
2 CAPITOLUL 2 Traductoare - tmt.ugal.ro · PDF fileBibliografie 2 CAPITOLUL 2 Traductoare...
17
Bibliografie 2 CAPITOLUL 2 Traductoare Acest capitol este dedicat prezentării structurii și funcționării celor mai frecvent utilizate traductoare, și anume: traductorul de debit, nivel, presiune, temperatură, poziție și viteză. Traductorul este parte componentă a dispozitivului de automatizare din structura unui Sistem de Reglare Automată (SRA). Rolul traductorului este acela de a furniza informația referitoare la valoarea curentă a mărimii reglate, prin măsurare. Un traductor este compus din două elemente: • elementul sensibil (senzorul) - care preia mărimea ce trebuie măsurată și o transformă într-o mărime de natură mecanică, de obicei o deplasare; • adaptorul - care transformă mărimea mecanică într-o mărime electrică sau pneumatică, ce poate fi ulterior prelucrată în cadrul SRA. Adaptorul realizează, de asemenea, amplificarea și filtrarea semnalului de intrare, primit de la senzor și compensarea comportamentului neliniar al senzorului. Semnalul transmis de traductor poate fi: • analogic o în tensiune: 0…5 V, 0…10 V sau -5…+5 V; o în curent: 2…10 mA sau 4…20 mA. • numeric o logic: 0 sau 1; o în impulsuri: o cu frecvență variabilă; o cu lățime de impuls variabilă; o mesaj numeric (vezi capitolul 6). Aprecierea performanțelor unui traductor se poate face pe baza următoarelor caracteristici: • pragul de insensibilitate (rezoluția) - reprezintă cea mai mică variație a mărimii de intrare care produce o variație sesizabilă asupra mărimii de ieșire; • liniaritatea - este proprietatea traductorului de a avea o caracteristică cât mai liniară; • reproductibilitatea - este proprietatea de a se obține rezultate cât mai apropiate în cazul repetării, în condiții identice, a operației de măsurare; • fidelitatea - este proprietatea de a se obține rezultate cât mai puțin influențate de acțiunea factorilor perturbatori interni și externi; • timpul de răspuns - timpul de stabilizare a mărimii de ieșire la o variație bruscă a mărimii de intrare; • precizia - gradul de exactitate al operației de măsurare; • fiabilitatea - proprietatea traductorului de funcționa în limita unor performanțe impuse și în condiții de exploatare date, un interval de timp cât mai mare; • simplitatea; robustețea; prețul de cost, etc. Traductoarele inteligente conțin în structura lor, pe lângă traductorul clasic, un microcontroller. Acest tip de traductor îndeplinește funcții suplimentare, în comparație cu cel clasic, cum ar fi: • afișarea locală a valorii măsurate; • auto-calibrarea dispozitivului de măsurare; • codificarea informației transmise; 11
Transcript of 2 CAPITOLUL 2 Traductoare - tmt.ugal.ro · PDF fileBibliografie 2 CAPITOLUL 2 Traductoare...
Bibliografie
2 CAPITOLUL 2 Traductoare
Acest capitol este dedicat prezentării structurii și funcționării celor mai frecvent utilizate traductoare, și anume: traductorul de debit, nivel, presiune, temperatură, poziție și viteză. Traductorul este parte componentă a dispozitivului de automatizare din structura unui Sistem de Reglare Automată (SRA). Rolul traductorului este acela de a furniza informația referitoare la valoarea curentă a mărimii reglate, prin măsurare. Un traductor este compus din două elemente:
• elementul sensibil (senzorul) - care preia mărimea ce trebuie măsurată și o transformă într-o mărime de natură mecanică, de obicei o deplasare;
• adaptorul - care transformă mărimea mecanică într-o mărime electrică sau pneumatică, ce poate fi ulterior prelucrată în cadrul SRA. Adaptorul realizează, de asemenea, amplificarea și filtrarea semnalului de intrare, primit de la senzor și compensarea comportamentului neliniar al senzorului.
Semnalul transmis de traductor poate fi:
• analogic o în tensiune: 0…5 V, 0…10 V sau -5…+5 V; o în curent: 2…10 mA sau 4…20 mA.
• numeric o logic: 0 sau 1; o în impulsuri: o cu frecvență variabilă; o cu lățime de impuls variabilă; o mesaj numeric (vezi capitolul 6).
Aprecierea performanțelor unui traductor se poate face pe baza următoarelor caracteristici:
• pragul de insensibilitate (rezoluția) - reprezintă cea mai mică variație a mărimii de intrare care produce o variație sesizabilă asupra mărimii de ieșire;
• liniaritatea - este proprietatea traductorului de a avea o caracteristică cât mai liniară; • reproductibilitatea - este proprietatea de a se obține rezultate cât mai apropiate în cazul
repetării, în condiții identice, a operației de măsurare; • fidelitatea - este proprietatea de a se obține rezultate cât mai puțin influențate de acțiunea
factorilor perturbatori interni și externi; • timpul de răspuns - timpul de stabilizare a mărimii de ieșire la o variație bruscă a mărimii de
intrare; • precizia - gradul de exactitate al operației de măsurare; • fiabilitatea - proprietatea traductorului de funcționa în limita unor performanțe impuse și în
condiții de exploatare date, un interval de timp cât mai mare; • simplitatea; robustețea; prețul de cost, etc. Traductoarele inteligente conțin în structura lor, pe lângă traductorul clasic, un microcontroller. Acest tip de traductor îndeplinește funcții suplimentare, în comparație cu cel clasic, cum ar fi:
• afișarea locală a valorii măsurate; • auto-calibrarea dispozitivului de măsurare; • codificarea informației transmise;
11
CAPITOLUL 2 Traductoare
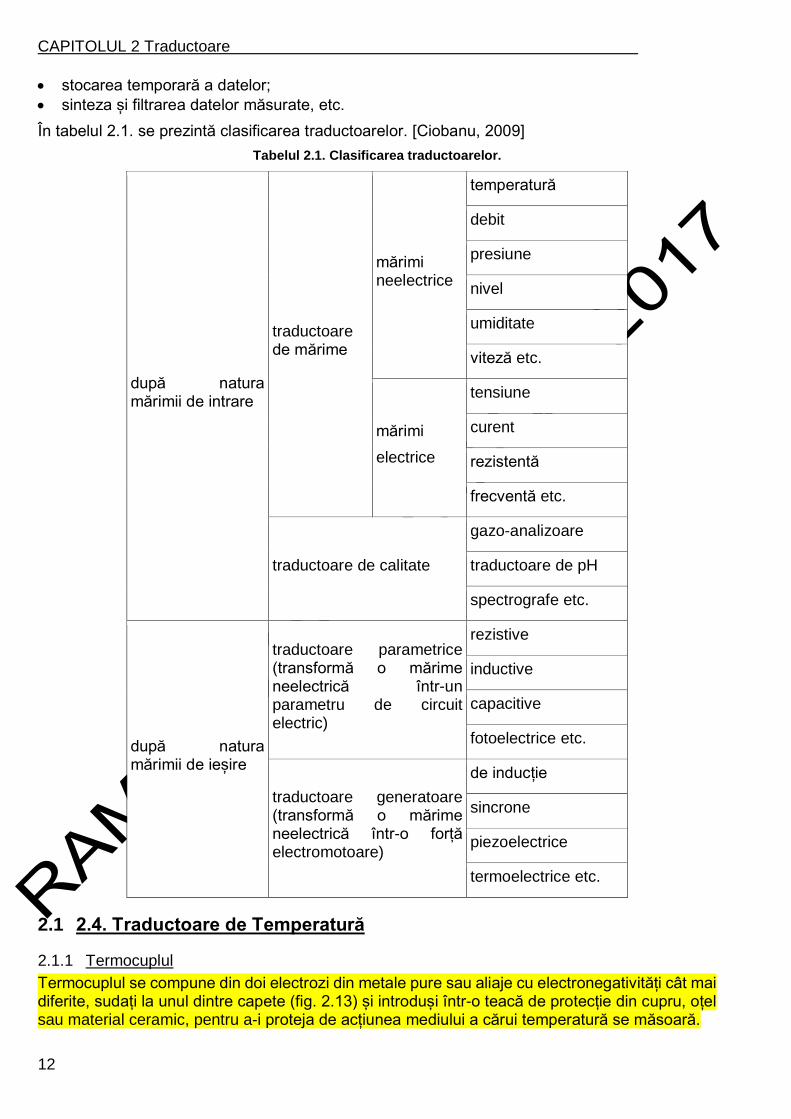
• stocarea temporară a datelor; • sinteza și filtrarea datelor măsurate, etc. În tabelul 2.1. se prezintă clasificarea traductoarelor. [Ciobanu, 2009]
Tabelul 2.1. Clasificarea traductoarelor.
după natura mărimii de intrare
traductoare de mărime
mărimi neelectrice
temperatură
debit
presiune
nivel
umiditate
viteză etc.
mărimi electrice
tensiune
curent
rezistentă
frecventă etc.
traductoare de calitate
gazo-analizoare
traductoare de pH
spectrografe etc.
după natura mărimii de ieșire
traductoare parametrice (transformă o mărime neelectrică într-un parametru de circuit electric)
rezistive
inductive
capacitive
fotoelectrice etc.
traductoare generatoare (transformă o mărime neelectrică într-o forță electromotoare)
de inducție
sincrone
piezoelectrice
termoelectrice etc.
2.1 2.4. Traductoare de Temperatură
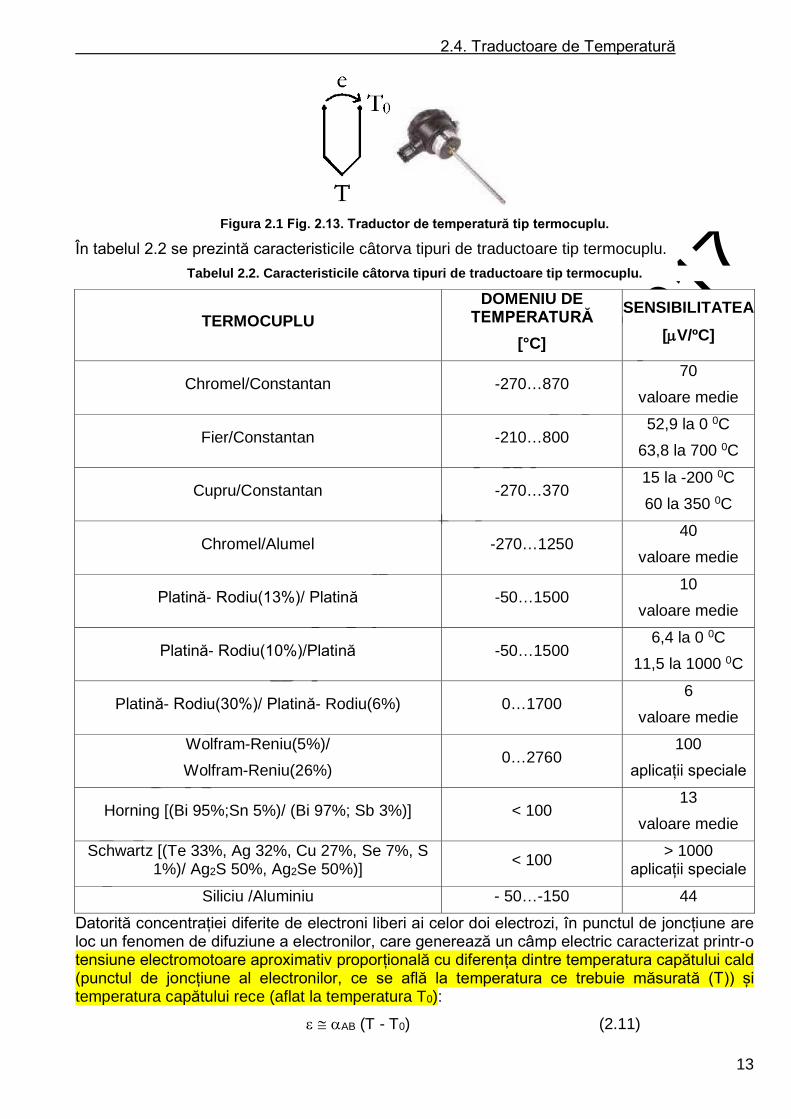
2.1.1 Termocuplul Termocuplul se compune din doi electrozi din metale pure sau aliaje cu electronegativități cât mai diferite, sudați la unul dintre capete (fig. 2.13) și introduși într-o teacă de protecție din cupru, oțel sau material ceramic, pentru a-i proteja de acțiunea mediului a cărui temperatură se măsoară.
12
2.4. Traductoare de Temperatură
Figura 2.1 Fig. 2.13. Traductor de temperatură tip termocuplu.
În tabelul 2.2 se prezintă caracteristicile câtorva tipuri de traductoare tip termocuplu. Tabelul 2.2. Caracteristicile câtorva tipuri de traductoare tip termocuplu.
TERMOCUPLU DOMENIU DE
TEMPERATURĂ [°C]
SENSIBILITATEA [µV/ºC]
Chromel/Constantan -270…870 70
valoare medie
Fier/Constantan -210…800 52,9 la 0 0C
63,8 la 700 0C
Cupru/Constantan -270…370 15 la -200 0C 60 la 350 0C
Chromel/Alumel -270…1250 40
valoare medie
Platină- Rodiu(13%)/ Platină -50…1500 10
valoare medie
Platină- Rodiu(10%)/Platină -50…1500 6,4 la 0 0C
11,5 la 1000 0C
Platină- Rodiu(30%)/ Platină- Rodiu(6%) 0…1700 6
valoare medie
Wolfram-Reniu(5%)/ Wolfram-Reniu(26%)
0…2760 100
aplicații speciale
Horning [(Bi 95%;Sn 5%)/ (Bi 97%; Sb 3%)] < 100 13
valoare medie
Schwartz [(Te 33%, Ag 32%, Cu 27%, Se 7%, S 1%)/ Ag2S 50%, Ag2Se 50%)] < 100 > 1000
aplicații speciale
Siliciu /Aluminiu - 50…-150 44
Datorită concentrației diferite de electroni liberi ai celor doi electrozi, în punctul de joncțiune are loc un fenomen de difuziune a electronilor, care generează un câmp electric caracterizat printr-o tensiune electromotoare aproximativ proporțională cu diferența dintre temperatura capătului cald (punctul de joncțiune al electronilor, ce se află la temperatura ce trebuie măsurată (T)) și temperatura capătului rece (aflat la temperatura T0):
ε ≅ αAB (T - T0) (2.11)
13
CAPITOLUL 2 Traductoare
Deoarece valoarea coeficientului αAB este ușor dependentă de diferența de temperatură (T - T0), caracteristicile statice ale termocuplurilor sunt ușor neliniare.
2.1.2 Termorezistența Acest tip de traductor de temperatură funcționează pe baza variației rezistenței electrice a unor metale pure sau semiconductoare cu temperatura. Traductorul este alcătuit dintr-un fir subțire de metal pur (platină, cupru, nichel) bobinat neinductiv pe un suport izolator (sticlă, ceramică) introduc într-o teacă de protecție. De obicei se utilizează termorezistențele din platină, datorită avantajelor multiple ale acesteia: are punct de topire ridicat, se poate trefila la diametre mici, nu se oxidează, are o dependență aproape liniară cu temperatura:
R ≅ R0 [1 + α(T - T0)], (2.12)
În care R este valoarea termorezistenței la temperatura de referință T0 = 0°C, iar α este sensibilitatea relativă medie pe intervalul T0... T.
Rezistența nominală a dispozitivelor este de 25, 50, 100, 500 sau 1000 Ω la 0 ºC, ultimele variante fiind recomandate pentru temperaturi scăzute. Termorezistențele executate în țară se confecționează din platină, cu rezistențe nominale de 50 și 100 Ω, de tipul PT 50 și PT 100, fiind confecționate din fire cu diametre între 0,05...0,2 mm, cu lungimi de ordinul 5...20 cm, firele de legătură la blocul de borne fiind de nichel, cu diametru mult mai mare, în scopul neglijării variației rezistenței acestora cu temperatura. Din cauza diametrului mic al firului de platină, termorezistența se utilizează rar la măsurarea unor temperaturi mai mari de 400 °C.
2.1.3 Termistorul Acest tip de traductor este fabricat din elemente semiconductoare fabricate din amestecuri de oxizi de mangan, nichel, cobalt, fier, sinterizate la temperaturi de peste 1000 °C sub formă de plăcuțe, pastile sau baghete cu dimensiuni care variază de la câteva sutimi de mm la câțiva cm.
Rezistența electrică a termistorului (R) variază invers cu temperatura după o lege exponențială de forma:
R = R0·eα(1/T - 1/T0), α > 0 (2.13)
Domeniul de măsură este cuprins între -100 și 300 °C. Acest traductor prezintă avantajul sensibilității foarte ridicate, putând atinge rezoluții până la 0,01 ºC.
2.1.4 Traductorul cu cuarț Acest tip de traductor se caracterizează printr-o dependență liniară a frecvenței de rezonanță a cristalului cu temperatura. Sensibilitatea este aproximativ de 1 kHz / °C și un timp de răspuns foarte scurt, circa o secundă.
14
2.3. Traductoare de presiune
2.1.5 Traductorul bazat pe radiația termică (pirometrul) Acest traductor permite măsurarea temperaturii corpurilor supraîncălzite, fără a intra în contact direct cu acestea. Pirometrul de radiație totală funcționează pe baza dependenței puterii radiației emise de o unitate de suprafață a corpului încălzit de temperatura absolută a acestuia. Pirometrul optic are la baza funcționării dependența frecvenței radiațiilor termice emise de un corp supraîncălzit de temperatură. Această frecvență determină culoarea corpului incandescent. Temperatura se determină prin compararea culorii corpului incandescent cu cea a unui filament alimenta la o tensiune variabilă. Tensiunea este modificată de operator până când filamentul devine neobservabil pe fondul culorii corpului încălzit. Valoarea acestei tensiuni este o măsură a temperaturii corpului încălzit.
2.2 2.3. Traductoare de presiune Cele mai utilizate tipuri de traductoare sunt cele care funcționează pe baza deformării unor corpuri elastice sau pe baza schimbării proprietății anumitor corpuri cu presiunea.
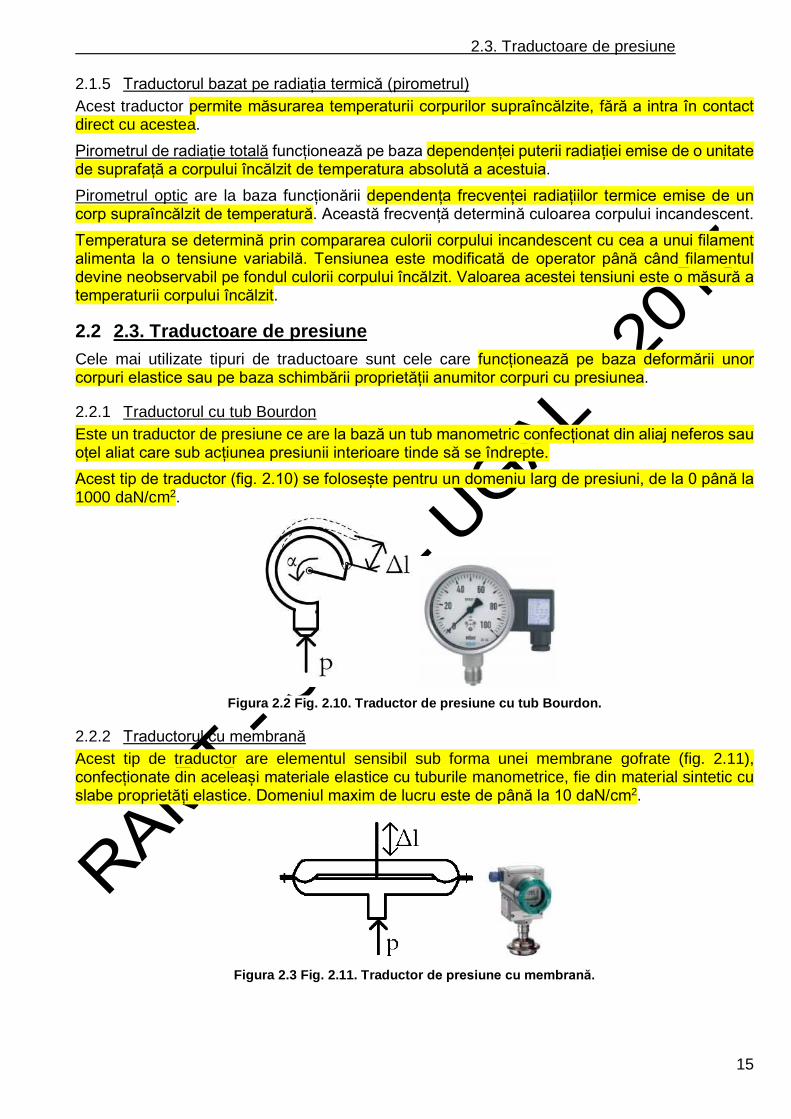
2.2.1 Traductorul cu tub Bourdon Este un traductor de presiune ce are la bază un tub manometric confecționat din aliaj neferos sau oțel aliat care sub acțiunea presiunii interioare tinde să se îndrepte. Acest tip de traductor (fig. 2.10) se folosește pentru un domeniu larg de presiuni, de la 0 până la 1000 daN/cm2.
Figura 2.2 Fig. 2.10. Traductor de presiune cu tub Bourdon.
2.2.2 Traductorul cu membrană Acest tip de traductor are elementul sensibil sub forma unei membrane gofrate (fig. 2.11), confecționate din aceleași materiale elastice cu tuburile manometrice, fie din material sintetic cu slabe proprietăți elastice. Domeniul maxim de lucru este de până la 10 daN/cm2.
Figura 2.3 Fig. 2.11. Traductor de presiune cu membrană.
15
CAPITOLUL 2 Traductoare
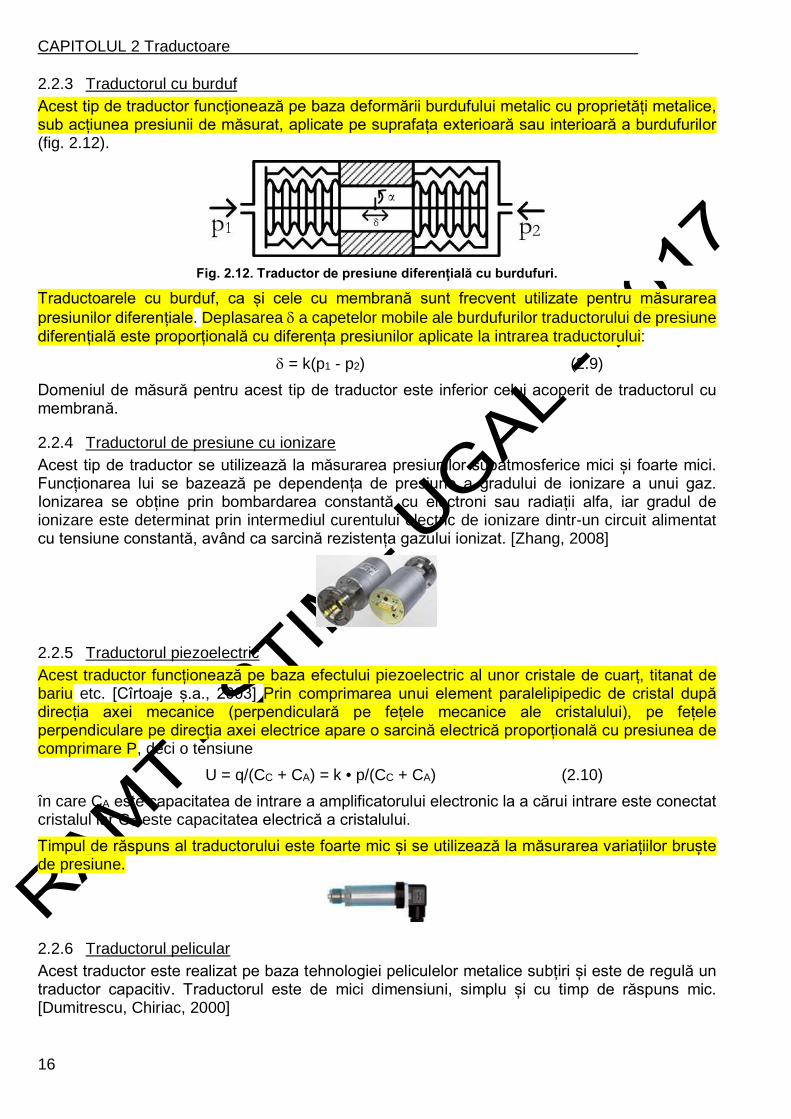
2.2.3 Traductorul cu burduf Acest tip de traductor funcționează pe baza deformării burdufului metalic cu proprietăți metalice, sub acțiunea presiunii de măsurat, aplicate pe suprafața exterioară sau interioară a burdufurilor (fig. 2.12).
Fig. 2.12. Traductor de presiune diferențială cu burdufuri.
Traductoarele cu burduf, ca și cele cu membrană sunt frecvent utilizate pentru măsurarea presiunilor diferențiale. Deplasarea δ a capetelor mobile ale burdufurilor traductorului de presiune diferențială este proporțională cu diferența presiunilor aplicate la intrarea traductorului: δ = k(p1 - p2) (2.9) Domeniul de măsură pentru acest tip de traductor este inferior celui acoperit de traductorul cu membrană.
2.2.4 Traductorul de presiune cu ionizare Acest tip de traductor se utilizează la măsurarea presiunilor subatmosferice mici și foarte mici. Funcționarea lui se bazează pe dependența de presiune a gradului de ionizare a unui gaz. Ionizarea se obține prin bombardarea constantă cu electroni sau radiații alfa, iar gradul de ionizare este determinat prin intermediul curentului electric de ionizare dintr-un circuit alimentat cu tensiune constantă, având ca sarcină rezistența gazului ionizat. [Zhang, 2008]
2.2.5 Traductorul piezoelectric Acest traductor funcționează pe baza efectului piezoelectric al unor cristale de cuarț, titanat de bariu etc. [Cîrtoaje ș.a., 2003] Prin comprimarea unui element paralelipipedic de cristal după direcția axei mecanice (perpendiculară pe fețele mecanice ale cristalului), pe fețele perpendiculare pe direcția axei electrice apare o sarcină electrică proporțională cu presiunea de comprimare P, deci o tensiune U = q/(CC + CA) = k • p/(CC + CA) (2.10) în care CA este capacitatea de intrare a amplificatorului electronic la a cărui intrare este conectat cristalul iar CC este capacitatea electrică a cristalului. Timpul de răspuns al traductorului este foarte mic și se utilizează la măsurarea variațiilor bruște de presiune.
2.2.6 Traductorul pelicular Acest traductor este realizat pe baza tehnologiei peliculelor metalice subțiri și este de regulă un traductor capacitiv. Traductorul este de mici dimensiuni, simplu și cu timp de răspuns mic. [Dumitrescu, Chiriac, 2000]
16
2.2. Traductoare de nivel
2.3 2.2. Traductoare de nivel
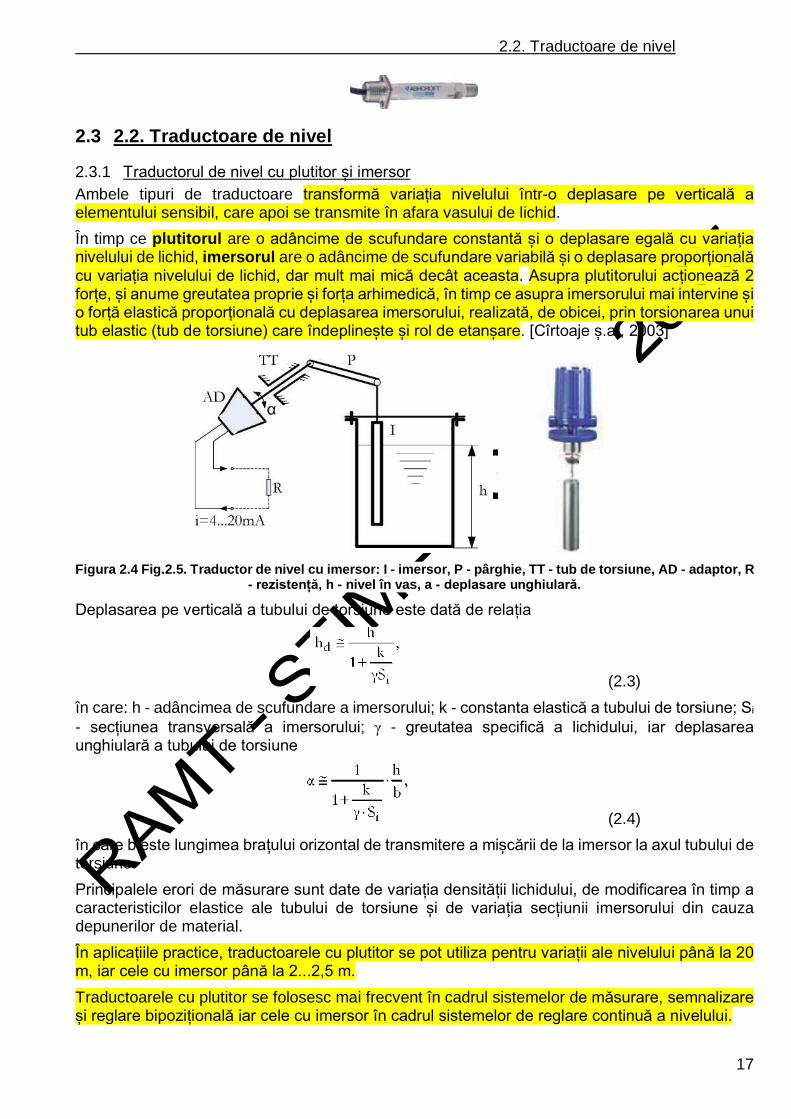
2.3.1 Traductorul de nivel cu plutitor și imersor Ambele tipuri de traductoare transformă variația nivelului într-o deplasare pe verticală a elementului sensibil, care apoi se transmite în afara vasului de lichid. În timp ce plutitorul are o adâncime de scufundare constantă și o deplasare egală cu variația nivelului de lichid, imersorul are o adâncime de scufundare variabilă și o deplasare proporțională cu variația nivelului de lichid, dar mult mai mică decât aceasta. Asupra plutitorului acționează 2 forțe, și anume greutatea proprie și forța arhimedică, în timp ce asupra imersorului mai intervine și o forță elastică proporțională cu deplasarea imersorului, realizată, de obicei, prin torsionarea unui tub elastic (tub de torsiune) care îndeplinește și rol de etanșare. [Cîrtoaje ș.a., 2003]
Figura 2.4 Fig.2.5. Traductor de nivel cu imersor: I - imersor, P - pârghie, TT - tub de torsiune, AD - adaptor, R
- rezistență, h - nivel în vas, a - deplasare unghiulară.
Deplasarea pe verticală a tubului de torsiune este dată de relația
(2.3) în care: h - adâncimea de scufundare a imersorului; k - constanta elastică a tubului de torsiune; Si - secțiunea transversală a imersorului; γ - greutatea specifică a lichidului, iar deplasarea unghiulară a tubului de torsiune
(2.4) în care b este lungimea brațului orizontal de transmitere a mișcării de la imersor la axul tubului de torsiune. Principalele erori de măsurare sunt date de variația densității lichidului, de modificarea în timp a caracteristicilor elastice ale tubului de torsiune și de variația secțiunii imersorului din cauza depunerilor de material. În aplicațiile practice, traductoarele cu plutitor se pot utiliza pentru variații ale nivelului până la 20 m, iar cele cu imersor până la 2...2,5 m. Traductoarele cu plutitor se folosesc mai frecvent în cadrul sistemelor de măsurare, semnalizare și reglare bipozițională iar cele cu imersor în cadrul sistemelor de reglare continuă a nivelului.
17
CAPITOLUL 2 Traductoare
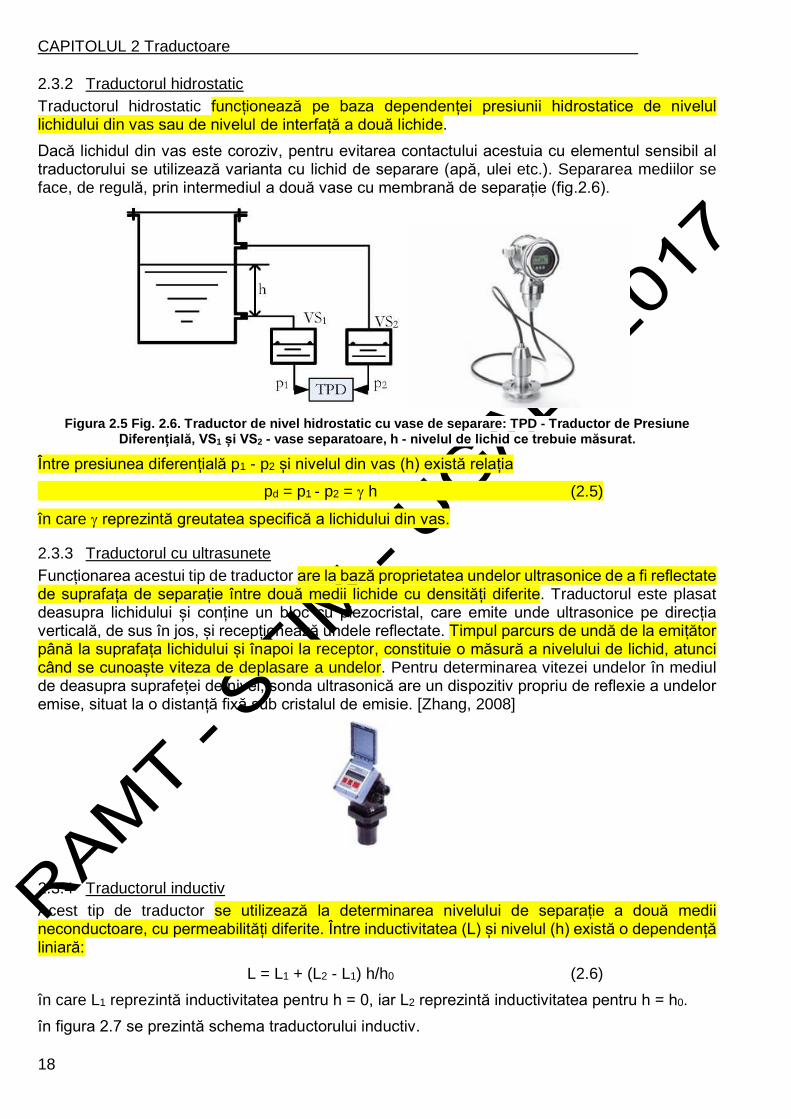
2.3.2 Traductorul hidrostatic Traductorul hidrostatic funcționează pe baza dependenței presiunii hidrostatice de nivelul lichidului din vas sau de nivelul de interfață a două lichide. Dacă lichidul din vas este coroziv, pentru evitarea contactului acestuia cu elementul sensibil al traductorului se utilizează varianta cu lichid de separare (apă, ulei etc.). Separarea mediilor se face, de regulă, prin intermediul a două vase cu membrană de separație (fig.2.6).
Figura 2.5 Fig. 2.6. Traductor de nivel hidrostatic cu vase de separare: TPD - Traductor de Presiune
Diferențială, VS1 și VS2 - vase separatoare, h - nivelul de lichid ce trebuie măsurat.
Între presiunea diferențială p1 - p2 și nivelul din vas (h) există relația
pd = p1 - p2 = γ h (2.5)
în care γ reprezintă greutatea specifică a lichidului din vas.
2.3.3 Traductorul cu ultrasunete Funcționarea acestui tip de traductor are la bază proprietatea undelor ultrasonice de a fi reflectate de suprafața de separație între două medii lichide cu densități diferite. Traductorul este plasat deasupra lichidului și conține un bloc cu piezocristal, care emite unde ultrasonice pe direcția verticală, de sus în jos, și recepționează undele reflectate. Timpul parcurs de undă de la emițător până la suprafața lichidului și înapoi la receptor, constituie o măsură a nivelului de lichid, atunci când se cunoaște viteza de deplasare a undelor. Pentru determinarea vitezei undelor în mediul de deasupra suprafeței de nivel, sonda ultrasonică are un dispozitiv propriu de reflexie a undelor emise, situat la o distanță fixă sub cristalul de emisie. [Zhang, 2008]
2.3.4 Traductorul inductiv Acest tip de traductor se utilizează la determinarea nivelului de separație a două medii neconductoare, cu permeabilități diferite. Între inductivitatea (L) și nivelul (h) există o dependență liniară: L = L1 + (L2 - L1) h/h0 (2.6) în care L1 reprezintă inductivitatea pentru h = 0, iar L2 reprezintă inductivitatea pentru h = h0. în figura 2.7 se prezintă schema traductorului inductiv.
18
2.5. Traductoare de poziție
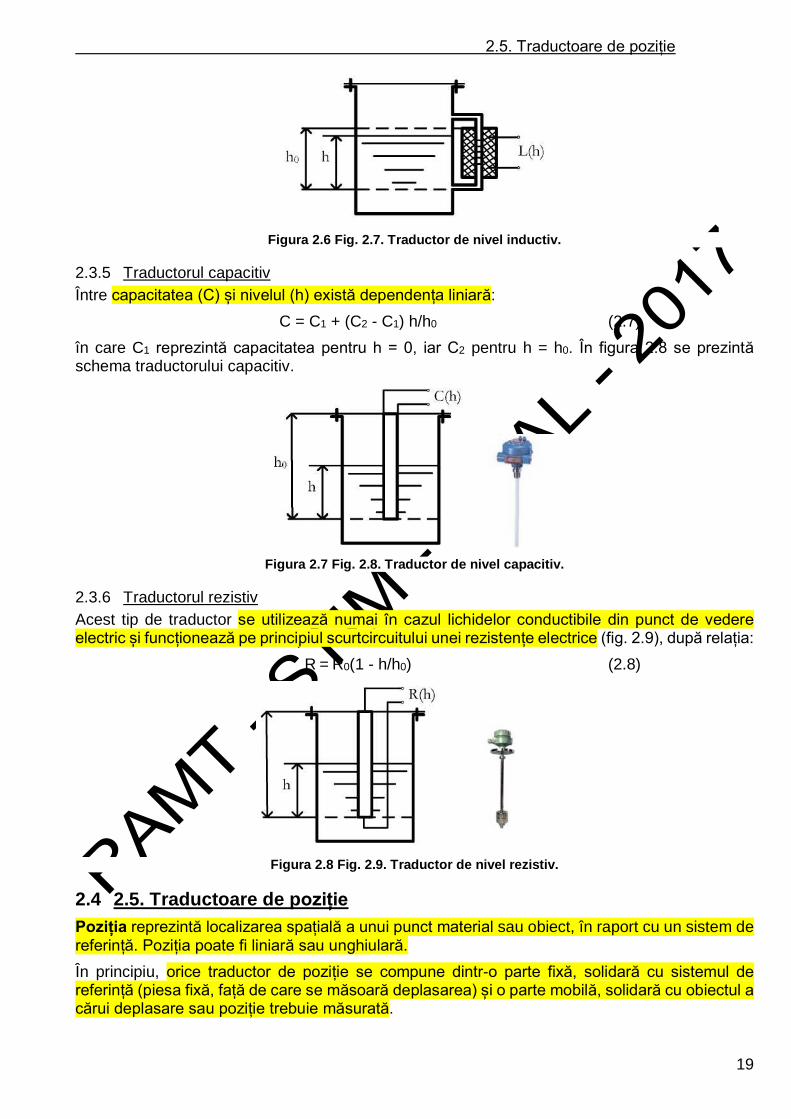
Figura 2.6 Fig. 2.7. Traductor de nivel inductiv.
2.3.5 Traductorul capacitiv Între capacitatea (C) și nivelul (h) există dependența liniară: C = C1 + (C2 - C1) h/h0 (2.7) în care C1 reprezintă capacitatea pentru h = 0, iar C2 pentru h = h0. În figura 2.8 se prezintă schema traductorului capacitiv.
Figura 2.7 Fig. 2.8. Traductor de nivel capacitiv.
2.3.6 Traductorul rezistiv Acest tip de traductor se utilizează numai în cazul lichidelor conductibile din punct de vedere electric și funcționează pe principiul scurtcircuitului unei rezistențe electrice (fig. 2.9), după relația: R = R0(1 - h/h0) (2.8)
Figura 2.8 Fig. 2.9. Traductor de nivel rezistiv.
2.4 2.5. Traductoare de poziție Poziția reprezintă localizarea spațială a unui punct material sau obiect, în raport cu un sistem de referință. Poziția poate fi liniară sau unghiulară. În principiu, orice traductor de poziție se compune dintr-o parte fixă, solidară cu sistemul de referință (piesa fixă, față de care se măsoară deplasarea) și o parte mobilă, solidară cu obiectul a cărui deplasare sau poziție trebuie măsurată.
19
CAPITOLUL 2 Traductoare
2.4.1 Traductorul cu senzori rezistivi Principiul de funcționare al acestui tip de traductor are la bază dependența liniară dintre rezistența electrică a unui conductor și lungimea lui, conform relației: [Ciobanu, 2009]
R = ρ l/s (2.14)
în care: R este rezistența; ρ - rezistivitatea materialului; l - lungimea; s - secțiunea conductorului. Conectarea cursorului potențiometrului la elementul mobil permite măsurarea unei tensiuni:
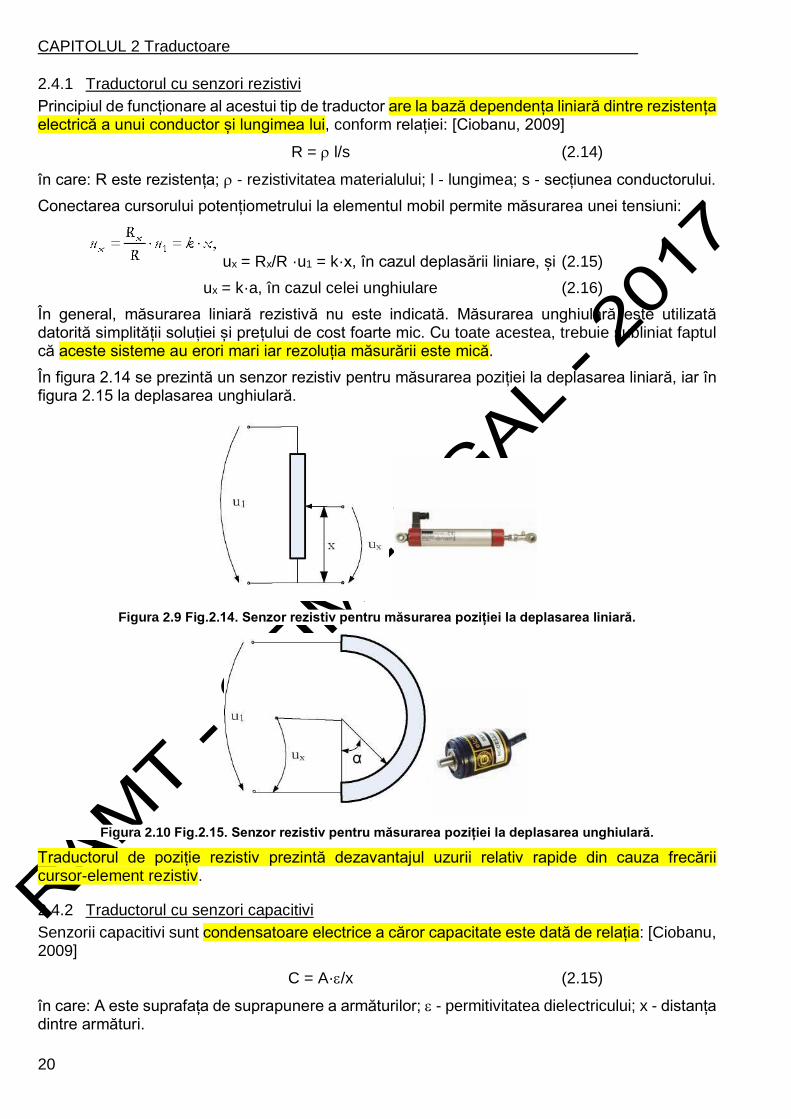
ux = Rx/R ·u1 = k·x, în cazul deplasării liniare, și (2.15) ux = k·a, în cazul celei unghiulare (2.16) În general, măsurarea liniară rezistivă nu este indicată. Măsurarea unghiulară este utilizată datorită simplității soluției și prețului de cost foarte mic. Cu toate acestea, trebuie subliniat faptul că aceste sisteme au erori mari iar rezoluția măsurării este mică. În figura 2.14 se prezintă un senzor rezistiv pentru măsurarea poziției la deplasarea liniară, iar în figura 2.15 la deplasarea unghiulară.
Figura 2.9 Fig.2.14. Senzor rezistiv pentru măsurarea poziției la deplasarea liniară.
Figura 2.10 Fig.2.15. Senzor rezistiv pentru măsurarea poziției la deplasarea unghiulară.
Traductorul de poziție rezistiv prezintă dezavantajul uzurii relativ rapide din cauza frecării cursor-element rezistiv.
2.4.2 Traductorul cu senzori capacitivi Senzorii capacitivi sunt condensatoare electrice a căror capacitate este dată de relația: [Ciobanu, 2009]
C = A·ε/x (2.15)
în care: A este suprafața de suprapunere a armăturilor; ε - permitivitatea dielectricului; x - distanța dintre armături.
20
2.5. Traductoare de poziție
Un tip de traductor capacitiv este cel la care una dintre armăturile condensatorului este fixă iar cealaltă este mobilă, prinsă de elementul a cărui poziție se măsoară. Variațiile de rezistență (cazul traductorului cu senzori rezistivi) sau capacitate electrică (cazul traductorului cu senzori capacitivi), de la ieșirea senzorului parametric, sunt convertite în tensiune sau curent electric, de către adaptorul electronic. Montajul de măsurare oferă un semnal electric (tensiune de dezechilibru) dependent de variația rezistenței sau a capacității, care este apoi amplificat și aplicat unui etaj de ieșire, care îl convertește în semnal unificat. Eliminarea influenței semnalelor perturbatoare se asigură prevăzând adaptorului o buclă de reacție negativă. Efectul neliniarităților introduse de elementul sensibil sau de schema de măsurare este compensat de blocuri de liniarizare, introduse pe calea directă sau pe cea de reacție.
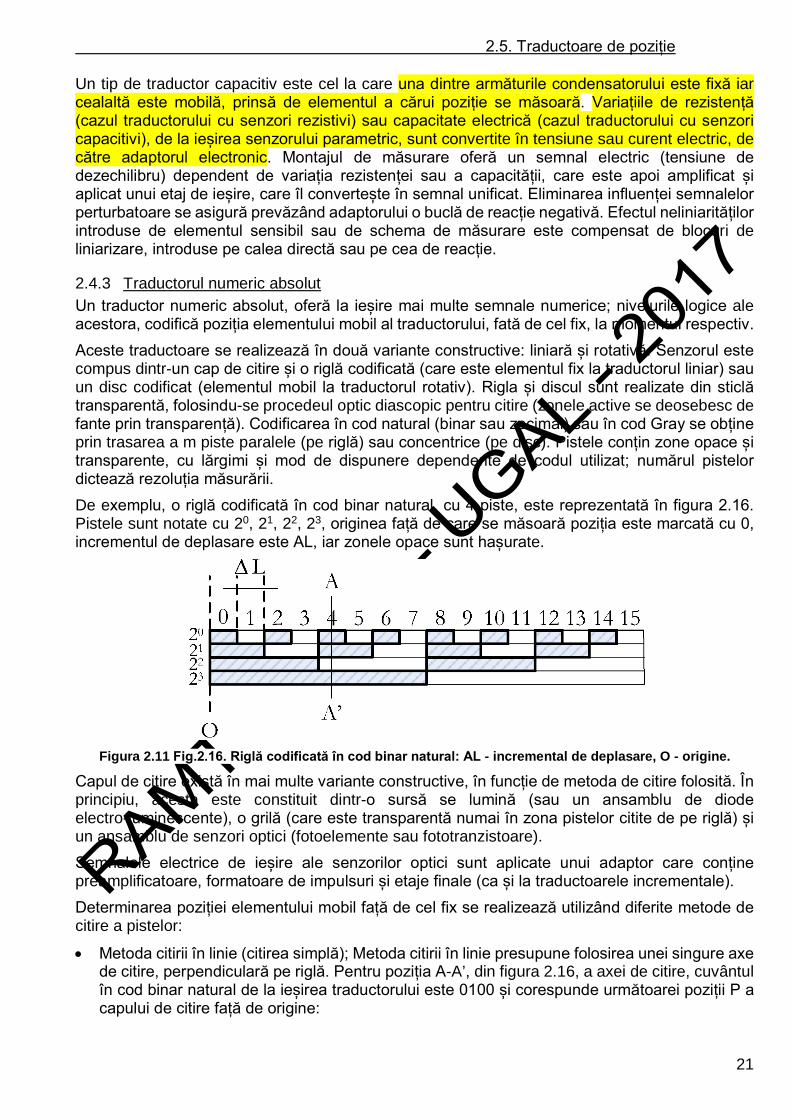
2.4.3 Traductorul numeric absolut Un traductor numeric absolut, oferă la ieșire mai multe semnale numerice; nivelurile logice ale acestora, codifică poziția elementului mobil al traductorului, fată de cel fix, la momentul respectiv. Aceste traductoare se realizează în două variante constructive: liniară și rotativă. Senzorul este compus dintr-un cap de citire și o riglă codificată (care este elementul fix la traductorul liniar) sau un disc codificat (elementul mobil la traductorul rotativ). Rigla și discul sunt realizate din sticlă transparentă, folosindu-se procedeul optic diascopic pentru citire (zonele active se deosebesc de fante prin transparență). Codificarea în cod natural (binar sau zecimal) sau în cod Gray se obține prin trasarea a m piste paralele (pe riglă) sau concentrice (pe disc). Pistele conțin zone opace și transparente, cu lărgimi și mod de dispunere dependente de codul utilizat; numărul pistelor dictează rezoluția măsurării. De exemplu, o riglă codificată în cod binar natural, cu 4 piste, este reprezentată în figura 2.16. Pistele sunt notate cu 20, 21, 22, 23, originea față de care se măsoară poziția este marcată cu 0, incrementul de deplasare este AL, iar zonele opace sunt hașurate.
Figura 2.11 Fig.2.16. Riglă codificată în cod binar natural: AL - incremental de deplasare, O - origine.
Capul de citire există în mai multe variante constructive, în funcție de metoda de citire folosită. În principiu, acesta este constituit dintr-o sursă se lumină (sau un ansamblu de diode electro-luminescente), o grilă (care este transparentă numai în zona pistelor citite de pe riglă) și un ansamblu de senzori optici (fotoelemente sau fototranzistoare). Semnalele electrice de ieșire ale senzorilor optici sunt aplicate unui adaptor care conține preamplificatoare, formatoare de impulsuri și etaje finale (ca și la traductoarele incrementale). Determinarea poziției elementului mobil față de cel fix se realizează utilizând diferite metode de citire a pistelor:
• Metoda citirii în linie (citirea simplă); Metoda citirii în linie presupune folosirea unei singure axe de citire, perpendiculară pe riglă. Pentru poziția A-A’, din figura 2.16, a axei de citire, cuvântul în cod binar natural de la ieșirea traductorului este 0100 și corespunde următoarei poziții P a capului de citire față de origine:
21
CAPITOLUL 2 Traductoare
P = (0 • 20 + 0 • 21 +1 • 22 + 0 • 23) -AL = 4 -AL (2.16) La citirea în linie, rezoluția măsurării este AL. Capul de citire conține o sursă de lumină și 4 fotoelemente centrate pe cele 4 piste sau câte o pereche LED- fototranzistor pentru fiecare pistă. Această metodă conduce la citiri eronate, din cauza erorilor inerente de fabricație a riglei (pasul de divizare al unei piste nu este constant pe toată lungimea ei) sau capului de citire (senzorii optici nu sunt aliniați perfect pe axa de citire). Asemenea imperfecțiuni tehnologice conduc la măsurători false atunci când se modifică simultan gradul de transparență al mai multor (cel puțin codificate binar se recomandă următoarele soluții:
• introducerea unei piste suplimentare, pentru validarea semnalelor citite; • codificarea în cod Gray (a riglei dau discului); • folosirea a două axe de citire. Prima soluție constă în prevederea unei piste dispuse deasupra pistei 20 și conținând zone transparente foarte înguste, situate la mijlocul fiecărei zone opace sau transparente a pistei 20. Pistei suplimentare îi este asociat un senzor optic și numai la activarea lui este citit cuvântul de ieșire al traductorului. Această soluție se pretează numai la traductoarele cu AL grosier (adică nu foarte mic); în celelalte cazuri, pista suplimentară nu poate fi realizată tehnologic. Ultima soluție presupune folosirea mai multor senzori optici (câte doi pentru fiecare pistă, cu excepția celei notate cu 20), dispuși după cele două axe de citire. În funcție de dispunerea axelor de citire, se disting metoda dublei testări și metoda citirii în V. Aceste metode sunt cele mai utilizate, deși au și ele dezavantaje: capul de citire este mai lat și neeconomic.
2.5 2.1.Traductoare de debit Măsurarea debitului fluidelor se poate realiza ca urmare a modificării regimului de curgere prin intermediul unui corp fizic sau prin intermediul unor fenomene care sunt influențate de curgere.
2.5.1 Traductorul de debit cu diafragmă Principiul care stă la baza funcționării acestui tip de traductor este dependența dintre căderea de presiune pe care o suferă fluidul ce trece prin diafragmă (p1 - p2) și debitul masic de fluid (Q), (fig. 2.1).
22
2.1.Traductoare de debit
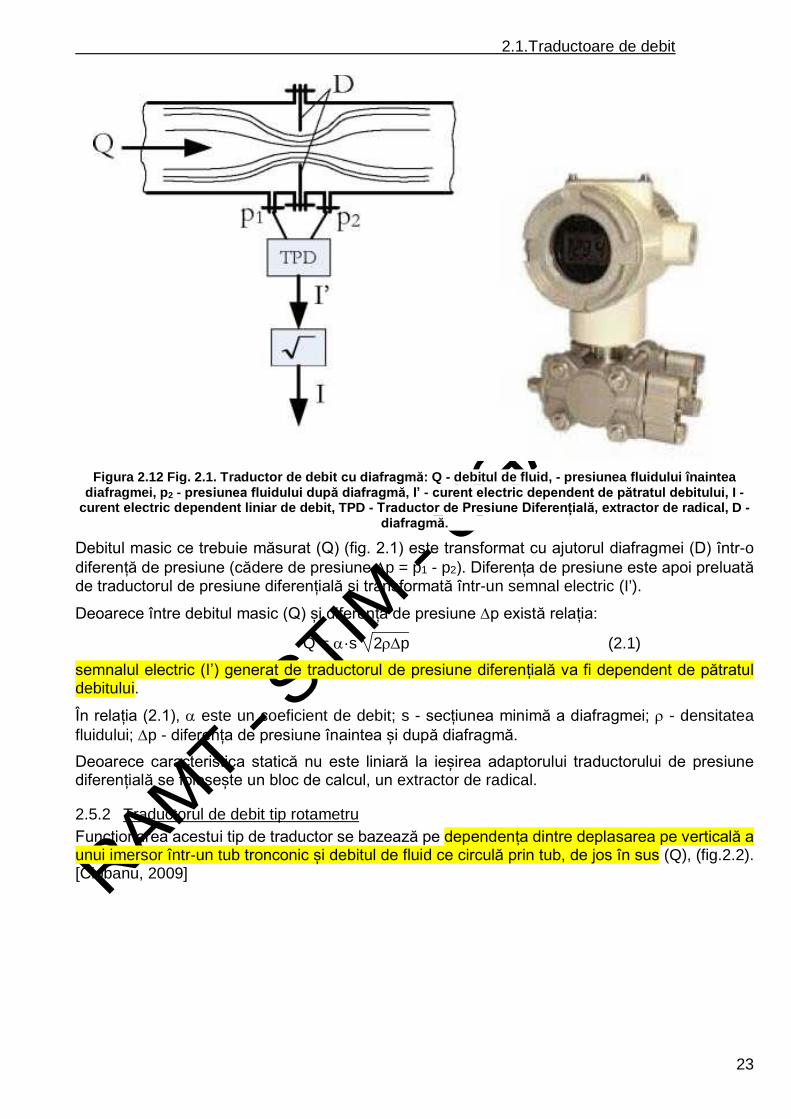
Figura 2.12 Fig. 2.1. Traductor de debit cu diafragmă: Q - debitul de fluid, - presiunea fluidului înaintea diafragmei, p2 - presiunea fluidului după diafragmă, I’ - curent electric dependent de pătratul debitului, I -
curent electric dependent liniar de debit, TPD - Traductor de Presiune Diferențială, extractor de radical, D - diafragmă.
Debitul masic ce trebuie măsurat (Q) (fig. 2.1) este transformat cu ajutorul diafragmei (D) într-o diferență de presiune (cădere de presiune ∆p = p1 - p2). Diferența de presiune este apoi preluată de traductorul de presiune diferențială și transformată într-un semnal electric (I’).
Deoarece între debitul masic (Q) și diferența de presiune ∆p există relația:
Q = α·s 2ρ∆p (2.1)
semnalul electric (I’) generat de traductorul de presiune diferențială va fi dependent de pătratul debitului.
În relația (2.1), α este un coeficient de debit; s - secțiunea minimă a diafragmei; ρ - densitatea fluidului; ∆p - diferența de presiune înaintea și după diafragmă.
Deoarece caracteristica statică nu este liniară la ieșirea adaptorului traductorului de presiune diferențială se folosește un bloc de calcul, un extractor de radical.
2.5.2 Traductorul de debit tip rotametru Funcționarea acestui tip de traductor se bazează pe dependența dintre deplasarea pe verticală a unui imersor într-un tub tronconic și debitul de fluid ce circulă prin tub, de jos în sus (Q), (fig.2.2). [Ciobanu, 2009]
23
CAPITOLUL 2 Traductoare
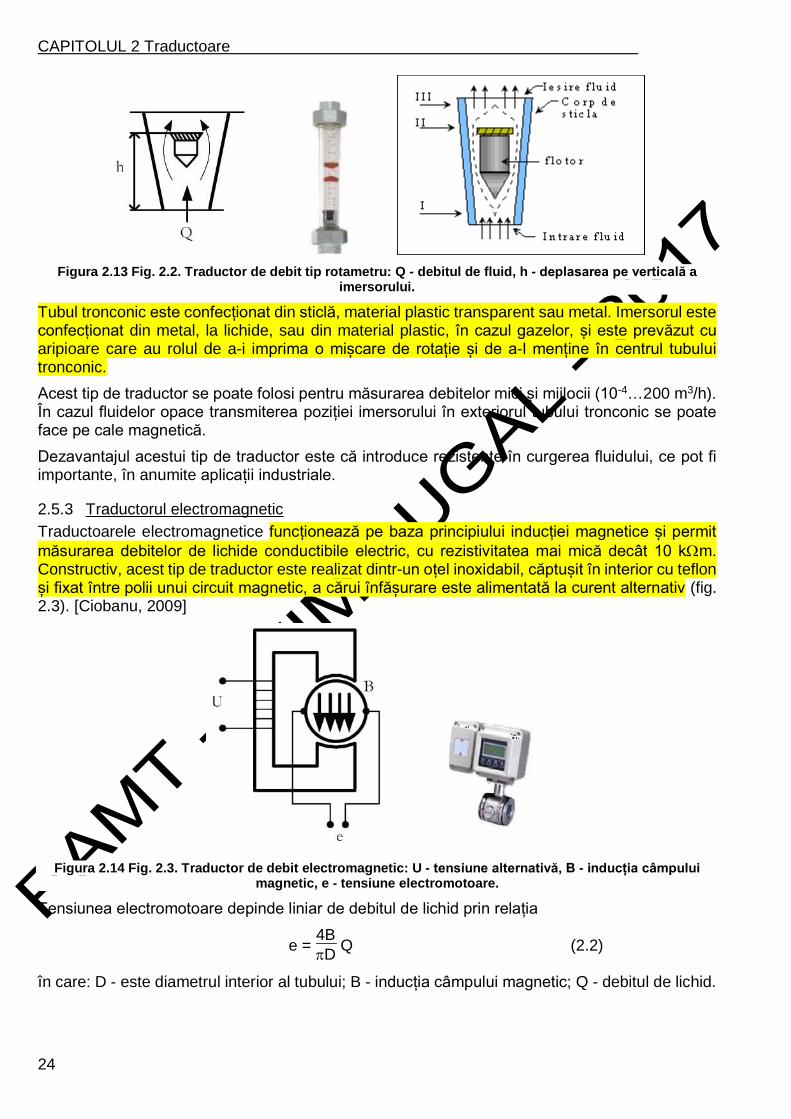
Figura 2.13 Fig. 2.2. Traductor de debit tip rotametru: Q - debitul de fluid, h - deplasarea pe verticală a
imersorului.
Tubul tronconic este confecționat din sticlă, material plastic transparent sau metal. Imersorul este confecționat din metal, la lichide, sau din material plastic, în cazul gazelor, și este prevăzut cu aripioare care au rolul de a-i imprima o mișcare de rotație și de a-l menține în centrul tubului tronconic. Acest tip de traductor se poate folosi pentru măsurarea debitelor mici și mijlocii (10-4…200 m3/h). În cazul fluidelor opace transmiterea poziției imersorului în exteriorul tubului tronconic se poate face pe cale magnetică. Dezavantajul acestui tip de traductor este că introduce rezistențe în curgerea fluidului, ce pot fi importante, în anumite aplicații industriale.
2.5.3 Traductorul electromagnetic Traductoarele electromagnetice funcționează pe baza principiului inducției magnetice și permit măsurarea debitelor de lichide conductibile electric, cu rezistivitatea mai mică decât 10 kΩm. Constructiv, acest tip de traductor este realizat dintr-un oțel inoxidabil, căptușit în interior cu teflon și fixat între polii unui circuit magnetic, a cărui înfășurare este alimentată la curent alternativ (fig. 2.3). [Ciobanu, 2009]
Figura 2.14 Fig. 2.3. Traductor de debit electromagnetic: U - tensiune alternativă, B - inducția câmpului magnetic, e - tensiune electromotoare.
Tensiunea electromotoare depinde liniar de debitul de lichid prin relația
e = 4BπD Q (2.2)
în care: D - este diametrul interior al tubului; B - inducția câmpului magnetic; Q - debitul de lichid.
24
2.6. Traductoare de viteză
Așa cum se observă din relația (2.2), rezultatul măsurării nu este influențat de densitatea și viscozitatea lichidului. Cu acest tip de traductor se pot măsura debite de lichide cu presiunea mai mică de 30 bar, într-o gamă largă (0,1...2000 m3/h)
2.5.4 Traductorul Vortex Acest tip de traductor permite măsurarea debitului pe baza frecvenței de oscilație a presiunii jetului de fluid turbionat prin intermediul unui obstacol de formă specială (element Vortex), introdus în mijlocul conductei (fig. 2.4).
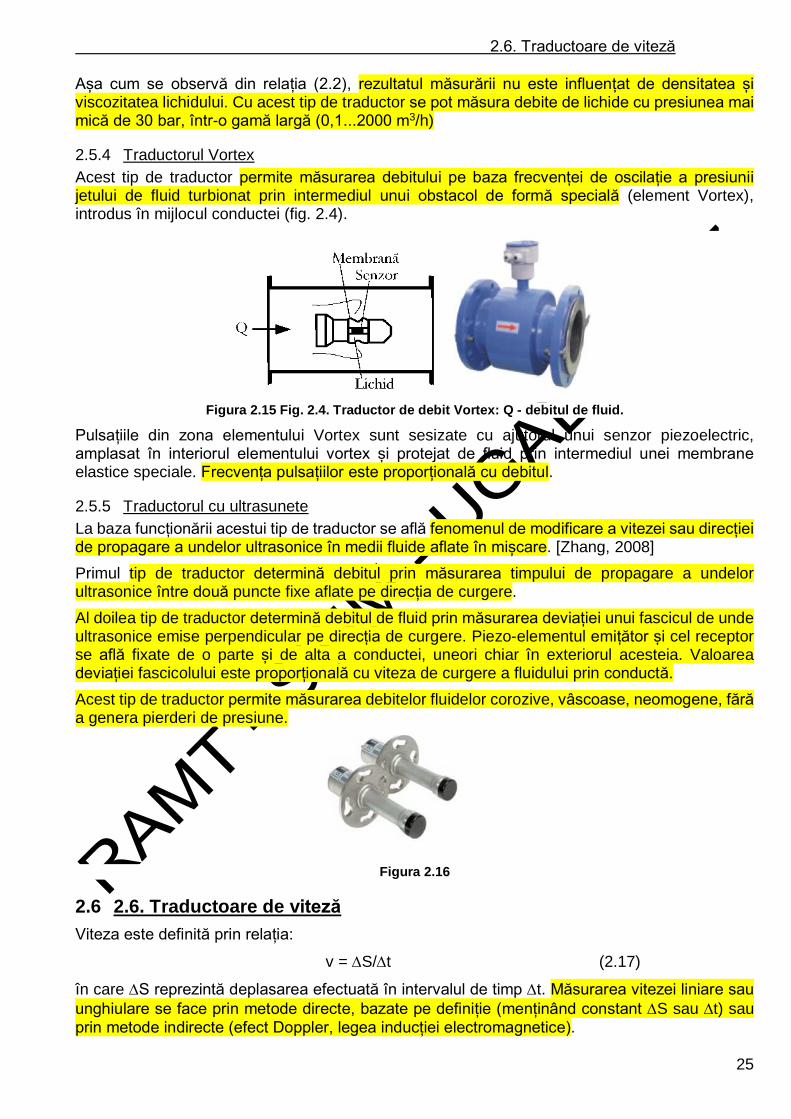
Figura 2.15 Fig. 2.4. Traductor de debit Vortex: Q - debitul de fluid.
Pulsațiile din zona elementului Vortex sunt sesizate cu ajutorul unui senzor piezoelectric, amplasat în interiorul elementului vortex și protejat de fluid prin intermediul unei membrane elastice speciale. Frecvența pulsațiilor este proporțională cu debitul.
2.5.5 Traductorul cu ultrasunete La baza funcționării acestui tip de traductor se află fenomenul de modificare a vitezei sau direcției de propagare a undelor ultrasonice în medii fluide aflate în mișcare. [Zhang, 2008] Primul tip de traductor determină debitul prin măsurarea timpului de propagare a undelor ultrasonice între două puncte fixe aflate pe direcția de curgere. Al doilea tip de traductor determină debitul de fluid prin măsurarea deviației unui fascicul de unde ultrasonice emise perpendicular pe direcția de curgere. Piezo-elementul emițător și cel receptor se află fixate de o parte și de alta a conductei, uneori chiar în exteriorul acesteia. Valoarea deviației fascicolului este proporțională cu viteza de curgere a fluidului prin conductă. Acest tip de traductor permite măsurarea debitelor fluidelor corozive, vâscoase, neomogene, fără a genera pierderi de presiune.
Figura 2.16
2.6 2.6. Traductoare de viteză Viteza este definită prin relația:
v = ∆S/∆t (2.17)
în care ∆S reprezintă deplasarea efectuată în intervalul de timp ∆t. Măsurarea vitezei liniare sau unghiulare se face prin metode directe, bazate pe definiție (menținând constant ∆S sau ∆t) sau prin metode indirecte (efect Doppler, legea inducției electromagnetice).
25
CAPITOLUL 2 Traductoare
În majoritatea cazurilor se măsoară viteze unghiulare, cele liniare fiind convertite prin sisteme mecanice în viteze unghiulare (turații), pe baza relației:
v = ω·R, (2.18)
în care ω este viteza unghiulară, iar R este raza de girație.
2.6.1 Tahogeneratorul Acest tip de traductor este cel mai des utilizat în aplicațiile practice, fiind o micromașină electrică de curent continuu sau de curent alternativ, la care tensiunea la borne în gol (sau la sarcini mici) este proporțională cu turația: U = k·n, (2.19) Turațiile maxime ce se pot măsura sunt de 2000 rot/min pentru tahogeneratoarele de curent continuu și 3000 rot/min pentru cele de curent alternativ. Pentru turații mai mari se pot folosi reductoare de turație mecanice.
Traductorul se montează la un capăt de ax al piesei de rotație, de la care consumă o putere de 1…50 W, ceea ce poate constitui o sursă de erori în cazul puterilor disponibile mici.
2.6.2 Traductorul fotoelectric Acest tip de traductor detectează variațiile unui flux luminos, dependente de viteza de rotație, folosind un dispozitiv modulator acționat de axul care se rotește. [Dumitrescu, Chiriac, 2000] După modul în care se obține variația fluxului luminos, dispozitivele modulatoare pot fi: - cu întreruperea fluxului luminos; - cu reflexia fluxului luminos. Structura sistemului de măsurare în cazul variantei cu întreruperea fluxului luminos este prezentată în figura 2.17.
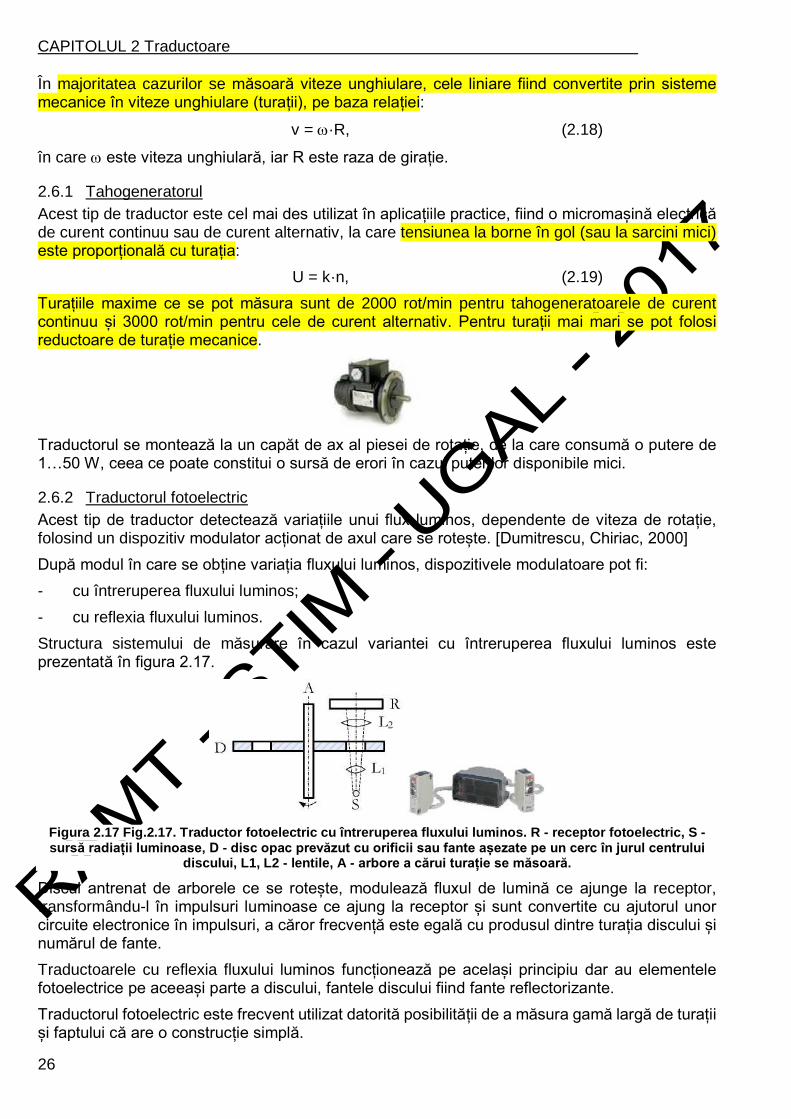
Figura 2.17 Fig.2.17. Traductor fotoelectric cu întreruperea fluxului luminos. R - receptor fotoelectric, S - sursă radiații luminoase, D - disc opac prevăzut cu orificii sau fante așezate pe un cerc în jurul centrului
discului, L1, L2 - lentile, A - arbore a cărui turație se măsoară.
Discul antrenat de arborele ce se rotește, modulează fluxul de lumină ce ajunge la receptor, transformându-l în impulsuri luminoase ce ajung la receptor și sunt convertite cu ajutorul unor circuite electronice în impulsuri, a căror frecvență este egală cu produsul dintre turația discului și numărul de fante. Traductoarele cu reflexia fluxului luminos funcționează pe același principiu dar au elementele fotoelectrice pe aceeași parte a discului, fantele discului fiind fante reflectorizante. Traductorul fotoelectric este frecvent utilizat datorită posibilității de a măsura gamă largă de turații și faptului că are o construcție simplă.
26
Bibliografie
Acest tip de traductor nu se poate folosi în medii cu praf sau cu lumină exterioară puternică.
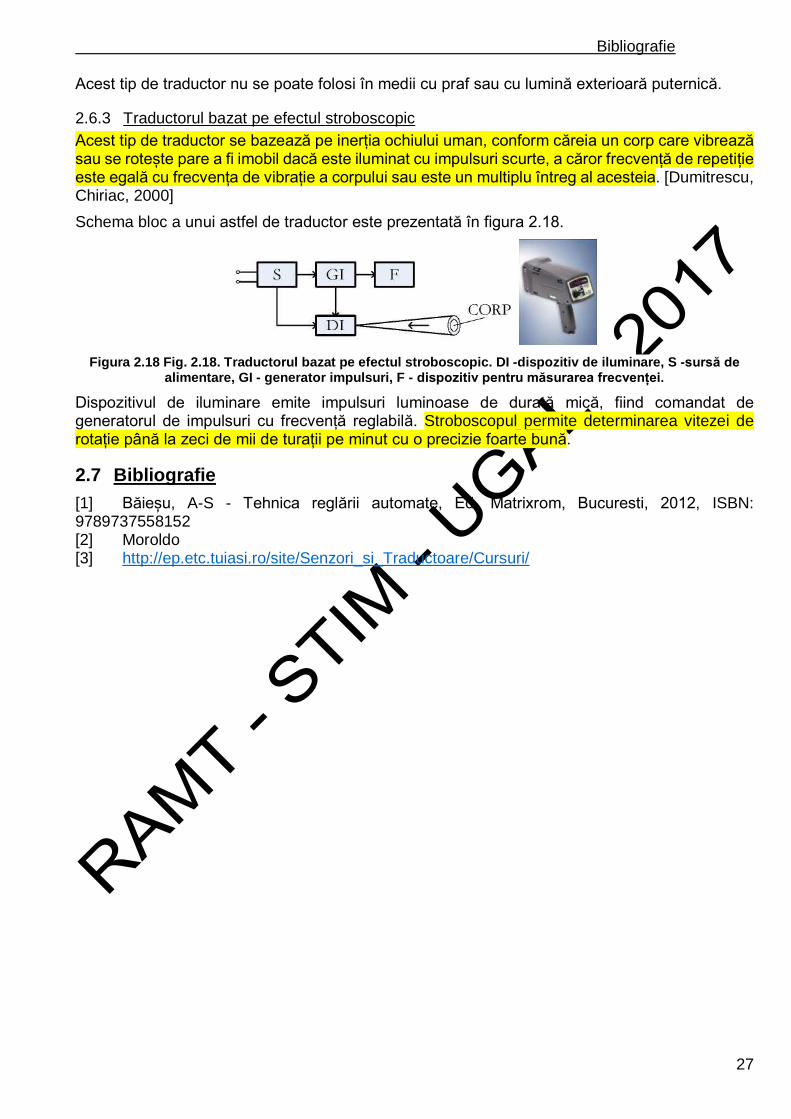
2.6.3 Traductorul bazat pe efectul stroboscopic Acest tip de traductor se bazează pe inerția ochiului uman, conform căreia un corp care vibrează sau se rotește pare a fi imobil dacă este iluminat cu impulsuri scurte, a căror frecvență de repetiție este egală cu frecvența de vibrație a corpului sau este un multiplu întreg al acesteia. [Dumitrescu, Chiriac, 2000] Schema bloc a unui astfel de traductor este prezentată în figura 2.18.
Figura 2.18 Fig. 2.18. Traductorul bazat pe efectul stroboscopic. DI -dispozitiv de iluminare, S -sursă de
alimentare, GI - generator impulsuri, F - dispozitiv pentru măsurarea frecvenței.
Dispozitivul de iluminare emite impulsuri luminoase de durată mică, fiind comandat de generatorul de impulsuri cu frecvență reglabilă. Stroboscopul permite determinarea vitezei de rotație până la zeci de mii de turații pe minut cu o precizie foarte bună.
2.7 Bibliografie [1] Băieșu, A-S - Tehnica reglării automate, Ed. Matrixrom, Bucuresti, 2012, ISBN: 9789737558152 [2] Moroldo [3] http://ep.etc.tuiasi.ro/site/Senzori_si_Traductoare/Cursuri/
27


















