cap 1 analiza numerica
12
PARTEA I PRINCIPIILE MATEMATICII NUMERICE ANALIZA STABILITĂŢII ŞI ERORILOR 1.1. Probleme stabile (sau bine puse) Considerăm problema: calculează x astfel încât 0 d x F , (1) unde d este mulţimea datelor de care depinde soluţia x şi F este relaţia funcţională între x şi d. În funcţie de problema particulară rezolvată, x şi d pot fi din R, din R n (vectori) sau din R mxn (matrice). Definiţia 1. Dacă F şi d sunt date (cunoscute), problema (1) se numeşte directă. Dacă F şi x sunt date, problema (1) se numeşte inversă. Dacă d şi x sunt date, problema (1) se numeşte problemă de identificare. Definiţia 2. Problem (1) se numeşte stabilă sau bine pusă dacă soluţia x este unică şi depinde continuu de datele d. Dacă problema (1) nu este stabilă, pentru rezolvarea sa numerică este necesară transformarea ei într-o problemă stabilă. Observaţie. Prin dependenţă continuă de date înţelegem faptul că perturbaţii mici ale datelor d determină modificări “mici” ale soluţiei x. Cu alte cuvinte, dacă d este perturbarea adusă datelor şi x este perturbarea indusă soluţiei şi are loc relaţia 0 d d x x F , (2) atunci, d K , 0 astfel încât d x d d d K x d , unde x . este norma pe spaţiul soluţiilor şi d . este norma pe spaţiul datelor. În continuare, pentru simplificare, vom nota ambele norme cu . , faptul că o normă este definită pe un spaţiu sau celălalt fiind înţeles din context. Exemplul 1. Fie polinomul 1 1 2 2 4 a a x a x x p . Problema 0 , a x F , unde x p a x F , nu este stabilă deoarece există o variaţie discontinuă a numărului rădăcinilor din R ale lui x p funcţie de parametrul continuu a. Evident, notând 0 2 x t , rezultă 0 1 1 2 2 a a t a t , cu soluțiile 1 1 a t și a t 2 Dacă 1 a sunt 4 soluţii distincte în R Dacă 1 a , 1 , 0 2 1 t t şi sunt 4 soluţii în R (două confundate) Dacă 1 0 a sunt 2 soluţii distincte în R Dacă 0 a sunt 2 soluţii confundate în R Altfel, problema nu are soluţii în R Observaţie. Condiţia de unicitate a soluţiei poate fi îndeplinită, dacă prin soluţie înţelegem un vector cu fiecare componentă rădăcină a polinomului (vezi exemplul 2). Pentru ca acest lucru să fie posibil trebuie ca, indiferent de date (aşa cum este formulată problema, a R), numărul rădăcinilor să rămână acelaşi. De exemplu, problema devine este stabilă pentru mulţimea datelor satisfăcând 4 a .
-
Upload
ioana-radu -
Category
Documents
-
view
67 -
download
2
description
Analiza numerica
Transcript of cap 1 analiza numerica

PARTEA I
PRINCIPIILE MATEMATICII NUMERICE
ANALIZA STABILITĂŢII ŞI ERORILOR
1.1. Probleme stabile (sau bine puse)
Considerăm problema: calculează x astfel încât
0dxF , (1)
unde d este mulţimea datelor de care depinde soluţia x şi F este relaţia funcţională între x şi d.
În funcţie de problema particulară rezolvată, x şi d pot fi din R, din Rn (vectori) sau din R
mxn
(matrice).
Definiţia 1. Dacă F şi d sunt date (cunoscute), problema (1) se numeşte directă. Dacă F
şi x sunt date, problema (1) se numeşte inversă. Dacă d şi x sunt date, problema (1) se numeşte
problemă de identificare.
Definiţia 2. Problem (1) se numeşte stabilă sau bine pusă dacă soluţia x este unică şi
depinde continuu de datele d. Dacă problema (1) nu este stabilă, pentru rezolvarea sa numerică
este necesară transformarea ei într-o problemă stabilă.
Observaţie. Prin dependenţă continuă de date înţelegem faptul că perturbaţii mici ale
datelor d determină modificări “mici” ale soluţiei x. Cu alte cuvinte, dacă d este perturbarea
adusă datelor şi x este perturbarea indusă soluţiei şi are loc relaţia
0 ddxxF , (2)
atunci,
dK , 0 astfel încât dxd
ddKxd ,
unde x
. este norma pe spaţiul soluţiilor şi d
. este norma pe spaţiul datelor.
În continuare, pentru simplificare, vom nota ambele norme cu . , faptul că o normă
este definită pe un spaţiu sau celălalt fiind înţeles din context.
Exemplul 1. Fie polinomul 112 24 aaxaxxp . Problema 0, axF ,
unde xpaxF , nu este stabilă deoarece există o variaţie discontinuă a numărului
rădăcinilor din R ale lui xp funcţie de parametrul continuu a.
Evident, notând 02 xt , rezultă
01122 aatat ,
cu soluțiile 11 at și at 2
Dacă 1a sunt 4 soluţii distincte în R
Dacă 1a , 1,0 21 tt şi sunt 4 soluţii în R (două confundate)
Dacă 10 a sunt 2 soluţii distincte în R
Dacă 0a sunt 2 soluţii confundate în R
Altfel, problema nu are soluţii în R
Observaţie. Condiţia de unicitate a soluţiei poate fi îndeplinită, dacă prin soluţie
înţelegem un vector cu fiecare componentă rădăcină a polinomului (vezi exemplul 2). Pentru
ca acest lucru să fie posibil trebuie ca, indiferent de date (aşa cum este formulată problema,
a R), numărul rădăcinilor să rămână acelaşi. De exemplu, problema devine este stabilă
pentru mulţimea datelor satisfăcând 4a .

Definiţia 3. Pentru problema (1) indicatorul de condiţie relativ este definit prin
dd
xxdK
Dd
sup
unde D este o vecinătate a originii şi desemnează setul perturbaţiilor admisibile asupra
datelor d pentru care problema perturbată (2) are sens. Dacă 0d sau 0x este definit
indicatorul de condiţie absolut, prin
d
xdK
Ddabs
sup
Definiţia 4. Problema (1) este bine condiţionată dacă dK este “mic” pentru orice
perturbaţie admisibilă.
Observaţie. Chiar dacă indicatorul de condiţie formal este infinit, problema poate fi
reformulată echivalent astfel încât să devină problemă stabilă (vezi exemplu 2).
Dacă problema (1) admite o soluţie unică, atunci există o funcţie G, numită funcţie care
rezolvă problema (“rezolvitor”), definită pe mulţimea valorilor datelor d cu valori în mulţimea
valorilor soluţiei şi astfel încât
0,, ddGFdGx (3)
Pe baza relaţiei(2), rezultă
ddGxx (4)
Dacă G este diferenţiabilă, din dezvoltarea în serie Taylor, prin aproximare de ordinul I,
obţinem,
dOddGdGddG ' , pentru 0d
ddGdGddG '
Pe baza relaţiilor (3) şi (4), obţinem,
dGddGxddGx
dd
dGddG
dd
dGdGddG
dd
xxdK
DdDdDd
'supsupsup
Observaţie. Dacă :G Rn R
m, atunci dG' este matricea Jacobian calculată în
vectorul d.
Deoarece, dacă . este norma unui vector, rezultă că funcţia x
AxA
x 0
sup
este norma
indusă pe mulţimea matricelor, obţinem,
dG
d
ddG
Dd
''
sup
şi deci
dG
ddGdK '
Similar,
dGdKabs '
Observaţie. Dacă :G Rn R
m, atunci dG' este matricea Jacobian calculată în
vectorul d.
Exemplul 2. Fie ecuaţia algebrică de gradul II,

0122 pxx , cu 1p
Deoarece 14 2 p , rădăcinile sunt 12 ppx .
În acest caz 12, 2 pxxpxF , pd şi x este vectorul Txx , . Funcţia
“rezolvitor” este,
:G RR2, TxxpG ,
TpppppG 1,1 22
Obţinem,
11
11
'
2
2
p
p
p
p
pG
Considerând 22
2,.. yx
y
x
, rezultă,
2411 22
22
2 ppppppG
1
24
11
11'
2
22
2
2
2
p
p
p
p
p
ppG
pp
Obţinem,
1
'2
p
p
pG
ppGpK
Concluzii
1. În cazul rădăcinilor bine separate (de exemplu 2p ), problema 0, pxF este
bine condiţionată.
2. În cazul rădăcinilor multiple, pentru 1p , funcţia :G RR2,
TpppppG 1,1 22 nu este diferenţiabilă, deci pK nu poate fi calculat în
funcţie de G.
În plus, dacă 1p , dar este apropiat de 1, pK are valori mari şi problema nu este
bine condiţionată. Problema poate fi reformulată într-o manieră echivalentă şi astfel încât să
devină stabilă.
Fie 11
,2
2
xt
txtxF , 0, txF , cu 12 ppt .
Evident, pt
t2
1 2
.
Cele două rădăcini sunt t
x1
, tx
1
11
2
2
pppp şi coincid pentru
1 pt . Pentru funcţia considerată, rezultă
T
tttG
1
T
ttG
2
11'
t
t
tttG
11 4
2
2
2
4
4
111'
t
t
ttG
Rezultă,
1' tG
ttGtK
deci problema este stabilă în această reprezentare.
1.2. Stabilitatea şi convergenţa metodelor numerice
Considerăm că problema (1) este stabilă. O metodă numerică pentru aproximarea
soluţiei problemei (1) este în general o secvenţă de probleme ce depind de 1n ,
1,0, ndxF nnn (5)
şi astfel încât xxn când n , adică soluţia numerică este convergentă către soluţia
exactă. Pentru aceasta trebuie ca ddn şi nF să “aproximeze” F când n .
Definiţia 5. Dacă setul de date d din (1) este admisibil pentru nF , problema numerică
(5) se numeşte consistentă dacă
0,,, dxFdxFdxF nn când n . (x este soluţia problemei 1)
O metodă se numeşte consistentă în sens tare dacă
0,,, dxFdxFdxF nn pentru orice n (nu numai dacă n ).
Definiţia 6. În cazul metodelor iterative, problema (5) are forma,
qndxxxF nqnnnn ,0,,...,, 1 (6)
cu 110 ,...,, qxxx valori date. În acest caz consistenţa în sens tare revine la verificarea
proprietăţii,
qndxxxFn ,0,,...,, (7)
Exemplul 4. Fie metoda iterativă de aproximare a rădăcinii unice a funcţiei
:f RR, dată de relaţia
1,' 1
11
n
xf
xfxx
n
nnn , 0x dat. (metoda Newton)
Conform definiţiei, metoda este consistentă în sens tare, deoarece
1,0,, nfFn , unde
1,'
,,1
111
n
xf
xfxxfxxF
n
nnnnnn
Într-adevăr,
1,0'
,, nf
ffFn
, deoarece este rădăcina funcţiei f.

Definiţia 7. O metodă numerică asociată problemei (1) este stabilă (bine pusă) dacă,
pentru orice 1n să aibă loc proprietatea,
nnnnn ddKxddK ,:,0
Similar problemei (1), pentru fiecare problemă din secvenţa (5) sunt definiţi indicatorii
nn
nn
Ddnn
dd
xxdK
nn
sup
n
n
Ddnnabs
d
xdK
nn
sup,
şi definim:
indicatorul condiţie asimptotică relativ: nnknk
nnum dKdK
suplim
indicatorul condiţie asimptotică absolut: nnabsknk
nnumabs dKdK ,suplim
Metoda numerică este bine condiţionată dacă numK este suficient de “mic” pentru toate
datele admisibile nd .
Similar problemei (1), dacă presupunem existenţa câte unei soluţii unice nx a celei de-a
n-a probleme din secvenţa (5), atunci există câte o funcţie care rezolvă problema (“rezolvitor”),
nG definită prin,
1,0,, nddGFdGx nnnnnnn
Dacă nG este diferenţiabilă, similar indicilor condiţie definiţi pentru problema (1), sunt
calculaţi indicii condiţie asimptotică prin,
nn
nnnnn
dG
ddGdK '
nnnnabs dGdK ',
Exemplul 5. Fie problema din exemplul 2 şi considerăm 1p (cazul rădăcinilor
separate). Dacă 12 ppx este evaluată direct algoritmul nu este stabil. Într-adevăr,
pentru p cu valori mari, calculul formulei
12 pp
0 deapropiat este12pp induce erori mari de calcul datorită
reprezentării aritmetice finite (vezi §1.5, situaţia subdepăşirii de domeniu). Variantele de
rezolvare a problemei de subdepăşire:
calculează 12 ppx şi, evident,
x
x1
rezolvă ecuaţia pentru domeniu ce conţine numai valoare x cu metoda Newton
1,' 1
1
1
nxf
xfxx
n
n
nn , 0x dat
1,22
12
1
1
2
11
npG
px
pxxxx n
n
nnnn

px
pxxxxpxxF
n
nnnnnn
22
12,,
1
1
2
111
px
xpG
n
nn
1
2
1
2
1
2
1
2
1
2
1'
px
xpG
n
n
n
px
p
pG
ppGpK
nn
nn
1
'
px
ppK
nknk
num
1
suplim
Dar 12
1 ppx
nn deoarece 12 ppxxn sau
12 ppxxn
Rezultă,
12
p
ppKpK num
n
deci metoda nu este bine condiţionată când 1p , altfel metoda este bine condiţionată.
Definiţia 8. Metoda numerică (5) este convergentă dacă,
nnn ddxdxndnn
nn
,,
:,,,0
00
00
unde d este setul datelor admisibile pentru (1), dx este soluţia problemei (1) şi nn ddx
este soluţia problemei (5) cu setul de date ndd .
Observaţie. Pentru a verifica proprietatea de convergenţă a metodei numerice (5) este
suficientă verificarea următoarei proprietăţi,
2
nnn ddxddx
Într-adevăr, din regula triunghiului obţinem,
2 def.2
,0
nnnn
nnnn
nnnnnn
dnKddxddxx
ddxddxddxdx
ddxddxddxdxddxdx
Prin alegerea lui nd astfel încât 2
,0
ndnK , rezultă,
nn ddxdx
Cele mai utilizate măsuri ale convergenţei şirului 1nnx sunt
eroarea absolută: nn xxxE
eroarea relativă: 0
xx
xxxE
n
nrel
dacă soluţia este vector sau matrice sunt utilizate erorile pe componente,
ji
jin
jin
c
relx
xxxE
,
,
,max
Observaţii.
1. Dacă problema (1) este bine pusă, pentru ca metoda numerică să conveargă ea
trebuie să fie stabilă.
2. Pentru orice metodă numerică cu proprietatea că este consistentă, stabilitatea este
echivalentă cu convergenţa (teorema Lax-Richtmyer)
1.3. Analiza a priori şi a posteriori a stabilităţii
Analiza stabilităţii unei metode numerice poate fi realizată a priori în una din
următoarele variante
analiza înainte (forward analysis), care furnizează o limită a variaţiei soluţiei,
nx , datorate perturbaţiei în date şi erorile intrinseci ale metodei numerice;
analiza înapoi (backward analysis), care are ca scop estimarea perturbaţiilor care
sunt aduse datelor unei probleme specificate pentru a obţine rezultatul calculat
de metodă. Cu alte cuvinte, dată fiind soluţia calculată nx̂ , scopul este de a
determina perturbaţia în setul de date, nd , astfel încât 0,ˆ nnn ddxF .
Analiza a priori poate fi utilizată şi pentru investigarea proprietăţii de convergenţă a
metodelor numerice, caz în care este referită drept analiza a priori a erorilor.
Analiza a posteriori are ca scop evaluarea erorii nxx ˆ ca funcţie a reziduurilor,
dxFr nn ,ˆ
prin intermediul unor constante numite factori de stabilitate, unde nx̂ este soluţia calculată
numeric, aproximare a lui x, soluţia problemei (1).
1.4. Surse de eroare în modelele de calcul numeric
Dacă problema numerică (5) este o aproximare a problemei matematice (1) care, la
rândul ei este modelul unei probleme reale (fizice) PP, problema (5) este numită model de
calcul al problemei PP.
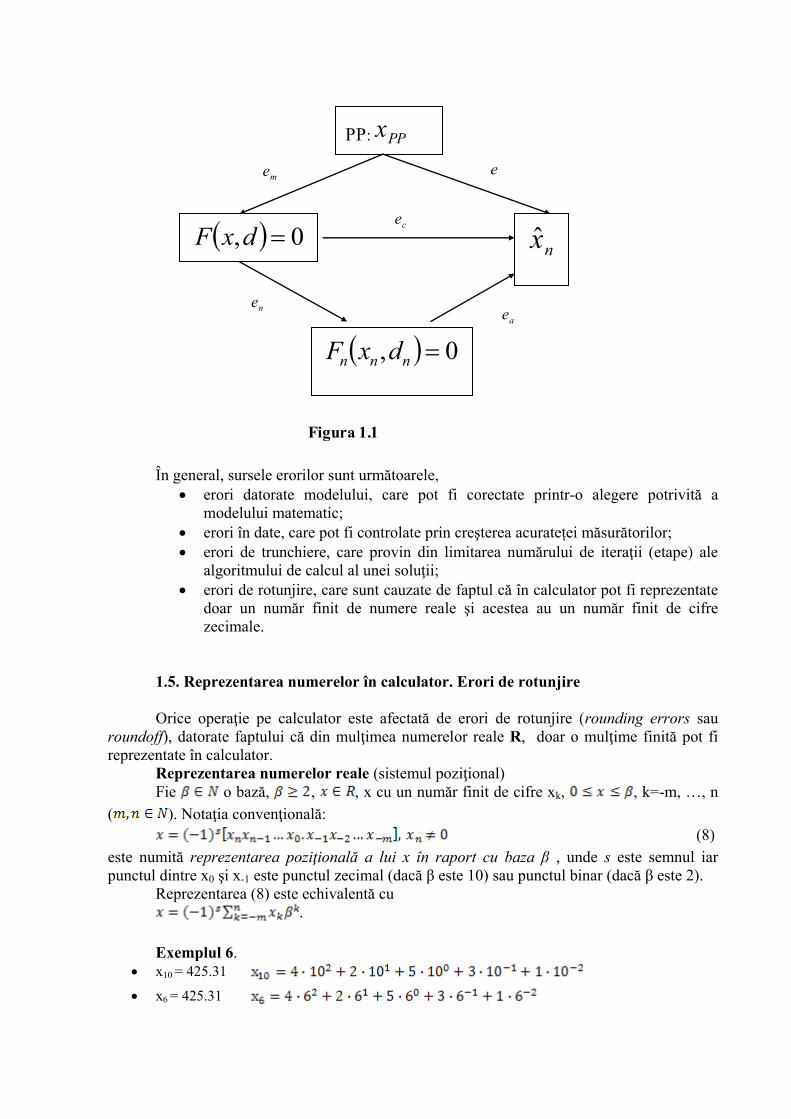
Eroarea globală, e, este definită ca diferenţa dintre soluţia calculată de modelul de
clacul (5), nx̂ , şi soluţia problemei PP, PPx modelate prin problema (1) care are soluţia x.
Eroarea globală poate fi interpretată ca cm eee , unde,
me , eroarea modelului matematic, PPm xxe
ce , eroarea modelului de calcul, xxe nc ˆ
Similar, eroarea modelului de calcul este exprimată prin suma următoarelor valori,
ae , eroarea indusă de algoritmul numeric şi erorile de calcul datorate
reprezentărilor numerelor reale în calculator (ca mulţime finită de numere cu un
număr finit de zecimale)
ne , eroarea determinată de procesul de transformare a problemei într-una
discretă, xxe nn
Situaţiile desrise mai sus sunt sintetizate în figura 1.1.
PP: PPx
nx̂
me e
ce
ne ae
Figura 1.1
0, dxF
0, nnn dxF
În general, sursele erorilor sunt următoarele,
erori datorate modelului, care pot fi corectate printr-o alegere potrivită a
modelului matematic;
erori în date, care pot fi controlate prin creşterea acurateței măsurătorilor;
erori de trunchiere, care provin din limitarea numărului de iteraţii (etape) ale
algoritmului de calcul al unei soluţii;
erori de rotunjire, care sunt cauzate de faptul că în calculator pot fi reprezentate
doar un număr finit de numere reale şi acestea au un număr finit de cifre
zecimale.
1.5. Reprezentarea numerelor în calculator. Erori de rotunjire
Orice operaţie pe calculator este afectată de erori de rotunjire (rounding errors sau
roundoff), datorate faptului că din mulţimea numerelor reale R, doar o mulţime finită pot fi
reprezentate în calculator.
Reprezentarea numerelor reale (sistemul poziţional)
Fie o bază, , , x cu un număr finit de cifre xk, , k=-m, …, n
( ). Notaţia convenţională:
(8)
este numită reprezentarea poziţională a lui x în raport cu baza β , unde s este semnul iar
punctul dintre x0 şi x-1 este punctul zecimal (dacă β este 10) sau punctul binar (dacă β este 2).
Reprezentarea (8) este echivalentă cu
.
Exemplul 6.
x10 = 425.31
x6 = 425.31

Un număr raţional poate avea un număr infinit de cifre în reprezentarea într-o bază şi un
număr finit de cifre în reprezentarea într-o altă bază. De exemplu 1/3 în baza 10 este
reprezentat ca 0.(3) iar în baza 3 reprezentarea este 0.1.
Orice număr real poate fi aproximat prin numere cu reprezentare finită. Pentru
bază finită, este îndeplinită următoarea proprietate:
(9)
unde are un număr finit sau infinit de cifre.
Fie (cu număr finit sau infinit de cifre) şi r ,
oarecare. Atunci numerele
şi
au cîte r cifre şi sînt astfel încît
şi =
Dacă r este astfel încît , atunci rezultă (9) cu sau .
Reprezentarea numerelor reale în calculator în sistem flotant (virgulă mobilă)
Dacă sînt N poziţii de memorie (biţi) alocaţi reprezentării unui număr n, atunci ei sînt
repartizaţi astfel: unul pentru semn, N-k-1 pentru partea întreagă şi k pentru partea fracţionară.
, (10)
(sistem virgulă fixă). (10) este echivalent cu
(11)
Sistemul virgulă fixă limitează valorile minime şi maxime care pot fi reprezentate, cu
excepţia situaţiilor în care N este foarte mare. Dezavantajul poate fi depăşit prin utilizarea unei
scale variabile pentru (11), obținând astfel reprezentarea în sistemul flotant sau virgulă mobilă,
astfel:
(în general şi 1 tm
obținându-se forma normalizată),
unde:
este numărul cifrelor semnificative ,
este mantisa,
este exponentul.
Fie e: (în general şi ). Cele N poziţii disponibile sînt distribuite
astfel:
1 pentru semn
t pentru mantisă
N-t-1 pentru exponent.
Pentru reprezentarea în simplă precizie se folosesc 32 biţi iar pentru reprezentarea în
dublă precizie se folosesc 64 biţi.
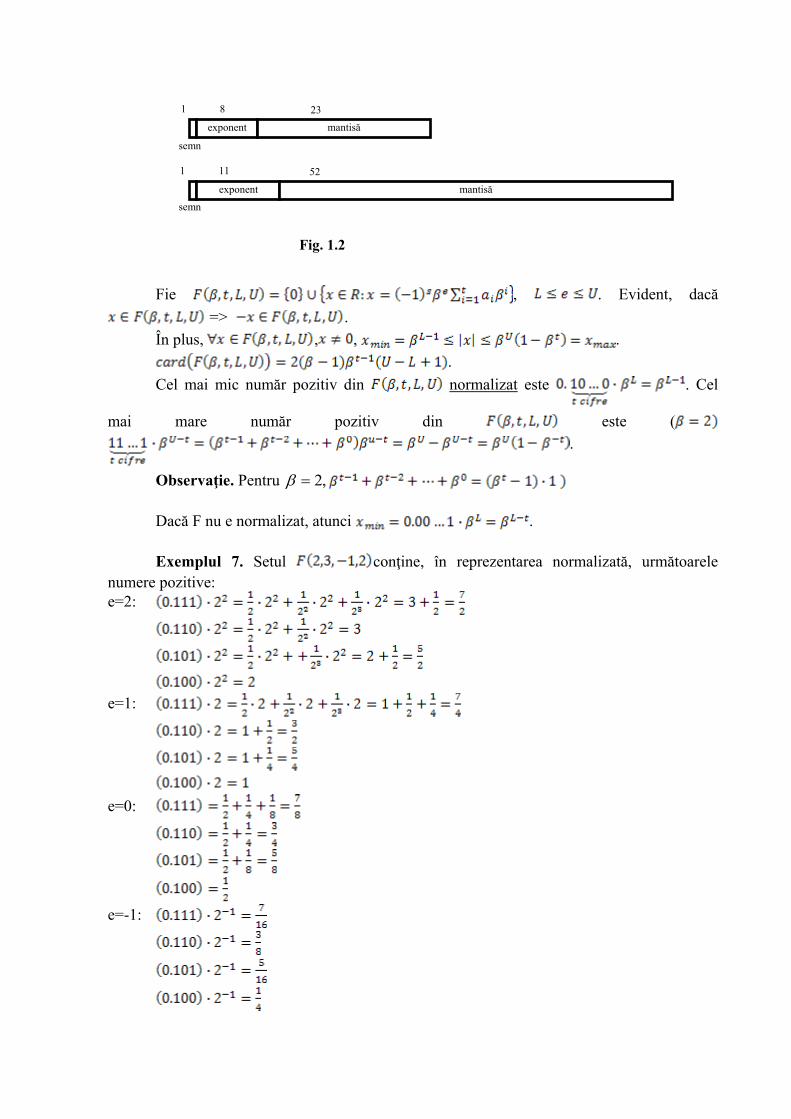
Fig. 1.2
Fie , . Evident, dacă
=> .
În plus, , , .
.
Cel mai mic număr pozitiv din normalizat este . Cel
mai mare număr pozitiv din este (
.
Observaţie. Pentru ,2
Dacă F nu e normalizat, atunci .
Exemplul 7. Setul conţine, în reprezentarea normalizată, următoarele
numere pozitive:
e=2:
e=1:
e=0:
e=-1:
exponent mantisă
exponent mantisă
1 8 23
1 11 52
semn
semn

În varianta denormalizată sînt adăugate numere pentru e=-1 (de exemplu, pentru e=2,
, deci există deja reprezentarea):
Observaţii: 1. În mulţimea numerele nu sînt egal distanţate, ele devenind mai dense către cel mai
mic număr care poate fi reprezentat.
2. Dacă , consecutive, cea mai mică distanţă posibilă este
iar cea mai mare este , unde este denumită epsilon calculată şi desemnează
distanţa între 1 şi cel mai apropiat minor din F, deci este cel mai mic număr din F cu
proprietatea că .
3. Pe intervale de tipul numerele din F sînt egal distanţate de .
4. Spre deosebire de distanţa absolută dintre două numere consecutive din F (dea descrisă la 2. şi
3.), distanţa relativă are un comportament periodic şi depinde de mantisa m.
Fie . Numărul următor se află la distanţa , deci
distanţa relativă este .
În intervalul , descreşte cu creşterea lui x (în reprezentarea normalizată
mantisa variază între şi exclusiv). Cînd x devine distanţa relativă revine la
valoarea şi reîncepe descreşterea. Fenomenul oscilatoriu este cu atît mai pronunţat cu cît
β este mai mare. Este un motiv în plus pentru care este preferat β mic.
Standardul folosit este IEC559:
simplă precizie: ,
dublă precizie:
cu includerea reprezentării denormalizate
format extins.
Rotunjirea numerelor reale în operaţii pe F
Fie (parametrii sînt fixaţi) reprezentarea numerelor reale în calculator.
Prima problemă de ordin practic este reprezentarea în F a oricărui număr real (chiar dacă
, nu rezultă că , op fiind un operator binar). În consecinţă, este necesară
definirea unei aritmetici pe F. Cea mai simplă abordare este rotunjirea numerelor. Fie în
reprezentarea normalizată (12); x este substituit cu reprezentarea ,
, unde .
Evident, 1) dacă =>
2) dacă , cu => .
Observaţii:

1. dacă , fl(x) nu este definit; dacă x este rezultatul unei operaţii se
află în situaţia depăşirii de domeniu (overflow).
2. Dacă , operaţia de rotunjire poate fi definită; dacă x este rezultatul unei
operaţii pe F se află în situaţia de subdepăşire de domeniu (underflow).
3. Dacă eroarea absolută şi eroarea relativă rezultate prin
substituirea lui x cu fl(x) este stabilită prin următorul rezultat:
, cu ,
unde ( este precizia calculatorului sau unitatea roundoff).
Obţinem:
pentru eroarea relativă ,
pentru eroarea absolută
tttt
te aaaaaaaaxflxxE ~............. 212121
. Dar
1
2121212
~.............
tttt aaaaaaaa ,
deci
.