Analiză numerică - procesarea imaginilor
20
1. Reprezentarea și caracterizarea imaginilor 1.1 Reprezentarea imaginilor Tehnicile de procesare a imaginilor digitale sunt dezvoltate pentru imagini binare (cu 2 valori posibile: alb și ne- gru), imagini monocrome și respectiv imagini color. În continuare, presupunem că imaginile sunt reprezentate prin matri- ce, fiecare element (poziție) fiind numit pixel. Proprietatea unei imagini de a fi monocromă sau color este dată de caracteristicile luminii. Dacă lumina este acromatică, singurul ei atribut este intensitatea și, în acest caz, imaginea este monocromă. Lumina cromatică este perce- pută de ochi prin intermediul a 6-7 milioane de senzori; 65% dintre ei sunt sensibili la lumina roșie, 33% la verde și 2% la albastru. Datorită acestor caracteristici de absorbție ale ochiului, culorile sunt combinații de așa-numite culori primare: roșu, verde și albastru. Culorile primare produc culorile secundare magenta (roșu + albastru), cyan (verde + albastru) și galben (roșu + verde). Modelele de sisteme de culori au ca scop obținerea unei specificări a culorilor care să poată fi stan- dardizată. În termenii procesării imaginilor digitale, modelele hardware cele mai folosite sunt: - RGB 1 pentru monitoare color și camere video, - CMY sau CMYK 2 pentru imprimarea color, - HSI 3 care corespunde îndeaproape modului în care ochiul percepe și interpretează culorile. În modelul RGB fiecare culoare este descompusă în componentele primare roșu, verde și albastru. Vom presupu- ne în continuare că valorile fiecărei componente spectrale sunt cuprinse în intervalul [] (sunt normalizate). În această ipoteză, culorile reprezintă puncte pe sau în interiorul cubului prezentat în figura Fig. 1.1. (Gonzales, Woods, 2008) Monocrom (R=G=B) R R G G B B Blue (0,0,1) Blue (0,0,1) Cyan (0,1,1) Cyan (0,1,1) Green (0,1,0) Green (0,1,0) Yellow (1,1,0) Yellow (1,1,0) Red (1,0,0) Red (1,0,0) Magenta (1,0,1) Magenta (1,0,1) Black (0,0,0) Black (0,0,0) White (1,1,1) White (1,1,1) Fig. 1.1 Spațiul culorilor În modelul CMY culorile sunt caracterizate prin componentele secundare azuriu, purpuriu, galben. Relația dintre 1 RGB – roșu, verde, albastru (Red, Green, Blue în engleză) 2 CMYK – azuriu/turcoaz, purpuriu, galben, negru (en.: Cyan, Magenta, Yellow, blacK) 3 HSI – nuanță, saturație, intensitate (en.: Hue, Saturation, Intensity)
-
Upload
nguyenkhue -
Category
Documents
-
view
290 -
download
2
Transcript of Analiză numerică - procesarea imaginilor

1. Reprezentarea și caracterizarea imaginilor
1.1 Reprezentarea imaginilor
Tehnicile de procesare a imaginilor digitale sunt dezvoltate pentru imagini binare (cu 2 valori posibile: alb și ne-
gru), imagini monocrome și respectiv imagini color. În continuare, presupunem că imaginile sunt reprezentate prin matri-
ce, fiecare element (poziție) fiind numit pixel.
Proprietatea unei imagini de a fi monocromă sau color este dată de caracteristicile luminii. Dacă lumina este
acromatică, singurul ei atribut este intensitatea și, în acest caz, imaginea este monocromă. Lumina cromatică este perce-
pută de ochi prin intermediul a 6-7 milioane de senzori; 65% dintre ei sunt sensibili la lumina roșie, 33% la verde și 2% la
albastru. Datorită acestor caracteristici de absorbție ale ochiului, culorile sunt combinații de așa-numite culori primare:
roșu, verde și albastru. Culorile primare produc culorile secundare magenta (roșu + albastru), cyan (verde + albastru) și
galben (roșu + verde). Modelele de sisteme de culori au ca scop obținerea unei specificări a culorilor care să poată fi stan-
dardizată. În termenii procesării imaginilor digitale, modelele hardware cele mai folosite sunt:
- RGB1 pentru monitoare color și camere video,
- CMY sau CMYK2 pentru imprimarea color,
- HSI3 care corespunde îndeaproape modului în care ochiul percepe și interpretează culorile.
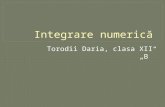
În modelul RGB fiecare culoare este descompusă în componentele primare roșu, verde și albastru. Vom presupu-
ne în continuare că valorile fiecărei componente spectrale sunt cuprinse în intervalul [ ] (sunt normalizate). În această
ipoteză, culorile reprezintă puncte pe sau în interiorul cubului prezentat în figura Fig. 1.1. (Gonzales, Woods, 2008)
Monocr
om (R
=G=B)
RR
GG
BB
Blue(0,0,1)
Blue(0,0,1)
Cyan(0,1,1)
Cyan(0,1,1)
Green(0,1,0)
Green(0,1,0)
Yellow(1,1,0)
Yellow(1,1,0)
Red(1,0,0)
Red(1,0,0)
Magenta(1,0,1)
Magenta(1,0,1)
Black(0,0,0)
Black(0,0,0)
White(1,1,1)
White(1,1,1)
Fig. 1.1 Spațiul culorilor
În modelul CMY culorile sunt caracterizate prin componentele secundare azuriu, purpuriu, galben. Relația dintre
1 RGB – roșu, verde, albastru (Red, Green, Blue în engleză)
2 CMYK – azuriu/turcoaz, purpuriu, galben, negru (en.: Cyan, Magenta, Yellow, blacK)
3 HSI – nuanță, saturație, intensitate (en.: Hue, Saturation, Intensity)

2 Tehnici de procesarea imaginilor
reprezentarea RGB și reprezentarea CMY este următoarea:
[
] [ ] [
]
( )
Conform relației (1.1), în sistemul CMY culoarea negru este caracterizată de ( ) (punctul (0,0,0) în reprezen-
tarea RGB). În practică, dacă sunt combinate toate cele 3 culori secundare, C, M și Y, este obținută o variantă de negru
„murdar” („muddy looking”4). Pentru imprimare este adăugată o a patra culoare, negru, obținând modelul CMYK.
În modelul HSI:
- componenta H este un atribut care descrie o culoare „pură” (galben, portocaliu, roșu etc.);
- componenta S caracterizează saturația, reprezentată de cantitatea de lumină albă prezentă în culoarea „pură”
(culorile pure sunt complet saturate, în timp ce restul – de exemplu culoarea roz – au un grad de saturație mai
mic, invers proporțional cu cantitatea de lumină albă prezentă în culoarea „pură” roșu);
- luminozitatea este un descriptor subiectiv și greu de măsurat în cazul imaginilor color. Ea încorporează noțiu-
nea de intensitate acromatică (I), care este descriptorul cel mai util în caracterizarea imaginilor monocrome.
Intensitatea acromatică este măsurabilă și ușor de interpretat și constituie cel de al treilea atribut al reprezentă-
rii HSI.
Reprezentarea unei culori în sistemul HSI pornind de la sistemul RGB este realizată pe baza relațiilor următoare
(Gonzales, Woods, 2008):
{
( )
{
[( ) ( )]
[( ) ( )( )]
} ( )
( ) ( )
( ) ( )
Observații
1. Valoarea indicatorului H este calculată exclusiv pentru imagini color, din care egalitatea este ex-
clusă.
2. Pentru imaginile monocrome ( pentru toți pixelii imaginii), pe baza relațiilor (1.4) și (1.5) rezultă
și .
În general, reprezentarea imaginilor este realizată în domeniul continuu. Pentru o imagine monocromă, reprezen-
tarea este realizată prin intermediul unei funcții ( ), unde ( ) aparține domeniului spațial și este variabila timp.
Pentru ( ) fixat, ( ) semnifică intensitatea luminoasă la momentul .
În cazul imaginilor color, reprezentarea este realizată în sistemul de coordonate RGB. O imagine color este repre-
zentată prin funcțiile ( ), unde pentru ( ) dat, ( ), ( ) și ( ) sunt valorile
4 muddy looking (en.) = aspect de noroi

Reprezentarea și caracterizarea imaginilor 3
în coordonate RGB la momentul .
În practică, imaginile sunt reprezentate în domeniul discret spațial prin intermediul matricelor.
O imagine digitală monocromă este o funcție bidimensională care specifică intensitatea luminii în fiecare punct:
( )
[ ( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )]
( )
unde pentru fiecare , ( ) sunt coordonatele spațiale ale punctului în imagine (pixel) și ( )
{ }, unde este numărul de niveluri de gri.
O imagine digitală color este un vector cu componente matrice, fiecare componentă indicând gradul de lumino-
zitate al fiecărui pixel ( ) în banda de culoare corespunzătoare. De exemplu, în reprezentarea RGB:
( ), unde
( ) [
( ) ( )
( ) ( )
]
( ) [
( ) ( )
( ) ( )
]
( ) [
( ) ( )
( ) ( )
]
( )
1.2 Caracterizarea matematică a imaginilor digitale
Tehnicile de procesare a imaginilor digitale implică atât procesări în cazul 2-D, situație în care este utilizată re-
prezentarea matriceală conform relațiilor (1.6) și (1.7), cât și procesări uni-dimensionale. În cea de a doua situație, întâlni-
tă în special atunci când imaginile sunt privite ca realizări ale unor procese aleatoare, imaginile sunt reprezentate ca vec-
tori obținuți prin liniarizarea matricei / matricelor din reprezentarea 2-D standard. Transformarea poate fi efectuată prin
liniarizarea la nivel de coloană, respectiv linie. În continuare desemnează reprezentarea matriceală a unei imagini mo-
nocrome/una din componentele unei imagini color în reprezentarea RGB. (Pratt, 2007)
Liniarizarea la nivel de coloană
Pentru (coloană)
a) Fie [ ] (1 pe poziția m) vector cu M elemente.

4 Tehnici de procesarea imaginilor
[ ( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )]
[ ]
[
( )
( )
( )
] ( )
Vectorul reprezintă cea de a m-a coloană din .
b) Fie matrice cu linii și coloane.
[
]
( )
unde este o matrice pătrată de ordin cu toate elementele 0, iar este matricea unitate de ordin .
( )
[ ( )
( )
( )
( )
( )]
[
]
( )
deci este un vector cu elemente ( secvențe de câte elemente) în care doar cel de al -lea segment este
nenul și egal cu coloana din .
Matricea liniarizată pe coloane este
∑
( ) ( )
unde este un vector cu elemente ( secvențe de câte elemente), fiecare secvență fiind, în ordine, o coloană
din .
Evident, transformarea inversă este
∑
Liniarizarea la nivel de linie
Pentru (linie)
a) Fie [ ] (1 pe poziția n) vector cu N elemente.

Reprezentarea și caracterizarea imaginilor 5
[ ]
[ ( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( )]
[ ( ) ( ) ( )] ( )
vectorul linie din .
b) Fie matricea cu M linii și coloane.
[ ]
( )
unde este o matrice pătrată de ordin cu toate elementele 0, iar este matricea unitate de ordin .
[
]
[ ] ( )
deci este un vector cu elemente ( secvențe de câte elemente) în care doar cel de al -lea segment este
nenul și egal cu linia din .
Matricea liniarizată pe linii este
∑
( )
Evident, transformarea inversă este
∑
( )
1.3 Caracterizarea statistică a imaginilor
În cadrul unei clase largi de aplicații, sunt procesate seturi de imagini, nu doar cu o singură imagine (de exemplu
în analiza imaginilor provenite din radiografii, imagini din trafic etc.). Fiecare imagine din mulțime poate diferi de toate
celelalte, dar toate imaginile prezintă anumite caracteristici comune. Este intenționată determinarea acestor caracteristici
comune în scopul compresiei/decompresiei, fiecărei imagini cu eroare minimă posibilă.
Fie F un proces digital matrice (de tip imagine). Ne situăm în continuare în cazul general, cel al proceselor
stochastice complexe (pe spațiul numerelor complexe ). Valoarea medie a acestuia este matricea (Pratt, 2007)
( ) [ ( ( ))] ( )
În scrierea vectorială conform relației (1.11), se obține relația

6 Tehnici de procesarea imaginilor
( ) ∑
( ) ( )
deoarece și sunt constante cu elemente numere reale. este un vector - dimensional.
Funcția de autocorelație este dată prin
( ) ( ( ) ̅( )) ( )
unde ( ) și ( ) sunt doi pixeli și ̅( ) desemneză conjugatul valorii ( ).
Similar, funcția de covarianță este definită prin
( )
([ ( ) ( ( ))]
[ ̅( ) ( ̅( ))]) ( )
În scrierea vectorială, conform relației (1.11) și Anexei 1, rezultă relația:
(
) (( ∑ (
)
)( ∑ ( (
))
))
(( ∑
( )
)( ∑ (( ))
))
∑ ∑ ((
) (( ))
)
( )
unde ( ̅) .
Matricea
((
) (( ))
) (
)
este de dimensiune și reprezintă matricea de corelație dintre coloanele și ale procesului .
Evident,
(vezi anexa 1).
În situația proceselor cu valori numere reale,
Obținem
[
] ( )
și

Reprezentarea și caracterizarea imaginilor 7
[
] ( )
matrice dimensionale (pătratice, de dimensiune ).
În cazul particular al proceselor stochastice staționare în sens larg (en.: WSS – wide-sense stationarity), atunci
media este independentă de poziție și funcția de corelație depinde exclusiv de distanța (în spațiu) dintre pozițiile conside-
rate (pixelii din imagini),
( ) [ ( ( ))] ( )
( ) ( ) ( )
În exprimarea vectorială, notând | | , pe baza relației
, obți-
nem,
{
Fiecare matrice exprimă corelația dintre doi vectori coloană , cu aflați la distanța unul față de
celălalt.
Pe baza relației (1.22), rezultă că, în cazul proceselor staționare, matricea de corelație are următoarea structură a
blocurilor
[
]
( )
Evident, în cazul proceselor staționare cu valori numere reale, rezultă
[
]
( )
O structură similară este obținută și în cazul matricelor de covarianță, utilizând relația (1.23) și proprietatea de
staționaritate.
1.4 Operații asupra imaginilor
Metodele de procesare a imaginilor fac parte din două clase primare: metode liniare și metode neliniare. (Gonza-
les, Woods, 2008)

8 Tehnici de procesarea imaginilor
Fie un operator general care, pentru o imagine de intrare ( ), produce o imagine rezultat ( ).
[ ( )] ( ) ( )
se numește liniar dacă pentru orice constante și și oricare două imagini ( ) și ( ) este adevărată
relația
[ ( ) ( )] [ ( )] [ ( )]
( ) ( ) ( )
Semnificația relației (1.29) este următoarea: rezultatul unei operații liniare asupra unei sume de imagini de intrare
este identic cu suma rezultatelor obținute prin aplicarea aceluiași operator liniar asupra fiecăreia dintre imaginile de intra-
re (aditivitate). De asemenea, prin aplicarea operatorului liniar unei imagini de intrare multiplicate cu o constantă este
obținut același rezultat ca în cazul multiplicării cu aceeași constantă a imaginii produse de aplicarea operatorului liniar
asupra imaginii de intrare (proprietate numită omogenitate).
Exemple
1. Operatorul de sumare este un operator liniar. Prin ∑[ ( )] este obținută imaginea ( ) ( ), nu suma
elementelor lui , pentru orice imagine .
Într-adevăr, pentru constantele și și imaginile ( ) și ( ):
[ ( ) ( )] ( ) ( )
( ) ( )
2. Fie [ ( )] operatorul care determină valoarea cea mai mică a unui pixel din imagine:
[ ( )]
( )
Fie [
], [
], , . Atunci:
[ ( ) ( )] [[
] [
]] [[
]]
[ ( )] [ ( )] [[
]] [[
]]
Rezultă că proprietatea (1.29) nu este îndeplinită, deci nu este un operator liniar.
Operații aritmetice asupra imaginilor
Operațiile aritmetice asupra imaginilor sunt definite la nivel de pixel. Fie ( ) și ( ) două imagini cu
și . Următorii operatori aritmetici sunt definiți asupra imaginilor și : (Gonzales, Woods, 2008)
a. Adunarea, realizată la nivel de pixel
( ) ( ) ( )
Aplicație: fie ( ) varianta perturbată cu zgomot aditiv ( ) a unei imagini inițiale ( ):

Reprezentarea și caracterizarea imaginilor 9
( ) ( ) ( ) ( )
unde este constantă iar componenta zgomot este aleatoare, necorelată și de medie 0.
În varianta vectorizată (vezi §1.2), este distribuit cu medie vectorul și matricea de covarianță
(
)
unde este varianța în componenta , ( ) , iar ( ) sunt coordonate (pixeli) ale (ai) imaginii repre-
zentate prin matrice. În continuare, în acest context, vom nota cu ( )
.
Dacă se dispune de variante perturbate ale lui cu realizări ale zgomotului notate ( ), atunci media aces-
tora, notată , este
( )
∑ ( )
și are proprietatea că
( ( ))
∑ ( ( ))
( ) ( )
În plus,
( )
( )
( )
unde, pentru o variabilă aleatoare , ( ) (( ( ) ( ( )))
) ( ).
Relațiile (1.31) și (1.32) rezultă pe baza faptului că este constantă, deci
( ) ( ( ))
( )
Dacă valoarea lui este foarte mare atunci ( ) se „apropie” de ( ) conform relației (1.31) și, pe baza re-
lației (1.32), variabilitatea zgomotului măsurată în fiecare pixel al imaginii scade. Cu alte cuvinte, dacă imaginile sunt
aliniate astfel încât să nu fie introdus efectul de blur (estompare sau efect indus de mișcare) atunci ( ) este imaginea
care aproximează suficient de bine originalul ( ), fiind realizată eliminarea (diminuarea) zgomotului.
Aplicație
Dacă este recepționat setul de imagini perturbate conform modelului (1.30), variante ale imaginii din figura Fig.
1.2 și prezentat în figura Fig. 1.3 atunci, prin operația de mediere, este obținută imaginea din figura Fig. 1.4.
Setul de imagini recepționate conține 9 imagini perturbate ale aceleiași imagini inițiale. Perturbarea este cu zgo-
mot înglobat aditiv și repartizat gaussian, necorelat. Pentru fiecare pixel, media zgomotului este 0 și varianța zgomotului
este în intervalul [ ].

10 Tehnici de procesarea imaginilor
Astfel de aplicații sunt specifice în general domeniului astronomiei, unde condițiile de captare a imaginilor induc
foarte des zgomot aditiv.
Fig. 1.2 Imaginea inițială transmisă
Fig. 1.3 Setul de imagini recepționate
IMAGINEA INITIALA

Reprezentarea și caracterizarea imaginilor 11
Fig. 1.4 Imaginea obținută prin operația de medie
b. Scăderea, realizată la nivel de pixel
( ) ( ) ( )
Acest tip de operații este folosit pentru a pune în evidență diferențele dintre imagini. Unul din domeniile în care
se aplică este cel al imagisticii medicale, în radiografia în modul mască (en.: mask mode radiography).
Fie diferențele de forma
( ) ( ) ( ) ( )
unde ( ) este masca, adică o imagine radiologică a unei zone a corpului unui pacient. Imaginea radiologică este capta-
tă prin intermediul unei camere video localizată vizavi de sursa de radiație. Procedura presupune injectarea unei substanțe
de contrast în sistemul sanguin al pacientului și captarea unei serii de imagini (numite imagini în direct, notate cu ( ))
ale aceleiași zone anatomice ca cea descrisă prin masca ( ). În continuare, prin scăderea din fiecare eșantion imagine
( ) a măștii ( ), este urmărit modul în care substanța de contrast se propagă prin diferitele vase de sânge care
vascularizează zona analizată. Efectul fiecărei operații ( ) ( ) pentru câte un eșantion ( ) este obținerea
unei imagini de ieșire, ( ), care evidențiază diferența dintre imaginea în direct (eșantionul ( )) și mască.
c. Multiplicarea și operația inversă (împărțirea) la nivel de pixel
( ) ( ) ( )
( ) ( ) ( )
Una din aplicațiile cele mai frecvente ale celor două operații este corectarea efectului de umbră. Presupunem că
un senzor produce imagini modelate în termenii produsului dintre imaginea originală ( ) și o funcție de umbrire
( ) (en.: shading function):
( ) ( ) ( )
Dacă ( ) este cunoscută, atunci ( ) poate fi obținută prin inversarea lui ( ) (adică împărțind ( )
la ( )). În caz contrar ( ) este fie estimată pe baza sistemului de captare (dacă acesta este disponibil) sau poate fi
estimată direct din imaginea disponibilă ( ).
O altă aplicație frecventă este aceea de mascare, numită și operație ROI (en.: Region Of Interest, deci operație
într-o zonă de interes predefinită). Procesul presupune multiplicarea imaginii inițiale cu o imagine mască având valori
binare: 1 în zona de interes și 0 în rest.
Operațiile spațiale de corelație și convoluție
IMAGINEA RESTAURATA

12 Tehnici de procesarea imaginilor
Corelația și convoluția spațială sunt legate de operația de filtrare spațială. (Gonzales, Woods, 2008) Un filtru spa-
țial este definit prin:
- specificarea unei vecinătăți (mască) – de obicei un pătrat de dimensiuni mici (3x3, 5x5 etc.)
- specificarea unei operații asupra pixelilor din imagine incluși în acea vecinătate.
Operația de filtrare presupune calculul unei noi valori a pixelului de coordonate egale cu cele ale centrului vecină-
tății alese. Imaginea rezultată este calculată la nivel de pixel, fiecare pixel fiind la un moment dat procesat prin „parcurge-
rea” imaginii originale cu „filtrul” centrat în acel pixel.
De exemplu, fie o mască de dimensiune 3 cu valorile următoare:
[
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )]
Masca filtrului
Masca filtrului
Pixelul (x,y)Pixelul (x,y)
Imaginea inițială
Imaginea inițială
Operația de filtrare liniară generează în imaginea următoarea valoare:
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
Se observă coeficientul centrului filtrului aliniat cu pixelul ( ).
În general, pentru o imagine de dimensiune și un filtru obținem se aplică relația:
( ) ∑ ∑ ( ) ( )
( )
unde .
Tratarea acelor zone din imagine pentru care operația (1.34) nu este definită este realizată „completând” cu câte
linii cu elemente 0 deasupra primei linii și sub ultima linie din imagine, respectiv cu câte coloane cu elemen-
te 0 în stânga primei coloane și în dreapta ultimei coloane din imagine.
Relația (1.34) definește operația de corelație a filtrului cu linii și coloane cu imaginea cu linii și
coloane. ( ) specifică centrul ferestrei de filtrare (al măștii).
( ) ( ) ( ) ∑ ∑ ( ) ( )
unde .

Reprezentarea și caracterizarea imaginilor 13
Operația de convoluție este definită prin relația
( ) ( ) ( ) ∑ ∑ ( ) ( )
( )
unde .
Exemplu
Pentru exemplificarea operațiilor de convoluție și corelație, fie imaginea și masca :
[ ]
[
]
Pas 1. Completarea cu câte 2 linii (sus și jos) și câte 2 coloane (stânga și dreapta) cu elemente nule.
0 00 0 00 0 00
0 00 0 00 0 00
0 00 0 00 0 00
0 00 0 00 0 00
0 00 0 01 0 00
0 00 0 00 0 00
0 00 0 00 0 00
0 00 0 00 0 00
0 00 0 00 0 00
fb=fb=
Imaginea inițială
Imaginea inițială
Prima poziție a lui w
Prima poziție a lui w
A doua poziție a lui w
A doua poziție a lui w
Următoarea poziție a lui
w pe coloană
Următoarea poziție a lui
w pe coloană
Pas 2.
a) Obținerea unei variante a operației de corelație prin aplicarea filtrului asupra lui (se completează cu 0 primele și
ultimele linii respectiv primele și ultimele coloane din ):
[ ]
pentru ,
( ) ( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
Analog
( ) , pentru

14 Tehnici de procesarea imaginilor
( ) , pentru
( ) , pentru
Ținând cont că singurul element cu valoarea 1 este ( ) rezultă:
( ) ( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
Similar sunt calculate și restul elementelor.
b) Obținerea unei variante a operației de convoluție prin aplicarea filtrului lui , mutându-l cu câte o poziție întâi pe
linie apoi pe coloană (se completează cu 0 primele și ultimele linii respectiv primele și ultimele coloane din
):
[ ]
pentru ,
( ) ( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
Analog
( ) , pentru
( ) , pentru
( ) , pentru
Ținând cont că singurul element cu valoarea 1 este ( ) rezultă:
( ) ( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )

Reprezentarea și caracterizarea imaginilor 15
( ) ( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
Pas 3. Eliminarea din respectiv a liniilor și coloanelor adăugate la pasul 1, obținând:
a) rezultatul corelației:
[ ]
b) rezultatul convoluției:
[ ]
Observație
Relațiile (1.34) și (1.35) rezultă pe baza următoarei dezvoltări generale bazate pe operatori de superpoziție spațial
invarianți (invarianți la translații spațiale).
Fie matricea „impulse response” (reacție la semnal primit), considerată de dimensiuni (finite sau limita-
te spațial). Operația de superpoziție în cazul unei zone finite este definită prin relația
( ) ∑∑ ( ) ( )
( )
unde limitele sumelor sunt:
{ } { }
{ } { }
Matricea are dimensiuni mai mari decât imaginea de intrare : linii și coloane.
Dacă este spațial invariantă, operația de superpoziție (1.36) se reduce la operația de convoluție:
( ) ∑∑ ( ) ( )
( )
În scopul eliminării efectelor de frontieră generate de dimensiunile lui mai mari decât cele ale lui pixelii „lip-
să” din sunt completați cu pixeli cu valori constante, cea mai des întâlnită situație fiind cea în care este completată cu
0.
Dacă este spațial invariant, operația de convoluție centrată este definită prin relația:
( ) ∑∑ ( ) ( )
( )
unde
și
, iar limitele sumelor sunt

16 Tehnici de procesarea imaginilor
{
} {
}
{
} {
}
În cele mai multe situații calculul superpoziției este limitat la
și elementele frontieră ale matricei de dimensiuni primesc valoarea 0. În această situație operația de superpoziție
este calculată ignorând frontierele lui . Operația de convoluție revine la:
( ) ∑∑ ( ) ( )
( )
Limitele de sumare în relația (1.39) sunt stabilite astfel. Dacă
rezultă
deci
{
}
și
deci
{
}
Obținem
și similar
adică limitele pentru relația (1.39).
Fie , , de unde rezultă și . Relația (1.39)
poate fi rescrisă astfel:
( ) ∑∑ ( ) ( )
( )
Limitele sumelor din (1.40) sunt stabilite astfel:
(
)
(
)
Similar rezultă că .
Rezultă relația
( ) ∑ ∑ ( ) ( )
( )
Fie
, deci
și
respectiv

Reprezentarea și caracterizarea imaginilor 17
, deci
și
Rezultă
( ) ∑ ∑ ( ) ( )
Matricea este indexată de la la pe linii și de la la pe coloane. Fie cu aceleași valori ca , dar inde-
xată cu valori de la – la pe linii și de la – la pe coloane. Rezultă că ( ) ( ),
{ }, { } și, în final
( ) ∑ ∑ ( ) ( )
cu
și
, deci relația (1.35).

18 Tehnici de procesarea imaginilor
Anexa 1
În continuare sunt prezentate câteva noțiuni elementare, necesare caracterizării statistice a unui proces imagistic
(Papoulis, Piilai, 2002).
O variabilă aleatoare este o regulă (funcție) care asociază fiecărei ieșiri a unui experiment o valoare ( ).
Un proces stochastic ( ) este o regulă care asociază fiecărui o funcție ( ), sau, echivalent, este o familie de funcții
timp care depind de parametrul . Domeniul parametrului este mulțimea tuturor rezultatelor unui experiment iar dome-
niul variabilei timp este o mulțime de numere reale . Dacă este axa numerelor reale, procesul ( ) este continuu în
variabila timp. Dacă este mulțimea numerelor întregi, ( ) este un proces discret în timp. În concluzie:
- dacă și sunt variabile, ( ) este ansamblul funcțiilor ( );
- dacă este fixat (este o constantă) și este o variabilă, ( ) este o funcție numai în variabila timp, adică un
eșantion al procesului dat;
- dacă este variabilă și este constantă, ( ) este o variabilă aleatore egală cu starea procesului dat la mo-
mentul de timp specificat, ;
- dacă și sunt constante, ( ) este o valoare.
Un proces stochastic complex ( ) ( ( ) ) este definit prin intermediul a două procese cu valori în ,
( ) ( ) ( ). Un proces vector (proces d – dimensional) este o familie de d procese stochastice. Similar poate fi
definit un proces matrice, prin liniarizare pe linii/coloane. Un proces este digital dacă variabila timp a procesului este
discretă (este cu valori în mulțimea numerelor întregi), deci este o secvență de variabile aleatoare /vectori aleatori.
Pentru un moment de timp t dat, distribuția de probabilitate a variabilei aleatoare ( ) cu valori numere reale es-
te ( ) ( ( ) ), iar densitatea de probabilitate este definită prin
( ) ( )
Media unui proces stochastic cu valori numere reale ( ) este definită prin
( ) ( ( )) ∫ ( )
Autocorelația (corelația) procesului cu valori complexe ( ) este funcția ( ) definită prin
( ) ( ) ( ( ) ̅( ))
unde ̅( ) este termenul conjugat asociat lui ( ). Evident,
( ) ̅( )
În cazul unui proces stochastic cu valori numere reale
( ) ( ) ( ( ) ( ))
( ) ( )
Autocovarianța (covarianța) procesului cu valori complexe ( ) este funcția ( ) definită prin
( ) ( ) ( ) ( ) ( )̅̅ ̅̅ ̅̅ ̅
În cazul unui proces stochastic cu valori numere reale
( ) ( ) ( ) ( ) ( )
Media unui proces stochastic vector cu valori numere complexe ( ) [ ( ) ( )] este definită prin

Reprezentarea și caracterizarea imaginilor 19
( ) ( ( )) [ ( ( )) ( ( ))]
Autocorelația (corelația) procesului ( ) cu valori numere complexe este funcția matrice ( ) definită
prin
( ) ( ) ( ( ) ( ))
unde ( ̅) .
Evident, în acest caz,
( ) ( )
În cazul procesului ( ) cu valori numere reale,
( ) ( ) ( ( ) ( ))
( ) ( )
Autocovarianța (covarianța) procesului ( ) cu valori numere complexe este funcția matrice ( ) definită
prin
( ) ( ) ( ) ( )( ( ))
În cazul procesului ( ) cu valori numere reale,
( ) ( ) ( ) ( )( ( ))
Observație. Dacă , unde [ ] este un vector aleator cu valori numere complexe, este
matrice constantă – dimensională și este un vector constant – dimensional. Atunci au loc proprietățile
( ) ( )
( ) ( ) ( ( ) )
unde ( ( ) ) ( ( ))
și
Într-adevăr,
( ) (( )( ) ) ( ) ( ) ( ( ))
( ) ( ( ) )
( ) ( ( ))
( ) ( ( ))
( ( ) )( ( ) )
( ) ( ( ))
( ) ( ( ))
( )
( ( ))
( ( ) ( ( )) ) ( ) ( ( ))

20 Tehnici de procesarea imaginilor
Fie ( ) ( ) , unde ( ) [ ( ) ( )] este un proces stochastic vector cu valori numere com-
plexe, este matrice constantă – dimensională și este un vector constant – dimensional. Atunci, prin calcule
similare celor din observația de mai sus, au loc proprietățile
( ) ( ( )) ( ( ))
( ) ( ) ( ) ( ( ))
( ) ( )
Evident, dacă este vectorul cu toate elementele nule, rezultă, pentru ( ) ( ), relațiile,
( ) ( ( )) ( ( ))
( ) ( )
( ) ( )