5. Descierea Proceselor TS Si DS
42
Procesele aleatoare nestaţionare Cronicile economice rareori sunt realizări ale proceselor aleatoare staţionare. Nonstaţionaritatea proceselor poate avea legătură atât cu momentul de prim ordin (speranţa matematică), cât şi cu cel de ordin secund (varianţa şi covarianţa procesului). În procedura Box şi Jenkins, nonstaţionaritatea este stabilită grafic (tendinţă, ciclu lung, sezonalitate explozivă, modificarea structurii…) sau chiar prin intermediul funcţiei de autocorelare şi a spectrului seriei brute (funcţia de autocorelare este lent descrescătoare, spectrul roşu…). În anii 1970-1980 nu era o analiză riguroasă, teste să permită descoperirea acestei nonstaţionarităţi. În consecinţă, transformările folosite erau filtre ale diferenţelor şi formula Box-Cox care conţinea, drept caz particular, logaritmul datelor. În aceste condiţii, deseori se întâmpla ca transformările să fie slab adaptate caracteristicilor de nonstaţionaritate, efectul fiind introducerea în cronică a mişcărilor parazitare (de exemplu artefactul Adelman observat pe spectrul unei serii filtrate prin diferenţe de ordinul I). Începând cu lucrările Nelson şi Plosser (1982), cazurile de nonstaţionaritate cele mai frecvente sunt analizate în baza a două tipuri de procese: procesele TS (Trend Stationnary) care reprezintă o nonstaţionaritate de tip determinist, procesele DS (Differency Stationnary) pentru procesele nonstaţionare aleatoare. 1
-
Upload
nelu-ciocan -
Category
Documents
-
view
45 -
download
1
description
descrierea proiectelor
Transcript of 5. Descierea Proceselor TS Si DS

Procesele aleatoare nestaţionare Cronicile economice rareori sunt realizări ale proceselor aleatoare staţionare. Nonstaţionaritatea proceselor poate avea legătură atât cu momentul de prim ordin (speranţa matematică), cât şi cu cel de ordin secund (varianţa şi covarianţa procesului). În procedura Box şi Jenkins, nonstaţionaritatea este stabilită grafic (tendinţă, ciclu lung, sezonalitate explozivă, modificarea structurii…) sau chiar prin intermediul funcţiei de autocorelare şi a spectrului seriei brute (funcţia de autocorelare este lent descrescătoare, spectrul roşu…). În anii 1970-1980 nu era o analiză riguroasă, teste să permită descoperirea acestei nonstaţionarităţi. În consecinţă, transformările folosite erau filtre ale diferenţelor şi formula Box-Cox care conţinea, drept caz particular, logaritmul datelor. În aceste condiţii, deseori se întâmpla ca transformările să fie slab adaptate caracteristicilor de nonstaţionaritate, efectul fiind introducerea în cronică a mişcărilor parazitare (de exemplu artefactul Adelman observat pe spectrul unei serii filtrate prin diferenţe de ordinul I). Începând cu lucrările Nelson şi Plosser (1982), cazurile de nonstaţionaritate cele mai frecvente sunt analizate în baza a două tipuri de procese: procesele TS (Trend Stationnary) care reprezintă o nonstaţionaritate de tip determinist, procesele DS (Differency Stationnary) pentru procesele nonstaţionare aleatoare.
1

Ele constituie, pentru cronici sezoniere sau nu, modele de referinţă pentru construirea testelor de rădăcină unitară în absenţa heteroscedasticităţii. Descrierea proceselor TS şi DS În această secţiune prezentăm doar cazul procesului nonsezoniere. Procesele TS Un proces TS se scrie
tttfx , unde ft este o funcţie
polinomială de timp, liniară sau neliniară şi εt un proces staţionar de tip ARMA. Procesul TS cel mai simplu este reprezentat printr-o funcţie polinomială de ordinul unu. Acest proces se scrie:
tttaax
10.
Dacă εt este un zgomot alb (gaussian sau nu), caracteristicile acestui proces sunt: ttxx
VxV
taaEtaaxE
tt
tt
tt
pentru 0,cov
0 2
1010
Acest proces TS este nestaţionar deoarece E[xt] depinde de timp. Deoarece speranţa este egală cu a0 + a1t, deci este vorba la momentul t de o cifră sigură. În acest caz, se pot estima în mod eficace parametrii a0 şi a1 ai tendinţei folosind metoda celor mai mici pătrate ordinare (MCMMPO) asupra perechilor de valori (xt, t): aceşti estimatori posedă proprietatea de a fi eficienţi şi nondeplasaţi (Best Linear Unbiaised Estimator) şi pot
2

deci fi folosiţi prin urmare pentru a realiza o previziune a cronicii. Cunoscând
0 şi
1, procesul xa a t poate fi
staţionarizat reducând valoarea xt în t cu valoarea estimată . În acest tip de modelare, efectul produs de un şoc
(sau de mai multe şocuri aleatoare) la un moment t este tranzitoriu. Modelul fiind determinist, cronica îşi va regăsi mişcarea pe termen lung, care aici este dreapta tendinţei. Este posibil de a generaliza acest exemplu la funcţii polinomiale de oricare ordin, dar, de asemenea, la
forme f neliniare sau chiar la modele unde ε
taa10
ˆˆ
t t este un proces de tip ARMA. Procesele DS Procesele DS sunt procese care se pot transforma în staţionare prin folosirea unui filtru de diferenţe:
unde ε tt
d
xB 1 t este un proces staţionar de tip ARMA sau chiar un zgomot alb, β o constantă reală şi d ordinul filtrului de diferenţiere. Aceste procese sunt deseori reprezentate utilizând filtrul diferenţelor de ordinul 1 (d = 1). Procesul, atunci, este numit proces de ordinul unu. Ele se scrie:
ttt
tt
xx
xB
1
1
unde εt este un proces staţionar de tip zgomot alb (gaussian sau nu). Introducerea constantei β în procesul DS permite definirea a două procese diferite: β = 0: procesul DS este numit fără derivă. El se scrie:
tttxx
1.
Este vorba de un proces autoregresiv de ordinul 1 cu parametrul 1
1 sau chiar de o ecuaţie de referinţă de
3

ordinul unu. Deoarece εt e un zgomot alb, acest proces DS poartă numele de mers aleatoriu (Random Walk Model). Foarte des se foloseşte pentru analiza eficienţei numeroaselor pieţe cum ar fi piaţa produselor de rădăcină sau cea financiară. Pentru a studia caracteristicile acestui model, îl vom scrie sub forma sa de medie mobilă infinită:
etc. ,123232
12121
1
ttttttt
ttttttt
ttt
xxxx
xxxx
xx
Dacă primul termen al cronicii este x0, modelul atunci se scrie:
t
iit
xx1
0
Caracteristicile acestui proces sunt (presupunând x0 dat): ttttMinxx
txV
xxE
tt
t
t
daca ,,cov 2
2
0
Acest proces este nestaţionar în varianţă, deoarece ea depinde de timp. Această nestaţionaritate este aleatoare. Pentru a staţionariza modelul este suficient de a aplica procesului filtrul de diferenţe de ordinul 1:
ttttt
xBxx
11
În scrierea desfăşurată a modelului, se constată că
reprezintă în t o acumulare de şocuri aleatoare de la 1
la t. Deci, fiecare din ele va avea un efect permanent asupra seriei brute ceea ce are drept consecinţă lărgirea seriei de la valoarea sa iniţială x
t
it
1
0. Dacă, la un moment dat t se produce un şoc important asupra seriei, efectul acestui impuls îndepărtează valoarea seriei brute de la punctul de impact şi efectul este permanent (şi deci netranzitoriu). - 0 : procesul are denumirea de proces DS cu derivă. 4

El se scrie: ttt xx 1 . Ca şi în cazul precedent, se poate cerceta forma sa echivalentă desfăşurată:
etc.
3
2
123232
12121
1
tttttttt
ttttttt
ttt
xxxx
xxxx
xx
Dacă presupunem că valoarea iniţială a fost cunoscută şi deterministă, obţinem:
0x
t
iit txx
10
Se pot analiza caracteristicile acestui proces: ttttMinxx
txV
txxE
tt
t
t
daca ,,cov 2
2
0
Procesul este nestaţionar prin speranţa şi varianţa sa. Speranţa fiind de aceiaşi formă ca cea a procesului TS, se recunoaşte în acest proces o nestaţionaritate deterministă şi aleatoare în acelaşi timp. Staţionarizarea acestui proces se efectuează folosind filtrul diferenţelor de ordinul1:
ttttt xBxx 11 Sau folosind forma desfăşurată:
t
iit txx
10 şi calculând:
1
101 1
t
iit txx
Obţinem: tttt xBxx 11
Consecinţele unei slabe staţionarizări a procesului Pentru a staţionariza un proces TS, metoda cea bună este metoda celor mai mici pătrate ordinare(MCMMPO), iar pentru un proces DS trebuie de folosit filtrul diferenţelor. În continuare ne vom interesa de consecinţele unei 5

alegeri proaste a tehnicii de staţionarizare pentru un proces. Vom aplica în acest scop studiile Chan K.H., Hayya J.C. şi Ord J.K.(1977) şi Nelson C.R. şi Kang H.(1981), care au analizat repercusiunile asupra reziduurilor unei alegeri nereuşite a procesului de staţionarizare de la bun început. Consecinţele asupra un proces TS Pentru un proces TS, metoda cea bună de staţionarizare este metoda celor mai mici pătrate ordinare. Vom presupune că pentru procesul TS de ordinul 1 se aplică un filtru de diferenţe primare. A priori, deoarece ordinul polinomului este 1, acest filtru poate fi considerat ca fiind corect pentru că un filtru de diferenţe de ordinul d elimină un polinom de acelaşi ordin.
tt
ttttt
tt
ttt
x
xBxx
tx
diitx
1
111
1101
210
1
1
,0...cu
Prin analogie cu cazul precedent, vom calcula caracteristicile acestui nou proces:
11
1
,cov
hthttt
htt
hthttt
hhtt
t
E
E
xExxExE
xx
xE
De unde:
cazuri celelaltein 0
1;1
022
2
h
h
h
Funcţia de autocorelare 0
hh se scrie 2
0 2 :
6

cazuri celelatein 0
1;12
101
h
h
h
Procesul obţinut Δxt nu are caracteristicele unui zgomot alb deoarece γh (sau ρh) nu este o funcţie de autocovarianţă a unui zgomot alb. Aplicarea unui filtru cu diferenţe a creat o perturbare artificială. Rezultatul poate fi analizat într-o manieră diferită apelând la analiza în domeniul frecvenţelor. Procesul xt care conţine o tendinţă deterministă are un spectru de tip roşu, adică foarte mult legat de bazele frecvenţei, prin existenţa tendinţei pe care analiza Fourier o asimilează unei perioade de lungime infinită. Atunci când se aplică metoda cea bună pentru a staţionariza o cronică, rămâne εt care trebuie să fie spectrul unui zgomot alb (paralel cu axa frecvenţelor). Cu filtrul diferenţelor, se obţine
tttt yx 11 care este un MA(1) neinversabil cu constantă. Deoarece spectrul teoretic al unui MA(1) este: 2cos212 11
2 f . Pentru θ1 = 1, polinomul operatorului are o rădăcină pe cercul unitar, fie: 2cos14 2 f .
Derivata sa are drept rădăcini λ = 0 şi λ = ½ şi este strict pozitivă pentru
2sin8 2f
2/1;0 . Funcţia f(λ) este deci crescătoare; deci nu este un zgomot alb. Consecinţele asupra unui proces DS Metoda bună de staţionarizare pentru un proces DS de prim ordin este filtrul diferenţelor primare.
7

Vom presupune că se aplică metoda celor mai mici pătrate ordinare (regresie asupra timpului) asupra observaţiilor unui eşantion al procesului. Reziduul acestei regresii este deci un zgomot alb. Nelson şi Kang arată că, în acest caz, reziduurile sunt de medie nulă, dar covarianţa lor depinde de mărimea eşantionului şi de timp. În baza simulărilor, ei indică că eliminarea unei tendinţe lineare asupra unui proces de mers aleatoriu creează artificial o autocorelare puternică a reziduurilor pentru primele întârzieri şi deci introduc un mers pseudo-periodic de amploare, cu atât mai important cu cât numărul observaţiilor cronicii iniţiale este mai mare. În cazul în care εt sunt autocorelate pozitiv (εt se supune unui AR(1) în simulările autorilor) concentrarea greşită cu frecvenţe joase a spectrului reziduurilor este întărită, pe când ea este atenuată în cazul unei autocorelări negative. În concluzie, când procesul TS linear este considerat ca fiind un proces DS, are loc amplificarea valorilor spectrale de înalte frecvenţe care indică introducerea în cronica tratată a unei mişcări ciclice scurte. A contrario, atunci când o serie DS este din punct de vedere statistic tratată ca fiind TS, spectrul seriei transformate posedă o concentrare de puteri spectrale în jurul frecvenţelor slabe. Are loc crearea, în cronica transformată, unei mişcări ciclice lungi. Aceste rezultate arată pe plan statistic şi în particular pentru a calcula o previziune, că o alegere a unui proces DS sau TS ca structură a cronicii eşantionului nu este neutră. Consecinţele sunt la fel importante pe plan economic. Vom considera, de exemplu, PIB-ul unei ţări ca Franţa în
8

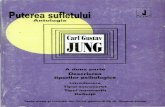
valoare reală. Dacă PIB-ul este mai degrabă DS decât TS, ar trebui să ne îndoim de descompunerea tradiţională (tendinţă şi ciclu) şi justificarea sa teoretică:independenţa schemelor explicative. Dacă PIB-ul este de fapt un DS, creşterea şi ciclul sunt legate şi nu pot fi, în consecinţă, studiate în mod separat. Or, conform lucrărilor lui Nelson şi Plosser (1982) asupra cronicilor macroeconomice americane, variabilitatea constatată a componentei conjuncturale s-ar datora unei structuri DS. Deoarece până în prezent, analiza acestei componente are loc în baza reziduului unei regresii între PIB şi o tendinţă deterministă, această analiză supraestimează amplitudinea ciclului şi subestimează importanţa tendinţei. În baza acestei constatări, Beveridge S. şi Nelson C. R. (1981) propun o descompunere a proceselor conform unei tendinţe stocastice (permanente) care se supune unui mers aleatoriu cu sau fără derivă şi o componentă staţionară (tranzitorie). Prin urmare Harvey A.C. (1988) foloseşte modelele structurale cu componente neobservabile (model tendinţă plus ciclu şi tendinţă-ciclu) reprezentate sub forma unui model spaţiu de stări estimat prin filtru Kalman. Graficul 1 ilustrează alura acestor două procese generate (YD = procesul DS cu derivă, YT = procesul TS), vom remarca similitudinea alurii pentru fiecare grafic : în consecinţă , procesul cu derivă este DS şi TS în acelaşi timp. O simplă examinare a graficului nu ne permite de a determina tipul procesului, trebuie de recurs la teste statistice.
9

0
200
400
600
800
1000
1200
20 40 60 80 100 120 140 160 180 200
YD
-50
0
50
100
150
200
250
20 40 60 80 100 120 140 160 180 200
YT
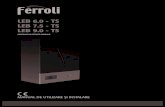
Graficul 1 – Cele 2 procese generate Examinarea celor două corelograme a proceselor pentru diferenţele de ordinul1 indică un zgomot alb pentru DYD ( Figura 1) , deoarece toţi termenii aparţin intervalului de încredere. Drept revanşă, corelograma procesului DYT ( Figura 2) are primul său termen semnificativ diferit de 0, rezultă că procesul DYT nu mai este un zgomot alb.
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
10

-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Figura 1 – Corelograma procesului DYD Figura 2 – Corelograma procesului DYT Examinarea acestor două corelograme ale proceselor staţionare prin regresionarea asupra timpului indică un zgomot alb pentru RES1, reziduu procesului YT, ( Figura 3) deoarece toţi termenii aparţin intervalului de încredere. . Drept revanşă, corelograma procesului RES2 ( Figura 2), reziduu procesului YD este caracteristic unui proces nonstaţionar. Termenii corelogramei descresc foarte slab, RES2 nu mai este un zgomot alb.
11

-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Figura 3 – Corelograma procesului RES1 Figura 4 – Corelograma procesului RES2 Testele bazelor unitare nonsezoniere Chiar din introducere s-a observat ca structurile DS si TS joaca un rol foarte important în reflectarea statistică a unei cronici. Totuşi, care dintre aceste structuri poate fi aleasă? Testele de detectare a bazei unitare în procesele generatoare încearcă să răspundă la aceasta chestiune. Pentru început vom prezenta testul Dickey-Fuller simplu (1979), şi mai apoi testul Dickey-Fuller extins (1981) care permite de a pune în evidenţă caracterul staţionar sau nestaţionar al unei cronici prin determinarea unei tendinţe
12

deterministe sau stocastice; apoi extinderile acestor două teste sunt expuse în felul următor: Phillips şi Perron (1988) şi KPSS (Kwiatkowski si al., 1992) Testele Dickey-Fuller simple Modelele de rădăcină Există trei tipuri de modele ce stau la baza construirii acestor teste : [1] tt axB 11 Model autoregresiv de ordinul I: AR (1) [2] tt axB 11 Modelul AR(1) cu constantă, unde E[ ] =tx [3] tt atxB 11 Modelul AR(1) cu trend şi 2;0... at diia Principiul acestor teste: dacă în unul din aceste modele 11 , atunci polinomul operatorului de proces conţine rădăcină unitară (“Unit Root”) B=1. Procesul, conform teoremei lui Doob, este nonstaţionar. Modul de specificare depinde de datele iniţiale. Caracterizarea modelelor Modelul [1] ttttt axxaxB 111 Fie ipoteza H0: 11 Modelul se prezintă în baza acestei ipoteze:
t
iitttttt axxaxxaxB
1011
Se consideră un model DS cu “mers aleator” a cărui caracteristici nonstaţionare au fost descrise anterior: Dacă H0 este acceptată atunci procesul staţionarizat este: tt ax Dacă ipoteza alternativă H1: 11 este acceptată, atunci
este un AR(1) staţionar. tx
13

Modelul [2] tt axB 11 111 1 cundeacxx ttt pentru H0: 11 Modelul se scrie (având c=0 în consecinţă): ttt axx 1
Acesta este un model DS cu “mers aleator”(pentru modelul [1]). Se va reda staţionar prin transformarea: tt ax Pentru ipoteza alternativă: H1: 11 avem AR(1) staţionar cu constantă. Modelul [3] tt atxB 11 ttt acbtxx 11 cu 111 11 bşic Pentru H0: 11 Atunci b=0 şi c = şi modelul va fi: ttt axx 1 Se consideră un mers aleator cu derivă (procesul DS cu derivă) Soluţia sa are forma următoare:
t
iit atxx
10
Este nonstaţionar, determinist şi aleator în acelaşi timp. Se va prezenta staţionar prin intermediul filtrului cu diferenţe de ordinul I: tt ax Cu ajutorul ipotezei alternative H1: 11 , modelul poate fi scris, înlocuind
t ttt aBtx 11: Considerăm modelul: tt tx . Deoarece tt a
B11
1
este
un proces ARMA (partea MA infinită), procesul este un proces TS cu eroarea ARMA; se poate de redat staţionar
tx
14

calculând abaterile în raport cu trendul estimat prin metoda celor mai mici pătrate. În concluzie, în tabel sunt prezentate tipologia modelelor Tipologia modelelor Modelul 1 Modelul 2 Modelul 3
0H
DS fără derivă Staţionar de ordinul I Nonstaţionar de ordinul 2
DS fără derivă Staţionar de ordinul I Nonstaţionar de ordinul 2
DS cu derivă Nonstaţionar de ordinul 1 şi 2
1H AR(1) AR(1) cu constantă
TS cu eroare ARMA
Principiul testelor Dickey-Fuller Pentru ipoteza H0, procesul nu este staţionar în cazul oricărui model. Conform legităţilor uzuale din statistica inferenţială nu pot să fie aplicate pentru a testa această ipoteză, în particular distribuţia Student pentru parametrul
tx
1 . Dickey şi Fuller au studiat distribuţia asimptotică a estimatorului 1 pentru ipoteza H0. Cu ajutorul simulărilor formulate de Monte – Carlo , ei au introdus aceste valori critice într-un tabel pentru eşantionări de volume diferite. În 1976, Fuller consideră modelul [1]: ttt axx 11 cu
20 ;0...0 at diiaşix . Dacă se notează 1 estimatorul de
maximă verosimilitate a lui 1 . Se verifică:
n
tt
n
ttt
x
ax
2
21
21
11ˆ
15

Aceasta îi permite autorului să formuleze următoarea teoremă: Dacă 11 atunci modelul [1] va avea forma .
Fie
t
iit axx
10
1 estimatorul M.C.M.M.P. astfel: sau se mai adaugă:
1n1 )1ˆ( Op
RMM ,0,0 , încât 1nM 1 1P . În funcţie de această teoremă autorul demonstrează convergenţa , estimatorul M.C.M.M.P. a modelului: )1ˆ( 1
ttt axx 11 1 . Acest estimator converge mai repede spre valoarea reală decât în cazul când 11 . Rubin (1950) a demonstrat că 1 este un estimator convergent oricare ar fi valoarea lui 1 , dar această statistică nu urmează o lege normală. De aceea Fuller a utilizat simulări, cu ajutorul metodei Monte – Carlo, pentru a obţine valorile critice. Prin urmare, Dickey-Fuller au cuprins rezultatele şi modelelor [2] şi [3], arătând că convergenţa 1
~1 1
*1 şi a
estimatorilor M.C.M.M.P. a )1( 1 . Autorii au încercat să testeze valoarea ce va substitui valoarea )11 ˆ( 1 în scopuri doar statistice. Aceasta nu afectează testul. Astfel,
ttt axx 11 se prezintă şi în forma: ttttt axxxx 1111 ttt axx 11 1 Deci, este echivalent cu testarea ipotezei H0: 11 unde
011 . Se stabilesc “t - statistici”, ca şi în cazul distribuţiei Student a modelului liniar general. Testele constau în: estimarea prin M.C.M.M.P. a parametrului 11 a celor trei modele: , , * ~ ; estimatorul M.C.M.M.P. ce furnizează , , pentru
exemplul
pt ˆ *pt pt ~
ppt
ˆ
1ˆ ˆ
1ˆˆ
16

Dacă , atunci se acceptă ipoteza Htabelarp tt ˆ 0, adică există rădăcină unitară. Testul se realizează ca şi pentru modelele de tipul [2] şi [3]. În acelaşi timp, se poate nota că în cazul acceptării ipotezei H0, nu se pot aplica testele Student clasice pentru alţi coeficienţi (b şi c), dar se recurge la tabelele statistice alcătuite prin simulare. Remarcă: Principalele logisiele de analiză a seriilor de timp calculează în mod automat valorile critice a lui . pt ˆ
Aceste teste relevă existenţa unei rădăcini unitare, dar rămân insuficiente pentru discriminarea proceselor TS şi DS peste tot pentru modelele [2] şi [3], care introduc alte variabile explicative decât . În consecinţă, ele fiind completate de testele adăugate.
1tx
Testele ipotezelor adăugate Testele ipotezelor suplimentare se referă la modelele [2] şi [3]. Ele permit detectarea unei rădăcini unitare şi distingerea mersului aleator ale proceselor TS liniare. Modelul [2]
111 1 cundeacxx ttt Se efectuează testul de detectare a rădăcinii unitare, apoi testul ipotezei suplimentare notată contra ipotezei .
)1;0();(: 110 cH
11H
Pentru a realiza acest test, se calculează statistica empirică F1:
2/
2/
2
21
nSCR
SCRSCRF C
17

unde: CSCR - suma pătratelor reziduurilor ale modelului [2]
aferentă ipotezei , având 10H
2
1 t
ttc xxSCR
2SCR = suma pătratelor reziduurilor ale modelului [2] care nu corespund estimărilor prin M.C.M.M.P.. n – numărul observaţiilor utilizate pentru estimarea parametrilor modelului1. Gradele de libertate de la numărător )( 2SCRSCRC este egal cu
, deoarece nici un parametru nu e estimat în modelul reţinut. În cazul când este acceptată , atunci valoarea nulă a lui c poate rezulta din cauza mediei nule
20 nn 10H
a seriei de timp. Se realizează, deci, un test de normalitate, chiar dacă seriile economice (necentrate) sunt rareori de medie nulă. Această statistică F1 este similară unei legi Fisher. Dickey şi Fuller au introdus valorile critice ale distribuţiei empirice şi asimptotice (este asemănător şi pentru statisticile F2 şi F3). Dacă F1este superior valorii Ф1 citit2 în tabelul pentru pragul de semnificaţie , atunci se respinge ipoteza pentru pragul de semnificaţie 1
0H . Modelul [3] Avem: ttt acbtxx 11
11
1
1
1
c
b
1 Unii autori consideră că n este numărul de observaţii disponibile iniţial, în timp ce regresia asupra unui model autoregresiv determină pierderea unei observaţii. De aceea, pentru aceşti autori, în statistica F1 gradele de libertate pentru SCR2 este deseori egal cu n-1-2=n-3 2 Tabelele statistice se găsesc în Dickey-Fuller, 1981, p.1063
18

Conform testului rădăcinii unitare, se efectuează pentru acest model următoarele teste a două ipoteze suplimentare:
)1;0;0();;(: 120 bcH contra ipotezei unul din parametru este
diferit. )1;0;();;(: 1
30 cbcH contra ipotezei unul parametru este diferit.
Pentru ipoteza , se calculează statistica F20H 2:
3/
3/
3
32
nSCR
SCRSCRF C
Pentru ipoteza , se calculează statistica F30H 3:
3/
2/
3
33
3
nSCR
SCRSCRF c
unde:
CSCR - suma pătratelor reziduurilor ale modelului [3] aferentă ipotezei ; 2
0H
2
13 ˆ
tttc cxxSCR - suma pătratelor reziduurilor ale
modelului [3] ce corespunde ipotezei 30H
3SCR = suma pătratelor reziduurilor ale modelului [3] care nu corespund estimărilor prin M.C.M.M.P.. n – numărul observaţiilor utilizate pentru estimarea parametrilor modelului. Gradele de libertate de la numărător sau
sunt egale cu [(n-0)-(n-3)], respectiv cu [(n-1)-(n-3)], ţinând cont de numărul de parametri estimaţi.
)( 3SCRSCRC
)( 33 SCRSCRc
Statisticile F2 şi F3 sunt similare unei legi Fisher, în cazul tabelelor Dickey-Fuller . Dacă F2 este superior valorii citite în tabelul Ф2, atunci se respinge ipoteza pentru un prag de semnificaţie
20H
. Iar dacă F3 este superior valorii citite în tabelul Ф3, se va respinge ipoteza la fel pentru un prag de semnificaţie
30H
.
19

Concluzie: Vom constată că pentru a realiza testul Dickey-Fuller , rezultatul nu este identic cu cel în urma utilizării a unui model din cele trei ca fiind proces generator al cronicii iniţiale. Deci, concluziile la care ne referim sunt diferite şi pot duce la transformări eronate. Acesta este motivul pentru care Dickey şi Fuller şi alţi autori, au elaborat strategii ale testelor. Acestea din urmă sunt numeroase, dar au fost totuşi sintetizate şi prezentate exhaustiv de către Ertur (1992). Vom prezenta o strategie de test care prezintă şi un avantaj al simplităţii. Această strategie este facil automatizată cu ajutorul instrumentelor de programare Eviews. Testele Dickey-Fuller extinse Transformările modelelor de rădăcină Pentru testele Dickey-Fuller simple, procesul este un zgomot alb prin ipoteză. Or nu este nici un rezon, a priori , ca eroarea să fie necorelată; se numesc teste Dickey-Fuller Extinse (DFA, 1981) luarea în consideraţie a acestei ipoteze.
at
Vom considera, de exemplu, modelul [1], ce poate fi scris astfel: tt zxB 11 unde este un proces AR(p-1). tz
1
1
2;0...p
iattitit diiaundeazz .
tz se scrie de asemenea utilizând polinomul operatorului: ttp azB )(1 . Multiplicând ambii membri ai procesului AR(1) autocorelat de )(1 Bp , vom avea:
tt axBBp 11 1)( sau de AR(p):
20

tptpptpptt axxxx 111121111 ... [A] Procesul urmând un AR(1) cu erori autocorelate de ordinul (p-1) este echivalent cu un AR(p) ce are erori necorelate, procesul fiind înălbit. Testele Dickey-Fuller simple pot fi aplicate. Deseori scrierea modelului x
tx
t este mai complexă complexe luând în considerare prezenţa j. Fie AR (1)
);0.(..1 21111
1
attttt
ttt
diiaundeaxxxx
axx
Procesul AR(2)
tttt
ttttt
ttttttt
tttt
axxx
axxxx
axxxxxxx
axxx
12121
212121
2212121111
2211
1
1
Procesul AR(3)
ttttt
ttttttt
tttttttttttt
ttttt
axxxx
axxxxxx
axxxxxxxxxxxx
axxxx
231321321
3232121321
23233313132212121111
332211
1
1
S-a dedus prin recurenţă forma AR(p):
tjt
p
j
p
jkkt
p
kkt
tptptt
axxx
axxx
1
1 11
1
11
1
...
Utilizând pentru p ....,, 21 coeficienţii formei [A], vom avea:
21

11
1211
1122
111
....
pp
ppp
Expresia [B] obţine forma:
1
1 111111
1
111121111
1
1111112111211
...11
1......1
1...
p
jtjt
p
jkjkktp
p
j
tjt
p
jkk
tppt
p
j
tjt
p
jkk
tpppt
axx
axxx
axxx
care poate fi scris:
p
jtjtjtt axxx
211
Pentru a testa prezenţa bazei unitate se cere mai întâi testarea semnificaţiei coeficientului care se află pe lângă
ca şi pentru testul Dickey-Fuller simplu. 1tx
De unde ipoteza testată este: 0H
1010...11: 111110 sauH p Aşadar, când erorile sunt corelate în modelul [1], se
va prezenta modelul iniţial cu ajutorul expresei precedente (fie deci modelul [4]), care va evidenţia rădăcina unitară pentru ce implică aceeaşi procedură a testului Dickey-Fuller. Demonstrările precedente se referă la modelele [2] şi [3] notate respectiv modelele [5] şi [6].
0H
În concluzie, desfăşurarea testului este identică cazului precedent: detectarea rădăcinii unitare , testul ipotezei suplimentare şi în final strategia de testare. Principiile testului DFA şi testele ipotezelor suplimentare
22

Fie: şi );0.(.. 21
1at
p
ititit diiaundeazz
( plibertatedegradecuuioperatorula )1 polinomunBşiazB tt Specificarea modelelor Modelul [4] tt zxB 11 Pentru ipoteza nulă a unei rădăcini unitare 11 , modelul devine:
ttt zxx 1 şi fiind: tt zx tt axB Aici este vorba de un proces DS autocorelat, caracterizat printr-o nonstaţionaritate stocastică şi staţionar în diferenţe. În cazul ipotezei alternative 11 , procesul este AR(p); expresia modelului este următoarea: A(B)
tx
tt ax cu BBBA 11 un polinom întârziat de ordinul p. Deci, vom
avea un proces AR(p) asimptotic staţionar. Modelul [5] tt zxB 11 care poate fi scris:
BBcundeacxBB
aBBxBB
axBB
t
tt
tt
11
11
1
11
11
1
În cazul ipotezei nule a rădăcinii unitare 11 , vom avea: ttttttt axBşizxundezxx 1
Vom considera un proces DS autocorelat, caracterizat de o nonstaţionaritate stocastică şi staţionar în diferenţe cu c=0. În cazul ipotezei alternative 11 , avem modelul: tt axBB 11 sau: BBBAcuaxBA tt 11 un
polinom întârziat de ordinul p. 0 BAcundeacxBA tt
23

Deci, avem procesul AR(p) cu constanta asimptotică staţionară. Modelul [6] tt ztxB 11 Fie: tt atxBB 11 O demonstrare similară celei precedente permite descrierea modelului sub forma: tt abtcxBB 11
unde 111 11 BcşiBBb Pentru ipoteza nulă a rădăcinii unitare 11 , vom avea:
ttt zxx 1 şi tt zx . Fie tt acxB , unde Bc Referitor la un proces DS cu derivă autocorelat, caracterizat de o nonstaţionaritate de natură mixtă: deterministă şi stocastică. Pentru ipoteza alternativă 11 , procesul este de tipul TS caracterizat de un trend determinist şi de forma: tztB 11 sau BBBAundeatBBxBA tt 11
Efectuarea testelor Testele ADF se bazează, în cazul ipotezei alternative 11 , pe estimatorul M.C.M.M.P. calculat pentru cele trei modele: Modelul [4]:
p
jtjtjtt axx
211
Modelul [5]:
p
jtjtjtt acxx
211
Modelul [6]:
p
jtjtjtt abtcxx
211
24

unde );0.(.. 2at diia
Testul se derulează în mod asemănător cazulului testelor Dickey-Fuller simple. Tabelele utilizate sunt cele realizate de către MacKinnon (1991). Astfel, efectuând un număr mare de simulării MacKinnon a estimat pentru eşantioane de diferite volume şi pentru oricare număr de variabile explicative valorile critice pentru testele rădăcinii unitare. Eviews indică în mod automat valorile critice obţinute din tabelele MacKinnon. Determinarea numărului de decalaje: Dificultatea, pentru a utiliza acest tip de test, rezidă în a cunoaşte a priori pentru modelul AR ordinul lui. Numărul de întârzieri p trebuie de găsit pentru a elimina autocorelaţia . Metoda cea mai simplă constă în reţinerea unei valori p importante şi, mai apoi, a elimina progresiv în funcţie de semnificaţia întârzierilor (în acest caz se aplica testele Student clasice). Autorii propun efectuarea testelor luând trei întârzieri: 4, 8 şi 12 şi a compara în continuare rezultatele conform mediei criteriilor AIC. Astfel, valoarea lui p poate fi determinată în funcţie de criteriile Akaike şi Schwarz. Pornind de la o valoare p destul de înaltă, estimăm diferite modele până la p=0, apoi reţinem valoarea p care se minimizează după criteriile Akaike şi Schwarz. Dacă valoarea p=0 este reţinută, atunci noi utilizăm testul Dickey-Fuller simplu.
tz
tz
Testele ipotezelor suplimentare
25

După ce s-a detectat prezenţa unei rădăcini unitare, se efectuează testele ipotezelor suplimentare. Primul test Fie ipoteza suplimentară în modelul[5] notată3
, iar ipoteza alternativă . 0;0;:40 cH 4
0H
Pentru a efectua acest test, se calculează statistica empirică F4:
21/
2/
5
54
pnSCR
SCRSCRF c
(p-1 de la numitor se referă la suma de la j=2 şi, de exemplu, pentru p=3 aceasta conţine două variabile explicative).
CSCR - suma pătratelor reziduurilor ale modelului [5] restricţia ipotezei ; 4
0H
2
2 211 ˆ,
p
j
p
jjtjtctjtjt xaxSCRiaraxax
5SCR - suma pătratelor reziduurilor ale modelului [5]
estimată prin M:C:M:M:P. n – numărul observaţiilor real utilizate pentru estimarea parametrilor modelului. Această statistică F4 este similară unei legi Fisher, care a fost tabelată de către Dickey-Fuller (1981). Dacă F4 este superior valorii citite din tabel , se va respinge ipoteza pentru un prag de semnificaţie
1;2 pn
40H
Al doilea şi al treilea test Ele corespund ipotezelor nule: 0;0;0;;:5
0 bcH 0;0;;;:6
0 cbcH
26

Pentru ipoteza , se va calcula statistica F50H 5
31/
3/
6
65
pnSCR
SCRSCRF c
Dacă F5 este superior valorii citite în tabelul , se respinge ipoteza pentru pragul de semnificaţie
2;2 pn
50H .
Pentru ipoteza , se determină statistica F60H 6:
31/
2/
6
66
pnSCR
SCRSCRF D
DSCR - suma pătratelor reziduurilor ale modelului [6] restricţia ipotezei ; 6
0H
2
2 211 ˆˆ,
p
j
p
jjtjtDtjtjt cxaxSCRiaracxax
6SCR - suma pătratelor reziduurilor ale modelului [6] estimată prin M.C.M.M.P. Dacă F6 este superior valorii citite în tabelul , se respinge ipoteza pentru pragul de semnificaţie
2;3 pn
60H .
Testul Phillips şi Perron Testul Phillips şi Perron (1988) este construit pe baza unei corecţii nonparametrice a statisticilor Dickey-Fuller pentru a ţine cont de erorile heteroscedastice şi / sau autocorelate. Se realizează în patru etape: Estimarea prin M.C.M.M.P. a celor trei modele de rădăcină a testelor Dickey-Fuller şi calcularea statisticilor aferente acestora, având et – rezidiul estimat;
27

Estimarea varianţei, aşa zis pe termen scurt a reziduurilor
n
tte
n 1
22 1 ;
Estimarea factorului de corecţie (numit varianţa termenului pe termen lung) stabilind începând cu structura covarianţelor reziduale ale modelelor anterior estimate în aşa fel încât transformările realizate să conducă la distribuţii identice celor efectuate de Dickey-Fuller standard:
2ts
n
ititt ee
1
n
t
l
itt nl
ie
ns
1 1
22 1
112
1 .
Pentru a estima varianţa pe termen lung , este necesar de definit numărul întârzierilor l (troncature Newey -West) estimat în funcţie de numărul de observaţii
; 9/2100/4, nln
Calculul statisticii PP:
k
knkt 1
1
1
ˆ1
ˆ
11*ˆ
cu 2
2ˆ
tsk
( este
egal cu 1 – în manieră asimptotică – dacă e zgomot alb). Această statistică este comparată cu valorile critice din tabelul MacKinnon. Strategia testului din figura 5.6 este acceptată. Acest test rămâne valabil în cazul când testând Dickey-Fuller simplu reziduurile sunt homoscedastice . Eviews permite automat utilizarea acestor teste. Testul Hall (1990) este complementar testului precedent şi poate să nu fie valid, fiindcă ordinul autoregresiv devine mare, în timp ce ordinul mediilor mobile rămâne finit. Acest test pentru calculare apelează la o variabilă dihotomică.
28

Testul Ouliaris, Park şi Phillips (1989) este o extindere a testului Phillips şi Perron, incuzind un trend polinomial cu ordine de libertate k, iar în cazul testului Perron (1989) această tendinţă este liniară pe intervale. Testul Dickey şi Pantula (1987) Într-un proces când s-a determinat existenţa unei rădăcini unitare conform testului Dickey-Fuller, se recomandă a se verifica absenţa altor rădăcini unitare, reiterând aceste teste pe baza diferenţelor de ordinul unu ale procesului. Dickey şi Pantula au arătat că această procedură, calificată succesiv ascendentă (Barthélemy, 1996), poate să fie falsă, deoarece distribuţiile statistice sunt diferite chiar dacă există una sau două rădăcini unitare. Deci, autorii propun o procedură succesiv descendentă ce permite a testa simultan existenţa mai multor rădăcini unitare, referindu-ne la tabelele Dickey-Fuller. Vom consideră, de exemplu, testul referitor la 2 rădăcini unitare, pentru aceasta specificăm următorul model AR(2): undeaxBB tt 21 11 2;0... at diia Fie ttttt axxxx 2211211 Pentru a evidenţia apariţia polinomului (1-B)2 ce permite staţionarizarea procesului, se va adăuga la membrii egalităţii cantităţile 212 tt xx şi vom obţine:
tttttttt axxxxxxBx 21221221122 21
Deci, tttt axxx 1211212 111
29

Substituind 1'11 212211 şi obţinem următorul model: tttt axxx 1112
2
Atunci testul se derulează în două etape: Etapa 1: Testăm ipoteza nulă pentru ambele rădăcini unitare contra ipotezei alternative a unei singure rădăcini unitare, fie: 0:0: 11210 HcontraH . Pentru ipoteza H1, se efectuează regresia ttt axx 12
2
Dacă se respinge Htabtt 2 0 şi se trece la etapa 2;
Dacă se acceptă Htabtt 2 0, procesul conţinând două
rădăcini unitare. Etapa 2: Se testează ipoteza nulă de prezenţă a rădăcinii unitare contra ipotezei alternative pentru orice rădăcină unitară în ttt axx 11 1 . Acest test pentru 11 este echivalent celui pentru 1 a modelului . tx2
Acest test a lui Dickey şi Pantula este deci simplu de aplicat în practică , mai ales cu Eviews. Testul KPSS (1992) Kwiatkwski, Philips, Schmidt şi Shin (1992) propun un test fondat pe ipoteza nulă de staţionaritate. După estimarea modelelor [2] şi [3], se calculează suma parţială a reziduurilor: şi se estimează varianţa termenilor
extinşi ca şi pentru testul Phillips şi Perron.
t
iit eS
1
Statistica este 2
1
2
2
1
n
S
sLM
t
it
t
. Ipoteza de staţionaritate se
respinge dacă această statistică este superioară următoarelor valori critice :
30

n= 1% 5% 10% Modelul [2] 0,739 0,463 0,347 Modelul [3] 0,216 0,146 0,119
Testele rădăcinilor unitare sezoniere Prima aplicare a acestor teste în cazul sezonier a fost realizată de către Hasza Fuller (1981), apoi de către Dickey Hasza Fuller (1984). Ele se referă la cronicile a căror sezonalitate este o perioadă trimestrială şi se bazează pe ansamblul frecvenţilor ce corespund bazelor unitare. Ele au fost completate de Hylleberg, Engle, Granger şi Zoo (1990), notat HEGY care conţin frecvenţa fiecărei baze unitare. Franses (1990) prezintă un test pentru cronicile care posedă o sezonalitate lunară, Beaulieu şi Miron (1993) furnizează o nouă versiune a acestui test4. Modelele fundamentale În general, o serie de timp poate fi reprezentată prin unul din următoarele trei modele: Modelul sezonier pur determinist:
, unde s este perioada de
sezonalitate şi D
1
1
20 ;0...
s
jattjtjtt diiaundeaDx
jt – o variabilă mută relativă la sezonalitate; acest model poate fi extins asupra
31

tendinţelor deterministe polinomiale de ordine mai mari ca unu; Modelul sezonier aleator staţionar: ttt axB unde B este un polinom de operatori, a cărui rădăcini sunt în
exteriorul cercului unitate din planul complex şi t este un termen oricare între o constantă, o tendinţă şi variabile mute relative la sezonalitate; Modelul sezonier integrat: ttt axB unde B este un polinom de operatori care posedă cel puţin o rădăcină unitară (de unde şi denumirea sa de integrat). Utilizarea filtrului la diferenţele sezoniere propus de către Box şi Jenkins sub forma: BSB s 1 permite determinarea rădăcinilor unitare sezoniere continue în filtrul pentru media mobilă S(B). Testele HEGY şi Franses utilizează această descompunere pentru polinoamele (1-B4) şi (1-B12), obţinându-se respectiv 4 şi 12 rădăcini unitare, de exemplu:
iBiBBBB 11111 4
Toţi termenii cu excepţia lui (1-B) corespund rădăcinilor unitare sezoniere, ştiind că (-1) este pentru perioada 2 (frecvenţa ) şi pentru perioada 4 (frecvenţa i 2/ ). Pentru testarea ipotezei că polinomul B posedă rădăcini unitare pe cercul unitar a planului complex, se scrie utilizând teorema Lagrange5. Testele Hylleberg, Engle, Granger şi Yoo (HEGY) Utilizând extensia B din teorema Lagrange unde
443214321 1,1,1,1,1;,,1,1 BBşiiBiBBBii
se obţine, deci:
32

BBiBBBiB
iBBBiB
BBBBBBB
*44
3
22
21
1111
111
1111
Simplificând această expresie apelând la H(B) suma celui de-al doilea termen: BBBHB *41 şi utilizând procesul ttt axB vom
avea: ttt aBHxBB 4* 1
Această expresie este la baza testului, dar nu putem estima coeficienţii k , deoarece sunt numere complexe, deci se regrupează părţile reale şi complexe ale expresei şi se substituie:
4344332211 2;2;; ii Având sezonalitate trimestrială, acest test este alcătuit pe baza lui B , ce are o rădăcină unitară în k , dacă şi numai dacă 0k . Pentru testarea acestei ipoteze, se estimează prin M.C.M.M.P. ecuaţia de regresie numită “regresia auxiliară” :
ttttttt axxxxxB 1,342,331,221,114*
unde: tttt
tttt
xBxxBx
xBBBxxBBBx4
,42
,3
32,2
32,1
1;1
;1;1
În această ecuaţie B* este necunoscut. În particular, au fost propuse mai multe soluţii, care constau în a argumenta lagul polinomului până când reziduul să conţină zgomot alb sau unul din criteriile de comparaţie ale modelelor să fie minimum (AIC sau BIC). Deseori aceste teste sunt realizate pentru B* =1. Ipoteza nulă a testului presupune testarea semnificaţiei parametrilor regresiei auxiliare (care sunt echivalente cu
k ). Fie: H0: k =0 contra H1: k 0.
33

Presupunem, de exemplu, că 021 şi că B* =1, substituind aceste valori în expresia:
tttt axBHxBB 4* 1 , obţinem:
tt
t
aiBBBiB
iBBBiBxB
111
1111
4
34
Introducând descompunerea (1-B4), se va obţine: ttt axiBBiBiBiBiBiBBB 1111111 43 Această ecuaţie posedă două rădăcini unitare B=1 şi B=-1. Sunt acelea care lipsesc la coeficienţii 21 şi . Filtrul care staţionează acest proces este egal cu : BBB 111 2 Testul Franses Principiul testului Franses este identic principiului HEGY. Formulele sunt deseori mai complexe faptului de a prezenta douăsprezece rădăcini unitare. Extensia B este întotdeauna realizată conform teoremei Lagrange. Modalitatea posibilă de estimare a parametrilor lui B , propusă de Franses este următoarea: Separarea părţilor reale şi imaginare a fiecărui termen
, apoi regruparea termenilor comuni. Se defineşte, deci, seria regresorilor
B
Bi :
12
8
24247
24246
42245
42244
8423
8422
11
11
1
111
111
1311
1311
11
;1111
;1
BB
BBBBBB
BBBBBB
BBBBBB
BBBBBB
BBBB
BBBBBB
BBj
j
34

Eliminarea termenilor complecşi B prin utilizarea parametrilor i i definiţi în felul următor: H0:
0:0 jHcontraj ii pentru j=3,5,7,9,11 şi i=4, 6,8,10,12. (se notează ., 6543 etc );
121112
111111
10910
1099
878
877
656
655
434
433
22
11
2/33/113/3
2/33/113/3
2/33/113/3
2/33/113/3
;2/31
;2/31
;2/31
;2/31
;2/
;2/
;
;
ii
xii
ii
ii
ii
ii
ii
i
i
i
Substituirea coeficienţilor Bi şi i în B , care la rândul ei este o expresie liniară fără termen complex. Dacă considerăm, de exemplu, că procesul este sezonier integrat şi dacă se înlocuieşte:
7,...,28,1 ipentruxBxşiipentruxBx tiittiit se obţine regresia auxiliară a testelor:
tttttt
ttttttttt
axxxx
xvxxxxxxxxB
2,71217112,6101,69
2,581,572,461,452,341,331,221,11,8
11
Se estimează prin M.C.M.M.P. această ecuaţie, cel mai adesea, cu B sau mai bine cu , iar L fiind numărul de întârzieri, obţinuţi anterior.
B*
Ipoteza H0 este: 0B contra ipotezei H1: 0B . Aceste teste verifică semnificaţia celor doisprezece parametri k a regresiei auxiliare (care sunt egali cu valorile k ). Apoi, se realizează:
35

testele individuale H0: 0:0 1 kk Hcontra pentru k=1,…,12; testele pentru rădăcinile complexe conjugate: H0: 0:0 jHcontraj ii pentru j=3,5,7,9,11 şi i=4, 6,8,10,12. (se notează ., 654 etc3 ); un test pentru ansamblul coeficienţilor: H0: 0:0 jHcontraj ii pentru j=3,5,7,9,11 şi i=4, 6,8,10,12. (se notează ., 654 etc3 ); H0: 0....:0... jHcontraj jij pentru j=3,4, …, 12. (se notează 123 ... ); Valorile critice ale acestor teste (t – statistic pentru testele individuale şi F statistic pentru testele anexate) au fost tabelate de către Franses. ajustare şi nu antrenează o variaţie sensibilă a autocorelaţiei reziduurilor (Q statistica) inclusiv criteriile de comparaţie informaţionale (AIC, SBIC). Noi putem constata prezenţa rădăcinilor unitare pentru testele t pentru pragurile de semnificaţie de 5 la 10% pentru 3, 5, 9, 11, care nu se regăsesc pentru testele F. Definitiv putem constata că acest proces, însă este dificil de a selecţiona procesul generator al cronicii, deoarece statistica SBIC este cea mai slabă pentru regresia conată (nc, nd, nt). Tabelul 3 – Testele Franses pentru rădăcinile unitare sezoniere ale proceselui xt = xt–12 + at cu *(B) = 1
Statistiq nc, c, nd, c, d, c, c, d,
36

ue t nd, nt nt nt nd, t t 1 –1,78 –1,98 –
2,00–2,12
–2,14
2 1,42 1,42 –0,03
1,42 –0,03
3 –1,04 –1,04 –0,13
–1,04
–0,13
4 0,27 0,27 –1,49
0,27 –1,49
5 –0,52 –0,52 –1,52
–0,53
–1,52
6 –0,90 –0,90 –1,91
–0,90
–1,92
7 0,46 0,46 1,09 0,47 1,10
8 –1,08 –1,09 –2,02
–1,10
–2,03
9 –1,37 –1,36 –2,51
–1,36
–2,51
10 –1,38 –1,38 –3,32
–1,38
–3,32
11 0,57 0,57 0,79 0,57 0,7
37

9 12 –0,88 –0,88 –
1,78–0,88
–1,78
Statistique F
3 4 0,58 0,58 1,12 0,58 1,13
5 6 0,54 0,53 1,88 0,54 1,88
7 8 1,05 1,06 2,93 1,07 2,94
9 10 1,26 1,26 6,03 1,26 6,03
11 1
2 0,40 0,40 1,60 0,40 1,6
0 3 ... 12
0,77 0,77 2,71 0,77 2,72
Q Stat. 28,7 29,1 30,3 29,2 30,4
R 2 0,002 0,002 0,016
0,001
0,016
AIC 2,87 2,88 2,87 2,88 2,87
SBIC 0,097 0,102 0,14 0,11 0,15
38

IV. Procesele ARIMA Cronicile economice sunt rareori rezultatul proceselor staţionare. Acesta este motivul pe baza căruia - în algoritmul Box şi Jenkins – s-a stabilit drept primă etapă staţionarizarea cronicii. De obicei, se recurge la trei tipuri mari de transformări: dacă cronica prezintă mişcări pe termen lung tip nonlinear (logaritmic, exponenţial sau de funcţie putere) sau de fluctuaţii importante în jurul acestui mişcări, atunci deseori este util de utilizat transformarea Box-Cox, care permite de a regăsi liniaritatea şi de a micşora fluctuaţiile importante sau iregularităţile. Această transformare are următoarea formă:
0ln
01
şix
şix
y
t
tt
Dificultatea în utilizarea ei constă în alegerea lui 6. Se pot realiza mai multe transformări cu valori diferite ale lui şi obţine valoarea în funcţie de aspectul cronicii transformate. De asemenea, se poate calcula parametrul în timpul etapei de estimare a algoritmului Box şi Jenkins. Celelalte două tipuri de transformări se efectuează după prima transformare şi din care rezultă concluziile obţinute din testele Dickey-Fuller: Dacă procesul generator este de tipul TS, atunci se estimează prin M.C.M.M.P. partea sa deterministă şi algoritmul se va efectua asupra cronicii reziduale; Dacă procesul este de tip DS, atunci se aplică filtrele pentru diferenţe pentru a-l staţionariza. 6 Deseori se utilizează 0 pentru a transforma schema de structură multiplicativă în aditivă.
39

Aplicarea acestor filtre permite definirea proceselor ARMA integrate , notate ARIMA. Procesele ARIMA nonsezoniere Vom presupune o cronică xt- - un eşantion al procesului DS de ordinul d. Acest proces este staţionarizat utilizând filtru pentru diferenţe de ordinul d ( capitolul 4). t
dt
Bt xByx
d
11
Procesul xt conţine d rădăcini reale unitate. Se spune că este integrat de ordinul d şi se scrie: unde d ordinul de integrare.
dIxt
Dacă procesul output yt este ARMA(p, q), atunci procesul input xt este ARIMA(p, d, q). Modelul ARIMA(p, d, q) nonsezonier are forma:
tqtd
P aBxBB 1 (ARIMA(p,d,q)=ARIMA(p+d, q) nonstaţionar). În majoritatea cronicilor economice, testele Dickey-Fuller indică prezenţa unei singure rădăcini unitate şi cronicile se numesc integrate de ordinul 1, I(1). Dacă cronica iniţială apare în rezultatul unui proces staţionar, ea nu conţine rădăcina unitate, se spune că este integrată de ordinul 0 şi este notată I(0). Pentru ceilalţi termeni, ARIMA(p, 0, q) este ARMA(p, q) staţionar. Printre procesele ARIMA nonsezoniere, se poate menţiona procesul mersul aleator “Random Walk” ( procesul DS cel mai simplu). Procesele ARIMA pur sezoniere ( Modelele SARIMA)
40

Vom considera o cronică xt un eşantion al procesului DS de ordinul D de sezonalitate s. Acest proces este staţionarizat după ce a trecut printr-un filtru sezonier a diferenţelor D: t
Dt
Bt xByx
D
11
Procesul xt conţine D rădăcini reale sau complexe unitare. Se spune că este integrat sezonier de ordinul D şi se scrie
unde D este ordinul de integrare şi s e perioada de sezonalitate.
dIx St
Vom presupune că procesul output a filtrului yt este un proces , atunci procesul input x),(. QPARMA ss
,(. DPARMA ss
t este nonstaţionar: şi are următoarea formă: ),Q
tS
Qt
DSSp aBxBB 1
Se constată că modelul este ),,(. QDPARIMA ss ),(. QDPARMA ss nonstaţionar şi că este staţionar. ) (. PARMA ss ,0,(. QPARIMA ss ),Q
Procesele ARIMA nonsezoniere şi sezoniere în acelaşi timp Asamblând expresiile modelelor ARIMA nonsezoniere şi ARIMA sezoniere, se pot construi modele multiplicative ARIMA nonsezoniere şi sezoniere în acelaşi timp. Acesta este modelul cel mai complet şi adecvat în prezentarea Box – Jenkins. Vom considera o cronică xt eşantion al procesului în acelaşi timp DS de ordinul D şi DS de sezonaliate s. Acest proces este staţionarizat de către filtrul ce combină diferenţele de ordinul d şi diferenţele sezoniere de ordinul D. Fie:
t
DSdt
BBt xBByx
DSd
1111
41

Procesul xt conţine d+D rădăcini unitare reale sau complexe (se spune că este integrat de ordinul d+D) şi se scrie: . DdIx St
Dacă procesul output a filtrului este un model , atunci procesul input x),(),( . QPARMAqpARMA ss
,(),,( . PARIMAqdpARIMA ss
t este un model şi se exprimă: ),QD
ts
QqtdDSS
pp aBBxBBBB 11 Se constată că modelul ),,(),,( . QDPARIMAqdpARIMA ss este un ARMA(p+d+Ps+Ds,q+Qs) nonstaţionar şi că
este un model staţionar.
),0,(),0,( . QPARIMAqpARIMA ss ),(. QPARMA ss ),( qpARMA
42


![Tehnic` diamantat` - Hilti · 2014-06-04 · Tehnic` diamantat` 021.352.3000 05 Tehnic` diamantat` 153 Tehnic` diamantat` DST 10-E, DS-TS 20-E Fer`straie electrice pentru t`iat pere]i](https://static.fdocumente.com/doc/165x107/5e3072d77b33663fd454ae3b/tehnic-diamantat-hilti-2014-06-04-tehnic-diamantat-0213523000-05-tehnic.jpg)