C(t) e
∫ t
t∗A(τ)dτ = A(t)C(t) e
∫ t
t∗A(τ)dτ +B(t)

22 CAPITOLUL 1
sauC(t) = B(t) e−
∫ tt∗
A(τ)dτ . (1.43)
In §1.1 am vazut ca toate functiile care verifica (1.43) sunt date de
C(t) =
∫ t
t∗B(u) e−
∫ ut∗
A(τ)dτdu+ C ′ (1.44)
Intrucat avem nevoie de o singura solutie, consideram C ′ = 0 si ınlocuind ın(1.42) avem:
x(t) =
(∫ t
t∗B(u) e−
∫ u
t∗A(τ)dτdu
)e∫ t
t∗A(τ)dτ (1.45)
Rezulta ın acest mod ca toate solutiile ecuatiei (1.39) sunt date de:
x(t) = C e∫ t
t∗A(τ)dτ +
(∫ t
t∗B(u) e−
∫ u
t∗A(τ)dτdu
)e∫ t
t∗A(τ)dτ . (1.46)
Pentru t0 ∈ (a, b) si x0 ∈ IR1 ecuatia (1.39) are o singura solutie x careverifica x(t0) = x0 si este data de formula:
x(t; t0, x0) = x0 e∫ t
t0A(τ)dτ
+
∫ t
t0
B(u) e∫ t
uA(τ)dτdu. (1.47)
Problema 1.6.1 Unei bobine cu inductanta L = 1 (H) si rezistenta R =2 (Ω) i se aplica tensiunea electromotoare u = sin 3t (V ). Care este intensi-tatea curentului prin bobina?
Rezolvare:Legea lui Kirchoff aplicata circuitului format din bobina si sursa de ten-
siune ne daL · x+R · x = sin 3t,
x(t) fiind intensitatea curentului. Tinand seama de datele numerice rezultaecuatia diferentiala liniara de ordinul ıntai
x+ 2x = sin 3t.
Conform celor aratate obtinem ca intensitatea curentului este:
x(t) =3
13e−2t +
2
13sin 3t− 3
13cos 3t.
(S-a considerat ca la momentul initial intensitatea curentului ın circuit estezero).

Ecuatii diferentiale liniare de ordinul ıntai 23
Concluzii
1. Exista probleme de fizica care conduc la ecuatii diferentiale de formax = A(t)x+B(t) (numite ecuatii diferentiale liniare de ordinul ıntai) ıncare A,B sunt functii reale continue definite pe un interval real I ⊂ IR1.
2. Oricare ar fi solutia x = x(t) a ecuatiei si oricare ar fi t∗ ∈ I exista oconstanta reala C astfel ıncat sa avem
x(t) = C e∫ t
t∗A(τ)dτ +
∫ t
t∗e∫ tτ
A(s)dsB(τ)dτ, (∀)t ∈ I.
3. Oricare ar fi t0 ∈ (a, b) si x0 ∈ IR1 exista o singura functie x = x(t)definita pe I care este solutia problemei cu date initiale x = A(t)x +B(t), x(t0) = x0 si aceasta functie este data de formula:
x(t) = x0 e∫ t
t0A(τ)dτ
+
∫ t
t0
e∫ t
τA(s)dsB(τ)dτ.
Exercitii
1. Sa se rezolve urmatoarele ecuatii diferentiale (cu calculatorul):
a) x =1
tx− 1 R: x(t) = t (− ln t+ C)
b) x=− 2
t2−1x+2t+2 R: x(t) =
(−t2 + 2t+ C) (t+ 1)2
1 − t2
c) x=− 2
t2−1x+
4t
1−t2 R: x(t)=
(4 ln(t+1)+
4
t+1+C
)· (t+1)2
1−t2
d) x = x− t2 R: x(t) = t2 + 2t+ 2et C

24 CAPITOLUL 1
2. Sa se rezolve urmatoarele probleme cu date initiale si sa se reprezintegrafic solutiile lor (cu calculatorul):
a) x=−2tx+ t3, t0 =0, x0 =e−1
2R: x(t)=
1
2t2−1
2+
1
2e−t2+1
b) x=1
tx− ln t, t0 =1, x0 =1 R: x(t)=
(−1
2ln2 t+1
)t
c) x=−x+ 2et, t0 =0, x0 =2 R: x(t)=et + e−t
d) x=−ax+bep t, t0 =0, x0 =1 R: x(t)=(be(p+a)t−b+p+a
)·e
−a t
a+p

Ecuatia diferentiala a lui Bernoulli 25
1.7 Ecuatia diferentiala a lui Bernoulli
Ecuatia diferentiala a lui Bernoulli are forma
x = A(t) x+B(t) xα (1.48)
ın care functiile A si B sunt functii reale continue A,B : (a, b) → IR1 sise considera cunoscute, α este un numar real diferit de 0 si 1 cunoscut, iarfunctia necunoscuta x(t) este pozitiva.
Pentru a determina solutiile x (pozitive) ale ecuatiei (1.48) se introduceo noua functie necunoscuta y = x1−α. Aceasta verifica ecuatia:
dy
dt= (1−α)A(t) y + (1−α)B(t). (1.49)
Ecuatia (1.49) este o ecuatie liniara de ordinul ıntai si solutiile ei sunt datede formula:
y(t) = C e(1−α)∫ tt∗
A(τ)dτ + (1.50)
+
((1−α)
∫ t
t∗B(u) e−(1−α)
∫ u
t∗A(τ)dτdu
)e(1−α)
∫ t
t∗A(τ)dτ .
Solutiile pozitive x(t) ale ecuatiei (1.48) se determina din y(t) cu formula
x(t) = y(t)1
1−α si ın general sunt definite pe (a, b).Pentru t0 ∈ (a, b) si x0 > 0 ecuatia (1.48) are o solutie care verifica
x(t0) = x0 si este data de formula
x(t; t0, x0) = y1
1−α (t; t0, x0) (1.51)
unde:
y(t; t0, y0) = y0 e(1−α)
∫ tt∗
A(τ)dτ + (1−α)
∫ t
t0
B(u) e−(1−α)∫ t
uA(τ)dτdu (1.52)
si y0 = x1−α0 .
Observatia 1.7.1 Ecuatia Bernoulli apare ın studiul miscarii corpurilor ınmedii care opun o rezistenta la miscare de forma R = k1v + k2v
α, v fiindviteza corpului.
26 CAPITOLUL 1
Problema 1.7.1 Sa se determine curba r = r(u) stiind ca aria sectoarelorlimitate de curba, raza vectoare a punctului P0(r0, u0) si raza vectoare a punc-tului P (r, u) este proportionala cu produsul r·u, coeficientul de proportionalitatefiind a.
Rezolvare:Conform enuntului avem:
1
2
∫ u
u0
r2du = a r u
din care prin derivare obtinem:
r2 = 2a (r u+ r)
care este o ecuatie Bernoulli.
Concluzii
1. Exista probleme de fizica care conduc la ecuatii diferentiale de formax = A(t) x+ B(t) xα, (α ∈ IR1, α 6= 0, 1) (numita ecuatia diferentialaa lui Bernoulli) ın care A,B sunt functii reale continue definite pe uninterval I ⊂ IR1.
2. O functie pozitiva x = x(t) este solutie a ecuatiei Bernoulli daca sinumai daca functia y(t) = [x(t)]1−α este solutie a ecuatiei diferentialeliniare de ordinul ıntai y = (1−α)A(t) y + (1−α)B(t).
3. Determinarea solutiilor pozitive ale ecuatiei Bernoulli se reduce la re-zolvarea unei ecuatii diferentiale liniare de ordinul ıntai.

Ecuatia diferentiala a lui Bernoulli 27
Exercitii
1. Sa se determine solutiile pozitive ale ecuatiilor:
a) x = −1
tx+
1
t2x2 R: x(t) =
2t
1 + 2t2C
b) x = 4tx+ tx1/2 R:
√x(t) = −
(−1
2ln t+ C
)· t2 = 0
c) x = −1
tx+ tx2 R: x(t) = − 1
(t− C) t
d) x =1
tx− 2tx2 R: x(t) =
3t
2t3 + 3C
2. Sa se rezolve urmatoarele probleme Cauchy:
a) x=−1
tx+tx2, t0 =1, x0 =1 R: x(t) = − 1
t(t−2)
b) x=1
tx−2tx2, t0 =1, x0 =1 R: x(t)=
3t
2t3 + 1
c) x=2
tx+
1
2t2x2, t0 =1, x0 =1 R: x(t)=
2t2
3−t
28 CAPITOLUL 1
1.8 Ecuatia diferentiala a lui Riccati
Ecuatia diferentiala a lui Riccati are forma
x = A(t) x2 +B(t) x+ C(t) (1.53)
ın care A, B, C sunt functii reale A,B,C : (a, b) → IR1 continue (A(t) ≡ 0,C(t) ≡ 0) considerate cunoscute.
Propozitia 1.8.1 Daca x1(t) este o solutie fixata a ecuatiei (1.53) si x(t)este o solutie oarecare a aceleiasi ecuatii, atunci functia y(t) = x(t) − x1(t)este o solutie a ecuatiei Bernoulli
y = A(t) y2 + (2A(t) x1 +B(t)) y. (1.54)
Demonstratie: Se verifica prin calcul.Propozitia precedenta reduce determinarea solutiilor ecuatiei Riccati la
determinarea solutiilor unei ecuatii Bernoulli. Trebuie subliniat ca aceastareducere se face ın ipoteza ca se cunoaste o solutie x1(t) a ecuatiei Riccati. Ingeneral daca nu se cunoaste o solutie pentru ecuatia lui Riccati, determinareasolutiilor acestei ecuatii nu se poate face cu metode elementare.
Observatia 1.8.1 Prin schimbarea de functie y(t) = x(t)−x1(t) rezolvareaecuatiei lui Riccati (1.53) se reduce la rezolvarea unei ecuatii de tip Bernoullicare, conform cu §1.7 se reduce la o ecuatie diferentiala de ordinul ıntailiniara.
Observatia 1.8.2 Rezolvarea ecuatiei lui Riccati se poate reduce direct larezolvarea unei ecuatii diferentiale de ordinul ıntai liniara cu necunoscutaz(t) daca se face schimbarea de functie
x(t) =1
z(t)+ x1(t).

Ecuatia diferentiala a lui Riccati 29
Exercitii
1. Sa se determine solutiile urmatoarelor ecuatii diferentiale Riccati:
a) x=−sin t·x2+2sin t
cos2 t, x1(t)=
1
cos t
R: x(t)=1
cos t+
6 cos 2t+6
−cos 3t−3 cos t+12C
c) x = x2 − a
tx− a
t2, x1(t) =
a
t
R: x(t)=a
t+
a+1
−t+t−a(a+1)C
2. Sa se rezolve urmatoarele probleme Cauchy:
a) x = − 1
t(2t−1)x2+
4t+1
t(2t−1)x− 4t
t(2t−1), x1(t)=1, t0 =2, x0 =1
R: x(t)=t(2t−1)
5−t + 1
b) x = −x2 +4
tx− 4
t2, x1(t)=
1
t,t0 =1, x0 =0
R: x(t) =3
t(t+2)+
1
t

30 CAPITOLUL 1
1.9 Ecuatii cu diferentiala totala exacta.
Factor integrant
O ecuatie diferentiala de forma:
x = −P (t, x)
Q(t, x)(1.55)
este cu diferentiala totala exacta daca exista o functie U de clasa C1 cuproprietatea:
dU = P dt+Qdx. (1.56)
Acesta ınseamna ca exista o functie U de clasa C1 a carei diferentiala este
egala cu P dt+Qdx. Altfel spus, P =∂U
∂tsi Q =
∂U
∂x.
Propozitia 1.9.1 Daca ecuatia diferentiala (1.55) este cu diferentiala totalaexacta si o functie reala U = U(t, x) de clasa C1 are proprietatea (1.56),atunci pentru orice solutie x=x(t) a ecuatiei (1.55)
U(t, x(t))=const.
Demonstratie: Pentru a demonstra ca functia U(t, x(t)) nu depinde de t,se deriveaza ın raport cu t si se obtine:
d
dtU(t, x(t)) =
∂U
∂t+∂U
∂x· dxdt
= P (t, x(t))+Q(t, x(t))·(−P (t, x)
Q(t, x)
)=
= P (t, x(t)) − P (t, x(t)) = 0
Aceasta propozitie arata ca o solutie x(t) a ecuatiei cu diferentiala totalaexacta este o solutie a ecuatiei implicite:
U(t, x) = C (1.57)
ın care C este o constanta reala.Este usor de verificat ca si afirmatia reciproca este adevarata: o solutie
x = x(t) a ecuatiei implicite (1.57) este o solutie a ecuatiei cu diferentialatotala (1.55).
Astfel, determinarea solutiilor ecuatiei cu diferentiala totala (1.55) se re-duce la determinarea solutiilor ecuatiei implicite (1.57). Acest rezultat con-duce ın mod natural la urmatoarele doua probleme:

Ecuatii cu diferentiala totala exacta. Factor integrant 31
1. Cum ne dam seama ca ecuatia (1.55) este cu diferentiala totala?
2. Cum se determina o functie U = U(t, x) a carei diferentiala este egalacu P dt+Qdx?
Un raspuns la aceste ıntrebari este dat de urmatoarea propozitie.
Propozitia 1.9.2 Daca functiile P si Q sunt de clasa C1 pe un domeniu Ω
si∂P
∂x=∂Q
∂t, atunci pentru orice (t0, x0) ∈ Ω exista un r > 0 si o functie
reala U = U(t, x) definita pe discul centrat ın (t0, x0) si de raza r astfel ıncatsa aibe loc relatia (1.56).
Demonstratie: Pentru un punct (t0, x0) ∈ Ω se considera r > 0 astfel cadiscul centrat ın (t0, x0) si de raza r > 0 sa fie inclus ın Ω. Pornind de la faptul
ca pe disc trebuie sa avem∂U
∂t= P deducem ca U(t, x) =
∫ t
t0
P (τ, x)dτ+Ψ(x)
unde Ψ este o functie de clasa C1 necunoscuta. Impunand conditia∂U
∂x= Q
obtinem egalitatea:
∫ t
t0
∂P
∂x(τ, x) dτ + Ψ′(x) = Q(t, x).
Tinand seama acum de egalitatea∂P
∂x=∂Q
∂tdeducem ca:
∫ t
t0
∂Q
∂t(τ, x) dτ + Ψ′(x) = Q(t, x).
Efectuand integrarea se obtine egalitatea:
Q(t, x) −Q(t0, x) + Ψ′(x) = Q(t, x)
din care rezulta:
Ψ′(x) = Q(t0, x).
Prin urmare functia Ψ(x) este data de formula:
Ψ(x) =
∫ x
x0
Q(t0, y) dy + C (1.58)

32 CAPITOLUL 1
ın care C este o constanta reala. Revenind la functia U(t, x) obtinem caaceasta este data de formula:
U(t, x) =
∫ t
t0
P (τ, x) dτ +
∫ x
x0
Q(t0, y) dy + C. (1.59)
Formula aceasta defineste o multime de functii U(t, x) care au proprietateaexprimata prin relatia (1.56).
Comentariu: Propozitia arata ca egalitatea∂P
∂x=∂Q
∂teste o conditie
suficienta pentru ca sa existe ın vecinatatea oricarui punct (t0, x0) ∈ Ω ofunctie U(t, x) de clasa C2 astfel ca dU = P dt+Qdx.
Mentionam ca si reciproca acestei afirmatii este adevarata. Mai preciseste adevarata urmatoarea afirmatie: daca exista r > 0 si o functie U(t, x)de clasa C2 pe discul centrat ın (t0, x0) si raza r astfel ca dU = P dt+Qdxpentru orice (t, x) din acest disc, atunci functiile P si Q sunt de clasa C1
si∂P
∂x=∂Q
∂tpentru orice (t, x) din disc. Acest rezultat se obtine folosind
posibilitatea inversarii ordinii de derivare, stabilit de Schwartz.
Observatia 1.9.1 Daca functiile P si Q sunt de clasa C1 pe Ω ⊂ IR2
dar∂P
∂x6= ∂Q
∂tatunci ecuatia (1.55) nu este o ecuatie cu diferentiala totala
exacta si metoda prezentata nu poate fi utilizata pentru determinarea solutiilorecuatiei. In acest caz este util sa observam ca ecuatia (1.55) are aceleasisolutii ca si ecuatia
x = −P (t, x) · µ(t, x)
Q(t, x) · µ(t, x)(1.60)
ın care µ(t, x) este o functie de clasa C1 care nu se anuleaza.
Datorita acestui fapt apare natural sa ıncercam sa determinam functiaµ(t, x) astfel ca ecuatia (1.60) sa fie cu diferentiala totala. Impunand aceastaconditie rezulta ca functia µ(t, x) trebuie sa verifice relatia:
∂P
∂xµ+ P
∂µ
∂x=∂Q
∂tµ+Q
∂µ
∂t. (1.61)
O functie care verifica (1.61) se numeste factor integrant, iar relatia dedependenta functionala (1.61) se numeste ecuatia factorului integrant.

Ecuatii cu diferentiala totala exacta. Factor integrant 33
Exercitii
1. Sa se rezolve urmatoarele ecuatii cu diferentiale totale:
a) x =4tx− xetx
tetx − 2t2R: 2t2 x(t) + et x(t) = C
b) x=tm+2tx2+ 1
t
xn+2t2x+ 1x
R:tm+1
m+1+x(t)n+1
n+1+t2 x(t)2+ln(t x(t))=C
c) x = −2tx− 2x3
t2 − 6tx2R: t2 x(t) − 4t x(t)3 = C
2. Sa se rezolve urmatoarele probleme Cauchy:
a) x = −t+ x
t− x, t0 = 0, x0 = 1 R: x(t) = t+
√2t2 + 1
b) x = − t2
x2, t0 = 1, x0 = 1 R: x(t) = 3
√−t3 + 2
3. Sa se rezolve ecuatiile diferentiale stiind ca ele admit factor integrantµ = µ(t):
a) x = −t sin x+ x cosx
t cos x− x sin xR: µ(t) = et
et [(t− 1) sin x(t) + x(t) cosx(t)]=C
b) x = − 1 − t2 x
t2(x− t)R: µ(t) =
1
t2
x(t)2
2− t x(t) − 1
t= C

34 CAPITOLUL 1
4. Sa se rezolve ecuatiile diferentiale stiind ca ele admit factor integrantµ = µ(x):
a) x = −x(1 − t x)
−t R: µ(x) =1
x2
t
x(t)− t2
2= C
b) x = − 2t x
3x2 − t2 + 3R: µ(x) =
1
x2
t2
x(t)+ 3x(t) = C

Calculul simbolic al solutiilor ecuatiilor de ordinul ıntai 35
1.10 Calculul simbolic al solutiilor ecuatiilor
diferentiale de ordinul ıntai
Foarte multe dintre modelele matematice ale unor fenomene din realitatecontin cel putin o ecuatie diferentiala. Toate softurile comerciale de matema-tica (Maple, Mathematica, Mathcad) ofera posibiltatea sa rezolvam numericaceste probleme.
Exemplele de rezolvare numerica care sunt ın acest curs vor fi prezentateın programul Maple 9, versiune care acopera toate celelate versiuni de Mapleın momentul de fata.
Pentru rezolvarea numerica a ecuatiilor diferentiale cu programul Maple sefoloseste functia dsolve (solve ordinary differential equations - ODEs) cu unadin urmatoarele sintaxe :
dsolve(ODE);
dsolve(ODE, x(t), extra.args);
dsolve(ODE, ICs, x(t), extra.args);
ın care:
ODE - ecuatia diferentiala ordinara pe care dorim sa o rezolvamx(t) - functia necunoscuta pe care dorim sa o determinamICs - conditiile initialeextra.args - argumente optionale care se folosesc pentru schimbarea
formei de afisare a solutiei (explicita, implicita, parametrica),a metodei de rezolvare a ecuatiei (separarea variabilelor,Bernoulli, Riccati, etc.).
Pentru exemplificare, consideram ecuatia diferentiala de ordinul ıntai:
x =t
1 + t· (1 − x); t ∈ R − −1, x ∈ R − 1. (1.62)
Aceasta ecuatie este cu variabile separate (caz particular de ecuatie liniara).Prin utilizarea sintaxei dsolve(ODE) se obtine multimea solutiilor ecuatieidate (ecuatia familiei de curbe integrale scrisa sub forma explicita):

36 CAPITOLUL 1
> dsolve(diff(x(t),t)=(t/(1+t))*(1-x(t)));
x (t) =(
et
1+t+ C1
)(e−t + e−tt).
Daca dorim ca solutiile sa fie afisate sub forma parametrica, atunci sefoloseste argumentul optional ‘parametric‘ si obtinem:
> dsolve(diff(x(t),t)=(t/(1+t))*(1-x(t)),x(t),‘parametric‘);
x (t) = 1 − e−t
C1− e−tt
C1.
Se mai poate utiliza ca argument optional ”metoda de rezolvare aecuatiei”. Daca dorim sa se rezolve ecuatia diferentiala ca o ecuatieliniara, atunci se foloseste argumentul optional [linear] si obtinem:
> dsolve(diff(x(t),t)=(t/(1+t))*(1-x(t)),x(t),[linear]);
x (t) =(
et
1+t+ C1
)(e−t + e−tt),
iar daca dorim sa se rezolve ecuatia diferentiala ca fiind o ecuatiecu variabile separate, atunci folosim argumentul optional [separable] siobtinem:
> dsolve(diff(x(t),t)=(t/(1+t))*(1-x(t)),x(t),[separable]);
x (t) =( C1 et−1−t)e−t
C1.
Nespecificand metoda de rezolvare Maple va alege una dintre ele.
Deoarece ın secventele de mai sus nu s-a dat nici o conditie initiala, Maple aafisat raspunsul cu ajutorul unei constante necunoscute. Daca specificam siconditia initiala atunci calculatorul va rezolva o problema cu conditii initiale(Problema Cauchy) si va afisa solutia acesteia.
Pentru ecuatia diferentiala (1.62) vom considera doua Probleme Cauchydeoarece domeniul de definitie al membrului drept este reuniunea(−∞,−1) × IR1 ∪ (−1,+∞) × IR1.
Daca consideram t > −1 si conditia initiala x(2) = 4, atunci se obtinesolutia:
> dsolve(diff(x(t),t)=(t/(1+t))*(1-x(t)),x(2)=4,x(t));
x (t) =(
et
1+t− 1/3 e−2e2−4
e−2
)(e−t + e−tt),
iar daca consideram t < −1 si conditia initiala x(−2) = 0, atunci seobtine solutia:
> dsolve(diff(x(t),t)=(t/(1+t))*(1-x(t)),x(-2)=0,x(t));
Calculul simbolic al solutiilor ecuatiilor de ordinul ıntai 37
x (t) =(
et
1+t+ e−2
)(e−t + e−tt).
Pentru reprezentarea grafica a solutiei unei probleme cu date initiale, pro-gramul Maple foloseste functia plot (create a two-dimensional plot of func-tions).Utilizarea acesteia implica urmatoarea sintaxa:
plot(f,h,v);
ın care:
f - functia care trebuie reprezentata grafic;h - domeniul de definitie al functiei pe axa orizontala;v - (optional) domeniul de variatie al functiei pe axa verticala.
Solutia Problemei Cauchy a ecuatiei (1.62) corespunzatoare conditiei initialex(2) = 4 este reprezentata pe Figura 2.
> f1:=(exp(t)/(1+t)-1/3*(exp(-2)*exp(2)-4)/exp(-2))*
(exp(-t)+exp(-t)*t):
> plot(f1,t=-1..infinity);
Figura 2
iar solutia Problemei Cauchy corespunzatoare conditiei initiale x(−2) = 0este reprezentata pe Figura 3.
38 CAPITOLUL 1
Figura 3
Dupa cum se poate observa din instructiunile de mai sus s-a atribuit variabileif1 functia solutie a Problemei Cauchy si apoi am folosit ın instructiunea plot.In general, este recomandabil sa se atribuie unor expresii matematice vari-abile, deoarece aceasta simplifica scrierea.
In cele ce urmeaza, continuam exemplificarea rezolvand trei probleme cudate initiale si, ın fiecare caz, vom reprezenta grafic solutia:
1. Ecuatia liniarax = −x+ 2et (1.63)
> dsolve(diff(x(t),t)=-x(t)+2*exp(t),x(t),[linear]);
x (t) = et + e−t C1
> dsolve(diff(x(t),t)=-x(t)+2*exp(t),x(0)=2,x(t),[linear]);
x (t) = et + e−t
> plot(exp(t)+exp(-t),t=-2..2);
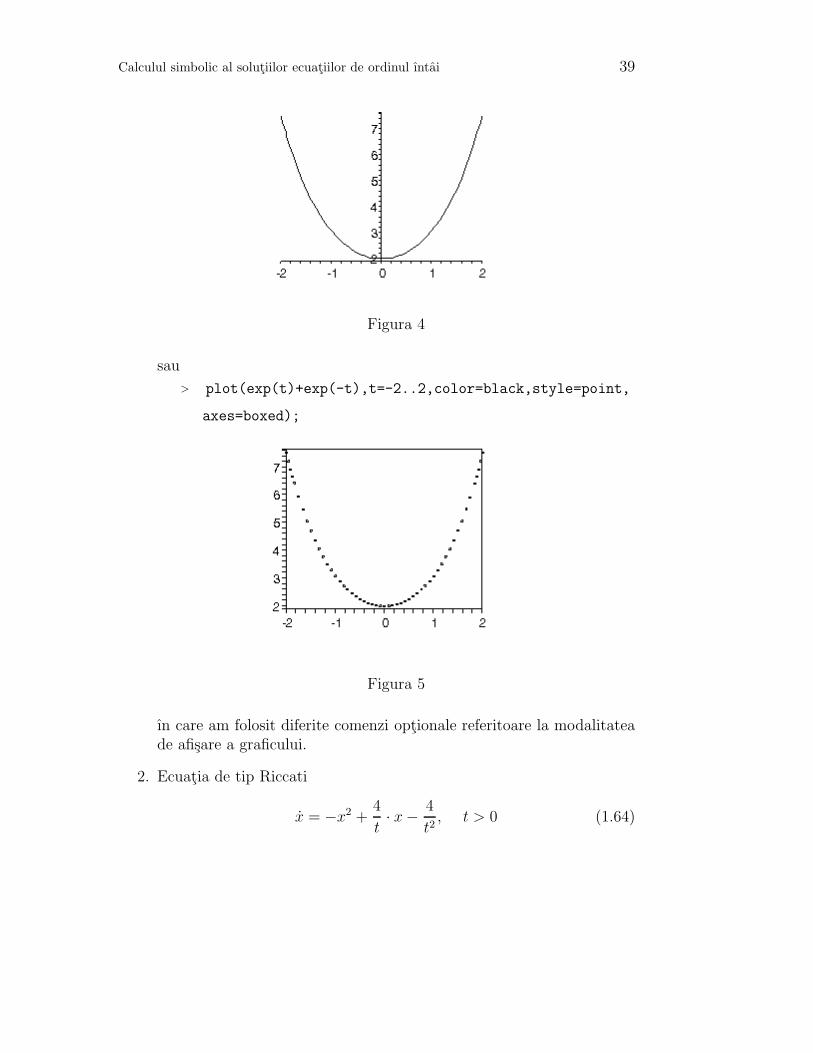
Calculul simbolic al solutiilor ecuatiilor de ordinul ıntai 39
Figura 4
sau
> plot(exp(t)+exp(-t),t=-2..2,color=black,style=point,
axes=boxed);
Figura 5
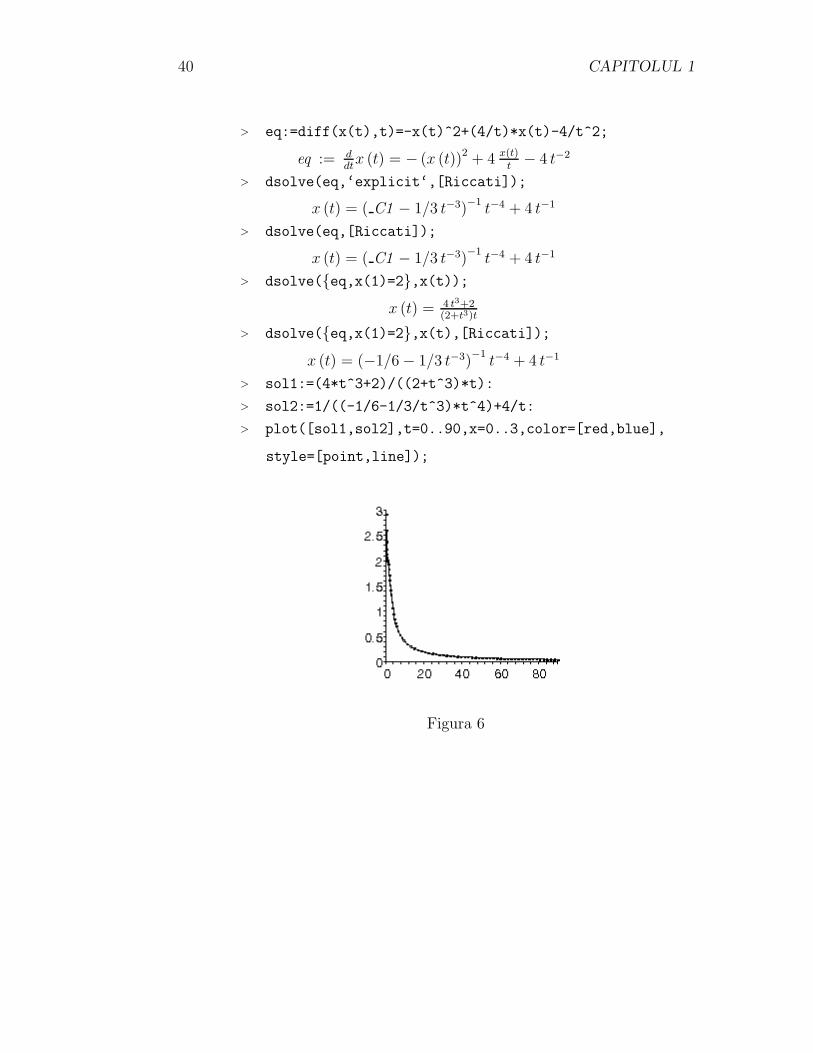
ın care am folosit diferite comenzi optionale referitoare la modalitateade afisare a graficului.
2. Ecuatia de tip Riccati
x = −x2 +4
t· x− 4
t2, t > 0 (1.64)
40 CAPITOLUL 1
> eq:=diff(x(t),t)=-x(t)^2+(4/t)*x(t)-4/t^2;
eq := ddtx (t) = − (x (t))2 + 4 x(t)
t− 4 t−2
> dsolve(eq,‘explicit‘,[Riccati]);
x (t) = ( C1 − 1/3 t−3)−1t−4 + 4 t−1
> dsolve(eq,[Riccati]);
x (t) = ( C1 − 1/3 t−3)−1t−4 + 4 t−1
> dsolve(eq,x(1)=2,x(t));x (t) = 4 t3+2
(2+t3)t
> dsolve(eq,x(1)=2,x(t),[Riccati]);x (t) = (−1/6 − 1/3 t−3)
−1t−4 + 4 t−1
> sol1:=(4*t^3+2)/((2+t^3)*t):
> sol2:=1/((-1/6-1/3/t^3)*t^4)+4/t:
> plot([sol1,sol2],t=0..90,x=0..3,color=[red,blue],
style=[point,line]);
Figura 6

Calculul simbolic al solutiilor ecuatiilor de ordinul ıntai 41
In secventele de mai sus observam ca, argumentul optional ın carecerem sa se afiseze solutia sub forma explicita este inutil, deoareceacest lucru este facut automat de dsolve. Deasemenea, daca folosimargumentul optional [Riccati] solutia ecuatiei difera doar aparent (celedoua solutii afisate coincid dupa cum se poate observa din Figura 6unde am reprezentat simultan ”ambele” forme ale solutiei ın acelasisistem de coordonate).
3. Ecuatia cu factor integrant
x = − 2 · t · x3x2 − t2 + 3
, 3x2 − t2 + 3 6= 0 (1.65)
> dsolve(diff(x(t),t)=-2*t*x(t)/(3*x(t)^2-t^2+3),‘explicit‘);
x (t) = −1/6 C1 ± 1/6√
C1 2 − 12 t2 + 36
> dsolve(diff(x(t),t)=-2*t*x(t)/(3*x(t)^2-t^2+3),‘implicit‘);
t2
x(t)+ 3 x (t) − 3 (x (t))−1 + C1 = 0
> dsolve(diff(x(t),t)=-2*t*x(t)/(3*x(t)^2-t^2+3),x(0)=1);x (t) = 1/6
√36 − 12 t2
> plot(1/6*(36-12*t^2)^(1/2), t=-1..1);
Figura 7

42 CAPITOLUL 1
Ecuatia cu factor integrant a fost rezolvata de Maple fara specificareafactorului integrant µ = µ(t, x) iar solutia a fost afisata sub formaexplicita ın primul caz, respectiv sub forma implicita ın al doilea caz. InFigura 7 este reprezentata solutia Problemei Cauchy corespunzatoare.
Capitolul 2
Ecuatii diferentiale de ordinsuperior rezolvabile prinmetode elementare
Definitia 2.0.1 O ecuatie diferentiala de ordinul n ≥ 2 este o relatie dedependenta functionala de forma
g(t, x, x, ..., x(n)) = 0 (2.1)
ıntre functia identica t 7→ t definita pe un interval I ⊂ IR1 necunoscut, ofunctie necunoscuta x(t) si derivatele ei x, x, ..., x(n) pana la ordinul n definitepe acelasi interval.
In ecuatia (2.1) functia g se considera cunoscuta si rezolvarea ecuatieiınseamna determinarea functiilor necunoscute x care verifica ecuatia.
Definitia 2.0.2 O functie reala x de clasa Cn definita pe un interval deschisI ⊂ IR1 se numeste solutie a ecuatiei (2.1) daca pentru orice t ∈ I, sistemulordonat (t, x(t), x(t), ..., x(n)(t)) apartine domeniului de definitie a lui g si
g(t, x(t), x(t), ..., x(n)(t)) = 0 (2.2)
Vom prezenta cateva cazuri de asemenea ecuatii care se rezolva cu metodeelementare si probleme concrete din diferite domenii care au condus la aseme-nea ecuatii.
43

44 CAPITOLUL 2
2.1 Ecuatii diferentiale liniare de ordinul al
doilea cu coeficienti constanti
Problema 2.1.1 Sa se determine variatia curentului ıntr-un circuit formatdintr-o rezintenta R, o bobina cu inductanta L si un condensator de capaci-tate C legati ın serie si conectati la o sursa de curent alternativ de tensiuneelectromotoare E = E0 · cos ωt
Rezolvare: Fie i(t) intensitatea curentului din circuit la momentul t. Caderilede tensiune pe elementele circuitului sunt:
uR = R · i;
uL = L · didt
;
uC =1
C
∫i(t)dt;
conform celei de-a doua legi a lui Kirchhoff, suma caderilor de tensiune pebobina, rezistenta si condensator este egala ın orice moment cu tensiuneaelectromotoare a generatorului. Prin urmare avem:
L · didt
+R · i+ 1
C
∫i(t)dt = E0 · cosωt,
iar prin derivare se obtine ca intensitatea a curentului verifica egalitatea:
L · d2i
dt2+R · di
dt+
1
Ci = −E0 · ω · sinωt. (∗)
Prin urmare avem de determinat o functie i(t) care ımpreuna cu derivateleei de ordinul ıntai si doi verifica relatia de dependenta functionala (∗). In (∗)cu exceptia functiei i totul este cunoscut.
Pentru a determina functia necunoscuta i(t) vom arata ın continuarecum se rezolva o ecuatie diferentiala liniara de ordinul al doilea cu coeficienticonstanti.
O ecuatie diferentiala liniara de ordinul al doilea cu coeficienti constantieste o ecuatie diferentiala de forma:
a2x+ a1x+ a0x = f(t) (2.3)
ın care a0, a1, a2 sunt constante reale cunoscute, a2 6= 0, f(t) functie continuacunoscuta si x este o functie reala de clasa C2 necunoscuta.

Ecuatii diferentiale de ordinul al doilea cu coeficienti constanti 45
Observatia 2.1.1 Daca f = 0 atunci ecuatia (2.3) se numeste ecuatie diferentialaliniara de ordinul doi cu coeficienti constanti omogena, iar daca f 6= 0 ecuatia(2.3) se numeste ecuatie diferentiala liniara de ordinul doi cu coeficienticonstanti neomogena.
Vom determina mai ıntai solutiile ecuatiei omogene urmand apoi sa de-terminam si solutiile ecuatiei neomogene.
Fie ecuatia omogena atasata ecuatiei (2.3):
a2x+ a1x+ a0x = 0 (2.4)
Daca a2 = 0 atunci ecuatia (2.4) este o ecuatie liniara de ordinul ıntai:
a1x+ a0x = 0
si solutiile ei sunt date de formula
x(t) = Ce− a0
a1t
ın care C este o constanta reala oarecare. Observam ca raportul −a0
a1din
exponent, este solutia ecuatiei algebrice a1 ·λ+a0 = 0, iar la formula solutiei
x(t) = Ce− a0
a1tse poate ajunge nu numai pe calea descrisa ın Capitolul 1 § 6
ci si cautand solutii de forma x(t) = Ceλt. Aceasta este ideea pe care o vomfolosi pentru a determina solutiile ecuatiei (2.4).
Impunand unei functii de forma x(t) = Ceλt sa verifice ecuatia (2.4)rezulta ca λ trebuie sa verifice ecuatia de gradul al doilea:
a2λ2 + a1λ+ a0x = 0. (2.5)
Daca radacinile λ1 si λ2 ale ecuatiei (2.5) sunt reale si distincte, atuncifunctiile
x1(t) = C1eλ1t si x2(t) = C2e
λ2t
sunt solutii ale ecuatiei (2.4) si functia
x(t) = C1eλ1t + C2e
λ2t
este de asemenea solutie a ecuatiei (2.4). Mai mult, pentru oricet0, x
00, x
10 ∈ IR1 putem determina ın mod unic constantele C1 si C2 astfel
ıncat sa aiba locx(t0) = x0
0 si x(t0) = x10. (2.6)

46 CAPITOLUL 2
In adevar, impunand conditiile (2.6) functiei x(t) = C1eλ1t + C2e
λ2t,obtinem urmatorul sistem de ecuatii algebrice:
x00 = C1e
λ1t0 + C2eλ2t0
x10 = C1e
λ1t0 + C2eλ2t0
ın care necunoscutele sunt C1 si C2.Determinantul acestui sistem este e(λ1+λ2)t0 · (λ2 − λ1) si este nenul
(λ1 6= λ2), fapt pentru care sistemul are o solutie unica.In particular rezulta de aici ca formula:
x(t) = C1eλ1t + C2e
λ2t (2.7)
reprezinta toate solutiile ecuatiei (2.4) ın cazul ın care ecuatia (2.5) areradacini reale distincte.
Daca ecuatia (2.5) are radacinile confundate λ1 = λ2 = λ atunci pe langafunctia x1(t) = C1e
λt si functia x2(t) = C2t · eλt este solutie a ecuatiei (2.4).Prin urmare orice functia x(t) de forma
x(t) = C1eλt + C2t · eλt
adicax(t) = eλt · (C1 + C2t) (2.8)
este solutie a ecuatiei (2.4).Mai mult, pentru orice t0, x
00, x
10 ∈ IR1 putem determina ın mod unic
constantele C1 si C2 astfel ıncat sa aibe loc x(t0) = x00 si x(t0) = x1
0.In adevar, impunand aceste conditii functiei data de (2.8) rezulta urmatorul
sistem de ecuatii algebrice:
x00 = eλt0(C1 + C2t0)
x10 = λeλt0 · C1 + C2e
λt0 + eλt0 · t0 · λ · C2
al carui determinant este e2λt0 6= 0.In particular rezulta de aici ca, formula (2.8) reprezinta toate solutiile
ecuatiei (2.4) ın cazul ın care ecuatia (2.5) are radacinile confundate.Ramane sa consideram cazul ın care ecuatia (2.5) are radacinile complex
conjugate λ1 = µ+ iν si λ2 = µ− iν. In acest caz consideram functiile
x1(t) = C1eµt · cos νt si x2(t) = C2e
µt · sin νt

Ecuatii diferentiale de ordinul al doilea cu coeficienti constanti 47
(C1, C2 constante reale) si aratam ca fiecare din acestea este solutie a ecuatiei(2.4).
Demonstratia se face prin verificare. Pentru exemplificare facem acestcalcul ın cazul functiei x1(t):
x1(t) = C1µ · eµt · cos νt− C1ν · eµt · sin νtx1(t) = C1µ
2 · eµt · cos νt− 2C1µν · eµt · sin νt− C1ν2 · eµt · cos νt
si ınlocuind ın ecuatia (2.5) avem:
a2x1 + a1x1 + a0x1 = C1 · eµt · cos νt[(µ2 − ν2)a2 + µa1 + a0
]+
+ C1 · eµt · sin νt [−2µνa2 − νa1] .
Deoarece
a2(µ+ iν)2 + a1(µ+ iν) + a0 = 0
avem
(µ2 − ν2)a2 + µa1 + a0 + i [2µνa2 + νa1] = 0
si prin urmare:
(µ2 − ν2)a2 + µa1 + a0 = 0 si 2µνa2 + νa1 = 0.
Tinand seama de aceste egalitati deducem egalitatea
a2x1 + a1x1 + a0x1 = 0
care arata ca functia x1(t) = C1 · eµt · cos νt este solutie a ecuatiei diferentiale(2.4).
La fel se arata ca functia x2(t) = C2 · eµt · sin νt este solutie a ecuatieidiferentiale (2.4).
Astfel, rezulta ca orice functie
x(t) = C1 · eµt · cos νt+ C2 · eµt · sin νt (2.9)
este solutie a ecuatiei (2.4).Aratam ın continuare ca pentru orice t0, x
00, x
10 ∈ IR1 putem determina
constantele C1 si C2 ın mod unic astfel ıncat sa aibe loc x(t0) = x00 si x(t0) =
x10.

48 CAPITOLUL 2
Impunand aceste conditii functiei (2.9) rezulta urmatorul sistem de ecuatiialgebrice:
x00 = eµt0 · [C1 · cos νt0 + C2 · sin νt0]x1
0 = eµt0 · [C1 · (µ cos νt0 − ν sin νt0) + C2 · (µ sin νt0 + ν cos νt0)]
avand ca necunoscute constantele C1, C2.Determinantul acestui sistem algebric este ν · e2µt0 si este diferit de zero.
In particular, rezulta de aici ca formula (2.9) reprezinta toate solutiileecuatiei (2.4) ın cazul ın care ecuatia (2.5) are radacinile complexe.
Am ajuns ın acest fel sa determinam toate solutiile ecuatiei (2.4).Aceasta ınsa nu permite ınca sa rezolvam problema 2.1.1 pusa la ınceputul
paragrafului, pentru ca aceasta conduce de fapt la ecuatia (2.3), adica:
a2x+ a1x+ a0x = f(t)
ın care functia f este data.Reamintim ca, deosebirea dintre ecuatiile (2.4) si (2.3) consta ın faptul ca
ın membrul drept al ecuatiei (2.3) este o functie continua care nu neaparateste functia identic nula, adica este o ecuatie diferentiala de ordinul al doileacu coeficienti constanti neomogena.
Pentru determinarea solutiilor ecuatiei (2.3) este important sa observamla ınceput ca, daca x(t) este o solutie fixata a ecuatiei (2.3) si x(t) este osolutie oarecare a aceleiasi ecuatii, atunci diferenta
x(t) = x(t) − x(t)
este o solutie oarecare a ecuatiei (2.4). Intrucat solutiile x(t) ale ecuatiei(2.4) sunt cunoscute, determinarea solutiilor x(t) ale ecuatiei (2.3) revine ladeterminarea unei singure solutii x(t) ale acestei ecuatii.
O solutie particulara x(t) pentru ecuatia (2.3) se determina cu metodavariatiei constantelor a lui Lagrange (un procedeu asemanator cu cel descrisın Cap 1 § 6).
In continuare prezentam aceasta metoda ın cazul ın care ecuatia alge-brica (2.5) are radacinile reale distincte λ1, λ2. In acest caz solutiile ecuatieiomogene (2.4) se scriu sub forma (2.7):
x(t) = C1eλ1t + C2e
λ2t.

Ecuatii diferentiale de ordinul al doilea cu coeficienti constanti 49
Solutia particulara x(t) a ecuatiei neomogene (2.3) se cauta sub aceeasiforma considerand ınsa C1, C2 functii de clasa C1 de variabila t:
x(t) = C1(t)eλ1t + C2(t)e
λ2t (2.10)
Pentru a impune functiei x(t) sa verifice ecuatia (2.3) calculam derivataacesteia si obtinem:
x(t) = C1(t)eλ1t + C2(t)e
λ2t + C1(t)λ1eλ1t + C2(t)λ2e
λ2t (2.11)
In continuare ar trebui sa calculam derivata de ordinul al doilea x prinderivare ın raport cu t ın expresia (2.11). Aceasta ar introduce derivatelede ordinul al doilea ale functiilor C1(t), C2(t) de existenta carora nu ne-amasigurat. De aceea impunem conditia suplimentara:
C1(t)eλ1t + C2(t)e
λ2t = 0 (2.12)
Cu aceasta (2.11) devine:
x(t) = C1(t)λ1eλ1t + C2(t)λ2e
λ2t (2.13)
iar prin derivare obtinem:
x(t) = C1(t)λ1eλ1t + C2(t)λ2e
λ2t + C1(t)λ21e
λ1t + C2(t)λ22e
λ2t. (2.14)
Inlocuind (2.13) si (2.14) ın (2.3) rezulta:
C1(t)(a2λ21 + a1λ1 + a0)e
λ1t + C2(t)(a2λ22 + a1λ2 + a0)e
λ2t+
+ C1(t)a2λ1eλ1t + C2(t)a2λ2e
λ2t = f(t)
sau
C1(t)λ1eλ1t + C2(t)λ2e
λ2t =1
a2
f(t) (2.15)
Astfel, sistemul de ecuatii algebrice format din ecuatiile (2.12) si (2.15):
C1(t)eλ1t + C2(t)e
λ2t = 0
C1(t)λ1eλ1t + C2(t)λ2e
λ2t =1
a2f(t)
(2.16)

50 CAPITOLUL 2
ın care necunoscutele sunt C1(t), C2(t) (derivatele functiilor C1(t) si C2(t)),are determinantul (λ2 − λ1)e
(λ1+λ2)t 6= 0 si permite determinarea functiilorC1(t) si C2(t):
C1(t) = − 1
a2(λ2 − λ1)· e−(λ1+λ2)t · eλ2t · f(t)
C2(t) =1
a2(λ2 − λ1)· e−(λ1+λ2)t · eλ1t · f(t)
(2.17)
Rezulta de aici ca functiile C1(t) si C2(t) sunt date de:
C1(t) = − 1
a2(λ2 − λ1)
∫ t
t∗e−λ1τ · f(τ)dτ
C2(t) =1
a2(λ2 − λ1)
∫ t
t∗e−λ2τ · f(τ)dτ
(2.18)
iar solutia particulara a ecuatiei neomogene (2.3) este:
x(t) = − 1
a2(λ2 − λ1)· eλ1t
∫ t
t∗e−λ1τ · f(τ)dτ+
+1
a2(λ2 − λ1)· eλ2t
∫ t
t∗e−λ2τ · f(τ)dτ.
(2.19)
Rezulta ca o solutie oarecare a ecuatiei (2.3) este data de
x(t) = x(t) + x(t)
adica:
x(t) = C1eλ1t + C2e
λ2t − 1
a2(λ2 − λ1)· eλ1t
∫ t
t∗e−λ1τ · f(τ)dτ +
+1
a2(λ2 − λ1)· eλ2t
∫ t
t∗e−λ2τ · f(τ)dτ (2.20)
Facand un rationament asemanator ın cazul ın care ecuatia algebrica(2.5) are radacini reale egale λ1 = λ2 = λ, pentru ecuatia (2.3) gasim solutiaparticulara:
x(t) = eλt
[− 1
a2
∫ t
t∗e−λτ · τ · f(τ)dτ +
t
a2
∫ t
t∗e−λτ · f(τ)dτ
]

Ecuatii diferentiale de ordinul al doilea cu coeficienti constanti 51
si solutia generala
x(t) = eλ1t(C1 + C2t) +
+ eλt
[− 1
a2
∫ t
t∗e−λτ · τ · f(τ)dτ +
t
a2
∫ t
t∗e−λτ · f(τ)dτ
](2.21)
In cazul ın care ecuatia algebrica (2.5) are radacinile complexe λ1 = µ+iνsi λ1 = µ− iν, cu metoda variatiei constantelor gasim solutia particulara:
x(t) = − 1
a2ν· eµt · cos νt
∫ t
t∗e−µτ · sin ντ · f(τ)dτ +
+1
a2ν· eµt · sin νt
∫ t
t∗e−µτ · cos ντ · f(τ)dτ
si solutia generala
x(t) = C1eµt · cos νt+ C2e
µt · sin νt−
− 1
a2ν· eµt · cos νt
∫ t
t∗e−µτ · sin ντ · f(τ)dτ +
+1
a2ν· eµt · sin νt
∫ t
t∗e−µt · cos ντ · f(τ)dτ (2.22)
In general pentru orice t0, x00, x
10 ∈ IR1 putem determina constantele C1 si
C2 din formula de reprezentare a solutiei x(t) a ecuatiei neomogene ((2.20),(2.21), (2.22)) astfel ıncat sa avem x(t0) = x0
0 si x(t0) = x10.
Folosind una din formulele (2.20), (2.21), (2.22), determinata de natura
radacinilor ecuatiei L · λ2 + R · λ +1
C= 0, putem determina toate solutiile
ecuatiei (∗) din problema 2.1.1. Cunoscand valoarea i0 a curentului la mo-mentul t0 si valoarea variatiei curentului i10 la momentul t0, se determina con-stantele C1 si C2 din formulele de reprezentare a solutiei astfel ıncat solutiaoarecare i(t) a ecuatiei sa verifice conditiile initiale i(t0) = i0 si i(t0) = i10.
Exercitii
1. Rezolvati urmatoarele probleme cu date initiale:
a) x− x = 0 x(0) = 2, x(0) = 0

52 CAPITOLUL 2
R: x(t) = et + e−t
b) x+ 2x+ x = 0 x(0) = 0, x(0) = 1
R: x(t) = t · e−t
c) x− 4x+ 4x = 0 x(1) = 1, x(1) = 0
R: x(t) = 3e2t−2 − 2t · e2t−2
d) x+ x = 0 x(π
2
)= 1, x
(π2
)= 0
R: x(t) = sin t
e) x+ x+ x = 0 x(0) = 0, x(0) = 1
R: x(t) =2
3
√3 · e− 1
2t · sin
(2
3
√3t
)
2. Rezolvati urmatoarele ecuatii diferentiale :
a) x+ 3x+ 2x =1
1 + et
R: x(t) = e−t · ln(1 + et) + e−2t · ln(1 + et) − e−2t · C1 + e−t · C2
b) x− 6x+ 9x =9t2 + 6t+ 2
t3
R: x(t) = e3t · C1 + t · e3t · C2 +1
t
c) x+ x =et
2+e−t
2
R: x(t) = C1 · sin t+ C2 · cos t+1
4(e2t + 1) · e−t
d) x− 3x+ 2x = 2e2t
R: x(t) = (2tet − 2et + C1et + C2)e
t
e) x− 4x+ 4x = 1 + et + e2t

Ecuatii diferentiale de ordinul al doilea cu coeficienti constanti 53
R: x(t) = C1 · e2t + C2t · e2t +1
4+
1
2t2e2t + et
f) x+ x = sin t+ cos 2t
R: x(t) = C1 sin t+ C2 cos t− 2
3cos t2 +
1
3− 1
2t cos t
g) x− 2(1 +m)x+ (m2 + 2m)x = et + e−t, m ∈ IR1
R: x(t) = C1 · emt + C2 · e(m+2)t +((m+ 3)e2t +m− 1) · e−t
m3 + 3m2 −m− 3
h) x− 5x+ 6x = 6t2 − 10t+ 2
R: x(t) = C1 · e3t + C2 · e2t + t2
i) x− 5x = −5t2 + 2t
R: x(t) =1
3t3 +
1
5e5t · C1 + C2
j) x+ x = te−t
R: x(t) = C1 sin t+ C2 cos t+1
2(−1 + t) · et
k) x− x = tet + t+ t3e−t
R: x(t) = C1e−t + C2e
t +1
16(−4te2t + 2e2t − 16tet − 2t4+
+4t2e2t − 4t3 − 6t2 − 6t− 3) · e−t
l) x− 7x+ 6x = sin t
R: x(t) = C1 · et + C2 · e6t +7
74cos t+
5
74sin t
m) x− 4x+ 4x = sin t · cos 2t
R: x(t) = C1e2t + C2te
2t − 10
169sin t · cos t2 − 191
4225sin t+
+24
169cos t3 − 788
4225cos t

54 CAPITOLUL 2
n) x+ x = cos t− cos 3t
R: x(t) = C1 sin t+ C2 cos t+1
2· t sin t+
1
2cos t3 − 1
8cos t

Ecuatii diferentiale liniare de ordinul n cu coeficienti constanti 55
2.2 Ecuatii diferentiale liniare de ordinul n
cu coeficienti constanti
O ecuatie diferentiala liniara de ordinul n cu coeficienti constanti este oecuatie diferentiala de forma
anx(n) + an−1x
(n−1) + . . .+ a1x+ a0x = f(t) (2.23)
ın care a0, a1, . . . , an−1, an sunt constante reale cunoscute, an 6= 0, f(t) functiecunoscuta continua si x este functie reala de clasa Cn necunoscuta.
Observatia 2.2.1 Daca f = 0, atunci ecuatia (2.23) se numeste ecuatiediferentiala liniara de ordinul n cu coeficienti constanti omogena, iar dacaf 6= 0 ecuatia (2.23) se numeste ecuatie diferentiala liniara de ordinul n cucoeficienti constanti neomogena.
Rezolvam mai ıntai ecuatia omogena atasata ecuatiei (2.23):
anx(n) + an−1x
(n−1) + . . .+ a1x+ a0x = 0 (2.24)
Pentru determinarea solutiilor ecuatiei (2.24) se cauta solutii de formax(t) = C · eλt. Impunand unei asemenea functii sa verifice ecuatia (2.24)rezulta ca λ trebuie sa verifice ecuatia algebrica
anλn + an−1λ
n−1 + . . .+ a1λ+ a0 = 0 (2.25)
numita ecuatie caracteristica.Daca ecuatia (2.25) are toate radacinile reale si distincte λ1, λ2, . . . λn
atunci functiile xi(t) = Ci ·eλit, i = 1, n sunt solutii ale ecuatiei (2.24) si oricefunctie x(t) data de:
x(t) = C1 · eλ1t + C2 · eλ2t + . . .+ Cn · eλnt (2.26)
este solutie a ecuatiei (2.24) (C1, C2, . . . , Cn sunt constante reale oarecare).Mai mult, oricare ar fi t0, x
00, x
10, ..., x
n−10 ∈ IR1 putem determina ın mod
unic constantele C1, C2, . . . , Cn astfel ıncat sa aiba loc
x(t0) = x00, x(t0) = x1
0, ... , x(n−1)(t0) = xn−1
0 .
In particular rezulta de aici ca formula (2.26) reprezinta toate solutiileecuatiei (2.24) ın acest caz.

56 CAPITOLUL 2
Daca printre radacinile ecuatiei caracteristice (2.25) exista si radacinicomplexe simple, de exemplu λ = µ+ iν si λ = µ− iν, atunci fiecarei perechide radacini complex conjugate ıi corespund solutiile
x1λ(t) = C1
λ · eµt · cos νt si x2λ(t) = C2
λ · eµt · sin νt
Pentru µ = 0 aceste solutii devin:
x1λ(t) = C1
λ · cos νt si x2λ(t) = C2
λ · sin νtAstfel, daca ecuatia caracteristica are 2k radacini complexe simple λj =
µj + iνj si λj = µj − iνj , j = 1, k si n−2k radacini reale simple λ2k+1, . . . , λn,atunci orice functie x(t) data de:
x(t) =
k∑
j=1
C1j · eµjt · cos νjt+
k∑
j=1
C2j · eµjt · sin νjt+
n∑
j=2k+1
Cj · eλjt (2.27)
este solutie a ecuatiei (2.24) (C1j , C
2j , j = 1, k si Cj, j = 2k + 1, n sunt con-
stante reale oarecare).Mai mult, oricare ar fi t0, x
00, x
10, ..., x
n−10 ∈ IR1 putem determina ın mod
unic constantele C1j , C
2j , j = 1, k si Cj , j = 2k + 1, n astfel ıncat sa aiba loc
x(t0) = x00, x(t0) = x1
0, ..., x(n−1)(t0) = xn−1
0 . In particular rezulta de aici caformula (2.27) reprezinta toate solutiile ecuatiei (2.24) ın acest caz.
Daca ecuatia caracteristica (2.25) are k radacini reale λ1, . . . , λk avand or-dine de multiplicitate q1, . . . , qk si l radacini complex conjugate µ1±iν1, . . . , µl±iνl avand ordine de multiplicitate r1, . . . , rl, atunci orice functie x(t) data deformula:
x(t) =
k∑
j=1
eλjt · Pqj−1(t) +
l∑
j=1
eµjt ·[Qrj−1(t) · cos νjt+Rrj−1(t) · sin νjt
]
(2.28)este solutie a ecuatiei (2.24), unde Pqj−1(t) sunt polinoame de grad qj − 1 cucoeficineti reali nedeterminati si Qrj−1, Rrj−1 sunt polinoame de grad rj − 1cu coeficienti reali nedeterminati.
Mai mult, oricare ar fi t0, x10, x
20, ..., x
n−10 ∈ IR1 putem determina ın mod
unic coeficientii polinoamelor Pqj−1, Qqj−1, Rqj−1 astfel ıncat sa aiba loc x(t0) =
x10, x(t0) = x2
0, ..., x(n−1)(t0) = xn−1
0 .In particular rezulta de aici ca formula (2.28) reprezinta toate solutiile
ecuatiei (2.24) ın acest caz.

Ecuatii diferentiale liniare de ordinul n cu coeficienti constanti 57
Reamintim ca obiectul acestui paragraf este rezolvarea ecuatiei diferentialede ordinul n, cu coeficienti constanti neomogena (2.23):
anx(n) + an−1x
(n−1) + . . .+ a1x+ a0x = f(t)
ın care a0, a1, . . . , an−1, an sunt constante reale date, an 6= 0, f functie cunos-cuta continua si x este functie reala de clasa Cn necunoscuta.
Pentru determinarea solutiilor ecuatiei (2.23) este important sa observamca daca x(t) este o solutie fixata a ecuatiei (2.23) si x(t) este o solutie oarecarea aceleiasi ecuatii, atunci diferenta x(t)−x(t) = x(t) este o solutie oarecare aecuatiei diferentiale liniare omogene cu coeficienti constanti, (2.24). Intrucatsolutiile x(t) ale ecuatiei omogene (2.24) sunt date ın general de (2.28), deter-minarea solutiilor x(t) ale ecuatiei (2.23) revine la determinarea unei singuresolutii x(t) ale acestei ecuatii.
O solutie particulara x(t) pentru ecuatia (2.23) se determina cu metodavariatiei constantelor a lui Lagrange, un procedeu asemenator cu cel descrisın paragraful precedent.
Vom ilustra acest procedeu pe un exemplu (n = 3):
Exemplul 2.2.1 Sa se determine solutiile ecuatiei:
...x + 4x+ 5x = 4et
Consideram ecuatia omogena
...x + 4x+ 5x = 0
Ecuatia caracteristica asociata este:
λ3 + 4λ2 + 5λ = 0
ale carei radacini sunt:
λ0 = 0, λ1 = −2 − i, λ2 = −2 + i.
Solutiile ecuatiei omogene sunt date de:
y(t) = C1 + C2 · e−2t · cos t+ C3 · e−2t · sin t.Cautam x(t), o solutie particulara pentru ecuatia neomogena, sub forma
x(t) = C1(t) + C2(t) · e−2t · cos t+ C3(t) · e−2t · sin t

58 CAPITOLUL 2
ın care C1(t), C2(t), C3(t) sunt functii de clasa C1 care trebuiesc determinate.Calculam derivata ıntai a functiei x(t) si obtinem:
x = C1 + C2 · e−2t · cos t+ C3 · e−2t · sin t− 2C2 · e−2t · cos t−
− 2C3 · e−2t · sin t− C2 · e−2t · sin t+ C3 · e−2t · cos t
Impunem ca C1, C2, C3 sa verifice:
C1 + C2 · e−2t · cos t+ C3 · e−2t · sin t = 0
si obtinem:
x = −C2 · e−2t · (2 cos t+ sin t) + C3 · e−2t · (cos t− 2 sin t)
Calculam derivata a doua a functiei x(t) si obtinem:
x = −C2 · e−2t · (2 cos t+ sin t) + C3 · e−2t · (cos t− 2 sin t)+
+2C2 · e−2t · (2 cos t+ sin t) − 2C3 · e−2t · (cos t− 2 sin t)−
−C2 · e−2t · (−2 sin t+ cos t) + C3 · e−2t · (− sin t− 2 cos t) =
= −C2 · e−2t · (2 cos t+ sin t) + C3 · e−2t · (cos t− 2 sin t)+
+C2 · e−2t · (3 cos t+ 4 sin t) + C3 · e−2t · (3 sin t− 4 cos t).
Impunem ca C2, C3 sa verifice:
−C2 · e−2t · (2 cos t+ sin t) + C3 · e−2t · (cos t− 2 sin t) = 0
si obtinem
x = C2 · e−2t · (3 cos t+ 4 sin t) + C3 · e−2t · (3 sin t− 4 cos t)
De aici calculam derivata a treia a functiei x(t) si obtinem:...x = C2 · e−2t · (3 cos t+ 4 sin t) + C3 · e−2t · (3 sin t− 4 cos t)−
−2C2 · e−2t · (3 cos t+ 4 sin t) − 2C3 · e−2t · (3 sin t− 4 cos t)+
+C2 · e−2t · (−3 sin t+ 4 cos t) + C3 · e−2t · (3 cos t+ 4 sin t) =
= C2 · e−2t · (3 cos t+ 4 sin t) + C3 · e−2t · (3 sin t− 4 cos t)+
+C2 · e−2t · (−2 cos t− 11 sin t) + C3 · e−2t · (−2 sin t+ 11 cos t).

Ecuatii diferentiale liniare de ordinul n cu coeficienti constanti 59
Inlocuind toate acestea ın ecuatia data rezulta:
C2 · e−2t · (3 cos t+ 4 sin t) +C3 · e−2t · (3 sin t− 4 cos t) ++C2 · e−2t · (−2 cos t− 11 sin t) +C3 · e−2t · (−2 sin t+ 11 cos t) ++C2 · e−2t · (12 cos t+ 16 sin t) +C3 · e−2t · (12 sin t− 16 cos t) −−C2 · e−2t · (10 cos t+ 5 sin t) +C3 · e−2t · (5 cos t− 10 sin t) = 4et
sau
C2 · e−2t · (3 cos t+ 4 sin t) + C3 · e−2t · (3 sin t− 4 cos t) = 4et
Aceasta egalitate ımpreuna cu sistemul de conditii impus pe parcursfunctiilor C1, C2, C3 conduce la urmatorul sistem liniar de ecuatii algebriceın necunoscutele C1, C2, C3:
C1 +C2 · e−2t · cos t +C3 · e−2t · sin t = 0
−C2 · e−2t · (2 cos t+ sin t) +C3 · e−2t · (cos t− 2 sin t) = 0
C2 · e−2t · (3 cos t+ 4 sin t) +C3 · e−2t · (−4 cos t+ 3 sin t) = 4et
Din ultimele doua ecuatii rezula sistemul algebric:
C2 · (−2 cos t− sin t) +C3 · (cos t− 2 sin t) = 0
C2 · (3 cos t+ 4 sin t) +C3 · (−4 cos t+ 3 sin t) = 4e−t
Determinantul sistemului este:
∆ = (−2 cos t− sin t)(−4 cos t+ 3 sin t)
− (cos t− 2 sin t)(3 cos t+ 4 sin t) =
= 8 cos2 t− 6 sin t cos t+ 4 sin t cos t− 3 sin2 t− 3 cos2 t−− 4 sin t cos t+ 6 sin t cos t+ 8 sin2 t = 8 − 3 = 5
si solutiile sunt date de:
C2 = −4
5· et(cos t− 2 sin t) C3 =
4
5· et(−2 cos t− sin t).

60 CAPITOLUL 2
Inlocuind C2, C3 ın prima ecuatie, se obtine C1:
C1 =4
5· e−t cos t(cos t− 2 sin t) +
4
5· e−t sin t(2 cos t+ sin t) =
=4
5· e−t[cos2 t+ sin2 t] =
=4
5· e−t
Astfel au fost gasite derivatele functiilor necunoscute C1, C2, C3:
C1 =4
5· e−t
C2 = −4
5· et[cos t− 2 sin t]
C3 = −4
5· et[2 cos t+ sin t]
de unde rezulta:
C1 = −4
5· e−t
C2 =1
10· et[−12 cos t+ 4 sin t]
C3 =1
10· et[4 cos t+ 12 sin t]
Obtinem de aici:
x(t) = −4
5· e−t +
1
10· e−t[−12 cos t+ 4 sin t] · cos t+
+1
10· e−t[4 cos t+ 12 sin t] · sin t
de unde avem ca solutia generala a ecuatiei neomogene
x(t) = x(t) + x(t)
este:
x(t) = C1 + c2e−2t cos t+ C3e
−2t sin t− 4
5· e−t +
+1
10· e−t[−12 cos t+ 4 sin t] · cos t+
+1
10· e−t[4 cos t+ 12 sin t] · sin t

Ecuatii diferentiale liniare de ordinul n cu coeficienti constanti 61
Exercitii
1. Rezolvati urmatoarele ecuatii diferentiale (cu calculatorul):
a)...x − 2x− x+ 2x = 0
R: x(t) = C1 · et + C2 · e2t + C3 · e−t
b) x(4) − 5x+ 4x = 0
R: x(t) = C1 · et + C2 · e2t + C3 · e−t + C4 · e−2t
c)...x − 6x+ 12x− 8x = 0
R: x(t) = C1 · e2t + C2 · t · e2t + C3 · t2 · e2t
d) x(7) + 3x(6) + 3x(5) + x(4) = 0
R: x(t) = C1 ·e−t+C2 ·t ·e−t +C3 ·t2 ·e−t +C4+C5 ·t+C6 ·t2+C7 ·t3
e)...x − x+ x− x = 0
R: x(t) = C1 · et + C2 sin t+ C3 cos t
f) x(4) + 2x+ x = 0
R: x(t) = C1 sin t+ C2 cos t+ C3t · sin t+ C4t · cos t
g) x(4) − 3...x + 5x− 3x+ 4x = 0
R: x(t) = C1 sin t+ C2 cos t+ C3e3
2t · sin
(√7
2t
)+
+C4e3
2t · cos
(√7
2t
)
2. Determinati solutiile urmatoarelor probleme cu date initiale:
a)...x − 2x− x+ 2x = 0 x(0) = 0, x(0) = 1 x(0) = 2

62 CAPITOLUL 2
R: x(t) = −1
2et +
2
3e2t − 1
6e−t
b)...x − x+ x− x = 0 x(1) = 0, x(1) = 1 x(1) = 2
R: x(t) = et−1 − (sin 1) · sin t− (cos 1) · cos t
c) x(4) − 5x+ 4x = 0 x(0) = 0, x(0) = 1 x(0) = 2,...x (0) = 3
R: x(t) = −1
6· et +
1
6· e−2t − 1
2· e−t +
1
2· e2t
3. Rezolvati urmatoarele ecuatii diferentiale:
a)...x − 2x− x+ 2x = t+ 1
R: x(t) =3
4+
1
2· t+ C1e
t + C2e2t + C3e
−t
b)...x − 6x+ 12x− 8x = sin t
R: x(t) = − 11
125cos t− 2
125sin t+C1e
2t+C2t2 ·e2t+C3t
3 ·e2t

Reducerea ecuatiei diferentiale liniare de ordinul n a lui Euler la o ecuatie liniara 63
2.3 Reducerea ecuatiei diferentiale liniare de
ordinul n a lui Euler la o ecuatie diferentiala
liniara de ordinul n cu coeficienti constanti
Definitia 2.3.1 Ecuatia diferentiala liniara de ordinul n de forma:
an · tn · x(n) + an−1 · tn−1 · x(n−1) + . . .+ a1 · t · x+ a0 · x = 0 (2.29)
ın care a0, a1, . . . , an sunt constante reale, se numeste ecuatie diferentialaliniara de ordinul n a lui Euler.
Propozitia 2.3.1 Prin schimbarea de variabila |t| = eτ ecuatia diferentiala(2.29) se reduce la o ecuatie diferentiala liniara de ordinul n cu coeficienticonstanti.
Demonstratie: Fie x = x(t) o solutie a ecuatiei (2.29) si y functia y(τ) =x(eτ ). De aici, pentru t > 0, avem ca x(t) = y(ln t) iar prin derivare succesivaobtinem:
dx
dt=
dy
dτ· 1
t
d2x
dt2=
d2y
dτ 2· 1
t2− dy
dτ· 1
t2=
1
t2·(d2y
dτ 2− dy
dτ
)
d3x
dt3= − 2
t3·(d2y
dτ 2− dy
dτ
)+
1
t3·(d3y
dτ 3− d2y
dτ 2
)=
=1
t3·(d3y
dτ 3− 3
d2y
dτ 2+ 2
dy
dτ
)
Daca presupunem ca pentru 1 ≤ k < n avem
dkx
dtk=
1
tk·
k∑
i=1
cki ·diy
dτ i
atunci printr-o noua derivare deducem egalitatea
dk+1x
dtk+1=
1
tk+1·
k+1∑
i=1
ck+1i · d
iy
dτ i

64 CAPITOLUL 2
Rezulta ın acest fel ca derivatele de orice ordin (1 ≤ k ≤ n) ale functiei
x se exprima ca un produs ıntre1
tk+1si o combinatie liniara a derivatelor de
ordin i ≤ k + 1 ale functiei y.Inlocuind ın (2.29) se obtine ca functia y verifica o ecuatie diferentiala
liniara de ordinul n cu coeficienti constanti.Se determina solutiile y = y(τ) ale acestei ecuatii si apoi solutiile x(t) ale
lui (2.29) pentru t > 0:x(t) = y(ln t).
Pentru t < 0 se rationeaza la fel si se obtine:
x(t) = y(ln |t|).
Exercitii:
Rezolvati urmatoarele ecuatii diferentiale:
1. t2x+ tx− x = 0
R: x(t) = C1 · t+ C2 ·1
t
2. 12t3...x − 25t2x+ 28tx− 6x = 0
R: x(t) = C1 · t2 + C2 · t1
12 + C3 · t3
3. t2x+ tx = 0
R: x(t) = C1 + C2 · ln t
4. t2x− tx+ x = 0
R: x(t) = C1 · t+ C2 · t · ln t

Calculul simbolic al solutiilor ecuatiilor de ordinul n 65
2.4 Calculul simbolic al solutiilor ecuatiilor
diferentiale de ordinul n
Pentru rezolvarea numerica a ecuatiilor diferentiale de ordin superior(n ≥ 2) Maple foloseste aceeasi functie dsolve (solve ordinary differentialequations - ODEs) care a fost prezentata ın capitolul anterior.Noutatea care apare aici consta ın scrierea sintaxei pentru derivatele de ordinsuperior. De exemplu, derivata de ordinul al doilea a functiei x(t) poate fiscrisa ıntr-unul din urmatoarele moduri:
diff(x(t),t,t)
diff(x(t),t$2)
(D@@2)(x)(t)
Pentru exemplificare, vom rezolva cateva ecuatii si probleme cu dateinitiale:
1. Ecuatia diferentiala liniara de ordinul al doilea cu coeficienti constantiomogena:
x− 4x+ 4x = 0; (2.30)
> eq1:=diff(x(t),t,t)-4*diff(x(t),t)+4*x(t)=0;
eq1 := d2
dt2x (t) − 4 d
dtx (t) + 4 x (t) = 0
> dsolve(eq1,x(t));
x (t) = C1 e2 t + C2 e2 tt
> dsolve(eq1,x(1)=1,D(x)(1)=0,x(t));x (t) = 3 e2 t
e2 − 2 e2 tte2
> sol1:=3*exp(2*t)/exp(2)-2*exp(2*t)*t/exp(2):
> plot(sol1,t=-infinity..infinity);

66 CAPITOLUL 2
Figura 8
Se observa ca, daca nu s-a dat nici o conditie initiala solutia generalaeste afisata cu ajutorul a doua constante. Mai precis, numarul con-stantelor este acelasi cu ordinul ecuatiei, ın cazul ecuatiei de ordinul aldoilea solutia generala exprimandu-se cu ajutorul a doua constante.
Pentru ca Maple sa afiseze solutia unei Probleme Cauchy ın cazul uneiecuatii de ordin superior trebuie sa-i dam n conditii initiale:
x(t0) = x00, x(t0) = x1
0, ... , x(n−1)(t0) = xn−1
0 .
2. Ecuatia diferentiala liniara de ordinul al patrulea cu coeficienti constantiomogena:
x(4) − 5x+ 4x = 0; (2.31)
> eq2:=diff(x(t),t,t,t,t)-5*diff(x(t),t,t)+4*x(t)=0;
eq2 := d4
dt4x (t) − 5 d2
dt2x (t) + 4 x (t) = 0
> eq2:=diff(x(t),t$4)-5*diff(x(t),t$2)+4*x(t)=0;
eq2 := d4
dt4x (t) − 5 d2
dt2x (t) + 4 x (t) = 0
> eq2:=(D@@4)(x)(t)-5*(D@@2)(x)(t)+4*x(t)=0;
eq2 :=(D(4)
)(x) (t) − 5
(D(2)
)(x) (t) + 4 x (t) = 0
> dsolve(eq2,x(t));
x (t) = C1 e−2 t + C2 e−t + C3 e2 t + C4 et
> dsolve(eq2,x(0)=0,D(x)(0)=1,(D@@2)(x)(0)=2,(D@@3)(x)(0)=3,x(t));
x (t) = −1/2 e−t + 1/6 e−2 t + 1/2 e2 t − 1/6 et

Calculul simbolic al solutiilor ecuatiilor de ordinul n 67
> sol2:=-1/2*exp(-t)+1/6*exp(-2*t)+1/2*exp(2*t)-
1/6*exp(t):
> plot(sol2,t=-2..2);
Figura 9
Din instructiunile de mai sus reiese ca, ın rezolvarea Problemei Cauchypentru o ecuatie diferentiala de ordinul patru s-au folosit patru conditiiinitiale. Se observa deasemenea, sintaxa corespunzatoare derivatelor deordin superior a fost scrisa ın cele trei moduri prezentate la ınceputulparagrafului.
3. Ecuatia diferentiala liniara de ordinul al treilea cu coeficienti constantineomogena:
...x − 6x+ 12x− 8x = sin t; (2.32)
> eq3:=diff(x(t),t,t,t)-6*diff(x(t),t,t)+12*diff(x(t),t)
-8*x(t)=sin(t);
eq3 := d3
dt3x (t) − 6 d2
dt2x (t) + 12 d
dtx (t) − 8 x (t) = sin (t)
> dsolve(eq3);
x (t) = − 11125
cos (t) − 2125
sin (t) + C1 e2 t + C2 e2 tt+ C3 e2 tt2
> dsolve(eq3,x(0)=0,D(x)(0)=2,(D@@2)(x)(0)=4);x (t) = − 11
125cos (t) − 2
125sin (t) + 11
125e2 t + 46
25e2 tt− 19
10e2 tt2
> sol3:=-11/125*cos(t)-2/125*sin(t)+11/125*exp(2*t)+
46/25*exp(2*t)*t-19/10*exp(2*t)*t^2:
> plot(sol3,t=-4..1);

68 CAPITOLUL 2
Figura 10
In cele ce urmeaza, vom mai prezenta o alta functie de plotare DEtools[DEplot] (plot solutions to an equation or a system of DEs) pentru avizualiza solutia acestei probleme cu date initiale. Utilizarea acesteia nunecesita rezolvarea ecuatiei ın avans deoarece ecuatia este inclusa directın instructiune. Sintaxa acestei functii poate avea una din urmatoareleforme:
with(DEtools):DEplot(deqns, vars, trange, options);
with(DEtools):DEplot(deqns, vars, trange, inits, options);
with(DEtools):DEplot(deqns, vars, trange, xrange, yrange, options);
with(DEtools):DEplot(deqns, vars, trange, inits, xrange, yrange, op-tions);
ın care:
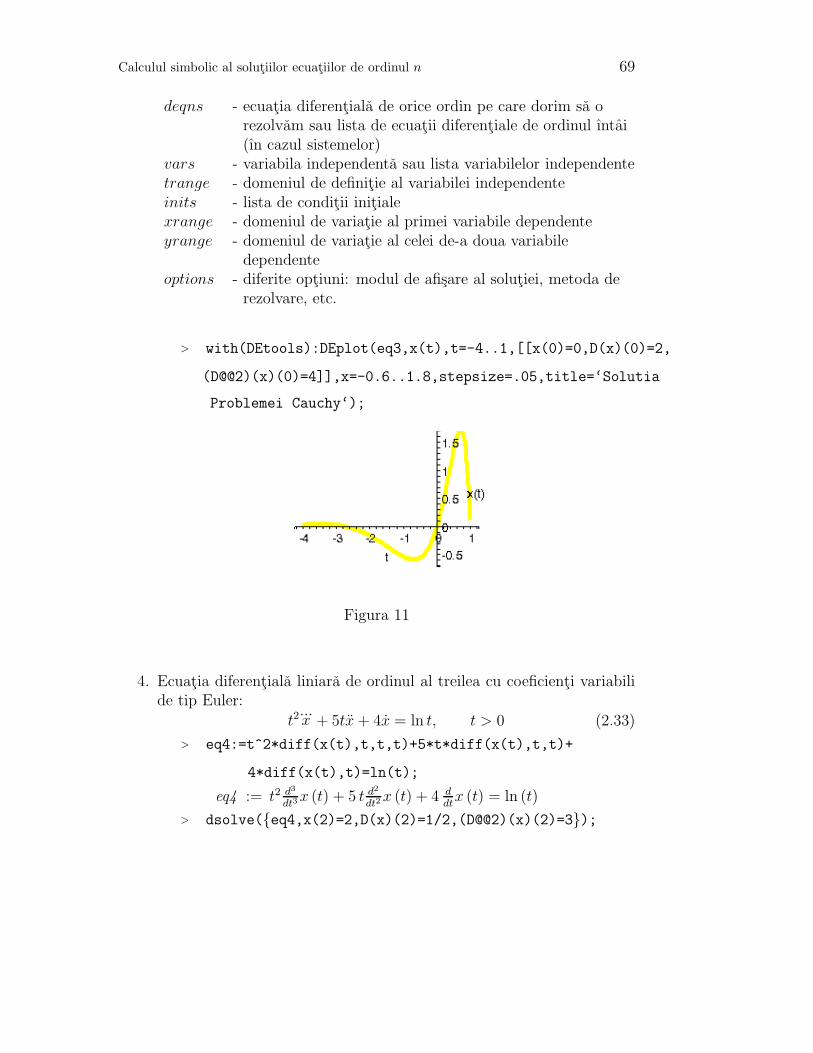
Calculul simbolic al solutiilor ecuatiilor de ordinul n 69
deqns - ecuatia diferentiala de orice ordin pe care dorim sa orezolvam sau lista de ecuatii diferentiale de ordinul ıntai(ın cazul sistemelor)
vars - variabila independenta sau lista variabilelor independentetrange - domeniul de definitie al variabilei independenteinits - lista de conditii initialexrange - domeniul de variatie al primei variabile dependenteyrange - domeniul de variatie al celei de-a doua variabile
dependenteoptions - diferite optiuni: modul de afisare al solutiei, metoda de
rezolvare, etc.
> with(DEtools):DEplot(eq3,x(t),t=-4..1,[[x(0)=0,D(x)(0)=2,
(D@@2)(x)(0)=4]],x=-0.6..1.8,stepsize=.05,title=‘Solutia
Problemei Cauchy‘);
Figura 11
4. Ecuatia diferentiala liniara de ordinul al treilea cu coeficienti variabilide tip Euler:
t2...x + 5tx+ 4x = ln t, t > 0 (2.33)
> eq4:=t^2*diff(x(t),t,t,t)+5*t*diff(x(t),t,t)+
4*diff(x(t),t)=ln(t);
eq4 := t2 d3
dt3x (t) + 5 t d2
dt2x (t) + 4 d
dtx (t) = ln (t)
> dsolve(eq4,x(2)=2,D(x)(2)=1/2,(D@@2)(x)(2)=3);
70 CAPITOLUL 2
x (t) = −2 ln(2 ) + 19 + (−29+2 ln(2 ))·ln(t)t
+32 ln(2 )−2 (ln(2 ))2−32
t+ 1/4t(ln(t)) − 2
> sol4:=-2*ln(2)+19+(-29+2*ln(2))*ln(t)/t+(32*ln(2)-
2*ln(2)^2-32)/t+1/4*t*(ln(t)-2):
> plot(sol4,t=0.1..infinity,axes=boxed);
Figura 12
Capitolul 3
Sisteme de ecuatii diferentialede ordinul ıntai liniare cucoeficienti constanti
3.1 Sisteme de ecuatii diferentiale de ordinul
ıntai liniare cu coeficienti constanti omo-
gene
Definitia 3.1.1 Un sistem de ecuatii diferentiale de ordinul ıntai liniarecu coeficienti constanti omogen este un sistem de n relatii de dependentafunctionala de forma:
x1 = a11 · x1 + a12 · x2 + . . .+ a1n · xn
x2 = a21 · x1 + a22 · x2 + . . .+ a2n · xn (3.1)...
xn = an1 · x1 + an2 · x2 + . . .+ ann · xn
dintre un sistem de n functii necunoscute x1, x2, . . . , xn si derivatele acestorax1, x2, . . . , xn. In sistemul (3.1) coeficientii aij sunt constante consideratecunoscute.
Definitia 3.1.2 Un sistem ordonat de n functii reale x1, x2, . . . , xn de clasa
71

72 CAPITOLUL 3
C1 este solutie a sistemului (3.1) daca verifica
dxi
dt=
n∑
j=1
aij · xi(t)
pentru orice t ∈ IR1.
Definitia 3.1.3 Fiind date t0 ∈ IR′ si (x01, x
02, . . . , x
0n) ∈ IRn problema de-
terminarii solutiei (x1(t), x2(t), . . . , xn(t)) a sistemului (3.1) care verificaxi(t0) = x0
i i = 1, n se numeste problema cu date initiale sau problemaCauchy.
Pentru reprezentarea matriceala a sistemului (3.1) notam cu A matriceapatratica care are ca elemente constantele aij : A = (aij)i,j=1,n si cu X ma-tricea coloana X = (x1, x2, . . . xn)T . Cu aceste matrice sistemul (3.1) se scriesub forma matriceala:
X = A ·X. (3.2)
In aceasta problema derivarea functiei matricealeX = X(t) ınseamna derivareaelementelor matricei, iar produsul A ·X ınsemna produsul dintre matricea Asi matricea X.Problema Cauchy (problema cu date initiale) se scrie matriceal sub forma:
X = A ·X, X(t0) = X0 (3.3)
si consta ın determinarea functiei matriceale X = X(t) care verifica ecuatia(3.2) si conditia initiala X(t0) = X0.
Teorema 3.1.1 (de existenta a solutiei problemei Cauchy)Pentru orice t0 ∈ IR1 si X0 = (x0
1, x02, . . . x
0n)T problema Cauchy (3.3) are o
solutie definita pe IR1.
Demonstratie: Consideram sirul de functii matriceale definite astfel:

Sisteme de ecuatii diferentiale de ordinul ıntai liniare omogene 73
X0(t) = X0 = I ·X0
X1(t) = X0 +
∫ t
t0
A ·X0(τ)dτ = [I +(t− t0) · A
1!] ·X0
X2(t) = X0 +
∫ t
t0
A ·X1(τ)dτ = [I +(t− t0) · A
1!+
(t− t0)2 · A2
2!] ·X0
X3(t) = X0 +
∫ t
t0
A ·X2(τ)dτ =
= [I +(t− t0) · A
1!+
(t− t0)2 · A2
2!+
(t− t0)3 · A3
3!] ·X0
. . .
Xm(t) = X0+
∫ t
t0
A·Xm−1(τ)dτ =
= [I +(t− t0) · A
1!+
(t− t0)2 · A2
2!+ . . .+
(t− t0)m · Am
m!] ·X0
. . .
Functiile din acest sir verifica inegalitatea
‖Xm+p(t)−Xm(t)‖ ≤m+p∑
k=m+1
|t− t0|k · ‖A‖k
k!·‖X0‖, (∀) m, p ∈ IN, (∀) t ∈ IR1
si prin urmare sirul de functii Xm(t)m∈n este uniform fundamental pe oricecompact K ⊂ IR1. Rezulta ca sirul este uniform convergent pe orice compactK ⊂ IR1 si se poate trece la limita ın egalitatea
Xm(t) = X0 +
∫ t
t0
A ·Xm−1(τ)dτ.
pentru m→ ∞.Trecand la limita obtinem ca limita X(t) a sirului Xm(t)
X(t) = limm→∞
Xm(t)
verifica egalitatea
X(t) = X0 +
∫ t
t0
A ·X(τ)dτ

74 CAPITOLUL 3
sau
X(t) = X0 + A ·∫ t
t0
X(τ)dτ.
De aici rezulta ca functia X(t) este de clasa C1 si derivata ei verifica X(t) =A ·X(t), adica X(t) este solutia sistemului de ecuatii diferentiale sub formamatriceala (3.2). Punand t = t0 ın egalitatea
X(t) = X0 + A ·∫ t
t0
X(τ)dτ
obtinem egalitatea X(t0) = X0 care arata ca X(t) este solutia problemeiCauchy (3.3). Am aratat ın acest fel ca problema Cauchy (3.3) are o solutie.
Observatia 3.1.1 In aceasta demonstratie norma matricei patratice A ‖A‖este data de ‖A‖ = sup
‖X‖≤1
‖ A ·X ‖.
Observatia 3.1.2 Sirul de matrice patratice care intervine ın aceastademonstratie:
Um(t; t0) = I +(t− t0) · A
1!+
(t− t0)2 ·A2
2!+ . . .+
(t− t0)m · Am
m!
este de asemenea fundamental.Intr-adevar:
‖ Um+p(t; t0) − Um(t; t0) ‖≤m+p∑
k=m+1
| t− t0 |k · ‖ A ‖k
k!, (∀)m, p ∈ IN, t ∈ IR1
si prin urmare sirul de functii matriceale Um(t; t0)m∈IN este uniform con-vergent pe orice compact K ⊂ IR1. Limita acestui sir este suma seriei dematrice
∞∑
m=0
(t− t0)m ·Am
m!
care se noteaza cu e(t−t0)·A:
e(t−t0)·A =
∞∑
m=0
(t− t0)m · Am
m!

Sisteme de ecuatii diferentiale de ordinul ıntai liniare omogene 75
Observatia 3.1.3 Functia matriceala e(t−t0)·A se numeste matricea rezolvantaa sistemului (3.2). O solutie a problemei Cauchy (3.3) se obtine ınmultindmatricea e(t−t0)·A cu matricea X0:
X(t; t0, X0) = e(t−t0)·A ·X0.
Aceasta solutie este definita pe IR1.
Teorema 3.1.2 (de unicitate a solutiei problemei Cauchy)Problema Cauchy (3.3) are o singura solutie.
Demonstratie: Presupunem prin absurd ca problema Cauchy (3.3), pelanga solutiaX(t; t0, X
0) determinata ın teorema precedenta mai are o solutie
X(t). Pe intervalul I de definitie a acestei solutii(I ∋ t0) scriem egalitatile :
X(t; t0, X0) = X0 + A ·
∫ t
t0
X(τ ; t0, X0)dτ, (∀)t ∈ I
si
X(t) = X0 + A ·∫ t
t0
X(τ)dτ, (∀)t ∈ I
si deducem succesiv:
X(t; t0, X0) − X(t) = A ·
∫ t
t0
[X(τ ; t0, X0) − X(τ)]dτ
‖X(t; t0, X0) − X(t)‖ ≤ ‖A‖ ·
∣∣∣∣∫ t
t0
‖X(τ ; t0, X0) − X(τ)‖dτ
∣∣∣∣ <
< ε+ ‖A‖ ·∣∣∣∣∫ t
t0
‖X(τ ; t0, X0) − X(τ)‖dτ
∣∣∣∣(∀)ε > 0 (∀)t ∈ I.
Pentru t > t0 rezulta ın continuare:
‖X(t; t0, X0) − X(t)‖
ε+
∫ t
t0
‖A‖ · ‖X(τ ; t0, X0) − X(τ)‖dτ
≤ 1 ⇔

76 CAPITOLUL 3
‖A‖ · ‖X(t; t0, X0) − X(t)‖
ε+
∫ t
t0
‖A‖ · ‖X(τ ; t0, X0) − X(τ)‖dτ
≤ ‖A‖ ⇔
d
dt
(ε+
∫ t
t0
‖A‖ · ‖X(τ ; t0, X0) − X(τ) ‖ dτ
)
ε+
∫ t
t0
‖A‖ · ‖X(τ ; t0, X0) − X(τ)‖dτ
≤ ‖A‖ ⇔
ln
(ε+
∫ t
t0
‖A‖ · ‖X(τ ; t0, X0) − X(τ) ‖ dτ
)− ln(ε) ≤‖ A ‖ (t− t0) ⇔
ln
ε+
∫ t
t0
‖A‖ · ‖X(τ ; t0, X0) − X(τ) ‖ dτ
ε) ≤‖ A ‖ ·(t− t0) ⇔
ε+
∫ t
t0
‖A‖ · ‖X(τ ; t0, X0) − X(τ) ‖ dτ ≤ ε · e‖A‖·(t−t0), (∀)t ≥ t0, ε > 0.
=⇒ ‖X(t; t0, X0) − X(t)‖ < εe‖A‖(t−t0), (∀)t ≥ t0, (∀)ε > 0
Pentru t fixat si ε→ 0 rezulta
‖X(t; t0, X0) − X(t)‖ = 0.
Astfel am aratat ca pentru orice t ≥ t0 si t ∈ I avem X(t) = X(t; t0, X0).
Rationam analog pentru t ≤ t0, t ∈ I si obtinem X(t) = X(t; t0, X0). Se
obtine ın final egalitatea
X(t) = X(t; t0, X0)
pentru orice t ∈ I, care arata ca solutia X(t) coincide cu solutia X(t; t0, X0)
gasita ın teorema de existenta.
Observatia 3.1.4 Din teorema de existenta si cea de unicitate rezulta caorice solutie a sistemului (3.2) este definita pe IR1 si se obtine cu formulaX(t) = e(t−t0)·A ·X0.Intr-adevar fie X(t) o solutie oarecare a sistemului (3.2) definita pe un interval

Sisteme de ecuatii diferentiale de ordinul ıntai liniare omogene 77
I. Consideram t0 ∈ I si X(t0) = X0. Solutia considerata X(t), conformteoremei de unicitate, coincide cu functia X(t; t0, X
0) = e(t−t0)·A ·X0 solutiea problemei Cauchy (3.3):
X(t) ≡ X(t; t0, X0) ≡ e(t−t0)·A ·X0.
Teorema 3.1.3 Multimea S a solutiilor sistemului diferential liniar cu coeficienticonstanti de ordinul ıntai este un spatiu vectorial n-dimensional.
Demonstratie: Fie X1(t) si X2(t) doua solutii ale sistemului(3.2) si α, βdoua constante reale. Tinand seama de egalitatea:
α ·X1(t) + β ·X2(t) = e(t−t0)·A · [α ·X1(t0) + β ·X2(t0)]
rezulta ca functia α ·X1(t)+β ·X2(t) este solutie a sistemului (3.2). Obtinemın acest fel ca multimea S a solutiilor sistemului (3.2) este spatiu vectorial.Pentru a demonstra ca dimensiunea spatiului vectorial S este n, considerambaza canonica b1, b2, . . . , bn ın IRn:
b1 = (1, 0, 0, . . . , 0)T , b2 = (0, 1, 0, . . . , 0)T , . . . , bn = (0, 0, 0, . . . , 1)T
si sistemul de solutiiX i(t) = et·A · bi, i = 1, n.
Vom arata ca sistemul de solutiiX1(t), X2(t), . . . , Xn(t) este o baza ın spatiulsolutiilor S. Pentru aceasta, fie la ınceput c1, c2, . . . , cn, n constante realeastfel ca
n∑
k=1
ck · et·A · bk = 0
(∀)t ∈ IR1. In particular pentru t = 0 avem
n∑
k=1
ck · bk = 0
de unde rezulta c1 = c2 = . . . = cn = 0. Rezulta astfel ca sistemul de functiiX i(t) = et·A · bi, i = 1, n este liniar independent.Consideram acum o solutie oarecare X(t) a sistemului (3.2), si vectorul X(0).Pentru acest vector X(0) ∈ IRn exista n constante reale c1, c2, . . . , cn astfelca
X(0) =
n∑
k=1
ck · bk.

78 CAPITOLUL 3
Construim functia
X(t) =
n∑
k=1
ck ·Xk(t)
si remarcam ca aceasta este o solutie a sistemului (3.2) si verifica:
X(0) =
n∑
k=1
ck ·Xk(0) =
n∑
k=1
ck · bk = X(0).
In baza teoremei de unicitate rezulta ca:
X(t) = X(t), (∀)t.
Am obtinut astfel ca, o solutie oarecare X(t) este combinatia liniara
X(t) =n∑
k=1
ck ·Xk(t)
a solutiilor Xk(t).
Definitia 3.1.4 Un sistem de n solutii Xk(t)k=1,n ale ecuatiei (3.2) se
numeste sistem fundamental daca sistemul de functii Xk(t)k=1,n este liniarindependent.
Teorema 3.1.4 Un sistem de n solutii Xk(t)k=1,n ale ecuatiei (3.2) estesistem fundamental daca si numai daca functia reala definita prin:
W (X1(t), . . . , Xn(t)) = det(xij(t)),
numita wronskianul sistemului, nu se anuleaza. Am notat:
X i(t) = (xi1(t), x
i2(t), . . . , x
in(t))T .
Demonstratie: Aratam la ınceput necesitatea conditiei. Rationam prin re-ducere la absurd si admitem ca, desi sistemul de solutiiX1(t), X2(t), . . . , Xn(t) este fundamental exista un punct t0 ∈ IR1 ın carewronskianul sistemului de solutii se anuleaza: det(xi
j(t0)) = 0. In acesteconditii, sistemul algebric liniar si omogen de n ecuatii cu n necunoscutec1, c2, . . . , cn
n∑
i=1
ci · xij(t0) = 0 j = 1, n

Sisteme de ecuatii diferentiale de ordinul ıntai liniare omogene 79
are o solutie nebanala ci = c0i , i = 1, n. Cu o asemenea solutie nebanalaci = c0i , i = 1, n (c0i nu sunt toate nule) construim functia:
X(t) =n∑
i=1
c0i ·X i(t) t ∈ IR1.
Functia X(t) construita astfel este solutie a sistemului (3.2) si se anuleaza ınt0:
X(t0) =
n∑
i=1
c0i ·X i(t0) = 0.
In virtutea teoremei de unicitate rezulta ca functia X(t) este identic nula:
n∑
i=1
c0i ·X i(t) = 0, (∀)t ∈ IR1.
Aceasta ınsa este absurd, deoarece sistemul de n solutii X i(t)i=1,n este in-dependent.Trecem acum sa aratam suficienta conditiei. Presupunem ca wronskianulW (X1(t), . . . , Xn(t)) = det(xi
j(t)) nu se anuleaza si aratam ca sistemul desolutii X i(t)i=1,n este fundamental.
Rationam prin reducere la absurd si presupunem ca sistemul de solutii X i(t)i=1,nnu este fundamental (nu este liniar independent). In aceasta ipoteza existaun sistem de constante c0i , i = 1, n, nu toate nule astfel ca
n∑
i=1
c0i ·X i(t) = 0
pentru orice t ∈ IR1. Egalitatea aceasta implica egalitatilen∑
i=1
c0i · xij(t) = 0 (∀)t ∈ IR1 j = 1, n
ceea ce arata ca det(xij(t)) = 0 (∀)t ∈ IR1; absurd.
Teorema 3.1.5 (Liouville). Un sistem de n solutii X i(t)i=1,n ale sistemu-
lui (3.2) este fundamental daca si numai daca exista un punct t0 ∈ IR1 ıncare wronskianul sistemului de solutii
W (X1(t), . . . , Xn(t)) = det(xij(t))
este nenul.

80 CAPITOLUL 3
Demonstratie: Avand ın vedere teorema precedenta este suficient sa aratamca daca exista t0 ∈ IR1 astfel ca
W (X1(t0), . . . , Xn(t0)) 6= 0
atunci pentru orice t ∈ IR1, W (X1(t), . . . , Xn(t)) 6= 0. Calculam derivatawronskianului sistemului de solutii X i(t)i=1,n si obtinem
d
dtW (X1(t), . . . , Xn(t)) =
(n∑
i=1
aii
)·W (X1(t), . . . , Xn(t)
De aici rezulta egalitatea:
W (X1(t), . . . , Xn(t)) = W (X1(t0), . . . , Xn(t0)) · exp
[(n∑
i=1
aii
)·(t−t0)
]
care arata ca pentru orice t ∈ IR1 avem W (X1(t), . . . , Xn(t)) 6= 0.
Observatia 3.1.5 In demonstratia teoremei care afirma ca solutiile sis-temului (3.2) formeaza un spatiu vectorial n dimensional am vazut ca daca
b1 = (1, 0, 0, . . . , 0)T , b2 = (0, 1, 0, . . . , 0)T , . . . , bn = (0, 0, 0, . . . , 1)T
atunci sistemul de functii
X1(t) = et·A · b1, X2(t) = et·A · b2, . . . , Xn(t) = et·A · bn
este un sistem fundamental de solutii. Daca tinem seama de faptul ca solutiaX i(t) este coloana i a matricei patratice et·A atunci deducem ca putem con-strui solutiile ecuatiei (3.2) daca cunoastem elementele matricei et·A.
Pentru determinarea elementelor matricei et·A tinem seama de urmatoarelerezultate de algebra liniara:
Propozitia 3.1.1 Daca matricea A este similara cu matricea A0 adica
A = S ·A0 · S−1
atunci matricea et·A este similara cu matricea et·A0 adica
et·A = S · et·A0 · S−1.

Sisteme de ecuatii diferentiale de ordinul ıntai liniare omogene 81
Aceasta ıntrucat pentru orice k ∈ IN avem Ak = S ·Ak0 · S−1.
Propozitia 3.1.2 (teorema lui Jordan)Pentru orice matrice A exista o matrice ”diagonala”
A0 = diag(A01, A02, . . . A0m)
si o matrice nesingulara S cu urmatoarele proprietati:
i) A0j este matrice patrata de ordin qj , j = 1, m si
m∑
j=1
qj = n;
ii) A0j este matrice de forma A0j = λj · Ij + Nj, j = 1, m, unde λj estevaloare proprie pentru matricea A, Ij este matricea unitate de ordinqj, Nj este matricea nilpotenta : Nj =
(bjkl
), k, l = 1, qj cu bjk,k+1 = 1
si bjkl = 0, pentru l 6= k + 1, si qj este cel mult egal cu ordinul demultiplicitate al valorii proprii λj;
iii) A = S · A0 · S−1.
Propozitia 3.1.3 Matricea et·A0 are forma:
et·A0 = diag(et·A01 , et·A02 , . . . , et·A0m
)
si matricea et·A0 are forma:
et·A0j = eλj ·t ·
1 t1!
t2
2!· · · tqj−1
(qj−1)!
0 1 t1!
· · · tqj−2
(qj−2)!
. . . . . . . . . . . . . . .0 0 0 · · · 1
Teorema 3.1.6 Elementele matricei et·A = S · et·A0 · S−1 sunt functii deforma:
uij(t)=
p∑
k=1
eλktP ijqk−1(t)+
l∑
k=1
eµkt[Qij
rk−1(t) cos νkt+Rijrk−1(t) sin νkt
],
i, j=1, n
unde λ1, . . . , λp sunt valorile proprii reale ale lui A cu ordinele de multiplic-itate respectiv q1, . . . , qp, µk + iνk, k = 1, l sunt valorile proprii complexe alelui A cu ordin de multiplicitate rk, iar Pqk−1, Qrk−1 si Rrk−1 sunt polinoamede grad qk − 1 si rk − 1 respectiv, cu coeficienti reali.

82 CAPITOLUL 3
Rezultatul este imediat ın baza propozitiilor (3.1.1, 3.1.2, 3.1.3).
Teorema 3.1.7 Solutiile sistemului (3.2) sunt functii de forma:
eλktPqk−1(t) +l∑
k=1
eµkt [Qrk−1(t) cos νkt+Rrk−1(t) sin νkt] , i, j = 1, n
unde λ1, . . . , λp sunt valorile proprii reale ale lui A cu ordin de multiplicitaterespectiv q1, . . . , qp; µk + iνk, k = 1, l sunt valorile proprii complexe ale lui Acu ordin de multiplicitate rk; Pqk−1, Qrk−1 si Rrk−1 sunt vectori coloana aicaror elemente sunt polinoame de grad qk − 1 respectiv rk − 1.
Exercitii
1. Rezolvati urmatoarele sisteme:
a)
x1 =−x1+8x2
x2 = x1+ x2R:
x1(t) = c1 · e3t + c2 · e−3t
x2(t) = 12· c1 · e3t −1
4· c2 · e−3t
b)
x1 =−3x1+ 2x2
x2 =−2x1+ x2R:
x1(t) = c1 · e−t + c2 · t · e−t
x2(t) = c1 · e−t +2t+12
· c2 · e−t
c)
x1 =2x1− x2
x2 = x1+ 2x2R:
x1(t) = c1 · cos t · e2t + c2 · sin t · e2t
x2(t) = c1 · sin t · e2t − c2 · cos t · e2t
d)
x1 = 3x1+12x2− 4x3
x2 =−x1− 3x2+ x3
x3 =−x1− 12x2+6x3
R:
x1(t) = c1 · e2t + c2 · et + c3 · e3t
x2(t) = −38c1 · e2t −1
2c2 · et −1
3c3 · e3t
x3(t) = −78c1 · e2t − c2 · et − c3 · e3t
e)
x1 = x1+x2− 2x3
x2 =4x1+ x2
x3 =2x1+x2− x3
R:
x1(t) = −12c1 · e−t + +1
4c3 · et
x2(t) = c1 · e−t + c2 · et + c3 · t · et
x3(t) = +12c2 · et +1
2c3 · t · et
f)
x1 = 2x1− x2− x3
x2 = 3x1− 2x2− 3x3
x3 =−x1+ x2+ 2x3
R:
x1(t) = c2 + c3 · et
x2(t) = c1 · et +3 c2x3(t) = − c1 · et − c2 + c3 · et

Sisteme de ecuatii diferentiale de ordinul ıntai liniare omogene 83
g)
x1 =−x1 −x2
x2 = −x2 −x3
x3 = −x3
R:
x1(t) = c1 · e−t − c2 · t · e−t +12c3 · t2 · e−t
x2(t) = + c2 · e−t − c3 · t · e−t
x3(t) = c3 · e−t
2. Rezolvati urmatoarele probleme Cauchy (cu date initiale):
a)
x1 = x2
x2 = x1
x1(0) = 1x2(0) = 0
R:
x1(t) = 1
2e−t +1
2et
x2(t) = −12e−t +1
2et
b)
x1 = 11x1+16x2
x2 =−2x1− x2
x1(1) = 0x2(1) = 1
R:
x1(t) = 4e3t−3 + 4e7t−7
x2(t) = 2e3t−3 − e7t−7
c)
x1 = x1− x2
x2 =−4x1− 2x2
x1(1) = 1x2(1) = 1
R:
x1(t) = 3
5e2t−2 +2
5e−3t+3
x2(t) = −35e2t−2 +8
5e−3t+3
3. Se considera sistemul de ecuatii diferentiale
x1 = a · x1+ b · x2
x2 = c · x1+ d · x2
cu a · d− b · c 6= 0. Aratati ca:
i) daca (a− d)2 + 4 · b · c ≥ 0 si a+ d < 0 si a · d− b · c > 0, atunci oricesolutie nenula a sistemului tinde la (0, 0).
ii) daca (a− d)2 + 4 · b · c ≥ 0 si a+ d > 0 si a · d− b · c > 0, atunci oricesolutie nenula a sistemului tinde ın norma la +∞.
iii) daca (a − d)2 + 4 · b · c < 0 si a + d < 0, atunci toate solutiile nenuleale sistemului tind la (0, 0).
iv) daca (a − d)2 + 4 · b · c < 0 si a + d > 0, atunci toate solutiile nenuleale sistemului tind ın norma la +∞.
v) daca (a − d)2 + 4 · b · c < 0 si a + d = 0, atunci toate solutiile nenuleale sistemului sunt periodice.

84 CAPITOLUL 3
3.2 Sisteme de ecuatii diferentiale de ordinul
ıntai liniare cu coeficienti constanti neo-
mogene
Definitia 3.2.1 Un sistem de ecuatii diferentiale de ordinul ıntai liniarecu coeficienti constanti neomogen este un sistem de n relatii de dependentafunctionala de forma:
x1 = a11 · x1 + a12 · x2 + . . .+ a1n · xn +f1(t)
x2 = a21 · x1 + a22 · x2 + . . .+ a2n · xn +f2(t) (3.4)...
xn = an1 · x1 + an2 · x2 + . . .+ ann · xn +fn(t)
dintre un sistem de n functii necunoscute x1, x2, . . . , xn si derivatele acestorax1, x2, . . . , xn.In sistemul (3.4) coeficientii aij sunt constante cunoscute, iar functiile realefi : IR1 → IR sunt continue si cunoscute.
Definitia 3.2.2 Un sistem ordonat de n functii reale x1, x2, . . . , xn de clasaC1 este solutie a sistemului (3.4) daca verifica:
dxi
dt=
n∑
j=1
aij · xj + fi(t) (∀)t ∈ IR
Definitia 3.2.3 Fiind data t0 ∈ IR1 si (x01, x
02, . . . , x
0n) ∈ IRn, problema
determinarii solutiei (x1(t), x2(t), . . . , xn(t)) a sistemului (3.4) care verificaxi(t0) = x0
i i = 1, n, se numeste problema cu date initiale sau problemaCauchy.
Pentru reprezentarea matriceala a sistemului (3.4) notam cu A matriceapatrata n× n care are ca elemente constantele aij : A = (aij)i,j=1,n, cu F (t)matricea coloana F (t) = (f1(t), f2(t), . . . , fn(t)) si cu X(t) matricea coloanaX = (x1, x2, . . . , xn)T . Cu aceste matrice sistemul (3.4) se scrie sub formamatriceala:
X = A ·X + F (t) (3.5)
iar problema Cauchy se scrie sub forma
X = A ·X + F (t), X(t0) = X0 (3.6)

Sisteme de ecuatii diferentiale de ordinul ıntai liniare neomogene 85
Teorema 3.2.1 (de existenta si unicitate si de reprezentare a solutiei prob-lemei cu date initiale).Daca functia F (t) este continua pe IR1, atunci pentru orice t0 ∈ IR1 siX0 ∈ IRn problema cu date initiale (3.6) are solutie unica definita pe IR1
si aceasta solutie se reprezinta sub forma:
X(t; t0, X0) = e(t−t0)·A ·X0 +
∫ t
t0
e(t−s)·A · F (s)ds (3.7)
Demonstratie: Pentru a demonstra ca problema Cauchy (3.6) are cel multo solutie, presupunem prin absurd ca X1(t) si X2(t) sunt doua solutii aleproblemei (3.6) si consideram functia X3(t) = X1(t) −X2(t).Se verifica usor ca functia X3(t) este solutia problemei Cauchy
X3 = A ·X3, X3(t0) = 0.
Din teorema de unicitate a solutiei problemei Cauchy pentru sisteme omogenerezulta ca:
X3(t) = 0, (∀)t.
Prin urmare
X1(t) −X2(t) ≡ 0,
ceea ce contrazice ipoteza X1(t) 6= X2(t).Ramane sa aratam ca functia Z(t) definita prin:
Z(t) = e(t−t0)·A ·X0 +
∫ t
t0
e(t−s)·A · F (s)ds
pentru orice t ∈ IR1 verifica (3.6).Remarcam ca functia Z(t) este corect definita; este de clasa C1 pe IR1 siderivata ei verifica:
Z(t) = A · e(t−t0)·A ·X0 + F (t) +
∫ t
t0
A · e(t−s)·A · F (s)ds = A · Z + F (t).
Prin urmare functia Z(t) este solutie a ecuatiei neomogene (3.5). In plus cal-culand Z(t0) gasim Z(t0) = X0 si astfel teorema a fost complet demonstrata.

86 CAPITOLUL 3
Problema 3.2.1 O substanta A se descompune ın alte doua substante Bsi C. Viteza de formare a fiecareia din ele este proportionala cu cantitateade substanta nedescompusa. Sa se determine variatia cantitatilor x si y, cese formeaza ın functie de timp.Se dau cantitatea initiala de substanta a si cantitatile de substante B si C
formate dupa trecerea unei ore:a
8si
3a
8.
Rezolvare: La momentul t cantitatea de substanta A este a − x − y.Deci vitezele de formare ale substantelor B si C vor fi:
x = k1 · (a− x− y)y = k2 · (a− x− y)
sau x = −k1 · x− k1 · y + k1 · ax = −k2 · x− k2 · y + k2 · a
Matricea A ın acest caz este A =
[−k1 −k1
−k2 −k2
].
Valorile proprii ale matricei A sunt radacinile ecuatiei
(k1 + λ) · (k2 + λ) − k1 · k2 = 0.
Aceste radacini sunt λ1 = −(k1 + k2) si λ2 = 0, iar matricea et·A este:
et·A =1
k1 + k2
[−k1 · e−(k1+k2)·t + k2 e−(k1+k2)·t − 1
k1 · k2 · e−(k1+k2)·t − k1 · k2 k1 + k2 · e−(k1+k2)·t
]
De aici ın virtutea formulei (3.7) rezulta:
(x(t)y(t)
)= e(t−1)·A ·
(a/83/8
)+
∫ t
1
e(t−s)·A(k1 · ak2 · a
)ds
Exercitii
1. Rezolvati urmatoarele sisteme de ecuatii neomogene:
a)
x1 = x2
x2 = x1 +et + e−t
Sisteme de ecuatii diferentiale de ordinul ıntai liniare neomogene 87
R:
x1(t) = c1 · e−t + c2 · et + (12t− 1
4)et − (1
2t+ 1
4)e−t
x2(t) = − c1 · e−t + c2 · et + (12t+ 1
4)et + (1
2t− 1
4)e−t
b)
x1 = 11x1+16x2+ tx2 =−2x1− x2+1 − t
R:
x1(t) = c1 · e3t + c2 · e7t + 2349
− 57t
x2(t) = −12c1 · e3t −1
4c2 · e7t − 18
49+ 3
7t
c)
x1 = x1− x2+ 3t2
x2 =−4x1− 2x2+ 2 + 8t
R:
x1(t) = c1 · e2t + c2 · e−3t − t2
x2(t) = − c1 · e2t + 4c2 · e−3t + 2t+ 2t2

88 CAPITOLUL 3
3.3 Reducerea ecuatiilor diferentiale de or-
dinul n liniare cu coeficienti constanti la
un sistem de n ecuatii diferentiale de or-
dinul ıntai liniare cu coeficienti constanti
Consideram ecuatia diferentiala de ordinul n liniara omogena cu coeficienticonstanti:
an · x(n) + an−1 · x(n−1) + . . .+ a1 · x+ a0 · x = 0 (3.8)
ın care coeficientul an este presupus diferit de zero.Ecuatia diferentiala (3.8) are aceleasi solutii ca si ecuatia diferentiala:
x(n) + bn−1 · x(n−1) + . . .+ b1 · x+ b0 · x = 0 (3.9)
ın care bi =ai
an. Ecuatia (3.9) la randul ei, este ”echivalenta” cu sistemul de
ecuatii diferentiale de ordinul ıntai liniare cu coeficienti constanti:
Y = A · Y (3.10)
ın care matricea coloana Y este Y = (x, u1, u2, . . . , un−1), iar matricea patrataA este:
A =
0 1 0 0 0 . . . 00 0 1 0 0 . . . 00 0 0 1 0 . . . 0. . . . . . . . . . . . . . . . . . . . .0 0 0 0 0 . . . 1
−a0
an−a1
an. . . . . . . . . . . . −an−1
an
Valorile proprii ale acestei matrice sunt radacinile ecuatiei algebrice
an · λn + an−1 · λn−1 + . . .+ a1 · λ+ a0 = 0. (3.11)
Rezulta ın acest fel ca solutiile ecuatiei diferentiale de ordinul n liniare (3.8)sunt functii de forma:
x(t) =
p∑
j=1
eλjtPqj−1(t) +l∑
j=1
eµjt[Qrj−1(t) cos νjt+Rrj−1(t) sin νjt
]

Reducerea ecuatiilor diferentiale liniare de ordinul n la un sistem 89
ın care λj , j = 1, k sunt radacinile reale ale ecuatiei (3.11) cu ordin de mul-tiplicitate respectiv q1, . . . , qp; µj + iνk, k = 1, l sunt radacinile complexe aleecuatiei (3.11) cu ordin de multiplicitate rj, iar Pqj−1, Qrj−1 si Rrj−1 suntpolinoame de grad qj − 1 respectiv rj − 1.
Daca ecuatia diferentiala de ordinul n liniara cu coeficienti constanti esteneomogena:
an · x(n) + an−1 · x(n−1) + . . .+ a1 · x+ a0 · x = f(t) (3.12)
si an 6= 0, iar f(t) este o functie continua pe IR1, atunci orice solutie x = x(t)a acestei ecuatii este de forma:
x(t)=
p∑
j=1
eλjtPqj−1(t)+
l∑
j=1
eµjt[Qrj−1(t) cos νjt+Rrj−1(t) sin νjt
]+x(t)
unde x(t) este o solutie fixata a ecuatiei (3.12).Daca ecuatia (3.12) nu are radacini pur imaginare si f este periodica de
perioada T , atunci ecuatia (3.12) are o singura solutie periodica de perioadaT .
Problema 3.3.1 Aratati ca ecuatia diferentiala:
L · d2i
dt2+R · di
dt+
1
C· i = −E0 · ω sinωt
care guverneaza evolutia intensitatii curentului ıntr-un circuitR,L, C (R,L, Cconstante pozitive) cuplat la o sursa de curent alternativ are o singura solutie
periodica pe perioada2π
ωsi toate celelalte solutii tind la aceasta solutie.
Rezolvare: Se considera o solutie particulara de forma
i(t) = A · cosωt+B · sinωt
care se ınlocuieste ın ecuatie si se determina constantele A si B. Aceasta estesolutia periodica cautata.Dupa aceasta, se scrie formula unei solutii oarecare i(t) si se face diferentai(t) − i(t) care este o solutie a ecuatiei omogene (f(t) = 0). Deoarece R > 0se obtine ca i(t) − i(t) → 0 pentru t→ ∞ adica, i(t) → i(t).

90 CAPITOLUL 3
Exercitii
Rezolvati urmatoarele ecuatii diferentiale de ordin superior liniare cu coefi-cienti constanti prin metoda reducerii la un sistem de ecuatii diferentiale deordinul ıntai liniare cu coeficienti constanti:
1.
a) x− x = 0 x(0) = 2 x(0) = 0 R: x(t) = et + e−t
b) x+ 2x+ x = 0 x(0) = 0 x(0) = 1 R: x(t) = t · e−t
c) x− 4x+ 4x = 0 x(1) = 1 x(1) = 0 R: x(t) = 3e2t−2 − 2te2t−2
d) x+ x = 0 x(π
2
)= 1 x
(π2
)= 0 R: x(t) = sin t
e) x+ x+ x = 0 x(0) = 0 x(1) = 1 R: x(t) = 2√
33e−
1
2t sin(√
32
)
2.
a)...x − 2x− x+ 2x = 0 x(0) = 0 x(0) = 1 x(0) = 2
R: x(t) = 12· et + 2
3· e2t − 1
6· e−t
b)...x − x+ x− x = 0 x(1) = 0 x(1) = 1 x(1) = 2
R: x(t) = et−1 + (sin 1) · sin t− (cos 1) · cos t
c) x(4) − 5x+ 4x = 0 x(0) = 0 x(0) = 1 x(0) = 2...x (0) = 3
R: x(t) = −16· et + 1
6· e−2t − 1
2· e−t + 1
2· e2t

Calculul simbolic al solutiilor sistemelor de ecuatii liniare 91
3.4 Calculul simbolic al solutiilor sistemelor
de ecuatii diferentiale de ordinul ıntai
liniare cu coeficienti constanti
Pentru rezolvarea numerica a sistemelor de ecuatii diferentiale de ordinıntai Maple foloseste functia dsolve (solve ordinary differential equations -ODEs) care a fost prezenta ın capitolele precedente.
In scrierea sintaxei ecuatia diferentiala va fi ınlocuita cu lista de ecuatiidiferentiale de ordinul ıntai care formeaza sistemul de ecuatii, respectiv conditiainitiala va fi ınlocuita cu lista conditiilor initiale xi(t0) = x0
i corespunzatoarefiecarei functii necunoscute xi(t), i = 1, n:
dsolve(ODE1, ODE2, ..., ODEn);
dsolve(ODE1, ODE2, ..., ODEn, x1(t), x2(t), ..., xn(t), extra.args);
dsolve(ODE1, ODE2, ..., ODEn, x1(t0)=x01, x2(t0)=x
02, ..., xn(t0)=x
0n,
x1(t), x2(t), ..., xn(t), extra.args);
Pentru exemplificare, vom rezolva urmatoarele siteme de ecuatii diferentialede ordinul ıntai liniare cu coeficienti constanti:
1. Sistemul de doua ecuatii diferentiale liniare cu coeficienti constantiomogen:
x1 =−x1+8x2
x2 = x1+ x2(3.13)
Pentru acest sistem vom considera conditiile initiale x1(0) = 0, x2(0) =1 si solutia problemei cu date initiale va fi reprezentata grafic utilizandtrei instructiuni de plotare:
> sys1_Eq1:=diff(x1(t),t)=-x1(t)+8*x2(t);
sys1 Eq1 := ddt
x1 (t) = −x1 (t) + 8 x2 (t)
> sys1_Eq2:=diff(x2(t),t)=x1(t)+x2(t);
sys1 Eq2 := ddt
x2 (t) = x1 (t) + x2 (t)
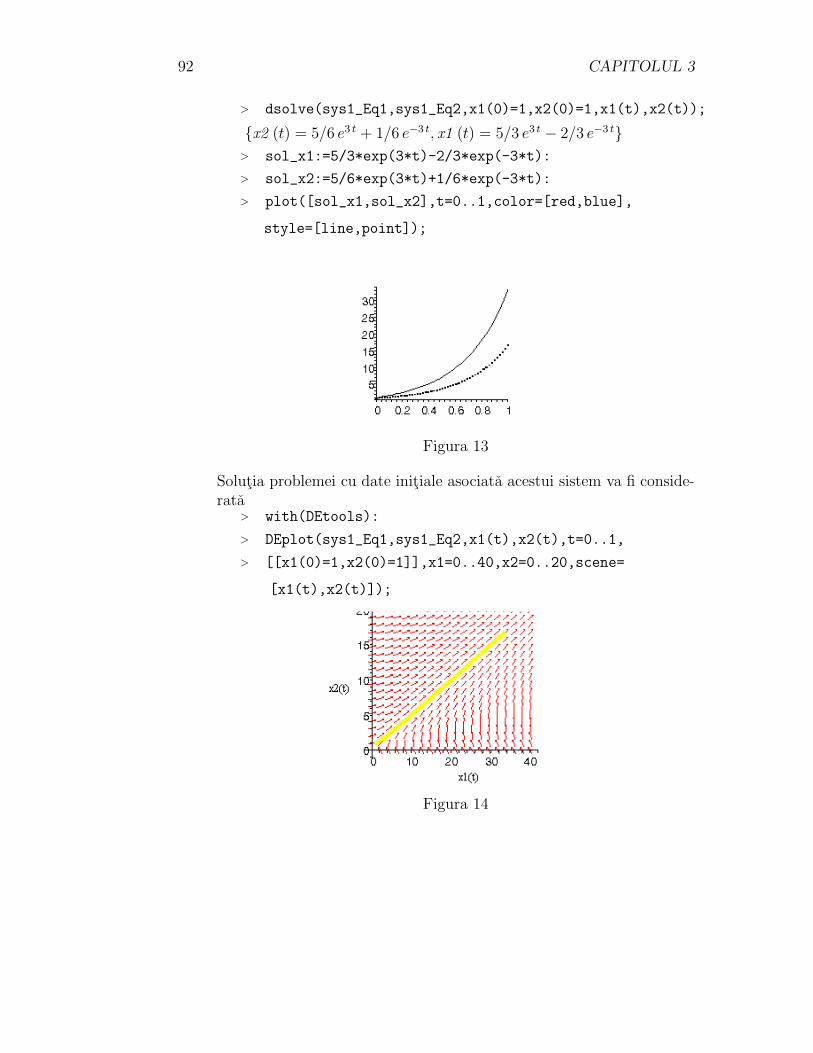
92 CAPITOLUL 3
> dsolve(sys1_Eq1,sys1_Eq2,x1(0)=1,x2(0)=1,x1(t),x2(t));
x2 (t) = 5/6 e3 t + 1/6 e−3 t, x1 (t) = 5/3 e3 t − 2/3 e−3 t> sol_x1:=5/3*exp(3*t)-2/3*exp(-3*t):
> sol_x2:=5/6*exp(3*t)+1/6*exp(-3*t):
> plot([sol_x1,sol_x2],t=0..1,color=[red,blue],
style=[line,point]);
Figura 13
Solutia problemei cu date initiale asociata acestui sistem va fi conside-rata
> with(DEtools):
> DEplot(sys1_Eq1,sys1_Eq2,x1(t),x2(t),t=0..1,
> [[x1(0)=1,x2(0)=1]],x1=0..40,x2=0..20,scene=
[x1(t),x2(t)]);
Figura 14
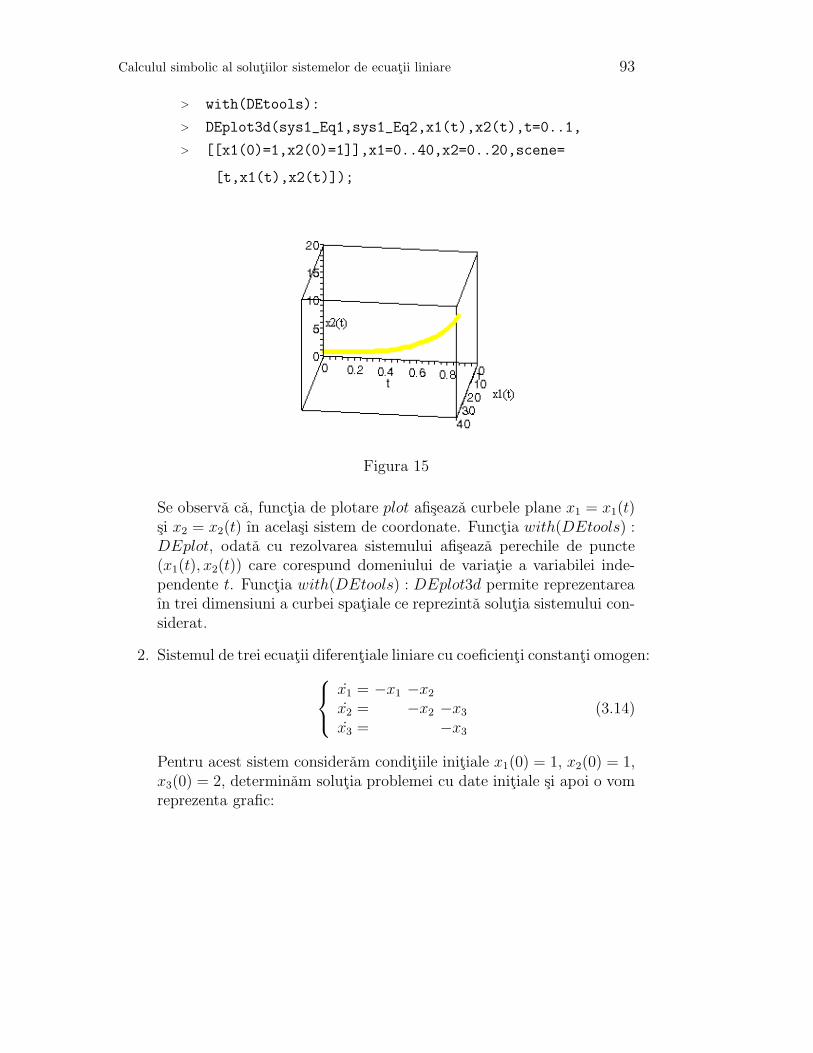
Calculul simbolic al solutiilor sistemelor de ecuatii liniare 93
> with(DEtools):
> DEplot3d(sys1_Eq1,sys1_Eq2,x1(t),x2(t),t=0..1,
> [[x1(0)=1,x2(0)=1]],x1=0..40,x2=0..20,scene=
[t,x1(t),x2(t)]);
Figura 15
Se observa ca, functia de plotare plot afiseaza curbele plane x1 = x1(t)si x2 = x2(t) ın acelasi sistem de coordonate. Functia with(DEtools) :DEplot, odata cu rezolvarea sistemului afiseaza perechile de puncte(x1(t), x2(t)) care corespund domeniului de variatie a variabilei inde-pendente t. Functia with(DEtools) : DEplot3d permite reprezentareaın trei dimensiuni a curbei spatiale ce reprezinta solutia sistemului con-siderat.
2. Sistemul de trei ecuatii diferentiale liniare cu coeficienti constanti omogen:
x1 = −x1 −x2
x2 = −x2 −x3
x3 = −x3
(3.14)
Pentru acest sistem consideram conditiile initiale x1(0) = 1, x2(0) = 1,x3(0) = 2, determinam solutia problemei cu date initiale si apoi o vomreprezenta grafic:
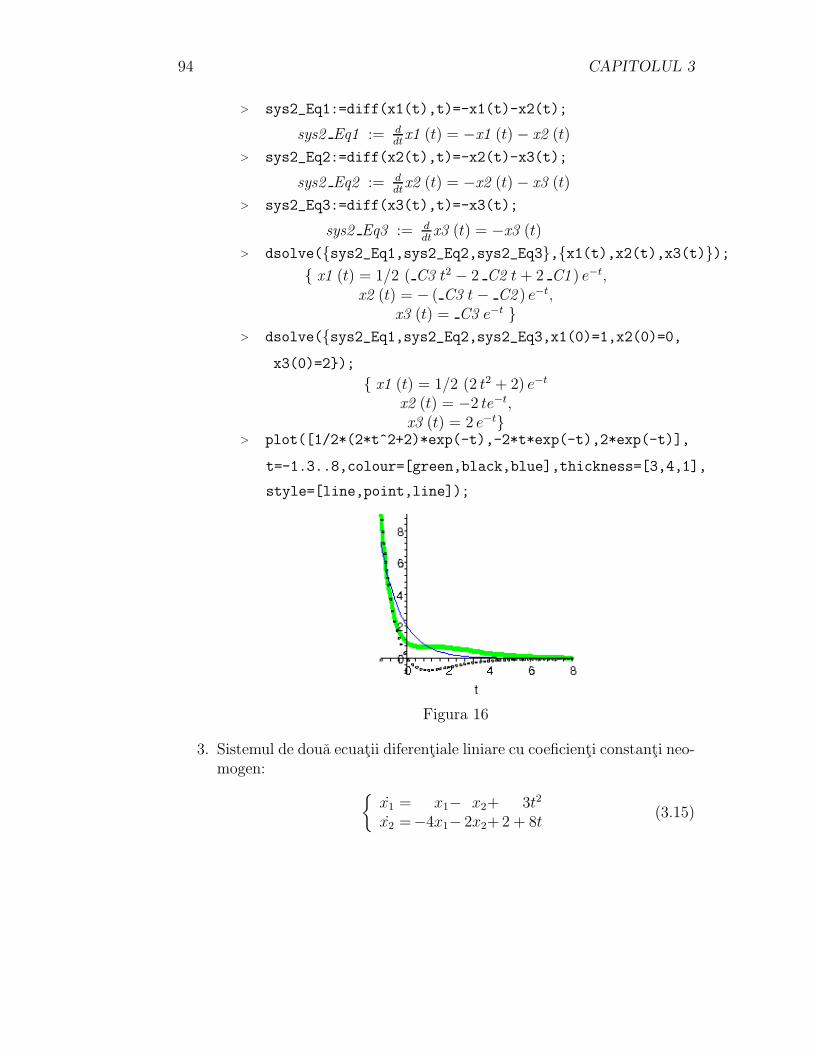
94 CAPITOLUL 3
> sys2_Eq1:=diff(x1(t),t)=-x1(t)-x2(t);
sys2 Eq1 := ddt
x1 (t) = −x1 (t) − x2 (t)
> sys2_Eq2:=diff(x2(t),t)=-x2(t)-x3(t);
sys2 Eq2 := ddt
x2 (t) = −x2 (t) − x3 (t)
> sys2_Eq3:=diff(x3(t),t)=-x3(t);
sys2 Eq3 := ddt
x3 (t) = −x3 (t)
> dsolve(sys2_Eq1,sys2_Eq2,sys2_Eq3,x1(t),x2(t),x3(t)); x1 (t) = 1/2 ( C3 t2 − 2 C2 t+ 2 C1 ) e−t,
x2 (t) = − ( C3 t− C2 ) e−t,x3 (t) = C3 e−t
> dsolve(sys2_Eq1,sys2_Eq2,sys2_Eq3,x1(0)=1,x2(0)=0,x3(0)=2);
x1 (t) = 1/2 (2 t2 + 2) e−t
x2 (t) = −2 te−t,x3 (t) = 2 e−t
> plot([1/2*(2*t^2+2)*exp(-t),-2*t*exp(-t),2*exp(-t)],
t=-1.3..8,colour=[green,black,blue],thickness=[3,4,1],
style=[line,point,line]);
Figura 16
3. Sistemul de doua ecuatii diferentiale liniare cu coeficienti constanti neo-mogen:
x1 = x1− x2+ 3t2
x2 =−4x1− 2x2+ 2 + 8t(3.15)

Calculul simbolic al solutiilor sistemelor de ecuatii liniare 95
Pentru acest sistem consideram conditiile initiale x1(1) = 1,x2(1) = 0, determinam solutia problemei cu date initiale reprezentamgrafic acaesta solutie:
> sys3_Eq1:=diff(x1(t),t)=x1(t)-x2(t)+3*t^2;
sys3 Eq1 := ddt
x1 (t) = x1 (t) − x2 (t) + 3 t2
> sys3_Eq2:=diff(x2(t),t)=-4*x1(t)-2*x2(t)+2+8*t;
sys3 Eq2 := ddt
x2 (t) = −4 x1 (t) − 2 x2 (t) + 2 + 8 t
> dsolve(sys3_Eq1,sys3_Eq2); x1 (t) = e−3 t C2 + e2 t C1 − t2
x2 (t) = 4 e−3 t C2 − e2 t C1 + 2 t+ 2 t2, > dsolve(sys3_Eq1,sys3_Eq2,x1(1)=1,x2(1)=0);
x1 (t) = 125e−2e2 t − 2/5 e3e−3 t − t2,
x2 (t) = −125e−2e2 t − 8/5 e3e−3 t + 2 t+ 2 t2
> x1:=12/5*exp(-2)*exp(2*t)-2/5*exp(3)*exp(-3*t)-t^2:
> x2:=-12/5*exp(-2)*exp(2*t)-8/5*exp(3)*exp(-3*t)+2*t+
2*t^2:
> plot([x1,x2],t=-0.1..2,color=[red,green],style=
[line,point]);
Figura 17
Capitolul 4
Teoreme de existenta siunicitate. Metode numerice.Proprietati calitative alesolutiilor. Integrale prime
4.1 Teoreme de existenta si unicitate
pentru ecuatii diferentiale de ordinul
ıntai neliniare
Fie problema cu date initiale
x = f(t, x); x(t0) = x0 (4.1)
cu f : Ω ⊂ IR2 −→ IR1 si (t0, x0) ∈ Ω.Vom enunta si demonstra o teorema referitoare la existenta unei solutii
(locale) a problemei cu date initiale (4.1). Consideram ın acest scop douanumere a > 0 si b > 0, astfel ca dreptunghiul
∆ = (t, x)| |t− t0| ≤ a si |x− x0| ≤ a
sa fie inclus ın Ω ; ∆ ⊂ Ω.
Teorema 4.1.1 (Cauchy- Lipschitz de existenta a unei solutii locale) Dacafunctia f este continua pe dreptunghiul ∆ si este lipschitziana ın raport cu
96

Teoreme de existenta si unicitate pentru ecuatii diferentiale de ordinul ıntai 97
variabila x pe ∆, atunci problema cu date initiale (4.1) are o solutie locala
definita pe intervalul Ih = [t0 − h, t0 + h], unde h = min
a,
b
M,
1
K + 1
,
M = max(t,x)∈
|f(t, x)| si K este constanta lui Lipschitz pe ∆:
|f(t, x) − f(t, y)| ≤ K|x− y|, ∀(t, x), (t, y) ∈ .
Demonstratie: Consideram functia constanta x0(t) ≡ x0 si pornind de laea, construim sirul de functii xn(t)n∈IN definit astfel:
x1(t) = x0 +
∫ t
t0
f(τ, x0(τ))dτ ;
x2(t) = x0 +
∫ t
t0
f(τ, x1(τ))dτ ;
x3(t) = x0 +
∫ t
t0
f(τ, x2(τ))dτ ;
.........
xn(t) = x0 +
∫ t
t0
f(τ, xn−1(τ))dτ ;
.........
(∀)t ∈ Ih.Aratam la ınceput ca functiile din acest sir sunt bine definite. Aceasta
revine la a arata ca pentru orice n ≥ 1 si t ∈ Ih avem (t, xn(t)) ∈ Ω.Folosim metoda inductiei matematice, vom arata ca pentru orice t ∈ Ihavem (t, xn(t)) ∈ ∆.
Etapa I (a verificarii):Pentru n = 1 avem:
x1(t) = x0 +
∫ t
t0
f(τ, x0(τ))dτ ;
si deci |x1(t) − x0| ≤ M |t− t0| ≤Mh ≤ b, (∀)t ∈ Ih.Rezulta astfel ca (t, x1(t)) ∈ ∆ pentru orice t ∈ Ih.
Pentru n = 2 avem:
x2(t) = x0 +
∫ t
t0
f(τ, x1(τ))dτ ;

98 CAPITOLUL 4
si deci |x2(t) − x0| ≤ M |t − t0| ≤ Mh ≤ b, (∀)t ∈ Ih. Rezulta astfel ca(t, x2(t)) ∈ ∆ pentru orice t ∈ Ih.
Etapa II (a implicatiei):Presupunem ca (t,xn(t)) ∈ ∆, (∀) t ∈ Ih si aratam ca (t, xn+1(t)) ∈ ∆,
(∀) t ∈ Ih.Pentru aceasta calculam xn+1(t) si gasim
xn+1(t) = x0 +
∫ t
t0
f(τ, xn(τ))dτ
de unde |xn+1(t) − x0| ≤ M |t − t0| ≤ Mh ≤ b, (∀) t ∈ Ih. Rezulta(t, xn+1(t)) ∈ ∆ pentru orice t ∈ Ih.
Astfel am aratat ca pentru (∀)n ≥ 1 si (∀)t ∈ Ih avem (t, xn(t)) ∈ ∆.
Trecem acum sa evaluam maximul modulului |xn+1(t) − xn(t)| pe Ih.Pentru aceasta, tinem seama de egalitatile:
xn+1(t) = x0 +
∫ t
t0
f(τ, xn(τ))dτ
xn(t) = x0 +
∫ t
t0
f(τ, xn−1(τ))dτ
pe care le scadem si obtinem:
|xn+1(t) − xn(t)| ≤ |K∫ t
t0
|xn(τ) − xn−1(τ)|dτ |
De aici rezulta inegalitatea:
maxt∈Ih
|xn+1(t) − xn(t)| ≤ K
K + 1maxτ∈Ih
|xn(τ) − xn−1(τ)|
din care deducem:
maxt∈Ih
|xn+1(t) − xn(t)| ≤(
K
K + 1
)n
· maxt∈Ih
|x1(t) − x0| ≤
≤(
K
K + 1
)n
·M · h ≤(
K
K + 1
)n
· b

Teoreme de existenta si unicitate pentru ecuatii diferentiale de ordinul ıntai 99
Scriem acum functia xn = xn(t) sub forma:
xn(t) = x0(t) +
n−1∑
i=0
(xi+1(t) − xi(t))
si remarcam ca, sirul xn(t) este sirul sumelor partiale ale seriei de functii
x0(t) +∞∑
n=0
(xn+1(t) − xn(t)).
Deoarece |xn+1(t)−xn(t)| ≤(
K
K + 1
)n
· b, (∀) t ∈ Ih, din convergenta seriei
numerice b ·∞∑
n=0
(K
K + 1
)n
, cu teorema lui Weierstrass, rezulta ca seria de
functii x0(t) +
∞∑
n=0
(xn+1(t) − xn(t)) este absolut si uniform convergenta pe
intervalul Ih, la o functie x = x(t). Prin urmare sirul sumelor partiale, adicasirul xn(t) converge uniform la functia x(t).
Observam ın continuare ca pentru (∀) t ∈ Ih avem∣∣∣∣∫ t
t0
[f(s, xn(s)) − f(s, x(s))]ds
∣∣∣∣ ≤ K · h · maxs∈Ih
|xn(s) − x(s)|
si prin urmare, avem egalitatea:
limn→∞
∫ t
t0
f(s, xn(s))ds =
∫ t
t0
f(s, x(s))ds, (∀)t ∈ Ih.
Trecem acum la limita ın egalitatea
xn+1(t) = x0 +
∫ t
t0
f(τ, xn(τ))dτ

100 CAPITOLUL 4
si obtinem egalitatea
x(t) = x0 +
∫ t
t0
f(τ, x(τ))dτ.
Aceasta arata ca functia x(t) este de clasa C1 si verifica x(t) = f(t, x(t));x(t0) = x0.
Am demonstrat ın acest fel ca problema cu date initiale (4.1) are o solutiedefinita pe intervalul Ih. S-ar putea ca problema (4.1) sa aibe solutie definitape un interval mai mare ca intervalul Ih. Aceasta este motivul pentru caresolutia gasita se numeste solutie locala.
Teorema 4.1.2 (Cauchy-Lipschitz de unicitate a solutiei locale)Daca sunt ındeplinite conditiile din teorema lui Cauchy-Lipschitz de existentaa unei solutii locale a problemei cu date initiale (t0, x0), atunci problema (4.1)nu poate avea doua solutii diferite pe un interval J , Ih ⊃ J ∋ t0
Demonstratie: Presupunem prin absurd ca functiile x, y : J ⊂ Ih → IR1
sunt doua solutii locale ale problemei cu date initiale. Aceste solutii verifica:
x(t) = x0 +
∫ t
t0
f(τ, x(τ))dτ, y(t) = y0 +
∫ t
t0
f(τ, y(τ))dτ.
Rezulta de aici ca, functiile x(t) si y(t) verifica inegalitatea:
|x(t) − y(t)| < ε+K
∣∣∣∣∫ t
t0
|x(τ) − y(τ)|dτ∣∣∣∣ (∀)t ∈ J. (∀)ε > 0.
De aici rezulta ca:
|x(t) − y(t)| ≤ ε · eK|t−t0| (∀)t ∈ J, (∀)ε > 0.
Pentru t ∈ J , t fixat, trecem la limita pentru ε→ 0 si obtinem cax(t) = y(t), (∀)t ∈ J .
Problema 4.1.1Se stie ca materia radioactiva se dezintegreaza si viteza de dezintegrare este

Teoreme de existenta si unicitate pentru ecuatii diferentiale de ordinul ıntai 101
proportionala, la orice moment, cu cantitatea de materie radioactiva ramasa.Daca x(t) reprezinta cantitatea de materie radioactiva ramasa atunci
x = −a · x,
unde a este o constanta pozitiva.
In cazul dezintegrarii carbonului radioactiv C14, a =1
8000si deci ın acest
caz, ecuatia devine x = − 1
8000· x.
Aratati ca, daca la un moment t0 se cunoaste cantitatea de carbon ra-dioactiv C14 dintr-o mostra de animal sau planta gasita ıntr-un strat geologic,atunci se poate reconstitui varsta acelei mostre.
RezolvareFie x0 cantitatea de carbon radioactiv C14 dintr-o mostra la momentul t0.
Problema cu date initiale:
x = − 1
8000· x
x(t0) = x0
are solutie unica si aceasta este data de
x(t; t0, x0) = x0e− 1
8000(t−t0).
Daca x1 este valoarea normala a cantitatii de carbon radioactiv C14 ın stareavie a animalului sau plantei atunci, egaland
x1 = x0e− 1
8000(t−t0)
gasim o ecuatie ın t, care ne da timpul t ın care animalul sau planta erau vii,iar diferenta t− t0 arata varsta mostrei.
Problema 4.1.2Un rezervor cilindric are o gaura circulara la baza prin care lichidul dinrezervor se poate scurge. O ıntrebare asemanatoare cu cea din Problema4.1.1 este urmatoarea: daca la un moment dat vedem ca rezervorul este golputem oare sa stim daca acesta a fost odata plin si cand?
Raspunsul este evident nu. Cum se explica?

102 CAPITOLUL 4
Rezolvare:Fie x(t) ınaltimea lichidului din rezervor la momentul t. Notam cu A ariabazei cilindrului si cu a aria gaurii. Dupa legea lui Toricelli avem:
x = − a
A
√2g ·
√x
Daca I este ınaltimea rezervorului, atunci x = I corespunde la situatia candrezervorul este plin si x = 0 la situatia cand rezervorul este gol. Daca lamomentul t = 0 rezervorul este plin, atunci x(0) = I si avem:
2√u|xI = − a
A
√2g · t
de unde:
x(t) =(√
I − a
2A
√2g · t
)2
.
Timpul de golire este t∗ =2A
a
√I
2gsi deci:
x(t) =
( a
2A
√2g · t∗ −
a
2A·√
2g · t)2
pentru 0 ≤ t ≤ t∗
0 pentru t ≥ t∗
reprezinta legea de golire a rezervorului daca acesta a fost plin lamomentul t = 0.
Exista o infinitate de solutii x(t) ale ecuatiei
x = − a
A
√2g ·
√x
care pentru t = t∗ sunt egale cu zero. Acestea sunt date de formula:
xτ (t) =
2g · a2
4A2(t∗ − t− τ)2 pentru − τ ≤ t ≤ t∗ − τ
0 pentru t ≥ t∗ − τ
Solutia xτ (t) reprezinta legea de golire a rezervorului care la momentul −τ afost plin. Pe langa aceste solutii problema Cauchy
x = −a√
2g
A·√x
x(t∗) = 0

Teoreme de existenta si unicitate pentru ecuatii diferentiale de ordinul ıntai 103
mai are ca solutie functia identic nula x(t) = 0. Aceasta solutiecorespunde situatiei ın care rezervorul nu a fost umplut niciodata. Rezultaastfel ca solutiile problemei Cauchy descriu toate situatiile posibile si multi-tudinea acestora se manifesta prin neunicitatea solutiei problemei Cauchy.
Concluzii
1. Daca variabila de stare x(t) a unui proces fizic sau chimic este solutiaunei probleme cu date initiale x = f(t, x), x(t0) = x0, atunci aceastavariabila de stare trebuie cautata printre solutiile acestei problemeCauchy.
2. Daca problema cu date initiale ın cauza are o singura solutie, atuncigasind-o este clar ca aceasta este cea care descrie evolutia ın timp avariabilei de stare.
3. Daca problema cu date initiale ın cauza are mai multe solutii, atuncigasind una din aceste solutii nu avem nici un drept sa sustinem caaceasta este aceea care descrie evolutia ın timp a variabilei de stare.Mai precis, avem nevoie de informatii suplimentare care sa permitaidentificarea acelei solutii care descrie evolutia variabilei de stare.
4. In caz de neunicitate gasirea unei solutii a problemei cu date initialenu ınseamna rezolvarea problemei de fizica.

104 CAPITOLUL 4
4.2 Teoreme de existenta si unicitate pentru
sisteme de ecuatii diferentiale de ordinul
ıntai neliniare
Definitia 4.2.1 Un sistem de ecuatii diferentiale neliniare de ordinul ıntaiexplicit este un sistem de n relatii de dependenta functionala de forma:
x1 = f1(t, x1, x2, ..., xn)x2 = f2(t, x1, x2, ..., xn)...................................xn = fn(t, x1, x2, ..., xn)
(4.2)
dintre un sistem de n functii necunoscute x1, x2, ..., xn si derivatele acestorax1, x2, ..., xn.
In sistemul (4.2) functiile f1, f2, ..., fn sunt functii reale considerate cunos-cute definite pe I ×D; I ⊂ IR1, I interval deschis si D ⊂ IRn, D domeniu.
Definitia 4.2.2 Un sistem ordonat de n functii reale x1, x2, ..., xndefinitepe un interval J ⊂ I, de clasa C1 este o solutie a sistemului (4.2) daca(t, x1(t), ..., xn(t)) ∈ I × Ω, (∀)t ∈ J si:
dx1
dt= f1(t, x1(t), x2(t), ..., xn(t))
dx2
dt= f2(t, x1(t), x2(t), ..., xn(t))
..................................................dxn
dt= fn(t, x1(t), x2(t), ..., xn(t))
pentru orice t ∈ J.
Definitia 4.2.3 Fiind date: t0 ∈ I si (x01, ..., x
0n) ∈ D problema determinarii
solutiei x1(t), ..., xn(t) a sistemului (4.2) care verifica xi(t0) = x0i pentru
i = 1, n, se numeste problema cu date initiale sau problema Cauchy.
Pentru reprezentarea matriceala a sistemului (4.2) notam F : I×D→ IRn
functia matriceala definita prin
F (t, x1, x2, ..., xn) = (f1(t, x1, ..., xn), f2(t, x1, ..., xn), ..., fn(t, x1, ..., xn))T

Teoreme de existenta si unicitate pentru sisteme de ecuatii diferentiale de ordinul ıntai105
si cu X matricea coloana (x1, x2, ..., xn)T . Cu aceste notatii sistemul (4.2) sescrie sub forma matriceala:
X = F (t, X). (4.3)
In aceasta problema derivarea functiei matriceale X(t) ınseamna derivareaelementelor matricei.
Observatia 4.2.1 Problema cu date initiale (problema Cauchy) se scrie ma-triceal sub forma:
X = F (t, X)
X(t0) = X0
(4.4)
si consta ın determinarea functiei matricealeX(t) care verifica (4.3) si conditiainitiala X(t0) = X0.
Observatia 4.2.2 O functie X : J ⊂ I → IRn de clasa C1 este solutie aproblemei (4.4) daca X = F (t, X(t)), (∀)t ∈ J si X(t0) = X0 (se presupuneca t0 ∈ J).
Consideram a > 0, b > 0 astfel ca cilindrul ∆:
∆ =(t, x) : |t− t0| ≤ a si ‖ x− x0 ‖≤ b
sa fie inclus ın domeniul I ×D.
Teorema 4.2.1 (Cauchy-Lipschitz de existenta a unei solutii locale) Dacafunctia F este continua pe ∆ si este lipschitziana ın raport cu X pe ∆, atunciproblema cu date initiale (4.4) are o solutie locala definita pe intervalul
Ih = [t0 − h, t0 + h] unde h = min
a,
b
M,
1
K + 1
; M = max
(t,x)∈∆‖F (t, X)‖ si
K este constanta lui Lipschitz:
‖F (t, X ′) − F (t, X ′′)‖ ≤ K ‖X ′ −X ′′‖ , (∀) (t, X ′), (t, X ′′) ∈ ∆.

106 CAPITOLUL 4
Demonstratie: Construim urmatorul sir de functii:
X0(t) = X0
X1(t) = X0 +
∫ t
t0
F (τ,X0(τ))dτ
X2(t) = X0 +
∫ t
t0
F (τ,X1(τ))dτ
................
Xk+1(t) = X0 +
∫ t
t0
F (τ,Xk(τ))dτ
................
Functiile din acest sir sunt corect definite, ıntrucat pentru orice t ∈ Ihsi k ∈ IN are loc apartenenta (t, Xk(t)) ∈ ∆ (demonstratia se face prininductie). Urmand rationamentul din paragraful precedent evaluam diferentamaxt∈Ih
‖Xk+1(t) −Xk(t)‖ si gasim:
maxt∈Ih
‖Xk+1(t) −Xk(t)‖ ≤ K
K + 1maxt∈Ih
‖Xk(t) −Xk−1(t)‖,
de unde deducem inegalitatea
maxt∈Ih
‖Xk+1(t) −Xk(t)‖ ≤(
K
K + 1
)k
· b.
Scriem acum functia Xk(t) sub forma:
Xk(t) = X0(t) +
k−1∑
i=0
(X i+1(t) −X i(t)
)
si remarcam ca, sirulXk(t)
k∈IN
este sirul sumelor partiale ale seriei defunctii
X0(t) +
∞∑
i=0
[X i+1(t) −X i(t)
].
Deoarece
‖Xk+1(t) −Xk(t)‖ ≤(
K
K + 1
)k
· b

Teoreme de existenta si unicitate pentru sisteme de ecuatii diferentiale de ordinul ıntai107
pentru orice t ∈ Ih, din convergenta seriei numerice b·∞∑
k=0
(K
K + 1
)k
, folosind
teorema lui Weierstrass, rezulta ca seria de functii
X0(t) +∞∑
k=0
[Xk+1(t) −Xk(t)
]
este absolut si uniform convergenta pe intervalul Ih, la o functie X(t). Astfel,sirul sumelor partiale adica sirul Xk(t), converge uniform la functia X(t).
Inegalitatea:∥∥∥∥∫ t
t0
[F (τ,Xk(τ)) − F (τ,X(τ))]dτ
∥∥∥∥ ≤ K · h · maxτ∈Ih
∥∥Xk(τ) −X(τ)∥∥
valabila pentru orice t ∈ Ih si k ∈ IN permite sa obtinem egalitatea:
limk→∞
∫ t
t0
F (τ,Xk(τ))dτ =
∫ t
t0
F (τ,X(τ))dτ.
Trecem acum la limita ın egalitatea:
Xk+1(t) = X0 +
∫ t
t0
F (τ,Xk(τ))dτ
si obtinem:
X(t) = X0 +
∫ t
t0
F (τ,X(τ))dτ.
Aceasta arata ca functia X(t) este de clasa C1 si verifica
X(t) = F (t, X(t))
X(t0) = X0
In concluzie, problema cu date initiale (4.4) are o solutie definita pe intervalulIh. Este posibil ca problema(4.4) sa aibe solutie definita pe un interval Jmai mare ca intervalul Ih. Acesta este motivul pentru care solutia gasita senumeste solutie locala.
Teorema 4.2.2 (Cauchy-Lipschitz de unicitate a solutiei locale)Daca sunt indeplinite conditiile din teorema Cauchy-Lipschitz de existenta aunei solutii locale pentru problema cu date initiale (t0, X
0), atunci problema(4.4) nu poate avea doua solutii diferite pe un interval J ⊂ Ih, t0 ∈ J .
108 CAPITOLUL 4
Demonstratie: Presupunem prin absurd ca functiile
X ′, X ′′ : J ⊂ Ih → IRn (t0 ∈ J)
sunt doua solutii locale ale problemei cu date initiale (4.4). Aceste solutiiverifica:
X ′(t) = X0 +
∫ t
t0
F (τ,X ′(τ))dτ, X ′′(t) = X0 +
∫ t
t0
F (τ,X ′′(τ))dτ.
De aici rezulta ca X ′(t), X ′′(t) satisfac inegalitatea:
‖X ′(t) −X ′′(t)‖ < ε+K
∣∣∣∣∫ t
t0
‖X ′(τ) −X ′′(τ)‖dτ∣∣∣∣ (∀) t ∈ J, (∀) ε > 0,
de unde se obtine:
‖X ′(t) −X ′′(t)‖ < εeK|t−t0| (∀)t ∈ J, (∀)ε > 0.
Trecand la limita pentru ε→ 0 se obtine egalitatea X ′(t) = X ′′(t),(∀)t ∈ J, t− fixat.

Proprietati calitative ale solutiilor 109
4.3 Proprietati calitative ale solutiilor
Consideram I ⊂ IR1 un interval deschis, D ⊂ IRn un domeniu,F : I × D → IRn o functie vectoriala si sistemul de ecuatii diferentiale deordinul ıntai scris sub forma matriceala:
X = F (t, X). (4.5)
FieX1 : J1 ⊂ I → D siX2 : J2 ⊂ I → D doua solutii locale ale sistemului(4.5).
Definitia 4.3.1 Zicem ca solutia locala X2 este o prelungire a solutiei localeX1 si notam X1 ≤ X2, daca J1 ⊂ J2 si X1(t) = X2(t) pentru orice t ∈ J1.
Relatia binara X1 ≤ X2 introdusa ın multimea solutiilor locale ale sis-temului (4.5) este o relatie de ordine partiala.
Definitia 4.3.2 Orice solutie locala a sistemului (4.5) care este elementmaximal (i.e. nu mai poate fi prelungita) se numeste solutie saturata.
O solutie saturata este o solutie care nu este prelungibila.
Teorema 4.3.1 Daca functia F : I×D → IRn este de clasa C1 pe domeniulΩ = I ×D si (t0, X
0) ∈ I ×D, atunci problema cu date initiale:
X = F (t, X)
X(t0) = X0
(4.6)
are solutie saturata X(t; t0, X0) unica.
Demonstratie: Vom face demonstratia pentru cazul n = 1, cazul n ≥ 2facandu-se analog.
Consideram familia de functii xαα∈Λ, xα : Iα → IR1, t0 ∈ Iα, formatacu toate solutiile locale ale problemei:
x = f(t, x)
x(t0) = x0
(4.7)
Teorema Cauchy-Lipschitz de existenta si unicitate a solutiei locale pentruproblema cu date initiale ın cazul unei ecuatii diferentiale de ordinul ıntai,asigura faptul ca aceasta familie de functii are cel putin un element.

110 CAPITOLUL 4
Consideram intervalul deschis I =⋃
α∈Λ
Iα, precum si functia x = x(t)
definita pe I ın modul urmator:”pentru t ∈ I consideram α ∈ Λ, astfel ca t ∈ Iα si definim x(t) = xα(t)”.Aceasta definitie este corecta daca, pentru orice t ∈ Iα′ ∩ Iα′′ , avem
xα′(t) = xα′′(t). Analizam aceasta implicatie pentru t > t0 (cazul t < t0se trateaza la fel).
Rationam prin reducere la absurd si presupunem ca existat1 > t0, t1 ∈ Iα′ ∩ Iα′′ , astfel ca xα′(t1) 6= xα′′(t1). Consideram ın continuare
t∗ = inft1 : t1 > t0, t1 ∈ Iα′ ∩ Iα′′ , xα′(t1) 6= xα′′(t1)
si remarcam ca
xα′(t∗) = xα′′(t∗) = x∗.
Punctul (t∗, x∗) este ın domeniul Ω, (t∗, x∗) ∈ Ω, si putem consideraconstantele pozitive a∗, b∗, K∗ astfel ca:
- dreptunghiul ∆∗ = (t, x) : |t− t∗| ≤ a∗, |x− x∗| ≤ b∗ sa fie inclus ınΩ (∆∗ ⊂ Ω);
- intervalul [t∗, t∗ + a∗] sa fie inclus ın intersectia Iα′ ∩ Iα′′ ;
- pentru orice t ∈ [t∗, t∗ + a∗] sa avem:
|xα′(t) − x∗| ≤ b∗ si |xα′′(t) − x∗| ≤ b∗;
- pentru orice (t, x), (t, y) ∈ ∆∗ sa avem:
|f(t, x) − f(t, y)| ≤ K∗|x− y|.
Fie acum t1 ∈ [t∗, t∗ + a∗], astfel ca xα′(t1) 6= xα′′(t1). Din definitia lui t∗rezulta ca, exista asemenea puncte t1, oricat de aproape de t∗
Pentru t1 fixat, fie ε > 0 astfel ca ε < |xα′(t1) − xα′′(t1)|e−K∗·a∗ .Pe de alta parte, pentru orice t ∈ [t∗, t∗ + a∗] avem:
xα′(t) = x∗ +
t∫
t∗
f(s, xα′(s))ds,

Proprietati calitative ale solutiilor 111
xα′′(t) = x∗ +
t∫
t∗
f(s, xα′′(s))ds,
din care rezulta inegalitatile:
|xα′(t) − xα′′(t)| ≤t∫
t∗
|f(s, xα′(s)) − f(s, xα′′(s))|ds ≤
≤ K∗
t∫
t∗
|xα′(s) − xα′′(s)|ds < ε+K∗
t∫
t∗
|xα′(s) − xα′′(s))| ds.
Astfel, obtinem ca:
|xα′(t) − xα′′(t)| < εeK∗a∗ , (∀) t ∈ [t∗, t∗ + a∗].
iar din modul de alegere a lui ε rezulta inegalitatea:
|xα′(t) − xα′′(t)| < |xα′(t1) − xα′′(t1)|, (∀) t ∈ [t∗, t∗ + a∗]
care este o contradictie.Astfel, rezulta ın final ca functia x = x(t) este corect definita pe intervalul
I.Urmeaza sa aratam ca functia x = x(t) este solutie a problemei cu date
initiale (4.7).Deoarece pentru orice α ∈ Λ avem xα(t0) = x0, rezulta:
x(t0) = x0.
Fie acum t1 ∈ I si α1 ∈ Λ, astfel ca t1 ∈ Iα1. Pentru orice t ∈ Iα1
, avemx(t) = xα1
(t) si prin urmare
x(t) = xα1(t) = f(t, xα1
(t)) = f(t, x(t)), (∀)t ∈ Iα1.
In particular, pentru t = t1 avem
x(t1) = f(t, x(t1)).
Rezulta ın acest fel ca functia x = x(t) este solutie a problemei cu dateinitiale (4.7).

112 CAPITOLUL 4
Urmeaza sa mai aratam ca functia x = x(t) definita pe intervalul I esteo solutie saturata. Fie ın acest scop y : J → IR1 (J interval deschis, t0 ∈ J)o solutie locala a problemei cu date initiale (4.7).Evident, functia y apartine familiei xαα∈Λ si prin urmare:
J ⊂ I =⋃
α∈Λ
Iα si x(t) = y(t).
Astfel am demonstrat existenta si unicitatea solutiei saturate a problemeicu date initiale (4.7). Aceasta solutie saturata va fi notata cu x = x(t; t0, x0)iar intervalul deschis pe care este definita aceasta solutie saturata va fi notatcu I0.
In conditiile din teorema precedenta consideram solutia saturataX(t; t0, X0)
a problemei Cauchy (4.6) definita pe intervalul deschis I0 = (α0, β0) ⊂ I.
Teorema 4.3.2 Pentru orice t1∈I0 solutia saturata X(t;t1,X(t1;t0,X0)) a
problemei cu date initiale
X = F (t, X), X(t1) = X(t1; t0, X0) = X1 (4.8)
coincide cu solutia saturata X(t; t0, X0).
Demonstratie: Vom face demonstratia pentru cazul n = 1, analog facandu-se ın cazul n ≥ 2.
Notam cu I1 = (α1, β1) intervalul de definitie a solutiei saturate a prob-lemei cu date initiale:
x = f(t, x), x(t1) = x(t1; t0, x0) = x1. (4.9)
Deoarece x(t1; t0, x0) = x1, functia x = x(t; t0, x0) este solutie locala aproblemei cu date initiale (4.9).Rezulta ca I0 ⊂ I1 si x(t; t0, x0) = x(t; t1, x1), (∀) t ∈ I0.
Pe de alta parte, din faptul ca x(t; t0, x0) este solutie saturata, rezulta caI0 ⊃ I1 si x(t; t0, x0) = x(t; t1, x1).
Teorema 4.3.3 Daca sunt ındeplinite urmatoarele conditii:
(i) β0 < +∞ (respectiv α0 > −∞);
(ii) sirul de numere tnn din I0 converge la β0 (respectiv α0);

Proprietati calitative ale solutiilor 113
(iii) sirul de vectori X(tn; t0, X0)n este convergent la un vector Λ,
atunci punctul (β0,Λ) (respectiv (α0,Λ)) apartine frontierei domeniului Ω =I ×D; (β0,Λ) ∈ ∂Ω (respectiv (α0,Λ) ∈ ∂Ω )
Demonstratie: Facem demonstratia pentru n = 1 urmand ca pentru n ≥ 2sa se faca ın mod analog.
Pentru orice t ∈ I0 punctul (t, x(t; t0, x0)) apartine domeniului Ω si, prinurmare, punctul (β0, λ) apartine aderentei domeniului Ω, (β0, λ) ∈ Ω. Putemarata ca (β0, λ) apartine frontierei ∂Ω, aratand ca (β0, λ) nu apartine dome-niului Ω.
Rationam prin reducere la absurd si presupunem ca (β0, λ) ∈ Ω.Consideram a > 0, b > 0, K > 0,M > 0 astfel ca dreptunghiul
∆ = (t, x) : |t− β0| ≤ a, |x− λ| ≤ b
sa fie inclus ın domeniul Ω (∆ ⊂ Ω), functia f sa verifice |f(t, x)| ≤M pentruorice (t, x) ∈ ∆, si |f(t, x)−f(t, y)| ≤ K|x−y| pentru orice (t, x), (t, y) ∈ ∆.
Fie acum ε > 0 astfel ca ε < min
a− 2ε,
b− 2ε
M,
1
K + 1
si t1 < β0
astfel ca |t1 − β0| < ε si |x(t1; t0, x0) − λ| < ε.Solutia saturata x = x(t; t1, x(t1; t0, x0)) a problemei cu date initiale
x = f(t, x), x(t1) = x(t1; t0, x0)
este definita cel putin pe intervalul
Iδ = [t1 − δ, t1 + δ] cu δ = min
a− 2ε,
b− 2ε
M,
1
K + 1
si verifica
x(t; t1, x(t1; t0, x0)) = x(t; t0, x0), (∀) t ∈ Iδ ∩ I0.
Intrucat t1 + δ > t1 + ε > β0, rezulta ca solutia saturata x(t; t0, x0) esteprelungibila, ceea ce este absurd.
Teorema 4.3.4 Daca I = IR1, D = IRn si β0 < +∞ (respectiv α0 > −∞),atunci solutia saturata X(t; t0, X
0) este nemarginita pe [t0, β0) (respectiv(α0, t0]).

114 CAPITOLUL 4
Demonstratie: Pentru cazul n = 1, rationam prin reducere la absurd sipresupunem ca solutia saturata x = x(t; t0, x0) este marginita pe [t0, β0).Consideram m > 0, astfel ca |x(t; t0, x0)| ≤ m, (∀) t ∈ [t0, β0) si tn ∈ [t0, β0)astfel ıncat lim
n→∞tn = β0. Sirul x(tn; t0, x0)n este margint si are un subsir
convergent la un numar λ. Deoarece Ω = IRn punctul (β0, λ) apartine lui Ω,ceea ce este ın contradictie cu teorema precedenta.
Pentru cazul n ≥ 2 se rationeaza ın mod analog.
Teorema 4.3.5 Daca I = IR1, D = IRn si F este lipschitziana pe oricebanda de forma ∆ = J×IRn, unde J ⊂ IR1 este un interval compact oarecare,atunci orice solutie saturata este definita pe IR1.
Demonstratie: Pentru cazul n = 1, rationam prin reducere la absurd sipresupunem ca intervalul de definitie I0 = (α0, β0) al solutiei saturate x =x(t; t0, x0) este marginit la dreapta: β0 < +∞.
Pentru t ∈ [t0, β0) scriem inegalitatea:
|x(t; t0, x0) − x0| ≤t∫
t0
|f(s, x(s : t0, x0))−f(s, x0)|ds+
t∫
t0
|f(s, x0)|ds ≤
≤Kβ0
t∫t0
|x(s; t0, x0)−x0|ds+ (β0 − t0) sups∈[t0,β0]
|f(s, x0)|.
Rezulta de aici ca pentru orice t ∈ [t0, β0] avem:
|x(t; t0, x0) − x0| ≤ (β0 − t0) · sups∈[t0,β0]
|f(s, x0)| · eKβ0(β0−t0).
Aceasta inegalitate arata ca functia x(t; t0, x0) este marginita pe intervalul[t0, β0), ceea ce este ın contradictie cu concluzia din teorema anterioara.
Analog se face rationamentul pentru cazul n ≥ 2.
Consecinta 4.3.1 Daca I = (a, b), D = IRn si β0 < b (respectivα0 > a), atunci solutia saturata este nemarginita pe intervalul [t0, β) (respec-tiv (α0, t0]).
Consecinta 4.3.2 Daca I = (a, b), D = IRn si F este lipschitziana ın raportcu X pe orice banda de forma J × I, unde J ⊂ IR1 este un interval compactinclus ın I, atunci orice solutie saturata este definita pe I.

Proprietati calitative ale solutiilor 115
Teorema 4.3.6 Daca functia de clasa C1, F : IR1 × IRn → IRn nu depindede t, atunci pentru orice X0 ∈ IRn si t1, t2 ∈ IR1, avem:
X(t1 + t2; 0, X0) = X(t2; 0, X(t1; 0, X
0)) = X(t1; 0, X(t2; 0, X0))
Demonstratie: Demonstram teorema pentru n = 1.Se observa ca pentru t2 = 0 au loc:
x(t1 + t2; 0, x0) = x(t2; 0, x(t1; 0, x0)) = x(t1; 0, x(t2; 0, x0)).
In continuare se remarca faptul ca avem egalitatea:
d
dtx(t+ t1; 0, x0) = f(x(t+ t1; 0, x0))
si deducem ca x(t+ t1; 0, x0) este solutia saturata a problemei cu date initiale
x = f(x), x(0) = x(t1; 0, x0).
Rezulta ın acest fel egalitatea:
x(t+ t1; 0, x0) = x(t; 0, x(t1 : 0, x0),
pentru orice t. In particular, pentru t = t2, se obtine prima egalitate dinenunt.
Pentru cazul n ≥ 2 teorema se demonstreaza analog.
Fie I un interval real deschis (I ∈ IR1), Ω un domeniu deschis ın IRn
(Ω ∈ IRn) si F : I×Ω → IRn, F = F (t, X) o functie de clasa C1. Consideramın continuare conditia initiala (t0, X
0) ∈ I × Ω si solutia maximalaX = X(t; t0, X
0) a problemei Cauchy
X = F (t, X), X(t0) = X0.
Notam cu I0 intervalul de definitie al solutiei maximale X = X(t; t0, X0).
Teorema 4.3.7 (de dependenta continua de ”pozitia” initiala X0)Pentru orice interval compact I∗ = [T1, T2], inclus ın intervalul I0(I∗ ⊂ I0),
care contine punctul t0 ın interior (t0 ∈I∗) si pentru orice ε > 0, exista

116 CAPITOLUL 4
δ = δ(ε, I∗), astfel ca, pentru orice X1 cu ‖X1 − X0‖ < δ, solutia saturataX1 = X1(t; t0, X
1) a problemei Cauchy
X = F (t, X)
X(t0) = X1
este definita cel putin pe intervalul I∗ si verifica inegalitatea:
‖X(t; t0, X1) −X(t; t0, X
0)‖ < ε, (∀) t ∈ I∗.
Demonstratie: Pentru t ∈ I∗, fie at > 0 si bt > 0, astfel ca cilindrul∆t = (τ,X) : |τ − t| ≤ at si ‖X − X(t; t0, X
0)‖ ≤ bt sa fie inclus ınmultimea I × Ω ( ∆t ⊂ I × Ω).
Multimea Γ definita prin Γ = (t, X(t; t0, X0)) : t ∈ I∗ este compacta si
este inclusa ın multimea⋃
t∈I∗
∆t; Γ ⊂ ⋃
t∈I∗
∆t . Exista, prin urmare, un numar
finit de puncte t1, t2, . . . , tq ın I∗, astfel ca Γ ⊂q⋃
j=1
∆tj .
Consideram functia d(Y, Z) = ‖Y − Z‖ definita pentru Y ∈ Γ si Z de pe
frontiera multimiiq⋃
j=1
∆tj ; Z ∈ ∂(q⋃
j=1
∆tj ).
Exista r > 0, astfel ca d(Y, Z) > r, pentru orice Y ∈ Γ si Z ∈ ∂(q⋃
j=1
∆tj ).
Tubul de securitate ∆, definit prin:
∆ = (t, X) : t ∈ I∗ si ‖X −X(t; t0, X0)‖ ≤ r
verifica urmatoarele incluziuni:
∆ ⊂q⋃
j=1
∆tj⊂ I × Ω
si exista K > 0, astfel ca, pentru orice (t, X1), (t, X2) ∈ ∆ sa avem:
‖F (t, X1) − F (t, X2)‖ ≤ K · ‖X1 −X2‖
(o functie local Lipschitziana este global Lipschitziana pe compacte).Notam cu h = maxT2 − t0, t0 − T1 si consideram ε, 0 < ε < r. Fie
δ = δ(ε, I∗) = ε · 2−1 · e−Kh si X1, astfel ca ‖X1 − X0‖ < δ. Notam cu

Proprietati calitative ale solutiilor 117
I1 intervalul de definitie a solutiei saturate X = X(t; t0, X1) a problemei
Cauchy:
X = F (t, X)
X(t0) = X1 .
Vom arata acum ca:
‖X(t; t0, X1) −X(t; t0, X
0)‖ < ε
2
pentru orice t ∈ I∗ ∩ I1.Rationam prin reducere la absurd si admitem ca exista t1 ∈ I∗ ∩ I1 astfel
ca ‖X(t1; t0, X1) − X(t1; t0, X
0)‖ ≥ ε
2. De aici rezulta ca, cel putin pentru
unul din numerele α1, α2, definite prin
α1 =inft∈I∗∩I1 : ‖X(τ ; t0, X
1)−X(τ ; t0, X0)‖< ε
2, (∀) τ ∈ [t, t0]
,
α2 =supt∈I∗∩I1 : ‖X(τ ; t0, X
1)−X(τ ; t0, X0)‖< ε
2, (∀) τ ∈ [t0, t]
,
are loc egalitatea
‖X(αi; t0, X1) −X(αi; t0, X
0)‖ =ε
2, i = 1, 2.
Sa presupunem de exemplu ca ‖X(α2; t0, X1) −X(α2; t0, X
0)‖ =ε
2.
Pe de alta parte, pentru orice t ∈ [t0, α2] avem:
‖X(t; t0, X1) −X(t; t0, X
0)‖ ≤ ‖X1 −X0‖+
+K ·t∫
t0
‖X(τ ; t0, X1) −X(τ ; t0, X
0)‖dτ ≤ ‖X1 −X0‖ · eK·h <ε
2.
ceea ce constituie o contradictie si prin urmare:
‖X(t; t0, X1) −X(t; t0, X
0)‖ < ε
2
pentru orice t ∈ I∗ ∩ I1.

118 CAPITOLUL 4
Vom arata ın continuare ca α = inf I1 ≤ T1 si ca β = sup I1 ≥ T2.
Din nou rationam prin reducere la absurd si admitem de exemplu caβ < T2. Pentru orice t ∈ [t0, β) avem inegalitatile:
‖X(t; t0, X1) −X(t; t0, X
0)‖ ≤ ‖X1 −X0‖+
+K ·t∫
t0
‖X(τ ; t0, X1) −X(τ ; t0, X
0)‖dτ ≤ ‖X1 −X0‖ · eK·h <ε
2.
In plus, pentru orice t′, t′′ cu t0 < t′ < t′′ < β avem inegalitatea:
‖X(t′; t0, X1) −X(t′′; t0, X
1)‖ ≤M · |t′′ − t′|,
unde M = sup(t,X)∈∆
‖F (t, X)‖.
Acestea demonstreaza ca exista limita:
λ = limt→β
X(t; t0, X1)
si (β, λ) ∈ ∆. Contradictie.Inegalitatile stabilite sunt valabile deci pe ıntreg intervalul I∗ si astfel
teorema este demonstrata.
Teorema 4.3.8 (de dependenta continua de conditia initiala (t0, X0))
Pentru orice interval compact I∗ = [T1, T2], inclus ın intervalul I0 (I∗ ⊂ I0),
care contine punctul t0 ın interior (t0 ∈I∗) si pentru orice ε > 0, exista
δ = δ(ε, I∗), astfel ca, pentru orice conditie initiala (t1, X1) cu |t1 − t0| < δ
si ‖X1 −X0‖ < δ, solutia saturataX1 = X1(t; t1, X
1) a problemei Cauchy
X = F (t, X)
X(t0) = X1
este definita cel putin pe intervalul I∗ si verifica inegalitatea:
‖X(t; t1, X1) −X(t; t0, X
0)‖ < ε, (∀) t ∈ I∗.

Proprietati calitative ale solutiilor 119
Demonstratie: Fie r > 0 si K > 0, astfel ca tubul ∆, definit prin
∆ = (t, X) : t ∈ I∗, ‖X −X(t; t0, X0)‖ ≤ r
sa fie inclus ın multimea I × Ω (∆ ⊂ I × Ω) si pentru orice(t, X1), (t, X2) ∈ ∆ sa avem
‖F (t, X1) − F (t, X2)‖ ≤ K · ‖X1 −X2‖.
Consideram numerele:
h1 = minT2 − t0, t0 − T1; h2 = maxT2 − t0, t0 − T1;
M = sup(t,X)∈∆
‖F (t, X)‖;
un numar ε, 0 < ε < r si numarul δ = δ(ε, I∗), definit astfel:
δ = 2−1 · minh1, ε · (M + 1)−1 · e−K(h1+h2)
Pentru (t1, X1) cu |t1 − t0| < δ si ‖X1 −X0‖ < δ avem inegalitatile:
T1 < t1 < T2 ,
‖X1 −X(t1; t0, X0)‖ ≤ ‖X1 −X0‖ + ‖X0 −X(t1; t0, X
0)‖ <
< δ · (M + 1) <ε
2< r;
si prin urmare (t1, X1) ∈ ∆ ⊂ I × Ω.
Fie X1 = X(t; t1, X1) solutia maximala a problemei Cauchy:
X = F (t, X)
X(t0) = X1
definita pe intervalul I1.
Vom arata ca ‖X(t; t1, X1) − X(t; t0, X
0)‖ <ε
2pentru orice
t ∈ I∗ ∩ I1.Rationam prin reducere la absurd si admitem ca exista t2 ∈ I∗∩ I1, astfel
ca ‖X(t2; t1, X1) −X(t2, t0, X
0)‖ ≥ ε
2.
Rezulta de aici ca cel putin pentru unul din numerele α1, α2 definite prin
α1 =inft ∈ I∗∩I1 : ‖X(τ ; t0, X
1)−X(τ ; t0, X0)‖< ε
2, (∀) τ ∈ [t, t1]

120 CAPITOLUL 4
α2 =supt ∈ I∗∩I1 : ‖X(τ ; t0, X
1)−X(τ ; t0, X0)‖< ε
2, (∀) τ ∈ [t1, t]
se realizeaza egalitatea:
‖X(αi; t1, X1) −X(αi; t0, X
0)‖ =ε
2, i = 1, 2.
Sa presupunem, de exemplu, ca avem:
‖X(α2; t1, X1) −X(α2; t0, X
0)‖ =ε
2
Pe de alta parte, pentru orice t ∈ [t1, α2] avem inegalitatile:
‖X(t; t1, X1) −X(t; t0, X
0)‖ ≤
≤ ‖X1 −X(t1; t0, X0)‖ +K
t∫
t1
‖X(τ ; t1, X1) −X(τ ; t0, X
0)‖dτ ≤
≤ ‖X1 −X(t1; t0, X0)‖ · eK(h1+h2) < (M + 1) · δ · eK(h1+h2) <
ε
2.
Contradictie.
Prin urmare, ‖X(t; t1, X1) −X(t; t0, X
0)‖ < ε
2, (∀) t ∈ I∗ ∩ I1.
Vom arata ın continuare ca α = inf I1 ≤ T1 si β = sup I1 ≥ T2.Rationam prin reducere la absurd si presupunem de exemplu ca β < T2.
Pentru orice t ∈ [t1, β) avem inegalitatea:
‖X(t; t1, X1) −X(t; t0, X
0)‖ < ε
2
si pentru orice t′, t′′ ∈ [t1, β) :
‖X(t′; t1, X1) −X(t′′; t1, X
1)‖ ≤M · |t′ − t′′|
Aceasta arata ca exista limita λ = limt→β
X(t; t1, X1) si (β, λ) ∈ I × Ω.
Contradictie.Inegalitatile stabilite sunt valabile pe I∗ si astfel teorema este demon-
strata.

Proprietati calitative ale solutiilor 121
Fie I ⊂ IR1 un interval deschis, D ⊂ IRn un domeniu, Ω ⊂ IRm undomeniu, F : I × D × Ω → IRn o functie vectoriala si sistemul de ecuatiidiferentiale de ordinul ıntai cu parametru scris sub forma matriceala:
X = F (t, X, µ) t ∈ I, X ∈ D, µ ∈ Ω. (4.10)
Consideram un punct (t0, X0, µ0) ∈ I ×D × Ω si problema Cauchy:
X = F (t, X, µ0)
X(t0) = X0
(4.11)
Presupunem ca functia F este de clasa C1 ın raport cu (t, X) si este con-tinua ın raport cu parametrul µ si consideram solutia saturataX(t; t0, X
0, µ0)a problemei Cauchy (4.11) definita pe intervalul I0.
Teorema 4.3.9 (de dependenta continua de parametru)Pentru orice interval compact I∗ = [T1, T2] ⊂ I0, care contine punctul t0 ın
interior (t0 ∈I∗) si pentru orice ε > 0, exista δ = δ(ε, I∗) > 0, astfel ıncat,
daca ‖µ − µ0‖ < δ, atunci solutia saturata X = X(t; t0, X0, µ) a problemei
Cauchy
X = F (t, X, µ)
X(t0) = X0
este definita pe intervalul I∗ si verifica inegalitatea:
‖X(t; t0, X0, µ) −X(t; t0, X
0, µ0)‖ < ε
pentru orice t ∈ I∗.
Demonstratie: Fie r1 > 0 si r2 > 0 astfel ca multimea ∆ si S definiteprin:
∆ = (t, X) : t ∈ I∗, ||X −X(t; t0, X0, µ0)|| ≤ r1
S = S(µ0, r2) = µ : ||µ− µ0|| ≤ r2sa verifice ∆ ⊂ I × Ω, respectiv S ⊂ Ω1.
Exista K > 0 astfel ıncat sa avem:
||F (t, X1, µ)−F (t, X2, µ)|| ≤ K · ||X1−X2||, (∀)(t, X1, µ), (t, X2, µ) ∈ ∆×S

122 CAPITOLUL 4
Notam h = maxT2 − t0, t0 − T1 si consideram un numar ε, cu proprietatea0 < ε < r. Fie δ = δ(ε, I∗) astfel ca pentru 0 < δ < r2 si ||µ − µ0|| < δ saavem:
||F (t, X, µ)− F (t, X, µ0)|| < ε · 2−1 · e−Kh , (∀) (t, X) ∈ ∆.
Pentru µ cu proprietatea ||µ − µ0|| < δ consideram solutia saturata X =X(t; t0, X
0, µ) a problemei Cauchy
X = F (t, X, µ)
X(t0) = X0
definita pe intervalul Iµ.
Vom arata ca:||X(t; t0, X
0, µ) −X(t; t0, X0, µ0|| < ε
2
pentru orice t ∈ I∗ ∩ Iµ.Rationam prin reducere la absurd si admitem ca exista t1 ∈ I∗ ∩ Iµ astfel ca
||X(t1; t0, X0, µ) −X(t1; t0, X
0, µ0)|| ≥ ε
2.
Rezulta de aici ca, cel putin pentru unul dintre numerele α1, α2 definite prin:
α1 =inft ∈ I∗∩Iµ : ||X(τ ; t0, X
0, µ)−X(τ ; t0, X0, µ0)||< ε
2, (∀)τ ∈ [t, t0]
α2 =supt ∈ I∗∩Iµ : ||X(τ ; t0, X
0, µ)−X(τ ; t0, X0, µ0)||< ε
2, (∀)τ ∈ [t, t0]
are loc egalitatea:
||X(αi; t0, X0, µ) −X(αi; t0, X
0, µ0)|| =ε
2, i = 1, 2.
Sa admitem de exemplu ca avem:
||X(α2; t0, X0, µ) −X(α2; t0, X
0, µ0)|| =ε
2.
Pe de alta parte, pentru orice t ∈ [t0, α2] au loc inegalitatile:

Proprietati calitative ale solutiilor 123
||X(t; t0, X0, µ) −X(t; t0, X
0, µ0)|| ≤
≤t∫
t0
||F (τ,X(τ ; t0, X0, µ), µ)−F (τ,X(τ ; t0, X
0, µ0), µ0)||dτ≤
≤t∫
t0
||F (τ,X(τ ; t0, X0, µ), µ)−F (τ,X(τ ; t0, X
0, µ0), µ)||dτ≤
≤t∫
t0
||F (τ,X(τ ; t0, X0, µ0), µ)−F (τ,X(τ ; t0, X
0, µ0), µ0)||dτ≤
≤ K ·t∫
t0
||X(τ ; t0X0, µ)−X(τ ; t0, X
0, µ0)||dτ+ε·2−1·e−K·h≤
≤ ε·2−1·e−K·h ·eK(t−t0)<ε
2.
Contradictie.
Prin urmare:
||X(t; t0, X0, µ) −X(t; t0, X
0, µ0)|| < ε
2, (∀)t ∈ I∗ ∩ Iµ.
Vom arata ın continuare ca α = inf Iµ ≤ T1 si β = sup Iµ ≥ T2. Rationamprin reducere la absurd presupunand de exemplu β < T2.
Pentru orice t ∈ [t0, β) are loc inegalitatea:
||X(t; t0, X0, µ) −X(t; t0, X
0, µ0)|| < ε
2
si pentru t′, t′′ ∈ [t0, β] avem:
||X(t′; t0, X0, µ) −X(t′′; t0, X
0, µ)|| < M · |t′ − t′′|
cu
M = sup∆×S
||F (t, X, µ)||

124 CAPITOLUL 4
Rezulta de aici ca exista limita λ = limt→β
X(t; t0, X0, µ) si (β, λ) ∈ I × Ω.
Contradictie.
Calculele facute sunt valabile pe intervalul I∗ si astfel teorema este demon-strata.
Consecinta 4.3.3 Daca functia F = F (t, X, µ) este liniara ın raport cuX ∈ IRn, atunci pentru orice interval I∗ (I∗ ⊂ I) care contine punctul t0ın interior (
I∗∋ t0) si pentru orice ε > 0 exista δ = δ(ε, I∗) > 0 astfel ıncatdaca ||µ− µ0|| < δ, avem:
||X(t; t0, X0, µ) −X(t; t0, X
0, µ0)|| < ε
pentru orice t ∈ I∗.
Demonstratie: Cu teorema lui Banach-Steinhaus se obtine cafunctia ||F (t, ·, µ)|| este marginita pe compacte si
limµ→µ0
F (t, X, µ) = F (t, X, µ0).
Teorema 4.3.10 (de diferentiabilitate ın raport cu conditiile initiale) Inconditiile Teoremei 4.3.7, functia (t, t1, X
1) → X(t; t1, X1) este diferentiabila
ın raport cu t1, X1 si au loc urmatoarele egalitati:
d
dt
(∂X1X(t; t0, X
0))
= ∂XF (t, X(t; t0, X0)) · ∂X1X(t; t0, X
0)
∂X1X(t0; t0, X0) = I
d
dt
(∂t1X(t; t0, X
0))
= ∂XF (t, X(t; t0, X0)) · ∂t1X(t; t0, X
0)
∂t1X(t0; t0, X0) = −F (t0, X
0)
∂t1X(t; t0, X0) = −∂X1X(t; t0, X
0) · F (t0, X0)

Proprietati calitative ale solutiilor 125
Demonstratie: Pentru t ∈ Iδ, X1 ∈ S(X0, δ/2), h ∈ S(0, δ/2) si
Y ∈ IRn consideram functia:
H(t, t0, X1, h, Y ) =
=
1∫
0
∂XF (t, X(t; t0, X1)+s·[X(t; t0, X
1+h)−X(t; t0, X1)])ds
·Y
Functia H definita ın acest mod este continua ın raport cu t si este liniaraın raport cu Y. In plus functia H este continua ın raport cu (t, h).Fie e1, e2, . . . , en baza canonica din Rn si ξ ∈ R astfel ca |ξ| < δ/2.
Problemele Cauchy:
Y kξ = H(t, t0, X
1, ξ · ek, Y kξ )
Y kξ (t0) = ek
Y kξ = H(t, t0, X
1, 0, Y k)
Y k(t0) = ek
au solutii definite pe intervalul Iδ pentru k = 1, 2, . . . , n. In plus pentru oriceinterval compact I∗ ⊂ Iδ avem lim
ξ→0Y k
ξ (t) = Y k(t) uniform ın raport cu t ∈ I∗.
Pe de alta parte pentru ξ 6= 0 avem:
Y kξ (t) =
1
ξ[X(t; t0, X
1 + ξ · ek) −X(t; t0, X1)]
pentru orice t ∈ Iδ.
Prin urmare, exista limita
limξ→0
1
ξ[X(t; t0, X
1 + ξ · ek) −X(t; t0, X1)]
si este egala cu Y k(t) pentru t ∈ Iδ.
Aceasta demonstreaza ca functia X(t; t0, X1) are derivate partiale ın raport

126 CAPITOLUL 4
cu X1 ın punctele (t, t0, X1) si ın plus avem:
d
dt
(∂X
∂x1k
(t, t0, X1)
)= H
(t, t0, X
1, 0,∂X
∂x1k
(t, t0, X1)
)
∂X
∂x1k
(t0, t0, X1) = ek
FunctiaH(t, t0, X1, 0, Y ) fiind continua ın raport cu (t, X1) si liniara ın raport
cu Y rezulta ca solutia problemei Cauchy precedente∂X
∂x1k
(t, t0, X1) converge
la solutia problemei Cauchy:
dY k
dt= H(t, t0, X
0, 0, Y k)
Y k(t0) = ek
pentru X1 → X0 uniform, pe intervale compacte I1 ⊂ Iδ.
Aceasta implica ca derivatele partiale ale functiei X(t; t0, X1) ın raport cu
X1 sunt functii continue ın raport cu X1 ın punctele (t, t0, X0). Deci functia
X(t; t1, X1) este diferentiabila ın raport cu X1 ın punctele (t, t0, X
0) si satis-fac:
d
dt
(∂X1X(t; t0, X
0))
= ∂XF (t, X(t; t0, X0)) · ∂X1X(t; t0, X
0)
∂X1X(t0; t0, X0) = I.
Fie acum τ ∈ IR1 astfel ca 0 < |τ | < δ si apoi functia
Xτ (t) =1
τ·[X(t; t0 + τ,X0) −X(t; t0, X
0)]
pentru t ∈ Iδ.

Proprietati calitative ale solutiilor 127
Avem egalitatile:
τ ·Xτ (t) = X(t; t0 + τ,X0) −X(t; t0, X0) =
= X(t; t0, X(t0; t0 + τ,X0)) −X(t; t0, X0) =
= ∂X1X(t; t0, X0) · [X(t0; t0 + τ,X0) −X0]+
+O(||X(t0; t0 + τ,X0) −X0||) =
= ∂X1X(t; t0, X0)·[X(t0; t0+τ,X
0)−X(t0+τ ; t0+τ,X0)]+
+O(||X(t0; t0 + τ,X0) −X0||) =
= −τ∂X1X(t; t0, X0)
n∑k=1
Fk(t0+θkτ,X(t0+θkτ ; t0+τ,X0)·ek+
+O(||X(t0; t0 + τ,X0) −X0||)
cu 0 < θk < 1 pentru k = 1, n.Astfel,
Xτ (t) = −∂X1X(t; t0, X0)(
n∑
k=1
Fk(t0 + θk · τ,X(t0 + θkτ ; t0 + τ,X0))ek)+
+O(||X(t0; t0+τ,X
0)−X0||)||X(t0; t0+τ,X0)−X0|| · ||X(t0; t0+τ,X
0)−X(t0+τ ; t0+τ,X0)||
τ.
Deoarece raportul1
τ· ||X(t0; t0 + τ,X0)−X(t0 + τ, t0 + τ,X0)|| este marginit
pentru τ → 0 si ||X(t0; t0 + τ,X0)−X0|| → 0 pentru τ → 0 uniform pe oriceinterval compact I∗ ⊂ Iδ(I∗ ∋ t0) rezulta ca
limτ→0
Xτ (t) = −∂X1X(t; t0, X0) · F (t0, X
0)
si deci functia X(t; t1, X1) este deiferentiabila ın raport cu t1 ın (t; t0, X
0).In plus,
∂t1X(t; t0, X0) = −∂X1X(t; t0, X
0) · F (t0, X0).

128 CAPITOLUL 4
Derivabilitatea ın raport cu t a functiei ∂t1X(t; t0, X0) este o consecinta a
acestei egalitati.
In plus avem egalitatile:
d
dt
(∂t1X(t; t0, X
0))
=
= − d
dt
(∂X1X(t; t0, X
0))F (t0, X
0) =
= −∂XF (t, X(t; t0, X0)) · (∂X1X(t; t0, X
0)) · F (t0, X0) =
= ∂XF (t, X(t; t0, X0)) · ∂t1X(t; t0, X
0)
∂t1X(t0; t0, X0) = −F (t0, X
0).
In acest fel teorema de diferentiabilitate ın raport cu conditiile initiale estecomplet demonstrata.
Teorema 4.3.11 (de diferentiabilitate ın raport cu parametru).Daca functia F = F (t, X, µ) satisface conditiile din Teorema 4.3.9 si ın pluseste de clasa C1 ın raport cu µ, atunci functia
(t; t0, X0, µ) → X(t; t0, X
0, µ)
este diferentiabila ın raport cu µ si au loc urmatoarele egalitati:
d
dt(∂µX(t;t0,X
0,µ0)) = ∂XF (t, X(t; t0, X0, µ0), µ0)·∂µX(t; t0, X
0, µ0)+
+ ∂µF (t;X(t; t0, X0, µ0), µ0)
∂µX(t0; t0, X0, µ0) = 0.
Demonstratie: Fie e1, e2, ..., em baza canonica ın spatiul IRm.Pentru t ∈ Iδ, µ
1 ∈ S(µ0, δ2), h ∈ IR1, |h| < δ
2, Y ∈ IRn si k = 1, m

Proprietati calitative ale solutiilor 129
definim functia Hk = Hk(t, t0, X0, µ1, h, Y ) cu formula:
Hk(t, t0, X0, µ1, h, Y ) =
=
1∫
0
∂XF(t,X(t;t0,X0, µ1)+s
[X(t;t0,X
0, µ1+h·ek)−X(t;t0,X0, µ1)
],
µ1+ h·ek)ds
Y +
1∫
0
∂µF (t, X(t; t0, X0, µ1), µ1 + s · h · ek)ds
· ek.
Functia Hk este continua ın raport cu t ∈ Iδ, lipschitziana ın raport cu Ype intervale compacte I∗ ⊂ I. In plus, functia Hk(t, t0, X
0, µ1, h, Y ) tinde laHk(t, t0, X
0, µ1, 0, Y ) pentru h→ 0 uniform pe compacte ın raport cu (t, Y ).
Problemele Cauchy:
dY kξ
dt= Hk(t, t0, X
0, µ1, Y kh )
Y kh (t0) = 0
dY k
dt= Hk(t, t0, X
0, µ1, Y k)
Y k(t0) = 0
au solutii definite pe Iδ si limh→0
Y kh (t) = Y k(t) uniform ın raport cu t pe orice
interval J ⊂ I.Pe de alta parte se verifica usor ca pentru h 6= 0 avem:
Y kh (t) =
1
h[X(t; t0, X
0, µ1 + h · ek) −X(t; t0, X0, µ1)]
si deducem ca functia X(t; t0, X0, µ) are derivate partiale ın raport cu µk ın
(t, t0, X0, µ1) si
d
dt
(∂X
∂µk(t, t0, X
0, µ1)
)= Hk
(t, t0, X
0, µ1, 0,∂X
∂µk(t, t0, X
0, µ1)
)
∂X
∂µk(t0, t0, X
0, µ1) = 0

130 CAPITOLUL 4
Pe de alta parte:
limµ1→µ0
Hk(t, t0, X0, µ1, 0, Y ) = Hk(t, t0, X
0, µ0, 0, Y )
uniform ın raport cu (t, Y ) pe multimi compacte.
Deci∂X
∂µk(t, t0, X
0, µ1) tinde la∂X
∂µk
(t, t0, X
0, µ0)
pentru µ→ µ0 uniform
pe orice interval compact I∗ ⊂ I.
Aceasta demonstraza ca derivatele partiale ın raport cu µk ale functieiX(t; t0, X
0, µ) sunt continue ın raport cu µ ın (t; t0, X0, µ0).
In plus, avem:
d
dt
(∂X
∂µk(t, t0, X
0, µ0)
)=
= ∂XF(t, X(t; t0, X
0, µ0), µ0)· ∂X∂µk
(t; t0, X
0, µ0)+∂F
∂µK
(t, X(t; t0, X
0, µ0), µ0)
∂X
∂µk
(t0; t0, X
0, µ0)
= 0
Prin urmare functia X = X(t; t0, X0, µ) este diferentiabila ın raport cu µ ın
punctul (t, t0, X0, µ0) si pentru orice t ∈ Iδ avem:
d
dt
(∂µX(t; t0, X
0, µ0))
=
∂XF (t, X(t; t0, X0, µ0), µ0) · ∂µX(t; t0, X
0, µ0) + ∂µF (t, X(t; t0, X0, µ0), µ0)
∂µX(t0; t0, X0, µ0) = 0.

Metode numerice 131
4.4 Metode numerice
4.4.1 Metoda liniilor poligonale a lui Euler de deter-
minare numerica locala a unei solutii neprelun-gibile ın cazul sistemelor diferentiale de ordinul
ıntai
Fie I un interval real deschis si nevid I ⊂ IR1, D un domeniu nevid ın spatiulIRn, D ⊂ IRn si F o functie de clasa C1, F : I ×D → IRn.Pentru (t0, X
0) ∈ I ×D consideram solutia neprelungibila X = X(t; t0, X0)
a problemei cu date initiale
X = F (t, X); X(t0) = X0 (4.12)
si notam cu I0 = (α0, β0) ⊂ I intervalul de definitie al acestei solutii.
O prima metoda de determinare numerica locala a solutiei neprelungibileX = X(t; t0, X
0) este cea a liniilor poligonale a lui Euler. In cele ce urmeazavom prezenta aceasta metoda.
Consideram doua constante pozitive a si b, a > 0, b > 0 astfel ca cilindrul
∆ = (t, X)| |t− t0| ≤ a si ‖X −X0‖ ≤ b
sa fie inclus ın domeniul Ω = I ×D; ∆ ⊂ I ×D.Notam cu M maximul functiei F pe cilindrul compact ∆ :
M = max(t,X)∈∆
‖F (t, X)‖
cu α numarul pozitiv α = min
a,
b
M
si cu Iα intervalul
Iα = [t0 − α, t0 + α].
Consideram un numar real si pozitiv ε > 0 si alegem δ = δ(ε) astfel ca pentruorice (t′, X ′), (t′′, X ′′) ∈ ∆ care verifica inegalitatile:
|t′ − t′′| < δ(ε) si ‖X ′ −X ′′‖ < δ(ε)
sa avem ‖F (T ′, X ′) − F (t′′, X ′′)‖ < ε.

132 CAPITOLUL 4
Functia F = F (t, X) este uniform continua pe cilindrul compact ∆ si, deaceea, pentru orice ε > 0, alegerea unui δ(ε) > 0 cu proprietatea mentionataeste posibila.
Consideram acum un numar pozitiv h > 0 pe care-l vom numi pas si pe
care ıl alegem astfel ıncat sa satisfaca inegalitatea 0 < h <δ
M. Fie q numarul
natural cu proprietatea:
tq = t0 + q · h ≤ t0 + α si tq+1 = t0 + (q + 1) · h > t0 + α.
Pentru i = 1, q consideram numerele ti = t0 + ih si t−i = t0 − ih. Acestenumere definesc o diviziune a segmentului Iα.
t0 − α ≤ t−q < t−q+1 < · · · < t−1 < t0 < t1 < · · · < tq−1 < tq ≤ t0 + α.
Pe intervalul [t0, t1] definim functia X1 = X1(t) cu formula
X1(t) = X0 + (t− t0) · F (t0, X0)
iar pe intervalul [t−1, t0] functia X−1 = X−1(t) data de:
X−1(t) = X0 + (t− t0) · F (t0, X0).
Aceste functii verifica urmatoarele inegalitati:
‖X1(t) −X0‖ ≤ b si ‖X1(t) − F (t, X1(t))‖ < ε, (∀) t ∈ [t0, t1]
‖X−1(t) −X0‖ ≤ b si ‖X−1(t) − F (t, X−1(t))‖ < ε, (∀) t ∈ [t1, t0].
In continuare, pe intervalul [t1, t2] definim functia X2 = X2(t) cu formula
X2(t) = X1(t1) + (t− t1) · F (t1, X1(t1)).
si pe intervalul [t−2, t−1] functia X−2 = X−2(t) cu formula
X−2(t) = X−1(t−1) + (t− t1) · F (t−1, X−1(t−1)).
Functiile X2(t) si X−2(t) definite ın acest fel verifica urmatoarele ine-galitati:
‖X2(t) −X0‖ ≤ b si ‖X2(t) − F (t, X2(t))‖ < ε, (∀) t ∈ [t1, t2]
‖X−2(t) −X0‖ ≤ b si ‖X−2(t) − F (t, X−2(t))‖ < ε, (∀) t ∈ [t−2, t−1]

Metode numerice 133
Sa presupunem ca ın acest fel am ajuns sa construim functiileXj = Xj(t), respectiv X−j = X−j(t) definite pe intervalul [tj−1, tj], respectiv[t−j , t−j+1] pentru j = 1, j0, (j0 ≤ q − 1) si ele verifica inegalitatile:
‖Xj(t)−X0‖≤b si ‖Xj(t)−F (t, Xj(t))‖<ε, (∀) t ∈ [tj−1, tj ]
‖X−j(t)−X0‖≤b si ‖X−j(t)−F (t, X−j(t))‖<ε, (∀) t ∈ [t−j , t−j+1]
Definind ın continuare functiileXj0+1(t), respectivX−j0−1(t) pe intervalul[tj0 , tj0+1], respectiv [t−j0−1, t−j0] cu formulele:
Xj0+1(t) = Xj0(tj0) + (t− tj0) · F (tj0, Xj0(tj0))
X−j0−1(t) = X−j0(t−j0) + (t− t−j0) · F (t−j0, X−j0(t−j0))
putem obtine usor ca acestea verifica inegalitatile:
‖Xj0+1(t) −X0‖ ≤ b si ‖Xj0+1(t) − F (t, Xj0+1(t)‖ < ε,(∀) t ∈ [tj0, tj0+1]
‖X−j0−1(t) −X0‖ ≤ b si ‖X−j0−1(t) − F (t, X−j0−1(t)‖ < ε,(∀) t ∈ [t−j0−1, t−j0].
Se obtine ın acest fel ca pentru orice i = 1, q, formulele:
X i(t) = X i−1(ti−1) +(t− ti−1) · F (ti−1, Xi−1(ti−1)),
(∀)t ∈ [ti−1, ti]
X−i(t) = X−i+1(t−i+1) +(t− t−i+1) · F (t−i+1, X−i+1(t−i+1)),
(∀)t ∈ [t−i, t−i+1]definesc functii care verifica inegalitatile:
‖X i(t)−X0‖≤b si ‖X i(t)−F (t, X i(t))‖<ε, (∀) t ∈ [ti−1, ti]
‖X−i(t)−X0‖≤b si ‖X−i(t)−F (t, X−i(t))‖<ε, (∀) t ∈ [t−i, t−i+1]
Consideram acum functia Xε(t) definita pentru t ∈ Iα ın modul urmator:Xε(t) = X i(t) daca t ∈ [ti−1, ti]

134 CAPITOLUL 4
Xε(t) = X−i(t) daca t ∈ [t−i, t−i+1]Xε(t) = Xq(tq) + (t− tq) · F (tq, X
q(tq)) daca t ∈ [tq, t0 + α]Xε(t) = X−q(t−q) + (t− t−q) · F (t−q, X
−q(t−q)) daca t ∈ [t0 − α, t−q]
Functia Xε(t) definita ın acest fel este continua pe intervalul Iα, este deri-vabila pe acest interval cu exceptia eventuala a punctelor tii=1,q si t−ii=1,q
si verifica:
‖Xε(t) −X0‖ ≤ b si ‖Xε(t) − F (t, Xε(t))‖ < ε, t ∈ Iα.
Daca definim functia θε(t) prin:
θε(t) = Xε(t) − F (t, Xε(t)) pentru t 6= ti, t−i i = 1, q si
θε(t) = 0 pentru t = ti sau t−i i = 1, q,
atunci avem:
Xε(t) = X0 +
t∫
t0
F (τ,Xετ ))dτ +
∫ t
t0
θε(τ)dτ,
pentru orice t ∈ Iα cu ‖θε(t)‖ < ε pentru orice t ∈ Iα.
Inegalitatea ‖Xε(t) − X0‖ ≤ b, adevarata pentru orice t ∈ Iα, arata ca‖Xε(t)‖ ≤ b + ‖X0‖, (∀) t ∈ Iα. Rezulta astfel ca familia de functiiXε(t)ε>0 este egal marginita pe Iα = [t0 − α, t0 + α].
Egalitatea:
Xε(t) = X0 +
t∫
t0
F (τ,Xε(τ))dτ +
t∫
t0
θε(τ)dτ, (∀) t ∈ Iα
ımpreuna cu inegalitatea:
‖θε(τ)‖ < ε. (∀) τ ∈ Iα
implica:
‖Xε(t1) −Xε(t2)‖ ≤t2∫
t1
‖F (τ,Xε(τ))‖dτ +
t2∫
t1
‖θε(τ)‖dτ ≤
≤ M |t2 − t1| + ε|t2 − t1| ≤ (M + ε)|t2 − t1|

Metode numerice 135
ceea ce demonstreaza ca functiile Xε(t) sunt echicontinue pe Iα.Cu teorema lui Arzela-Ascoli rezulta ca exista un sir εn → 0, astfel ca
sirul Xεnεnsa fie uniform convergent pe intervalul Iα la o functie continua
X pe intervalul Iα, si aceasta satisface ‖X(t)−X0‖ ≤ b, pentru orice t ∈ Iα.Continuitatea uniforma a functiei F pe cilindrul ∆ si convergenta uni-
forma a sirului de functii Xεn la functia X asigura convergenta uniforma asirului de functii F (τ,Xεn(τ)) la functia F (τ,X(τ)) pe intervalul Iα.
Trecem la limita ın egalitatea:
Xεn(t) = X0 +
t∫
t0
F (τ,Xεn(τ))dτ +
t∫
t0
θεn(τ)dτ
si obtinem ca functia X(t) verifica
X(t) = X0 +
t∫
t0
F (τ,X(τ))dτ, (∀) t ∈ Iα.
Aceasta demonstreaza ca limita X = X(t) este solutia problemei cu dateinitiale
X = F (t, X), X(t0) = X0.
Din teorema de unicitate rezulta ca functia X(t) coincide cu solutia sa-turata X(t; t0, X0) pe intervalul Iα:
X(t) = X(t; t0, X0), (∀) t ∈ Iα.
Se obtine ın acest fel ca functia Xε(t) aproximeaza solutianeprelungibila X(t; t0, X
0) pe intervalul Iα.Valorile functiei Xε(t) ın punctele ti se obtin cu formula de recurenta:
Xε(ti) = Xε(ti−1) + h · F (ti−1, Xε(ti−1)), i = 1, q
iar ın punctele t−i cu formula de recurenta:
Xε(t−i) = Xε(t−i+1) − h · F (t−i+1, Xε(t−i+1)), i = 1, q
Aceste proceduri de trecere de la (ti−1, Xεi−1) la (ti, X
εi ) ori de la
(t−i+1, Xε−i+1) la (t−i, X
ε−i) sunt usor de programat.

136 CAPITOLUL 4
Pentru exemplificare, utilizand procedura de iteratie Euler:
ti+1 = ti + h
X i+1 = X i + h ·mE cu mE = F (ti, Xi),
vom determina solutia numerica pentru o ecuatie diferentiala si respectivpentru un sistem de ecuatii diferentiale de ordinul ıntai.Astfel, vom considera ecuatia liniara:
x = −x+ 2et (4.13)
a carei solutie a fost deja determinata prin calcul simbolic ın Capitolul 2:
x(t) = et + e−t.
Programand ın Maple si utilizand procedura de iteratie Euler se obtine:
> h:=0.1: n:=10:> f:=(t,x)->-x(t)+2*exp(t):
> t:=(n,h)->n*h:
> x:=proc(n,h);
> if n=0 then x(0) else
x(n-1,h)+h*f(t(n-1,h),x(n-1,h)) end if;
> end proc:
> x(0):=2:
> x(t):=[seq(x(i,h),i=0..n)];
x (t) := [2, 2.0, 2.021034184, 2.063211317, 2.126861947,
2.212540692, 2.321030877, 2.453351549,2.610766936, 2.794798428, 3.007239207]
> t:=[seq(t(i,h),i=0..n)];
t := [0.0, 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9, 1.0]
Metode numerice 137
Pentru a compara valorile numerice ale solutiei date de procedurade iteratie Euler cu cele obtinute prin calcul simbolic, vom calcula solutia(obtinuta ın Capitolul 2) ın diferite puncte:
> sol_x(t):=exp(t)+exp(-t):
> eval(sol_x(t),t=0);
eval(sol_x(t),t=0.1); eval(sol_x(t),t=0.2);
eval(sol_x(t),t=0.3);eval(sol_x(t),t=0.9);
22.0100083362.0401335112.0906770292.866172771
Se observa ca rezultatele obtinute prin calcul numeric cu procedura deiteratie Euler sunt apropiate de cele obtinute prin calcul simbolic doar pentruvalori ale lui t apropiate de conditia initiala (zero) aceasta ıntrucat domeniulde convergenta este mic. In concluzie, metoda liniilor poligonale a lui Eulerne da o buna aproximare a solutiei doar pe intervale mici.
In continuare, vom prezenta un alt exemplu ın care vom determina nu-meric (utilizand procedura de iteratie Euler) solutia sistemului de ecuatiidiferentiale:
x1 =−x1+8x2
x2 = x1+ x2
(4.14)
solutie care a fost deja determinata prin calcul simbolic ın Capitolul 4:
x1(t) :=5
3· e3t − 2
3· e−3t,
x2(t) :=5
6· e3t +
1
6· e−3t.
Programand ın Maple se obtine:
138 CAPITOLUL 4
> h:=0.1: n:=10:> f1:=(t,x1,x2)->-x1(t)+8*x2(t): f2:=(t,x1,x2)->x1(t)+x2(t):
> t:=(n,h)->n*h:
> x1:=proc(n,h);
> if n=0 then x1(0) else
x1(n-1,h)+h*f1(t(n-1,h),x1(n-1,h),x2(n-1,h))end if;
> end proc:
> x2:=proc(n,h)
> if n=0 then x2(0)else
x2(n-1,h)+h*f2(t(n-1,h),x1(n-1,h),x2(n-1,h))end if;
> end proc:
> x1(0):=1: x2(0):=1:
> x1(t):=[seq(x1(i,h),i=0..n)];
x1 (t) := [1, 1.7, 2.49, 3.433, 4.6001, 6.07617, 7.966249,
10.4031833, 13.55708001, 17.64726322, 22.95758363]
> x2(t):=[seq(x2(i,h),i=0..n)];
x2 (t) := [1, 1.2, 1.49, 1.888, 2.4201, 3.12212, 4.041949,
5.2427688, 6.80736401, 8.843808412, 11.49291558]
> t:=[seq(t(i,h),i=0..n)];
t := [0.0, 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9, 1.0]
Pentru a compara valorile numerice ale solutiei cu cele obtinuteprin calcul simbolic, vom calcula valorile solutiei obtinute ın Capitolul 4ın cateva puncte:
> sol_x1:=5/3*exp(3*t)-2/3*exp(-3*t):
> sol_x2:=5/6*exp(3*t)+1/6*exp(-3*t):
> eval(sol_x1(t),t=0);
eval(sol_x1(t),t=0.1);eval(sol_x1(t),t=0.2);

Metode numerice 139
eval(sol_x1(t),t=0.3);eval(sol_x1(t),t=0.9);
11.7558858662.6709902433.82829207824.75474919
> eval(sol_x2(t),t=0);
eval(sol_x2(t),t=0.1); eval(sol_x2(t),t=0.2);
eval(sol_x2(t),t=0.3); eval(sol_x2(t),t=0.9);
11.2483520441.6099009392.117430869
12.41097735
Si ın acest caz se observa ca, rezultatele obtinute numeric cu procedurade iteratie Euler sunt apropiate de cele obtinute prin calcul simbolic doar peun interval mic. Deci, si ın cazul sistemelor de ecuatii diferentiale, metodaliniilor poligonale a lui Euler ne da o buna aproximare a solutiei doar peintervale mici.
4.4.2 Metoda Runge-Kutta de determinare numericaa unei solutii neprelungibile ın cazul sistemelor
diferentiale de ordinul ıntai
Cea mai raspandita metoda de determinare numerica a unei solutiineprelungibile este metoda lui Runge-Kutta. Ea a fost pusa la punct lasfarsitul sec. al XIX-lea de matematicienii germani C. Runge si W. Kutta.In esenta, este tot o aproximare a solutiei neprelungibile cu linii poligonale.Convergenta catre solutia saturata este ınsa mult mai rapida decat ın cazulliniilor poligonale a lui Euler. Aceasta datorita modului de alegere a ”pantei”.In practica, sunt folosite cateva forme particulare ale acestei metode: metodaRunge-Kutta de ordinul al doilea rk2, al treilea rk3, al patrulea (standard)

140 CAPITOLUL 4
rk4 si repectiv cea de ordinul al cincilea Fehlberg-Runge-Kutta rkf45.Fara a intra ın detalii privitoare la convergenta, redam aici procedura deiteratie a metodei Runge-Kutta standard rk4:
ti+1 = ti + h
X i+1 = X i + h ·mR−K
unde
mR−K =1
6(m1 + 2m2 + 2m3 +m4)
m1 = F (ti, Xi)
m2 = F (ti + h/2, X i + h/2 ·m1)
m3 = F (ti + h/2, X i + h/2 ·m2)
m4 = F (ti + h,X i + h ·m3).
Aceasta procedura de trecere de la (ti, Xi) la (ti+1, X
i+1) este usor deprogramat.
Pentru exemplificare vom considera aceleasi exemple ca si in cazul metodeiEuler, dupa care vom compara rezultatele numerice obtinute.Programand ın Maple procedura de iteratie Runge-Kutta standard rk4corespunzatoare ecuatiei diferentiale (4.13) obtinem:
> h:=0.1: n:=10:> f:=(t,x)->-x(t)+2*exp(t):
> t:=(n,h)->n*h:
> x:=proc(n,h) local k1,k2,k3,k4;
> if n=0 then x(0) else
k1:=f(t(n-1,h),x(n-1,h));
k2:=f(t(n-1,h)+h/2,x(n-1,h)+h*k1/2);
k3:=f(t(n-1,h)+h/2,x(n-1,h)+h*k2/2);
k4:=f(t(n-1,h)+h/2,x(n-1,h)+h*k3);
x(n-1,h)+h/6*(k1+2*k2+2*k3+k4)
Metode numerice 141
> end if;
> end proc:
> x(0):=2:
> x(t):=[seq(x(i,h),i=0..n)];
x (t) := [2, 2.008211921, 2.036522685, 2.085215637, 2.154778115,
2.245906324, 2.359512308, 2.496733074, 2.658941974,2.847762451, 3.065084284]
> t:=[seq(t(i,h),i=0..n)];
t := [0.0, 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9, 1.0]
> sol_x(t):=exp(t)+exp(-t):
> eval(sol_x(t),t=0);
eval(sol_x(t),t=0.1); eval(sol_x(t),t=0.2);
eval(sol_x(t),t=0.3); eval(sol_x(t),t=0.9);
22.0100083362.0401335112.0906770292.866172771
Comparand aceste rezultate numerice cu cele obtinute cu metoda Eu-ler si apoi cu cele obtinute prin calculul simbolic (din paragraful precedent),observam ca metoda lui Runge-Kutta are domeniul de convergenta ıntregintervalul considerat, solutiile obtinute prin rk4 fiind foarte apropiate de celeobtinute prin calcul simbolic.
Programand ın Maple procedura de iteratie Runge-Kutta standardrk4 corespunzatoare sistemului de ecuatii diferentiale (4.14) obtinem:
> h:=0.1: n:=10:> f1:=(t,x1,x2)->-x1(t)+8*x2(t):f2:=(t,x1,x2)->x1(t)+x2(t):
> t:=(n,h)->n*h:
> x1:=proc(n,h) local k1,k2,k3,k4;
> if n=0 then x1(0) else
k1:=f1(t(n-1,h),x1(n-1,h),x2(n-1,h));
k2:=f1(t(n-1,h)+h/2,x1(n-1,h)+h*k1/2,x2(n-1,h)+h*k1/2);
142 CAPITOLUL 4
k3:=f1(t(n-1,h)+h/2,x1(n-1,h)+h*k2/2,x2(n-1,h)+h*k2/2);
k4:=f1(t(n-1,h)+h/2,x1(n-1,h)+h*k3,x2(n-1,h)+h*k3);
x1(n-1,h)+h/6*(k1+2*k2+2*k3+k4)
> end if;
> end proc:
> x2:=proc(n,h) local m1,m2,m3,m4;
> if n=0 then x2(0) else
m1:=f2(t(n-1,h),x1(n-1,h),x2(n-1,h));
m2:=f2(t(n-1,h)+h/2,x1(n-1,h)+h*m1/2,x2(n-1,h)+h*m1/2);
m3:=f2(t(n-1,h)+h/2,x1(n-1,h)+h*m2/2,x2(n-1,h)+h*m2/2);
m4:=f2(t(n-1,h)+h/2,x1(n-1,h)+h*m3,x2(n-1,h)+h*m3);
x2(n-1,h)+h/6*(m1+2*m2+2*m3+m4)
> end if;
> end proc:
> x1(0):=1: x2(0):=1:
> x1(t):=[seq(x1(i,h),i=0..n)];
x1 (t) := [1., 1.75588586516103406, 2.67099024240189342,
3.82829207712650410, 5.33273206041661840,7.32072833903442266, 9.97254650756094564,13.5286455567960680, 18.3114819804437801,24.7547491716790910, 33.4427034511831920]
> x2(t):=[seq(x2(i,h),i=0..n)];
x2 (t) := [1., 1.24835204296884550, 1.60990093931829237,
2.11743086851170714, 2.81696313624160988,3.77192924966291354, 5.06892269795481632,6.82555099257945131, 9.20109996691309817,12.4109773422481773, 16.7462452598074308]
> t:=[seq(t(i,h),i=0..n)];
t := [0.0, 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9, 1.0]
> sol_x1:=5/3*exp(3*t)-2/3*exp(-3*t):
> sol_x2:=5/6*exp(3*t)+1/6*exp(-3*t):
> eval(sol_x1(t),t=0);
eval(sol_x1(t),t=0.1);eval(sol_x1(t),t=0.2);

Metode numerice 143
eval(sol_x1(t),t=0.3);eval(sol_x1(t),t=0.9);
11.7558858662.6709902433.82829207824.75474919
> eval(sol_x2(t),t=0);
eval(sol_x2(t),t=0.1); eval(sol_x2(t),t=0.2);
eval(sol_x2(t),t=0.3); eval(sol_x2(t),t=0.9);
11.2483520441.6099009392.117430869
12.41097735
Si ın cazul sistemului considerat se observa o buna convergenta a metodeiRunge-Kutta rk4.
4.4.3 Calculul numeric al solutiilor unor ecuatiidiferentiale si sisteme de ecuatii diferentiale
In aceasta sectiune, utilizand metodele de calcul numeric pe care nile ofera programul Maple − ın care sunt incluse programele procedurilorde iteratie Euler sau Runge-Kutta, vom determina solutiile unor ecuatiidiferentiale si respectiv sisteme de ecuatii diferentiale, dupa care, vom re-prezenta grafic aceste solutii.
Primul exemplu se refera la ecuatia diferentiala neliniara de ordinul altreilea cu coeficienti variabili:
t2...x + 5tx+ 4x = ln x, x > 0; (4.15)
> eq3:=t^2*diff(x(t),t,t,t)+5*t*diff(x(t),t,t)+4*diff(x(t),t)
=ln(x(t));
eq3 := t2 d3
dt3x (t) + 5 t d2
dt2x (t) + 4 d
dtx (t) = ln (x (t))
> dsolve(eq3,x(2)=2,D(x)(2)=1/2,(D@@2)(x)(2)=3);
Deoarece Maple nu afiseaza nimic ınseamna ca este incapabil de a gasio solutie utilizand calculul simbolic; mai precis, nu poate exprima solutia
144 CAPITOLUL 4
problemei cu date initiale folosind functii elementare. In acest caz, vomrezolva numeric aceasta ecuatie folosind o sintaxa dsolve care sa permitarezolvarea ecuatiei printr-una din metodele numerice clasice: metoda linilorpoligonale a lui Euler, metoda Runge-Kutta de ordin doi, trei sau patru, etc.Noua sintaxa dsolve/numeric/classical (numerical solution of ordinarydifferential equations), specifica calculului numeric, are una din urmatoareleforme:
dsolve(odesys, numeric, method=classical);
dsolve(odesys, numeric, method=classical[choice], vars, options);
ın care:
odesys - ecuatia sau lista de ecuatii si conditiile initialenumeric - nume care indica lui dsolve sa rezolve prin
metode numericemethod = classical - optionala, se indica numele metodei numerice:
impoly pentru metoda liniilor poligonalea lui Euler; rk2, rk3, rk4 pentru metodalui Runge-Kutta de ordin doi, trei, patru,etc.
vars - lista de variabile dependente (optionala)options - diferite optiuni: output-ul care dorim s,a se
afiseze, numarul de puncte, etc.
Daca nu folosim optiunea ın care sa specifiam o metoda numerica atunci, cal-culatorul va alege metoda Fehlberg-Runge-Kutta de ordinul cinci(method=rkf45 ) − metoda cu cea mai rapida convergenta.
Ecuatia (4.16) se rezolva numeric cu metoda rk4 astfel:
> a:=dsolve(eq3,x(2)=2,D(x)(2)=1/2,(D@@2)(x)(2)=3,numeric,method=classical[rk4],output=listprocedure):
> sol_x := subs(a,x(t)):
> sol_x(0.2);sol_x(0.4);sol_x(1);sol_x(2);
sol_x(5);sol_x(8);sol_x(10);sol_x(30);
Metode numerice 145
178.44235533234686452.28753704236346076.305720744812248312.06.089146019908522349.3117516276734058111.0536870708637434
25.1681506399649386
Prin instructiunea dsolve/numeric/classical, Maple a calculat valorilenumerice ale solutiei ecuatiei considerate ın punctele domeniului de defnitie.Pentru afisarea valorilor solutiei x(t) ın t = 0.2, 0.4, 1, 2, 5, 8, 10, 30 s-a folositfunctia subs.
Pentru reprezentarea grafica a solutiei ecuatiei diferentiale rezolvata nu-meric se utilizeaza o functie de plotare specifica metodelor numerice, careare urmatoarea sintaxa:
odeplot(dsn, vars, range, options);
ın care:
dsn - numele output-ului ecuatiei rezolvata numericvars - variabila independenta si functia care se ploteaza (optional)range - optionaloptions - numarul de puncte, diferite modalitati de afisare a solutiei.
Folosind aceasta instructiune de plotare pentru reprezentarea grafica(Figura 18) a solutiei ecuatiei (4.16) se obtine:
> with(plots):odeplot(sol_x,t=0.2..30,numpoints=100);

146 CAPITOLUL 4
Figura 18
Al doilea exemplu este ecuatia diferentiala liniara de ordinul al doilea:
L · d2i
dt2+R · di
dt+
1
Ci = −E0 · ω · sinωt, (4.16)
a carei solutie i(t) exprima intensitatea curentului ıntr-un circuitR-L-C (vezi Capitolul 3). Considerand valori numerice pentru R,L, C,E0
si reducand ecuatia la un sistem de doua ecuatii diferentiale se obtine:
> R:=2: C:=0.1: L:=1: E=10: ω:=Pi/4:
> Eq:=L*diff(i(t),t,t)+R*diff(i(t),t)+(1/C)*i(t)=-E*ω *sin(t*ω):
> sys_Eq1:=diff(x1(t),t)=x2(t):
> sys_Eq2:=diff(x2(t),t)=-10*x1(t)-2*x2(t)-10*Pi/4*sin(t*Pi/4):
Pentru rezolvarea numerica a acestui sistem si pentru vizualizarea solutiilorcorespunzatoare la diferite conditii initiale (Figura 19 si Figura 20) se folos-esc functiile:
with(DEtools) : DEplotwith(DEtools) : phaseportraitwith(DEtools) : DEplot3d
> with(DEtools):DEplot(sys_Eq1,sys_Eq2,x1(t),x2(t),t=0..15,[[x1(0)=0,x2(0)=0],[x1(0)=1,x2(0)=1],
[x1(0)=3,x2(0)=3]],scene=[t,x1(t)],method=classical[rk4]);
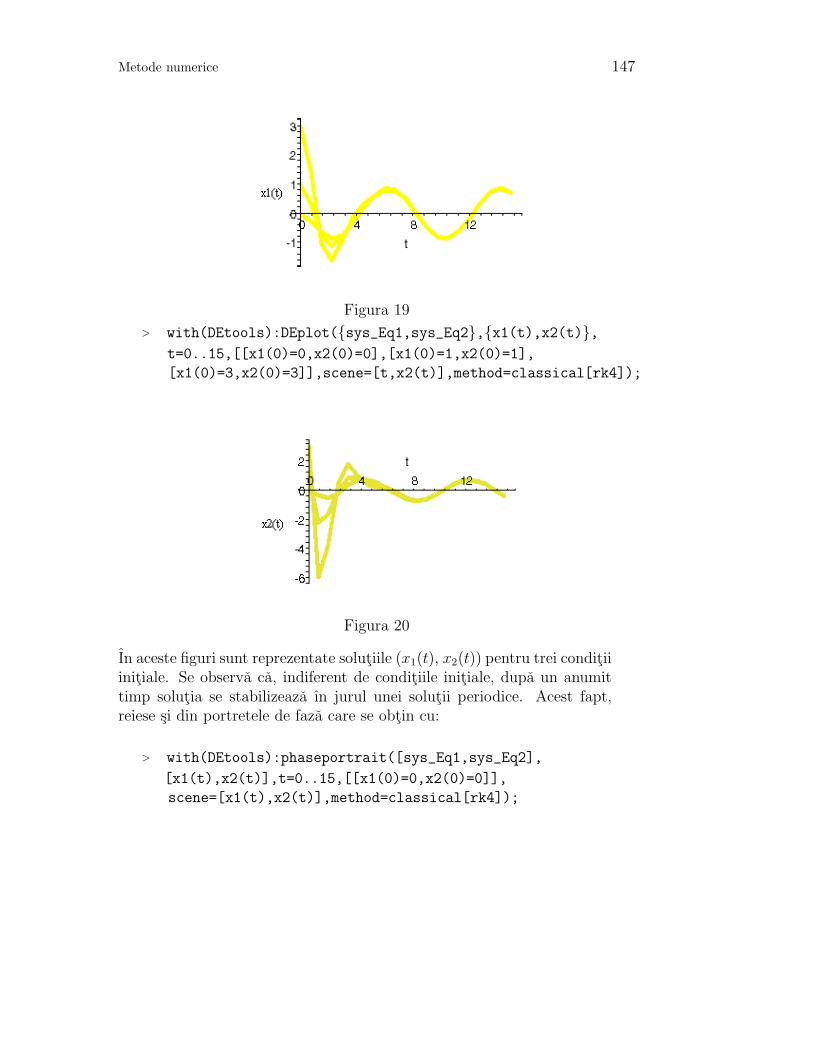
Metode numerice 147
Figura 19
> with(DEtools):DEplot(sys_Eq1,sys_Eq2,x1(t),x2(t),t=0..15,[[x1(0)=0,x2(0)=0],[x1(0)=1,x2(0)=1],
[x1(0)=3,x2(0)=3]],scene=[t,x2(t)],method=classical[rk4]);
Figura 20
In aceste figuri sunt reprezentate solutiile (x1(t), x2(t)) pentru trei conditiiinitiale. Se observa ca, indiferent de conditiile initiale, dupa un anumittimp solutia se stabilizeaza ın jurul unei solutii periodice. Acest fapt,reiese si din portretele de faza care se obtin cu:
> with(DEtools):phaseportrait([sys_Eq1,sys_Eq2],
[x1(t),x2(t)],t=0..15,[[x1(0)=0,x2(0)=0]],
scene=[x1(t),x2(t)],method=classical[rk4]);
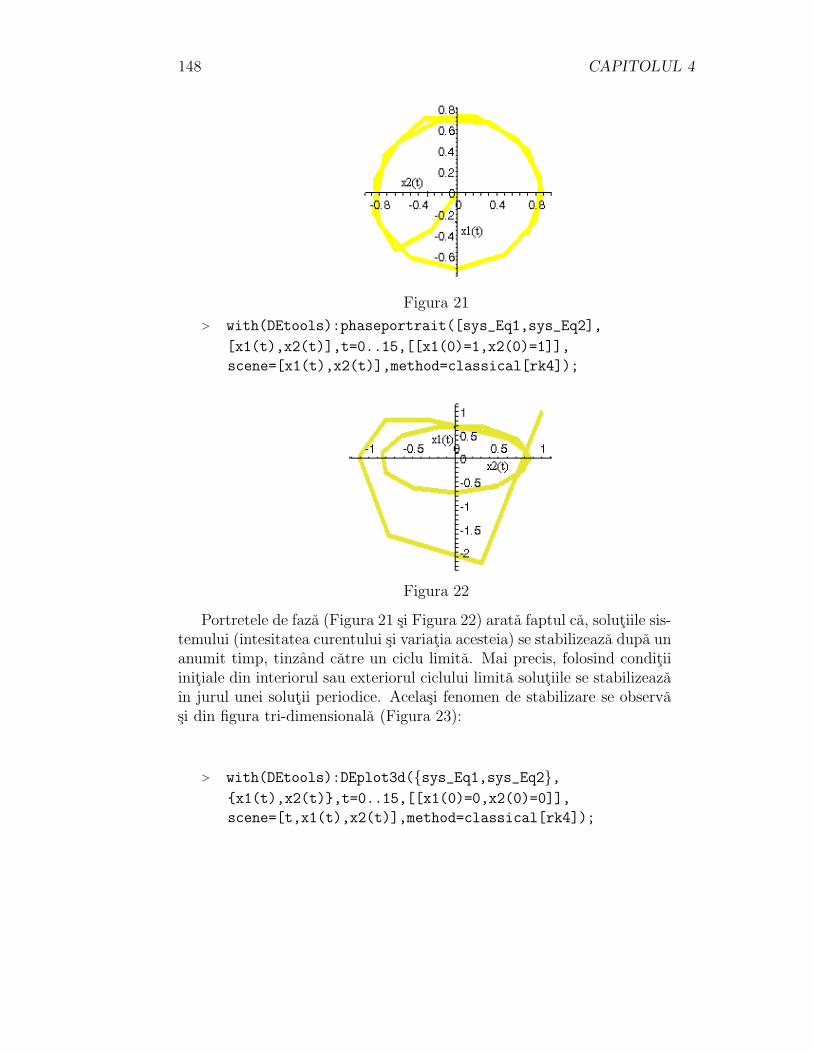
148 CAPITOLUL 4
Figura 21
> with(DEtools):phaseportrait([sys_Eq1,sys_Eq2],
[x1(t),x2(t)],t=0..15,[[x1(0)=1,x2(0)=1]],
scene=[x1(t),x2(t)],method=classical[rk4]);
Figura 22
Portretele de faza (Figura 21 si Figura 22) arata faptul ca, solutiile sis-temului (intesitatea curentului si variatia acesteia) se stabilizeaza dupa unanumit timp, tinzand catre un ciclu limita. Mai precis, folosind conditiiinitiale din interiorul sau exteriorul ciclului limita solutiile se stabilizeazaın jurul unei solutii periodice. Acelasi fenomen de stabilizare se observasi din figura tri-dimensionala (Figura 23):
> with(DEtools):DEplot3d(sys_Eq1,sys_Eq2,x1(t),x2(t),t=0..15,[[x1(0)=0,x2(0)=0]],
scene=[t,x1(t),x2(t)],method=classical[rk4]);
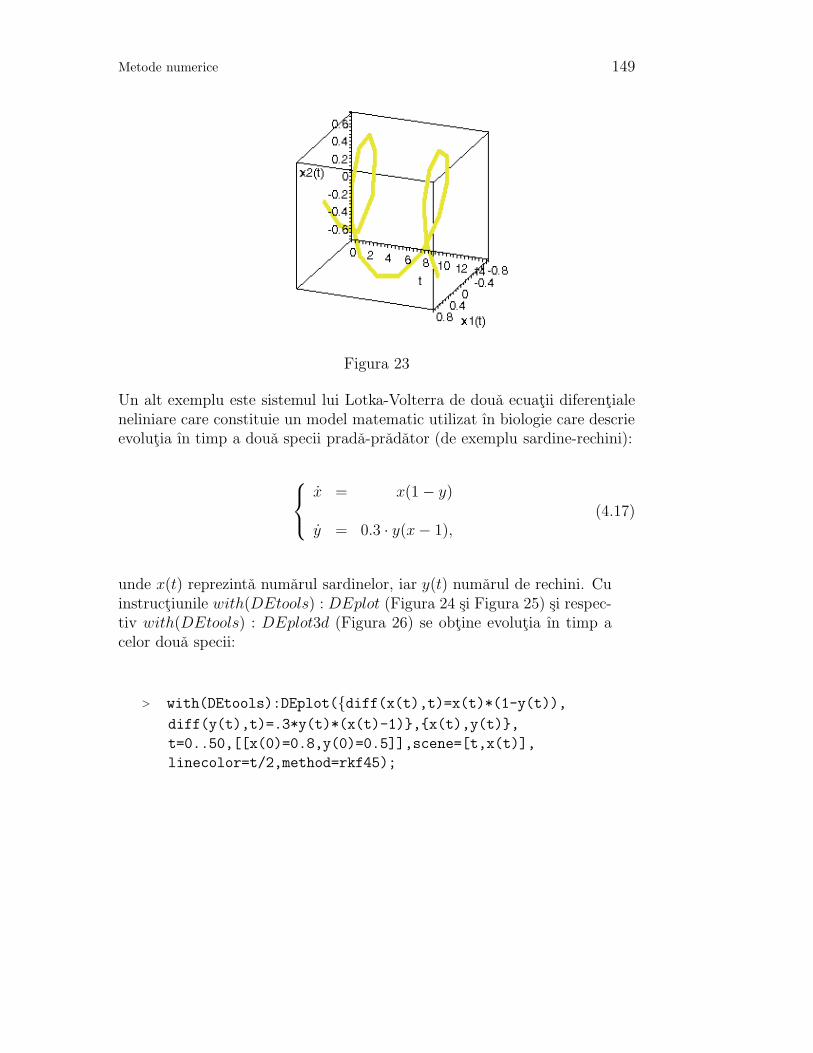
Metode numerice 149
Figura 23
Un alt exemplu este sistemul lui Lotka-Volterra de doua ecuatii diferentialeneliniare care constituie un model matematic utilizat ın biologie care descrieevolutia ın timp a doua specii prada-pradator (de exemplu sardine-rechini):
x = x(1 − y)
y = 0.3 · y(x− 1),(4.17)
unde x(t) reprezinta numarul sardinelor, iar y(t) numarul de rechini. Cuinstructiunile with(DEtools) : DEplot (Figura 24 si Figura 25) si respec-tiv with(DEtools) : DEplot3d (Figura 26) se obtine evolutia ın timp acelor doua specii:
> with(DEtools):DEplot(diff(x(t),t)=x(t)*(1-y(t)),diff(y(t),t)=.3*y(t)*(x(t)-1),x(t),y(t),
t=0..50,[[x(0)=0.8,y(0)=0.5]],scene=[t,x(t)],
linecolor=t/2,method=rkf45);
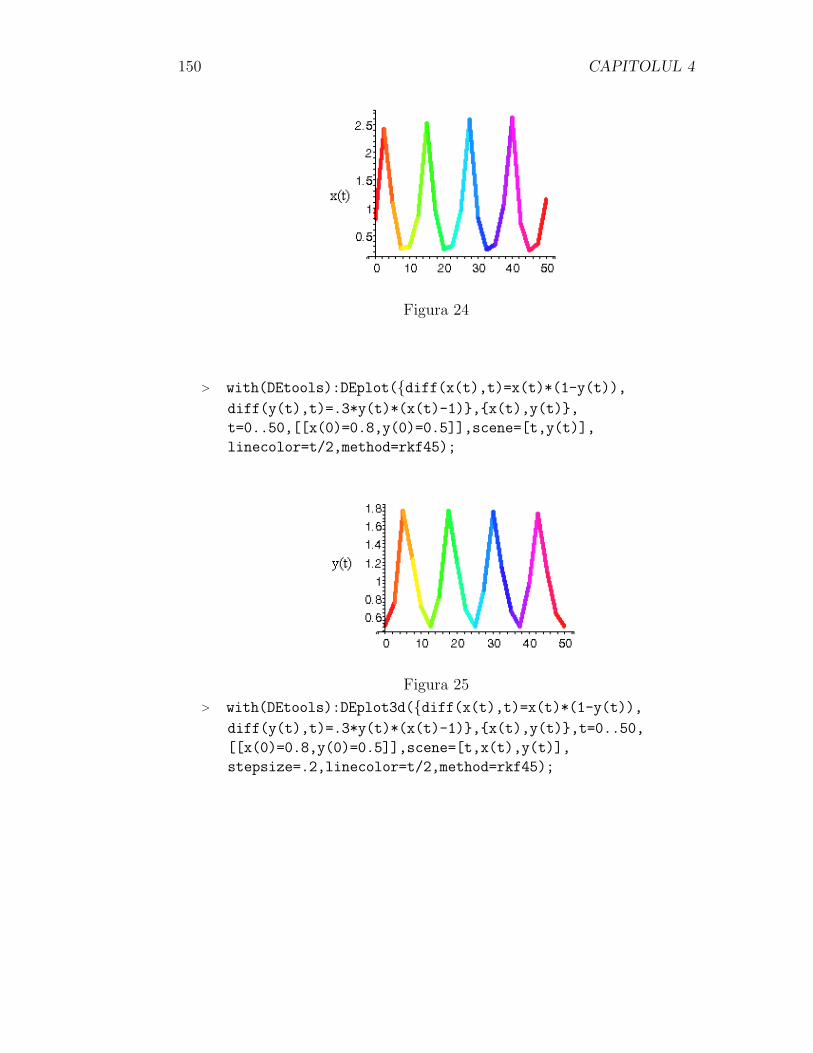
150 CAPITOLUL 4
Figura 24
> with(DEtools):DEplot(diff(x(t),t)=x(t)*(1-y(t)),diff(y(t),t)=.3*y(t)*(x(t)-1),x(t),y(t),
t=0..50,[[x(0)=0.8,y(0)=0.5]],scene=[t,y(t)],
linecolor=t/2,method=rkf45);
Figura 25
> with(DEtools):DEplot3d(diff(x(t),t)=x(t)*(1-y(t)),diff(y(t),t)=.3*y(t)*(x(t)-1),x(t),y(t),t=0..50,
[[x(0)=0.8,y(0)=0.5]],scene=[t,x(t),y(t)],
stepsize=.2,linecolor=t/2,method=rkf45);
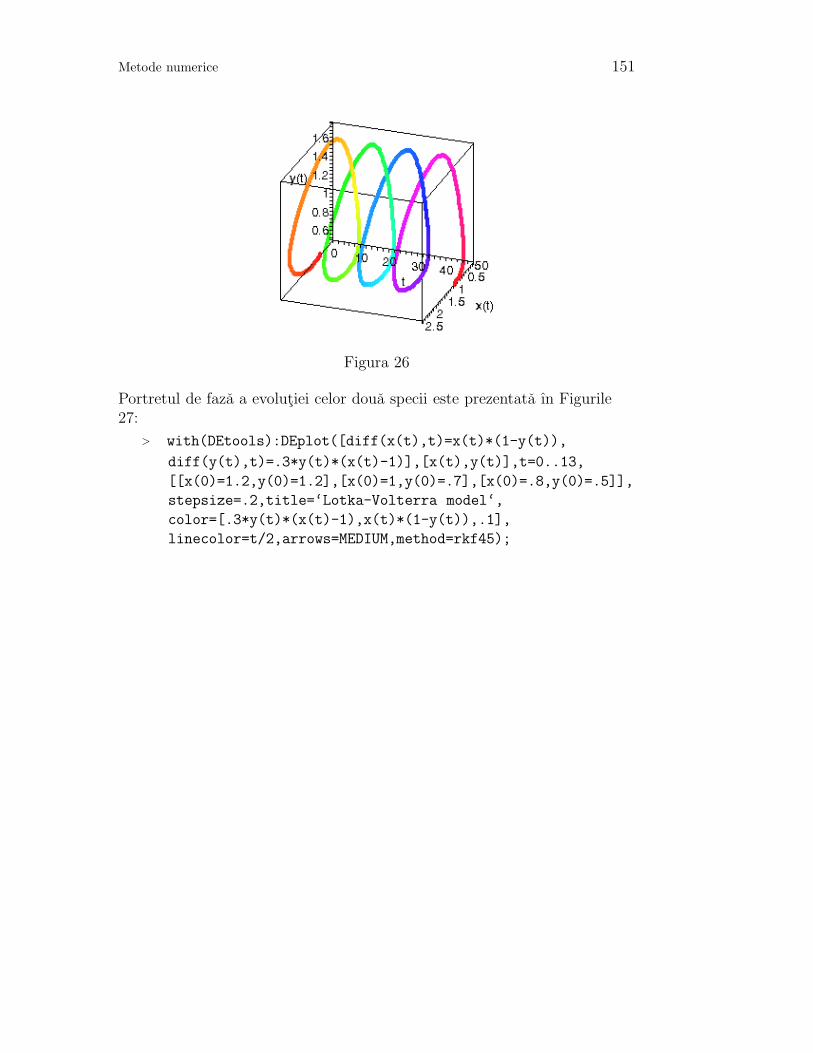
Metode numerice 151
Figura 26
Portretul de faza a evolutiei celor doua specii este prezentata ın Figurile27:
> with(DEtools):DEplot([diff(x(t),t)=x(t)*(1-y(t)),
diff(y(t),t)=.3*y(t)*(x(t)-1)],[x(t),y(t)],t=0..13,
[[x(0)=1.2,y(0)=1.2],[x(0)=1,y(0)=.7],[x(0)=.8,y(0)=.5]],
stepsize=.2,title=‘Lotka-Volterra model‘,
color=[.3*y(t)*(x(t)-1),x(t)*(1-y(t)),.1],
linecolor=t/2,arrows=MEDIUM,method=rkf45);
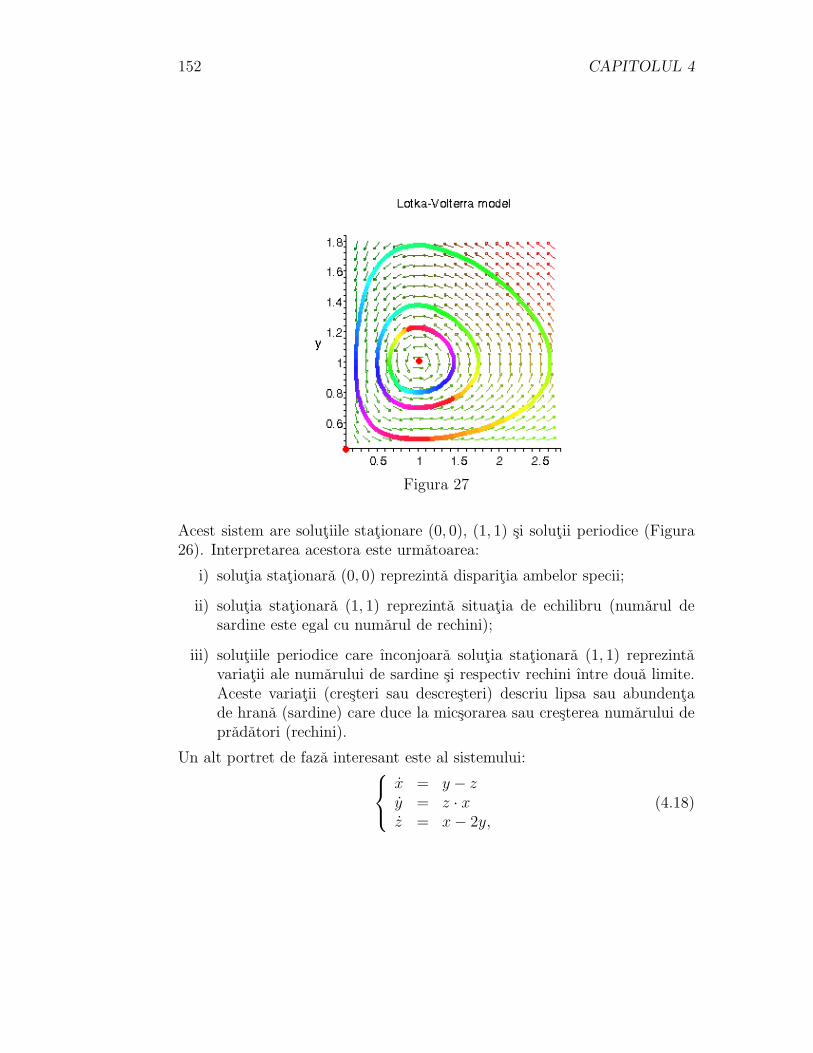
152 CAPITOLUL 4
Figura 27
Acest sistem are solutiile stationare (0, 0), (1, 1) si solutii periodice (Figura26). Interpretarea acestora este urmatoarea:
i) solutia stationara (0, 0) reprezinta disparitia ambelor specii;
ii) solutia stationara (1, 1) reprezinta situatia de echilibru (numarul desardine este egal cu numarul de rechini);
iii) solutiile periodice care ınconjoara solutia stationara (1, 1) reprezintavariatii ale numarului de sardine si respectiv rechini ıntre doua limite.Aceste variatii (cresteri sau descresteri) descriu lipsa sau abundentade hrana (sardine) care duce la micsorarea sau cresterea numarului depradatori (rechini).
Un alt portret de faza interesant este al sistemului:
x = y − zy = z · xz = x− 2y,
(4.18)
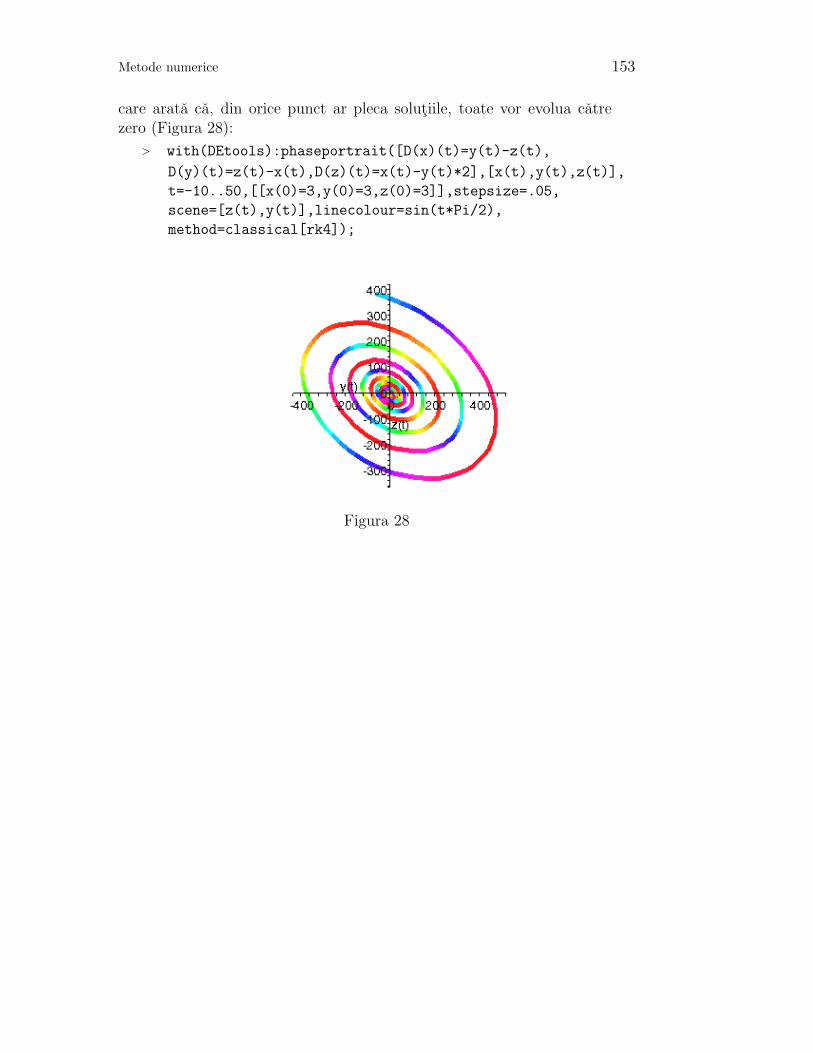
Metode numerice 153
care arata ca, din orice punct ar pleca solutiile, toate vor evolua catrezero (Figura 28):
> with(DEtools):phaseportrait([D(x)(t)=y(t)-z(t),
D(y)(t)=z(t)-x(t),D(z)(t)=x(t)-y(t)*2],[x(t),y(t),z(t)],
t=-10..50,[[x(0)=3,y(0)=3,z(0)=3]],stepsize=.05,
scene=[z(t),y(t)],linecolour=sin(t*Pi/2),
method=classical[rk4]);
Figura 28

154 CAPITOLUL 4
4.5 Integrale prime
Consideram sistemul de ecuatii diferentiale neliniare de ordinul ıntai explicit:
x1 = f1(t, x1, x2, ..., xn)x2 = f2(t, x1, x2, ..., xn)....................................xn = fn(t, x1, x2, ..., xn)
(4.19)
ın care functiile f1, f2, ..., fn sunt functii reale de clasa C1 definite pe I ×D;I ⊂ IR1, I - interval deschis si D ⊂ IRn - domeniu.
Definitia 4.5.1 Se numeste integrala prima a sistemului (4.19) o functieU : I × D → IR1 de clasa C1 care nu este constanta, dar este constanta pesolutiile sistemului (4.19).
Teorema 4.5.1 Conditia necesara si suficienta pentru ca o functieU : I × D → IR1 de clasa C1 neconstanta sa fie integrala prima este ca U
sa verifice:
∂U
∂t+
n∑
i=1
∂U
∂xi
· fi = 0 (∀) (t, x1, ..., xn) ∈ I ×D.
Demonstratie: Fie (t0, x01, ..., x
0n) ∈ I×D si x1(t), ..., xn(t) solutia sistemului
(4.19) care verifica xi(t0) = x0i , i = 1, n si U(t, x1(t), ..., xn(t)) o integrala
prima. Deoarece U(t, x1(t), ..., xn(t)) este constanta, rezulta ca
dU
dt(t, x1(t), ..., xn(t)) ≡ 0.
De aici avem ca
∂U
∂t(t,x1(t), ..., xn(t)) +
n∑
i=1
∂U
∂xi(t, x1(t), ..., xn(t))·fi(t, x1(t), ..., xn(t))=0,
(∀) t ∈ I.
Pentru t = 0, rezulta de aici egalitatea:
∂U
∂t(t0, x
01, ..., x
0n) +
n∑
i=1
∂U
∂xi(t0, x
01, ..., x
0n) · fi(t0, x
01, ..., x
0n) = 0

Integrale prime 155
Intrucat (t0, x01, ..., x
0n) este un punct oarecare din multimea I ×D rezulta
∂U
∂t+
n∑
i=1
∂U
∂t· fi = 0, (∀)(t, x1, ..., xn) ∈ I ×D.
Sa aratam acum implicatia reciproca, adica: dacaU :I×D→IR1 este o functiede clasa C1, care nu este constanta si verifica
∂U
∂t+
n∑
i=1
∂U
∂t· fi = 0
atunci U este constanta pe solutiile sistemului (4.19).In acest scop consideram o solutie oarecare x1(t), ..., xn(t) a
sistemului (4.19) si functia ϕ(t) = U(t, x1(t), ..., xn(t)). Pentru a arata cafunctia ϕ(t) este constanta calculam derivata ei si gasim:
dϕ
dt=
∂U
∂t(t, x1(t), ..., xn(t)) +
+
n∑
i=1
∂U
∂xi(t, x1(t), ..., xn(t)) · fi(t, x1(t), ..., xn(t)) = 0, (∀) t ∈ I.
Astfel, rezulta ca functia ϕ(t) este constanta.
Observatia 4.5.1 Pentru ca o functie U : D → IR1 de clasa C1 neconstantacare nu depinde de t sa fie integrala prima este necesar si suficient ca U sa
verificen∑
i=1
∂U
∂xi
fi = 0.
Definitia 4.5.2 Sistemul (4.19) se zice autonom daca functiile fi nu depindde t; fi : D → IRn, fi = fi(x1, x2, ..., xn), i = 1, n.
Observatia 4.5.2 Problema determinarii miscarii unui punct material demasa m ıntr-un camp de forte potential avand potentialul V , revine la de-terminarea solutiilor sistemului canonic a lui Hamilton:
dxi
dt=
∂H
∂pi
i = 1, 2, 3dpi
dt= −∂H
∂xi
(4.20)

156 CAPITOLUL 4
unde
H(x1, x2, x3, p1, p2, p3) =1
2m(p2
1 + p22 + p2
3) + V (x1, x2, x3)
este functia Hamilton asociata punctului material.
Sistemul (4.20) este autonom, iar conditia ca o functie U(x1, x2, x3, p1, p2, p3)sa fie integrala prima pentru (4.20) este ca U sa verifice
3∑
i=1
(∂U
∂xi
·∂H∂pi
− ∂U
∂pi
·∂H∂xi
)=0.
In particular, rezulta ca functia lui Hamilton este integrala prima pentrusistemul canonic.
Revenim la cazul general al sistemelor autonome:
x1 = f1(x1, ..., xn)x2 = f2(x1, ..., xn)............................xn = fn(x1, ..., xn)
(4.21)
fi : D ⊂ IRn → IR1, i = 1, n pentru care consideram integrale prime Uj,j = 1, m care nu depind de variabila independenta t; Uj = Uj(x1, ..., xn).
Definitia 4.5.3 Un sistem de m ≤ n integrale prime ale sistemului (4.19)se zice independent daca rangul matricei:
∂U1
∂x1
∂U1
∂x2...∂U1
∂xn
∂U2
∂x1
∂U2
∂x2
...∂U2
∂xn
..............................∂Um
∂x1
∂Um
∂x2...∂Um
∂xn
este egal cu m.
In continuare vom arata importanta integralelor prime.

Integrale prime 157
Teorema 4.5.2 Daca se cunosc m < n integrale prime ale sistemului (4.19)atunci problema determinarii solutiilor sistemului (4.19) revine la problemadeterminarii solutiilor unui sistem de n − m ecuatii diferentiale de ordinulıntai.Daca se cunosc n integrale prime atunci problema determinarii solutiilorsistemului (4.19) revine la rezolvarea unui sistem de ecuatii implicite.
Demonstratie: Consideram la ınceput m < n integrale prime U1, ..., Um in-dependente ale sistemului (4.19). Independenta asigura faptul ca din sistemulde ecuatii:
U1(t, x1, ..., xn) − c1 = 0U2(t, x1, ..., xn) − c2 = 0............................Um(t, x1, ..., xn) − cm = 0
(4.22)
putem exprima m dintre necunoscutele x1, ..., xn ın functie de celelalte ne-cunoscute, si ın functie de t si de constantele c1, ..., cm.
Pentru a face o alegere presupunem ca x1, ..., xm se exprima ın functie det, xm+1, ..., xn:
x1 = ϕ1(t, xm+1, ..., xn, c1, ..., cm)x2 = ϕ2(t, xm+1, ..., xn, c1, ..., cm)....................................................xm = ϕm(t, xm+1, ..., xn, c1, ..., cm)
Daca x1(t), ..., xn(t) este o solutie a sistemului (4.19), atunci avem:
x1(t) = ϕ1(t, xm+1(t), ..., xn(t), c1, ..., cm)x2(t) = ϕ2(t, xm+1(t), ..., xn(t), c1, ..., cm)..............................................................xm(t) = ϕm(t, xm+1(t), ..., xn(t), c1, ..., cm)
Rezulta ın acest fel ca primele m componente ale solutiei x1(t), ..., xm(t)se construiesc cu restul componentelor xm+1(t), ..., xn(t) si a constantelorc1, ..., cm prin intermediul functiilor ϕ1, ϕ2, ..., ϕm.
Prin ınlocuire ın sistemul (4.19) rezulta ca xm+1(t), ..., xn(t) verifica urmatorulsistem de ecuatii diferentiale:
dxm+1
dt=fm+1(t, ϕ1(t, xm+1,...,xn, c1,...,cm),...,ϕm(t, xm+1,...,xn, c1,...,cm), xm+1,...,xn)
....................................................................................................................dxn
dt=fn(t, ϕ1(t, xm+1,...,xn, c1,...,cm),...,ϕm(t, xm+1,...,xn, c1,...,cm), xm+1,...,xn)

158 CAPITOLUL 4
Astfel, rezulta ca functiile xm+1, ..., xn verifica un sistem de n−m ecuatiidiferentiale de ordinul ıntai.
Daca m = n atunci sistemul algebric (4.22) este
Uk(t, x1, x2, ..., xn) − ck = 0, k = 1, n
din care obtinem:xk = ϕ(t, c1, ..., cm) k = 1, n.
Imprecis, dar sugestiv putem spune, cu cat avem mai multe integraleprime cu atat mai mult se reduce dimensiunea sistemului diferential. Dacam = n problema rezolvarii sistemului diferential se reduce la rezolvarea unuisistem algebric.
Vom relua ın continuare cateva exemple ın cazul unei singure ecuatii n = 1cand este nevoie doar de o singura integrala prima.
Exemple:
1. Aratati ca daca f : (a, b) → IR1 este functie continua, atunci functia
U(t, x) = x−∫ t
t∗
f(τ)dτ
este integrala prima pentru ecuatia diferentiala x = f(t). Deduceti ınacest fel ca solutiile acestei ecuatii diferentiale sunt solutiile ecuatieialgebrice
x−∫ t
t∗
f(τ)dτ − c = 0.
2. Aratati ca daca g : (c, d) → IR1 este o functie continua care nu seanuleaza, atunci functia
U(t, x) = t−∫ x
x∗
du
g(u)
este integrala prima pentru ecuatia diferentiala x = g(x).
Deduceti astfel ca solutiile acestei ecuatii diferentiale sunt solutiileecuatiei algebrice
t−∫ x
x∗
du
g(u)− c = 0.

Integrale prime 159
3. Aratati ca daca f : (a, b) → IR1 si g : (c, d) → IR1 sunt functii continuesi functia g nu se anuleaza, atunci functia
U(t, x) =
∫ t
t∗
f(τ)dτ −∫ x
x∗
du
g(u)
este integrala prima pentru ecuatia diferentiala x = f(t)·g(x). Deducetide aici ca solutiile acestei ecuatii diferentiale sunt solutiile ecuatiei al-gebrice.
Revenind la cazul general n > 1, problema naturala care se pune este:care este numarul maxim de integrale prime independente pentru sistemul(4.19)?
Raspunsul la aceasta ıntrebare este data de urmatoarea teorema.
Teorema 4.5.3 Pentru orice punct (t0, x01, ..., x
0n) ∈ I×D exista o vecinatate
deschisa V ⊂ I × D astfel ca pe V sistemul (4.19) are n integrale primeindependente si orice integrala prima definita pe V se exprima ca functie decele n integrale prime independente.
Demonstratie: Fie X(t; t0, X0) solutia saturata a sistemului (4.19) care
verifica X(t0) = X0 si I0 intervalul ei de definitie. Consideram un intervalcompact [T1, T2] inclus ın I0 care contine punctul t0 ın interior.
Conform teoremei de continuitate ın raport cu conditiile initiale exista ovecinatate U0 a lui x0 = (x0
1, ..., x0n) astfel ıncat pentru oriceX ′ = (x1
′, ..., xn′) ∈
U0 solutia sistemului (4.19) care coincide cu X ′ ın t = t0 este definita pe[T1, T2]; notam cu X(t; t0, X
′) aceasta solutie saturata.
Functia (t, X ′)ϕ−→ X(t; t0, X
′) este de clasa C1 pe baza teoremei dediferentiabilitate ın raport cu conditiile initiale. Din aceeasi teorema rezulta
ca matricea∂
∂X ′ [X(t; t0, X′)] este nesingulara si prin urmare aplicatiaX ′ ϕ−→
X(t; t0, X′) este local inversabila. Exista deci doua vecinatati deschiseW1,W2
ale punctului (t0, X0) si o functie ψ de clasa C1, ψ : W2 → W1 cu pro-
prietatile: ψ(t, X(t; t0, X′)) ≡ (t, X ′) si X(t; t0, ψ(t, X ′′)) ≡ X ′′ (∀) (t, X ′) ∈
W1 si (t, X ′′) ∈W2.Componentele scalare ψk ale functiei ψ raman constante atunci cand
x1, ..., xn se ınlocuieste cu o solutie a sistemului definita ın vecinatatea con-siderata, deci ψk sunt integrale prime. In plus ψ(t0, X
′) = (t0, X′) de unde
rezulta ca rang
(∂ψk
∂x′r
)= n. Adica integrabile prime ψ1, ..., ψn sunt inde-
pendente.

160 CAPITOLUL 4
Fie acum U o integrala prima oarecare a sistemului (4.1). Conformdefinitiei U(t, X(t; t0, X
′)) nu depinde de t si putem scrie
U(t, X(t; t0, X′)) = h(X ′).
Inlocuind X ′ cu ψ(t, X ′′) si tinand seama de egalitatea
X(t; t0, ψ(t, X ′′)) ≡ X ′′
obtinem:U(t, X ′′) = h(ψ(t, X ′′)).
Aceasta din urma egalitate arata ca integrala prima U este o functie h decele n integrale prime independente ψ1, ..., ψn.
O metoda de determinare a integralelor prime este data de ecuatia:
∂U
∂t+
n∑
i=1
∂U
∂xi· fi = 0
In aceasta ecuatie U este functie necunoscuta si intervine ın ecuatie prin in-termediul derivatelor partiale de ordinul ıntai. De aceea ecuatia aceasta senumeste ecuatie cu derivate partiale de ordinul ıntai. Orice solutie a acesteiecuatii este o integrala prima.
Observam ca daca functiile µ0, µ1, ..., µn sunt astfel ca
µ0 +
n∑
1
µi · fi = 0
si exista o functie U cu proprietatea∂U
∂t= µ0 si
∂U
∂xi= µi, atunci functia U
este integrala prima pentru sistemul (4.19).

Integrale prime 161
Exercitii:
1. Fie sistemul de ecuatii:
x1 = x2
x2 = −x1
Sa se determine o integrala prima.
R:
µ0 = 0, µ1 = x1, µ2 = x2
U(x1, x2) =1
2(x2
1 + x22)
2. In descrierea miscarii solidului rigid intervine sistemul:
A · p = (B − C)g · rB · q = (C − A)r · pC · r = (A− B)p · q
Sa se determine doua integrale prime pentru sistemul considerat.
R: U1(p, q, r) = Ap2 +Bq2 + cr2 si U2(p, q, r) = A2p2 +B2q2 +C2r2.
3. Sa se determine doua integrale prime pentru sistemul:
a)dx
x= −dy
2y=
dz
−z
R:U1(x, y, z) = x√y si U2(x, y, z) = xz.
b)dx
z − y=
dy
x− z=
dz
y − x
R: U1(x, y, z) = x+ y + z si U2(x, y, z) = x2 + y2 + z2.
c)dx
x2(y + z)=
dy
−y2(z + x)=
dz
z2(y − x)
R: U1(x, y, z) = xyz si U2(x, y, z) =1
x+
1
y+
1
z.

162 CAPITOLUL 4
d)dx
xy2=
dy
x2y=
dz
z(x2 + y2)
R: U1(x, y, z) = x2 − y2 si U2(x, y, z) = xyz
.
Capitolul 5
Ecuatii cu derivate partiale deordinul ıntai
5.1 Ecuatii cu derivate partiale de ordinul ıntai
liniare
Definitia 5.1.1 O ecuatie cu derivate partiale de ordinul ıntai liniara esteo relatie de dependenta functionala de forma:
n∑
i=0
∂u
∂xi· fi(x0, x1, . . . , xn) = 0 (5.1)
ıntre derivatele partiale de ordinul ıntai ale functiei necunoscuteu = u(x0, x1, . . . , xn).
Functiile f0, f1, . . . , fn ın ecuatia (5.1) fi : Ω ⊂ IRn+1 → IR1 se consideracunoscute si sunt presupuse functii de clasa C1 pe Ω.
Definitia 5.1.2 O solutie a ecuatiei (5.1) este o functie
u : Ω′ ⊂ Ω → IR1
de clasa C1 astfel ıncat ın toate punctele (x0, x1, . . . , xn) ∈ Ω sa avem verifi-cata identitatea:
n∑
i=0
∂u
∂xi(x0, x1, . . . , xn) · fi(x0, x1, . . . , xn) ≡ 0
163

164 CAPITOLUL 5
Fie ξ = (ξ0, ξ1, . . . , ξn) ∈ Ω astfel ıncat
n∑
i=0
f 2i (ξ0, ξ1, . . . , ξn) 6= 0.
Existenta unui punct ξ ∈ Ω cu aceasta proprietate poate fi admisa pentruca, ın caz contrar, toate functiile fi ar fi identic nule pe Ω de unde ar rezultaca ecuatia (5.1) este verificata, oricare ar fi functia u de clasa C1 pe Ω.Putem admite de asemenea ca f0(ξ0, ξ1, . . . , ξn) 6= 0. Aceasta ıntrucat din
ipoteza
n∑
i=0
fi(ξ0, ξ1, . . . , ξn) 6= 0 rezulta ca exista i0 ∈ 0, 1, . . . , n astfel ca
fi0(ξ) 6= 0. Ceea ce presupunem noi ın plus este faptul ca i0 = 0, adicaf0(ξ) 6= 0.Daca f0(ξ) = 0, atunci se face rationamentul pentru fi0 .Revenim deci la f0(ξ) 6= 0 si deoarece f0 este continua, exista o vecinatateVξ a punctului ξ astfel ca f0(x) 6= 0 pentru orice x ∈ Vξ. Consideram acumsistemul de ecuatii diferentiale:
xi = gi(t, x1, . . . , xn), i = 1, n (5.2)
unde
gi(t, x1, . . . , xn) =fi(t, x1, . . . , xn)
f0(t, x1, . . . , xn)
t fiind componenta x0 a vectorului x = (x0, x1, . . . , xn) ∈ Vξ, t = x0. Sistemul(5.2) este definit pentru (t, x1, . . . , xn) ∈ Vξ,iar functiile gi sunt de clasa C1
pe Vξ.
Teorema 5.1.1 Solutiile ecuatiei (5.1) definite pe V ⊂ Vξ sunt integraleprime ale sistemului (5.2) si reciproc.
Demonstratie: Fie u : V → R1 o solutie a ecuatiei (5.1). Cu notatiileintroduse avem:
∂u
∂t(t, x1, . . . , xn) · f0(t, x1, . . . , xn)+
n∑
k=1
∂u
∂xk(t, x1, . . . , xn) · fk(t, x1, . . . , xn) ≡ 0

Ecuatii cu derivate partiale de ordinul ıntai liniare 165
deci
∂u
∂t(t, x1, . . . , xn) +
n∑
k=1
∂u
∂xk
(t, x1, . . . , xn) · fk(t, x1, . . . , xn)
f0(t, x1, . . . , xn)≡ 0
si prin urmare:
∂u
∂t(t, x1, . . . , xn) +
n∑
k=1
∂u
∂xk(t, x1, . . . , xn) · gk(t, x1, . . . , xn) ≡ 0
ceea ce arata ca u este integrala prima a sistemului (5.2).Cu un rationament asemanator se arata ca daca u este integrala prima pentrusistemul (5.2) atunci este solutie pentru ecuatia (5.1).
Prin urmare, problema determinarii solutiilor ecuatiei (5.1) revine la prob-lema determinarii integralelor prime pentru sistemul (5.2).Tinand seama de cele demonstrate pentru integralele prime ale unui sistem,rezulta ca solutiile ecuatiei cu derivate partiale (5.1) au urmatoarele pro-prietati:
i) oricare ar fi (x00, x
01, . . . , x
0n) ∈ Ω, daca f0(x
00, x
01, . . . , x
0n) 6= 0, atunci
exista o vecinatate deschisa V ⊂ Ω a punctului (x00, x
01, . . . , x
0n) si n
functii u1, . . . , un : V → R1 de clasa C1 astfel ıncat:
a) u1, u2, . . . , un sunt solutii ale ecuatiei (5.1);
b) uk(x00, x1, . . . , xn) = xk;
c) det
(∂uk
∂xl
)6= 0, k, l = 1, 2, . . . , n.
ii) daca u este o solutie oarecare a ecuatiei (5.1) definita pe V ⊂ V ,atunci exista o vecinatate deschisa D a lui (x0
1, . . . , x0n) si o functie
γ : D ⊂ IRn → R1 astfel cau(x0, x1, . . . , xn) == γ(u1(x0, x1, . . . , xn), u2(x0, x1, . . . , xn), . . . , un(x0, x1, . . . , xn)).
Definitia 5.1.3 (Problema Cauchy pentru ecuatia (5.1))Se numeste problema Cauchy pentru ecuatia (5.1) problema determinarii uneisolutii u a ecuatiei (5.1) astfel ca
u(x00, x1, . . . , xn) = h(x1, . . . , xn), (∀)(x1, . . . , xn) ∈ D′ ⊂ D,
unde x00 si functia h : D ⊂ IRn → R1 de clasa C1 sunt date; D fiind o
vecinatate deschisa a lui (x01, . . . , x
0n).

166 CAPITOLUL 5
Teorema 5.1.2 Daca ın (x00, x
01, . . . , x
0n) ∈ Ω avem
f0(x00, x
01, . . . , x
0n) 6= 0
atunci pentru h de clasa C1 definita ıntr-o vecinatate deschisaD a lui (x01, . . . , x
0n)
problema Cauchy are solutie unica.
Demonstratie: Consideram solutiile u1, u2, . . . , un ale ecuatiei (5.1) definiteın vecinatatea deschisa V a lui (x0
0, x01, . . . , x
0n) cu proprietatea
uk(x00, x1, . . . , xn) = xk, k = 1, . . . , n.
Exista o vecinatate V ⊂ V a lui (x00, x
01, . . . , x
0n) astfel ca pentru
(x0, x1, . . . , xn) ∈ V sa avem
(u1(x0, x1, . . . , xn), . . . , un(x0, x1, . . . , xn)) ∈ D.
Fie
u(x0, x1, . . . , xn) = h(u1(x0, x1, . . . , xn), . . . , un(x0, x1, . . . , xn)).
Functia u(x0, x1, . . . , xn) definita astfel este de clasa C1 si verifica ecuatia(5.1):
∂u
∂x0· f 0
0 +
n∑
k=1
∂u
∂xk· fk =
n∑
l=1
∂h
∂yl· ∂ul
∂x0· f0 +
n∑
k=1
n∑
l=1
∂h
∂yl· ∂ul
∂xk· fk =
=
n∑
l=1
∂h
∂yl
(∂ul
∂x0· f0 +
n∑
k=1
∂ul
∂xk· fk
)= 0.
In plus,
u(x00, x1, . . . , xn) = h(u1(x
00, x1, . . . , xn), . . . , un(x
00, x1, . . . , xn)) =
= h(x1, . . . , xn)
deci u este solutia problemei Cauchy.Pentru unicitate sa presupunem ca u este o alta solutie a problemei Cauchydefinita pe V . Rezulta ca exista γ astfel ca
u(x0, x1, . . . , xn) = γ(u1(x0, x1, . . . , xn), . . . , un(x0, x1, . . . , xn)).

Ecuatii cu derivate partiale de ordinul ıntai liniare 167
De aici rezulta ca
h(x1, . . . , xn) = u(x00, x1, . . . , xn) = γ(x1, . . . , xn);
si deci u coincide cu u.Daca ın punctul (x0
0, x01, . . . , x
0n) avem
fk(x00, x
01, . . . , x
0n) 6= 0,
atunci se poate formula un rezultat analog pentru o functie h definita pe ovecinatate deschisa a punctului (x0
0, x01, . . . , x
0k−1, x
0k+1, . . . , x
0n).
Problema 5.1.1O functie u = u(x1, x2, . . . , xn) se zice functie omogena de grad zero ın sensEuler daca pentru orice λ ∈ IR1
+ avem
u(λ · x1, λ · x2, . . . , λ · xn) = u(x1, x2, . . . , xn).
Aratati ca functia u = u(x1, x2, . . . , xn) de clasa C1 este omogena de gradzero ın sens Euler daca si numai daca exista γ = γ(ξ1, ξ2, . . . , ξn−1) astfel ca:
u(x1, x2, . . . , xn) = γ
(x1
xn,x2
xn, . . . ,
xn−1
xn
).
Rezolvare: Din
u(λ · x1, λ · x2, . . . , λ · xn) = u(x1, x2, . . . , xn)
rezulta cad
dλ[u(λ · x1, λ · x2, . . . , λ · xn)] = 0 adica:
x1∂u
∂x1(λ · x1, λ · x2, . . . , λ · xn) + . . .+
xn∂u
∂xn(λ · x1, λ · x2, . . . , λ · xn) = 0, (∀)λ > 0.
Pentru λ = 1 rezulta:
x1∂u
∂x1(x1, x2, . . . , xn) + . . .+ xn
∂u
∂xn(x1, x2, . . . , xn) = 0, (∀)(x1, x2, . . . , xn),
de unde avem ca:
u(x1, x2, . . . , xn) = γ
(x1
xn,x2
xn, . . . ,
xn−1
xn
).

168 CAPITOLUL 5
Exercitii:
1. Rezolvati urmatoarele ecuatii cu derivate partiale de ordinul ıntai liniare:
a) y · ∂u∂x
− x · ∂u∂y
= 0
R: u(x, y) = γ(x2 + y2)
b) x · ∂u∂x
+ y · ∂u∂y
= 0
R: u(x, y) = γ(yx
)
c) x · ∂u∂x
− 2y · ∂u∂y
− z · ∂u∂z
= 0
R: u(x, y, z) = γ(x√y, xz
)
d) xy · ∂u∂x
−√
1 − y2
(y · ∂u
∂y− z · ∂u
∂z
)= xy · ∂u
∂z
R: u(x, y, z) = γ(2yz + x(
(y +
√1 − y2
), x · earcsin y
)
2. Rezolvati urmatoarele probleme Cauchy:
a) x · ∂u∂x
+ y · ∂u∂y
= 0; u(x, 1) = x
R: u(x, y) =x
y

Ecuatii cu derivate partiale de ordinul ıntai liniare 169
b)√x · ∂u
∂x+√y · ∂u
∂y+√z · ∂u
∂z= 0; u(1, y, z) = y − z
R: u(x, y, z) = y + z − 2√yz
c) (1 + x2) · ∂u∂x
+ xy · ∂u∂y
= 0; u(0, y) = y2
R: u(x, y) =y2
1 + x2

170 CAPITOLUL 5
5.2 Ecuatii cu derivate partiale de ordinul ıntai
cvasiliniare
Definitia 5.2.1 O ecuatie cu derivate partiale de ordinul ıntai cvasiliniaraeste o relatie de dependenta functionala de forma:
n∑
i=1
∂u
∂xi
· fi(x1, . . . , xn, u) − g(x1, . . . , xn, u) = 0 (5.3)
dintre functia necunoscuta u = u(x1, . . . , xn) si derivatele partiale∂u
∂xi,i = 1, n ale acesteia.
Functiile f1, . . . , fn si g ın ecuatia (5.3) se considera date:
fi, g : Ω ⊂ IRn+1 −→ R1
si sunt presupuse de clasa C1.Ecuatia (5.3) se numeste cvasiliniara pentru ca este liniara ın derivatele
partiale∂u
∂xk
, dar nu este liniara ın general ın u.
Definitia 5.2.2 O solutie a ecuatiei (5.3) este o functie:
u : D ⊂ Rn −→ R1
de clasa C1 care are proprietatea ca pentru orice (x1, . . . , xn) ∈ D punctul(x1, . . . , xn, u(x1, . . . , xn)) ∈ Ω si
n∑
i=1
∂u
∂xi(x1, . . . , xn) · fi(x1, . . . , xn, u(x1, . . . , xn))−
g(x1, . . . , xn, u(x1, . . . , xn)) ≡ 0
ın D.
Pentru determinarea solutiilor ecuatiei (5.3) consideram ecuatia cu derivatepartiale de ordinul ıntai liniara:
n∑
i=1
∂v
∂xi· fi(x1, . . . , xn, u) +
∂v
∂u· g(x1, . . . , xn, u) = 0 (5.4)
cu (x1, . . . , xn, u) ∈ Ω

Ecuatii cu derivate partiale de ordinul ıntai cvasiliniare 171
Teorema 5.2.1 Daca v este solutie a ecuatiei (5.4) definta pe Ω′ ⊂ Ω, iar(x0
1, . . . , x0n, u
0) ∈ Ω′ si
∂v
∂u(x0
1, . . . , x0n, u
0) 6= 0
atunci functia u = u(x1, . . . , xn) definita implicit prin ecuatia
v(x1, . . . , xn, u) − v(x01, . . . , x
0n, u
0) = 0
este o solutie a ecuatiei (5.3).
Demonstratie: Fie u = u(x1, . . . , xn) functia definita implicit prin ecuatia
v(x1, . . . , xn, u) − v(x01, . . . , x
0n, u
0) = 0.
Avem:v(x1, . . . , xn, u(x1, . . . , xn)) − v(x0
1, . . . , x0n, u
0) ≡ 0
si prin derivare ın raport cu xk gasim:
∂v
∂xk
(x1, . . . , xn, u(x1, . . . , xn))+
∂v
∂u(x1, . . . , xn, u(x1, . . . , xn)) · ∂u
∂xk(x1, . . . , xn) ≡ 0
pentru k = 1, 2, . . . , n.Inmultind pe rand aceste egalitati cu fk(x1, . . . , xn, u(x1, . . . , xn)) si adunandu-le gasim:
n∑
k=1
∂v
∂xk(X, u(X)) · fk(X, u(X))+
∂v
∂u(X, u(X)) ·
n∑
k=1
∂u
∂xk(X, u(X)) · fk(X, u(X)) ≡ 0
unde X = (x1, . . . , xn).Dar v fiind solutie a ecuatiei (5.4) are loc
n∑
k=1
∂v
∂xk(x1, . . . , xn, u(x1, . . . , xn)) · fk(x1, . . . , xn, u(x1, . . . , xn))+

172 CAPITOLUL 5
+∂v
∂u(x1, . . . , xn, u(x1, . . . , xn)) · g(x1, . . . , xn, u(x1, . . . , xn)) ≡ 0
si prin urmare:
∂v
∂u(x1, . . . , xn, u(x1, . . . , xn)) · g(x1, . . . , xn, u(x1, . . . , xn)) =
∂v
∂u(x1, ..., xn, u(x1, ..., xn))·
n∑
k=1
∂u
∂xk(x1, ..., xn)·fk(x1, ..., xn, u(x1, ..., xn)).
Tinem seama de faptul ca∂v
∂u(x1, ..., xn, u(x1, ..., xn)) 6= 0 deducem egali-
tatea:
n∑
k=1
∂u
∂xk
(x1, ..., xn) · fi(x1, ..., xn, u(x1, ..., xn))=g(x1, ..., xn, u(x1, ..., xn)).
Rezulta ın acest fel ca functia u = u(x1, . . . , xn) este solutie a ecuatiei (5.3).Teorema arata ca rezolvarea ecuatiilor cvasiliniare cu derivate partiale deordinul ıntai se reduce la rezolvarea ecuatiilor cu derivate partiale de ordinulıntai liniare.
Definitia 5.2.3 Pentru (x01, . . . , x
0n) ∈ Ω problema gasirii unei solutii
u(x1, . . . , xn) a ecuatiei (5.3) astfel ıncat
u(x01, x2, . . . , xn) = ξ(x2, . . . , xn),
ξ fiind o functie data de clasa C1 se numeste problema Cauchy pentru ecuatia(5.3).
Teorema 5.2.2 Daca f1(x01, . . . , x
0n, ξ(x
02, . . . , x
0n)) 6= 0, atunci exista o
vecinatate deschisa V a punctului (x01, . . . , x
0n) si o solutie u=u(x1, ..., xn)
a ecuatiei (5.3) definita pe V astfel ıncat
u(x01, x2, . . . , xn) = ξ(x2, . . . , xn).
Demonstratie: Exista n solutii v1, v2, . . . , vn ale ecuatiei (5.4) definite pe ovecinatate a punctului (x0
1, . . . , x0n, ξ(x
02, . . . , x
0n)) astfel ıncat
vk(x01, x2, . . . , xn, u) = xk+1, k = 1, 2, . . . , n− 1

Ecuatii cu derivate partiale de ordinul ıntai cvasiliniare 173
sivn(x0
1, x2, . . . , xn, u) = u.
Functia v definita prin:
v(x1, . . . , xn, u) = vn(x1, . . . , xn, u)−−ξ(v1(x1, . . . , xn, u), . . . , vn−1(x1, . . . , xn, u))
este solutie a ecuatiei (5.4) (este obtinuta ca functie de cele n integrale primeindependente) si
v(x01, x2, . . . , xn, u) = u− ξ(x2, . . . , xn).
Din teorema functiilor implicite rezulta ca exista o vecinatate V a punctului(x0
1, . . . , x0n) si o functie u = u(x1, . . . , xn) de clasa C1 definita pe aceasta
vecinatate astfel ıncat
v(x1, . . . , xn, u(x1, . . . , xn)) ≡ 0.
Deoarece∂v
∂u(x1, . . . , xn, u(x1, . . . , xn)) 6= 0
din teorema precedenta rezulta ca u = u(x1, . . . , xn) este solutie a ecuatiei(5.3).Avem:
v(x1, . . . , xn, u(x1, . . . , xn))−−ξ(v1(x1, ..., xn, u(x1, ..., xn)), . . . , vn−1(x1, ..., xn, u(x1, ..., xn)) ≡ 0
deci ın xi avem:
u(x01, x2, . . . , xn) − ξ(x2, . . . , xn) ≡ 0.
Observatia 5.2.1 O ecuatie cu derivate partiale de ordinul ıntai de forma:n∑
i=1
∂u
∂xi· fi = g (5.5)
se numeste ecuatie cu derivate partiale de ordinul ıntai liniara si neomogena.Aceasta denumire se datoreaza faptului ca pentru g = 0 ecuatia (5.5) este oecuatie cu derivate partiale de ordinul ıntai liniara (si omogena). In ecuatia(5.5), functiile f1, . . . , fn si g sunt functii de clasa C1 si depind de variabilele(x1, . . . , xn) ∈ Ω.Ecuatia (5.5) se rezolva ca si ecuatiile cu derivate partiale de ordinul ıntaicvasiliniare.

174 CAPITOLUL 5
Exercitii:
1. Rezolvati urmatoarele ecuatii cu derivate partiale de ordinul ıntai cvasiliniare:
a)∂u
∂x· (1 +
√u− x− y) +
∂u
∂y= 2
R: γ(u− 2y, y + 2√u− x− y) = 0
b)n∑
i=1
xi ·∂u
∂xi
= m · u
R: γ
(x1
xn
,x2
xn
, . . . ,xn−1
xn
,u
xmn
)= 0
c) xy · ∂u∂x
− y2 · ∂u∂y
+ x(1 + x2) = 0
R: γ
(xy u+
x2
2+x2
4, xy
)= 0
d) 2y4 · ∂u∂x
− xy · ∂u∂y
= x√u2 + 1
R: γ(x2 + y4, y
(u+
√u2 + 1
))= 0
2. Rezolvati urmatoarele probleme Cauchy:
a)∂u
∂x− ∂u
∂y=y − x
u, u(1, y) = y2
R: u2(x, y, z) = (x+ y − 1)4 + 2xy − 2(x+ y − 1)
b) xy · ∂u∂x
− y2 · ∂u∂y
= x, u(1, y) =3
2y
R: u(x, y) =x2 + 2
2xy
Ecuatii cu derivate partiale de ordinul ıntai cvasiliniare 175
c) u · ∂u∂x
+ (u2 − x2) · ∂u∂y
+ x = 0, u(x, x2) = 2x
R: y2 + u2(x, y) = 5 (x · u(x, y) − y)

176 CAPITOLUL 5
5.3 Calculul simbolic al solutiilor ecuatiilor
cu derivate partiale de ordinul ıntai
Pentru calculul simbolic al solutiilor ecuatiilor cu derivate partiale deordinul ıntai Maple foloseste functia pdsolve (find solutions for partialdifferential equations (PDEs) and systems of PDEs) cu una din urmatoarelesintaxe :
pdsolve(PDE, f, INTEGRATE, build);
pdsolve(PDE system, funcs, other options);
ın care:
PDE - ecuatia cu derivate partiale pe care dorim sa o rezolvamf - numele functiei necunoscute (implica existenta derivatelor
partiale ale mai multor functii)INTEGRATE -(optional) indica integrarea automata a ecuatiilor
diferentiale ordinare care intervin atunci cand PDE esterezolvata cu metoda separarii variabilelor
build - (optional) indica afisarea unei forme explicite (dacaeste posibil) a solutiei
Pentru exemplificare, consideram ecuatia cu derivate partiale de ordinul ıntailiniara:
y · ∂u∂x
− x · ∂u∂y
= 0 (5.6)
Cu instructiunea pdsolve se obtine solutia generala (toate solutiile) aecuatiei:
> PDE1 := y*diff(u(x,y),x)-x*diff(u(x,y),y) = 0;
PDE1 := y ∂∂xu (x, y) − x ∂
∂yu (x, y) = 0
> pdsolve(PDE1);
u (x, y) = F1 (x2 + y2)

Calculul simbolic al solutiilor ecuatiilor cu derivate partiale de ordinul ıntai 177
Se observa ca, solutia generala este afisata cu ajutorul unei functii F1 carepoate fi orice functie de clasa C1. Pentru determinarea unei anumite solutiiavem nevoie de o conditie initiala, dar ın sintaxa functiei pdsolve prezentataanterior nu exista nici un parametru care sa specifice utilizarea acesteia.
In cele ce urmeaza, vom mai determina solutia generala pentru o ecuatiecu derivate partiale de ordinul ıntai ın care functia necunoscuta este de treivariabile x, y, z:
√x · ∂u
∂x+√y · ∂u
∂y+√z · ∂u
∂z= 0 (5.7)
> PDE3 :=sqrt(x)*diff(u(x,y,z),x)+sqrt(y)*diff(u(x,y,z),y)+
sqrt(z)*diff(u(x,y,z),z) = 0;
PDE3 :=√x ∂
∂xu (x, y, z) +
√y ∂
∂yu (x, y, z) + sqrtz ∂
∂zu (x, y, z) = 0
> pdsolve(PDE3);
u (x, y, z) = F1(√
x−√y,√z −√
y)
Capitolul 6
Ecuatii cu derivate partiale deordinul al doilea liniare
6.1 Clasificarea ecuatiilor cu derivate partiale
de ordinul al doilea liniare (clasificarea
problemelor de fizica - matematica)
Definitia 6.1.1 O ecuatie cu derivate partiale de ordinul al doilea liniaraeste o relatie de dependenta functionala de forma:
n∑
i=1
n∑
j=1
aij ·∂2u
∂xi∂xj+
n∑
i=1
bi ·∂u
∂xi+ c · u+ f = 0 (6.1)
dintre functia necunoscuta u = u(x1, . . . , xn), derivatele partiale de ordinulıntai si de ordinul al doilea ale acesteia.Functiile aij , bi, c, f : Ω ⊂ IRn → IR1 din ecuatia (6.1) se considera cunoscutesi sunt presupuse cel putin continue pe Ω.
Definitia 6.1.2 O solutie clasica a ecuatiei (6.1) este o functieu : D ⊂ Ω → IR1 de clasa C2 care are proprietatea ca pentru orice (x1, . . . , xn) ∈D avem:
n∑
i=1
n∑
j=1
aij(x1, . . . , xn) · ∂2u
∂xi∂xj(x1, . . . , xn)+
+
n∑
i=1
bi(x1, . . . , xn) · ∂u∂xi
(x1, . . . , xn)+
178

Clasificarea ecuatiilor cu derivate partiale de ordinul al doilea liniare 179
+c(x1, . . . , xn) · u(x1, . . . , xn) + f(x1, . . . , xn) = 0.
Fie T : Ω → Ω′ un difeomorfism de clasa C2 de componenteξk = ξk(x1, . . . , xn), k = 1, n si u = u(x1, . . . , xn) o solutie a ecuatiei (6.1).Consideram functia v = u T−1 si din derivarea functiilor compuse obtinem:
∂u
∂xi=
n∑
k=1
∂v
∂ξk· ∂ξk∂xi
∂2u
∂xi∂xj=
n∑
k=1
n∑
l=1
∂2v
∂ξk∂ξl· ∂ξk∂xi
· ∂ξl∂xj
+
n∑
k=1
∂v
∂ξk· ∂2ξk∂xi∂xj
.
Inlocuind derivatele ın ecuatia (6.1) obtinem:
n∑
k=1
n∑
l=1
akl ·∂2v
∂xk∂xl
+n∑
k=1
bk ·∂v
∂ξk+ c · v + f = 0 (6.2)
unde:
akl =
n∑
i=1
n∑
j=1
aij ·∂ξk∂xi
· ∂ξl∂xj
b =
n∑
i=1
bi ·∂ξk∂xi
+
n∑
i=1
n∑
j=1
aij ·∂2ξk∂xi∂xj
.
Ecuatia (6.2) este echivalenta cu ecuatia (6.1), solutiile u ale ecuatiei (6.1)obtinandu-se din solutiile v ale ecuatiei (6.2) cu formula u = v T .Pe de alta parte ıntr-un punct oarecare, fixat (x0
1, . . . , x0n) ∈ Ω putem con-
sidera forma patratican∑
i=1
n∑
j=1
a0ij · yi · yj
unde a0ij = aij(x
01, . . . , x
0n). Prin schimbarea de variabile
yi =n∑
k=1
∂ξk∂xk
· ηk
forma patratica considerata se transforma ın forma patratica:
n∑
k=1
n∑
l=1
(n∑
i=1
n∑
j=1
a0ij ·
∂ξk∂xi
· ∂ξl∂xj
)ηkηl =
n∑
k=1
n∑
l=1
akl · ηkηl.

180 CAPITOLUL 6
Prin urmare, coeficientii derivatelor partiale de ordinul al doilea se schimbala fel cu coeficientii formei patratice sub actiunea transformarii liniare:
yj =
n∑
k=1
∂ξk∂xi
· ηk.
Se stie ca, prin alegerea unei transformari liniare adecvate, forma patratica seaduce la forma canonica (adica matricea a0
ij poate fi adusa la forma diagonala:|a0
ii| = 1 sau 0 si, a0ij = 0 daca i 6= j). Aceasta ınseamna ca alegand ın mod
adecvat transformarea ξk = ξk(x1, ..., xn), k = 1, n, coeficientii derivatelor
partiale∂2v
∂ξ2k
ın punctul ξk = ξk(x01, ..., x
0n), k = 1, n vor fi egali cu +1,−1 sau
0, iar coeficientii derivatelor partiale∂2v
∂ξk∂ξlvor fi nuli.
Conform legii inertiei, numarul coeficientilor a0ii pozitivi, negativi sau nuli
nu depinde de transformarea liniara care aduce forma patratica la formacanonica. Aceasta permite sa dam urmatoarea definitie:
Definitia 6.1.3
i) Zicem ca ecuatia (6.1) este eliptica ın punctul (x01, . . . , x
0n) daca toti
cei n coeficienti a0ii sunt de acelasi semn.
ii) Zicem ca ecuatia (6.1) este hiperbolica ın punctul (x01, . . . , x
0n) daca
(n− 1) coeficienti a0ii au acelasi semn si unul din coeficienti are
semn contrar.iii) Zicem ca ecuatia (6.1) este ultra-hiperbolica ın punctul (x0
1, . . . , x0n)
daca printre coeficientii a0ii exista m coeficienti de un semn si n−m
coeficienti de semn contrar.iv) Zicem ca ecuatia (6.1) este parabolica daca cel putin unul din coefi-cientii a0
ii este nul.
Observatia 6.1.1 In acord cu definitia anterioara, ecuatia (6.1) are unadintre urmatoarele forme standard:
i) Ecuatie de tip eliptic ın (x01, . . . , x
0n):
∂2v
∂ξ21
+∂2v
∂ξ22
+ . . .+∂2v
∂ξn+ Φ = 0; (6.3)

Clasificarea ecuatiilor cu derivate partiale de ordinul al doilea liniare 181
ii) Ecuatie de tip hiperbolic ın (x01, . . . , x
0n):
∂2v
∂ξ1=
n∑
i=2
∂2v
∂ξ2i
+ Φ; (6.4)
iii) Ecuatie de tip ultra-hiperbolic ın (x01, . . . , x
0n):
m∑
i=1
∂2v
∂ξ2i
=
n∑
i=m+1
∂2v
∂ξ2i
+ Φ; (6.5)
iii) Ecuatie de tip parabolic:
n−m∑
i=1
(±∂
2v
∂ξ2i
)+ Φ = 0, (m > 0). (6.6)
Tipul ecuatiei (6.1) ın (x01, . . . , x
0n) se determina prin aducerea formei patratice:
n∑
i=1
n∑
j=1
a0ij yi yj
la forma canonica. Ecuatia poate fi adusa la una din formele standard prezen-tate alegand transformarea ξk = ξk(x1, . . . , ξn), k = 1, n astfel ıncat transfor-marea liniara:
yi =n∑
k=1
∂ξk∂xi
(x01, . . . , x
in) · ηk
sa aduca forma patratica la forma canonica.Sa examinam ın continuare problema posibilitatii aducerii ecuatiei (6.1)
la ”forma canonica” (una din formele prezentate) ıntr-o vecinatate a unuipunct (x1, . . . , xn), ın conditiile ın care ın toate punctele acestei vecinatatiecuatia apartine aceluiasi tip.Pentru a aduce ecuatia (6.1) la forma canonica ıntr-un anumit domeniu artrebui, ın primul rand, sa impunem functiilor ξk(x1 . . . , xn), k = 1, n conditiile
diferentiale akl = 0 pentru k 6= l. Numarul acestor conditii esten(n− 1)
2si este mai mic decat n (n reprezinta numarul functiilor ξk, k = 1, n) dacan < 3. De aceea pentru n > 3 ecuatia (6.1) nu poate fi adusa la forma

182 CAPITOLUL 6
canonica ın vecinatatea unui punct (x1, . . . , xn).Pentru n = 3 elementele nediagonale ar putea fi anulate ın general, ınsa ele-mentele diagonale ar putea fi diferite de ±1,0. Deci, nici ın acest caz, ecuatia(6.1) nu poate fi adusa la forma canonica ın vecinatatea unui punct.Doar pentru n = 2, putem anula unicul coeficient nediagonal si satisfaceconditia de egalitate a celor doi coeficienti diagonali. Aceasta ınseamnaca doar ın cazul n = 2 putem aduce ecuatia cu derivate partiale la formacanonica pe o vecinatate.
Exercitii
1. Aduceti la forma canonica ecuatia:
a11 ·∂2u
∂x2+ 2a12 ·
∂2u
∂x∂y+ a22 ·
∂2u
∂y2+ b1 ·
∂u
∂x+ b2 ·
∂u
∂y+ c · u+ f(x, y) = 0
unde aij , bi, c sunt constante.
R: Scriind ecuatia caracteristica asociata:
a11
(dy
dx
)2
− 2a12
(dy
dx
)+ a22 = 0
se obtine discriminantul: ∆ = (a12)2 − a11 · a22.
- daca ∆ > 0 (cazul ecuatiei hiperbolice), atunci ecuatia caracteristicaare doua radacini reale:
dy
dx=a12 +
√(a12)2 − a11 · a22
a11
dy
dx=a12 −
√(a12)2 − a11 · a22
a11
Se rezolva aceste ecuatii diferentiale ordinare si se obtinef(x, y) = c1, respectiv g(x, y) = c2.Schimbarea de variabile care ne va duce la forma canonica va fi:
ξ(x, y) = f(x, y)η(x, y) = g(x, y).

Clasificarea ecuatiilor cu derivate partiale de ordinul al doilea liniare 183
- daca ∆ = 0 (cazul ecuatiei parabolice), atunci ecuatia caracteristica aredoua radacini reale egale:
dy
dx=a12
a11.
Rezolvand aceasta ecuatie diferentiala ordinara se obtinef(x, y) = c1 care ne va conduce la schimbarea de variabilaξ(x, y) = f(x, y). Pentru η(x, y) se alege convenabil o functie g(x, y)astfel ıncat sa fie ındeplinite proprietatile schimbarii de variabile, deexemplu:
ξ(x, y) = f(x, y)η(x, y) = x
ξ(x, y) = f(x, y)η(x, y) = y.
- daca ∆ < 0 (cazul ecuatiei eliptice), atunci ecuatia caracteristica aredoua radacini complexe:
dy
dx=a12
a11+ i√a11 · a22 − (a12)2
dy
dx=a12
a11
− i√a11 · a22 − (a12)2
Rezolvand aceste ecuatii diferentiale ordinare se obtinα(x, y) ± iβ(x, y) = τ care ne va conduce la schimbarea de variabila:
ξ(x, y) = α(x, y)η(x, y) = β(x, y).
2. Sa se gaseasca domeniile de elipticitate, hiperbolicitate si parabolici-tate ale ecuatiei:
y · ∂2u
∂x2+ x · ∂
2u
∂y2= 0
R: Deoarece ∆ = b2 − ac = −xy avem ca:
- ecuatia este de tip hiperbolic (∆ > 0) ın cadranele II si IV;
- ecuatia este de tip eliptic (∆ < 0) ın cadranele I si III.

184 CAPITOLUL 6
3. Sa se aduca la forma canonica ecuatiile:
a)∂2u
∂x2+ 2 · ∂2u
∂x∂y+∂2u
∂y2= 0
R: Ecuatia este de tip parabolic (∆ = 0); forma canonica este:∂2v
∂η2= 0;
b) x2 · ∂2u
∂x2− 4 · y2 · ∂u
∂y2= 0, x, y > 0
R: Ecuatia este de tip hiperbolic (∆ > 0); forma canonica este:∂2v
∂ξ∂η− 3
8· ∂v∂ξ
− 1
8· ∂v∂η
= 0;
c) x2∂2u
∂x2+ 4 · y2 · ∂
2u
∂y2= 0, x, y > 0
R: Ecuatia este de tip eliptic (∆ < 0); forma canonica este:∂2v
∂ξ2+∂2v
∂η2− ∂v
∂ξ+
1
2· ∂v∂η
= 0;
Formulele lui Green si formule de reprezentare ın doua dimensiuni 185
6.2 Formulele lui Green si formule
de reprezentare ın doua dimensiuni
In acest paragraf prezentam cateva rezultate de calcul diferential si integralpentru functii de doua variabile, care intervin frecvent ın rezolvarea E.D.Pın doua dimensiuni.
Teorema 6.2.1 (legatura dintre integrala dubla pe un domeniu marginit ınIR2 si integrala curbilinie pe frontiera acestuia)Daca Ω este un domeniu marginit ın IR2 cu frontiera ∂Ω neteda (partialneteda), iar functiile P,Q : Ω → IR1 sunt continue pe Ω si de clasa C1 ın Ω,atunci are loc urmatoarea egalitate:
∫∫
Ω
(∂P
∂x1
+∂Q
∂x2
)dx1dx2 =
∫
∂Ω
(P · cosα1 +Q · cosα2)ds (6.7)
ın care: αi este unghiul dintre versorul n al normalei exterioare la ∂Ω si axaei, iar ds este masura elementului de arc pe curba ∂Ω.
Demonstratie: Aceasta teorema este obiectul cursului de analiza matema-tica din anul I. Aici redam doar cıteva idei din demonstratia acestei teoreme.Mai ıntai, reamintim ca egalitatea (6.7) se obtine prin adunarea egalitatilor:
∫∫
Ω
∂P
∂x1
dx1dx2 =
∫
∂Ω
P · cosα1 · ds
(6.8)∫∫
Ω
∂Q
∂x2dx1dx2 =
∫
∂Ω
Q · cosα2 · ds
si prin urmare demonstratia egalitatii (6.7) revine la demonstratia egalitatilor(6.8).
Prima dintre egalitatile (6.8) se obtine calculand integrala dubla ca ointegrala iterata si interpretand apoi cele obtinute ca o integrala curbilinie.Astfel avem:
∫∫
Ω
∂P
∂x1dx1dx2 =
∫ d
c
(∫ x+
1(x2)
x−
1(x2)
∂P
∂x1dx1
)dx2 =
=
∫ d
c
[P (x+
1 (x2), x2) − P (x−1 (x2), x2)]dx2

186 CAPITOLUL 6
ın care intervin curbele:
Γ+ :
x1 = x+
1 (x2)x2 = x2
Γ− :
x1 = x−1 (x2)x2 = x2
Figura 29. Ilustrarea elementelor ce intervin in formula lui Green
Pe figura se vede ca avem
cosα1 = cos ∢(τ, Ox2) =1√
1 +
(dx+
1
dx2
)2
si rezulta astfel ın continuare:
∫ d
c
[P (x+
1 (x2), x2) − P (x−1 (x2), x2)]dx2 =
=
∫ d
c
P (x+1 (x2), x2) · cosα1 ·
√
1 +
(dx+
1
dx2
)2
dx2+

Formulele lui Green si formule de reprezentare ın doua dimensiuni 187
+
∫ d
c
P (x−1 (x2), x2) · cosα1 ·
√
1 +
(dx−1dx2
)2
dx2 =
∫
∂Ω
P cosα1ds
A doua egalitate din (6.8) se obtine asemanator.
Teorema 6.2.2 (de integrare prin parti)Daca Ω este un domeniu marginit ın IR2 si frontiera ∂Ω a lui Ω este neteda(partial neteda), iar P,Q : Ω → IR1 sunt functii continue pe Ω si de clasa C1
ın Ω atunci au loc egalitatile:∫∫
Ω
∂P
∂xi·Qdx1dx2 =
∫
∂Ω
P ·Q · cosαids−∫∫
Ω
P∂Q
∂xidx1dx2, i = 1, 2 (6.9)
Demonstratie: Pe de o parte avem:
∫∫
Ω
∂
∂xi
· (P ·Q)dx1dx2 =
∫∫
Ω
∂P
∂xi
·Qdx1dx2 +
∫∫
Ω
∂Q
∂xi
· Pdx1dx2,
iar pe de alta parte avem:∫∫
Ω
∂
∂xi· (P ·Q)dx1dx2 =
∫
∂Ω
P ·Q · cosαi · ds.
Prin egalare rezulta egalitatea:∫∫
Ω
∂P
∂xi·Qdx1dx2 +
∫∫
Ω
∂Q
∂xi· Pdx1dx2 =
∫
∂Ω
P ·Q cosαi · ds
de unde rezulta (6.9).
Teorema 6.2.3 (prima formula a lui Green)Daca Ω este un domeniu marginit ın IR2 si frontiera ∂Ω a lui Ω este neteda(partial neteda), iar functiile P,Q : Ω → IR1 sunt de clasa C1 pe Ω si declasa C2 ın Ω atunci are loc urmatoarea egalitate:
∫∫
Ω
P∆Qdx1dx2 =
∫
∂Ω
P · ∂Q∂n
ds−∫∫
Ω
∇P · ∇Qdx1dx2 (6.10)
Demonstratie: In formula (6.10): ∆Q reprezinta Laplacianul functiei Qadica:
∆Q =∂2Q
∂x21
+∂2Q
∂x22
,

188 CAPITOLUL 6
iar∂Q
∂neste derivata normala definita pe ∂Ω prin:
∂Q
∂n=∂Q
∂x1
· n1 +∂Q
∂x2
· n2 =
=∂Q
∂x1
· cosα1 +∂Q
∂x2
· cosα2
cosαi =< n, ei >= ni, i = 1, 2; ∇P si ∇Q sunt functiile vectoriale (gradientiifunctiilor P si Q) definite prin:
∇P =∂P
∂x1· e1 +
∂P
∂x2· e2
∇Q =∂Q
∂x1· e1 +
∂Q
∂x2· e2.
Pentru demonstratie se calculeaza membrul stang al egalitatii (6.10) tinandseama de formula de integrare prin parti (6.9) si se obtine:
∫∫
Ω
P · ∆Qdx1dx2 =
∫∫
Ω
P
[∂
∂x1
(∂Q
∂x1
)+
∂
∂x2
(∂Q
∂x2
)]dx1dx2 =
=
∫
∂Ω
P · cosα1 ·∂Q
∂x1ds−
∫∫
Ω
∂P
∂x1· ∂Q∂x1
dx1dx2 +
+
∫
∂Ω
P · cosα2 ·∂Q
∂x2ds−
∫∫
Ω
∂P
∂x2· ∂Q∂x2
dx1dx2 =
=
∫
∂Ω
P ·[∂Q
∂x1· cosα1 +
∂Q
∂x2· cosα2
]ds−
−∫∫
Ω
(∂P
∂x1
· ∂Q∂x1
dx1dx2 +∂P
∂x2
· ∂Q∂x2
)dx1dx2 =
=
∫
∂Ω
P ·[∂Q
∂x1· cosα1 +
∂Q
∂x2· cosα2
]ds−
−∫∫
Ω
∇P · ∇Qdx1dx2 =

Formulele lui Green si formule de reprezentare ın doua dimensiuni 189
=
∫
∂Ω
P · ∂Q∂n
ds−∫∫
Ω
∇P · ∇Qdx1dx2.
Teorema 6.2.4 (cea de-a doua formula a lui Green)Daca Ω este un domeniu marginit ın IR2 cu frontiera ∂Ω neteda (partialneteda), iar functiile P,Q : Ω → IR1 sunt de clasa C1 pe Ω si de clasa C2 ınΩ atunci are loc urmatoarea egalitate:
∫∫
Ω
(P∆Q−Q∆P )dx1dx2 =
∫
∂Ω
(P · ∂Q
∂n−Q · ∂P
∂n
)ds. (6.11)
Demonstratie: Egalitatea (6.11) se obtine scriind egalitatea (6.10) pentrufunctiile P · ∇Q si Q · ∇P dupa care se face diferenta acestora.
Teorema 6.2.5 (de reprezentare a unei functii de doua variabile)Daca Ω este un domeniu marginit ın IR2 cu frontiera ∂Ω neteda (partialneteda) si functia u : Ω → IR1 este de clasa C1 pe Ω si de clasa C2 ın Ωatunci pentru orice X = (x1, x2) ∈ Ω are loc urmatoarea egalitate:
u(X) = − 1
2π
∫∫
Ω
ln1
‖X − Y ‖ · ∆u(Y )dy1dy2 +
+1
2π
∫
∂Ω
ln1
‖X − Y ‖ · ∂u∂nY
(Y )dsY −
− 1
2π
∫
∂Ω
u(Y ) · ∂
∂nY
(ln
1
‖X − Y ‖
)dsY . (6.12)
Demonstratie: Functia
E(X) = − 1
2πln
1
‖X‖
definita pentru orice X ∈ IR2, X 6= 0 este de clasa C2 pe IR2 \ 0 si areproprietatea ∆E = 0. Pentru X ∈ IR2, X-fixat consideram functia:
E(X − Y ) = − 1
2πln
1
‖X − Y ‖
definita pentru orice Y ∈ IR2 \ X. Aceasta functie de Y este de clasa C2
si are proprietatea ∆YE(X − Y ) = 0. De asemenea, pentru orice Y ∈ IR2,

190 CAPITOLUL 6
Y -fixat functia E(X − Y ) = − 1
2πln
1
‖X − Y ‖ definita pentru orice X ∈IR2, X 6= Y este de clasa C2 si verifica ∆XE(X − Y ) = 0.Consideram X ∈ Ω, X-fixat si ε > 0 astfel ca, pentru orice Y cu ‖X−Y ‖ ≤ ε,sa avem Y ∈ Ω. Notam cu B(X, ε) discul centrat ın X de raza ε:
B(X, ε) = Y : ‖X − Y ‖ ≤ ε
si domeniul Ωε = Ω −B(X, ε). Consideram functiile
Y 7−→ u(Y ) si Y 7−→ − 1
2πln
1
‖X − Y ‖ = E(X − Y ).
Pe domeniul Ωε, ambele functii sunt de clasa C2, iar pe Ωε sunt de clasa C1.Scriem cea de-a doua formula a lui Green pentru aceste functii si obtinem:
− 1
2π
∫∫
Ωε
ln1
‖X − Y ‖ · (∆u)(Y )dy1dy2 =
= − 1
2π
∫
∂Ωε
ln1
‖X − Y ‖ · ∂u
∂nY(Y )dsY +
1
2π
∫
∂Ωε
u(Y ) · ∂
∂nY
(ln
1
‖X − Y ‖
)· dsY .
Frontiera ∂Ωε a multimii Ωε are doua parti: ∂Ωε = ∂Ω ∪ Sε unde Sε =Y : ‖Y −X‖ = ε, astfel ca integralele din membru drept al acestei egalitatise pot scrie dupa cum urmeaza:
− 1
2π
∫
∂Ωε
ln1
‖X − Y ‖ · ∂u
∂nY(Y )dsY =
= − 1
2π
∫
∂Ω
ln1
‖X − Y ‖ · ∂u
∂nYdsY − 1
2π
∫
Sε
ln1
‖X − Y ‖ · ∂u∂nY
dsY =
= − 1
2π
∫
∂Ω
ln1
‖X − Y ‖ · ∂u
∂nY(Y )dsY +
1
2πln ε · 2πε · ∂n
∂nY(Y ∗).
Formulele lui Green si formule de reprezentare ın doua dimensiuni 191
1
2π
∫
∂Ωε
u(Y ) · ∂
∂nY
(ln
1
‖X − Y ‖
)dsY =
=1
2π
∫
∂Ω
u(Y ) · ∂
∂nY
(ln
1
‖X − Y ‖
)dsY +
+1
2π
∫
Sε
u(Y ) · ∂
∂nY
(ln
1
‖X − Y ‖
)dsY =
=1
2π
∫
∂Ω
u(Y ) · ∂
∂nY
(ln
1
‖X − Y ‖
)· dsY +
+1
2π
∫
Sε
u(Y ) ·[x1 − y1
‖X − Y ‖2· cosα1 +
x2 − y2
‖X − Y ‖2· cosα2
]dsY =
=1
2π
∫
∂Ω
u(Y ) · ∂
∂nY
(ln
1
‖X − Y ‖
)· dsY +
+1
2π
∫
Sε
u(Y ) ·[(x1 − y1)
2 + (x2 − y2)2
‖X − Y ‖3
]dsY =
=1
2π
∫
∂Ω
u(Y ) · ∂∂n
(ln
1
‖X − Y ‖
)dsY +
1
2π
∫
Sε
u(Y ) · 1
‖X − Y ‖dsY =
=1
2π
∫
∂Ω
u(Y ) · ∂
∂nY
(ln
1
‖X − Y ‖
)dsY +
1
2πε
∫
Sε
u(Y )dsY
Pentru ε 7−→ 0 rezulta:
limε→0
− 1
2π
∫
∂Ωε
ln1
‖X − Y ‖ · ∂u
∂nYu(Y )dsY =
= − 1
2π
∫
∂Ω
ln1
‖X − Y ‖ · ∂u
∂nYu(Y )dsY .

192 CAPITOLUL 6
limε→0
1
2π
∫
∂Ωε
u(Y ) · ∂
∂nY
(ln
1
‖X − Y ‖
)dsY =
=1
2π
∫
∂Ω
u(Y ) · ∂
∂nY
(ln
1
‖X − Y ‖
)dsY + u(X).
Rezulta de aici ca avem:
− 1
2π
∫∫
Ω
ln1
‖X − Y ‖ · (∆u)(Y )dy1dy2 =
= − 1
2π
∫
∂Ω
ln1
‖X − Y ‖ · ∂u
∂nY(Y )dsY +
1
2π
∫
∂Ω
u(Y ) · ∂
∂nY
(ln
1
‖X − Y ‖
)dsY + u(X),
sau
u(X) = − 1
2π
∫∫
Ω
ln1
‖X − Y ‖ · (∆u)(Y )dy1dy2+
+1
2π
∫
∂Ω
ln1
‖X − Y ‖ · ∂u
∂nY
(Y )dsY −
− 1
2π
∫
∂Ω
u(Y ) · ∂
∂nY
(ln
1
‖X − Y ‖
)dsY
Comentariu: Aceasta formula de reprezentare permite determinarea functieiu ın toate punctele lui Ω cunoscand urmatoarele elemente: Laplacianul
functiei u pe Ω, valorile derivatei normale∂u
∂npe frontiera ∂Ω si valorile
functiei u pe frontiera ∂Ω.Vom arata ın continuare importanta acestei formule de reprezentare pen-
tru cazul functiilor armonice.

Formulele lui Green si formule de reprezentare ın doua dimensiuni 193
Definitia 6.2.1 Zicem ca o functie u : Ω → IR1 este armonica ın Ω dacafunctia u este de clasa C2 si ∆u = 0, (∀)(x1, x2) ∈ Ω unde ∆u reprezintaLaplacianul functiei u:
∆u =∂2u
∂x21
+∂2u
∂x22
.
Observatia 6.2.1 In conditiile din teorema de reprezentare (6.2.5) dacafunctia u este armonica ın Ω si de clasa C1 pe Ω atunci avem:
u(X) =1
2π
∫
∂Ω
ln1
‖X − Y ‖ · ∂u
∂nY(Y )dsY −
− 1
2π
∫
∂Ω
u(Y ) · ∂
∂nY
(ln
1
‖X − Y ‖
)dsY
Teorema 6.2.6 (de reprezentare a functiilor armonice)Daca u : Ω ⊂ IR2 → IR1 este o functie armonica pe domeniul Ω atunci(∀)X ∈ Ω si (∀)r > 0 pentru care discul:
B(X, r) = Y : ‖Y −X‖ ≤ r
este inclus ın Ω, are loc egalitatea:
u(X) =1
2πr
∫
∂B(X,r)
u(Y )dsY (6.13)
Demonstratie: Scriind formula de reprezentare (6.12) pentru functia ar-monica u pe B(X, r) se obtine egalitatea:
u(X) =1
2π
∫
∂B(X,r)
ln1
r· ∂u∂nY
(Y )dsY +1
2π
∫
∂B(X,r)
u(Y ) · 1
rdsY
sau
u(X) =1
2πr
∫
∂B(X,r)
u(Y )dsY +1
2π· ln 1
r
∫
∂B(X,r)
∂u
∂nY(Y )dsY .
Aratam ın continuare ca∫
∂B(X,r)
∂u
∂nY(Y )dsY = 0.
194 CAPITOLUL 6
Pentru aceasta, consideram pe discul B(X, r) functiile P ≡ 1 si Q = u siaplicam prima formula a lui Green:∫∫
B(X,r)
P · ∆Qdy1dy2 =
∫
∂B(X,r)
P · ∂Q∂nY
dsY −∫
B(X,r)
∇P · ∇Qdy1dy2
de unde se obtine:
0 =
∫
∂B(X,r)
P · ∂Q∂nY
dsY =
∫
∂B(X,r)
∂u
∂nY
dsY .
Observatia 6.2.2 Din demonstratie rezulta ca integrala derivatei normalea unei functii armonice pe un cerc este zero:
∫
∂B(X,r)
∂u
∂nY
(Y )dsY = 0.
Acest rezultat se poate generaliza.
Consecinta 6.2.1 Daca u este o functie armonica de clasa C2 pe Ω si estede clasa C1 pe Ω, atunci are loc egalitatea:
∫
∂Ω
∂u
∂nY
(Y )dsY = 0.
Demonstratie: Pentru a demonstra aceasta egalitate se aplica prima for-mula a lui Green ın cazul functiilor P ≡ 1 si Q = u:
∫∫
Ω
P · ∆Qdx1dx2 =
∫
∂Ω
P · ∂Q∂nY
dsY −∫∫
Ω
∇P · ∇Qdx1dx2
adica
0=
∫∫
Ω
1 · ∆udx1dx2 =
∫
∂Ω
1 · ∂u
∂nYdsY −
∫∫
Ω
∇1 · ∇udx1dx2 =
∫
∂Ω
∂u
∂nYdsY .
O alta proprietate importanta a functiilor armonice se refera la localizareapunctelor ın care aceste functii ısi ating extremele:
Teorema 6.2.7 (teorema de extrem a functiilor armonice)Daca Ω ∈ IR2 este un domeniu marginit cu frontiera ∂Ω neteda si functiaarmonica u : Ω → IR1 este de clasa C1 pe Ω, atunci u este constanta pe Ωsau ısi atinge extremele pe frontiera ∂Ω.

Formulele lui Green si formule de reprezentare ın doua dimensiuni 195
Demonstratie: Presupunem ca functia u nu este constanta pe Ω si dorimsa aratam ca u ısi atinge extremele pe ∂Ω. Rationam prin reducere la absurdsi admitem ca, exista X0 ∈ Ω astfel ıncat oricare ar fi X ∈ Ω avemu(X) ≤ u(X0).Consideram r0 > 0 astfel ıncat
B(X0, r0) = Y : ‖Y −X0‖ ≤ r0 ⊂ Ω
si aratam ca u este constant egala cu u(X0) pe B(X0, r0).Daca u nu ar fi constant egala cu u(X0) pe B(X0, r0) atunci ar existaX1 ∈ B(X0, r0) astfel ıncat u(X1) < u(X0). Pentru X1, exista r1 > 0 astfelıncat pentru orice X ∈ B(X1, r1) avem:
u(X) <1
2
[u(X0) + u(X1)
].
Putem admite ca r1 < minr0 − ‖X1 − X0‖, ‖X1 − X0‖ si consideramnumarul ρ = ‖X1 −X0‖ > 0. Aplicam formula de reprezentare a lui u(X0)pe ∂B(X0, ρ) si gasim:
u(X0) =1
2πρ
∫
∂B(X0,ρ)
u(Y )dsY .
Frontiera ∂B(X0, ρ) se descompune astfel:
∂B(X0, ρ) = ∂B(X0, ρ) ∩B(X1, r1) ∪ B(X0, ρ) ∩ (Ω \B(X1, r1)) = σ1 ∪ σ2
si cu aceasta descompunere formula de reprezentare devine:
u(X0) =1
2πρds
∫
σ1
u(Y )dsY +1
2πρ
∫
σ2
u(Y )dsY <
<1
2πρ· 1
2
[u(X0) + u(X1)
]·∫
σ1
dsY +1
2πρ· u(X0) ·
∫
σ2
dsY <
<1
2πρ· u(X0) · 2πρ = u(X0) absurd.
Rezulta ın acest fel ca functia u este constant egala cu u(X0) pe B(X0, r).Pentru a arata ın continuare ca pentru orice X ∈ Ω avem u(X) = u(X0) fie

196 CAPITOLUL 6
X∗ ∈ Ω oarecare, X∗ fixat si P o linie poligonala continuta ın Ω care leagapunctele X0 si X∗. Fie de asemenea un sens de parcurs pe linia poligonalaP de la X0 la X∗. Multimile P si ∂Ω sunt compacte si nu au nici un punctcomun. Prin urmare exista r > 0 astfel ıncat pentru orice X ∈ P disculınchis: B(X, r) = Y : ‖Y − X‖ ≤ r0 este inclus ın Ω; B(X, r) ⊂ Ω. FieX2 punctul de intersectie dintre linia poligonala P si frontiera bilei B(X0, r0)primul ıntalnit pe directia de parcurs de la X0 la X∗. In X2 avemu(X2) = u(X0) si rezulta de aici ca pentru orice X ∈ B(X2, r) avemu(X) = u(X0). Astfel se obtine egalitatea u(X) = u(X0) pentru oriceX ∈ B(X0, r0) ∪B(X2, r).
In continuare se considera punctul de intersectie X3 dintre P si ∂B(X2, r)primul ıntalnit pe directia de parcurs X2, X∗. In X3 avem u(X3) = u(X0)si rezulta u(X) = u(X0) pentru orice X ∈ B(X3, r). In acest fel, dupa unnumar finit de pasi se ajunge la punctul X∗ capatul liniei poligonale P si laegalitatea u(X∗) = u(X0). Dar aceasta ınseamna ca functia u este constantape Ω ceea ce este absurd.S-a demonstrat ın acest fel ca daca functia armonica u pe Ω ısi atinge maximulıntr-un punct X0 ∈ Ω, atunci u este constanta pe Ω.Prin urmare: daca o functie armonica nu este constanta pe Ω, atunci ısiatinge extremele pe ∂Ω.
Consecinta 6.2.2 Daca functia u este armonica pe Ω si u/∂Ω = 0 atunciu ≡ 0.
Consecinta 6.2.3 Exista cel mult o functie u de clasa C2 ın Ω si de clasaC1 pe Ω care verifica:
∆u = Fu/∂Ω = f.
unde F si f sunt functii date: F : Ω → IR1 continua pe Ω, iarf : ∂Ω → IR1 continua pe ∂Ω.
Demonstratie: Se rationeaza prin reducere la absurd.

Formulele lui Green si formule de reprezentare ın dimensiunea n ≥ 3 197
6.3 Formulele lui Green si formule de
reprezentare ın dimensiunea n ≥ 3
In acest paragraf prezentam cateva rezultate de calcul diferential si de calculintegral pentru functii de n variabile (n ≥ 3), care intervin ın rezolvareaecuatiilor cu derivate partiale ın dimensiunea n.
Teorema 6.3.1 (de legatura ıntre integrala pe un domeniu marginit si inte-grala pe frontiera acestuia)Daca Ω ⊂ IRn este un domeniu marginit cu frontiera ∂Ω neteda (partialneteda) si f1, f2, ..., fn sunt n functii f1, f2, ..., fn : Ω → IR1 continue pe Ωsi de clasa C1 pe Ω, atunci are loc egalitatea:
∫
Ω
(n∑
i=1
∂fi
∂xi
)dx1 · · · dxn =
∫
∂Ω
n∑
i=1
fi · cos(n, ei)dS. (6.14)
Demonstratie: Semnificatia simbolurilor din formula (6.14) este aceeasi casi ın cazul n = 2, iar demonstratia teoremei se face ın mod analog.
Teorema 6.3.2 (de integrare prin parti)Daca Ω ⊂ IRn este un domeniu marginit cu frontiera ∂Ω neteda (partialneteda) si f, g sunt doua functii f, g : Ω → IR1, continue pe Ω si de clasa C1
pe Ω, atunci are loc egalitatea:
∫
Ω
∂f
∂xi
·g dx1 · · · dxn =
∫
∂Ω
f ·g ·cos(n, ei)dS −∫
Ω
f · ∂g∂xi
dx1 · · · dxn (6.15)
Demonstratie: Analoaga cu cea din cazul n = 2.
Teorema 6.3.3 (prima formula a lui Green)Daca Ω ⊂ IRn este un domeniu marginit cu frontiera ∂Ω neteda (partialneteda) si f, g sunt doua functii f, g : Ω → IR1, de clasa C1 pe Ω si de clasaC2 ın Ω, atunci are loc egalitatea:
∫
Ω
f ·∆g dx1 · · · dxn =
∫
∂Ω
f · ∂g∂n
dS −∫
Ω
∇f ·∇g dx1 · · · dxn (6.16)

198 CAPITOLUL 6
Demonstratie: Simbolurile din formula (6.16) au urmatoarele semnificatii:
∆g =n∑
i=1
∂2g
∂x2i
,∂g
∂n=
n∑
i=1
∂g
∂xicos(n, ei), ∇f =
n∑
i=1
∂f
∂xiei
Teorema se demonstreaza ca si ın cazul n = 2.
Teorema 6.3.4 (a doua formula a lui Green)Daca Ω ⊂ IRn este un domeniu marginit cu frontiera ∂Ω neteda (partialneteda) si f, g sunt doua functii f, g : Ω → IR1, de clasa C1 pe Ω si de clasaC2 ın Ω, atunci are loc egalitatea:
∫
Ω
(f ·∆g − g ·∆f) dx1 · · · dxn =
∫
∂Ω
(f · ∂g∂n
− g ·∂f∂n
)dS (6.17)
Demonstratie: Teorema se demonstreaza ca si ın cazul n = 2.
Teorema 6.3.5 (de reprezentare a unei functii de n variabile)Daca Ω ⊂ IRn este un domeniu marginit cu frontiera ∂Ω neteda (partialneteda) si u : Ω → IR1 este o functie de clasa C1 pe Ω si de clasa C2 ın Ω,atunci are loc urmatoarea formula de reprezentare:
u(X) = − 1
(n− 2)σn
∫
Ω
1
‖X − Y ‖n−2∆u(Y ) dy1 · · · dyn +
+1
(n− 2)σn
∫
∂Ω
1
‖X − Y ‖n−2
∂u
∂nY(Y ) dSY − (6.18)
− 1
(n− 2)σn
∫
∂Ω
u(Y )∂
∂nY
(1
‖X − Y ‖n−2
)dSY
unde σn reprezinta aria suprafetei bilei
B(0, 1) = Y = (y1, . . . , yn) ∈ IRn| ‖Y ‖ ≤ 1
iar indicele Y la∂
∂nYarata ca se calculeaza derivata normala a functiei
Y 7→ 1
‖X − Y ‖n−2; analog dSY .
Demonstratie: Se face analog cu cazul n = 2.

Formulele lui Green si formule de reprezentare ın dimensiunea n ≥ 3 199
Comentariu Formula (6.18) permite constructia functiei u din valorile
Laplacianului ∆u al functiei ın Ω, valorile derivatei normale∂u
∂na lui u pe
∂Ω si valorile lui u pe ∂Ω.
Vom arata ce devine aceasta formula de reprezentare ın cazul functiilorarmonice.
Definitia 6.3.1 Zicem ca functia u : Ω ⊂ IRn → IR1 este armonica ın Ωdaca functia este de clasa C2 ın Ω si daca
∆u =n∑
i=1
∂2u
∂x2i
= 0, (∀)(x1, . . . , xn) ∈ Ω.
Observatia 6.3.1 In conditiile din Teorema 6.3.5 (de reprezentare), dacafunctia u este armonica ın Ω, atunci avem:
u(X) =1
(n− 2)σn
[∫
∂Ω
1
‖X − Y ‖n−2
∂u
∂nY(Y ) dSY −
−∫
∂Ω
u(Y )∂
∂nY
(1
‖X − Y ‖n−2
)dSY
].
Teorema 6.3.6 (de reprezentare a functiilor armonice)Daca Ω ⊂ IRn este un domeniu si u : Ω → IR1 este o functie armonica ın Ω(∆u = 0), atunci pentru orice x ∈ Ω si orice r > 0 astfel ıncat bila ınchisaB(0, r) = Y ∈ IRn| ‖Y ‖ ≤ r este inclusa ın Ω are loc egalitatea:
u(X) =1
σn rn−2
∫
∂B(X,r)
u(Y ) dSY (6.19)
Demonstratie: Demonstratia este analoaga cu cea din cazul n = 2.
Observatia 6.3.2 Daca Ω ⊂ IRn este un domeniu marginit cu frontiera ∂Ωneteda (partial neteda) si u : Ω → IR1 este o functie de clasa C1 pe Ω si estearmonica ın Ω (∆u = 0 ın Ω), atunci:
∫
∂Ω
∂u
∂ndS = 0.

200 CAPITOLUL 6
Teorema 6.3.7 (de extrem a functiilor armonice)Daca Ω ⊂ IRn este un domeniu marginit cu frontiera ∂Ω neteda (partialneteda) si u : Ω → IR1 este o functie continua pe Ω si armonica ın Ω (∆u = 0ın Ω), atunci functia u este constanta sau ısi atinge extremele pe frontiera∂Ω.
Demonstratie: Demonstratia este analoaga cu cea din cazul n = 2.
Consecinta 6.3.1 Daca ∆u = 0 si u|∂Ω = 0 atunci u = 0.
Consecinta 6.3.2 Exista cel mult o functie u de clasa C2 ın Ω si de clasaC1 pe Ω care verifica
∆u = Fu|∂Ω = f
unde F si f sunt doua functii date, F : Ω → IR1 este continua pe Ω sif : ∂Ω → IR1 este continua pe ∂Ω.

Probleme la limita pentru ecuatia lui Poisson 201
6.4 Probleme la limita pentru
ecuatia lui Poisson
Fie Ω ⊂ IRn un domeniu marginit cu frontiera ∂Ω neteda (partial neteda) sif o functie f : Ω → IR1 de clasa C1 pe Ω.
Definitia 6.4.1 Ecuatia lui Poisson este o relatie de dependenta functionalade forma
−∆u = f(X), (∀)X = (x1, . . . , xn) ∈ Ω (6.20)
dintre o functie necunoscuta u : Ω → IR1 si functia data f de clasa C1 pe Ω.
In ecuatia (6.20) ∆u ınseamna
n∑
i=1
∂2u
∂x2i
(adica Laplacianul functiei u) iar
functia u : Ω → IR1 este solutie clasica daca este continua pe Ω, de clasa C2
ın Ω si satisface egalitatea:
n∑
i=1
∂2u
∂x2i
(x1, ..., xn) = f(x1, ..., xn), (∀)(x1, ..., xn) ∈ Ω.
Definitia 6.4.2 Problema Dirichlet pentru ecuatia lui Poisson este proble-ma determinarii acelor solutii ale ecuatiei (6.20) care verifica conditia lafrontiera
u|∂Ω = h (6.21)
unde h este o functie h : ∂Ω → IR1 continua pe ∂Ω considerata cunoscuta.
Problema Dirichlet pentru ecuatia lui Poisson se noteaza traditional:
−∆u = f, (∀)(x1, ..., xn) ∈ Ωu|∂Ω = h
. (6.22)
Definitia 6.4.3 Problema Neumann pentru ecuatia lui Poisson este proble-ma determinarii acelor solutii ale ecuatiei (6.20) care verifica conditia lafrontiera
∂u
∂n
∣∣∣∣∂Ω
= g (6.23)
unde g este o functie g : ∂Ω → IR1 continua pe ∂Ω considerata cunoscuta sin este versorul normalei exterioare.

202 CAPITOLUL 6
Problema Neumann pentru ecuatia lui Poisson se noteaza traditional:
−∆u = f, (∀)(x1, ..., xn) ∈ Ω∂u
∂n
∣∣∣∣∂Ω
= g. (6.24)
Teorema 6.4.1 (de unicitate a solutiei Problemei Dirichlet)Daca Problema Dirichlet (6.22) are solutie, aceasta solutie este unica.
Demonstratie: Fie u1 si u2 doua solutii ale Problemei Dirichlet (6.22).Consideram functia u = u1 − u2 pentru care avem:
∆u = 0 si u|∂Ω = 0.
Rezulta de aici, pe baza principiului de maxim a functiilor armonice, cau ≡ 0. Prin urmare u1 = u2.
Teorema 6.4.2 (de neunicitate a solutiei Problemei Neumann)Daca u este o solutie a Problemei Neumann (6.24), atunci si u + C esteo solutie a Problemei Neumann, unde C este o constanta. Daca u, v suntsolutii ale Problemei Neumann (6.24), atunci u− v = const.
Demonstratie: Fie u o solutie a problemei (6.24) si v = u + C. Intrucat
∆v = ∆u si∂v
∂n
∣∣∣∣∂Ω
=∂u
∂n
∣∣∣∣∂Ω
= g, rezulta ca v este solutie a problemei (6.24).
Daca u, v sunt solutii ale problemei (6.24) atunci w = u− v verifica:
∆w = 0 si∂w
∂n
∣∣∣∣∂Ω
= 0.
In baza formulelor de reprezentare rezulta w = const.
Teorema 6.4.3 Conditia necesara pentru ca Problema Neumann (6.24) saaiba solutie este ca functiile f si g sa verifice egalitatea:
∫
∂Ω
g(Y ) dSY +
∫
Ω
f(Y ) dY = 0. (6.25)

Probleme la limita pentru ecuatia lui Poisson 203
Demonstratie: Sa presupunem ca Problema Neumann (6.24) are o solutieu. Considerand functiile u si 1, aplicam cea de-a doua formula a lui Greenacestor functii:
∫
Ω
(∆u · 1 − u∆1) dY =
∫
∂Ω
(∂u
∂nY
− u∂1
∂nY
)dSY .
Tinand seama de egalitatile −∆u = f ,∂u
∂nY
∣∣∣∣∂Ω
= g, ∆1 = 0 si∂1
∂nY
= 0
obtinem relatia (6.25).
Din cele prezentate pana acum nu rezulta ca Problema Dirichlet (6.22)sau Problema Neumann (6.24) are solutie. In paragrafele urmatoare vomprezenta metoda functiilor Green pentru a arata ca ın anumite conditii acesteprobleme au solutie si apoi vom reprezenta aceste solutii.

204 CAPITOLUL 6
6.5 Functia Green pentru Problema
Dirichlet
Consideram un domeniu Ω ⊂ IRn marginit, cu frontiera neteda (partialneteda), functia f : Ω → IR1 de clasa C1 pe Ω si functia h : ∂Ω → IR1
continua pe ∂Ω. Aceste elemente definesc Problema Dirichlet:
−∆u = f, (∀)(x1, ..., xn) ∈ Ωu|∂Ω = h
. (6.26)
Definitia 6.5.1 Numim functie Green pentru o Problema Dirichlet o functieG de forma:
G(X, Y ) = E(X, Y ) − v(X, Y ) (6.27)
ın care
E(X, Y )=
1
2πln
1
‖X−Y ‖ , (∀)X,Y ∈ Ω, X 6=Y, n=2
1
(n−2)σn· 1
‖X−Y ‖n−2, (∀)X,Y ∈ Ω, X 6=Y, n>2
(6.28)
iar functia v(X, Y ) are urmatoarele proprietati:
a) Y 7→ v(X, Y ) este functie armonica ın Ω si continua pe Ω pentru oriceX = (x1, . . . , xn) ∈ Ω, X fixat.
b) pentru X ∈ Ω, X fixat, G(X, Y ) = 0, (∀)Y = (y1, . . . , yn) ∈ ∂Ω.
Propozitia 6.5.1 Daca exista functia Green G(X, Y ) pentru ProblemaDirichlet, atunci ea este unica.
Demonstratie: Daca G1, G2 sunt doua functii Green pentru ProblemaDirichlet, atunci pentru orice X ∈ Ω fixat,
v(X, Y ) = v1(X, Y ) − v2(X, Y )
este functie armonica ın Ω si identic nula pe ∂Ω. Rezulta v(X, Y ) = 0,(∀)Y ∈ Ω, si (∀)X ∈ Ω, fixat. Aceasta arata ca v(X, Y ) ≡ 0, adicav1(X, Y ) = v2(X, Y ).

Functia Green pentru Problema Dirichlet 205
Propozitia 6.5.2 Daca pentru orice X ∈ Ω functia Y 7→ v(X, Y ) este declasa C1 pe Ω, atunci functia Green este simetrica, adica:
G(X1, X2) = G(X2, X1), (∀)X1, X2 ∈ Ω si X1 6= X2. (6.29)
Demonstratie: Se considera functiile P (Y )=G(X1, Y) si Q(Y )=G(X2, Y) si seaplica cea de-a doua formula a lui Green pentru aceste functii pe domeniulΩε =Ω \ (B(X1,ε) ∪B(X2,ε)), unde B(Xi,ε)=X : ‖X−Xi‖<ε, i = 1, 2. Seobtine egalitatea:∫
∂B(X1,ε)
(P∂Q
∂nY
−Q ∂P
∂nY
)dSY +
∫
∂B(X2,ε)
(P∂Q
∂nY
−Q ∂P
∂nY
)dSY = 0.
Trecand la limita pentru ε → 0 ın aceasta egalitate, se obtine simetria.
Teorema 6.5.1 Daca G este functia Green pentru Problema Dirichlet (6.26)si u este solutia acestei probleme, atunci are loc egalitatea:
u(X) = −∫
Ω
G(X, Y ) · f(Y ) dY −∫
∂Ω
h(Y ) · ∂G(X, Y )
∂nY
dSY . (6.30)
Demonstratie: Scriem cea de-a doua formula a lui Green pentru functiileu(Y ) si Y 7→ v(X, Y ), precum si formula generala de reprezentare a functieiu(X) (formula (6.18)). Prin adunarea acestora rezulta (6.30).
Observatia 6.5.1 Aceasta teorema arata ca daca exista o functie Green Gpentru Problema Dirichlet (6.26) care are solutia u, atunci u se reprezinta subforma (6.30) cu ajutorul lui G. Este adevarata si afirmatia reciproca: dacaG este functia Green pentru Problema Dirichlet, atunci functia u definitacu (6.30) este solutia problemei Dirichlet (6.26). Metoda de determinarea solutiei Problemei Dirichlet pe aceasta cale se numeste metoda functieiGreen.
Exemplul 6.5.1Fie Ω = X ∈ IR3 | ‖X‖ < r si ∂Ω = X ∈ IR3 | ‖X‖ = r. SolutiaProblemei Dirichlet
−∆u = 0, (∀)X ∈ Ωu|∂Ω = h
unde h este o functie continua pe ∂Ω, este data de formula lui Poisson:
u(X) =1
4πr
∫
∂Ω
r2 − ‖X‖2
‖X − Y ‖3h(Y ) dSY (6.31)

206 CAPITOLUL 6
ıntrucat functia G(X, Y ) definita prin
G(X, Y ) =1
4π‖X − Y ‖ − r
4π‖X∗ − Y ‖ (6.32)
unde X∗ este conjugatul lui X fata de sfera ∂Ω (adica X, X∗ sunt coliniaresi ‖X‖ · ‖X∗‖ = r) este functia Green pentru aceasta Problema Dirichlet.
Observatia 6.5.2 Determinarea functiei Green pentru ProblemaDirichlet revine la determinarea functiei v = v(X, Y ) ceea ce revine, con-form definitiei functiei Green, la rezolvarea Problemei Dirichlet:
−∆Y v(X, Y ) = 0v(X, Y )|Y ∈∂Ω = E(X, Y )|Y ∈∂Ω
(6.33)
Aceasta problema este aparent mai simpla decat Problema Dirichlet (6.26)dar ın realitate ea este rezolvata pentru domenii Ω particulare, prin metodegeometrice. Din acest motiv demonstratia existentei solutiei Problemei Dirich-let (6.26) prin folosirea functiei Green se poate face doar pentru domenii Ωparticulare pentru care se stie ca exista functia Green.
Exercitii
1. Determinati solutia Problemei Dirichlet:
∂2u
∂x21
+∂2u
∂x22
+∂2u
∂x23
= 0, ın Ω = (x1, x2, x3) | x21 + x2
2 + x23 < r2
u(x1, x2, x3) = (x1 + x2 + x3)2, pentru (x1, x2, x3) ∈ ∂Ω.
2. Determinati functia Green a Problemei Dirichlet pentru cerc si rezolvatio Problema Dirichlet pentru cerc.

Functia Green pentru Problema Neumann 207
6.6 Functia Green pentru Problema
Neumann
Consideram Problema Neumann
−∆u = f, (∀)(x1, . . . , xn) ∈ Ω
∂u
∂n
∣∣∣∣∂Ω
= g(6.34)
ın care f : Ω → IR1 este functie de clasa C1 pe Ω si g : ∂Ω → IR1 este functiecontinua.
Presupunem ca functiile f si g verifica:∫
Ω
f(Y ) dY +
∫
∂Ω
g(Y ) dSY = 0. (6.35)
Definitia 6.6.1 Numim functia Green pentru Problema Neumann (6.34)orice functie G de forma
G(X, Y ) = E(X, Y ) − v(X, Y ) (6.36)
care verifica∂G
∂nY(X, Y ) = 0, (∀)Y = (y1, . . . , yn) ∈ ∂Ω (6.37)
unde v : Ω × Ω → IR1 si pentru orice Y ∈ Ω fixat functia Y 7→ v(X, Y ) estearmonica pe Ω, iar E(X, Y ) este definita pentru orice X, Y ∈ Ω, X 6= Y sieste data de:
E(X, Y )=
1
2πln
1
‖X−Y ‖ , (∀)X,Y ∈ Ω, X 6=Y, n=2
1
(n−2)σn· 1
‖X−Y ‖n−2, (∀)X,Y ∈ Ω, X 6=Y, n>2
(6.38)
Observatia 6.6.1 Daca G1 si G2 sunt functii Green pentru ProblemaNeumann, atunci G1 −G2 = const.
Propozitia 6.6.1 Daca pentru orice X ∈ Ω functia Y 7→ v(X, Y ) este declasa C1 pe Ω, atunci functia Green pentru Problema Neumann estesimetrica:
G(X1, X2) = G(X2, X1), (∀)X1, X2 ∈ Ω si X1 6= X2. (6.39)
208 CAPITOLUL 6
Demonstratie: Analoaga cu cea din cazul functiei Green pentru ProblemaDirichlet.
Teorema 6.6.1 Daca G este o functie Green pentru Problema Neumann(6.34) si u este o solutie a acestei probleme, atunci exista o constanta Castfel ca sa aibe loc egalitatea:
u(X) = −∫
Ω
G(X, Y ) · f(Y ) dY +
∫
∂Ω
E(X, Y ) · g(Y ) dSY + C. (6.40)
Demostratie: Analoaga cu cea de la cazul solutiei Problemei Dirichlet.
Observatia 6.6.2 Determinarea functiei Green pentru Problema Neumannrevine la determinarea functiei v(X, Y ) ceea ce ınseamna, conform definitieifunctiei Green pentru Problema Neumann, rezolvarea Problemei Neumann
−∆Y v(X, Y ) = f, (∀)(x1, . . . , xn) ∈ Ω
∂v
∂nY
∣∣∣∣∂Ω
=∂E
∂nY
∣∣∣∣∂Ω
(6.41)
Aceasta problema este aparent mai simpla decat Problema Neumann(6.34), dar ın realitate este complexa. De aceea demonstratia existenteisolutiei Problemei Neumann (6.34) prin folosirea functiei Green se poateface doar pentru cazuri pentru care se stie ca exista functia Green.

Probleme pentru ecuatia lui Laplace pe disc 209
6.7 Problemele Dirichlet si Neumann
pentru ecuatia lui Laplace pe disc.
Separarea variabilelor.
Consideram multimea Ω = (x1, x2) ∈ IR2| x21 + x2
2 < R2 care va fi numitadisc centrat ın origine si de raza R.
Ecuatia lui Poisson pe Ω este ecuatia:
∂2u
∂x21
+∂2u
∂x22
= −f(x1, x2) (6.42)
unde f este o functie de clasa C1 pe Ω.Daca functia f este identic nula, atunci ecuatia lui Poisson devine:
∂2u
∂x21
+∂2u
∂x22
= 0 (6.43)
si se numeste ecuatia lui Laplace pe discul Ω de raza R.
Problema Dirichlet pentru ecuatia lui Laplace pe discul de razaR ınseamnadeterminarea acelor solutii ale ecuatiei (6.43) care pe frontiera discului ∂Ωcoincid cu o functie continua h dinainte data, adica
∂2u
∂x21
+∂2u
∂x22
= 0, (∀)(x1, x2) ∈ Ω
u |∂Ω= h(6.44)
Solutia acestei Probleme Dirichlet se poate determina folosind functiaGreen pentru Problema Dirichlet.
Problema Neumann pentru ecuatia lui Laplace pe discul de razaR ınseamnadeterminarea acelor solutii ale ecuatiei (6.43) ale caror derivata dupa directiaversorului normalei exterioare la ∂Ω coincide cu o functie continua g dinaintedata pe ∂Ω, adica:
∂2u
∂x21
+∂2u
∂x22
= 0, ∀(x1, x2) ∈ Ω
∂u
∂n
∣∣∣∣∂Ω
= g(6.45)

210 CAPITOLUL 6
Pentru ca problema (6.45) sa aibe solutie este necesar ca
∫
∂Ω
g(Y )dsY = 0 (6.46)
si daca aceasta conditie este ındeplinita, atunci, folosind functia Green pentruProblema Neumann, se pot determina solutiile prolemei (6.45), (care diferaprintr-o constanta aditiva).
Scopul nostru ın acest paragraf este sa prezentam o alta metoda, numita”separarea variabilelor”, cu care se pot determina solutiile problemelor (6.44)si (6.45). Deoarece s-a considerat Ω ca fiind un domeniu circular vom facemai ıntai o schimbare de coordonate, mai exact vom scrie problemele (6.44)si (6.45) ın coordonate polare:
x1 = r cosϕx2 = r sinϕ
, r > 0, ϕ ∈ [0, 2π). (6.47)
Notam cu T transformarea (r, ϕ) → (x1, x2) definita de (6.47). Daca u esteo functie care satisface ecuatia (6.43) atunci notam cu u functia u = u T.
Folosind regulile de derivare ale functiilor compuse deducem ca u verificaecuatia:
∂2u
∂r2+
1
r2
∂2u
∂ϕ2+
1
r
∂u
∂r= 0 (6.48)
care se numeste ecuatia lui Laplace ın coordonate polare.Metoda separarii variabilelor consta ın cautarea unor solutii u(r, ϕ) de
forma:u(r, ϕ) = P (r) ·Q(ϕ) (6.49)
adica solutii care sunt produse de functii ce depind fiecare de cate o variabilar, respectiv ϕ. Impunand la (6.49) sa verifice (6.48) rezulta:
r2P′′
P+ r
P ′
P= −Q
′′
Q. (6.50)
Membrul stang ın aceasta egalitate depinde doar de r iar membrul drept deϕ. Cum r si ϕ sunt variabile independente rezulta ca fiecare membru esteconstant. Daca notam cu λ aceasta constanta atunci deducem din (6.50)egalitatile:
r2P ′′ + rP ′ − λP = 0 (6.51)

Probleme pentru ecuatia lui Laplace pe disc 211
Q′′ + λQ = 0 (6.52)
Deoarece functia u este de clasa C2 solutia ecuatiei (6.52) trebuie sa verificeQ(0) = Q(2π). De aici rezulta ca λn = n2, n ∈ IN .Pentru λn = n2 avem:
Qn(ϕ) = An cosnϕ +Bn sin nϕ (6.53)
ın care An si Bn sunt constante arbitrare.Ecuatia (6.51) este liniara de tip Euler si se rezolva facandu-se schimbareade variabila r = et. Pentru λ = n2 solutia generala este:
Pn(r) = Cnrn +Dnr
−n, daca n = 1, 2, ... (6.54)
P0(r) = A0 +B0 ln r, daca n = 0. (6.55)
Rezulta ın acest fel ca (6.48) admite urmatoarea familie de solutii:
un(r, ϕ) =
A0 +B0 ln r, n = 0rn(An cosnϕ +Bn sin nϕ), n = 1, 2, ...r−n(A−n cosnϕ+B−n sinnϕ), n = 1, 2, ...
(6.56)
ın care A0, B0, An, Bn, A−n, B−n sunt constante oarecare.
Observatia 6.7.1 Orice suma finita de solutii de forma (6.48) este solutiepentru ecuatia (6.48).
Definitia 6.7.1 O solutie formala a ecuatiei lui Laplace ın coordonate polareeste o ”functie” u(r, ϕ) de forma:
u(r, ϕ)=A0+B0 ln r+
∞∑
n=1
[(Anrn+A−nr
−n) cosnϕ+(Bnrn+B−nr
−n) sinnϕ]
(6.57)
Denumirea de solutie formala provine de la faptul ca nu avem informatiirelative la convergenta seriei (6.57). Ceea ce este clar este ca, termenii seriei(6.57) sunt solutii si ca, daca seria are doar un numar finit de termeni diferitide zero, atunci suma este o functie care este solutie a ecuatiei lui Laplace.

212 CAPITOLUL 6
Pentru determinarea solutiei Problemei Dirichlet (6.44), mai ıntai sriemproblema ın coordonate polare:
∂2u
∂r2+
1
r2
∂2u
∂ϕ2+
1
r
∂u
∂r= 0, r < R, ϕ ∈ [0, 2π)
u(r, ϕ) = u(r, ϕ+ 2π)
limr→0
| u(r, ϕ) |< +∞
u(R,ϕ) = h(ϕ)
(6.58)
unde h(ϕ) = h(R cosϕ,R sinϕ).
Consideram dezvoltarea functiei h ın serie Fourier ın L2[0, 2π)
h(ϕ) = a0 +
∞∑
n=1
(an cos nϕ+ bn sinnϕ) (6.59)
si impunem solutiei formale u(r, ϕ) data de (6.57) sa verifice conditiile (6.58).Deducem:
A0 = a0, An =an
Rnsi Bn =
bnRn
care ınlocuite, conduc la solutia formala:
u(r, ϕ) = a0 +
∞∑
n=1
rn
Rn(an cos nϕ+ bn sinnϕ). (6.60)
Pentru a demonstra ca aceasta solutie formala este solutia problemei vompresupune ca functia h este de clasa C2 si h(0) = h(2π). In aceste conditii
pentru coeficientii Fourier an, bn ai functiei h putem scrie:
an = −1
nbn
′ = − 1
n2an
′′ si bn =1
nan
′ = − 1
n2bn
′′. (6.61)
unde a′n, b′n si a′′n, b
′′n sunt coeficientii Fourier ai functiei h′, respectiv h′′.
Din apartenenta h′′ ∈ L2[0, 2π) avem
∞∑
n=1
(|an′′|2 + |bn′′|2) < +∞ de unde
rezulta ca exista M > 0 astfel ıncat sa avem |an′′| ≤ M si |bn′′| ≤ M pentru

Probleme pentru ecuatia lui Laplace pe disc 213
orice n ∈ IN. De aici si din (6.61) se obtine inegalitatea:
∞∑
n=1
(|an|2 + |bn|2) ≤ 2M
∞∑
n=1
1
n2< +∞
Cu criteriul lui Weierstrass rezulta de aici ca seria (6.60) este absolut siuniform convergenta pe [0, R]× [0, 2π], deci functia u(r, ϕ) definita de (6.60)este corect definita si este continua pe [0, R] × [0, 2π].
Derivabilitatea u(r, ϕ) rezulta din derivabilitatea termenilor seriei (6.60)si din faptul ca seriile obtinute prin derivare termen cu termen sunt absolutsi uniform convergente fiind majorate de serii de forma
∞∑
n=1
np( rR
)n
[| an | + | bn |], p = 1, 2, ...
Calculand suma seriei obtinem formula:
u(r, ϕ) =1
2π
∫ 2π
0
h(θ)R2 − r2
r2 − 2Rr cos(ϕ− θ) +R2dθ (6.62)
numita formula lui Poisson.Pentru determinarea solutiei Problemei Neumann se procedeaza
asemanator.
Exercitii
1.Gasiti solutia Problemei Dirichlet:
∂2u
∂x21
+∂2u
∂x22
= 0, x21 + x2
2 < R2
u(x1, x2) = (x1 + x2)2, x2
1 + x22 = R2
R: u(x1, x2) = R2 + 2x1x2
2.Gasiti solutia Problemei Dirichlet:
∂2u
∂x21
+∂2u
∂x22
= 0, x21 + x2
2 < 1
u(x1, x2) = x1 · x2, x21 + x2
2 = 1

214 CAPITOLUL 6
R: u(x1, x2) = x1x2
3.Gasiti solutia Problemei Neumann:
∂2u
∂x21
+∂2u
∂x22
= 0, x21 + x2
2 < R2
∂u
∂n= x1 + x2
1 − x22, x2
1 + x22 = R2
R: u(x1, x2) = A0 +Rx1 +R
2(x2
1 − x22)

Calculul simbolic al solutiei Problemei Dirichlet pentru ecuatia lui Laplace pe disc 215
6.8 Calculul simbolic al solutiei Problemei
Dirichlet pentru ecuatia lui Laplace
pe disc
Cosideram Problema Dirichlet pentru ecuatia lui Laplace pe discul deraza R:
∂2u
∂x2+∂2u
∂y2= 0, (∀)(x, y) ∈ Ω
u |∂Ω= h(6.63)
Functia pdsolve nu poate gasi direct, prin calcul simbolic solutia core-spunzatoare unei astfel de probleme. Astfel, pe baza notiunilor teoreticeprezentate ın paragraful precedent (formula pentru solutia formala), vomprezenta un program in Maple care sa afiseze expresia analitica a solutieiProblemei Dirichlet (6.63).Scriind problema ın coordonate polare:
∂2u
∂r2+
1
r2
∂2u
∂ϕ2+
1
r
∂u
∂r= 0, r < R, ϕ ∈ [0, 2π)
u(r, ϕ) = u(r, ϕ+ 2π)
limr→0
| u(r, ϕ) |< +∞
u(R,ϕ) = h(ϕ)
(6.64)
si dezvoltand functia h ın serie Fourier, se obtine solutia formala:
u(r, ϕ) = a0 +
∞∑
n=1
rn
Rn(an cosnϕ+ bn sin nϕ). (6.65)
ın care a0, an, bn sunt coeficientii Fourier:
a0 =1
2π
∫ π
−π
h(ϕ)dϕ an =1
π
∫ π
−π
h(ϕ) · cos nϕdϕ
bn =1
π
∫ π
−π
h(ϕ) · sinnϕdϕ

216 CAPITOLUL 6
Aceasta solutie formala se obtine ınMaple cu ajutorul proceduriiDirichletInt:
> restart;
> DirichletInt:=proc(f,R)
local a0,a,b;> a0:=(1/(2*Pi))*Int(f,phi=-Pi..Pi);> a:=n->1/Pi*Int(f*cos(n*phi),phi=-Pi..Pi);
> b:=n->1/Pi*Int(f*sin(n*phi),phi=-Pi..Pi);
> a0+add(r^n/R^n*(a(n)*cos(n*phi)+b(n)*sin(n*phi)),n=1..Order);
> RETURN(map(simplify,value(%)));
> end:
Apelarea acestei proceduri se realizeaza cu instructiuneaDirichletInt(f, R)
ın care f este functia h din problema (6.64), dupa cum se poate observa dinurmatoarele exemple:
Exemplul 1:
∂2u
∂x21
+∂2u
∂x22
= 0, x21 + x2
2 < R2
u(x1, x2) = (x1 + x2)2, x2
1 + x22 = R2
> f:=(x1+x2)^2: R:=R:
> f:=subs(x1=r*cos(phi),x2=r*sin(phi),r=R,f);
f := (R cos (φ) +R sin (φ))2
> sol1:=DirichletInt(f,R);
sol1 := R2 + r2 sin (2φ)
Exemplul 2:
∂2u
∂x21
+∂2u
∂x22
= 0, x21 + x2
2 < 1
u(x1, x2) = x1 · x2, x21 + x2
2 = 1

Calculul simbolic al solutiei Problemei Dirichlet pentru ecuatia lui Laplace pe disc 217
> f:=x1*x2: R:=1:
> f:=subs(x1=r*cos(phi),x2=r*sin(phi),r=R,f);
f := cos (φ) sin (φ)
> sol2:=DirichletInt(f,R);
sol2 := 1/2 r2 sin (2φ)
Exemplul 3:
∂2u
∂r2+
1
r2
∂2u
∂ϕ2+
1
r
∂u
∂r= 0, r < 1, ϕ ∈ [0, 2π)
u(r, ϕ) = u(r, ϕ+ 2π)
limr→0
| u(r, ϕ) |< +∞
u(1, ϕ) = sin3 ϕ
> f:=sin(phi)^3: R:=1:
> sol3:=DirichletInt(f,R);
sol3 := 3/4 r sin (φ) − 1/4 r3 sin (3φ)
Exemplul 4:
∂2u
∂r2+
1
r2
∂2u
∂ϕ2+
1
r
∂u
∂r= 0, r < 1, ϕ ∈ [0, 2π)
u(r, ϕ) = u(r, ϕ+ 2π)
limr→0
| u(r, ϕ) |< +∞
u(1, ϕ) = sin6 ϕ+ cos6 ϕ
> f:=sin(phi)^6+cos(phi)^6: R:=1:
> sol4:=DirichletInt(f,R);
sol4 := 5/8 + 3/8 r4 cos (4φ)
Capitolul 7
Solutii generalizate.Metode variationale
In capitolul anterior ne-am ocupat de rezolvarea Problemei Dirichlet si aProblemei Neumann ın cazul ecuatiei lui Poisson. Particularitatea acesteiecuatii consta ın aceea ca ecuatia eliptica este definita de Laplacianul .
In cele ce urmeaza vom considera ecuatii eliptice mai generale, numiteecuatii eliptice de tip divergenta pentru care vom formula conceptul de Prob-lema Dirichlet. Pe langa conceptul de solutie clasica introducem si conceptulde solutie generalizata si prezentam conditii ın care solutia generalizata existasi este unica.
Deasemenea , ın acest capitol introducem Problema Cauchy-Dirichletpentru ecuatii parabolice si hiperbolice, si prezentam conditii ın care solutiageneralizata a acestor probleme exista.
218

Ecuatia eliptica de tip divergenta si Problema Dirichlet 219
7.1 Ecuatia eliptica de tip divergenta si
Problema Dirichlet pentru aceasta ecuatie
Consideram un domeniu marginit Ω ⊂ IRn cu frontiera ∂Ω neteda (partialneteda) si functiile reale aij , c si F definite pe Ω (i, j = 1, n) avand urmatoareleproprietati:
1) aij sunt de clasa C1 pe Ω si exista µ0 > 0 astfel ıncat pentru oriceX = (x1, ..., xn) ∈ Ω si orice (ξ1, ξ2, . . . , ξn) ∈ IRn avem
n∑
i,j=1
aij(X) · ξi · ξj ≥ µ0 ·n∑
i=1
ξ2i si aij(X) = aji(X)
2) functia c este continua pe Ω si c(X) ≥ 0, (∀)X ∈ Ω.
3) functia F este continua pe Ω.
Definitia 7.1.1 Se numeste ecuatie cu derivate partiale eliptica de tip divergentao relatie de dependenta functionala de forma
−n∑
i=1
∂
∂xi
(n∑
j=1
aij(X) · ∂u∂xj
)+ c(X) · u = F (X), (∀) X ∈ Ω (7.1)
dintre functia necunoscuta u si derivatele sale partiale de ordinul ıntai si deordinul al doilea.
In ecuatia (7.1) functiile aij, c si F se considera cunoscute.
Definitia 7.1.2 O functie reala u de clasa C2 pe Ω care verifica
−n∑
i=1
∂
∂xi
(n∑
j=1
aij(X) · ∂u∂xj
(X)
)+ c(X) · u(X) = F (X), (∀) X ∈ Ω
se numeste solutie clasica a ecuatiei (7.1).
Definitia 7.1.3 Problema determinarii acelor solutii u ale ecuatiei (7.1)care sunt continue pe Ω si verifica conditia la frontiera
u|∂Ω = h (7.2)
se numeste Problema Dirichlet pentru ecuatia (7.1).

220 CAPITOLUL 7
In egalitatea (7.2), h este o functie reala continua pe ∂Ω, considerata cunos-cuta.
Problema Dirichlet pentru ecuatia cu derivate partiale eliptica de tip divergentase noteaza cu
−n∑
i=1
∂
∂xi
(n∑
j=1
aij(X) · ∂u∂xj
)+ c(X) · u=F (X), (∀) X ∈ Ω
u|∂Ω = h.
(7.3)
Observatia 7.1.1 Daca exista o functie H : Ω′ ⊃ Ω → IR′ de clasa C2
astfel ıncat H|∂Ω = h atunci u este solutie a Problemei Dirichlet (7.3) dacasi numai daca functia v = u−H este solutia Problemei Dirichlet:
−n∑
i=1
∂
∂xi
(n∑
j=1
aij(X) · ∂v∂xj
)+ c(X) · v=G(X), (∀) X ∈ Ω
v|∂Ω = 0
(7.4)
unde G(X) = F (X) − c(X) ·H(X) +n∑
i=1
∂
∂xi
(n∑
j=1
aij(X) · ∂H∂xj
).
Astfel, printr-o schimbare de functie Problema Dirichlet cu conditii pe fron-tiera neomogene se reduce la o Problema Dirichlet cu conditii pe frontieraomogene.Datorita acestui fapt, ın cele ce urmeaza vom considera ProblemeDirichlet ın care functia h data pe frontiera este identic nula.
Observatia 7.1.2 Daca se considera spatiul vectorial al functiilor reale ucontinue pe Ω de clasa C2 ın Ω si nule pe frontiera :
D =u | u : Ω → IR1, u ∈ C(Ω) ∩ C2(Ω) si u|∂Ω = 0,
si operatorul diferential A definit pe acest spatiu vectorial D cu formula:
(Au)(X) = −n∑
i=1
∂
∂xi
(n∑
j=1
aij(X) · ∂u∂xj
)+ c(X) · u (7.5)

Ecuatia eliptica de tip divergenta si Problema Dirichlet 221
atunci Problema Dirichlet :
−n∑
i=1
∂
∂xi
(n∑
j=1
aij(X) · ∂u∂xj
)+ c(X) · u = F (X), (∀) X ∈ Ω
u|∂Ω = 0
(7.6)
este echivalenta cu problema urmatoare :Sa se determine u ∈ D astfel ıncat sa avem :
Au = F,unde
D=u | u : Ω → IR1, u ∈ C(Ω) ∩ C2(Ω) si u|∂Ω = 0
.
(7.7)
In aceasta formulare a Problemei Dirichlet conditia la limita nu mai apareseparat pentru ca este inclusa ın definitia spatiului vectorial D (adica dome-niul de definitie a lui A).
Problema unicitatii solutiei clasice a Problemei Dirichlet revine lainjectivitatea operatorului A : D → C(Ω) iar problema existentei solutieiclasice revine la surjectivitatea operatorului A.
In cele ce urmeaza vom pune ın evidenta proprietati ale operatoruluiA pentru a raspunde la problema existentei si unicitatii solutiei ProblemeiDirichlet (7.6)
Teorema 7.1.1 Operatorul A definit pe spatiul de functii D cu formula (7.5)are urmatoarele proprietati:
i) domeniul de definitie D al operatorului A este un subspatiu dens ınspatiul Hilbert L2(Ω);
ii) operatorul A este liniar ;
iii) pentru orice u, v ∈ D are loc egalitatea∫
Ω
Au · vdX =
∫
Ω
Av · udX
Demonstratie:i) Presupunem cunoscut faptul ca spatiul vectorial D(Ω) format cu functiile

222 CAPITOLUL 7
reale u de clasa C∞ pe Ω si cu suport compact inclus ın Ω:
D(Ω) = u | u : Ω → IR1, u ∈ C∞(Ω), supp u ⊂ Ω
este dens ın L2(Ω). Intrucat spatiul de functii D include spatiul vectorialD(Ω) rezulta ca spatiul D este dens ın L2(Ω).ii) Pentru a demonstra ca A este liniar, vom arata ca
A(u+ v) = Au+ AvA(α · u) = α · Au (∀) u, v ∈ D, (∀) α ∈ IR1.
Intr-adevar,
A(u+ v) =
= −n∑
i=1
∂
∂xi
(n∑
j=1
aij(X) · ∂(u+ v)
∂xj
)+ c(X) · (u+ v) =
= −n∑
i=1
∂
∂xi
(n∑
j=1
aij(X) · ∂u∂xj
)+ c(X) · u−
n∑
i=1
∂
∂xi
(n∑
j=1
aij(X) · ∂v∂xj
)+
+ c(X) · v = Au+ Av.
si
A(α · u)=−n∑
i=1
∂
∂xi
(n∑
j=1
aij(X) · ∂(α · u)∂xj
)+ c(X) · (α · u)=α · Au,
ceea ce demonstreaza liniaritatea lui A.
iii) Pentru u, v ∈ D calculam
∫
Ω
Au · vdX si gasim :
∫
Ω
Au·v dX = −∫
Ω
n∑
i=1
∂
∂xi
(n∑
j=1
aij(X)· ∂u∂xj
)·v dX +
∫
Ω
c(X)·u·v dX
= −∫
∂Ω
n∑
i=1
n∑
j=1
aij(X)· ∂u∂xj
·cos(u, ei)·v dS+

Ecuatia eliptica de tip divergenta si Problema Dirichlet 223
+
∫
Ω
n∑
i=1
n∑
j=1
aij(X)· ∂u∂xj
· ∂v∂xi
dX+
∫
Ω
c(X)·u·v dX
=
∫
Ω
n∑
i=1
n∑
j=1
aij(X)· ∂u∂xj
· ∂v∂xi
dX+
∫
Ω
c(X)·u·v dX
Calculand ın continuare
∫
Ω
Av ·u dX gasim:
∫
Ω
Av ·u dX =
∫
Ω
n∑
i=1
n∑
j=1
aij(X)· ∂v∂xj
· ∂u∂xi
dX+
∫
Ω
c(X)·u·v dX.
Deoarece aij(X) = aji(X) rezulta
∫
Ω
Au · vdX =
∫
Ω
Av · udX
Teorema 7.1.2 Exista γ > 0 astfel ıncat pentru orice u ∈ D sa avem
∫
Ω
Au · udX ≥ γ
∫
Ω
u2dX (7.8)
Demonstratie: Calculam
∫
Ω
Au · udX si obtinem :
∫
Ω
Au · udX =
∫
Ω
n∑
i=1
n∑
j=1
aij(X)∂u
∂xi
∂u
∂xjdX +
∫
Ω
c(X)u2(X) dX ≥
≥∫
Ω
µ0
n∑
i=1
∣∣∣∣∂u
∂xi
∣∣∣∣2
dX +
∫
Ω
c(X)u2(X) dX
Ramane sa evaluam
∫
Ω
n∑
i=1
∣∣∣∣∂u
∂xi
∣∣∣∣2
dX pentru u ∈ D. Aceasta evaluare con-
stitue continutul unei teoreme care poarta numele lui Friedrichs. Conformacestei teoreme exista o constanta k > 0, astfel ıncat pentru orice u ∈ C1(Ω)cu u|∂Ω = 0 avem:
∫
Ω
|u(X)|2dX ≤ k
∫
Ω
n∑
i=1
∣∣∣∣∂u
∂xi
∣∣∣∣2
dX.

224 CAPITOLUL 7
Admitand pentru moment ca aceasta evaluare este adevarata putem continuaevaluarea deja stabilita
∫
Ω
Au · udX ≥ µ0
∫
Ω
n∑
i=1
∣∣∣∣∂u
∂xi
∣∣∣∣2
dX +
∫
Ω
c(X)u2(X)dX,
si gasim:∫
Ω
Au · udX ≥ µ0
k·∫
Ω
|u(X)|2dX +
∫
Ω
c(X)u2(X)dX ≥ µ0
k
∫
Ω
|u(X)|2dX
Astfel inegalitatea (7.8) a fost demonstrata.Ramane sa demonstram acum teorema folosita ın demonstratia teoremei
(7.1.2) denumita inegalitatea lui Friedrichs.
Teorema 7.1.3 (inegalitatea lui Friedrichs) Exista o constanta k > 0, astfelıncat pentru orice u ∈ C1(Ω) cu u|∂Ω = 0 sa avem:
∫
Ω
|u(X)|2dX ≤ k
∫
Ω
n∑
i=1
∣∣∣∣∂u
∂xi
∣∣∣∣2
dX. (7.9)
Demonstratie: Domeniul Ω fiind marginit exista o translatieT : IRn → IRn, (TX = X + X0) astfel ıncat pentru orice X ′ ∈ Ω′ = TΩsa avem x′i ≥ 0. Deoarece
∫
Ω′
|u′(X ′)|2 dX ′ =
∫
Ω
|u(X)|2 dX si
∫
Ω′
∣∣∣∣∂u′
∂x′i
∣∣∣∣2
dX ′ =
∫
Ω
∣∣∣∣∂u
∂xi
∣∣∣∣2
dX
unde u′(X ′) = u(TX) si X ′ = TX, rezulta ca este suficient sa se demonstrezeinegalitatea (7.9) pe Ω′. Mai mult, Ω′ fiind domeniu marginit exista a > 0astfel ca Ω′ ⊂ Γa = X ′ | 0 ≤ x′i ≤ a si prelungind cu 0 functia u′ pe ΓaΩ′
rezulta ca, are loc:
∫
Ω′
|u′(X ′)|2 dX ′ =
∫
Γa
|u′(X ′)|2 dX ′ si
∫
Ω′
∣∣∣∣∂u′
∂x′i
∣∣∣∣2
dX ′ =
∫
Γa
∣∣∣∣∂u′
∂x′i
∣∣∣∣2
dX ′
Astfel, ajungem la concluzia ca, este suficient sa demonstram inegalitatea(7.9) doar pentru Ω = Γa. Pentru aceasta folosim formula lui Leibnitz-Newton
u(x1, x2, ...xn) =
∫ xi
0
∂u
∂xi
(x1, ..., xi−1, ξ, xi+1, ...xn)dξ

Ecuatia eliptica de tip divergenta si Problema Dirichlet 225
din care utilizand Cauchy-Buniakovski rezulta:
|u(X)| ≤∫ xi
0
∂u
∂xi
(x1, ..., xi−1, ξ, xi+1, ..., xn)dξ ≤
≤(∫ xi
0
dξ
)1/2(∫ xi
0
∣∣∣∣∂u
∂xi(x1, ..., xi−1, ξ, xi+1, ..., xn)
∣∣∣∣2
dξ
)1/2
≤
≤ a1/2
(∫ a
0
∣∣∣∣∂u
∂xi
|(x1, ..., xi−1, ξ, xi+1, ...xn)
∣∣∣∣2
dξ
)1/2
.
De aici obtinem:∫
Γa
|u(X)|2dX ≤ a2
∫
Γa
∣∣∣∣∂u
∂xi
∣∣∣∣2
dX
∫
Γa
|u(X)|2dX ≤ a2
n
∫
Γa
n∑
i=1
∣∣∣∣∂u
∂xi
∣∣∣∣2
dX.
Astfel rezulta astfel ca pentru k =a2
nare loc inegalitatea (7.9).
Teorema 7.1.4 (de caracterizare variationala a solutiei ecuatieiAu = F ).Functia u0 ∈ D este solutie a ecuatiei Au = F (F ∈ C(Ω)) daca si numaidaca u0 este punct de minim pentru functionala:
ΦF : D → IR1, ΦF (u) =
∫
Ω
Au · udX − 2
∫
Ω
F · udX. (7.10)
Demonstratie: Daca u0 ∈ D este solutie a ecuatiei Au = F atunci Au0 = Fsi pentru orice u ∈ D avem:
ΦF (u) − ΦF (u0)=
∫
Ω
Au·udX−2
∫
Ω
F ·udX −∫
Ω
Au0 ·u0dX+2
∫
Ω
F ·u0dX=
=
∫
Ω
Au·udX−2
∫
Ω
Au0 ·u−∫
Ω
Au0 ·u0dX+2
∫
Ω
Au0 ·u0dX=
=
∫
Ω
Au· udX−∫
Ω
Au0 · u−∫
Ω
u0 ·AudX+
∫
Ω
Au0 · u0dX =
=
∫
Ω
A(u− u0) · (u− u0)dX ≥ γ
∫
Ω
|u− u0|2dX ≥ 0.

226 CAPITOLUL 7
Rezulta astfel ca u0 este minim absolut pentru functionala ΦF .Reciproc, daca presupunem ca u0 ∈ D este punct de minim absolut pentru
functionala ΦF , atunci pentru orice u ∈ D avem
ΦF (u) ≥ ΦF (u0)
Consideram u ∈ D, u-fixat, t ∈ IR1 si remarcam ca:
ΦF (u0 + tu) ≥ ΦF (u0)
pentru orice t ∈ IR1. Prin urmare functia
ϕ(t) = ΦF (u0 + tu)
are un minim ın t = 0. Din conditia ϕ′(0) = 0 rezulta:
∫
Ω
(Au0 − F )udX = 0 (∀)u ∈ D
Deoarece spatiul vectorial D este dens ın spatiu Hilbert L2(Ω) rezulta caAu0 = F.
Observatia 7.1.3 Aceasta teorema nu este o teorema de existenta pentruca nu stabileste faptul ca functionala ΦF are un punct de minim absolut.
Teorema reduce ınsa problema existentei si unicitatii solutiei clasice aecuatiei Au = F la problema existentiei si unicitatii punctului de minim alfunctionalei ΦF .
Teorema 7.1.5 (teorema de unicitate)Pentru F ∈ C(Ω) exista cel mult un u0 ∈ D astfel ıncat Au0 = F .
Demonstratie: Presupunem ca pentru F ∈ C(Ω) existau1, u2 ∈ D astfel ıncat Au1 = F si Au2 = F . De aici rezulta ΦF (u2) ≥ ΦF (u1)si ΦF (u1) ≥ ΦF (u2). Prin urmare ΦF (u2) = ΦF (u1). Tinand seama de ine-galitatea:
ΦF (u1) − ΦF (u2) ≥ γ
∫
Ω
|u1 − u2|2dX
rezulta ın continuare ca
∫
Ω
|u1 − u2|2dX = 0 de unde rezulta egalitatea
u1 = u2.

Ecuatia eliptica de tip divergenta si Problema Dirichlet 227
Observatia 7.1.4 i) Teorema de unicitate demonstreaza ca Problema Dirich-let are cel mult o solutie clasica.ii) Existenta unui minim absolut ın D a functionalei ΦF (u) nu este adevarata.Exista exemple care demonstreaza ca ın general Problema Dirichlet nu aresolutie clasica.
Pentru a asigura minimul absolut al functionalei ΦF largim spatiul vecto-rial D astfel ca sa devina spatiu Hilbert. In acest scop, pe D × D definimurmatoarea corespondenta:
D ×D ∋ (u, v) →< u, v >A=
∫
Ω
Au · vdX. (7.11)
Lema 7.1.1 Corespondenta definita cu (7.11) este un produs scalar pe spatiulvectorial D.
Demonstratie: prin verificare.
Observatia 7.1.5 Pentru (u, v) ∈ D are loc egalitatea:
< u, v >A=
∫
Ω
n∑
i=1
n∑
j=1
aij(X)∂u
∂xi
∂v
∂xjdX +
∫
Ω
c(X)u(X)v(X)dX
Definitia 7.1.4 Completatul spatiului vectorial D ın norma ‖ · ‖A
generata de produsul scalar
< u, v >A=
∫
Ω
Au · vdx
se numeste spatiul energetic al operatorului A si se noteaza cu XA.
Observatia 7.1.6 Elementele spatiului energeticXA sunt elementele spatiuluivectorial D la care se mai adauga limite ın norma ‖ · ‖A de siruri fundamen-tale un din D. Altfel spus, daca u ∈ XA atunci u ∈ D sau exista (un)n cuun ∈ D astfel ıncat ‖un − u‖A → 0. Un element u ∈ XA are proprietatea:
u ∈ L2(Ω),∂u
∂xi∈ L2(Ω) si u|∂Ω = 0

228 CAPITOLUL 7
Observatia 7.1.7 Spatiul energeticXA ımpreuna cu produsul scalar< u, v >A
este un spatiu Hilbert.
Lema 7.1.2 Functionala ΦF : D → IR′ definita de formula
ΦF (u) =
∫
Ω
Au · udX − 2
∫
Ω
F · udX (7.12)
ın care F ∈ L2(Ω), se prelungeste prin continuitate la o functionala continua
ΦF definita pe spatiul energetic XA.
Demonstratie: Aratam la ınceput ca functionala ΦF (u) definita cu(7.12) este continua ın topologia spatiului energetic. In acest scop consideramu ∈ D, un sir (un)n, un ∈ D cu proprietatea ca ‖un − u‖A →
n0 si apoi sirul
ΦF (un) =
∫
Ω
Aun · undX − 2
∫
Ω
F · undX.
Aratam ca acest sir numeric este convergent si limita lui este
ΦF (u) =
∫
Ω
Au · udX − 2
∫
Ω
F · udX.
Intr-adevar, avem:
ΦF (un) = ‖un‖2A − 2
∫
Ω
F · undX
ΦF (u) = ‖u‖2A − 2
∫
Ω
F · udX
de unde rezulta:
|ΦF (un) − ΦF (u)| ≤ | ‖un‖2A − ‖u‖2
A | + 2
∫
Ω
|F | · |un − u|dX ≤
≤ | ‖un‖2A − ‖u‖2
A | + 2‖F‖L2(Ω) · ‖un − u‖L2(Ω).
Deoarece convergenta ‖un − u‖A → 0 implica convergentele| ‖un‖2
A − ‖u‖2A| → 0 si ‖un − u‖L2(Ω) → 0, rezulta convergenta
|ΦF (un) − ΦF (u)| → 0.

Ecuatia eliptica de tip divergenta si Problema Dirichlet 229
Daca u ∈D si u ∈ XA atunci se defineste ΦF (u) cu
ΦF (u) =
∫
Ω
n∑
i=1
n∑
j=1
aij(X)∂u
∂xi
∂u
∂xjdX − 2
∫
Ω
F · udX
iar pentru un ∈ D, ‖un − u‖A → 0 se reface acelasi rationament.
Teorema 7.1.6 (de existenta si unicitate a punctului de minimabsolut)
Pentru orice F ∈ L2(Ω) prelungita ΦF prin continuitate a functionaleiΦF la spatiul energetic XA are un singur punct de minim.
Demonstratie: Pentru a demonstra existenta punctului de minim con-sideram functionala liniara si continua
u 7−→∫
Ω
F · udX
definita pe spatiul energetic XA. Conform cu teoremei lui F. Riesz exista ofunctie uF ∈ XA astfel ıncat sa avem:
< uF , u >A=
∫
Ω
F · udX
pentru orice u ∈ XA. Ramane de aratat ca uF este punctul de minim absolutal functionalei ΦF (u).In acest scop calculam ΦF (uF ) si ΦF (u) pentru u ∈ XA.Avem:
ΦF (uF ) = < uF , uF >A −2 < F, uF >L2(Ω)= ‖uF‖2A − 2‖uF‖2
A =−‖uF‖2A
ΦF (u) = < u, u >A −2 < F, u >L2(Ω)
= < u−uF , u−uF >A +2< uF , u >A−< uF , uF >A−2< F, u >L2(Ω)
= ‖u− uF‖2A − ‖uF‖2
A = ‖u− uF‖2A + ΦF (uF )
Aceasta din urma egalitate
ΦF (u) = ‖u− uF‖2A + ΦF (uF )
este adevarata pentru orice u ∈ XA si arata ca
ΦF (u) ≥ ΦF (uF ).
Egalitatea arata si faptul ca
ΦF (u) > ΦF (uF )
pentru orice u 6= uF ceea ce demonstreaza unicitatea.

230 CAPITOLUL 7
Observatia 7.1.8 Daca punctul de minim absolut uF al functionalei pre-lungite ΦF apartine lui D ⊂ XA atunci AuF = F , si prin urmare uF , estesolutie clasica a Problemei Dirichlet.
Observatia 7.1.9 Daca punctul de minim absolut uF al functionalei pre-lungite ΦF nu apartine spatiului vectorial D ⊂ XA atunci nu-i putem aplicaoperatorul A ca sa vedem daca este solutie a ecuatiei Au = F . In acestcaz este naturala ıntrebarea: Ce reprezinta uF ın contextul rezolvarii ecuatieiAu = F?
Vom da un raspuns la aceasta ıntrebare aratand ca operatorul A are o prelun-gire A : D(A) → L2(Ω), numita prelungirea Friedrichs, unde D ⊂ D(A) ⊂XA si ca uF verifica AuF = F. Aceasta ınseamna ca functia uF nu mai verificaconditia de solutie clasica :
u ∈ D si −n∑
i=1
∂
∂xi
(n∑
j=1
aij(X) · ∂u∂xj
)+ c(X) · u = F
ci verifica doar conditia : uF ∈ XA si
∫
Ω
n∑
i=1
n∑
j=1
aij(X)·∂uF
∂xj· ∂v∂xi
dx+
∫
Ω
c(X)·uF ·v dX=
∫
Ω
F ·v dX, (∀) v ∈ XA
Teorema 7.1.7 (de prelungire a lui Friedrichs).Operatorul G : L2(Ω) → XA definit prin G(F )=uF ∈ XA unde uF verifica
< uF , u >A=< F, u >L2(Ω), (∀) u∈XA,
are urmatoarele proprietati:
i) G este liniar si marginit ;
ii) G este injectiv ;
iii) G este autoadjuct ;
iv) G este compact ;

Ecuatia eliptica de tip divergenta si Problema Dirichlet 231
v) G−1 : ImG ⊂ XA → L2(Ω) este o prelungire a lui A.
Demonstratie: Remarcam la ınceput ca operatorul G este corect definitpentru ca existenta si unicitatea functiei uF = G(F ) a fost demonstrata.i) Pentru α, β ∈ IR1, F1, F2 ∈ L2(Ω) si u ∈ XA avem:
< G(αF1 + βF2), u >A = < αF1 + βF2, u >L2(Ω)
= < αF1, u >L2(Ω) + < βF2, u >L2(Ω)
= α < F1, u >L2(Ω) +β < F2, u >L2(Ω)
= < αG(F1) + βG(F2), u >L2(Ω)
de unde rezulta egalitatea :
G(αF1 + βF2) = αG(F1) + βG(F2)
care arata ca operatorul G este liniar.Pentru a demonstra marginirea operatorului G consideram
F ∈ L2(Ω) si evaluam ‖G(F )‖2A. Avem:
µ20
k2· ‖G(F )‖2
L2(Ω) ≤ ‖G(F )‖2A = < F,G(F ) >L2(Ω)
≤ ‖F‖L2(Ω) · ‖G(F )‖L2(Ω)
unde k > 0 este constanta din inegalitatea lui Friedrichs si µ0 > 0 este con-stanta din conditia de elipticitate.Simplificand cu ‖G(F )‖L2(Ω) ın inegalitatea obtinuta, rezulta:
‖G(F )‖L2(Ω) ≤k2
µ20
· ‖F‖L2(Ω)
care arata ca operatorul G : L2(Ω) → L2(Ω) este marginit.

232 CAPITOLUL 7
ii)
G(F )=0 ⇒ < uF , u >A= 0, (∀)u∈XA
⇒ < F, u >L2(Ω)= 0, (∀)u∈XA ⇒ F =0
iii) Operatorul G : L2(Ω) → ImG ⊂ XA fiind injectiv putem consideraoperatorul G−1 : ImG→ L2(Ω) si aratam ca este autoadjunct, adica :
< G−1u, v >L2(Ω)=< u,G−1v >L2(Ω), (∀)u, v ∈ ImG.
Astfel,
< G−1u, v >L2(Ω) = < u, v >A=< v, u >A=< G−1v, u >L2(Ω)
= < u,G−1v >L2(Ω) .
Folosim acum acest rezultat pentru a demonstra ca operatorul G este au-toadjunct:
< G(F ), H >L2(Ω)=< G(F ), G−1(G(H)) >L2(Ω=
=< G−1(G(F )), G(H) >L2(Ω)=< F,G(H) >L2(Ω) .
iv) Prin faptul ca operatorul G este compact ıntelegem ca transformasfera ınchisa de raza unu din L2(Ω) ıntr-o multime compacta din L2(Ω).Consideram F ∈ L2(Ω) cu ‖F‖L2(Ω) ≤ 1.Calculam ‖G(F )‖2
A si gasim:
‖G(F )‖2A =< F,G(F ) >L2(Ω) ≤ ‖F‖2
L2(Ω) · ‖G(F )‖2L2(Ω)
≤ ‖F‖L2(Ω) ·k
µ0· ‖G(F )‖A.
Simplificand cu ‖G(F )‖A obtinem :
‖G(F )‖A ≤ k
µ0
· ‖F‖L2(Ω) ≤k
µ0
,
ceea ce arata ca imaginea sferei ınchise de raza unu din L2(Ω) prin oper-atorul G este o multime marginita ın spatiul energetic XA. Stiind ca o

Ecuatia eliptica de tip divergenta si Problema Dirichlet 233
multime marginita ın XA este compacta ın L2(Ω) deducem ca operatorul Geste compact.
v) Aratam acum ca operatorul G−1 : ImG ⊂ XA → L2(Ω) este o prelun-gire a operatorului A.Din cele de pana acum stim ca G−1 : ImG ⊂ XA → L2(Ω) este un operatorinjectiv.Consideram u ∈ D si apoi Au ∈ L2(Ω). Functia GAu apartine la Im G siavem :
< GAu, v >A=< Au, v >L2(Ω)=< u, v >A (∀)v ∈ XA.
Rezulta de aici egalitatea :
GAu = u, (∀) u ∈ D,
care demonstreaza apartenenta u ∈ ImG si egalitatea G−1u = Au. Amaratat ın acest fel ca operatorul G−1 : ImG ⊂ XA → L2(Ω) este o prelungirea operatorului A.
Definitia 7.1.5 Operatorul G−1 se numeste prelungirea Friedrichs a opera-torului A si se noteaza cu A.
Teorema 7.1.8 (caracterizarea minimului absolut al functionalei Φ) FunctiauF ∈ XAeste minimul absolut al functionalei
ΦF : XA → IR1, ΦF (u) =< u, u >A −2 < F, u >L2(Ω)
daca si numai daca uF este solutia ecuatiei Au = F, unde A este prelungireaFriedrichs a operatorului A.
Demonstratie: Rezultatul se obtine imediat din constructia prelungiriiFriedrichs a operatorului A.
Observatia 7.1.10 Din cele prezentate rezulta ca pentru oriceF ∈ L2(Ω) ecuatia Au = F are o singura solutie ın spatiul Hilbert XA.
Definitia 7.1.6 Solutia uF a ecuatiei Au = F se numeste solutia generali-zata a ecuatiei Au = F.

234 CAPITOLUL 7
Observatia 7.1.11 Daca uF ∈ D ⊂ XA atunci uF este solutie clasica aProblemei Dirichlet. Daca uF ∈ XA nu apartine la D (uF ∈D) atunci eaverifica doar:
∫
Ω
n∑
i=1
n∑
j=1
aij(x) ·∂uF
∂xj· ∂v∂xi
dx+
∫
Ω
c(x) · uF (x) · v(x)dx =
∫
Ω
F (x) · v(x)dx
pentru orice v ∈ XA.
In continuare vom descrie o metoda de determinare a solutiei generalizateuF a ecuatiei Au = F (despre care stim ca exista si este unica). Metoda sebazeaza pe determinarea valorilor proprii si vectorilor proprii ai prelungiriiFriedrichs A.
Definitia 7.1.7 Un numar λ este valoare proprie pentru operatorul A dacaexista o functie u ın D(A) (domeniul de definitie al operatorului A), u 6= 0,astfel ıncat sa avem:
Au = λ · u.
Teorema 7.1.9 Pentru operatorul A exista un sir infinit de valori proprii
0 < λ1 ≤ λ2 ≤ λ3 ≤ ... ≤ λm ≤ ...
si corespunzator acestor valori proprii un sir infinit de functii proprii
u1, u2, u3, ..., un, ...
cu urmatoarele proprietati:
limn→∞
λn = +∞
< ui, uj >L2(Ω) = δij .
Demonstratie: OperatorulG : L2(Ω) → L2(Ω) este liniar autoadjunct sicomplet continuu. Pe baza unei teoreme relative la aceasta clasa de operatoriliniari rezulta ca, G admite un sir infinit de valori proprii si un sir infinit defunctii proprii. Valorile proprii ale lui G le notam cu
1
λ1,
1
λ2, ...,
1
λm, ...

Ecuatia eliptica de tip divergenta si Problema Dirichlet 235
iar functiile proprii cu
u1, u2, ..., um, ...
Presupunem ca aceste valori proprii sunt aranjate ın sir astfel ca sa avem:
∣∣∣∣1
λ1
∣∣∣∣ ≥∣∣∣∣
1
λ2
∣∣∣∣ ≥ ... ≥∣∣∣∣
1
λm
∣∣∣∣ ≥ ...
iar functiile proprii sunt alese astfel ca sa avem
< ui, uj >L2(Ω)= δij .
Tinand seama de egalitatea A = G−1 rezulta ca A admite sirul de valoriproprii |λ1| ≤ |λ2| ≤ ... si sirul de functii proprii u1, u2, ..., um, ...
Aratam acum ca λm > 0 pentru orice m.Intr-adevar din G · um = 1
λm· um rezulta ca
< G · um, um >L2(Ω)=1
λm
‖um‖2L2(Ω) =
1
λm
.
Pe de alta parte,
< G · um, um >L2(Ω)=< um, um >A≥ γ‖um‖2L2(Ω)
si astfel1
λm
≥ γ‖um‖2L2Ω > 0.
Aratam acum ca, A admite chiar un sir infinit de valori proprii. La ınceputaratam ca multimea de definitie ImG a operatorului A ( formata din ele-mentele G(F ) cu F ∈ L2(Ω) ) este un spatiu vectorial infinit dimensional.Pentru aceasta, fie u o functie de clasa C∞ cu suport compact ın Ω. Con-sideram functia F = Au si observam ca u este solutia clasica a ProblemeiDirichlet
Au = F.
Rezulta ca, u este si solutie generalizata a acestei probleme, ceea ce ınseamnaca G(F ) = u. Am aratat ın acest fel ca orice functie de clasa C∞ cu suportcompact inclus ın Ω apartine multimii Im(G) si ca urmare spatiul vectorialIm(G) este infinit dimensional.

236 CAPITOLUL 7
Sa presupunem acum prin absurd ca, operatorul G are doar un numarfinit de valori proprii diferite de zero: λ1, λ2, . . . , λm. Tinand seama de faptulca G este autoadjunct si compact rezulta de aici:
G(F ) =
m∑
k=1
< G(F ), uk > uk, (∀)F ∈ L2(Ω).
Aceasta egalitate arata ca sirul u1, u2, . . . , um este baza ın Im(G) deci Im(G)este spatiu vectorial finit dimensional. Astfel, am ajuns la o contradictie sideci G admite un sir infinit de valori proprii. Incheiem demonstratia ob-servand ca lim
m→∞λm = +∞.
Teorema 7.1.10 Sirul de functii proprii umm ai operatorului A este unsir ortonormat complet ın spatiul Hilbert L2(Ω), iar sirul de functii proprii
um√λm
m
este un sir ortonormat complet ın spatiul energetic XA.
Demonstratia acestei teoreme este laborioasa si nu o facem aici.
Suntem acum ın masura sa formulam urmatoarea teorema referitoare lasolutia generalizata a ecuatiei Au = F, F ∈ L2(Ω).
Teorema 7.1.11 Oricare ar fi F ∈ L2(Ω), solutia generalizata uF a ecuatieiAu = F este data de:
uF =
+∞∑
m=1
1
λm< F, um >L2(Ω) ·um
unde umm este sirul de functii proprii ale operatorului A (A− prelungireaFriedrichs a opertorului A) ortonormal si complet ın spatiul Hilbert L2(Ω).
Demonstratie: Deoarece
uF =+∞∑
m=1
< uF , um >L2 ·um sau uF =+∞∑
m=1
< uF ,um√λm
>A · um√λm
folosind egalitatea:
< uF , v >A=< F, v >L2 , (∀)v ∈ XA
avem ca:
uF =
+∞∑
m=1
< F,um√λm
>L2 · um√λm
=
+∞∑
m=1
1
λm< F, um >L2 ·um.

Ecuatia eliptica de tip divergenta si Problema Dirichlet 237
Exercitii:
Fie Ω = (0, l1) × (0, l2) si operatorul A definit prin
Au = −(∂2u
∂x21
+∂2u
∂x22
)
pentru u ∈ D = u ∈ C2(Ω) si u|∂Ω.Determinati solutia generalizata a Problemei Dirichlet Au = F unde:a) F (x1, x2) = x1 · x2;b) F (x1, x2) = x2
1 + x22;
c) F (x1, x2) = x1 − x2;
R: Din Au = λu se obtin valorile proprii si vectorii proprii:
λm,n =
(nπ
l1
)2
+
(mπ
l2
)2
respectiv
um,n = sinnπ
l1x1 ·
mπ
l2x2.
Calculand ‖um,n‖L2 =1
2
√l1 · l2 se obtin vectorii bazei ortonormale
2√l1l2
· sin nπl1x1 · sin
mπ
l2x2
m,n
Solutia generalizata este: uF (x1, x2) =+∞∑
m=1
+∞∑
n=1
1(nπ
l1
)2
+
(mπ
l2
)2 ·
·l1∫
0
l2∫
0
(F (x1, x2) ·
2√l1l2
· sin nπl1x1 · sin
mπ
l2x2
)dx1dx2·
2√l1l2
·sin nπl1x1·sin
mπ
l2x2
unde F (x1, x2) este functia data la a), b), c).

238 CAPITOLUL 7
7.2 Problema Cauchy-Dirichlet pentru
ecuatii parabolice
Fie Ω ⊂ IRn un domeniu marginit cu frontiera ∂Ω neteda (partial neteda)si functiile reale:
aij , c, u0 : Ω → IR1, f : [0,+∞) × Ω → IR1, g : [0,+∞) × ∂Ω → IR1
cu urmatoarele proprietati:
i) aij sunt functii de clasa C1 pe Ω si aij = aji , i, j = 1, n;
c este o functie continua pe Ω, u0 este o functie continua pe Ω si declasa C2 pe Ω.
ii) exista µ0 > 0 astfel ıncat pentru orice (ξ1, . . . , ξn) ∈ IRn sa aibe locinegalitatea
n∑
i=1
n∑
j=1
aij(X) · ξi · ξj ≥ µ0
n∑
i=1
ξ2i , (∀) X ∈ Ω;
iii) c(X) ≥ 0, (∀) X ∈ Ω;
iv) f este functie continua pe [0,∞) × Ω si g este o functie continua pe[0,+∞) × ∂Ω.
Definitia 7.2.1 Problema care consta ın determinarea functiilor reale u :[0,+∞) × Ω → IR1 care au urmatoarele proprietati:
1) u este continua pe [0,+∞) × Ω, de clasa C1 pe (0,+∞) × Ω sipentru orice t ∈ (0,+∞) fixat u este de clasa C2 pe Ω.
2)∂u
∂t−
n∑
i=1
∂
∂xi
(n∑
j=1
aij(X) · ∂u∂xj
)
+c(X) · u(t, X)=f(t, X), (∀) t>0 si (∀)X ∈ Ω (7.13)
3) u(t, X) = g(t, X), (∀) (t, X) ∈ [0,+∞) × ∂Ω. (7.14)
4) u(0, X) = u0(X), (∀)x ∈ Ω. (7.15)
se numeste Problema Cauchy-Dirichlet pentru ecuatia parabolica.

Problema Cauchy-Dirichlet pentru ecuatii parabolice 239
Definitia 7.2.2 O functie u care verifica conditiile din definitia precedentase numeste solutie clasica a Problemei Cauchy-Dirichlet pentru ecuatia pa-rabolica.
Propozitia 7.2.1 Daca exista un domeniu Ω′ ⊂ IRn care include multimeaΩ si o functie G : [0,+∞) × Ω′ → IR1 de clasa C2 pe [0,+∞) × Ω′ astfelıncat
G(t, X) = g(t, X) ∀(t, X) ∈ [0,+∞) × ∂Ω,
atunci Problema Cauchy-Dirichlet neomogena pentru ecuatia parabolica, prinschimbarea de functie necunoscuta v(t, X) = u(t, X) − G(t, X) se reduce laProblema Cauchy-Dirichlet omogena pentru ecuatia parabolica:
∂v
∂t−
n∑
i=1
∂
∂xi
(n∑
j=1
aij(X) · ∂v∂xj
)+c(X) · v(t, X)=f(t, X) − ∂G
∂t+
+n∑
i=1
∂
∂xi
(n∑
j=1
aij(X) · ∂G∂xj
)− c(X) ·G(t, X), (7.16)
(∀) t)>0 si (∀)X ∈ Ω
v(t, X) = 0 (∀)(t, X) ∈ [0,+∞) × ∂Ω (7.17)
v(0, X) = u0(X) −G(0, X) (∀) X ∈ Ω. (7.18)
Demonstratie: prin verificare.
Observatia 7.2.1 Problema Cauchy-Dirichlet pentru ecuatia parabolica cuconditii pe frontiera neomogene (prezentata ın Def. 7.2.1), se reduce la oProblema Cauchy-Dirichlet pentru ecuatia parabolica cu conditii pe fron-tiera omogene. Datorita acestui fapt, vom considera ın continuare ProblemaCauchy-Dirichlet pentru ecuatia parabolica de tipul urmator:

240 CAPITOLUL 7
∂u
∂t−
n∑
i=1
∂
∂xi
(n∑
j=1
aij(X) · ∂v∂xj
)+c(X) · u(t, X)=f(t, X) (7.19)
u(t, X) = 0 (∀)(t, X) ∈ [0,+∞) × ∂Ω. (7.20)
u(0, X) = u0(X) (∀) X ∈ Ω (7.21)
ın care functiile aij , c, f au proprietatile deja prezentate: (i), (ii), (iii), (iv),iar functia u0 este continua pe Ω si de clasa C2 ın Ω.
Definitia 7.2.3 O solutie clasica a Problemei Cauchy-Dirichlet (7.19)-(7.21)este o functie u : [0,+∞)×Ω → IR1 care are urmatoarele proprietati: u estecontinua pe [0,+∞) × Ω, este de clasa C1 pe (0,+∞) × Ω si este de clasaC2 ın Ω pentru (∀)t ∈ (0,+∞), t - fixat si verifica:
∂u
∂t−
n∑
i=1
∂
∂xi
(n∑
j=1
aij(X) · ∂u∂xj
)+c(X) · u(t, X)=f(t, X)
(∀)t>0 si (∀) X ∈ Ω (7.22)
u(t, X) = 0 (∀) (t, X) ∈ [0,∞) × ∂Ω (7.23)
u(0, X) = u0(X) (∀) x ∈ Ω. (7.24)
Daca consideram operatorul diferential A definit pe spatiul de functii:
D = w|w : Ω → IR1, w ∈ C(Ω) ∩ C2(Ω) si w|∂Ω = 0,cu formula:
Aw = −n∑
i=1
∂
∂xi
(n∑
j=1
aij(X) · ∂w∂xj
)+ c(X) · w
atunci Problema Cauchy-Dirichlet (7.19)-(7.21) se scrie:
∂u
∂t+ Au = f
u(0, X) = u0.
(7.25)

Problema Cauchy-Dirichlet pentru ecuatii parabolice 241
In continuare, vom formula o problema mai generala pentru care vom demon-stra o teorema de existenta si unicitate.
Teorema 7.2.1 Daca functia u : [0,+∞) × Ω → IR1 este solutie clasica aProblemei Cauchy-Dirichlet (7.19)-(7.21), atunci functia V definita prin
V (t)(X) = u(t, X)
are urmatoarele proprietati:
a) V : [0,+∞) → L2(Ω) este continua;
b) V : (0,+∞) → L2(Ω) este de clasa C1;
c) V : (0,+∞) → XA este continua, undeXA reprezinta spatiul energetical operatorului A.
d) V (0) = u0.
e)dV
dt+ AV = F (t), (∀) t > 0 unde F (t)(X) = f(t, X).
Demonstratie:a) Fie t0 ∈ [0,+∞) si η > 0. Functia u(t, X) este uniform continua pemultimea compacta [t0 − η, t0 + η] × Ω (daca t0 = 0, atunci [0, η] × Ω).Prin urmare, (∀)ε > 0, (∃)δ(ε) > 0 astfel ca(∀)(t′, X ′), (t′′, X ′′) ∈ [t0−η, t0 +η]×Ω cu |t′−t′′| < δ(ε) si ||X ′−X ′′|| < δ(ε)sa avem:
|u(t′, X ′) − u(t′′, X ′′)| < ε/√|Ω|
unde |Ω| este masura lui Ω.Rezulta de aici ca are loc inegalitatea:
∫
Ω
|u(t, X) − u(t0, X)|2dX < ε2, (∀) t cu |t− t0| < δ(ε).
Deducem de aici ca, daca |t− t0| < δ(ε) atunci
||V (t) − V (t0)||L2(Ω) < ε.
Aceasta demonstreaza continuitatea functiei V : [0,+∞) → L2(Ω) ıntr-unpunct oarecare t0.

242 CAPITOLUL 7
b) Pentru a demonstra ca functia V : (0,+∞) → L2(Ω) este de clasa C1 seconsidera un punct t0 ∈ (0,+∞) si cu un rationament analog cu cel prezentatanterior se arata ca:
limt→t0
∫
Ω
∣∣∣∣u(t, X) − u(t0, X)
t− t0− ∂u
∂t(t0, X)
∣∣∣∣2
dX = 0
ceea ce arata ca functia V : (0,+∞) → IL2(Ω) este de clasa C1 sidV
dt+ AV = F (t).
c) pentru a demonstra ca functia V : (0,+∞) → XA este continua se con-sidera t0 ∈ (0,+∞) si se arata ca lim
t→t0||V (t) − V (t0)||XA
= 0.
d) V (0)(X) = u(0, X) = u0(X).e) s-a demonstrat ımpreuna cu (b).
Fie acum A prelungirea Friedrichs, a operatorului A definit pe D(A), F ofunctie F : [0,+∞) → L2(Ω) continua si V0 ∈ L2(Ω). Consideram problemaCauchy:
dV
dt+ AV = F (t)
V (0) = V0
(7.26)
Definitia 7.2.4 O solutie a acestei probleme este o functieV : [0,+∞) → L2(Ω) care are urmatoarele proprietati:
a) V ∈ C1((0,+∞);L2) ∩ C([0,+∞), L2)
b) V (t) ∈ D(A), (∀) t ∈ (0,+∞) sidV
dt+ AV = F (t).
c) V (0) = V0.
Definitia 7.2.5 Problema Cauchy (7.26) va fi numita problema Cauchy ab-stracta pentru ecuatia parabolica, iar o solutie a acesteia va fi numita solutie”tare” a Problemei Cauchy-Dirichlet pentru ecuatia parabolica.
Observatia 7.2.2 Daca u(t, X) este o solutie clasica a Problemei Cauchy-Dirichlet pentru ecuatia parabolica, atunci functia V definita prinV (t)(x) = u(t, X) este solutie a problemei Cauchy abstracte pentru ecuatiaparabolica.

Problema Cauchy-Dirichlet pentru ecuatii parabolice 243
Teorema 7.2.2 Problema Cauchy abstracta (7.26) pentru ecuatia parabolicaare cel mult o solutie.
Demonstratie: Fie V1, V2 doua solutii ale problemei (7.26) siV = V1 − V2. Functia V verifica
dV
dt+ AV = 0 si V (0) = 0.
Rezulta de aici egalitatea
1
2
d
dt||V ||2L2(Ω) + ||V ||2A = 0
din care rezulta inegalitatea
d
dt||V ||2L2(Ω) ≤ 0.
Functia ||V ||2L2(Ω) este pozitiva, nula pentru t = 0 si conform inegalitatii,
descreste. Rezulta ca ||V ||2L2(Ω) = 0, (∀) t ≥ 0, de unde V1 = V2.
Teorema 7.2.3 Daca functia F : [0,+∞) → L2(Ω) este de clasa C1 pe[0,+∞) atunci problema Cauchy abstracta pentru ecuatia parabolica are osolutie unica.
Demonstratie: Va trebui sa aratam doar ca problema (7.26) are solutie,unicitatea o avem deja ın baza teoremei precedente.Presupunem ca avem o solutie si, pentru t ∈ [0,+∞) o dezvoltam dupa
sistemul ortonormat complet de functii proprii (um)m∈IN ale operatorului A :
V (t) =
∞∑
m=1
< V (t), um >L2(Ω) ·um
Sirul corespunzator de valori proprii va fi notat cu 0 < λ1 ≤ λ2 ≤ · · · ≤ λm ≤. . .Procedam la fel cu F (t) si V0:
F (t) =
∞∑
m=1
< F (t), um >L2(Ω) ·um

244 CAPITOLUL 7
V0 =
∞∑
m=1
< V(0), um >L2(Ω) ·um
Notam:vm(t) =< V (t), um >L2(Ω)
fm(t) =< F (t), um >L2(Ω)
v0m(t) =< V0, um >L2(Ω)
si din ecuatiadV
dt+ AV = F (t)
si conditia initialaV (0) = V0
deducem:
dvm
dt+ λm · vm = fm, vm(0) = v0
m m = 1, 2, 3, . . . .
Aceste probleme cu date initiale au solutiile date de formula
vm(t) = v0me
−λmt +
t∫
0
e−λm(t−s) · fm(s)ds m = 1, 2, 3, . . .
de unde rezulta ca solutia V (t) a Problemei Cauchy abstracte (7.26) verificaegalitatea:
V (t) =
∞∑
m=1
v0me
−λmt · um +
∞∑
m=1
t∫
0
e−λm(t−s) · fm(s)ds
· um. (7.27)
Vom arata acum ca, daca V0 ∈ L2(Ω) si functia F : [0,+∞) → L2(Ω) estede clasa C1 pe [0,+∞), atunci membrul drept al formulei (7.27) definesteo functie V (t) care este solutie pentru problema Cauchy abstracta, adica Vare proprietatile (a), (b), (c) din Definitia (7.26).In prima etapa, trebuie demonstrata convergenta seriilor din membrul dreptal egalitatii (7.27) si examinata ”netezimea” functiilor care sunt sumele aces-tor serii.Deoarece umm este un sistem ortonormat complet ın L2(Ω), din convergen-
ta seriei numerice∞∑
m=1
|v0m|2 · e−2λmt rezulta convergenta ın L2(Ω) a seriei de

Problema Cauchy-Dirichlet pentru ecuatii parabolice 245
functii∞∑
m=1
v0m · e−λmt ·um. Seria
∞∑m=1
|v0m|2 · e−2λmt, (∀) t ≥ 0, este majorata de
seria numerica∞∑
m=1
|v0m|2 care este convergenta (V0 ∈ L2(Ω)). Rezulta astfel
ca, seria∞∑
m=1
v0m · e−λmt · um este uniform convergenta pentru orice t ≥ 0 ın
spatiul L2(Ω) si suma ei este functie continua de t.
Pentru a arata ca seria∞∑
m=1
(t∫
0
e−λm(t−s) · fm(s)ds
)· um converge ın L2(Ω)
uniform pe un segment oarecare [0, T ], procedam dupa cum urmeaza: con-
sideram seria∞∑
m=1
|t∫
0
e−λm(t−s) · fm(s)ds|2, si o majoram astfel:
∞∑m=1
∣∣∣∣∣∣
t∫
0
e−λm(t−s) ·fm(s)ds
∣∣∣∣∣∣
2
≤
≤∞∑
m=1
t∫
0
e−2λm(t−s)ds·∫ t
0
f 2m(s)ds=
=
∞∑
m=1
e−2λmt · 1
2λme−2λms
∣∣∣∣t
0
·t∫
0
f 2mds =
=
∞∑
m=1
(1
2λm− 1
2λme−2λmt
)·
t∫
0
f 2m(s)ds =
=∞∑
m=1
1
2λm(1 − e−2λmt) ·
t∫
0
f 2m(s)ds ≤
≤∞∑
m=1
1
2λ1
t∫
0
f 2m(s)ds =
1
2λ1
∞∑
m=1
t∫
0
f 2m(s)ds.
seria∞∑
m=1
f 2m(s) converge pentru orice s ∈ [0, T ] iar functiile sunt continue
si pozitive si suma seriei∞∑
m=1
f 2m(s) = ||F (s)||2 este functie continua. Con-

246 CAPITOLUL 7
form teoremei lui Dini rezulta ca, seria∞∑
m=1
f 2m(s) converge pe [0, T ] , de unde
rezulta convergenta uniforma a seriei∞∑
m=1
t∫0
|fm(s)|2 ds pe [0, T ]. Se obtine de
aici ca seria∞∑
m=1
(t∫
0
e−λm(t−s)fm(s)ds
)um este convergenta ın L2(Ω) uniform
ın raport cu t ∈ [0, T ] si suma ei este functie continua de t.Am obtinut ın acest fel ca, functia V (t) definita de (7.27) este functie con-tinua de la [0,+∞) la L2(Ω).
Vom arata ın continuare ca V : (0,+∞) → L2(Ω) este functie de clasaC1. Aceasta rezulta din convergenta uniforma pe [t0,+∞) (cu 0 < t0 < Toarecare) a seriilor
∞∑
m=1
v0me
−λmtum
si∞∑
m=1
(t∫
0
e−λm(t−s)fm(s)ds
)um si a seriilor obtinute din acestea prin derivare
termen cu termen.
Pentru derivata seriei∞∑
m=1
v0me
−λmtum, adica pentru seria:
−∞∑
m=1
λmv0me
−λmtum
convergenta uniforma rezulta din estimarile:
λ2m(v0
m)2e−2λmt ≤ λ2m(v0
m)2e−2λmt0 ≤ c · (v0m)2
unde c este o constanta independenta de m si t. Pentru derivata celei de adoua serii, adica pentru seria
∞∑
m=1
fm(t) − λm
t∫
0
e−λm(t−s)fm(s)ds
um
convergenta uniforma se obtine din estimarea:

Problema Cauchy-Dirichlet pentru ecuatii parabolice 247
|fm(t) − λm
t∫
0
e−λm(t−s) · fm(s)|2 =
= |fm(0)e−λmt +
t∫
0
f ′m(s)e−λm(t−s)ds|2 ≤
≤ 2|fm(0)|2e−2λ1t0 + 2t∫
0
|f ′m(s)|2ds ·
t∫0
e−2λm(t−s)ds ≤
≤ |fm(0)|2e−2λ1t0 +1
λ1
T∫
0
|f ′m(s)|2ds.
Din aceasta estimare si din ipoteza ca F ∈ C1([0,+∞), L2) rezulta convergentauniforma a seriei derivate si continuitatea sumei.Apartenenta V ∈ C1((0,+∞), L2) este acum imediata.
Pentru apartenenta V (t) ∈ D(A) daca t > 0 remarcam ca domeniul D(A)poate fi caracterizat astfel:
D(A) =
v =
∞∑
m=1
cmum|∞∑
m=1
λ2m · c2m < +∞
.
Aceasta caracterizare si rationamentele precedente arata ca:V (t) ∈ D(A), (∀) t > 0.
Verificarea egalitatilor:dV
dt+ AV = F (t) si V (0) = V0 este imediata.
Exercitiul 1Gasiti Problema Cauchy abstracta ın cazul Problemei Cauchy-Dirichlet
∂u
∂t= a2∂
2u
∂x2t > 0, x ∈ (0, l)
u(t, 0) = u(t, l) = 0u(0, x) = u0(x)
si determinati solutia ”tare”.
248 CAPITOLUL 7
Raspuns:
λk =
(kπ
l
)2
, k ∈ IN∗, uk = sinkπx
lV
u(x, t) =∞∑
k=1
ak · e−(akπl
)2·t sinkπx
lunde ak =
2
l
l∫
0
u0(x) · sinkπx
ldx
Exercitiul 2Determinati solutiile urmatoarelor Probleme Cauchy-Dirichlet:
a)
∂u
∂t= 4
∂2u
∂x2, (x, t) ∈ (0, 1) × (0,+∞)
u(0, t) = u(1, t) = 0, t ≥ 0
u(x, 0) = 3 sin 2πx, x ∈ [0, 1]
R: u(x, t) = 3 · e−16π2t · sin 2πx
b)
∂u
∂t= 4 · ∂
2u
∂x2+ e−4t sin x x ∈ (0, π) × (0,∞)
u(0, t) = u(π, t) = 0, t ≥ 0
u(x, 0) = 4 sin x · cos x, x ∈ [0, π]
R: u(x, t) = t · e−4t · sin x+ 2e−16t · sin 2x
c)
∂u
∂t=∂2u
∂x2+ x+ 1, (x, t) ∈ (0, 1) × (0,+∞)
u(0, t) = t+ 1, u(1, t) = 2t+ 1, t ≥ 0
u(x, 0) = 1, x ∈ [0, 1]
R: u(x, t) = t+ 1 + x · t

Calculul simbolic si numeric pentru ecuatii parabolice 249
7.3 Calculul simbolic si numeric al solutiei
Problemei Cauchy-Dirichlet pentru
ecuatii parabolice
Calculul simbolic al solutiei unei probleme Cauchy-Dirichlet nu poate firealizat cu functia pdsolve. In astfel de cazuri se trece la rezolvarea numerica.Pentru exemplificare, vom considera trei Probleme Cauchy-Dirichlet pentruecuatii parabolice a caror solutie o vom determina numeric folosind functiapdsolve cu sintaxa pentru calcul numeric:
pdsolve(PDE or PDE system, conds, type=numeric, other option);
ın care:
PDEorPDEsystem - ecuatia cu derivate partiale pe care dorim sao rezolvam sau sistemul de ecuatii cu derivatepartiale
conds - conditiile initiale si conditiile la limitatype = numeric - indica rezolvarea utilizand metode numericeotheroption - diferite optiuni (de ex. metoda numerica, nr.
de puncte, etc.)
Exemplul 1:
∂u
∂t(x, t) =
1
10· ∂
2u
∂x2(x, t)
u(0, t) = u(1, t) = 0
u(x, 0) = 1
Heat equation
> PDE1 :=diff(u(x,t),t)=1/10*diff(u(x,t),x,x);
PDE1 := ∂∂tu (x, t) = 1/10 ∂2
∂x2u (x, t)
> IBC1 := u(0,t)=0, u(1,t)=0, u(x,0)=1;IBC1 := u (0, t) = 0, u (1, t) = 0, u (x, 0) = 1
> pds1 := pdsolve(PDE1,IBC1,numeric);
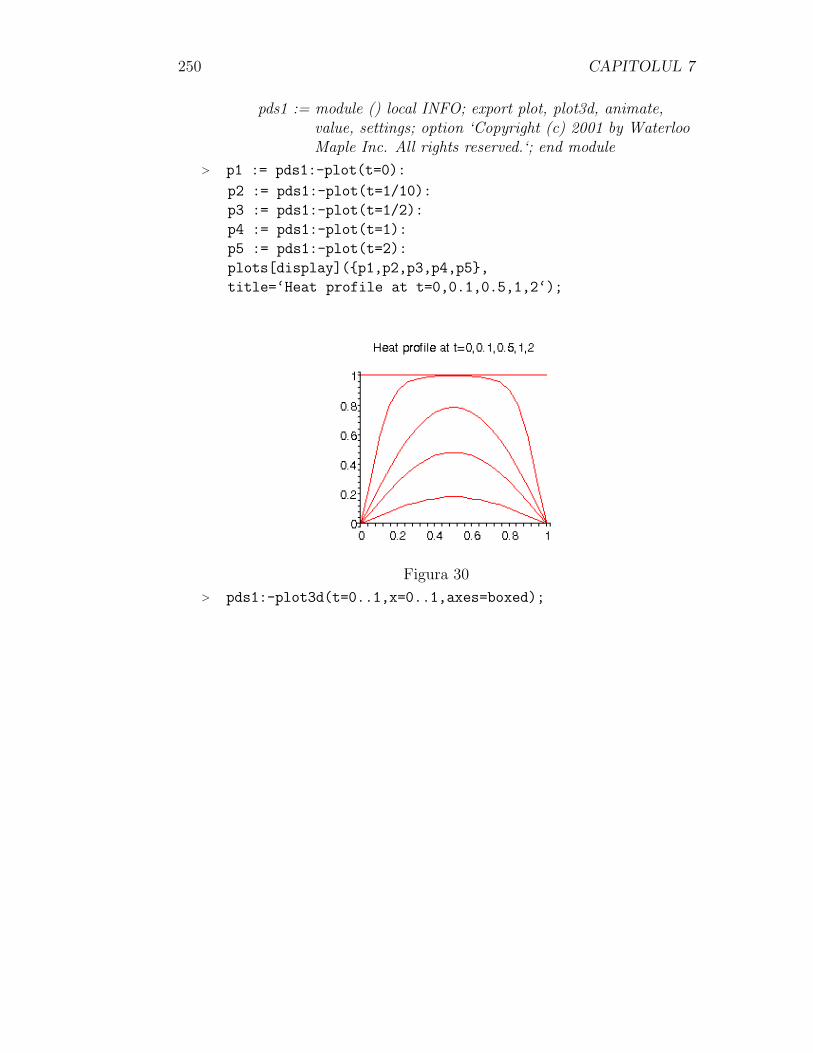
250 CAPITOLUL 7
pds1 := module () local INFO; export plot, plot3d, animate,value, settings; option ‘Copyright (c) 2001 by WaterlooMaple Inc. All rights reserved.‘; end module
> p1 := pds1:-plot(t=0):
p2 := pds1:-plot(t=1/10):
p3 := pds1:-plot(t=1/2):
p4 := pds1:-plot(t=1):
p5 := pds1:-plot(t=2):
plots[display](p1,p2,p3,p4,p5,
title=‘Heat profile at t=0,0.1,0.5,1,2‘);
Figura 30
> pds1:-plot3d(t=0..1,x=0..1,axes=boxed);
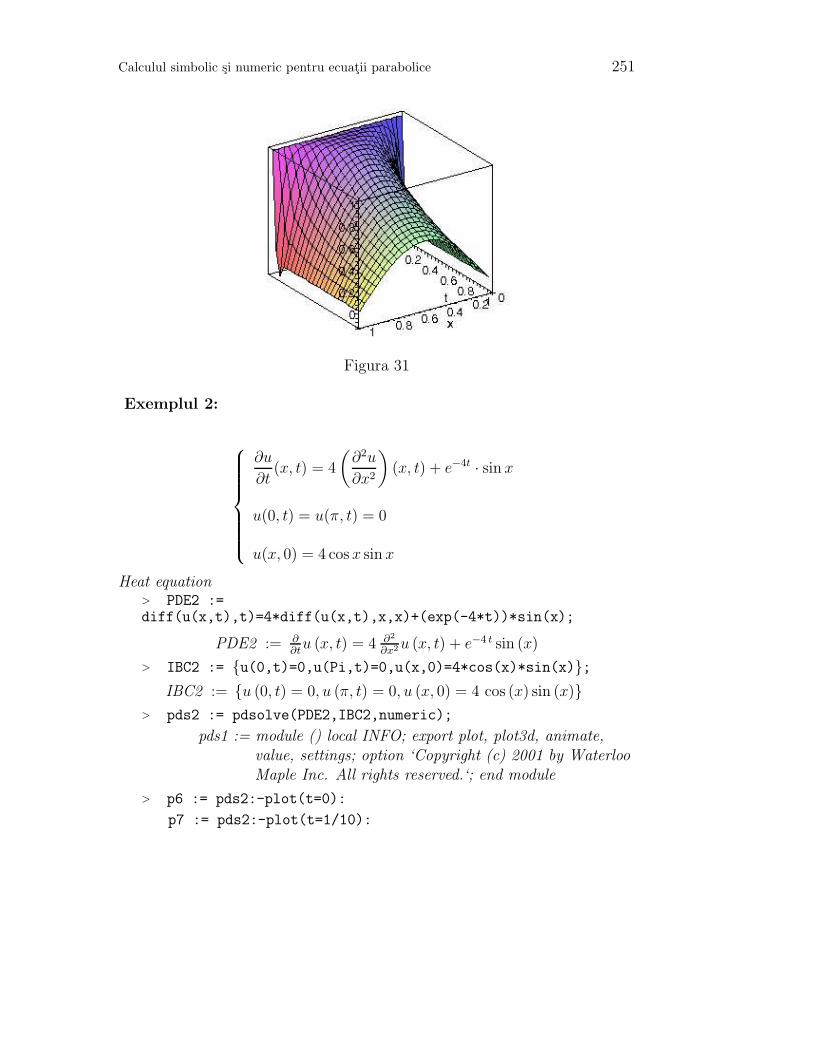
Calculul simbolic si numeric pentru ecuatii parabolice 251
Figura 31
Exemplul 2:
∂u
∂t(x, t) = 4
(∂2u
∂x2
)(x, t) + e−4t · sin x
u(0, t) = u(π, t) = 0
u(x, 0) = 4 cosx sin x
Heat equation> PDE2 :=diff(u(x,t),t)=4*diff(u(x,t),x,x)+(exp(-4*t))*sin(x);
PDE2 := ∂∂tu (x, t) = 4 ∂2
∂x2u (x, t) + e−4 t sin (x)
> IBC2 := u(0,t)=0,u(Pi,t)=0,u(x,0)=4*cos(x)*sin(x);IBC2 := u (0, t) = 0, u (π, t) = 0, u (x, 0) = 4 cos (x) sin (x)
> pds2 := pdsolve(PDE2,IBC2,numeric);
pds1 := module () local INFO; export plot, plot3d, animate,value, settings; option ‘Copyright (c) 2001 by WaterlooMaple Inc. All rights reserved.‘; end module
> p6 := pds2:-plot(t=0):
p7 := pds2:-plot(t=1/10):
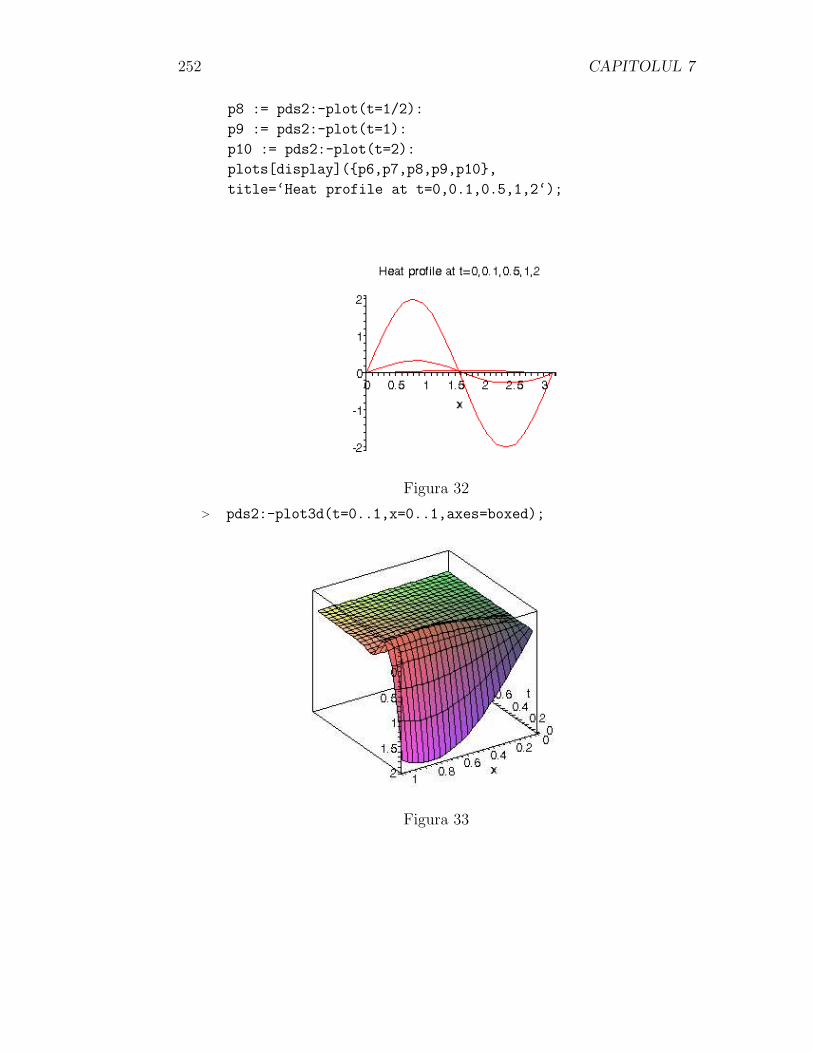
252 CAPITOLUL 7
p8 := pds2:-plot(t=1/2):
p9 := pds2:-plot(t=1):
p10 := pds2:-plot(t=2):
plots[display](p6,p7,p8,p9,p10,
title=‘Heat profile at t=0,0.1,0.5,1,2‘);
Figura 32
> pds2:-plot3d(t=0..1,x=0..1,axes=boxed);
Figura 33

Calculul simbolic si numeric pentru ecuatii parabolice 253
Exemplul 3:
∂u
∂t(x, t) =
∂2u
∂x2(x, t) + t · cosx
u(0, t) = t, u(π, t) = 0
u(x, 0) = cos 2x+ cos 3x
Heat equation> PDE3 :=diff(u(x,t),t)=diff(u(x,t),x,x)+t*cos(x);
PDE3 := ∂∂tu (x, t) = ∂2
∂x2u (x, t) + t cos (x)
> IBC3 := u(0,t)=t,u(Pi,t)=0,u(x,0)=cos(2*x)+cos(3*x);IBC3 := u (π, t) = 0, u (0, t) = t, u (x, 0) = cos (2 x) + cos (3 x)
> pds3 := pdsolve(PDE3,IBC3,numeric);
pds1 := module () local INFO; export plot, plot3d, animate,value, settings; option ‘Copyright (c) 2001 by WaterlooMaple Inc. All rights reserved.‘; end module
> q1 := pds3:-plot(t=0):
q2 := pds3:-plot(t=1/10):
q3 := pds3:-plot(t=1/2):
q4 := pds3:-plot(t=1):
q5 := pds3:-plot(t=2):
plots[display](q1,pq2,q3,q4,q5,
title=‘Heat profile at t=0,0.1,0.5,1,2‘);
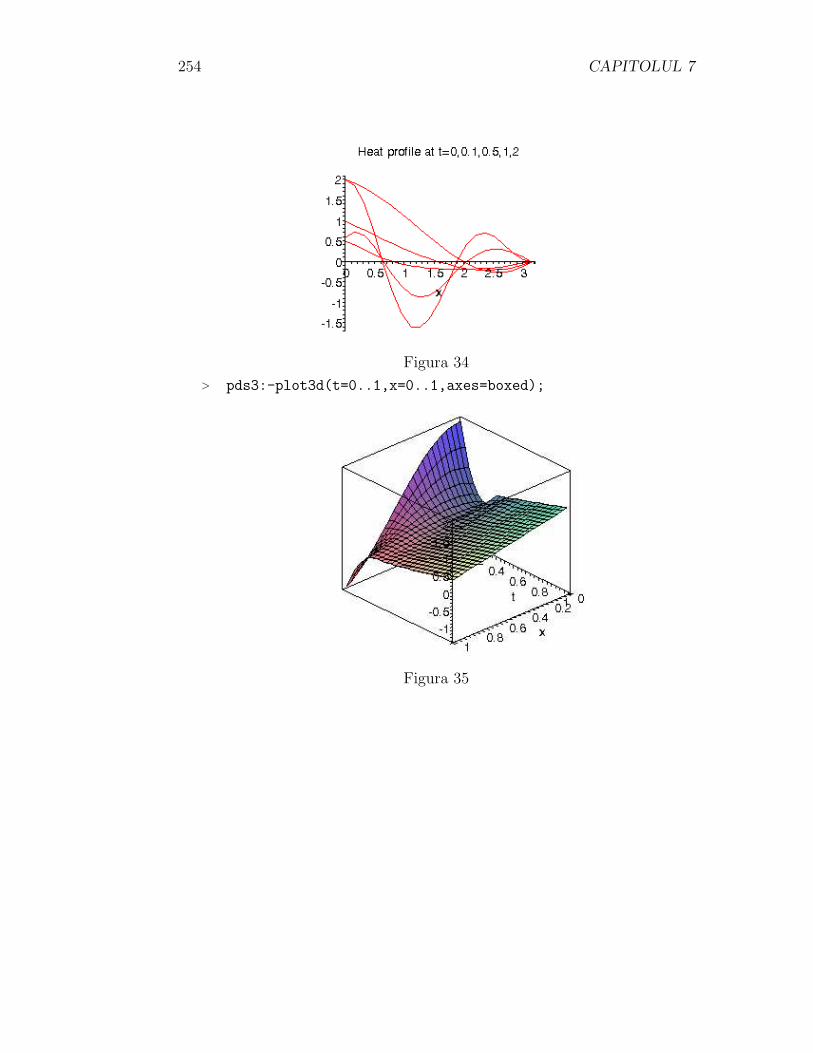
254 CAPITOLUL 7
Figura 34
> pds3:-plot3d(t=0..1,x=0..1,axes=boxed);
Figura 35

Problema Cauchy-Dirichlet pentru ecuatii hiperbolice 255
7.4 Problema Cauchy-Dirichlet pentru
ecuatii hiperbolice
Fie Ω ⊂ IRn un domeniu marginit cu frontiera ∂Ω neteda (partial neteda) sifunctiile reale aij , c, u0, u1 : Ω → IR1, f : [0,+∞) × Ω → IR1,g : [0,+∞) × ∂Ω → IR1 cu urmatoarele proprietati:
i) aij sunt functii de clasa C1 pe Ω si aij = aji, i, j = 1, n;c este continua pe Ω;u0 este de clasa C1 pe Ω si de clasa C2 pe Ω;u1 este continua pe Ω si de clasa C1 pe Ω.
ii) exista µ0 > 0 astfel ıncat pentru orice (ξ1, ξ2, . . . , ξn) ∈ IRn sa aibe locinegalitatea:
n∑
i=1
n∑
j=1
aij(X) · ξi · ξj ≥ µ0
n∑
i=1
ξ2i , (∀)X ∈ Ω
iii) c(X) ≥ 0, (∀)X ∈ Ω;
iv) functiile f : [0,+∞)×Ω → IR1 si g : [0,+∞)×∂Ω → IR1 sunt continue.
Definitia 7.4.1 Problema care consta ın determinarea functiilor reale u :[0,+∞) × Ω → IR1 continue pe [0,+∞) × Ω, de clasa C1 pe [0,+∞) × Ω side clasa C2 pe (0,+∞) × Ω, care au urmatoarele proprietati:
∂2u
∂t2−
n∑
i=1
∂
∂xi
(n∑
j=1
aij(X)· ∂u∂xj
)+ c(X)·u=f(t, X),
(∀)(t, X)∈(0,+∞)×Ω
(7.28)
u(t, X) = g(t, X), (∀)(t, X) ∈ [0,+∞) × ∂Ω. (7.29)
u(0, X) =u0(X), (∀)X ∈ Ω. (7.30)
∂u
∂t(0, X) =u1(X), (∀)X ∈ Ω. (7.31)
se numeste Problema Cauchy-Dirichlet pentru ecuatia hiperbolica.

256 CAPITOLUL 7
Definitia 7.4.2 O functie u care verifica conditiile din definitia precedentase numeste solutie clasica a Problemei Cauchy-Dirichlet pentru ecuatia hiper-bolica.
Propozitia 7.4.1 Daca exista un domeniu Ω′ ⊂ IRn care include domeniulΩ si o functie G : [0,+∞) × Ω′ → IR1 de clasa C2 pe [0,+∞) × Ω′ astfelıncat
G(t, X) = g(t, X), (∀)(t, X) ∈ (0,+∞) × ∂Ω
atunci Problema Cauchy-Dirichlet pentru ecuatia hiperbolica, prin schim-barea de functie necunoscuta v(t, X) = u(t, X)−G(t, X), se reduce la Prob-lema Cauchy-Dirichlet pentru ecuatia hiperbolica cu conditii nule pe fron-tiera:
∂2v
∂t2−
n∑
i=1
∂
∂xi
(n∑
j=1
aij ·∂v
∂xj
)+ c(X) · v(t, X) =
(7.32)
= f(t, X) − ∂2G
∂t2+
n∑
i=1
∂
∂xi
(n∑
j=1
∂G
∂xj
)− c(X) ·G(t, X),
(∀)(t, X) ∈ (0,+∞) × Ω
v(t, X) = 0, (∀)(t, X) ∈ [0,+∞) × Ω. (7.33)
u(0, X) = u0(X) −G(0, X) = v0(X), (∀)X ∈ Ω. (7.34)
∂v
∂t(0, X) = u1(X) − ∂G
∂t(0, X) = v1(X), (∀)X ∈ Ω. (7.35)
Demonstratie: Prin verificare.
Observatia 7.4.1 Propozitia reduce problema (7.28-7.31) cu conditie nenulape frontiera la problema (7.32-7.35), ın care conditia la frontiera (7.33) estezero:
v(t, X) = 0, (∀)(t, X) ∈ [0,+∞) × ∂Ω.
De aceea, vom studia existenta si unicitatea solutiei Problemei Cauchy-Dirichlet pentru ecuatia hiperbolica cu conditia la frontiera nula.

Problema Cauchy-Dirichlet pentru ecuatii hiperbolice 257
Vom considera ın continuare Probleme Cauchy-Dirichlet pentru ecuatia hiper-bolica de urmatoarea forma:
∂2u
∂t2−
n∑
i=1
∂
∂xi
(n∑
j=1
aij(X)· ∂u∂Xj
)+ c(X)·u(t, X)=f(t, X),
(7.36)
(t, X)∈(0,+∞)×Ω
u(t, X) = 0, (∀)(t, X) ∈ [0,+∞) × Ω. (7.37)
u(0, X) = u0(X), (∀)x ∈ Ω. (7.38)
∂u
∂t(0, X) = u1(X), (∀)X ∈ Ω. (7.39)
ın care functiile aij , c, f au proprietatile (i), (ii), (iii), (iv) anterior prezentate;functia u0 este de clasa C1 pe Ω si de clasa C2 ın Ω; functia u1 este continuape Ω si de clasa C1 ın Ω.O solutie clasica a acestei probleme este o functie u : [0,+∞) × Ω → IR1
care este de clasa C1 pe [0,+∞) × Ω, si este de clasa C2 pe (0,+∞) × Ω siverifica:
∂2u
∂t2−
n∑
i=1
∂
∂xi
(n∑
j=1
aij(X)· ∂u∂xj
)+ c(X)·u(t, X)=f(t, X); (t, X)∈(0,+∞)×Ω
u(t, X) = 0, (∀)(t, X) ∈ [0,+∞) × Ω.
u(0, X) = u0(X), (∀)X ∈ Ω.
∂u
∂t(0, X) = u1(X), (∀)X ∈ Ω.
Considerand operatorul diferential A definit pe spatiul de functii
D = w|w : Ω → IR1;w ∈ C(Ω) ∩ C2(Ω), w|∂Ω = 0

258 CAPITOLUL 7
cu formula
Aw = −n∑
i=1
∂
∂xi
(n∑
j=1
aij(X) · ∂w∂xj
)+ c(X) · w(X)
ecuatia hiperbolica poate fi scrisa sub forma:
∂2u
∂t2+ A · u(t, X) = f(t, X), (∀)(t, X) ∈ (0,+∞) × Ω.
Teorema 7.4.1 Daca functia u : [0,+∞) × Ω → IR1 este solutie clasica aproblemei (7.36-7.39), atunci functia U definita prin:
U(t)(X) = u(t, X)
are urmatoarele proprietati:
i) U : [0,+∞) → L2(Ω) este de clasa C1 pe [0,+∞).
ii) U : [0,+∞) → H10 este functie continua;
iii) U(0) = u0 si U ′(0) = u1.
Demonstratie:
i) Aratam la ınceput ca functia U : [0,+∞] → L2(Ω) este derivabila ınorice t0 ∈ [0,+∞). Pentru aceasta, consideram t0 ∈ [0,+∞) si apoi raportul
1
t− t0[U(t) − U(t0)] ∈ L2(Ω)
si aratam ca acest raport tinde la∂u
∂t(t0, x) ∈ L2(Ω) ın norma L2(Ω) atunci
cand t→ t0. Aceasta ınseamna ca trebuie sa aratam egalitatea:
limt→t0
∫
Ω
∣∣∣∣1
t− t0[U(t) − U(t0)] (X) − ∂u
∂t(t0, X)
∣∣∣∣2
dX = 0.
Folosind teorema cresterilor finite a lui Lagrange scriem:
1
t− t0[U(t) − U(t0)] (X) =
1
t− t0[u(t, X) − u(t0, X)] =
∂u
∂t(t(X), X)

Problema Cauchy-Dirichlet pentru ecuatii hiperbolice 259
cu |t(X) − t0| < |t− t0|.
Prin urmare are loc egalitatea:
∣∣∣∣1
t− t0[U(t) − U(t0)] (X) − ∂u
∂t(t0, X)
∣∣∣∣2
=
∣∣∣∣∂u
∂t(t(X), X) − ∂u
∂t(t0, X)
∣∣∣∣2
cu |t(X) − t0| < |t− t0|.
Functia (t, X) → ∂u
∂t(t, X) este continua pe [0,+∞) × Ω si deci este uni-
form continua pe o multime de forma [t0 − η, t0 + η] × Ω (η > 0) si prinurmare:
(∀)ε > 0, (∃)δ(ε) a.ı. (∀)(t′, X ′), (t”, X”) ∈ [t0 − η, t0 + η] × Ω
cu |t′ − t”| < δ si |X ′ −X”| < δ avem∣∣∣∣∂u
∂t(t′, X ′) − ∂u
∂t(t”, X”)
∣∣∣∣ <√
ε
|Ω| .
unde |Ω| este masura domeniului Ω. Rezulta de aici ca, daca |t− t0| < δ(ε),atunci are loc inegalitatea:
∫
Ω
∣∣∣∣1
t− t0[U(t) − U(t0)](X) − ∂u
∂t(t0, X)
∣∣∣∣2
dX < ε.
In acest fel, egalitatea
limt→t0
∫
Ω
∣∣∣∣1
t− t0[U(t) − U(t0)](X) − ∂u
∂t(t0, X)
∣∣∣∣2
dX = 0
a fost demonstrata.Va trebui ın continuare sa aratam ca functia U ′ : [0,+∞) → L2(Ω) este
continua. Aceasta revine la a demonstra egalitatea:
limt→t0
‖U ′(t) − U ′(t0)‖L2(Ω) = 0.
Pentru aceasta, vom folosi egalitatea
‖U ′(t) − U ′(t0)‖L2(Ω) =
∫
Ω
∣∣∣∣∂u
∂t(t, X) − ∂u
∂t(t0, X)
∣∣∣∣2
dX

260 CAPITOLUL 7
si faptul ca functia∂u
∂teste continua pe [0,+∞) × Ω. Din continuitatea
functiei∂u
∂trezulta ca aceasta este uniform continua pe o multime de forma
[t0 − η, t0 + η] × Ω, (y > 0) si prin urmare:
(∀)ε > 0, (∃)δ(ε) a.ı.(∀)(t′, X ′), (t”, X”) ∈ [t0 − η, t0 + η] × Ω
daca |t′ − t”| < δ si |X ′ −X”| < δ atunci∣∣∣∣∂u
∂t(t′, X ′) − ∂u
∂t(t”, X”)
∣∣∣∣ <√
ε
|Ω| .
Rezulta de aici ca, daca |t− t0| < δ(ε) avem: ‖U ′(t′) − U ′(t0)‖ < ε.ii) Sa aratam ca U ca functie cu valori ın spatiul:
H10 =
u ∈ L2(Ω)
∣∣∣∣(∃)∂u
∂xi∈ L2(Ω) si u|∂Ω = 0
este continua. Faptul ca, pentru orice t ∈ [0,+∞) functia U(t) apartinespatiului H1
0 rezulta din proprietatile solutiei u(t, X) = U(t)(X). Trebuiedoar sa evaluam norma ‖U(t) − U(t0)‖H1
0si sa aratam ca aceasta tinde la
zero daca t→ t0.Avem:
‖U(t) − U(t0)‖2H1
0
= ‖U(t) − U(t0)‖2L2(Ω) +
n∑
i=1
∥∥∥∥∂U(t)
∂xi− ∂U(t0)
∂xi
∥∥∥∥2
L2(Ω)
=
=
∫
Ω
|u(t, X) − u(t0, X)|2dX+
+
n∑
i=1
∫
Ω
∣∣∣∣∂u
∂xi(t, X) − ∂u
∂xi(t0, X)
∣∣∣∣2
dX =
=
∫
Ω
∣∣∣∣∂u
∂t(t(X), X)
∣∣∣∣2
· |t− t0|2dX+
+n∑
i=1
∫
Ω
∣∣∣∣∂2u
∂t∂xi
(t∗i (X), X)
∣∣∣∣2
· |t− t0|2dX

Problema Cauchy-Dirichlet pentru ecuatii hiperbolice 261
cu |t(X) − t0| ≤ |t− t0| si |t∗i (X) − t0| ≤ |t− t0|.Functiile
∂u
∂tsi
∂2u
∂t∂xisunt continue si prin urmare marginite pe compacte
de forma [t0 − η, t0 + η] × Ω. Rezulta de aici ca, exista o constanta pozitivaK2 > 0 astfel ca
‖U(t) − U(t0)‖2H1
0≤ K2 · |t− t0|2,
de unde se obtine continuitatea functiei U : [0,+∞) → H10 .
iii) Egalitatile: U(0) = u0 si U ′(0) = u1 sunt imediate.
Consideram ın continuare spatiul de functii S definit prin:
S = C([0,+∞);H10) ∩ C1([0,+∞);L2).
Teorema precedenta arata ca, daca u = u(t, X) este o solutie clasica a prob-lemei (7.36-7.39), atunci functia U definita prin U(t)(X) = u(t, X) apartinespatiului de functii S si verifica U(0) = u0, U
′(0) = u1.Fie T > 0 si subspatiul de functii ST definit prin:
ST = V ∈ S|V (T ) = 0
Teorema 7.4.2 Daca functia u = u(t, X) este o solutie clasica a proble-mei (7.36-7.39), atunci functia U definita prin U(t)(X) = u(t, X) apartinespatiului de functii S, verifica U(0) = u0, U
′(0) = u1 si pentru orice T > 0si orice functie V ∈ ST are loc egalitatea:
−T∫
0
< U ′(t), V ′(t) >L2(Ω) dt− < u1, V (0) >L2(Ω) +
(7.40)T∫
0
< U(t), V (t) >A dt =
T∫
0
< F (t), V (t) >L2(Ω) dt.
Demonstratie: Apartenenta functiei U la spatiul S a fost demonstrata. S-aaratat de asemenea ca U(0) = u0 si U ′(0) = u1. Ramane doar sa aratam ca

262 CAPITOLUL 7
pentru orice T > 0 si orice V ∈ ST are loc egalitatea (7.40).In acest scop, fie T > 0 si V ∈ ST . Scriind egalitatea (7.36) sub forma:
d2U(t)
dt2(X) + A · U(t)(X) = F (t)(X)
(unde F (t)(X) = f(t, X)), ınmultind aceasta egalitate cu functia V (t)(X) siintegrand pe Ω obtinem:
<d2U
dt2, V >L2(Ω) + < U(t), V (t) >A=< F (t), V (t) >L2(Ω) .
Integram acum aceasta egalitate ın raport cu t pe segmentul [0, T ], tinemseama de V (T ) = 0 si obtinem:
< U ′(t), V (t) >L2(Ω)
∣∣T0 −
T∫
0
< U ′(t), V ′(t) >L2(Ω) dt+
∫ T
0
< U(t), V (t) >A dt =
=
∫ T
0
< F (t), V (t) >L2(Ω) dt
adica:
< U ′(0), V (0) >L2(Ω) −T∫
0
< U ′(t), V ′(t) >L2(Ω) dt+
∫ T
0
< U(t), V (t) >A dt =
=
∫ T
0
< F (t), V (t) >L2(Ω) dt
ceea ce este echivalent cu:
− < u1, V (0) >L2(Ω) −T∫
0
< U ′(t), V ′(t) >L2(Ω) dt+
∫ T
0
< U(t), V (t) >A=
=
∫ T
0
< F (t), V (t) >L2(Ω) dt

Problema Cauchy-Dirichlet pentru ecuatii hiperbolice 263
Definitia 7.4.3 O functie U ∈ S se numeste solutie generalizata a problemei(7.36-7.39) daca U(0) = u0, U
′(0) = u1 si pentru (∀)T > 0, (∀)V ∈ ST
verifica:
− < u1, V (0) >L2(Ω) −T∫
0
< U ′(t), V ′(t) >L2(Ω) dt+
+
∫ T
0
< U(t), V (t) >A dt =
∫ T
0
< F (t), V (t) >L2(Ω) dt
(7.41)
Observatia 7.4.2 O solutie clasica u(t, X) a problemei (7.36-7.39) definesteo solutie generalizata a acestei probleme.
Teorema 7.4.3 Daca functia U ∈ S este solutie generalizata a problemei(7.36-7.39) si functia u : [0,+∞) × Ω → IR1 definita prin u(t, X) = U(t, X)este de clasa C2 pentru t > 0 si X ∈ Ω, atunci functia u = u(t, X) estesolutie clasica a problemei (7.36-7.39).
Demonstratie: Egalitatea (7.37):
u(t, X) = 0, (∀)t ≥ 0 si (∀)x ∈ ∂Ω
rezulta din apartenenta U(t) ∈ H10 . Egalitatea (7.38): u(0, X) = u0(0), (∀)X ∈
Ω rezulta din U(0) = u0.
Egalitatea (7.39):∂u
∂t(0, X) = u1(X), (∀)X ∈ ∂Ω rezulta din U ′(0) = u1.
Ramane doar sa aratam egalitatea (7.36) adica:
∂2u
∂t2+ A · u(t, X) = f(t, X).
Pentru a deduce aceasta egalitate pornim de la egalitatea (7.41) pe care oscriem sub forma:
−T∫
0
( ∫
Ω
∂u
∂t(t, X) · V ′(t)(X)dX
)dt−
∫
Ω
u1(X) · V (0)(X)dX+

264 CAPITOLUL 7
+
∫ T
0
(∫
Ω
A · u(t, X) · V (t)(X)dX
)dt =
T∫
0
( ∫
Ω
f(t, X) · V (t)(X)dX
)dt.
Itervertind ordinea de integrare si facand o integrare prin parti ın raport cut ın prima integrala, obtinem:
∫
Ω
T∫
0
[∂2u
∂t2+ A · u(t, X) − f(t, X)
]· V (t)(X)dt dX = 0
pentru orice V ∈ ST (am tinut seama de faptul ca V (T ) = 0).Rezulta de aici ca:
∂2u
∂t2+ A · u(t, X) = f(t, X), (∀)t > 0, (∀)X ∈ Ω.
Observatia 7.4.3 Aceasta teorema arata ca daca o solutie generalizata estesuficient de ”neteda” atunci ea este solutie clasica.
Teorema 7.4.4 (de unicitate a solutiei generalizate)Problema (7.36)-(7.39) are cel mult o solutie generalizata.
Demonstratie: Presupunem prin absurd ca problema (7.36)-(7.39) admitesolutiile generalizate U1(t) si U2(t) si consideram functia U(t) = U1(t)−U2(t).Pentru orice T > 0 si orice V ∈ ST functiile U si V verifica:
−T∫
0
< U ′(t), V ′(t) >L2(Ω) dt+
T∫
0
< U(t), V (t) >A dt = 0
Functia V definita prin V (t) =T∫t
U(τ)dτ apartine spatiilor de functii S si ST
si are urmatoarele proprietati:
V ′(t) = −U(t) si V ′′(t) = −U ′(t).
Inlocuind acestea ın relatia de mai sus rezulta ca:
T∫
0
< V ′′(t), V ′(t) >L2(Ω) dt−T∫
0
< V ′(t), V (t) >A dt = 0.
Problema Cauchy-Dirichlet pentru ecuatii hiperbolice 265
Deoarece
< V ′′(t), V ′(t) >L2(Ω)=1
2· ddt‖V ′(t)‖2
L2(Ω)
si
< V ′(t), V (t) >A=1
2· ddt‖V (t)‖2
A
egalitatea precedenta implica egalitatea:
‖V ′(T )‖2L2(Ω) − ‖V ′(0)‖2
L2(Ω) − ‖V (T )‖2A + ‖V (0)‖2
A = 0.
Tinem seama acum de egalitatile V (T ) = 0, V ′(0) = U(0) = 0 si deducemca:
‖V ′(T )‖2L2(Ω) + ‖V ′(T )‖2
A = 0,
din care rezulta V ′(T ) = 0 si V (0) = 0.Intrucat T > 0 este oarecare rezulta V ′(T ) = −U(T ) = 0. Prin urmareU1(T ) = U2(T ), (∀)T ≥ 0. Astfel, rezulta cele doua solutii generalizatecoincid.
Consecinta 7.4.1 Problema (7.36)-(7.39) are cel mult o solutie clasica.
Teorema 7.4.5 (de existenta a solutiei generalizate)Daca functia F definita prin F (T )(X) = f(t, X) este continua ca functie cuvalori ın L2(Ω) si daca u0 ∈ H1
0 , u1 ∈ L2(Ω), atunci problema (7.36)-(7.39)are o solutie generalizata.
Demonstratie: Facem demonstratia ın doua etape.In prima etapa deducem o formula de reprezentare a solutiei generalizate ınipoteza ca aceasta solutie exista.In a doua etapa aratam ca formula de reprezentare gasita ın prima etapa, ınconditiile teoremei, defineste o functie care este o solutie generalizata.
Etapa I. Presupunem ca U = U(t) este o solutie generalizata a problemei(7.36)-(7.39) si consideram sirul valorilor proprii
0 < λ1 ≤ λ2 ≤ λ3 ≤ · · · ≤ λk ≤ · · · → ∞
ai prelungirii Friedrichs A a operatoruluiA, si apoi sirul ortonormat de functiiproprii (ωk)k∈IN corespunzator, care este complet ın spatiul L2(Ω).Consideram functiile
uk(t) =< U(t), ωk >L2(Ω)

266 CAPITOLUL 7
si reprezentarea
U(t) =∞∑
k=1
uk(t) · ωk
a functiei U(t). Pentru ca U ∈ C1([0,+∞);L2(Ω)) functiile uk(t) sunt deriv-abile si au derivata continua, iar U ′(t) se reprezinta astfel:
U ′(t) =∞∑
k=1
u′k(t) · ωk.
In virtutea acestei formule de reprezentare, egalitatea (7.41) pe care o satis-face solutia generalizata U devine:
−T∫
0
+∞∑
k=1
u′k(t)· < V ′(t), ωk >L2(Ω) dt−+∞∑
k=1
u′k(0)· < V (0), ωk >L2(Ω) +
+
T∫
0
+∞∑
k=1
λk · uk(t) < V (t), ωk >L2(Ω) dt =
T∫
0
+∞∑
k=1
fk(t)· < V (t), ωk >L2(Ω) dt.
Fie acum j un numar natural oarecare fixat si functia Vj ∈ ST definita prin:
Vj(t) = (T − t) · ωj.
In egalitatea precedenta ınlocuim V cu Vj, tinem seama de egalitatile
< ωk, ωj >L2(Ω)= δkj ; V′(t) = −ωj , V (0) = T · ωj
si obtinem:
−T · < u1, ωj >L2(Ω) +
T∫
0
u′j(t)dt+ λj ·T∫
0
(T − t) · fj(t)dt =
T∫
0
(T − t)fj(t)dt
pentru j = 1, 2, . . .Derivand de doua ori ın raport cu T rezulta:
u′′j(T ) + λj · uj(T ) = fj(T ), (∀)T > 0u′j(0) =< u1, ωj >L2(Ω)
uj(0) =< u0, ωj >L2(Ω), j = 1, 2, . . .(7.42)

Problema Cauchy-Dirichlet pentru ecuatii hiperbolice 267
Problema cu datele initiale (7.42) are o singura solutie si aceasta este datade:
uj(t) =< u0, ωj >L2(Ω) · cos√λj · t+
1√λj
· < u1, ωj >L2(Ω) · sin√λj · t+
(7.43)
+1√λj
·T∫
0
fj(τ) · sin√λj · (t− τ)dτ, (∀)t ≥ 0, j = 1, 2, . . .
Astfel rezulta ca solutia generalizata U are urmatoarea reprezentare:
U(t) =
+∞∑
j=1
[< u0, ωj >L2(Ω) · cos
√λj · t+
1√λj
· < u1, ωj >L2(Ω)·sin√λj · t
]·ωj +
+
+∞∑
j=1
1√
λj
·T∫
0
fj(τ) · sin√λj · (t− τ)dτ
· ωj .
(7.44)
Etapa II Aratam acum ca, ın conditiile din teorema formula (7.44) de-fineste o functie U care apartine spatiului S si verifica (7.41) pentru T > 0.Convergentele
+∞∑
j=1
| < u0, ωj >L2 |2 < +∞ si+∞∑
j=1
| < u1, ωj >L2 |2 < +∞
implica convergenta uniforma ın raport cu t ∈ [0,+∞) ın spatiul L2(Ω) aseriei de functii:
+∞∑
j=1
[< u0, ω >L2(Ω) · cos
√λj · t+
1√λj
· < u1, ωj >L2 · sin√λj · t
]· ωj
si faptul ca suma seriei este functie continua de t cu valori ın L2(Ω).Inegalitatile:
∣∣∣∣∣∣1√λj
·T∫
0
fj(τ) · sin√λj · (t− τ)dτ
∣∣∣∣∣∣
2
≤ T
λ1
T∫
0
f 2j (τ)dτ,

268 CAPITOLUL 7
(∀)t ∈ [0, T ], j = 1, 2, . . .
precum si convergenta seriei de functii continue si pozitive+∞∑
j=1
f 2j (τ) la functia
continua ‖F (τ)‖2L2(Ω) implica convergenta uniforma ın raport cu t ∈ [0, T ]
((∀)T > 0 si T < +∞) ın L2(Ω) a seriei de functii:
+∞∑
j=1
1√λi
t∫
0
fj(τ) · sin√λj(t− τ)dτ
ωj
si faptul ca suma seriei este functie continua de t cu valori ın L2(Ω). Rezultaca, ın conditiile din teorema formula (7.44) defineste o functieU ∈ C([0,+∞);L2(Ω)).Pentru a demonstra apartenenta U ∈ C1([0,+∞);L2(Ω)) se considera seriaderivatelor:
+∞∑
j=1
[−√λj· < u0, ω >L2(Ω) · sin
√λj · t+ < u1, ωj >L2(Ω) · cos
√λj · t
]· ωj+
+∞∑
j=1
T∫
0
fj(τ) · cos(√λj) · (t− τ)dτ
ωj
si se arata ca aceasta converge uniform ın raport cu t ∈ [0, T ](T > 0si T < +∞) ın spatiul L2(Ω).
Trecem sa examinam convergenta seriei derivatelor care este de fapt o sumade trei serii.Prima dintre acestea este seria
+∞∑
j=1
−√λj · < u0, ωj >L2(Ω) · sin
√λj · t · ωj
si este uniform convergenta ın raport cu t ∈ [0,+∞) daca seria numerica:+∞∑
j=1
λj · | < u0, ωj >L2(Ω) |2 este convergenta. Aceasta din urma, poate fi

Problema Cauchy-Dirichlet pentru ecuatii hiperbolice 269
scrisa sub forma:
+∞∑
j=1
λj · | < u0, ωj >L2(Ω) |2 =+∞∑
j=1
1
λj
· λ2j · | < u0, ωj >L2(Ω) |2 =
=
+∞∑
j=1
1
λj· | < u0, ωj >A |2 =
=+∞∑
j=1
∣∣∣∣∣< u0,ωj√λj
>A
∣∣∣∣∣
2
si prin urmare este convergenta pentru ca u0 ∈ H10 .
Urmatoarea serie a carei convergenta trebuie examinata este seria+∞∑
j=1
< u1, ωj >L2(Ω) · cos√λj · t · ωj.
Aceasta serie este uniform convergenta ın raport cu t ∈ [0,+∞) daca seria
numerica+∞∑
j=1
| < u1, ωj >L2(Ω) |2 este convergenta , ceea ce este adevarat
pentru ca u1 ∈ L2(Ω).Ceea de a treia serie care trebuie examinata este seria:
+∞∑
j=1
T∫
0
fj(τ) · cos√λj · (t− τ)dτ
ωj.
Aceasta este uniform convergenta ın raport cu t ∈ (0, T ] (T > 0 siT < +∞) daca seria numerica:
+∞∑
j=1
∣∣∣∣∣∣
T∫
0
fj(τ) · cos√λj · (t− τ)dτ
∣∣∣∣∣∣
este uniform convergenta ın raport cu t ∈ [0, T ]. Datorita majorarii:
+∞∑
j=1
∣∣∣∣∣∣
T∫
0
fj(τ) · cos√λj · (t− τ)dτ
∣∣∣∣∣∣
2
≤+∞∑
j=1
T ·T∫
0
f 2j (τ)dτ

270 CAPITOLUL 7
problema se reduce la convergenta uniforma pe [0,T] a seriei+∞∑
j=1
T∫
0
f 2j (τ)dτ . Aceasta din urma convergenta se obtine din convergenta
uniforma a seriei
+∞∑
j=1
f 2j (τ)dτ pe [0,T], care rezulta pe baza teoeremei lui
Dini din continuitatea si pozitivitatea functiilor f 2j (τ), continuitatea functiei
‖F (τ)‖2 si egalitatea
+∞∑
j=1
f 2j (τ) = ‖F (τ)‖2, (∀)τ ∈ [0, T ].
In acest fel, se obtine ca formula (7.44) defineste o functieU ∈ C1([0,+∞);L2(Ω)).
Urmeaza sa aratam aparteneta U ∈ C([0,+∞);H10).
Convergenta uniforma ın raport cu t ∈ [0,+∞) a seriei
+∞∑
j=1
< u0, ωj >L2(Ω) · cos√λj · t · ωj
ın H10 poate fi asigurata prin convergenta uniforma ın raport cu t ∈ [0,+∞)
a seriei:+∞∑
j=1
√λj < u0, ωj >L2(Ω) · cos
√λj · t ·
ωj√λj
ın H10 .
Convergenta acestei serii rezulta din convergenta seriei numerice
+∞∑
j=1
λj| < u0, ωj >L2(Ω) |2,
convergenta ce este asigurata de ipoteza u0 ∈ H10 .
Convergenta uniforma ın raport cu t ∈ [0,+∞) a seriei de functii
+∞∑
j=1
1√λj
· < u1, ωj >L2(Ω) · sin√λj · t · ωj
ın spatiul H10 este asigurata de convergenta seriei
+∞∑
j=1
| < u1, ωj > |2L2(Ω),
convergenta care rezulta din apartenenta u1 ∈ L2(Ω).

Problema Cauchy-Dirichlet pentru ecuatii hiperbolice 271
In fine, convergenta uniforma ın raport cu t ∈ [0, T ] (T > 0 si T < +∞) aseriei de functii:
+∞∑
j=1
1√λj
T∫
0
fj(τ) · sin√λj · (t− τ)dτ
ωj
ın spatiul H10 este asigurata daca seria
+∞∑
j=1
T∫
0
fj(τ) · sin√λj · (t− τ)dτ
converge uniform pe [0,T]. Aceasta din urma convergenta a fost deja demon-strata.
Am obtinut ın acest fel apartenenta U ∈ C([0,+∞);H10).
Derivand acum ın raport cu t functia U data de (7.44) ca functie cuvalori ın L2(Ω), tinand seama de relatiile (7.42) se obtine ca functia U datade (7.44) este solutie generalizata a problemei (7.36)-(7.39).

272 CAPITOLUL 7
Exercitii:
Determinati solutia generalizata pentru fiecare din ProblemeleCauchy-Dirichlet de tip hiperbolic:
1.
∂2u
∂t2=∂2u
∂x2, (x, t) ∈ (0, l) × (0,+∞)
u(0, t) = u(l, t) = 0, t ≥ 0
u(x, 0) = sin4π
lx, x ∈ [0, l]
∂u
∂t(x, 0) = 0, x ∈ [0, l]
R: u(x, t) = cos4π
lt · sin 4π
lx
2.
∂2u
∂t2=∂2u
∂x2− t · sin x, (x, t) ∈ (0, π) × (0,+∞)
u(0, t) = u(π, t) = 0, t ≥ 0
u(x, 0) = 4 sinx cos x, x ∈ [0, π]
∂u
∂t(x, 0) = 2 sin 3x, x ∈ [0, π]
R: u(x, t) = (sin t− t) · sin x+ 2 cos 2t · sin 2x+
+2
3sin 3t · sin 3x
3.
∂2u
∂t2= 4
∂2u
∂x2, (x, t) ∈ (0, π) × (0,+∞)
u(0, t) = u(π, t) = 0, t ≥ 0
u(x, 0) = 2 sinx, x ∈ [0, π]
∂u
∂t(x, 0) = sin x+ sin 2x, x ∈ [0, π]
R: u(x, t) =
(2 cos 2t+
1
2sin 2t
)· sin x+
1
4sin 4t · sin 2x

Calculul simbolic si numeric pentru ecuatii hiperbolice 273
7.5 Calculul simbolic si numeric al solutiei
Problemei Cauchy-Dirichlet pentru
ecuatii hiperbolice
Deoarece pentru calculul simbolic al solutiei unei probleme Cauchy-Dirichletfunctia pdsolve nu afiseaza nimic, vom trece la rezolvarea numerica folosindfunctia pdsolve specifica calculului numeric, a carei sintaxa a fost prezentataıntr-unul din paragrafele anterioare.
Pentru exemplificare consideram urmatoarele probleme Cauchy-Dirichlet detip hiperbolic:
Exemplul 1:
∂2u
∂t2(x, t) =
∂2u
∂x2(x, t)
u(0, t) = u(1, t) = 0
u(x, 0) = x2 − x
∂u
∂t(x, 0) = 0
Wave equation
> PDE1 :=diff(u(x,t),t,t)=diff(u(x,t),x,x);
PDE1 := ∂2
∂t2u (x, t) = ∂2
∂x2u (x, t)
> IBC1 := u(0,t)=0, u(1,t)=0,u(x,0)=x^2-x, D[2](u)(x,0)=0;IBC1 := u (0, t) = 0, u (1, t) = 0, u (x, 0) = x2 − x,D2 (u) (x, 0) = 0> pds1 := pdsolve(PDE1,IBC1,numeric);
pds1 := module () local INFO; export plot, plot3d, animate,value, settings; option ‘Copyright (c) 2001 by WaterlooMaple Inc. All rights reserved.‘; end module
> p1 := pds1:-plot(t=0):
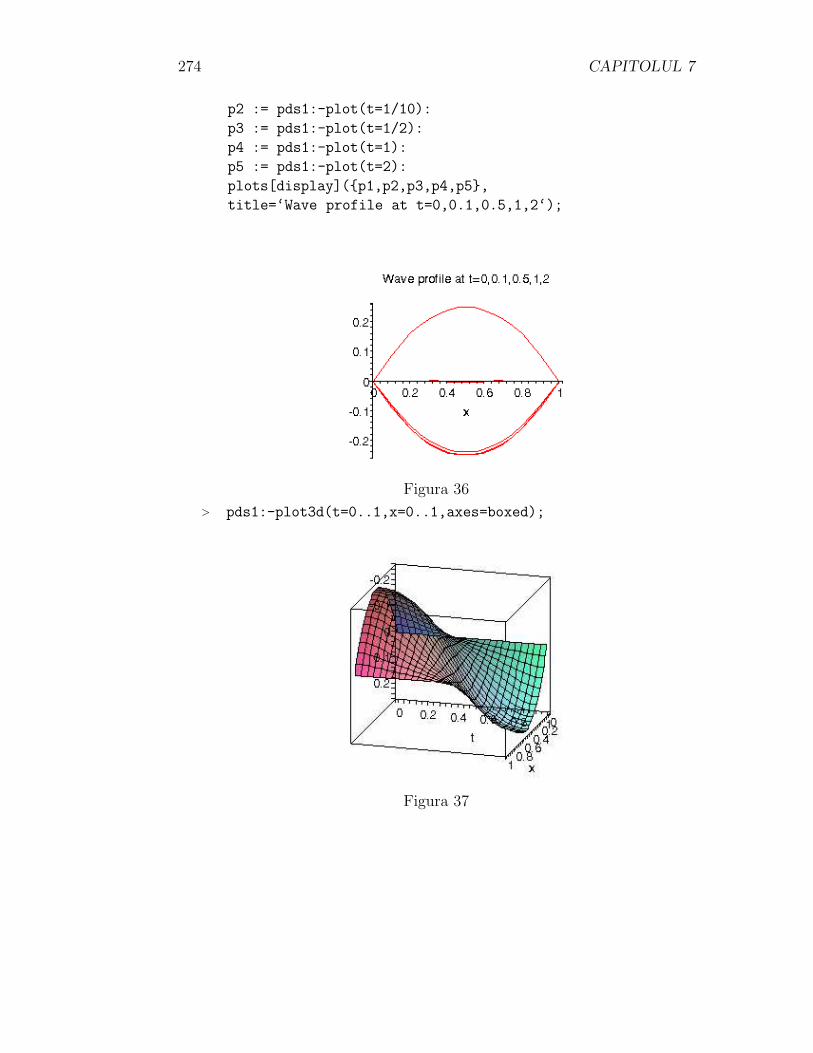
274 CAPITOLUL 7
p2 := pds1:-plot(t=1/10):
p3 := pds1:-plot(t=1/2):
p4 := pds1:-plot(t=1):
p5 := pds1:-plot(t=2):
plots[display](p1,p2,p3,p4,p5,
title=‘Wave profile at t=0,0.1,0.5,1,2‘);
Figura 36
> pds1:-plot3d(t=0..1,x=0..1,axes=boxed);
Figura 37
Calculul simbolic si numeric pentru ecuatii hiperbolice 275
Exemplul 2:
∂2u
∂t2(x, t) =
∂2u
∂x2(x, t) − t · sinx
u(0, t) = u(π, t) = 0
u(x, 0) = 4 · sinx · cosx
∂u
∂t(x, 0) = 2 · sin3x
Wave equation
> PDE2 :=diff(u(x,t),t,t)=diff(u(x,t),x,x)-t*sin(x);
PDE2 := ∂2
∂t2u (x, t) = ∂2
∂x2u (x, t) − t sin (x)
> IBC2 :=u(0,t)=0,u(Pi,t)=0,u(x,0)=4*(sin(x))*(cos(x)),D[2](u)(x,0)=2*sin(3*x);
IBC2 := u(0, t) = 0, u(π, t) = 0, u(x, 0) = 4 sin(x) cos(x),D2(u)(x, 0) = 2 sin(3 x)
> pds2 := pdsolve(PDE2,IBC2,numeric);
pds1 := module () local INFO; export plot, plot3d, animate,value, settings; option ‘Copyright (c) 2001 by WaterlooMaple Inc. All rights reserved.‘; end module
> p6 := pds2:-plot(t=0):
p7 := pds2:-plot(t=1/10):
p8 := pds2:-plot(t=1/2):
p9 := pds2:-plot(t=1):
p10 := pds2:-plot(t=2):
plots[display](p6,p7,p8,p9,p10,
title=‘Wave profile at t=0,0.1,0.5,1,2‘);
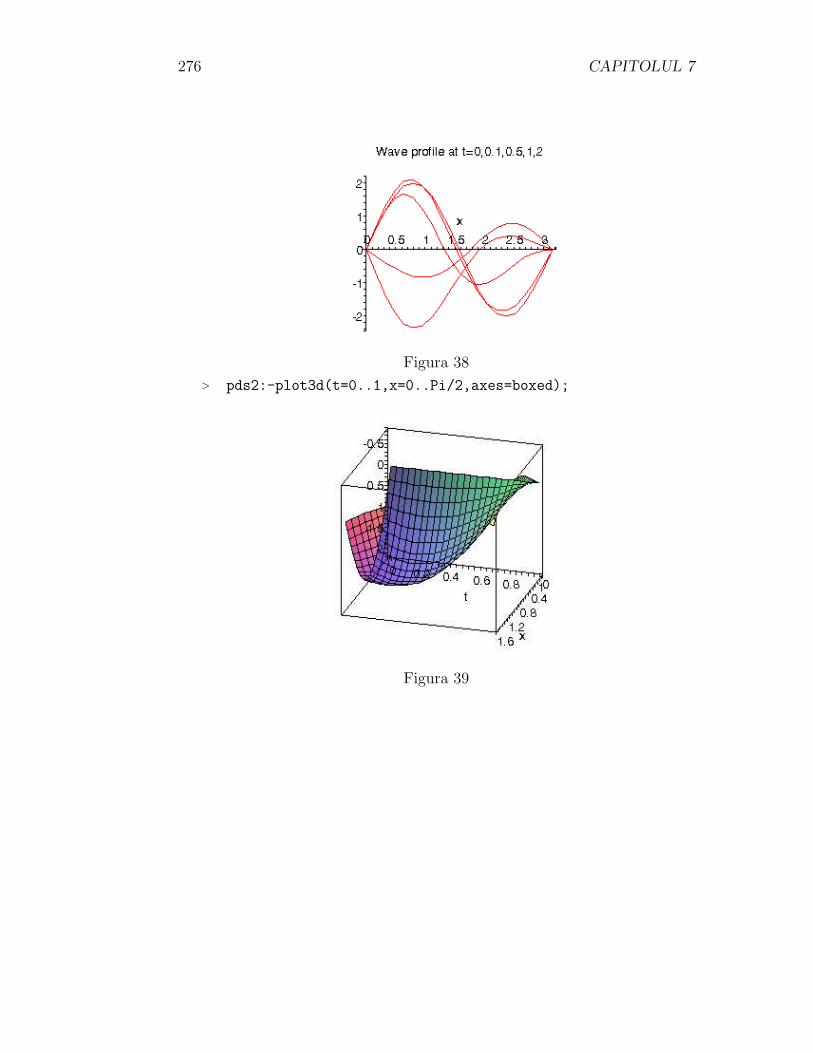
276 CAPITOLUL 7
Figura 38
> pds2:-plot3d(t=0..1,x=0..Pi/2,axes=boxed);
Figura 39
Calculul simbolic si numeric pentru ecuatii hiperbolice 277
Exemplul 3:
∂2v
∂t2(x, t) = 4 · ∂
2v
∂x2(x, t)
v(0, t) = v(π, t) = 0
v(x, 0) = 0
∂v
∂t(x, 0) = 2 · sinx
Wave equation
> PDE3 :=diff(v(x,t),t,t)=4*diff(v(x,t),x,x);
PDE2 := ∂2
∂t2v (x, t) = 4 ∂2
∂x2v (x, t)
> IBC3 :=v(0,t)=0,v(Pi/2,t)=0,v(x,0)=0,D[2](v)(x,0)=2*sin(x);
IBC3 := v (0, t) = 0, v (1/2 π, t) = 0, v (x, 0) = 0, D2 (v) (x, 0) = 2 sin (x)> pds3 := pdsolve(PDE3,IBC3,numeric);
pds1 := module () local INFO; export plot, plot3d, animate,value, settings; option ‘Copyright (c) 2001 by WaterlooMaple Inc. All rights reserved.‘; end module
> q1 := pds3:-plot(t=0):
q2 := pds3:-plot(t=1/10):
q3 := pds3:-plot(t=1/2):
q4 := pds3:-plot(t=1):
q5 := pds3:-plot(t=2):
plots[display](q1,pq2,q3,q4,q5,
title=‘Wave profile at t=0,0.1,0.5,1,2‘);
278 CAPITOLUL 7
Figura 40
> pds3:-plot3d(t=0..1,x=0..Pi/2,axes=boxed);
Figura 41
Bibliografie
[1] V.I. Arnold, Ecuatii diferentiale ordinare, Editura Stiintifica si Enciclo-pedica, Bucuresti, 1978.
[2] St. Balint, A.M. Balint, S. Birauas, C. Chilarescu, Ecuatii diferentialesi ecuatii integrale, Editura Universitatii de Vest, 2001.
[3] V.Barbu, Ecuatii diferentiale, Editura Junimea, Iasi, 1985.
[4] R. Cristescu, Elemente de analiza functionala si introducere ın teoriadistrubutiilor, Editura Tehnica, 1966.
[5] S.A. Coddington, N. Levinson, Theory of ordinary differential equations,McGraw Hill, New York, 1955.
[6] A. Corduneanu, Ecuatii diferentiale cu aplicatii ın electrotehnica, Edi-tura Facla, 1981, Timisoara
[7] C. Corduneanu, Ecuatii diferentiale si integrale, Universitatea ”Al.I.Cuza”, Iasi, 1971.
[8] G.M. Fihtenholt, Curs de calcul diferential si integral, Editura Tehnica,1964.
[9] D. Gaspar, N. Suciu, Analiza complexa, Editura Academiei Romane,1999.
[10] A. Halanay, Ecuatii diferentiale si integrale, Universitatea din Bucuresti,1971.
[11] A. Halanay, Ecuatii diferentiale, Editura Didactica si Pedagogica, Bu-curesti, 1972.
279
280 BIBLIOGRAFIE
[12] J.Ray Hanna, John H. Rowland, Fourier series, transforms, and bound-ary value problems A Wiley-Interscience Publication John Wiley andSons, Inc., 1991, USA.
[13] D. Haragus, Ecuatii cu derivate partiale, Editura Universitatii de Vest,Timisoara, 2001.
[14] A. Eckstein, D. Haragus, Exercitii standard de ecuatii cu derivatepartiale, Tipografia Universitatii de Vest din Timisoara, 2000.
[15] Ph. Hartman, Ordinary Differential Equations, J. Wiley, New York,1964.
[16] M. Hirsh, S. Smale, Differential Equations, dynamical systems and linearalgebra, Academic Press, New York, 1974.
[17] J. Hubbard, B. West, Equations differentielles et systemes dynamiques,Cassini, Paris, 1999.
[18] St. Mirica, Ecuatii diferentiale, Editura Universitatii din Bucuresti,1999.
[19] Gh. Morosanu, Ecuatii diferentiale. Aplicatii, Editura Academiei, Bu-curesti, 1989.
[20] M.Reghis, P.Topuzu, Ecuatii diferentiale ordinare, Editura Mirton,2000.
[21] E. Rogai, Exercitii si probleme de ecuatii diferentiale si integrale, Edi-tura Tehnica, 1965.
[22] N. Rouche, P. Habets, M. Laloy, Stability Theory by Liapunov directMethod, Springer, 1977.
[23] I.A. Rus, P. Pavel, Ecuatii diferentiale, Editura Didactica si Pedagogica,Bucuresti, 1982.
[24] I.A. Rus, Ecuatii diferentiale, ecuatii integrale si sisteme dinamice Casade Editura Transilvania Press, 1996.
[25] V.V. Stepanov, Curs de ecuatii diferentiale, Editura Tehnica, Bucuresti,1955.

BIBLIOGRAFIE 281
[26] M.Stoka, Culegere de probleme de functii complexe, Editura Tehnica,1965.
[27] M. Tihonov, A.A. Samarski, Ecuatiile fizicii matematice, EdituraTehnica, 1956.
[28] K. Yosida, Equations differentielles et integrales, Dunod, Paris, 1971.


















