135169598 Despre Biomecanica
184
Conf.univ.dr.Dora Gavrilescu Lect.univ.dr.Margareta Anton Lect.univ.drd.Olivia Timnea NOŢIUNI DE BIOMECANICĂ CU APLICAŢIE ÎN EDUCAŢIE FIZICĂ ŞI SPORT 2007 CUVÂNT ÎNAINTE 1
-
Upload
mariana-stan -
Category
Documents
-
view
94 -
download
12
Transcript of 135169598 Despre Biomecanica

Conf.univ.dr.Dora Gavrilescu
Lect.univ.dr.Margareta Anton Lect.univ.drd.Olivia Timnea
NOŢIUNI DE BIOMECANICĂ CU
APLICAŢIE ÎN EDUCAŢIE FIZICĂ ŞI
SPORT
2007
CUVÂNT ÎNAINTE
1

În ştiinţa sportului biomecanica ocupă o poziţie bine consolidată
din punct de vedere al prestigiului şi acest fapt se datoreşte în principal
progreselor pe care le-a realizat acest segment al ştiinţei sportului şi
faptului că aceste progrese se regăsesc la baza unor performanţe sportive
de excepţie, cum ar fi cele din atletism, înot etc.
Pe de altă parte trebuie să recunoaştem că publicaţiile din
domeniul biomecanicii sportive, mai puţin pe plan internaţional dar
dominant pe plan naţioal sunt în inferioritate faţă de cele din domeniul
biochimiei, psihologiei sportive (acestea din urmă s-ar putea să furnizeze
concluzii aplicative mai concrete pentru antrenamentul sportiv) şi această
realitate susţine obiectiv necesitatea aducerii la zi a informaţiilor privind
biomecanica sportivă. Ne permitem să apreciem că una din intenţiile
autorilor a fost şi aceasta iar din punctul nostru de vedere s-a reuşit cu
prisosinţă îndeplinirea acestui deziderat. Sub acest aspect lucrarea de faţă
poate fi considerată ca un manual ce lasă deschisă în viitor completări la
alte sporturi şi probe sportive (ex. Jocuri sportive) şi mai ales înotul,
sport în care progresele realizate în cercetarea biomecanică sunt practic
uriaşe şi pot în mare parte explica rezultatele sportive de excepţie din
înot.
Autorul principal al lucrării, conf. univ. dr. Dora Gavrilescu a
avut şansa de a se forma ca specialist la catedra de la ANEFS, condusă de
omul de ştiinţă, profesorul emerit general doctor Andrei Iliescu, la rândul
lui elev al profesorului Francisc Rainer, fondatorul biomecanicii sportive
din România; împreună cu şef de lucrări dr. Anton Margareta şi şef de
lucrări drd. Timnea Olivia autorul coordonator reuşeşte să elaboreze o
lucrare actuală şi modernă.
Lucrarea este structurată pe două părţi: PARTEA I-
BIOMECANICA GENERALĂ, care conţine şase capitole şi PARTEA A
2

II-A BIOMECANICA SPECIALĂ, care conţine două capitole ce tratează
despre analiza biomecanică a poziţiilor, analiza biomecanică a mişcărilor
şi a unor probe din atletism şi câteva jocuri sportive (volei, baschet,
handbal, fotbal).
Ne permitem să apreciem că ultimile două capitole (VII şi VIII)
sunt doar câteva exemple, care obligă însă pe autori să întregească
această lucrare de biomecanică sportivă cel puţin cu alte câteva jocuri; ne
gândim la hokey pe gheaţă, hokey pe iarbă, etc. Şi mai ales cu alte
sporturi, cum ar fi înotul, scrima, luptele, judo, halterele, gimnastica,
boxul, karatele etc. Oricum ce va apărea va fi binevenit şi va prefigura
lucrarea următoare. Ambele nu pot lipsi din biblioteca niciunui specialist
din sport. Este recomandarea unui om de sport.
Acad. Prof.dr.cons. Ioan Drăgan
UMF „ Carol Davila” Bucureşti
3

PREFAŢĂ
Motivaţia pentru a scrie această carte a fost generată de lipsa unei
lucrări recente în domeniu, care să fie accesibilă studenţilor, profesorilor
şi antrenorilor implicaţi în vastul domeniu al educaţiei fizice şi sportului.
Prin această lucrare autorii caută să ofere primele trepte în
înţelegerea biomecanicii.
Am structurat biomecanica educaţiei fizice şi sportului în
biomecanica generală, care studiază legile obiective generale ale mişcării
şi biomecanica specială dedicată particularităţilor mişcărilor în câteva
domenii de actvitate motrică. Studiul mişcărilor trebuie să descopere
greşelile care pot apărea în timpul formării şi consolidării deprinderilor
motrice de bază şi specifice unor ramuri sau probe sportive şi să indice
metodele înlăturării lor. In acest sens biomecanica este ştiinţa care poate
oferi indicaţii metodice şi practice valoroase pentru îmbunătăţirea
pregătirii fizice şi tehnice în vederea unei dezvoltări armonioase a
corpului şi a creşterii randamentului sportiv.
Autorii consideră că lucrarea se adresează în egală măsură atât
celor care vor şi trebuie să se iniţieze în domeniul biomecanicii (studenţi
în educaţie fizică, antrenori) cât şi celor care vor să-şi revadă noţiunile
fundamentale. Desigur că cititorii avizaţi nu vor găsi toate informaţiile
dorite ale unei asemenea probleme. Cercetarea biomecanică a apărut ca
urmare a orientării funcţionale a anatomiei datorită Prof. Dr. Francisc
RAINER şi a fost continuată de şcoala creată de acesta.
Ulterior datele furnizate de cercetările efectuate pe plan mondial,
ca şi rezultatele studiilor româneşti, au permis fundamentarea şi
dezvoltarea acestei ştiinţe implicate în vastul domeniu al educaţiei fizice
şi sportului. Astfel am selectat în această carte cele mai importante idei
4

şi le-am prelucrat, prin experienţa didactică câştigată în cei peste 15 ani
de activitate, alături de Prof. Dr. Andrei Iliescu, personalitate de prestigiu
în domeniul anatomiei şi biomecanicii căruia îi dedicăm lucrarea noastră.
Cu aceste cuvinte introductive recomandăm lucrarea de faţă
specialiştilor şi studenţilor din domeniul educaţiei fizice şi sportului şi ne
anunţăm încă de pe acum intenţia, obligaţia de a continua preocupările
noastre publicistice cu abordarea altor probe şi jocuri sportive şi cu
precădere a înotului, zonă în care progresele pe plan mondial în ceea ce
priveşte biomecanica se regăsesc în performanţele sportive de excepţie.
Dora Gavrilescu
5

PARTEA I. BIOMECANICĂ GENERALĂ
Biomecanica este ştiinţa care studiază aplicarea legilor mecanicii
la specificul fiinţelor vii. Mişcările corpurilor vii, indiferent care ar fie
ele, ale omului sau animalelor sunt supuse fără excepţie legilor mecanice
şi concomitent şi legilor biologice.
GOWAERTS, defineşte biomecanica ca “ştiinţa care se ocupă cu
studiul repercursiunilor forţelor mecanice asupra structurii funcţionale a
omului în ceea ce priveşte arhitectura oaselor, articulaţiilor şi a muşchilor
ca factori determinanţi ai mişcării”.
Biomecanica exerciţiilor fizice şi a sportului - se ocupă cu studiul
poziţiilor şi mişcărilor corpului omenesc. Ea studiază modul în care legile
mecanicii generale, se aplică la particularităţile biologice ale corpului
omenesc, cum iau naştere forţele musculare şi cum acţionează ele în
interdependenţă cu forţele externe.
Studiul biomecanicii cuprinde:
I. Biomecanica generală - care studiază legile generale ale mecanicii
aplicate la specificul organismelor vii.
II. Biomecanica specială - care studiază şi analizează statica şi
dinamica în diferitele domenii ale activităţii motrice.
Mecanica ramură a fizicii tratează informaţiile, problemele în mod
analitic. Ea foloseşte în acest scop limbajul matematic pe care trebuie să
îl cunoaştem.
6

CAPITOLUL I. NOŢIUNI SUMARE DE MATEMATICĂ
Analiza biomecanică a unui act sportiv necesită cunoaşterea unor
reguli matematice. Vom expune în cele ce urmează teoremele cele mai
folosite:
O dreapta (D) care întretaie două drepte paralele (A) şi (B)
determină patru unghiuri egale (fig.1)
Fig. 1
opuse prin vârfurile lor (1, 2, 3, 4), 1 şi 3 sunt unghiurile alterne
interne.
Două unghiuri ale căror laturi sunt perpendiculare două câte două
sunt egale (fig.2)
7

Fig.2
Exemplificăm această situaţie pe o radiografie a coloanei
vertebrale, care reprezintă gradul de rotaţie al unei scolioze (fig. 3).
Fig.3
Tragem o dreaptă care prelungeşte marginea superioară a vertebrei
superioare cea mai înclinată faţă de orizontală; apoi o altă dreaptă care
8

prelungeşte marginea inferioară a vertebrei inferioare deasemeni cu
gradul cel mai mare de înclinare faţă de orizontală. Unghiul 1 format de
aceste două drepte este adesea în afara clişeului radiologic, de aceea
este mai practic să tragem perpendicularele acestor două drepte. Astfel
unghiul 2 este egal cu unghiul 1 şi indică gradul de rotaţie al scolizei.
1.1. Elemente de trigonometrie
Trigonometria – este o ramură a matematicii care are ca obiect de
calcul elementele unui triunghi, stabilind o relaţie între unghiuri şi laturi.
Dacă consideram un cerc cu raza egală cu unitatea putem defini (fig. 4):
Fig. 4
AB = sin α (se citeşte sinus alpha)
OB = cos α (se citeşte cosinus alpha)
CD = tg α (se citeşte tangentă alpha ).
Dacă se proiectează un vector AB pe o dreaptă (D) (fig.5),
9

Fig. 5
α fiind unghiul vectorului AB şi al dreptei (D) se obţine segmental A’
B’. Se poate scrie A’ B’ = AB cos α. Dacă se proiectează un vector
AB pe două axe perpendiculare Ox şi Oy se defineşte:
Fig. 6
A’ B’ = AB cos α
A”B” = AB sin α
1.2. Elemente de mecanică aplicate la corpul omenesc
Mecanica se ocupă cu studiul legilor mişcării. Mişcarea mecanică
este forma cea mai simplă de mişcare a materiei; ea constă în
deplasarea unui corp faţă de altul, spre exemplu mişcarea unui vehicul,
mişcarea roţilor, mişcarea unor piese de maşini, etc.
10

Mecanica cuprinde trei capitole:
1. Statica – care studiază poziţiile şi condiţiile de echilibru ale forţelor
care acţionează asupra corpurilor;
2. Dinamica – care studiază cauza mişcării;
3. Cinematica – care studiază cum se desfaşoară mişcările.
Fiecare dintre aceste capitole cuprinde noţiuni pe care le vom dezvolta
în cele ce urmează, exemplificându-le cu aplicaţiile lor la mecanica
corpului omenesc.
11

CAPITOLUL II. STATICA
2.1. Masă, greutate, forţa gravitaţională
Noţiunea de masă a unui corp este adesea confundată din eroare
cu aceea de greutate. Tuturor corpurilor le corespunde noţiunea de
masă. Masa unui corp exprima proprietăţile sale de inerţie. Ea este
invariabilă faţă de locul unde se află corpul, la pol sau la ecuator, la
nivelul mării sau la înalţime sau pe lună.
Greutatea unui corp - este de natură diferită. Ea corespunde forţei
cu care un corp este atras de forţa de gravitaţie, într-un anumit loc.
Coeficientul de intensitate al gravitaţiei se notează cu g şi se măsoară
în metri pe secundă la pătrat (m.sec2). Astfel la ecuator
g = 9,78 m.sec²; la pol g = 9.83 m.sec²; pe lună g = 1.17 m.sec²
etc.
Forţa gravitaţională descrisă de Newton este cea mai
importantă forţa care acţionează asupra corpurilor în natură. Corpul
sau segmentele lui în mişcare trebuie să învingă greutatea corpului sau
a segmentelor respective, forţa gravitaţională care tinde să atragă
corpul la pământ; inerţia, presiunea atmosferică, rezistenţa mediului
(în care se face mişcarea), forţa de reacţie a suprafeţei de sprijin, forţa
de frecare, precum şi alte rezistenţe exterioare, cum ar fi greutăţile cu
care se încarcă corpul în mişcare. De fapt toate aceste forţe externe
enumerate mai sus şi care intervin în timpul mişcărilor, rezultă din
forţa gravitaţională. Forţa gravitaţională acţionează întotdeauna
vertical, de sus în jos atrăgând spre sol corpul şi segmentele lui, cu
tendinţa de a le imobiliza. Forţele interne (musculatura) ale
12

organismului acţionează în sens invers, de jos în sus, cu mare consum
energetic pentru învingerea forţei gravitaţionale prin mişcare.
2.2. Centrul de greutate
În statica exerciţiilor fizice la asigurarea poziţiilor corpului
concură mai multe forţe care se echilibrează reciproc; aceste forţe sunt
fie forţe exterioare: gravitaţia, reazemul, presiunea atmosferică, forţe
de frecare, etc fie forţe interioare: forţa musculară.
Dacă asupra unui corp acţionează mai multe forţe care au
acelaşi punct de aplicare (spre exemplu centrul de greutate sau alt
punct al corpului), ele se pot înlocui cu una singură denumită forţa
rezultantă; forţele înlocuite se numesc forţe componente.
Aflarea rezultantei este denumită compunerea forţelor, iar aflarea
componentelor în cazul în care cunoaştem numai rezultanta este
descompunerea forţelor.
Centrul general de greutate al corpului (C.G.G.) care se mai
numeşte şi centrul de masă sau de inerţie este cel în care se întretaie
rezultantele tuturor forţelor care acţionează asupra corpului.
Cunoaşterea locului centrului general de greutate este necesară în
studiul poziţiei corpului pentru aprecierea condiţiilor de echilibru.
Fiecare segment al corpului are un centru de greutate parţial (g) şi o
masă proprie (m) (tabelul 1).
13

Segmentul Poziţia centrului de
greutate a segmenelor
(g)
Masa
segmentului
Procente la
% din masa
corporală
Capul
Şeaua turcească
(figura.7)
4 kg
7,1 %
Trunchiul
Faţa anterioară L1
(figura.8, a şi b)
26 kg
4,3 %
Braţul La jumatatea sa
(figura. 9)
2 kg
3,4 %
Antebraţul In cele 4/9 superioare
(figura. 9)
1,5 kg
2,3 %
Mâna Epifiza inferioară a
metacarpianului al-II-
lea ( figura. 9 )
0,5 kg
0,8 %
Coapsa
In cele 4/9 superioare.
(figura 9)
7 kg
11,6 %
Gamba In cele 4/9 superioare.
(figura 10)
3 kg
5,3 %
Piciorul
Capul astragalian
(figura 10)
1kg
1,7 %
Tabelul 1. Masele segmentare ale unui subiect cu greutate de 60 kg.
Determinarea centrelor de greutate parţiale, segmentare g1, g 2)
permite determinarea centrului de greutate al întregului corp (G). (fig.7
– 10).
14

Fig.7. Capul
Fig.8a. Trunchiul
15

Fig.8b. Trunchiul
Fig.9. Membrul superior
16

Fig.10 Membrul inferior
2.3. Determinarea centrelor de greutate segmentară
Determinarea centrelor de greutate ale segmentelor este o
problemă foarte dificilă, datorită greutăţii în determinarea masei
acestor segmente pe viu. Există procedee complicate care permit
calcularea masei segmentelor corpului prin măsurarea volumului
diferitelor segmente sau prin echilibrarea lor în diferite poziţii. După
obţinerea prin calcule a centrelor de greutate segmentare (g1, g2), ele
se trasează şi se încorporează în masa segmentului, şi apoi se unesc
printr-o dreaptă (fig.11).
17

Fig.11- Centrul de greutate rezultat din cele două segmente-coapsă şi gambă
Suma celor două mase segmentare coapsa şi gamba (7 kg
respectiv 3 kg) permit divizarea segmentului de dreapta în tot atâtea
părţi. Se obţine astfel g3 care este situat în raport invers cu masele
respective. (3 / 10). Acest centru de greutate (g3) se poate apoi în
continuare asocia cu alte centre de greutate segmentare, şi din aproape
în aproape se poate ajunge până la ultima determinare care corespunde
centrului de greutate al întregului corp (G) sau mai sugestiv C.G.G.
(centrul general de greutate).
Dificultatea determinării greutăţii precise a segmentelor, a făcut ca
în practică să se folosească determinarea greutăţii relative a acestora.
Astfel se consideră ca centrul de greutate al membrelor este situat pe
axul longitudinal al acestora mai aproape de articulaţia proximală
datorită faptului ca distribuţia ţesuturilor este neuniformă, fiind mai
voluminoasă către articulaţia proximală a segmentului de membru.
18

Astfel locul centrului de greutate (g) este în medie situate la 0,44
din lungimea coapsei, 0,42 din lungimea gambei, 0,47 din lungimea
braţului si 0,42 din lungimea antebraţului (după E. REPCIUC).
Centrul de greutate al trunchiului - este situat pe linia care uneşte
mijlocul axelor transversale care trec prin articulaţiile scapulo-
humerale şi coxofemurale; la adulţii cu dezvoltare medie, centrul de
greutate al trunchiului se află la o distanţă de 0,44 faţă de linia
biscapulară; el coboară la persoanele cu torace astenic şi abdomen
voluminos.
Centrul de greutate al capului se află înapoia şeii turceşti.
2.4. Centrul general de greutate
Centrul general de greutate (C.G.G) al corpului omenesc în
poziţia stând, braţele libere în jos este situat în 56 – 57 % din cazuri în
spaţiul cuprins între vertebrele S I – S II ( la adult) şi a vertebrei T7 –
T 8 la noul născut. In plan sagital C.G.G este situat între sacru şi
pubis, în funcţie de gradul de înclinare a corpului înainte sau înapoi.
Planul sagital care trece prin C.G.G este situat mai la dreapta faţă de
planul mediu sagital al corpului, la marea majoritate a oamenilor,
întrucât jumatatea dreaptă a corpului are o masă mai mare cu 4 – 500
gr. decât cea stângă, datorită prezenţei ficatului, a dispoziţiei
asimetrice a organelor interne, precum şi a dezvoltării neuniforme a
masei aparatului locomotor (membrul superior şi inferior sunt mai
dezvoltate în jumătatea dreaptă a corpului).
C.G.G îşi schimbă poziţia şi în funcţie de mişcările respiratorii
(în înspiraţie coboară) şi de cantitatea de lichide şi alimente introduse
în stomac.
19

C.G.G a corpului omenesc se deplasează în aceeaşi direcţie cu
deplasările pe care le face omul, chiar numai mişcarea membrelor;
astfel încât C.G.G se deplasează în sus de câte ori ridicăm membrele
superioare sau inferioare şi coboară, atunci când ele revin la poziţia
iniţială. Astfel, la săritura în înălţime ridicarea membrelor superioare şi
a piciorului de atac prin ducerea lor înainte, deplasează C.G.G în sus şi
înainte, favorizând trecerea ştachetei. Datorită acestor variaţii multiple
ale C.G.G, poziţia precisă a acestuia nu se poate stabili; în schimb
poate fi determinată traiectoria C.G.G în diferite mişcări, oricât de
complexe precum şi locul său în diferite poziţii: stând, sezând în
sprijin, atârnat, etc.
Determinarea C.G.G este o operaţie dificilă însă foarte necesară
pentru studiul mecanicii corpului omenesc. Pentru aceasta, încă de
multă vreme savanţii s-au preocupat şi au imaginat numeroase metode
de determinare a poziţiei sau a traiectoriei C.G.G. Astfel, prima
metodă datează din anul 1679 şi aparţine lui Borelli, şi se bazează pe
principiul echilibrării corpului pe o platformă. De atunci au fost
descrise numeroase metode, dintre care subliniem: metoda prezentată
de E. Willems şi P. Swalus de la “Universitatea din Leuven” care au
prezentat la primul congres de biomecanică de la Zurich (1967) o
instalaţie electronică care permite citirea imediată fără calcul a
înălţimii C.G.G).
La noi în ţară primele determinări ale C.G.G au fost făcute de
către E. Repciuc de la Facultatea de Medicină din Bucureşti, care a
adaptat şi înbunătăţit o metodă pe care o folosim şi noi în prezent, la
facultăţile de educaţie fizică şi sport în procesul didactic şi de cercetare
ştiinţifică.
20

Pentru determinarea C.G.G prin metoda E. Repciuc, este
nevoie de un cântar pentru personae, o riglă antropometrică pentru
măsurarea înălţimii corpului, o targă de lemn specială cu lungimea de
2 m şi lăţimea de 0,5 m, prevăzută cu 2 suporţi metalici ascuţiţi la
capete, un bloc suport de lemn de aceeaşi înalţime cu platforma
cântarului, astfel încât targa sprijinită pe cântar şi pe blocul suport să
fie perfect orizontală, situaţie în care se citeşte greutatea parţială a
tărgii şi se notează cu T (fig.12).
Fig.12) a) Determinarea centrului de greutate prin metoda ponderilor parţiale;
b) Determinarea relaţiei dintre elementele care folosesc la aflarea C.G.G. (înalţimea
desupra solului).
Se culcă subiectul pe targă astfel încât să fie cu planetele tangente
pe reazemul tărgii, (fig.12) citim greutatea înregistrată de cântar care
reprezintă suma greutăţilor parţiale ale tărgii şi subiectului şi o notăm
cu P. Nu cunoaştem pe M, care este greutatea parţiala a corpului.
El poate fi determinat din relaţia P = M + T, iar M = P – T.
Ridicăm subiectul şi targa de pe cântar şi determinăm greutatea
persoanei situate în poziţie verticală pe cântar şi o notam cu G.
21

Cu aceste date putem calcula înalţimea C.G.G faţă de sol
folosind ecuaţia:
d = P – T /G, x L (2 m lungimea tărgii),
unde d este înalţimea C.G.G. a corpului.
Metoda se bazează pe faptul că greutatea G a corpului se
descompune când corpul este culcat orizontal pe targă, în două
componente F 1 şi F 2, care apasă asupra fiecăruia din capetele tărgii.
Intre G, L, F şi d există relaţii de proporţionalitate.
Deci : G / L = F1/ d, de unde deducem că d = F1 x L / G, dar F1
= M (greutatea parţială a corpului) şi prin înlocuire rezultă
d = M x L / G.
În această ultimă ecuaţie toate datele sunt cunoscute, deci se poate
calcula d, adică înalţimea C.G.G faţă de sol.
Determinarea C.G.G nu trebuie făcută numai în plan transversal
(adică înalţimea sa faţă de sol) ci şi în plan sagital (adică în poziţia sa
la stânga sau la dreapta planului) şi în plan frontal (adică poziţia sa
mai ventrală sau mai dorsală).
Prin metoda de determinare a poziţiei C.G.G descrisă mai sus,
aceasta poate fi aflată cu o oarecare aproximaţie; există erori de 2-3%
date de cântar (sensibilitatea limitată), targa (nu este confecţionată din
lemn perfect uniform), precum şi de mişcarea segmentelor corpului,
etc.
Acestor factori de eroare li se mai adaugă şi variaţiile multiple
ale înălţimii C.G.G produse de masa corporală, poziţia corpului şi a
segmentelor sale, momentul din zi când este determinat (înainte sau
după ingerarea de alimente), vârsta, sexul, etc. Astfel la copii C.G.G-
ul este situat mai sus decât la adulţi, la femei mai jos decât la bărbaţi
(fig.13).
22

Fig.13.Inălţimea C.G.G la bărbaţi şi femei în poziţia stând.
Aceasta poziţie a C.G.G. mult deasupra solului (în bazin în dreptul
vertebrei S II) produce la om o dificultate în timpul schimbărilor de
direcţie. Acest neajuns lipseşte la animale care au C.G.G aproape de sol.
2.5. Centrul volumului corpului
Centrul volumului corpului (C .V.) este situat la întretăierea
planurilor care împart corpul în două jumătăţi egale. El se foloseşte
pentru studiile biomecanice la înotători şi poate fi considerat ca C.G.G
al volumului apei dislocate prin scufundarea corpului omenesc în apă (şi
care are forma identică cu cea a corpului) C. V este situat ceva mai sus
decât C.G.G.
23

2.6. Centrul suprafeţei corpului
Centrul suprafeţei corpului (C.S) - se obţine prin proiectarea
corpului pe o suprafaţă perpendiculară pe direcţia de mişcare. In poziţia
stând C.S este situat puţin deasupra C.G.G-ului.
Determinarea C.S şi relaţia sa faţă de C.G.G se folosesc în
studiul mişcării corpului în aer (faza de zbor din sărituri, săritura cu
schiurile, etc) pentru menţinerea unei poziţii corespunzătoare a corpului
în aer şi pentru o aterizare bună.
2.7. Linia de gravitaţie
Linia de gravitaţie (vericala C.G.G) – este verticala imaginară
care trece prin C.G.G (fig.14).
Determinarea ei permite stabilirea factorilor care asigură
echilibrul în principal cel antero-posterior şi care defineşte noţiunile de
cifoză şi hiperlordoză.
Această linie pleacă din mijlocul segmentului care leagă cele
două tragusuri puţin înaintea condililor occipitali. Ea atinge curbura
cervicală anterior, ceea ce explică tendinţa de cădere a capului spre
înainte şi necesitatea de contracţie permanentă a extensorilor capului, pe
coloana cervicală pentru a-l menţine în poziţia corectă.
24

Fig. 14. Linia de gravitaţie (verticala C.G.G.)
Ea trece înaintea coloanei toracale intersectează vertebra L 2 şi
trece posterior de ultimele vertebre lombare. Apoi trece înaintea vertebrei
S 2 posterior faţă de articulaţia coxo–femurală, anterior faţă de genunchi
şi se proiectează pe sol la nivelul articulaţiilor medio–tarsiene.
Această linie de gravitaţie permite stabilirea principalelor
condiţii de echilibru în plan sagital şi frontal al corpului omenesc.
2.8. Poligonul de sprijin (susţinere)
Omul are un grad mare de adaptare la poziţia stând, ceea ce
permite eliberarea membrelor superioare pentru prehensiune şi lansări,
lăsând membrelor inferioare rolul de susţinere şi locomoţie.
25

Se poate afirma că poziţia stând reprezintă o adevarată
homeostazie biomecanică pe care activităţile sportive o vor putea
influenţa.
Poziţia stând este aproape o poziţie de odihnă. Ea nu antrenează
decât o slabă participare musculară şi din acest punct de vedere este
puţin obositoare. Studiul ei începe prin sprijinul pe sol şi permite să
definim poligonul de sprijin.
Practic, această suprafaţă de sprijin pe sol este cea care va
delimita marginea zonelor de sprijin (fig 15). Această suprfaţă este
înscrisă într-un triunghi isoscel.
Fig.15. Poligonul de sprijin în ortostatism
Pentru ca poziţia să fie stabilă trebuie ca linia de gravitaţie care trece
prin C.G.G să se proiecteze pe mediana triunghiului deasupra
articulaţiilor medio–tarsiene, deci puţin înintea articulaţiilor tibio-
tarsiene.
Unghiul de stabilitate este unghiul format de verticala C.G.G cu
linia care uneşte marginea bazei de sprijin (fig 16).
26

LEGENDĂ : alfa-unghiul de stabilitate ; P-verticala centrului de greutate ; G-centrul de
greutate.
Fig.16. Unghiul de stabilitate
Unghiul de stabilitate, deci « stabilitatea » (în condiţiile
echilibrului instabil) este direct proportional cu mărimea suprafeţei de
sprijin şi invers proporţională cu înalţimea C.G.G faţă de baza de sprijin.
Asfel în poziţia stând vertical, baza de sprijin este mică, iar înalţimea
C.G.G este mare, la poziţia şezând, baza de sprijin este mai mare, iar
înalţimea C.G.G este mai mică.
Teoretic, unghiul de stabilitate este cu atât mai mare cu cât C.G.G–ul
este situat mai jos, iar baza de sprijin este mai mare. Practic însă acest
unghi nu are valoare absolută deoarece proiecţia C.G.G se deplasează pe
diversele puncte ale suprafeţei de sprijin. Unghiul de stabilitate va fi
altul, pentru aceeaşi poziţie în raport cu marginea bazei de susţinere faţă
de care se calculează (anterioară sau posterioară).
27

2.9. Echilibrul corpurilor
Un corp este în echilibru atunci când punctul de sprijin sau de
susţinere şi centrul său de greutate se găsesc pe acceaşi verticală, când
forţele care acţionează asupra masei corpului se anulează.
Rezultanta tuturor forţelor care trec prin C.G.G trebuie să fie
egale cu zero. Deci nu trebuie să existe forţe care să provoace
accelerarea lineară a C.G.G-ul al corpului şi nici momente ale forţelor
care să determine rotaţia corpului în jurul C.G.G- ului.
Menţinerea poziţiilor nu este posibilă fără menţinerea echilibrului
omenesc, care rezultă din intrarea în acţiune a reflexelor posturale.
Din punct de vedere biomecanic şi conform legii echilibrului, starea
de echilibru se relizează atunci când proiecţia verticală a C.G.G al
corpului omenesc cade în interiorul bazei de susţinere. Stabilitatea
poziţiei este cu atât mai mare cu cât proiecţia centrului de greutate este
mai apropiată de centrul bazei de susţinere.
Orice poziţie a corpului este rezultatul echilibrării foţtelor care
acţionează asupra lui.
Pentru corpurile inerte, echilibrul este de trei feluri: stabil, instabil
şi indiferent. La vietuiţoare, deci şi la om nu există poziţii cu echilibru
indiferent, există numai echilibru stabil şi instabil.
2.9.1. Echilibrul stabil
Echilibrul stabil - există atunci când C.G.G al corpului se găseşte
sub punctul de sprijin. Exemplu: poziţia atârnat la bară fixă sau la inele
(fig.17).
28

Fig. 17. Echilibru stabil
Caracteristica principală a echilibrului stabil constă în faptul că la
orice deplasare a corpului din poziţia sa iniţială, iau naştere momente de
forţă care readuc corpul la poziţia de echilibru stabil. Cu alte cuvinte,
corpul pendulează şi revine la poziţia iniţială, greutatea corpului se
descompune în două componente: una îndreaptată, spre punctul de
sprijin, iar cealaltă într-o direcţie perpendiculară pe prima. Din (figura
17) rezultă că forţa componentă F2 se anulează prin rezistenţa punctului
de sprijin, iar componenta F1 deplasează corpul spre poziţia de echilibru,
în care ajunge după câteva oscilări (mişcarea încetează din cauza frecării
în punctul de sprijin şi al rezistenţei aerului).
2.9.2. Echilibrul instabil
Echilibrul instabil există ori de câte ori C.G.G se găseşte deasupra
suprafeţei de sprijin. Exemplele sunt foarte numeroase din activitatea de
educaţie fizică şi sport : poziţia stând, şezând în sprijin, etc (fig.18).
29

Fig.18. Echilibru nestabil
Caracteristica principală a acestui tip de echilibru constă în faptul că
la o modificare cât de mică a poziţiei, iau naştere momente de forţă care
provoacă devierea continuă a corpului şi căderea lui ; momentul acestor
forţe creşte proporţional cu creşterea devierii. Deci, în toate cazurile de
echilibru nestabil, momentele forţelor care iau naştere în caz de
dezechilibrare se opun reîntoarcerii corpului în poziţia iniţială, spre
deosebire de poziţiile de echilibru stabil, când momentele forţelor care
iau naştere în caz de deviere, tind să readucă corpul în poziţia iniţială.
La cea mai mică deviere a corpului faţă de poziţia de echilibru,
greutatea lui nu mai trece prin punctul de sprijin şi se descompune în
două componente :
F2 pe direcţia punctului de sprijin şi F1 perpendiculară pe prima
(fig.18). Componenta F2 este anulată de rezistenţa punctului de sprijin,
iar F1 produce devierea corpului faţă de poziţia iniţială.
La poziţia de echilibru nestabil există numeroase variante, care
imprimă un grad mai mare sau mai mic de stabilitate, în condiţiile în care
echilibrul general este nestabil. Astfel poziţia stând verticală are un grad
de stabilitate mai mic decât poziţia şezând, deci ambele poziţii sunt în
echilibru nestabil.
30

Gradul de stabilitate mai mare sau mai mic, în condiţiile echilibrului
nestabil este determinat de unghiul de stabilitate.
2.9.3. Echilibrul indiferent
Echilibrul indiferent prezent numai la corpurile inerte se
caracterizează prin faptul că sprijinul coincide cu C.G.G sau se găseşte
pe verticală acestuia. In cazul echilibrului indiferent orice poziţie am
imprima corpului, el rămâne în echilibru. De exemplu un disc străbătut
de un ax central poate fi învârtit şi rămâne constant în echilibru sau o
sferă pe un plan orizontal se află permanent în echilibru, indiferent de
felul cum ia contact cu planul.
2.10. Pârghiile şi aplicaţiile lor la corpul omenesc
Pârghia este cel mai simplu dispozitiv mecanic cu ajutorul căruia se
pot transmite mişcări în mod convenabil în ceea ce priveşte consumul de
energie.
Oasele corpului formează pârghii, care sunt mobilizate de muşchi
după toate regulile mecanice ale parghiilor.
Există totuşi unele particularităţi ale pârghiilor din corpul omenesc
care rezultă din specificul biologic al structurii şi funcţiilor organismului
omenesc.
La o pârghie deosebim următoarele elemente :
1. Punctul de sprijin (O) în jurul căruia se roteşte;
2. Punctul de rezistenţă (R) care trebuie învinsă;
3. Forţa activă (F) cu care se învinge forţa de rezistenţă;
31

4. Braţul rezistenţei (OR) de la punctul de sprijin până la punctul de
aplicare a rezistenţei.
5. Braţul forţei (OF) de la punctul de sprijin până la punctul de
aplicare a forţei active.
După felul cum se grupează aceste elemente, pârghiile pot fi :
a). pârghii de forţă, cu ajutorul cărora economisim forţa, adică
învingem o forţă de rezistenţă mai mare întrebuinţând o forţă activă mai
mică;
b). pârghii de deplasare, cu ajutorul cărora economisim deplasarea
însă cu pierdere de forţă;
Din punct de vedere al fizicii avem trei grade de pârghii :
1. Pârghii de gradul I – cu punct de sprijin situat între forţa de
rezistenţă şi forţa activă;
2. Pârghii de gradul II – cu punctul de sprijin situat la unul dintre
capete şi forţa activă la celalalt capăt ;
3. Pârghii de gradul III – cu punctul de sprijin situat la unul
dintre capete şi forţa de rezistenţă la celalalt capat.
32

Se recunosc astfel la pârghiile mecanice trei puncte de aplicare a
forţelor :
- punctul de sprijin (O),
- pun ctul rezistentei adica (R),
- punctul de aplicare al fortei active (F).
Pârghiile - au deci două puncte în care se aplică forţele statice (O) şi
(R) şi un punct în care se aplică forţa activă (F).
In pârghia de gradul I forţele activează în acelaşi sens în timp ce
la pârghiile de gradul II şi III, forţele lucrează în sens opus.
Pârghiile de gradul I si II sunt pârghiile de forţă, în timp ce
pârghiile de gradul III sunt pârghii de deplasare. Aplicarea forţelor pe
pârghii crează momente de rotaţie faţă de punctul de sprijin. Astfel o
pârghie va fi în echilibru când momentul de rotaţie al forţei active este
egal şi de sens opus cu momentul de rotaţie al forţei de rezistenţă faţă
de acelaşi punct.
Este cunoscut că la pârghiile de gradul III se pierde o parte
din forţă, însă această pierdere este compensată de o alungire a
deplasării. Legea de aur a mecanicii se poate deci enunţa astfel : «ce
se pierde din forţă se câştigă în deplasare». Aceste genuri de pârghii
sunt în mecanică, dar mai ales în corpul omenesc şi se mai numesc şi
pârghii de viteză întrucât favorizează deplasările largi şi în viteză.
Exemple de pârghii în corpul omenesc:
A). Pârghiile de gradul I. Sprijinul capului pe articulaţia atlanto –
occipitală; forţele active şi de rezistenţă sunt dispuse înainte şi înapoia
33

sprijinului. In acest caz braţul forţei reprezentat prin distanţa de la
inserţia muşchilor cefei până la articulaţia atlanto – occipitală, este mai
mic decât braţul rezistenţei. De aceea musculatura cefei este mult mai
dezvoltată decât musculatura ventrală a gâtului.
Pentru echilibrarea acestei pârghii, muşchii cefei mânuiesc un
braţ de pârghie mai mic. Tot pârghie de gradul I este şi în staţiunea
bipedă la nivelul articulaţiei coxo-femurale cu sprijinul în articulaţie şi
aplicarea forţelor active ventral şi dorsal.
B). Pârghiile de gradul II : sunt contestate că ar exista în corpul
omenesc. După unii, o astfel de pârghie ar exista în articulaţia
talocrurală, în poziţia stând pe vârfuri în care sprijinul ar fi pe vârful
degetelor şi capetele metatarsienelor.
Rezistenţa este reprezentată de greutatea corpului care apasă pe
tibie şi talus, iar forţa activă muşchiul, triceps sural care trage de
calcaneu în sus.
C). Pârghiile de gradul III sunt cele mai numeroase în corpul
uman.
Exemplu :
- flexia coapsei pe bazin ;
- antebraţul în flexie pe braţ;
- braţul în anteducţie în articulaţia umărului;
- gamba în flexie pe coapsă; etc.
Datorită acestui fapt, omul poate executa mişcări ample de viteză şi
de precizie. Este adevărat că aceste pârghii lucrează cu pierdere de
forţă, însă conform legii de aur a mecanicii : «Ce se pierde din forţă se
câştigă în deplasare».
O particularitate deosebită a pârghiilor de gradul III, o constituie
faptul că pe lângă pârghii de gradul III cu un singur punct de aplicare a
34

forţei, (exemplu deltoidul pe humerus în mişcarea de abducţie a
braţului, există şi pârghii de gradul III cu două puncte de aplicare a
forţei. Exemplu : flexia gambei pe coapsă ce se face atât cu ischio–
gambierii care mânuiesc un braţ mic de forţă, cât şi cu tricepsul sural
care mânuieşte un braţ lung de forţă). Există şi pârghii de gradul III cu
mai multe puncte de aplicare a forţei active, cum este la mişcarea de
flexie a antebraţului unde acţionează F1 – bicepsul, cu braţ scurt, F2–
rotundul pronator, cu un braţ mai lung, F3 – brahio-radialul, F4-
flexorul carpului, F5- flexorii degetelor, cu braţul din ce în ce mai lung.
(fig.19). Ce avantaj mecanic conferă această dispoziţie anatomică ?
Fig. 19. Flexorii cotului, carpului şi degetelor
Fiecare dintre cele cinci forţe active au momente de rotaţie
diferite, care le dau posibilitatea să intre în acţiunea de flexie succesivă
şi să confere acestei mişcări de flexie pe lângă rapiditate şi precizie
foarte necesară mâinii omului.
O altă caracteristică a pârghiilor biologice constă în faptul că pe
parcursul mişcărilor, genul pârghiilor se poate schimba.
Astfel, în poziţia verticală, la nivelul articulaţiei coxo – femurale se
stabileşte o pârghie de gradul I. Dacă din această poziţie efectuam o
flexie a coapsei pe bazin, coapsa devine o pârghie de gradul III cu
punct de sprijin în articulaţia coxo – femurală.
35

Faptul că sensul pârghiilor se schimbă pe parcursul mişcărilor
sau din trecerea de la o poziţie la o mişcare, conferă omului
posibilitatea efectuării unor mişcări suple, în viteză, iar la nevoie să
dezvolte şi forţă.
În activitatea de educaţie fizică şi sport cunoaşterea pârghiilor şi
a legilor lor, dă posibilitatea intervenirii în mod ştiinţific la dezvoltarea
calităţilor motrice.
36

CAPITOLUL III. DINAMICA
Dinamica – ca ramură a mecanicii are rolul de a explica modul
cum se produce variaţia mişcărilor corpurilor şi de a stabili raporturile
dintre corpurile aflate în mişcare.
3.1. Legile mişcării descrise de Newton (I, II, III)
Bazele studiilor moderne ale mişcării au fost puse de Isaac Newton
încă din secolul al – XVII-lea când a formulat cele trei legi
fundamentale ale mecanicii.
Legea I – orice corp îşi menţine starea de repaus sau de mişcare,
dacă nu este obligat de forţe aplicate asupra lui să şi-o modifice.
Această lege este descrisă şi ca lege a inerţiei deoarece, ea explică
necesitatea unei forţe care să acţioneze asupra corpurilor pentru a le
schimba starea de repaus sau de mişcare şi implicit să învingă
rezistenţa care se opune acestei schimbări.
Cauza care determină menţinerea stării de repaus sau de
mişcare se numeşte inerţie.
În mecanică aceasta proprietate a corpurilor, această opoziţie de
a-şi schimba starea în care se află (repaus sau mişcare), este cunoscută
sub denumirea de inerţie. Cantitatea de substrat din care este alcătuit
corpul, este masa corporală, ea fiind o măsură a inerţiei sale. De
exemplu dacă într-un antrenament de forţă, se creşte încărcătura
adăugând un nou disc, masa care va trebui ridicată, măsurată în kg, va
fi mai mare. Rezistenţa încărcăturii la punerea ei în mişcare, va
necesita un efort mai mare decât (înainte de îngreunare) pentru că şi
inerţia sa va fi mai mare.
37

Forţa de inerţie se manifestă ca o rezistenţă, atunci când un
corp este pus în mişcare, (o greutate sau o halteră opun rezistenţă atunci
când sunt ridicate) sau o presiune atunci când un corp este oprit din
mişcare (presiunea pe sol la aterizarea din săritură).
Inerţia poate fi de repaus sau de mişcare. Corpurile în
mişcare au tendinţa de a–şi continua mişcarea, prin acţiunea inerţiei de
mişcare. De exemplu, alergătorii aflaţi în viteză au tendinţa să îşi
continue alergarea şi pentru ai opri este nevoie de o forţă de frânare.
Corpurile aflate în repaus tind să rămâna în repaus.
Legea a – II- a : (sau a accelerării), se enunţă astfel: mărimea
forţei (F) care acţionează asupra unui corp îi imprimă acestuia o
anumită acceleraţie, ea este egală cu produsul dintre masa corpului (m)
şi mărimea acceleraţiei (a) :
F = m x a
Forţa este cauza care produce acceleraţia. Forţa se măsoară cu
ajutorul dinamometrului, iar acceleraţia se calculează cu ajutorul
spaţiului străbătut de un corp într-un anumit interval de timp; o forţă
mai mare produce o acceleraţie sporită şi invers.
Legea a III-a, numită şi a reacţiei reciproce se enunţă astfel:
acţiunile reciproce a două corpuri sunt totdeauna egale ca mărime şi de
sens contrar.
Toate corpurile din natură acţionează unele asupra altora, iar
forţele sunt de sens contrar. Sub acţiunea acestor forţe se dezvoltă
acceleraţii şi viteze invers proporţionale cu masele corpurilor. De
exemplu în mers, atunci când planta ia contact cu solul exercitand o
presiune asupra acestuia, solul răspunde cu o forţă egală dar de sens
opus.
38

Prin contracţia, musculara (în mers) omul poate acţiona asupra
solului, cu o forţă mai mare decât greutatea lui, surplusul de forţă
imprimându-i o mişcare în sus (fig.20).
Fig. 20. Amortizarea in mers
Când omul stă pe sol fără a a efectua nici o mişcare, forţele
care acţionează asupra lui se echilibrează reciproc.
Vom mai da exemplul unui înotător, în momentul startului
(fig.21) care exercită să spunem, o forţă de 1000 N (Newtonul unitate
de măsură a forţei) orientată în jos şi asupra bloc-startului; bloc-startul
exercită o forţă tot de 1000 N, dar orientata în sus (fig.21) şi asupra
înotătorului.
Fig.21a. Forţa exercitată de înotător asupra bloc-startului “acţiunea”
39

Fig. 21 b. Forţa exercitată de bloc-start asupra înotătorului « reacţia »
Se numesc aceste forţe arbitrar, una de «acţiune» şi alta de
«reacţie». Una dintre cele mai comune cauze de eroare în aplicarea
«Legii a –III –a» a lui Newton, este lipsa recunoaşterii că «acţiunea» şi
«reacţia» nu acţionează împreună asupra aceluiaşi corp. Subliniem în
acest sens că «acţiunea» este o forţă ce se exercită asupra unui corp, iar
«reactia» este forţa opusă, ce acţioneaza asupra altui corp.
3.2. Forţa
O energie care modifică sau tinde să modifice starea de mişcare a
unui corp se numeşte forţă. Dacă corpul este în repaus, o forţă
exercitată de un alt corp asupra sa, îl va pune în mişcare, sau va tinde
să-l pună în mişcare. Dacă un corp este în mişcare rectilinie, forţa
exercitată asupra sa de alt corp va modifica sau va tinde să modifice
viteza cu care acesta se deplasează.
Forţele sunt vectori cantitativi care au o dimensiune şi o
direcţie, şi se pot suma într-o rezultantă folosind paralelogramul
forţelor (vectorilor) (fig. 22).
40

Fig.22. Descompunerea forţei F în două componente P şi Q şi compunerera
paralelogramului forţei F.
Forţa se măsoară în Newtoni (N). Astfel 1 Newton este acea
forţă care produce într-un corp cu masa de 1 kg. o acceleraţie de
1m/sec².
1 N = 1 kg x 1m/ sec²
Adesea când un număr de forţe acţionează asupra corpului,
trebuie să găsim o singură forţă numită rezultantă care va avea
acelaşi efect asupra corpului ca cel al forţelor combinate pe care le
înlocuieşte. Acest proces se numeşte compunerea forţelor. Situaţia cea
mai comună pe care o întâlnim în mişcarea corpului omenesc este
aceea de a rezolva o singură forţă prin două componente.
3.3. Momentul forţei
Termenul de moment este adesea folosit în atletism pentru a
exprima dominanta unei faze a mişcării, precum şi în faze ale jocurilor
de echipă ca alternativă al termenului de viteză.
In mecanică, moment are un înţeles limitat şi precis. El este
produsul dintre masa corpului şi viteza sa, şi astfel este vector
41

cantitativ. Momentul reprezintă cantitatea de mişcare pe care o are un
corp.
Algebric se exprimă astfel :
M= m x v
În care : M = momentul; m = masa şi v = viteza.
Astfel un schior coborâtor cu o masă corporală de 70 kg, şi o viteză
de 30 m/sec, are momentul de 2.100 kg. m / sec.
Momentul are mare importanţă în situaţiile de impact. Rezultatul
impactului este în funcţie de momentul pe care îl are fiecare din cele
două corpuri implicate.
Noţiunea de moment din mecanică, îsi găseşte aplicaţia şi la
corpul omenesc când vorbim despre momentul muşchiului. In diferitele
lui momente muşchiul poate fi mai mult sau mai puţin perpendicular pe
pârghia pe care acţionează. Faza de acţiune în care incidenţa
perpendiculară îi permite un maximum de acţiune, se numeşte
momentul muşchiului, (DEBRIERRE).
3.4. Lucrul mecanic
Ori de câte ori, o forţă acţionează asupra unui corp oarecare,
produce deplasarea acestuia, acea forţă efectuează un lucru mecanic.
Noţiunea de forţă nu trebuie confundantă cu lucrul mecanic, întrucât
există numeroase forţe care acţionând asupra corpurilor nu produc
deplasarea acestora. Asigurarea diferitelor poziţii ale corpului, sau ale
segmentelor sale necesită un important consum de forţă musculară fără
42

însă a produce lucru mecanic. De asemenea asigurarea tuturor
mişcărilor corpului sau ale segmentelor sale, se face tot cu consum
mare de forţă musculară pentru a produce lucrul mecanic, întrucat forţa
consumată produce deplasarea corpului.
Deci, lucrul mecanic rezultă din învingerea unei rezistenţe de
către o forţă.
Lucrul mecanic este proporţional cu mărimea forţei care–l
efectuează şi lungimea drumului pe care este deplasat acel corp.
Astfel, dacă un halterofil ridică o halteră de 20 kg f, efectuează un lucru
mecanic de două ori mai mare decât dacă ar ridica o halteră de 10 kg f
şi invers.
Totodată dacă acelaşi sportiv ridică o halteră la 2 m înalţime,
efectuează un lucru mecanic de două ori mai mare decât dacă ar ridica-
o la numai 1 m.
Lucrul mecanic efectuat este egal cu produsul dintre forţă şi
deplasare.
Lm = F x L,
unde F = forţa care acţionează,
iar L = lungimea deplasării
În corpul omenesc sunt numeroase exemple de acest fel, care
demonstreză ce este lucrul mecanic şi care este deosebirea dintre forţa
musculară în sine şi lucrul mecanic pe care această forţă îl depune
pentru efectuarea diferitelor mişcări.
Lucrul mecanic într-o situaţie dată poate fi pozitiv, zero sau
negativ. Astfel, un atlet (figura 23 a) care face exerciţii de forţă cu o
halteră, exercită constant o forţa de 1000 N, pentru a o ridica până la
0,3 m (figura 23,b). Lucrul mecanic pe care-l efectuează este
(1000 N x 0,3m) =300 Nm sau 300 joules (1 joule (J) = 1Nm).
43

Fig. 23 a. Lucrul mecanic este pozitiv la ridicarea halterei
Fig.23 b. Lucrul mecanic efectuat este zero când haltera este menţinută ridicată
Acest lucru mecanic este pozitiv, pentru că direcţia în care se
mişcă corpul este aceeaşi cu cea a forţei care acţionează pentru a coborî
haltera.
44

De aici pentru a cobora haltera (fig.23, c) forţa este tot de 1000
N, fiind vorba de aceeaşi distanţă (0,3 m), iar lucrul mecanic va fi tot de
300 J.
Fig.23 c. Lucrul mecanic este negativ la coborârea halterei
Pentru că direcţia de mişcare a corpului este opusă celei de
aplicare a forţei, lucrul mecanic este considerat negativ. Este important să
spunem că în situaţia dată, lucrul mecanic este pozitiv când muşchii care
dezvoltă această forţă (în acest caz extensorii cotului şi flexorii umărului)
se scurtează şi lucrul este negativ când ei se alungesc. Astfel, din punct
de vedere muscular, lucrul mecanic pozitiv şi negativ poate fi indentificat
cu contracţia concentrică respectiv excentrică.
Execuţia acestui efort de forţă cu haltera s-a făcut în poziţia culcat
pe o banchetă (vezi fig. 23), situaţii în care ridicarea halterei la verticală
se face de către două forţe verticale; o forţă de ridicare a halterei
exercitată de sportiv şi altă forţă de coborâre exercitată de forţa
gravitaţională. Lucrul mecanic total efectuat cu haltera este egal cu
suma lucrului efectuat de aceste două forţe, mai precis de rezultanta lor.
Dacă haltera (fig.23) cântăreşte 800 N, lucrul mecanic total
efectuat pentru ridicarea ei la 0,3 m este egal cu suma lucrului mecanic
45

efectuat de sportiv şi forţa gravitaţională sau lucrul mecanic exprimat
prin rezultanta forţelor.
(1000 N x 0,3 m) – (800 N x 0,3 m) = 60 J
(1000 N – 800 N) x 0,3 m = 60 J.
Dacă direcţia forţei face un unghi cu direcţia deplasării aşa cum
se întâmplă cu majoritatea muşchilor corpului, care se inseră oblic
(fig.24) pe pârghiile osoase, lucrul mecanic va fi diferit şi se calculează
după formula :
L m = F x L x cosinus (alfa)
în care alfa este unghiul dintre direcţia forţei şi direcţia deplasării.
Este cunoscut faptul că pentru deplasarea unei greutăţi este necesară o
anumită forţă; când încercăm să deplasăm aceeaşi greutate însă cu o
forţă care se aplică oblic pe direcţia mişcării cu care face un unghi (alfa),
este necesară o forţă mai mare. Numai o parte din forţa F serveşte la
efectuarea deplasării, deci la efectuarea lucrului mecanic.
Fig. 24.Aplicarea unei forţe oblic pe pârghia osoasă
46

Ce se întâmplă cu forţa F2, adică acea parte a forţei care este
opusă direcţiei de tracţiune a muşchiului? Ea se consumă pentru a presa
pârghia osoasă mobilă pe axul articulaţiei, adică pe axul mişcării.
In biomecanică această parte a forţei care nu se foloseşte pentru
mişcare (adică pentru lucrul mecanic) se numeşte componentă articulară
de presiune. În orice mişcare a corpului mers, alergare, sărituri, jocuri
sportive, etc. musculatura corpului depune atât efort muscular dinamic
(acela care produce deplasarea şi deci lucrul mecanic), cât şi efort static
(acel care nu produce lucrul mecanic şi se cheltuieşte pentru învingerea
forţei gravitaţiei, adică a greutăţii corpului). Dacă forţa de greutate a
corpului G este perpendiculară (fig.25) pe direcţia deplasării corpului
cum este cazul în deplasările pe un plan orizontal, aplicând formula
lucrului mecanic, când forţa face un unghi drept cu direcţia deplasării
folosim formula:
L m = G x L x cosinus alfa/2
Fig.25. Aplicarea unei forţe perpendicular pe pârghia osoasă
47

Din această relaţie rezultă că pentru învingerea greutăţii corpului
nu se produce lucru mecanic. Totuşi musculatura corpului depune un
efort pentru a merge, a alerga, etc. Care este explicaţia?
Datorită forţei de gravitaţie se produce o forţă de frecare care
trebuie învinsă. Forţa la frecare F este proporţională cu greutatea
corpului şi coeficientul de frecare.
F = G x K
Coeficientul de frecare (K), este variabil după caracteristicile de
alunecare a suprafeţelor aflate în contact.
De aceea, în toate deplasările pe un plan orizontal valoarea
lucrului mecanic depus de musculatura corpului va fi egală cu lucrul
mecanic depus pentru activitatea dinamică, la care se adaugă lucrul
mecanic pentru învingerea forţei de frecare.
Unitatea de măsură a lucrului mecanic este kilogrammetrul
(kgm) care reprezintă lucrul mecanic efectuat de o forţă de 1 kg pe o
distanţă de deplasare de 1 m în direcţia forţei.
3.5. Puterea
Puterea este lucrul mecanic efectuat în unitatea de timp/secundă.
Dacă notăm lucrul mecanic cu L, puterea cu P şi timpul cu t
avem relaţia:
P = L/t
Din această relaţie se poate afla orice componentă dacă le
cunoaştem pe celelalte două. Astfel:
L = P x t şi t = L/P
De exemplu un alergător de viteză care parcurge 100 m în
48

11 sec. are o putere mai mare decât cel care a parcurs aceeaşi distanţă în
12 sau 13 sec. Un halterofil care ridică o halteră cu greutatea de 600 J în
1,5 sec, depune o putere de : (600j/1,5 sec) = 400 j /sec sau 400Watt (1
W) =1 j/sec. Unitatea de putere se numeşte Watt, iar unitatea de 1000 de
ori mai mare se numeşte KILO-WATT. În practică se foloseşte şi altă
unitate, cal putere (C.P)
1 C.P = 75 kgm/sec.
3.6. Energia
Energia este capacitatea de a efectua lucrul mecanic. Ea apare în
univers sub diferite forme: electrică, chimică, nucleară, mecanică. In
contextual energiei mecanice (singura formă de energie de care ne vom
ocupa aici) când o forţă (F), acţionează asupra unui corp, astfel înacât
acesta se mişcă pe o distanţă (X), lucrul efectuat de corp sau energia pe
care o cheltuieşte (W) este:
W = F x X
Lucrul mecanic şi energia folosesc acelaşi tip de unităţi de măsură
din S.I (sistemul internaţional de unităţi) pentru forţa exprimarea se face
în newtoni distanţa în metri şi lucrul mecanic sau energia în jouli.
Energia mecanică este de două feluri: energie cinetică şi
potenţială.
3.6.1. Energia cinetică
Energia cinetică: Energia pe care o posedă un corp în mişcare se
numeşte energie cinetică (Ec) şi se exprimă prin ecuaţia :
Ec = 1/2 m V ²
49

în care m este masa corpului şi V = viteza de deplasare a acestuia
Astfel un fundaş de 100 kg care aleargă cu 9 m/sec are o
energie cinetică de :
(½ x 100 x 9²) 4050 kg x m/sec² sau 4050 jouli
[1J = 1 kg x (m/sec² )]
Este o energie cinetică mare şi va fi greu de stăpânit fundaşul în
acţiune de cei ce-i vor sta în cale.
3.6.2. Energia potenţială
Energia potenţială. Când un corp este situat la înălţime deasupra
solului, el este dotat cu o energie potenţială (Ep) sau de poziţie. Inălţimea
relativă la care se află corpul prin coborâre la nivelul solului poate
produce lucrul mecanic.
Energia potenţială a unui corp se poate exprima prin ecuaţia:
Ep = W x h,
în care W este greutatea corpului şi h este înălţimea corpului faţă de
suprafaţa solului. Astfel când săritura de la trambulină cu o greutate de
600 N parcurge prin aer 3 m până la nivelul apei, va avea o energie
potenţială de (600 N x 3 m) = 1800 j.
Exemple sugestive de energii potenţiale pot fi cele din viaţa de zi
cu zi, ciocanul pneumatic, pistonul unei maşini cu aburi sau destinderea
arcului ceasornicului, care pun în mişcare întregul mecanism, prin
energia potenţială acumulată.
50

CAPITOLUL IV. CINEMATICA
Este aceea teorie a mecanicii care are ca obiect descrierea
mişcărilor sistemelor materiale (corpul omenesc, maşini etc.) fără a căuta
cauzele care le produc.
Cinetica este în egală măsură o teorie, parţială a mecanicii. Ea face
apel la noţiunile de lungime, timp şi masă.
4.1. Mişcarea
Studiul unei mişcări presupune stabilirea convenţională a unor
elemente de bază fără de care studiul nu este posibil. Aceste elemente
sunt: reperul faţă de care se realizează mişcarea, direcţia de mişcare şi
viteza cu care se execută mişcarea şi timpul în care se realizează.
Reperul. Orice mişcare observată în spaţiu este relativă, în sensul
că ea este considerată convenţional ca atare faţă de un anumit punct
considerat în mod convenţional fix. Un săritor cu prăjina de exemplu se
deplasează în timpul elanului faţă de pistă, în timpul pendulării faţă de
prăjină, în timpul săriturii propriu-zise faţă de ştachetă şi în timpul
căderii faţă de groapa de nisip. Pe parcursul acestei mişcări complexe, în
plus, fiecare segment al corpului se deplasează într-un anumit fel, faţă de
alt segment al corpului.
Direcţia de mişcare. Orice mişcare se realizează pe o anumită
traiectorie în spaţiu, deci faţă de trei dimensiuni. DESCARTES încă în
anul 1637 a propus un sistem de coordonate rectangulare, în care se
consideră că direcţia mişcării se stabileşte faţă de originea celor trei
51

coordonate: pe orizontală-înainte şi înapoi; pe verticală-în sus şi în jos; şi
lateral–la dreapta şi la stânga.
4.1.1. Mişcarea lineară, curbilinie, translaţie, rotaţie şi generală
Direcţia de mişcare a unui punct izolat poate fi rectilinie când
punctul se deplasează pe o traiectorie dreaptă sau curbilinie când punctul
se deplasează pe o traiectorie curbă.
Mişcările corpului omenesc sau ale segmentelor lui nu sunt ale unor
puncte izolate ci ale unor corpuri materiale cu o anumită formă
geometrică, alcătuite dintr-un număr infinit de puncte. Aceasta face ca
mişcările acestor corpuri sa fie de translaţie (sau lineare) de rotaţie (sau
unghiulare). Când toate punctele se deplasează pe traiectorii paralele,
mişcarea este de translaţie (fie ea rectilinie sau curbilinie), (fig.26 ,27).
Fig. 26. Alunecarea liniară şi neliniară a schiorului în proba de sărituri de la trambulină.
52

Fig. 27. Poziţiile consecutive ale liniei punctate dintre umerii şi gleznele unui săritor cu schiurile pot fi folosite pentru a determina tipul de mişcare al corpului a) liniară sau b)
neliniară.
Când punctele corpului se mişcă pe o circumferinţă în jurul unei
axe, mişcarea este de rotaţie. (fig.28).
Fig.28. Mişcarea de rotaţie în jurul axei transversale
53

Mişcările lineare şi de rotaţie (fig.29– 30) se întâlnesc frecvent în
educaţia fizică, atletism în reabilitare, fie împreună, fie în combinaţii de
mai multe mişcări lineare şi de rotaţie.
În astfel de mişcări vorbim de mişcare generală (fig.31).
Fig.29. Mişcarea de rotaţie a braţelor produce o mişcare liniară a restului corpului
Fig.30. Mişcarea de rotaţie a membrelor inferioare ce produce mişcarea lineară a prăjinii
54

Fig.31. Mişcarea generală a corpului la cal cu mânere
4.1.2. Viteza şi acceleraţia
Reperul faţă de care se execută o mişcare şi direcţia de mişcare se
referă la spaţiul tridimensional în care se realizează mişcarea respectivă.
Mişcarea se excută şi cu viteze deosebite, ceea ce impune ca studiul ei să
se refere nu numai la spaţiul ci şi la timpul în care se realizează. Astfel în
întrecerile sportive, în alergare, patinaj, schi, ciclism, canotaj,
automobilism, etc. concurenţii străbat acelaşi drum însă în intervale de
timp diferite. Rezultă că mişcarea mai are o calitate: viteza. Noţiunea de
viteză a fost introdusă în cinematică de către Galileu, înca din anul 1638,
tot GALILEU a intrudus şi noţiunea de acceleraţie ca un indice al
modificării vitezei în timp.
Spaţiul, viteza şi acceleraţia reprezintă datele de bază care permit
studiul mişcărilor şi de aceea sunt considerate în cinematică vectori.
55

Aceşti vectori au o anumită valoare cifrică şi o anumită direcţie. După
viteza ei, mişcarea poate fi uniformă sau variată. In mişcarea uniformă
punctul care se mişcă parcurge spaţii egale în perioade de timp egale.
S = V x t, iar V = S/t
În mişcarea variată, viteza se schimbă continuu.Corpul parcurge
spaţii diferite în timpuri egale. Variaţia vitezei în unitatea de timp se
numeşte acceleraţie (g). Acceleraţia (g) poate fi uniform variată sau
neuniformă.
Când acceleraţia păstrează valoarea sa (uniform încetinită sau
uniform accelerată) mişcarea este uniform variată. Căderea unui corp în
vid este exemplul clasic de mişcare uniform variată. Când acceleraţia îşi
modifică valorile, mişcarea este neuniformă. Majoritatea exerciţiilor
fizice sunt mişcări neuniforme din acest punct de vedere. Acceleraţia (g
pozitiv) îndreptată în sensul mişcării se numeşte acceleraţie pozitivă şi
măreşte viteza mişcării (ca în săritura cu paraşuta), cea îndreptată în sens
opus mişcării se numeşte accelerţtie negativă, (g – negativ) şi micşorează
viteza mişcării (ca în săriturile în sus la înalţime sau cu prăjina).
Concluzie:
Am descris în capitolul “elemente de mecanică, aplicate la corpul
omenesc”, aspectele fundamentale ale mecanicii aplicate, pe care în
capitolele ce vor urma le vom adapta la specificul mişcării umane.
56

CAPITOLUL V. NOŢIUNI DE MECANICĂ APLICATE LA
APARATUL LOCOMOTOR
Aparatul specializat care îndeplineşte funcţia locomotorie a
organismului, se numeşte aparat locomotor. El este alcătuit dintr-un
complex de organe cu structuri şi funcţii diferite.
Acestea sunt segmentele osoase, muşchii striaţi, articulaţii, o
bogată reţea nervoasă (alcătuită din căile aferente şi eferente care
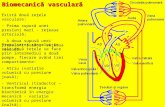
comandă mişcarea) şi reţeaua vasculară care irigă toate componentele
aparatului locomotor.
Locomţia, mişcările segmentelor aparatului locomotor, exerciţiile
fizice reprezintă funcţia aparatului locomotor. Factorii morfofuncţionali
(oase, articulaţii, muşchi) care îl alcătuiesc reprezintă forma lui.
Funcţia reprezintă excitantul indispensabil vieţuirii materiei, mai
précis modul de existenţă al formei. Excitantul (funcţia) are o valoare
trofică, întreţinând forma, dar nu direct ci prin intermediul sistemului
nervos. Deci forma este permanent modelată de funcţie, este o formă
funcţională.
Din coroborarea acţiunilor factorilor morfo-funcţionali (impulsuri
nervoase, contracţii musculare, pârghii osoase, mobilitate articulară)
rezultă exerciţiile fizice. Acestea produc tensiuni asupra factorilor morfo-
funcţionali pe care-i structurează funcţional.
5.1. Proprietăţile mecanice ale osului
Osul este supus în timpul exerciţiilor fizice, la variate şi repetate
solicitări mecanice, produse de acţiunea forţelor externe (gravitaţia) şi a
forţelor interne (contracţia musculară, forţele elastice, vâscozitatea etc).
57

Aceste forţe sunt în mare parte responsabile de dezvoltarea
osului, de orientarea structurii şi de încărcarea sa cu substanţe minerale.
Exemplul cel mai caracteristic este acela al bazinului a cărui
organizare de ansamblu (fig.32) este asemănată cu noţiunea de cheie de
boltă din arhitectura (fig.33).
Fig. 32. Fortele care actioneaza la
nivelul centurii pelviene
Fig. 33. Cheia de bolta din arhitectura
.
Această arhitectură este vizibilă şi la nivelul extremităţii superioare a
femurului pe o secţiune longitudinală (fig.34).
Forţele mecanice externe declanşate de exerciţiile fizice,
acţionează asupra ţesuturilor şi organelor. Aceste forţe mecanice externe
sunt în număr de cinci:
a). forţele de compresiune care tind să deformeze ţesuturile
comprimandu-le;
b). forţele de încovoiere care tind să deformeze ţesuturile
îndoindu-le;
c). forţele de torsiune care tind să deformeze ţesuturile răsucindu-le;
58

d). forţele de forfecare ce rezultă din combinarea a trei forţe
(compresiunea, încovoirea, torsiune), care tind să deformeze ţesutul
comprimându-l, îndoindu-l şi răsucindu-l în acelaşi timp. Aceste patru
tipuri de forţe mecanice externe enumerate mai sus rezultă în special din
acţiunea forţelor gravitaţionale greutatea corpului, greutatea segmentelor,
greutatea obiectelor sau a aparatelor cu care se lucrează;
e). forţele de tracţiune tind să deformeze ţesuturile, întinzându-
le. Ele rezultă în special din acţiunea tonusului muscular şi a contracţiilor
diferitelor grupe musculare.
În afara forţelor mecanice externe, asupra ţesuturilor acţionează
şi o serie de forţe mecanice interne rezultate din procesele de dezvoltare
ale ţesuturilor, presiunea vasculară, procesele metabolice, factori chimici
etc. Ţesutul asupra căruia acţionează o forţă oarecare, reacţionează printr-
un răspuns, care este sub forma unei stări speciale de tensiune.
Starea de tensiune, este cea care acţionează asupra ţesutului, în
sensul structurării funcţionale a acestuia, conform cerinţelor mecanice.
Aceste structuri tisulare apărute sub influenţa forţelor mecanice sunt
numite mecanostructuri.
Fig.34. Traveele osoase indica liniile de forta carora le este supus osul.
59

În concluzie, se poate afirma că, deşi în organismul vieţuitoarelor
există mecanostructuri nu toate aspectele structurale sunt un caz
particular al structurilor funcţional; pe lângă ele există structuri
determinate de alţi factori fizici, chimici, metabolici.
Factorii mecanici pot provoca direct orientarea structurii
ţesuturilor asupra cărora acţionează, dar geneza acestuia este determinată
de sistemul neuro-endocrin.
Prin intermediul exerciţiilor fizice se pot influenţa structurile
funcţionale, activându-se procesele biochimice tisulare şi intensificându-
se schimburile din substanţa fundamentală a ţesuturilor conjunctive,
cartilaginos şi osos, care alcătuiesc aparatul locomotor.
Rezistenţa. Sub influienţa exerciţiilor fizice, structura oaselor se
modifică concomitent cu creşterea rezistenţei la factorii mecanici. Astfel,
au fost descrise modificări osoase caracteristice la piciorul de bătaie al
săritorilor, la fotbalişti, boxeri, etc.
Osul are o rezistenţă mai mare la compresiune decât la tracţiune.
Rezistenţa la compresiune se datoreşte cristalelor de fosfat de calciu.
Rezistenţa la tracţiune provine atât din prezenţa cristalelor cât şi a
fibrelor de colagen.
Radiusul este osul cel mai rezistent la tracţiune; el solidarizează
mâna de braţ în special în exerciţiile din poziţia atârnat (fig.35)
Femurul este osul care rezistă cel mai bine la compresiune (fig. 36).
60

Fig. 35. Radiusul este
cel mai rezistent la
tracţiuni.
Fig. 36. Femurul este
osul cel mai rezistent la
compresiune.
Rezistenţa osului este mai solicitată în activităţile dinamice decât
în cele statice.
Anizotropia este o altă proprietate mecanică a osului care se referă la
faptul că osul nu prezintă acelaşi grad de elasticitate în toate sensurile.
Microstructurile, ca cele ce se referă la cristalele de fosfat, de calciu,
vasele de sânge, fibrele de colagen, fibrele elastice, sunt orientate după
axul longitudinal al osului.
Plasticitatea. Deformarea plastică a osului este mare mai ales
atunci când forţele ce acţionează asupra sa sunt reprezentate de
încărcături mari. Astfel, forma osului poate fi remodelată, pentru a
susţine adecvat forţele mecanice, prin osteoliza şi osteogeneză.
Solicitarea fizica continuă stimulează depunerea osteoblastică a osului.
Aceasta plasticitate este deosebit de importantă la copil, pentru că
organismul acestuia este maleabil, deci «modelabil» când este supus la
61

încărcătură importantă. In această situaţie dacă nu se vor lua din timp
măsurile curente, vor apărea deformaţii care pot deveni ireversibile
(deformări ale oaselor lungi, incluziuni ale discurilor intervertebrale pe
platoul vertebral etc).
Oboseala osului. Acţiuni repetate şi de intensitate mare care se
apropie de limita superioară a capacităţii elastice a osului, pot produce
fractură de oboseală. Aceste fracturi apar în cursul surmenajului structurii
osoase, prin instalarea unei insuficienţe a proceselor de remaniere osoasă
şi o oboseală a lanţurilor musculare.
5.2. Proprietăţile mecanice ale muşchilor
Muşchii sunt organe care aparţin aparatului locomotor. Ei au
proprietatea de a se contracta.
Configuraţia muşchiului striat (scheletic). Un muşchi este alcătuit din
două părţi:
- o parte mediană, densă, de consistenţă moale şi roşie,
care este partea contractilă a muşchiului numită şi
corpul mşchiului;
- o parte care alcătuieşte extremităţile muşchiului densă,
albă, sidefie este partea tendinoasă.
Inserţiile musculare se realizează cu ajutorul tendoanelor fie pe
os, fie pe cartilaje, fie pe aponevroze (tendoane lăţite), fie direct pe piele
(sunt muşchii pieloşi).
Adesea tendonul de inserţie este foarte scurt când implantarea
fibrelor musculare pare să se facă direct pe zona de inserţie. Inserţiile se
diferenţiază şi prin aspectul lor funcţional :
- o inserţie este fixă numită origine (proximală)
62

- cealaltă mobilă numită inserţie (distală).
Cel mai frecvent tendonul distal este cel mai mobil şi mai alungit, decât
tendonul proximal, ansamblul muscular conferând segmentelor
membrelor au aspect de trunchi de con cu baza mare situată proximal.
Implantarea fibrelor musculare pe tendon poate să se facă fie ca ele să
prelungească fibra tendinoasă, fie ca ele să ia o direcţie oblică faţă de
axul lung al muşchiului (fig 37; 38).
Fig.37. Structura care permite
deplasare mare.
Fig. 38. Structura care arată că orientarea
fibrelor musculare nu produce deplasare
mare în timpul contracţiei lor. Ea se opune
forţelor de tracţiune.
Fibrele tendinoase ale tendoanelor scurte sunt paralele între ele şi
cu axul lung al muşchiului.
Fibrele tendinoase ale tendoanelor lungi, sunt adesea helicoidale sau
reflectate la nivelul extremităţilor dând muşchiului un rol de amortizare,
de bară de torsiune.
5.3. Lanţurile articulare
63

Articulaţiile care participă la executarea unei mişcări, se asociază
pentru a forma lanţuri articulare.
Două segmente osoase articulate mobil, formează un cuplu
cinematic (de exemplu braţul cu antebraţul sau coapsa cu gamba); mai
multe segmente articulate mobil, formează un lanţ cinematic (de
exemplu segmentele care formează membrul superior, braţul, antebraţul
şi mâna sau membrul inferior, coapsa, gamba şi laba piciorului).
Lanţurile cinematice pot fi :
- deschise;
- închise;
- parţial închise.
5.3.1. Lanţuri cinematice deschise
Deschise, când este vorba de o suită de segmente articulate între ele,
dintre care cel mai distal are o extremitate liberă, de exemplu un
segment fix celălalt mobil, cotul rămâne fix în momentul flexiei
antebraţului pe braţ (fig. 39 a) ; două segmente mobile: braţul şi
antebraţul în timpul flexiei şi extensiei cotului din poziţia sprijin
facial; - trei segmente mobile braţul, antebraţul şi mâna în momentul
lansării mingiei.
64

Fig. 39 a. Lanţ cinematic deschis
5.3.2. Lanţuri cinematice închise
Închise când ambele capete ale lanţului sunt fixate (fig.39 b).
Fig. 39 b. Lanţ cinematic închis
65

De exemplu când punctele fixe, sunt la nivelul mâinilor şi
picioarelor, aşa cum se întâmplă în escalada din alpinism (fig.40).
Fig. 40
Alpinistul realizează aici câte două puncte de sprijin extreme.
Mâinile şi picioarele sunt fixate, greutatea corpului creează aici două
efecte (forte) F1 şi F2 (noţiune legată de paralelogramul forţelor), F1
este dirijat spre sprijinul inferior şi devine F1’ transmite peretelui de
escaladă efectul lui F1 la nivelul picioarelor.
F’1 poate fi descompus într-o forţă orizontală f’1h anulată prin
reacţia peretelui, şi într-o forţă verticală f’2 v. Această componentă
verticală este o componentă de cădere; este nevoie să o diminuăm
deci :
66

f ’ 2v= F1’ cos alfa = F1 cos alfa
Pentru a-l diminua pe f1 2v trebuie să diminuăm cos alfa, adică să-l
creştem pe alfa. Aceasta se realizează dacă alpinistul îndepărtează G
(centrul de greutate) de peretele de escaladat. F2 are acelaşi efect ca
F’2 acţionând la nivelul sprijinului superior; F’2 are o componentă
f’2 h de smulgere care impune o puternică participare a flexorilor
degetelor.
5.3.3. Lanţuri cinematice parţial închise
Parţial închise când există o suită de segmente articulate între ele,
când o extremitate corespunde unui punct fix, iar cealaltă corespunde,
unei puternice rezistenţe.
De exemplu: membrele superioare în timpul mobilizării lor în
poziţia culcată a corpului; membrele inferioare în stând cu genunchii
uşor flexaţi (fig.41).
Fig 41
67

Stând cu genunchii uşor flexaţi reprezintă un lanţ articular, închis
parţial, greutatea corpului P se poate descompune într-o componentă F1
perpendiculară pe axa care leagă articulaţia coxo-femurală de genunchi.
Se numeşte componentă de rotaţie. Ea trage bazinul posterior, şi tinde să
închidă unghiul bazin-coapsă. Muşchii fesieri, extensori ai articulaţiei
coxo-femurale se opun acestei componente.
F2- F’2 are aceleaşi efecte ca F’2 aplicat la nivelul genunchiului.
Este denumită componentă longitudinală. Ea tinde să tragă genunchiul
anterior prin componenta F4. Această tendinţă de flexie a genunchiului
este contracarată de cvadriceps F3 componenta longitudinală a lui F’2,
acţionează în direcţia articulaţiei tibio-tarsiene a cărei componentă
orizontală F’3 are o componentă orizontală f3 care trage calcaneul
posterior. Această tendinţă de flexie a glesnei este contracarată de
tricepsul sural. Fesierii, cvadricepsul şi tricepsul constituie un lanţ
muscular de extensie a membrului inferior, care se opune greutăţii P, a
corpului.
Articulaţiile realizează legătura mecanică dintre pârgiile osoase.
Majoritatea articulaţiilor corpului sunt mobile, permiţând mişcări în
diferite direcţii. Mişcările în articulaţie pot fi de rotaţie, în jurul unui ax
sau de alunecare (translaţie).
Mişcările sunt condiţionate de forma oaselor care alcătuiesc
articulaţia.
Intr-un lanţ cinematic deschis, mobilitatea fiecărui segment este cu
atât mai mare, cu cât se apropie de extremitatea liberă; mobilitatea unui
segment de membru (gamba, antebraţul, etc) este egală cu mobilitatea sa,
plus mobilitatea segmentelor care o preced. Astfel, coapsa are trei grade
de libertate (mişcări în trei axe) iar gamba şi laba piciorului are câte un
68

grad de libertate; laba piciorului în ansamblul membrului inferior are în
total cinci grade de libertate (de mişcare), dintre care unul propriu (în
articulaţia gleznei) şi celelate aparţinând segmentelor precedente (gambă
şi coapsă).
5.4. Lanţurile cinematice musculare
Muşchii, pentru mobilizarea lanţurilor cinematice, formează lanţuri
musculare, care sunt o înlănţuire de grupe musculare. Ele corespund unei
asocieri mecanice a muşchilor cu funcţii identice la nivelul unei
articulaţii, a mai multor articulaţii, chiar al corpului în ansamblu când
acesta execută, un gest sportiv global.
5.4.1. Acţiunea musculară localizată şi extinsă
Muşchii se clasifică funcţional în: flexori, extensori, anteductori,
retroductori, abductori, etc.
De exmplu: semimembranosul, semitendinosul, bicepsul crural,
marele fesier sunt muşchi extensori ai articulaţiei coxofemurale. Acţiunea
fiecăruia din aceşti muşchi, este localizată la articulaţia corespunzatoare,
în timp ce ischio-gambierii situaţi pe partea posterioară a coapsei, sunt
extensori şi în articulaţia genunchiului.
Astfel o parte a forţei anumitor muşchi poate interveni în execuţia
mişcărilor, să ajute executarea unei mişcări, dar nu să o producă: aceasta
este acţiunea localizată.
Dar pentru ca acţiunea localizată să poată avea loc, este nevoie ca şi alţi
muşchi să fie puşi în joc. In sprijin pe un picior; dacă se ridică membrul
inferior opus, alţi muşchi intervin pentru a da un punct de sprijin
69

muşchilor motori. Blocarea bazinului, acolo unde se inseră muşchii
flexori ai articulaţiei coxo–femurale, se va realiza prin participarea
muşchilor fesieri, din partea piciorului de sprijin şi printr-o contracţie a
musculaturii abdominale.
Dacă mişcarea este intensă, bruscă, violentă, acest blocaj, va necesita
imobilizarea toracelui prin blocaj ventilator, ce se va obţine prin
tensiunea muşchilor expiratori şi inspiratori (diafragma şi inspiratorii
accesori). Acţiunea musculară se extinde din aproape în aproape cu atât
mai mult, cu cât exerciţiul este mai intens şi pune probleme de echilibru.
Se stabilesc astfel, lanţuri musculare (exemplu, aruncătorul de suliţă din
fig. 42).
Fig.42. Schiţa lanţurilor musculare ale extensorilor şi flexorilor membrului inferior
al trunchiului şi membrului superior care asigură aruncarea suliţei
70

5.4.2. Modalităţi de acţiune a muşchilor
In funcţie de modul cum se grupează în jurul articulaţiei, muşchii
îndeplinesc acţiuni diferite. Ei pot avea :
o acţiune motrică principală
În funcţie de acţiunea motrică, chiar de mişcare, muşchiul motor
principal este cel care provoacă mişcarea, numit muşchi agonist.
o actiunea fixatoare
Un muşchi se numeşte fixator când imobilizează, o parte a corpului
permiţând acţiunea altor muşchi.
Această acţiune fixatoare trebuie să fie proporţională cu nevoile, în
caz contrar, mişcarea devine încordată şi necoordonată.
Ea poate varia în intensitate în cursul mişcării şi se poate uneori chiar
transforma în acţiune motrică principală.
o acţiune sinergică
Muşchii se numesc sinergici când îndeplinesc în comun anumite
mişcări, dar şi fiecare în parte poate efectua acţiuni diferite.
De exemplu: mişcarea de coborâre a centurii scapulare este efectuată
de muşchiul marele pectoral şi marele dinţat ca muşchi sinergici.
Ridicarea coastelor (inspiraţia) este asigurată de muşchii sinergici:
marele pectoral, marele dinţat, scalenii.
acţiune motrică paralelă
Acţiunea unor anumiţi muşchi, va permite, adaptarea mişcării
unui scop anume.
Aruncătorul îşi plasează bazinul, în direcţia lansării finale,
înaintea fazei efortului final (care este o extensie explozivă).
Acţiunea la distanţă este aceea a unor muşchi care îşi pot
transfera forţa unei articulaţii îndepărtate (vezi fig.42)
71

5.4.2.1. Acţiunea antagonistă
Muşchii antagonişti, sunt cei ce execută mişcări opuse, în
articulaţiile pe care le mobilizează şi reprezintă principala frână a
mişcării.
Atunci când mişcarea, este foarte rapidă ei nu reuşesc să
amortizeze mişcarea şi solicitarea, se transmite ligamentelor şi capsulelor
articulaţiilor care pot suferi traumatisme.
Antagonismul muscular nu trebuie privit numai ca o frână în
reglarea mişcărilor, ci şi ca o adaptare în scopul realizarii unei reglări cât
mai fine şi mai precise, a acţiunilor.
Această adaptare, apare şi se dezvoltă în procesul
antrenamentului, fiind dependentă de scoarţa cerebrală. La începători se
remarcă mişcări neeconomice, uneori inutile, lipsite de precizie care însă
cu timpul pe măsura apariţiei şi consolidării, legăturilor temporare din
scoarţa cerebrală, devin economice şi precise.
5.5. Tipurile de activitate musculară
Musculatura corpului dezvoltă două tipuri de activitate
musculară: statică şi dinamică.
Activitatea statică, de asigurare posturală este rezultatul
contracţiei statice-izometrice a grupelor şi a lanţurilor musculare; ea nu
duce la scurtarea muşchiului şi nici la deplasarea segmentelor. Acest tip
de activitate statică provoacă o oboseală rapidă pentru că solicită puternic
centrii nervoşi şi comprimă vasele sanguine şi limfatice şi astfel
îngreunează circulaţia sângelui şi a limfei la nivelul muşchilor.
Activitatea dinamică este rezultatul contracţiei izotonice a muşchilor; ea
72

se caracterizează prin scurtarea muşchilor şi deplasarea segmentelor sau a
corpului în întregime. In timpul activităţii dinamice musculatura corpului
efectuează un lucru mecanic proporţional cu forţa şi lungimea scurtării.
Circulaţia şi procesele metabolice la nivelul muşchilor sunt favorizate.
Cercetările au arătat că cele două tipuri de activitate musculară au o serie
de particularităţi biomecanice. Astfel activitatea musculară statică este de
trei feluri :
o de consolidare;
o de fixare;
o de menţinere.
Aceste trei feluri de activitate musculară statică sunt legate de
condiţiile de echilibru ale corpului omenesc sau ale segmentelor sale
(fig.43).
Fig.43. Formele de lucru static muscular de:
a) mentinere, b) consolidare, c) fixare
73

5.5.1. Tipurile de activitate musculară statică
5.5.1.1. Efortul static de consolidare
Efortul static: diferă în cazul poziţiilor cu echilibru stabil
sau instabil fiind cele două posibilităţi de echilibru în care se pot afla
fiinţele vii.
Astfel corpurile se află în echilibru stabil când C.G.G se află sub
baza de susţinere ca în poziţia atârnat şi în variantele sale, efortul
static se numeşte de consolidare întrucât grupele şi lanţurile
musculare se opun forţelor de tracţiune care la nivelul articulaţiilor se
manifestă ca forţe de disrupţie având tendinţa de a disloca articulaţiile
punând în stare de tensiune capsula şi ligamentele cu atât mai mult cu
cât solicitarea este mai mare.
In poziţia atârnat la bară fixă greutatea corpului va exercitata
asupra articulaţiilor o tracţiune cu atât mai mare cu cât articulaţia
este mai aproape de baza de susţinere descrescând spre extremităţile
inferioare; efortul static este mai mare dacă se adaugă o îngreunare.
In activităţile sportive efortul static se îmbină cu cel dinamic frecven.
Astfel se întâmplă în efectuarea gimnasticii la bara fixă, (static la
trecerea pe sub bară), aruncarea ciocanului, suliţei, jocurilor sportive.
In aceste activităţi sportive se depune un efort combinat static şi
dinamic, care trebuie diferenţiat şi avut în vedere în metodica
antrenamentului.
Efortul static de consolidare solicită concomitent grupele şi
lanţurile musculare antagoniste. De aceea exerciţiile care folosesc
acest tip de efort angrenează concomitent atât muşchii agonişti cât şi
74

antagonişti. Poziţiile cu echilibru stabil pot fi folosite atât în practica
culturii fizice medicale cât şi în antrenamentul sportiv atunci când
urmărim o creştere a forţei pe grupe şi lanţuri musculare global.
5.5.1.2. Efortul static de fixare
În cazul poziţiilor cu echilibru nestabil unde C.G.G se află
deasupra bazei de susţinere cum sunt poziţiile stând şi numeroasele
lor variante; efortul static se numeşte de fixare sau de echilibrare.
Grupele şi lanţurile musculare se opun forţelor care tind să
dezechilibreze corpul fixându-l în poziţia respectivă.
Condiţiile de echilibru nestabil determină forţe care se
manifestă la nivelul articulaţiilor sub forma de presiune; aceasta fiind
cu atât mai mare cu cât îngreunarea este mai importantă.
Efortul static de fixare creşte pe măsură ce ne apropiem de
baza de susţinere şi în funcţie de gradul de stabilitate.
Astfel dacă unghiul de stabilitate (care este unghiul format de
verticala C.G.G şi dreapta care uneşte acest centru cu marginea bazei
de susţinere) este mic efort static are o valoare mare şi invers. De
exemplu în poziţia stând unghiul de stabilitate este mai mic deât în
poziţia stând sau culcat; pentru acest motiv în poziţia stând solicitarea
statică de fixare este mai mare decât în poziţia stând sau culcat.
La fel ca în poziţiile cu echilibru stabil şi în poziţiile de
echilibru nestabil efortul static solicită concomitent grupe de lanţuri
musculare antagoniste, de aceea exerciţiile care folosesc efortul static
de fixare angrenează atât agoniştii cât şi antagoniştii diferitelor
articulaţii. De aceea aceste poziţii pot fi folosite atât în cultura fizică
75

medicală, cât şi în antrenamentul sportiv, pentru dezvoltarea calităţii
de forţă, la grupe şi lanţuri musculare luate în întregime.
În cele două tipuri de activitate musculară (consolidare şi
fixare) descrise mai sus forţa de gravitaţie acţionează de-a lungul axei
verticale a corpului sau a segmentelor sale, aflate în echilibru stabil,
sau nestabil şi trece prin centrul de greutate (C.G.G) a corpului.
5.5.1.3. Efortul static de menţinere
Corpul omenesc şi segmentele sale, se pot afla în poziţii
complexe, în care forţa de gravitaţie nu mai acţionează în lungul axei
verticale, care trece prin C.G.G, de exmplu cum ar fi poziţiile atârnat
echer stând cu braţele lateral, stând cu piciorul flectat înainte, în care
apar solicitări statice care diferă de efortul de consolidare şi fixare. In
aceste poziţii complexe, musculatura corpului luptând împotriva
gravitaţiei care tinde să-i schimbe poziţia, depune un alt tip de efort
static numit de menţinere.
Efortul static de menţinere se întalneşte atât în poziţiile cu
echilibru stabil, cât şi în cele cu echilibru instabil.
Important din punct de vedere biomecanic, este faptul că la
asigurarea unor astfel de poziţii, nu mai contribuie grupe şi lanţuri
musculare antagoniste, ci numai unele din acestea. Datorită acestui
fapt grupele sau lanţurile musculare respective pot fi antrenate
selectiv în vederea creşterii calităţilor motrice şi în primul rând al
forţei, folosindu-se poziţii cu îngreuiere.
De aceea este necesar să facem o analiză cât mai amănunţită a
oricărei poziţii statice, să recunoaştem lanţul muscular care depune
efortul de menţinere, pe fondul general de fixare sau consolidare.
76

Astfel vom putea da recomandări practice ştiinţifice, prin care
sportivul să antreneze prin eforturi izometrice elementul motric,
complex specific ramurii sportive pe care o practică.
5.5.2. Tipurile de activitate musculară dinamică
Activitatea dinamică a musculaturii corpului are două particularităţi
de:
- învingere;
- cedare.
5.5.2.1. Activitatea de învingere
Activitatea de învingere, numită şi contracţie concentrică este
acel tip de contracţie dinamică în care muşchiul se scurtează şi
mobilizează oasele printr-o mişcare concentrică de apropiere; muşchii
antagonişti sunt întinşi şi prin aceasta contribuie la frânarea mişcării.
5.5.2.2. Activitatea de cedare
Activitatea de cedare, numită şi contracţie excentrică este acel tip
de contracţie dinamică în care muşchiul efectuează mişcări prin cedarea
progresivă a stării sale de contracţie; în timpul activităţii de cedare
lungimea muşchiului creşte.
Exemplu: înclinarea înainte a corpului poate fi produsă prin
contracţia de învingere a musculaturii pereţilor abdominali sau prin
contracţia de cedare a muşchilor şanţurilor vertebrale care sunt
antagoniştii primilor. De asemenea flexia coapsei pe bazin poate fi
77

produsă de grupa flexorilor coapsei, iar dacă corpul este culcat pe o
banchetă cu faţa în jos aceeaşi mişcare rezultă din efortul dinamic de
cedare a extensorilor coapsei care luptând în potriva gravitaţiei, cedează
treptat din contracţia lor şi permit astfel mişcări de flexie.
Din datele prezentate rezultă un lucru de cea mai mare
importanţă în biomecanică şi anume: aceeaşi grupă musculară poate în
unele condiţii, să efectueze mişcarea prin scurtare, ca şi mişcarea opusă
ei, dar prin alungire (cedare), astfel grupa flexorilor antebraţului pe braţ
apropie (flectează) cele două segmente prin contracţia de învingere sau le
depărtează (mişcarea de extensie) prin contracţie de cedare. În acest fel
denumirea de muşchi flexori din anatomia funcţională devine improprie
pentru că aceeaşi muşchi pot efectua şi mişcarea opusă, principiul este
valabil pentru toate grupele musculare. In biomecanică se foloseşte pe
lângă denumirea grupei şi aceea a sensului activităţii musculare
dinamice pe care o efectuează. Acest lucru are o importanţă
fundamentală în biomecanică, cunoaşterea tipului de activitate musculară
dinamică aducând un mare aport la îmbunătăţirea metodicii
antrenementului sportiv. Iată un exemplu edificator în acest sens. Este
mişcarea de tracţiune la bară fixă. In prima fază de ridicare a corpului
acţionează un lanţ muscular format de: flexorii degetelor şi ai
antebraţului, retroductorii în articulaţia braţului, coborâtorii scapulei şi
basculatori mediali ai scapulei. Activitatea dinamică dezvoltată de acest
lanţ muscular la ridicarea corpului este de învingere. In faza a doua a
mişcării de coborâre tot acelaşi lanţ muscular asigură mişcarea, însă prin
activitatea de cedare.
Exerciţiile de tracţiune la bară se folosesc în antrenamentele
sportive şi ca normă de control a pregătirii fizice. Creşterea calităţii
motrice se face pe baza solicitărilor de învingere sau de cedare, important
78

este de a cunoaşte care dintre aceste activităţi au o contribuţie mai mare
la creşterea calităţii motrice şi de a aplica aceste două tipuri de activitate
musculară, în metodica antrenamentului sportiv proporţional cu
eficacitatea lor. Exemplu: săritura în lungime (cu sau fără elan) în faza de
impulsie acţionează lanţul muscular al triplei extensii prin contracţia
musculară dinamică de învingere; la aterizare acţionează acelaşi lanţ
muscular, însă prin efortul muscular de cedare.
Rezultă că în pregătirea săritorilor trebuie să ţinem
seama de ambele tipuri de activitate şi a le acordăm importanţa
cuvenită în metodica antrenamentului.
5.6. Principalele lanţuri musculare ale corpului
Lanţurile musculare (cum s-a mai arătat într-un capitol anterior)
sunt o entitate biomecanică care mobilizează lanţurile cinematice
deschise, închise şi parţial închise. Ele sunt formate dintr-o succesiune de
grupe musculare, care se înlănţuiesc în jurul lanţurilor cinematice şi sunt
elementul motor al acestora. Din felul în care se înlănţuiesc diversele
grupe musculare, lanţul muscular poate avea aspect spiral, ondulat,
trecând ventral sau dorsal de articulaţii, oblic sau înfăşurându-se în
diferite sensuri, după specificul mişcării pe care trebuie să o asigure (fig.
44 a şi b).
De aceea, nu se poate vorbi numai de lanţuri musculare,
standard, ci de numeroase lanţuri musculare, corespunzătoare mişcărilor
complexe, pe care le asigură. Activitatea lanţurilor musculare, poate fi
statică şi dinamică.
79

Fig. 44 a. Lanţuri musculare spirale
(vedere laterală) Fig. 44 b. Lanţuri musculare spirale
(vedere ventrrală)
În organismul omului, există foarte multe lanţuri musculare care
asigură poziţiile şi mişcările şi care solidarizează motric, diversele
segmente: capul, trunchiul şi membrele.
Există o serie de lanţuri musculare, care pot fi considerate
standard, iar pe lângă ele mai sunt numeroase, altele pe care le vom
analiza la mişcările complexe (fig. 45, 46).
80

Fig. 45. Lanţuri musculare dorsale ale
trunchiului
Fig.46. Lanţuri musculare ventrale ale trunchiului
5.6.1. Lanţurile musculare ale membrului superior
Cuplurile cinematice ale membrului superior sunt:
- torace–centura scapulară;
- centura scapulară–braţ;
- braţ–antebraţ;
- antebraţ–mână.
Pentru mobilizarea acestor cupluri, fie a lanţurilor cinematice
ale membrului superior există numeroase lanţuri musculare.
81

Dinamica membrului superior este foarte variată, fiind legată în
special de mobilitatea deosebită a centurii scapulare faţă de trunchi,
putând efectua mişcări de ridicare, coborâre, deplasare ventro-laterală,
deplasare dorso–medială, vasculo–medială şi laterală. De aceea, la acest
nivel există numeroase lanţuri musculare, care se reduc spre cot şi
mână. Astfel, la membrul superior, pornind de la centura scapulară, vom
avea şase lanţuri musculare, care se concentrează la cot în numai două,
pentru a deveni la articulaţia radio-carpiană, patru (fig.47
Fig. 47 Lanţuri musculare ale membrului superior
Dacă mai socotim că, la nivelul degetelor, numărul lanţurilor
musculare se măreşte din nou, vom înţelege de ce membrul superior şi
mâna propriu-zisă, poate îndeplini rolul de exponent, al activităţii
psihice prin limbajul gestului.
Datorită posibilităţilor centurii scapulare de a efectua o serie
de mişcări simple, sau complexe, succesive sau simultane, cuplurile şi
lanţurile motrice sunt într-o permanentă condiţionare, putând realiza
mişcări deosebit de complexe ca: prehensiunea, împingerea, aruncarea,
82

lovirea, etc. În plus, membrul superior, poate efectua şi sprijinul parţial
sau total.
Vom descrie lanţurile musculare care asigură aceste mişcări
precum şi sprijinul.
5.6.1.1. Mişcarea de prehensiune
Mişcarea de prehensiune–este specifică omului şi vertebratelor
superioare şi constă din posibilitatea pe care o are mâna de a efectua pe
lângă flexia degetelor şi mişcarea de opoziţie, care opune policele
celorlalte degete. De aceea mâna omului, are posibilitatea de a prinde ca
într-o pensa, diverse obiecte de uz obişnuit, unelte de muncă sau obiecte
sportive (greutate, mingie, rachete de tenis, halteră, etc., (fig 48).
Fig.48. Lanţul muscular al membrului superior care asigură mişcarea de prindere (prehensiune) a unei haltere
Prehensiunea se asigură de numeroşi muşchi şi poate fi gradată, ca
forţă (prinderea de aparate) şi precizie (manevrarea rachetei de tenis, a
83

unor instrumente de precizie, etc). Ea este îndeplinită de muşchii flexori
lungi ai degetelor cu originea pe oasele antebraţului, flexorii scurţi cu
origine pe scheletul mâinii (muşchii lombricali şi interosoşi).
Participarea simultană sau succesivă a acestor muşchi în executarea
mişcării, îi dă fie forţă, fie precizie, fie pe ambele după cum este cazul.
Principalul rol în prehensiune îl are policele şi numeroşii muşchi care
îl mobilizează.
5.6.1.2. Mişcarea de împingere
Mişcarea de împingere se realizează prin acţiunea simultană a
muşchilor care execuă bascula laterală şi deplasarea ventro–laterală a
scapulei, abductorii şi anteductorii braţului, extensorii cotului, flexorii
carpului degetelor (fig 49).
Fig.49. Lanţul muscular al membrului superior care asigură mişcarea de
împingere a unei haltere
84

În activitatea sportivă, această mişcare este principala forţă
motrică din, aruncări, box, ridicarea halterei, precum şi în unele tehnici
din jocurile sportive.
Ea se poate folosi şi în unele exerciţii din antrenamentul sportiv
cum ar fi lucrul la helcometru, prin împingere, de la sol sau de la
aparate.
Deşi mişcarea este propie membrului superior, ea antrenează şi
alte lanţuri musculare ale corpului sau membrului inferior, care face priza
pe sol.
5.6.1.3. Mişcarea de prindere în braţe
Mişcarea de prindere în braţe specifică tehnicilor din lupte libere,
judo, etc este o mişcare globală a membrelor superioare, care se apropie
între ele şi prind corpul adversarului.
Ea este îndeplinită de un lanţ muscular care porneşte de la nivelul
adductorilor braţului, centura scapulară fiind în prealabil fixată (blocată)
şi se continuă cu flexorii cotului, carpului şi degetelor.
5.6.1.4. Mişcarea de aruncare şi lovire
Mişcarea de aruncare şi lovire întâlnită în aruncări (suliţă,
greutate, disc), jocuri, volei, baschet, tenis, are particularităţi specifice şi
antrenează numeroase grupe musculare.
Principalul lanţ muscular care o asigură este format din muşchii
care execută bascula laterală şi deplasarea ventro-laterală a scapulei,
anteductorii braţului (în aruncarea greutăţii) retroductorii braţului (în
lovitura de atac la volei), extensorii cotului, flexorii carpului şi ai
85

degetelor la începutul mişcării şi extensorii carpului şi ai degetelor la
sfârşitul mişcării.
Mişcarea de aruncare şi lovire antrenează şi lanţurile musculare
ale trunchiului şi ale membrelor inferioare, care intervin în mod diferit
dacă este vorba de aruncarea discului, ciocanului, sau suliţei; (aceste
aspecte vor fi studiate detaliat la capitolul aruncări).
5.6.1.5. Mişcarea de tragere
Mişcarea de tragere din tracţiunile în braţe la bară, tragerea
(smulgerea) halterei până la nivelul umerilor, tragerea la canotaj, caiac-
canoe, înot, etc) este des folosită în activitatea sportivă.
Ea este îndeplinită, de un lanţ muscular, format din coborâtorii
scapulei, basculatorii mediali retroductorii (şi în mai mică măsură
adductorii) braţului, flexorii cotului, ai carpului şi ai degetelor.
Această mişcare este foarte des întâlnită în practica educaţiei
fizice şi a sportului, la căţărare (prajină, funie), la săritura cu prăjina (faza
pendulului lung şi scurt) precum şi în numeroase situaţii din gimnastica
sportivă şi acrobatică.
Ea este folosită şi ca normă de control a pregătirii fizice, mai
ales sub formă de tracţiuni la bară fixă.
5.6.1.6. Sprijin realizat prin membrele superioare
Membrele superioare îndeplinesc deseori şi funcţii statice de
sprijin, mai ales în activitatea sportivă. Sprijinul asigurat de către
membrele superioare este de două feluri :
- sprijin superior cum este în toate poziţiile atârnat;
86

- sprijin inferior cum este în toate poziţiile în care membrele
superioare se sprijină pe sol: poziţia stând pe mâini, podul, poziţiile în
sprijin culcat anterior sau posterior. Există şi poziţii de sprijin combinate
în care sarcinile de sprijin pe sol sau la aparate sunt îndeplinite în acelaşi
timp de către membrele superioare şi cele inferioare.
5.6.2. Lanţurile musculare ale membrului inferior
Cuplurile cinematice ale membrului inferior sunt:
- bazin–coapsă;
- coapsă–gambă;
- gambă–picior.
După cum se vede membrul inferior are mai puţine cupluri
cinematice decât cel superior, datorită faptului că centura sa de legatură
cu scheletul axial este fix (bazinul sau centura pelvină). In plus, din
punct de vedere funcţional, membrul inferior indeplineşte numeroase
funcţii statice de sprijin, pe langă cele dinamice.
Pentru mobilizarea acestor cupluri cinematice, precum şi a
lanţului cinematic al membrului inferior în întregime, există un număr de
grupe şi lanţuri musculare, mai restrâns ca la membrul superior.
Există o mare masă musculară, care dezvoltă în primul rând forţa,
dar mai puţin precizie, decât membrul superior.
Pe langă acestea, la membrul inferior s-a dezvoltat puternic un
aparat ligamentar bogat, care înlocuieşte în parte efortul muscular
necesar în asigurarea staticii corpului omenesc (tractul, iliotibial,
ligamente, fascii, tendoane, etc).
87

Centura pelviană (bazinul) nu efectuează mişcări libere cu
membrul inferior, ci numai mişcări conjugate cu ale coloanei vertebrale
de care este fixată.
Lanţurile musculare ale trunchiului mobilizează şi bazinul în
flexie pe coloana vertebrală, în extensie în mişcările laterale sau de
rotaţie (de răsucire).
Lanţul cinematic al membrului inferior este adaptat în primul
rând, staţiunii bipede şi locomoţiei care a determinat la om modificări
profunde ale scheletului, articulaţiilor şi musculaturii.
Vom descrie principalele lanţuri ale membrului inferior, care
asigură funcţiile sale statice sau de locomoţie.
5.6.2.1. Funcţia statică
Staţiunea (sprijinul pe sol sau la aparate) este asigurată în
principal de câte două lanţuri musculare antagoniste la care participă câte
trei grupe de muşchi, motiv pentru care ele au fost numite lanţul triplei
flexii şi a triplei extensii (fig.50; 51).
88

Fig. 50. Lanţul muscular al triplei flexii şi triplei extensii
ale membrelor inferioare ( vedere anterioară)
1. Grupa muşchilor
fesieri 2. Grupa muşchilor
extensori ai gambei 3. Grupa muşchilor
flexori plantari ai piciorului
4. Grupa muşchilor flexori ai gambei
5. Grupa muşchilor flexori dorsali ai
piciorului
Fig.51. Lanţurile musculare ale membrelor inferioare (vedere posterioară)
89

Lanţul muscular al triplei extensii–este mai dezvoltat şi curinde:
extensorii coapsei pe bazin, extensorii genunchilui şi flexorii plantari
(asigură ridicarea pe vârful picioarelor).
Lanţul muscular al triplei flexii cuprinde: flexorii coapsei pe
bazin, flexorii genunchiului şi flexorii dorsali ai labei piciorului (asigură
ridicarea pe călcâie).
Pentru asigurarea unei prize mai bune pe sol, la aceste lanţuri
musculare se adaugă şi grupa adductorilor coapsei.
Dat fiind ca în poziţia stând primează condiţiile de echilibru, mai
ales când sprijinul se face pe un singur picior, la aceste două lanţuri
musculare principale se adaugă şi două lanţuri musculare situate pe
părţile laterale şi mediale a membrului inferior şi anume :
Lanţul muscular format de adductorii coapsei şi supinatorii labei
piciorului, situat pe partea medială a lanţului muscular format din
abductorii coapsei şi pronatorii labei piciorului situat lateral.
Lanţurile musculare ale membrelelor inferioare, îndeplinesc pe
lângă funcţii statice, precum şi diferite mişcări, dintre care cele mai
caracteristice sunt:
-impulsia;
-amortizarea ;
-lovirea.
5.6.2.2. Funcţia dinamică
Mişcarea de impulsie este o mişcare de bază în mers, alergare,
sărituri, aruncări, etc. Lanţul muscular care asigură impulsia de la sol sau
de la aparate este tripla extensie. Datorită faptului ca impulsia este o
mişcare foarte obişnuită la om, având şi un rol important în statica
90

corpului, lanţul triplei extensii s-a dezvoltat foarte mult, comparativ cu
lanţul triplei flexii.La membrele superioare s-au dezvoltat mai mult
grupele şi lanţurile musculare ale flexorilor.
Mişcarea de amortizare este de asemenea o fază obişnuită în
mers, alergare, sărituri, etc.Ea este îndeplinită tot de lanţul triplei
extensii, însă prin activitatea «de cedare».
Amortizarea are o serie de particularităţi în alergarea de viteza şi
de fond, care se vor descrie la capitolele respective. Membrele inferioare
se comportă la aterizare, ca nişte resorturi elastice; datorită contracţiei
lanţului triplei extensii; în cazul aterizării greşite, rolul de resort elastic,
este micşorat sau suprimat, astfel ca pot surveni accidente foarte grave.
Mişcarea de lovire cu membrele inferioare este foarte variată şi
complexă executându-se în direcţii variate (şutul la fotbal). La această
mişcare, participă un alt lanţ muscular decât cel standard de la membrele
inferioare şi anume: flexorii coapsei pe bazin, extensorii genunchiului şi
flexorii dorsali ai labei piciorului. Pentru direcţionarea corectă a loviturii
mingiei, intervin şi grupele musculare care execută pronaţia şi supinaţia
labei piciorului, completând lanţul muscular descris mai sus. Activitatea
musculară are un caracter balistic, caracterizandu-se printr-o contracţie
puternică iniţială, după care mişcarea continuă din inerţie.
Concluzie:
În capitolul «Biomecanica generală» am studiat modul de aplicare a
legilor mecanicii, la specificul organismului uman şi influenţa lor asupra
aparatului locomotor (oase, articulaţii, muşchi). Sarcina biomecanicii este
însă de a elabora o parte din metodele ştiinţifice, necesare însuşirii şi
îmbunătăţirii tehnicii sportive. Totodată, biomecanica trebuie să
descopere greşelile, care apar în cursul efectuării exerciţiilor fizice şi să
indice măsurile ce trebuie luate pentru însuşirea unei tehnici
91

corespunzatoare; ea poate formula indicaţii metodice preţioase în
procesul antrenamentrului fizic. De aceea vom încheia capitolul de
biomecanică generală prin a prezenta pricipiile generale de anatomie
funcţională şi biomecanică sintetizate de
C. Baciu care vor veni în sprijinul celor interesaţi să studieze
diversele poziţii şi mişcări complexe ale organismului uman.
92

CAPITOLUL VI. PRINCIPII GENERALE DE
ANATOMIE FUNCŢIONALĂ ŞI BIOMECANICĂ
Principiul nr.1: orice mişcare începe prin stabilizarea în poziţie
favorabilă sau mobilizarea centrului general de greutate al corpului.
De exemplu în alergare, prin plecarea din startul de jos,
presupune atât pregătirea alergătorului pentru plecare, cât şi plecarea
propriu zisă, denumită lansare din start.
Lansarea din start reprezintă un efort exploziv care pretinde o
acţiune simultană a grupelor şi lanţurilor musculare respective.
Impulsul iniţial pe care-l primeşte C.G.G al corpului este dat de
contracţia bruscă, a lanţului triplei extensii şi de avântarea energică a
braţelor şi piciorului oscilant.
Manifestarea optimă a forţei declanşate de alergător la start, este
influenţată în mod direct de poziţia, pe care o va adopta la comanda
«gata» .
Poziţia pe care o ia alergătorul la comanda «gata» este
determinată de următoarele elemente principale: locul de fixare a
punctelor de sprijin, poziţia trunchilui şi înalţimea la care este fixat
bazinul.
Aceste elemente hotărăsc în bună măsură unghiurile de flexie în
articulaţiile membrelor inferioare, care joacă un rol esenţial în
impulsia iniţială.
Principiul nr.2: acţiunea mobilizatoare a segmentelor, se
realizează de la centru (C.G.G) spre periferie.
De exemplu în poziţia stând cu unul din membrele inferioare
ridicate anterior.
93

Lanţurile musculare intră în acţiune astfel: muşchii bazinului şi
trunchiului pentru a contracara căderea corpului înainte, odată cu
ascensiunea C.G.G prin contracţia ischiogambierilor care înclină
bazinul posterior şi a muşchilor şanţurilor vertebrale care menţin
trunchiul la verticală; apoi intervin muşchii pereţilor abdominali,
flexorii coapsei pe bazin şi extensorii printr-o activitate de menţinere,
muşchii extensori ai genunchiului şi flexorii plantari.
Principiul nr. 3. Membrele superioare şi inferioare acţionează ca
lanţuri cinematice închise sau deschise. De exemplu, poziţia atârnat
înseamnă lanţuri cinematice închise al membrelor superiore.
La aruncarea discului, lanţul cinematic al membrului superior
acţionează ca un lanţ deschis.
Principiul nr. 4. Când membrele superioare sau inferioare
acţionează că lanţuri cinematice deschise, muşchii care intră în
acţiune îşi i-au puncte fixe de inserţie pe capetele lor centrale
(proximale) şi acţionează asupra segmentelor prin capetele lor
periferice (distale).
De exemplu: în lovitura de atac la volei, muşchii centurii
scapulare iau punct fix pe coloană şi trag centura înainte şi în sus;
anteductorii iau punct fix pe centura scapulară şi duc braţele înainte,
extensorii antebraţului iau punct fix pe braţ şi menţin antebraţul în
extensie; muşchii extensori ai mâinii şi degetelor iau punct fix pe
antebraţ şi menţin extensia acestor segmente.
Pricipiul nr. 5. Când un membru superior sau inferior acţionează
ca un lanţ cinematic închis, muşchii care intră în acţiune îşi i-au punct
fix pe capetele lor periferice (distale) şi acţionează asupra
segmentelor prin capetele lor centrale (proximale).
94

De exemplu: în poziţia stând cu genunchii flexaţi muşchii
extensori ai piciorului pe gamba îşi i-au punct fix pe picior, pentru a
impiedica gamba să cadă peste picior; extensorii gambei pe coapsă îşi
iau punct fix pe gambă, pentru a nu lăsa coapsa să cadă pe gambă;
extensorii coapsei pe bazin (ischio gambierii în principal) îşi iau
punct fix pe gambă pentru a împiedica căderea bazinului pe coapsă.
Principiul nr. 6. Când membrele acţionează ca lanţuri cinematice
deschise, grupele musculare agoniste (care execută mişcarea) se
contractă izotonic (prin scurtare) şi mişcarea rezultă prin apropierea
capetelor musculare de inserţie.
În aceste mişcări cu lanţuri deschise grupele musculare agoniste
i-au punct fix pe capetele proximale (centrate) şi se contractă izotonic
prin apropierea capetelor de inserţie (exp. aruncări, lansări,
loviri.etc).
Principiul nr. 7. Când membrele acţionează ca lanţuri cinematice
închise grupele musculare agoniste se contractă izotonic sau izometric
succesiv sau sub ambele forme.De exemplu din poziţia atârnat se
execută flexia braţelor.
Grupele musculare agoniste, flexorii braţului pe antebraţ şi
adductorii braţului i-au punct fix pe capetele lor periferice şi se
contractă izotonic, apropindu-şi capetele de inserţie.
Când din această poziţie de atârnat cu braţele flexate se trece
la extensia braţelor, avem o contracţie izometrică.
In această situaţie grupele musculare agoniste, extensorii
braţelor pe antebraţ şi abductorii braţelor i-au un punct fix pe capetele
lor periferice şi se contractă izometric depărtându-şi capetele de
inserţie.
95

Alergarea de viteză poate fi un exemplu de contracţie,
succesivă, în atacul solului, tricepsul sural se contractă izometric, iar
în faza următoare de extensie a piciorului (flexia plantară), tricepsul
sural se va contracta izotonic, apropiindu-şi capetele de inserţie
pentru a realiza propulsia corpului înainte prin flexia plantară.
Principiul nr.8: executarea unei mişcari este posibilă datorită
intervenţiei concomitente şi contrarii a muşchilor agonişti şi
antagonişti. Când agoniştii se contractă izotonic şi invers. Viteza de
execuţie a mişcărilor este dependentă de raportul invers proporţional
dintre intensitatea de acţiune a agoniştilor şi antagoniştilor.
De exemplu, în flexia antebraţului pe braţ agoniştii muşchilor
flexori (bicepsul brahial şi brahialul anterior) se contractă izotonic. In
acelaşi timp extensorii antebraţului pe braţ (tricepsul brahial,
anconeul, se contractă izometric).
Cu cât viteza de execuţie a flexiei antebraţului pe braţ este mai
mare, acţiunea agoniştilor este mai mare decât a antagoniştilor pe
parcursul mişcării.
Principiul nr. 9. La sfârşitul mişcării, muşchii antagonişti se
transformă în muşchi neutralizatori. Cu cât viteza de excuţie este mai
mare, cu atât intervenţia antagoniştilor la sfarşitul mişcării este mai
intensă.
Principiul nr. 10. Menţinerea poziţiei se realizează prin
echilibrarea intensităţii de acţiune a agoniştilor şi antagoniştilor şi
intrarea tuturor lanţurilor musculare în condiţii de travaliu static. De
exemplu poziţia antebraţului pe braţ la 90 grade presupune o
echilibrare a intensităţii de acţiune a flexurilor şi extensorilor
antebraţului pe braţ.
96

Principiile 8, 9, 10. Se referă la interelaţiile dintre muşchii
antagonişti şi agonişti în mişcare.
Principiul nr.11. Folosirea acţiunilor forţelor externe (în special a
forţei gravitaţionale) inversează rolul grupelor musculare.De
exemplu: genuflexiunile în faza de coborâre. Suntem tentaţi să
spunem că se realizează, de către lanţul triplei flexii a membrelor
inferioare, prin contribuţie concomitentă a flexorilor gambei pe
plantă, a flexorilor coapsei pe gambă, a flexorilor coapsei pe bazin şi
flexorilor bazinului pe coapsă. În realitate mişcarea este realizată prin
lanţul triplei extensii care depune un efort izometric şi nu lasă
segmentele membrelor inferioare, să se prăbuşească, sub influenţa
forţelor gravitaţionale.
Deşi este vorba de o mişcare de triplă flexie, agoniştii sunt
reprezentaţi de grupele musculare ale lanţului triplei extensii, iar
flexorii devin antagonişti.
Principiul nr.12. Acţiunea forţelor gravitaţionale asupra corpului,
în unele situaţii inversează rolul grupelor musculare numai după ce
acestea au început mişcarea. Aşa se întâmplă în flexia trunchiului din
poziţia stând, când muşchii flexori au iniţiat mişcarea prin contracţie
izotonică; ea este continuată şi controlată de extensori, care se
contractă izometric şi îl impiedică să se prăbuşească înainte sub
influenţa forţei gravitaţionale.
Principiul nr. 13. În cadrul acţiunilor lanţurilor cinematice
închise, pârghiile osteo-articulare, acţionează în general ca pârghii de
sprijin, deci ca pârghii de gradul I.
Principiul nr. 14. În cadrul acţiunilor lanţurilor cinematice
deschise, pârghiile osteo-articulare acţionează în general, ca pârghii
de viteză, deci ca pârghii de gradul III.
97

Principiul nr.15. Perfecţionarea se atinge prin realizarea
mişcărilor cu maximum de eficacitate, folosindu-se la minimum
forţelor interne şi la maximum forţelor externe. Astfel interpretată,
perfecţionarea exerciţiilor fizice apare ca o formă superioară, de
adaptare a organismului omenesc la mediu. Cu un bagaj de cunoştinţe
de anatomie funcţională şi biomecanică generală, orice profesor,
antrenor, modelator al corpului omenesc care va ţine cont de aceste
principii generale (enunţate mai sus) va putea face o anliză
biomecanică a mişcărilor complexe din diferite ramuri sportive în
scopul perfecţionării acestora. In capitolele ce vor urma de
biomecanică specială vom căuta să aprofundam noţiunile prezentate
în capitolele anterioare, scopul fiind acela de a oferi o bază ştiinţifică
de analiză biomecanică a poziţiilor şi mişcărilor din activitatea de
educaţie fizică.
98

PARTEA A- II- A. BIOMECANICA
SPECIALĂ
În acest capitol al biomecanicii speciale vom studia statica şi
dinamica în diferitele domenii ale activităţii motrice pe care le-am
sintetizat în:
Analiza biomecanică a principalelor poziţii ale corpului
omenesc;
Analiza biomecanică a mişcărilor locomotorii ciclice şi
aciclice.
99

CAPITOLUL VII. ANALIZA
BIOMECANICĂ A POZIŢIILOR
În practica educaţiei fizice şi a sportului, există numeroase situaţii
în care corpul în întregime sau numai segmentele sale sunt fixate în
anumite poziţii pe care trebuie să le păstreze un timp oarecare.
Poziţiile sunt puncte de plecare ale unor mişcări globale sau
parţiale.
Ele sunt foarte numeroase, însă din pnct de vedere biomecanic se
împart în patru mari categorii :
1) Poziţii cu sprijin superior (atârnat şi derivatele sale);
2) Poziţii cu sprijin inferior (stând şi derivatele sale);
3) Poziţii cu sprijin pe membrele superioare şi inferioare;
4) Poziţii cu sprijin pe tot corpul (culcat şi derivatele sale).
În analiza biomecanică a oricărei poziţii este necesar să se
ţină seama de urmatoarele elemente:
- definirea poziţiei;
- tipul de echilibru (stabil, instabil) şi baza de susţinere,
C.G.G, unghiul de stabilitate;
- pârghiile principale care acţionează în poziţia respectivă;
- unghiurile principale care se realizează între cuplurile şi
lanţurile cinematice specifice poziţiei pe care o analizăm;
- grupele şi lanţurile musculare care asigură prin activitatea
statică poziţia;
- tipurile de activitate musculară statică (fixare, consolidare,
mentinere) depusă de aceste grupe şi lanţuri musculare;
100

- aplicaţii practice; la ce foloseşte poziţia pe care o analizăm.
Sarcina principală a unei analize biomecanice corecte, este de a
descoperi care sunt cuplurile cinematice unde apar momente de rotaţie şi
care sunt grupele (sau lanţurile) musculare, care asigură prin activitatea
statică de menţinere a acestor poziţii, opunându-se forţelor care ţind să
producă rotaţia unor pârghii osoase. Ţinând seama de aceste date vom
prezenta în continuare analiza biomecanică, a unor poziţii de bază şi
câteva variante ale acestora.
7.1. Analiza biomecanică a poziţiilor cu sprijin superior
Poziţiile cu sprijin superior sunt toate poziţiile corpului în care
C.G.G se găseşte sub punctul de sprijin. Spre exemplu poziţiile atârnat la
bară fixă sau la inele şi derivatele acestei poziţii (atârnat prin tracţiunela
în braţe la bară) (fig. 52, 53)
Fig.52. Poziţia atârnat la bară fixă
101

Fig.53. Lanţurile musculare care asigură
a-poziţia atârnat (vedere ventrală); b-poziţia atârnat (vedere dorsală);
c-tracţiunea la bară;
7.1.1. Poziţia atârnat
Poziţia atârnat (simplu) este principala poziţie cu sprijin superior.
Corpul este atârnat prin membrele superioare la aparate fixe (bară) sau
mobilă (inele) şi poate fi comparat cu un pendul care oscilează sub
acţiunea forţelor externe. Corpul poate să fie atârnat pasiv sau activ, în
funcţie de gradul de dezvoltare a musculaturii persoanei care o execută.
Mâinile prind obiectul, iar membrele superioare, trunchiul şi
membrele inferioare sunt extinse.
C.G.G. se află între D12-LI în mijlocul trunchiului situaţie în
care echilibrul corpului este stabil, iar baza de susţinere este reprezentată
de suprafeţele palmare ale mâinilor.
102

Atunci când corpul atârnă pasiv, capul este coborât între umerii
care sunt ridicaţi; scapulele se departează mult de coloana vertebrală şi
sunt în bascula laterală iar curburile coloanei vertebrale sunt şterse.
Aceasta este poziţia începătorilor cu musculatura membrului superior
slab dezvoltată.
7.1.2. Poziţia atârnată activ
Poziţia atârnată activ se caracterizează printr-un efort static
puternic al musculaturii centurii scapulare, în care claviculele sunt
aproape orizontale, scapula în basculă medială; capul nu este coborât
între umeri şi curbura lombară este accentuată.
Poziţia este asigurată în principal de muşchii prehensori,
musculatura centurii scapulare a membrului superior şi poate fi realizată
numai de sportivi. Lanţurile musculare ale corpului considerate global
depun o activitate statică de consolidare, opunându-se distensiei
articulaţiilor. Muşchii flexorii ai degetelor (care execută prehensiunea)
precum şi muşchii basculei mediale depun o activitate statică de
menţinere pe fondul general de consolidare.
Intreaga musculatură îşi inversează punctele de sprijin. Astfel
capatul fix al muşchilor ce asigură prehensiunea va fi cel distal iar
capătul proximal al acestor muşchi vor trage în sus segmentele corpului
(astfel dinţatul mare, fasciculele inferioare ale trapezului bazinului şi în
special dorsalul mare trag trunchiul în sus, iar brachialul anterior şi
bicepsul brahial trag de braţ. Ceilalţi muşchi deltoidul, coraco-brahialul,
supraspinosul, subspinosul, subscapularul, rotundul mare, rotundul mic,
pectoralul mare trag de centura scapulară. Forţa acestor muşchi va fi cu
103

atât mai mare cu cât distanţa dintre punctele de sprijin va fi mai mică,
mai precis cu cât membrele superioare sunt mai apropiate între ele.
Acest lucru se explică prin faptul că forţa musculară se
descompune în două componente, una varticală şi alta orizontală, iar
rezultanta lor are o valoare mai mare (când membrele superioare sunt mai
apropiate între ele) ceea ce înseamnă că forţa musculaturii se
întrebuinţează aproape în întregime pentru ridicare şi nu se pierde decât o
mică parte care corespunde componentei orizontale.
Subliniem încă o dată că poziţia corectă în atârnat care se
realizează prin efortul musculaturii, descrise mai sus este numai atunci
când claviculele sunt orizontalizate şi marginile interne ale omoplaţilor se
apropie de coloana vertebrală.
Pentru asigurarea poziţiei atârnat lanţurile musculare ale corpului
depun o activitate statică care este mai intensă în apropierea sprijinului şi
descreşte spre extremitatea opusă a corpului.
Din poziţia atârnat se pot executa mişcări de tracţiune la bară fixă
pentru antrenarea musculaturii membrului superior.
7.1.3. Poziţia atârnat echer
Poziţia atârnat echer (fig.54) constă într-o flexie în unghi drept a
coapselor pe bazin. În poziţia atârnat la bară fixă, fondul general al
activităţii musculare statice este de consolidare. Pe acest fond pentru
asigurarea echerului, o serie de grupe musculare depun activitate statică
de menţinere întrucât ele se opun momentelor de rotaţie care tind să
basculeze bazinul înapoi şi să producă extensia coapsei. Aceste grupe
musculare sunt:
104

Fig.54. Poziţia atârnat echer şi lanţurile musculare care asigură efortul static
- pentru a împiedica extensia coapselor şi revenirea la poziţia
atârnat simplu (fără echer) unde acţionează grupa flexorilor coapsei pe
bazin; iar pentru a asigura extensia genunchilor şi flexia plantară
acţionează extensorii gambei şi flexorii plantari.
Întregind noţiunile de mai sus se poate spune că din grupele
musculare arătate mai sus, se constituie un lanţ muscular format din:
muşchii pereţilor abdominali, flexorii coapsei pe bazin, extensorii gambei
şi flexorii plantari care în poziţia de atârnat echer depun o activitate
statică de menţinere.
Rostul descoperirii şi precizării grupelor şi lanţurilor musculare
care în cadrul poziţiei de atârnat echer depun o activitate musculară
statică de «menţinere» este de a putea să le creştem calităţile motrice
prin metode adecvate.
105

În acest scop se vor folosi exerciţii şi aparate unde aplicând efort
static sau dinamic, putem obţine creşterea acestor calităţi ale lanţurilor
musculare care lucrează prin efort de menţinere.
Este cunoscut faptul că în orice ramură sau probă sportivă pe
lângă activitatea globală, multilaterală a musculaturii corpului există
anumite grupe şi lanţuri musculare, care depun un efort hotărâtor,
specific, cum ar fi spre exemplu în aruncarea greutăţii, suliţei, ciocanului,
lovitura de atac la volei, şutul la fotbal, lovitura de la 7m la handbal şi
altele.
Cunoscând aprofundat activitatea musculară în diferite poziţii
precum şi lanţurile musculare care depun efort de menţinere se pot folosi
aceste poziţii, pentru ca printr-o metodă corespunzatoare de antrenament
să putem creşte cu precădere calităţile motrice de bază: forţa, rezistenţa,
viteza, tocmai la grupele şi lanţurile musculare cele mai eficiente în
proba sportivă respectivă.
Un exemplu ne poate arăta concret importanţa cunoaşterii
grupelor şi lanţurilor musculare care în anumite poziţii depun activitate
statică de menţinere, întrucât aceste poziţii pot fi folosite în
antrenamentul sportiv pentru creşterea calităţii motrice de forţă şi
rezistanţă. Astfel poziţia atârnat la bară cu coatele în flexie este
asigurată prin efortul static de menţinere, de un lanţ muscular format din
flexorii degetelor şi ai carpului, flexorii cotului, retroductorii şi adductorii
în articulaţia scapulo-humerală, coborâtorii şi muşchii care basculează
medial scapula. Acest lanţ muscular este acela care asigură efortul
specific în mişcarea de «tracţiune» din canotajul academic sau mişcarea
de progresiune la înot.
Cunoscând acestea în metodica antrenamentului pentru canotaj şi
înot pe lângă alte metode se poate folosi şi poziţia atârnat la bară cu
106

coatele flectate care prin efort static poate contribui eficient la creşterea
calităţilor motrice de forţă şi rezistenţă, tocmai la grupele şi lanţurile
musculare care ne interesează.
Mai subliniem înca o dată căci în analiza biomecanică a oricarei
alte poziţii este esenţială cunoaşterea poziţiei C.G.G. a corpului şi a
segmentelor sale. În funcţie de sediul acestora se determină tipul de
echilibru şi legat de acesta se precizează şi tipul de activitate musculară
statică.
Esenţial este că pe fondul general de activitate statică de
«consolidare» depusă în poziţia cu sprijin superior, să descoperim
grupele şi lanţurile musculare care depun efort static de «mentinere».
Acest tip de activitate statică se găseşte la un număr mai mare sau mai
mic de grupe musculare după cum este şi poziţia.
Astfel, în poziţia atârnat la bară fixă, activitate statică de
menţinere depune numai grupele musculare ale flexorilor degetelor şi
muşchii care coboară şi basculează medial scapula.
În alte poziţii cu sprijin superior, cum ar fi « atârnat planşa înainte
sau înapoi la paralele sau inele», numărul grupelor musculare care depun
efort static de menţinere este mult mai mare, chiar le depăşeşte pe acelea
care depun efort static de consolidare. In aceste poziţii corpul este întins
orizontal, trunchiul este în extensie, iar membrele superioare fixate pe
inele, fac un unghi de 45–50 grade în raport cu axa corpului.
Corpul are tendinţa să devină vertical din cauza momentelor
forţelor care i-au naştere şi pe care trebuie să le anihileze musculatura
corpului prin efortul static de menţinere.
În poziţia planşe înainte la inele, activitatea statică de menţinere
este îndeplinită de un lanţ muscular care este format din flexorii plantari,
extensorii genunchilor, flexorii coapsei pe bazin, muşchii pereţilor
107

abdominali ai şanţurilor vertebrale, retroductorii în articulaţia scapulo–
humerală, muşchii basculei mediale şi deplasatorii dorso– mediali ai
centurii scapulare şi flexorii degetelor şi carpului.
Din aceste exemple rezultă că numărul grupelor musculare care
depun efort static de menţinere în condiţiile unor poziţii atârnat variază
de la poziţie la poziţie şi este în funcţie de numărul şi importanţa
momentelor de rotaţie care apar şi împotriva cărora musculatura corpului
trebuie să intervină ca să le anuleze.
7.1.4. Poziţiile cu sprijinul la aparate
Poziţiile cu sprijinul la aparate (paralele, inele, bară fixă, fig. 52-
54) sunt poziţii de tip mixt deoarece prezintă elemente de sprijin şi
atârnat. În aceste poziţii corpul este sprijinit prin membrele superioare de
un punct de sprijin oarecare; membrele superioare sunt în adducţie şi
extensie pe lângă trunchi.
Între segmentele corpului sunt relaţii de echilibru diferite. Astfel
dacă ne referim la sprijinul la nivelul mâinilor care apucă barele
(paralele) corpul se află în echilibru instabil (C.G.G. fiind deasupra
suprafeţelor de sprijin aproximativ între L1-L2).
Corpul în această poziţie are şi un al doilea sprijin, la nivelul
articulaţiilor scapulo–humerale, faţă de care se află în echilibru stabil
(C.G.G fiind dedesubtul articulaţiilor scapulo–humerale).
Efortul muscular static care se depune pentru asigurarea acestor
poziţii este mai intens ca în toate poziţiile atârnat la nivelul centurii
scapulare şi a membrelor superioare. Un rol esenţial revine muşchilor
abductori ai braţului, dorsalul mare, pectoralul mare, dinţatul mare,
subscapularul, rotundul mare şi rotundul mic, care menţin poziţia.
108

7.1.5. Poziţia sprijin lateral la inele
Poziţia sprijin lateral la inele la inele (cruce) este una dintre cele
mai dificile, întrucât cere din partea membrelor superioare şi a centurii
scapulare un efort static considerabil de menţinere a greutăţii întregului
corp în condiţiile «unui sprijin mobil » (inele) (fig. 55).
Fig.55. Sprijin lateral la inele
Membrele superioare sunt în abducţie la 90 grade şi trebuie să
asigure poziţia, învingând greutatea corpului care tinde să coboare.
Momentele forţelor de rotaţie acţionează cu putere maximă la
nivelul articulaţiilor scapulo–humerale şi solicită foarte puternic grupa
muşchilor adductori ai braţului, coborâtorii şi muşchii care basculează
109

medial scapula. Aceştea toţi depun un efort puternic static de menţinere
de aceea ei trebuie să aibă o forţă mare.
Cunoaşterea acestor grupe musculare ne dă posibilitatea să
intervenim în procesul de pregătire al gimnaştilor printr-un antrenament
special de creştere a forţei.
În concluzie, poziţiile cu sprijin superior contribuie la dezvoltarea
calităţilor motrice (în principal forţa) al musculaturii centurii scapulare, a
membrelor superioare şi a muşchilor pereţilor abdominali, influenţează
pozitiv ţinuta individului şi contribuie la corectarea curburilor anormale
ale coloanei vertebrale.
7.2. Poziţii cu sprijin inferior
Poziţiile cu sprijin inferior, sunt toate poziţiile în care C.G.G se
găseşte deasupra sprijinului, exemplul clasic, este poziţia stând vertical.
Pe lângă aceasta, există numeroase poziţii derivate, C.G.G fiind deasupra
sprijinului, echilibrul corpului este instabil, iar tipul predominant de
activitate musculară statică este de fixare (echilibrare). Pentru aceasta
colaborează toate lanţurile musculare antagoniste, astfel la membrul
inferior de sprijin, echilibrarea este asigurată prin participarea simultană
a patru lanţuri musculare: tripla extensie, tripla flexie şi doua lanţuri
laterale: pronatorii labei piciorului cu abductorii coapsei şi supinatorii
labei piciorului cu aductorii coapsei pe bazin.
Pe acest fond general de activitate statică de echilibrare, se
adaugă pentru unele grupe sau lanţuri musculare şi o activitate statică de
menţinere (în cazul când apar momente de rotaţie pe care trebuie să le
anuleze).
110

7.2.1. Poziţia stând
Poziţia stând (fig. 56) este poziţia iniţială din exerciţiile fizice, în
care corpul omului se află în poziţie, verticală cu plantele sprijinite de
sol.
Fig.56 (a, b.) Poziţia stând normal şi lanţurile musculare care o asigură
a-vedere laterală şi b-vedere ventrală
După gradul de înclinare a corpului faţă de verticală se descriu
trei variante ale poziţiei stând:
- normală;
- forţată;
- comodă.
7.2.2. Poziţia stând normală
În poziţia stând normală, verticala C.G.G, cade în mijlocul bazei
de susţinere puţin ventral faţă de linia care uneşte articulaţiile
111

talocrurale. Centrele de greutate ale diferitelor segmente ale corpului se
găsesc în general pe acelaşi plan frontal care coincide cu axa verticală a
corpului.
Segmentele corpului nu sunt situate unele faţă de celelalte, exact
pe aceeaşi linie verticală, ci formează între ele unghiuri cu diferite
deschideri ceea ce necesită un efort muscular pentru menţinerea lor.
Astfel axa generală a corpului este verticală, a gâtului îndreptată dorsal, a
regiunii toraco-lombare îndreptată ventral, apoi din nou dorsal (în
regiunea lombară inferioară).
Greutatea creşte pe măsură ce coborâm de la cap spre extremităţi
repartizându-se în mod egal pe cele două membre inferioare care au o
poziţie verticală, făcând cu planta un unghi de 90 (grade).
Unghiul de înclinare a bazinului este de 60–65 (grade), vârfurile
picioarelor sunt îndepartate formând un unghi de 65–70 (grade).
Membrele superioare atârnă liber în jos, iar umerii sunt uşor traşi înapoi
(uşoară deplasare dorso–medială a scapulei).
În poziţia stând normală, verticala C.G.G. trece prin corpul
vertebrelor C5–C6 ale T9–T10 şi dorsal faţă de vertebrele mijlocii
lombare. Ea întretaie la mijloc linia ce uneşte la mijloc articulaţiile coxo-
femurale, trece ventral faţă de articulaţia, genunchiului şi prin capul
astragalului.
CGG al capului este situat ventral faţă de verticala C.G.G. al
corpului ca şi faţă de articulaţia atlantooccipitală. Pentru menţinerea
capului în poziţie orizontală este necesar un efort al musculaturii cefei
mai mic ca valoare decât greutatea capului ce necesită a fi echilibrată;
aceasta se explica prin faptul că la pârghia de gradul I ce se realizează la
acest nivel, braţul forţei este mai mare decât braţul rezistenţei, distanţa de
112

la originea muşchilor cefei şi articulaţia atlantooccipitală este mai mare
decât distanţa dintre această articulaţie şi centrul de greutate al capului.
În regiunea cervicală braţul forţei fiind ceva mai mic decât braţul
rezistenţei, forţa necesară contracţiei statice a muşchilor extensori este
mai mare decât la cap.
În regiunea toracală braţul forţei este de câteva ori mai mic decât
braţul rezistenţei. Muşchii extensori ai coloanei vertebrale trebuie să
menţină întreaga greutate a toracelui, care este situat ventral faţă de
punctul de sprijin al pârghiei.
De aceea activitatea statică a muşchilor respectivi pentru
menţinerea echilibrului la nivelul regiunii toracice este de câteva ori mai
mare decât greutatea toracelui.
In regiunea lombară verticala C.G.G. trece dorsal faţă de
corpurile vertebrelor, braţul forţei este şi mai mic, ceea ce necesită un
efort considerabil pentru menţinerea echilibrului trunchiului. Astfel se
explică dezvoltarea foarte mare a masei musculare lombare comparativ
cu muşchii ventrali ai abdomenului.
Datorită inegalităţii braţelor pârghiei muşchii regiunii lombare
care mobilizează braţul scurt trebuie să corespundă ca volum şi forţă
pentru a putea echilibra greutatea trunchiului ce tinde să cadă înainte.
La nivelul articulaţiei coxofemurale echilibrul se asigură de către
grupele musculare antagoniste ventrale şi dorsale cu predominenţa
extensorilor–care sunt foarte dezvoltaţi la om pentru a menţine poziţia
verticală a corpului.
La genunchi–verticala C.G.G trece ventral, iar corpul are tendinţa
să se încline înainte. Genunchii sunt blocaţi în extensie de grupele
musculare antagoniste extensoare şi flexoare cu participarea tractului
ilio–tibial şi a ligamentelor încrucişate ale articulaţiei genunchilui.
113

Tendinţa de a cădea înainte este oprită de muşchii ischiogambieri
care trag de tuberozitatea ischionului şi împiedică astfel înclinarea
bazinului în faţă.
În articulaţia talocrurală echilibrarea se face de către muşchii
flexori şi dorsali ai labei piciorului. Deoarece verticala C.G.G trece
ventral de axa articulaţiei prin capul astragalului, corpul are tendinţa să
cadă înainte. De aceea muşchii flexori plantari sunt mai dezvoltaţi decât
cei dorsali, pentru că ei se opun căderii.
Asupra acestei articulaţii se mai exercită şi forţe care tind să
dezechilibreze corpul în sens lateral; menţinerea echilibrului se asigură
prin contribuţia celor două grupe musculare antagoniste care execută
pronaţia şi supinaţia în articulaţiile infratalare.
7.2.3. Poziţia stând forţat
În poziţia stând forţat, corpul este mult aplecat înainte, bărbia
flectată, curbura toracică stearsă, curbura lombară accentuată, iar
înclinarea bazinului crescută, membrele superioare în uşoară retroducţie,
C.G.G este deplasat înainte. Verticala lui trece mai în faţă decât în poziţia
stând normală, ea ajungând către marginea anterioară a bazei de
susţinere. Corpul are tendinţa să cadă înainte, poziţia este menţinută de
efortul musculaturii şanţurilor vertebrale, precum şi de grupul muscular
al triplei extensii de la membrele inferioare. Contracţia puternică a
musculaturii produce o oboseală rapidă şi nu poate fi menţinută
îndelungat. Muşchii şanţurilor vertebrale şi muşchii triplei extensii depun
o activitate musculară de menţinere şi de fixare a antagoniştilor; sunt
solicitate în special grupele musculare ventrale ale gâtului, muşchii
114

pereţilor abdominali şi ischiogambierii, respiraţia este îngreunată prin
blocarea cutiei toracice şi a contracţiei muşchilor abdominali.
7.2.4. Poziţia stând comodă
În poziţia stând comodă sau poziţia de odihnă, de repaus corpul
este uşor înclinat înapoi, C.G.G este împins dorsal, iar verticala să cadă
în mijlocul bazei de susţinere. Capul este uşor aplecat înainte, curbura
toracică crescută, iar cea lomabară micşorată.
Membrele superioare atârnă liber dea lungul corpului, iar
membrele inferioare sunt mai depărtate, unul din ele fiind deplasat
lateral; sprijinul se face pe ambele membre inferioare, însă greutatea
corpului nu se repartizează egal, fiind mai mare pe unul din ele. Către
acesta se produce şi o uşoară înclinare laterală a bazinului.
Corpul are tendinţa să cadă înapoi iar pentru menţinerea
echilibrului şi împiedicarea căderii este nevoie de aportul musculaturii
ventrale. Aceasta acţionează cu braţe de pârghii mai lungi pentru care
necesită consum energetic mic. În celelalte poziţii descrise faţă de poziţia
comodă, muşchii triplei extensii aveau o contribuţie crescută; în poziţia
comodă, diferenţa scade şi tinde să se egalizeze solicitând mai mult lanţul
triplei flexii pentru blocarea, fixarea articulaţiei respective. Din analiza
acestor poziţii rezultă că oscilaţiile verticalei C.G.G înainte sau înapoi
determină schimbări ale volumului activităţii statice depuse de lanţurile
musculare pentru asigurarea poziţiei corpului. Activităţile statice de
menţinere care solicită cel mai mare consum de energie în asigurarea
poziţiei statice, este mai intensă în poziţia normală şi atinge maximum în
poziţia forţată, pe când în poziţia comodă scade.
115

7.2.5. Poziţia stând pe vârfuri
Poziţia stând pe vârfuri, poziţie rar folosită, întreaga greutate a
corpului se sprijină pe capetele metatarsienelor şi pe degete, iar verticala
C.G.G cade către partea ventrală a bazei de susţinere mult diminuată.
Echilibrul corpului este greu de menţinut şi solicită mult grupele
musculare ale triplei extensii (în special flexorii plantari), precum şi
grupele musculare ale pronaţiei şi supinaţiei labei piciorului, care asigură
echilibrul corpului în sens lateral. Este o poziţie foarte obositoare şi nu
poate fi menţinută mult timp chiar după antrenament îndelungat
(balerini).
7.2.6. Poziţiile stând asimetrice
Poziţiile stând asimetrice sunt acelea în care greutatea corpului nu
se distribuie în mod egal pe ambele membre inferioare.
Piciorul de sprijin suportă majoritatea greutăţii corpului iar
celalalt numai o parte.
Bazinul este înclinat în partea piciorului de sprijin din necesitatea
de a aduce verticala C.G.G cât mai aproape de centrul bazei de susţinere.
Coloana vertebrală capată curburi compensatorii în plan frontal pentru a
realiza o repartiţie corespunzatoare a masei corpului faţă de verticala
C.G.G uşurând astfel munca musculaturii.
Poziţia corpului variază în funcţie de modul în care se ţine
greutatea. Corpul omului care poartă greutate formează un tot, iar C.G.G
se stabileşte în comun pentru corp şi greutate (fig.57)
116

Fig.57. Proiecţia C.G.G în funcţie de modul în care se poartă o greutate
Cu cât obiectul purtat are o greutate mai mică cu atât deplasarea
C.G.G va fi mai redusă. Dacă greutatea este sprijinită la nivelul pieptului
C.G.G se deplasează mai sus iar greutatea ţinută aproape de sol coboară
C.G.G. pentru menţinerea echilibrului corpul se apleacă în general în
direcţia opusă părţii în care se ţine greutatea.
Mărirea amplitudinii mişcărilor compensatorii depinde de
greutatea ridicată. Acest principiu se foloseşte în gimnastica medicală
colectivă pentru ameliorarea unor deviaţii scheletice prin purtarea unor
greutăţi pe cap pentru a-l obliga să-şi îndrepte curbura coloanei
vertebrale toracice.
7.2.7. Poziţia stând cu piciorul ridicat înainte
Poziţia stând cu piciorul ridicat înainte–este o poziţie cu sprijin pe
un singur membru inferior, ea solicită mai intens musculatura care
asigură poziţia corpului în întregime şi anume grupele musculare ale
triplei flexii şi triplei extensii ale membrului inferior de sprijin.
117

Trunchiul este menţinut la verticală de muşchii şanţurilor
vertebrale. Pentru asigurarea poziţiei flectate a celuilalt membru inferior
flexorii coapsei pe bazin şi extensorii gambei depun o activitate de
menţinere, care se prelungeşte în sus spre peretele abdominal a cărui
musculatură ventrală este contractată spre a împiedica înclinarea
bazinului.
Baza de susţinere este redusă la conturul piciorului de sprijin, iar
unghiul de stabilitate micşorat prin mişcarea concomitentă a C.G.G a
corpului (prin ridicarea membrelor inferioare în urma flexiei coapsei
C.G.G suferă o ascensiune) astfel echilibrul corpului este dificitar, corpul
are tendinţa să cadă spre partea fără sprijin. Prin flexia coapsei pe bazin
odată cu ridicarea C.G.G, are loc şi deplasarea ventrală a acestuia; în
consecinţă corpul are tendinţa să cadă înainte fapt ce nu se întâmplă
pentru că intervin o serie de mişcări compensatorii. Astfel contracţia
ischiogambierilor produce înclinarea dorsală a bazinului şi accentuarea
curburii lombare în poziţia membrelor inferioare de spr în înclinarea
dorsală a bazinului prin contracţia ischiogambierilor care sunt şi flexori
ai gambei, pozţia membrelor inferioare de sprijin va fi menţinută mai
bine dacă se face şi o uşoară flexie a genunchilor.
7.2.8. Poziţia stând cu piciorul ridicat înapoi
Amplitudinea ei în articulaţia coxofemurală este de 10 – 15 grade.
Poziţia este asigurată de înclinarea ventrală a bazinului şi a întregului
corp, pentru a-i mări amplitudinea. Poziţia este asigurată de extensorii
coapsei, care depun o activitate de menţinere în timp ce muşchii peretelui
abdominali şi flexorii coapsei pe bazin sunt întinşi.
118

7.2.9. Poziţia cumpănă cu braţele lateral
Greutatea corpului se sprijină pe unul din membrul inferior blocat
în extensie la nivelul articulaţiei genunchilui. Corpul şi membrul inferior
liber sunt orizontale, iar membrele superioare extinse lateral. Corpul are
tendinţa să cadă în faţă deoarece C.G.G este mult deplasat înainte.
Acestei situaţii i se opun muşchii triplei extensii de la piciorul de sprijin
prin efortul de menţinere. Corpul şi membrele inferioare libere sunt fixate
în extensie, formând un arc uşor cu concavitatea în sus. Poziţia laterală a
membrelor superioare contribuie la păstrarea echilibrului în plan frontal
greu de menţinut numai prin contracţia muşchilor gambieri, care execută
pronaţia şi supinaţia labei piciorului.
7.2.10. Poziţia de flexie ventrală a trunchiului
In poziţia de flexie ventrală a trunchiului (fig 58).
Fig.58. Poziţia stând cu trunchiul flectat înainte şi lanţurile musculare care asigură
această poziţie
119

C.G.G este deplasat înainte iar corpul are tendinţa să cadă înainte,
bazinul este înclinat ventral şi împins înapoi, iar când flexia trunchiului
se accentuează este necesar să se facă o uşoara flexie a genunchilor
pentru a micşora gradul de întindere pasivă a ischiogambierilor.
Flexia ventrală a trunchiului se produce prin imbinarea
activităţilor de învingere a muşchilor pereţilor abdominali cu activitatea
de cedare a muşchilor şanţurilor vertebrale, poziţia flectată se asigură
prin activităţi statice de fixare a lanţurilor triplei flexii şi extensii cu
predominarea triplei extensii.
7.2.11. Poziţia stând cu genunchii flexaţi
Poziţia stând cu genunchii flexaţi-poate fi menţinută în sprijin pe
toată planta sau numai pe vârful picioarelor C.G.G deşi se află mai jos,
echilibrul se menţine greu din cauza dimensiunilor mici ale sprijinului.
Verticala C.G.G trece ventral faţă de articulaţia coxofemurală dorsal faţă
de articulaţia genunchilor şi întretaie axa ce uneşte cele două articulaţii
talocrulale. Membrele superioare pot ajuta echilibrarea corpului în plan
frontal prin ducerea lor laterală. Muşchii şanţurilor vertebrale şi ai triplei
extensii depun un efort static de menţinere, iar restul musculaturii depune
efort de fixare. Poziţia este greu de menţinut pentru că se produce o
îngreuiere a circulaţiei.Ea se foloseşte la coborare pe schi şi hochei.
7.2.12. Poziţia în genunchi
Stabilitatea acesteia este mai mare decât a poziţiei stând întrucât
baza de susţinere a corpului este mult mărită. Este de forma unui
120

patrulater cuprins între cele două rotule şi vârfurile picioarelor-unghiul de
stabilitate este crescut şi C.G.G apropiat de suprafaţa de sprijin.
C.G.G este coborât, ceea ce determină şi o mărire a unghiului de
stabilitate. Întrucât verticala C.G.G a corpului cade spre limita anterioară
a bazei de susţinere, echilibrul este mai greu de asigurat către înainte.
Aceasta solicită muşchii şanturilor vertebrale şi a extensorilor coapsei pe
bazin în asigurarea poziţiei.
Bazinul este mai înclinat decât în poziţia stând pubisul fiind
coborât iar curbura lombară accentuată.
7.2.13. Poziţia şezând pe un suport cu picioarele în sprijin pe sol
Este o poziţie mai odihnitoare decât cele descrise anterior. Baza
de susţinere este mai mare, C.G.G este coborât, iar unghiul de stabilitate
mare.
Verticala C.G.G cade către limita dorsală a bazei de susţinere
ceea ce determină un mai mare grad de stabilitate în planul ventral, decât
în cel dorsal.
Bazinul este puţin înclinat apropiat de orizontală, pubisul ridicat
şi curbura lombară aproape ştearsa.
7.3. Poziţii cu sprijin pe membrele superioare şi inferioare
Sunt acele poziţii în care sprijinul se face atât pe membrele
inferioare cât şi pe cele superioare. Deosebim astfel numeroase poziţii,
dar cele mai caracteristice sunt :
- poziţia în sprijin culcat anterior;
- poziţia în sprijin culcat posterior;
121

- podul;
- poziţia stând pe mâini;
7.3.1. Poziţia în sprijin culcat anterior
Sprijinirea corpului se face pe palme şi pe vârful picioarelor– faţa
fiind orientată cu privirea în jos, capul, coloana vertebrală, bazinul şi
membrele inferioare sunt în poziţia asemanatoare cu poziţia stând.
Occipitalul, spatele, fesele, gambele şi călcâiele sunt pe aceeaşi linie
dreaptă. Membrele superioare sunt în extensie la cot, iar centura
scapulară în uşoara retroducţie (fig.59).
Fig.59. Poziţia culcat în sprijin anterior şi lanţurile musclare care asigură aceasta poziţie
Muşchii care asigură această poziţie sunt flexorii degetelor care
fac priza pe sol, extensorii cotului, retroductorii în articulaţia scapulo-
humerală, muşchii anteductori şi basculatori laterali ai scapulei,
opunându-se deplasării dorso-mediale a scapulei şi alunecării în jos a
toracelui.
La trunchi muşchii peretelui abdominal se opun extensiei
exagerate a coloanei vertebrale, iar poziţia membrelor inferioare este
122

asigurată de contribuţia simultană a lanţurilor musculare, a triplei extensii
şi triplei flexii cu predominanţa extensiei. În general activitatea statică
depusă de musculatura corpului este de menţinere, efortul cel mai mare
revenind musculaturii membrelor superioare inclusiv centurii scapulare.
7.3.2. Poziţia în sprijin culcat posterior
Constă în sprijinirea corpului aflat cu faţa în sus pe membrele
superioare şi călcâie: (fig 60).
Fig.60. Poziţia culcat în sprijin posterior şi lanţurile musulare care asigură această
poziţie
Corpul sub influenţa gravitaţiei tinde să se încline pe sol; el este
menţinut rectiliniu prin contracţia statică a extensorilor coapsei pe bazin,
a muşchilor peretelui abdominal cu colaborarea antagoniştilor.
La membrele superioare efectul de «menţinere« a flexorilor
degetelor care fac priza pe sol extensorii cotului, retroductorii în
articulaţia scapulo-humerală şi muşchii care fac bascula medială a
scapulei şi grupele musculare antagoniste contribuie la fixarea poziţiei
corecte a membrelor superioare. La trunchi muşchii şanţurilor
vertetebrale, iar muşchii pereţilor abdominali se opun basculării bazinului
şi apropierii lui de sol.
123

La membrele inferioare poziţia este menţinută prin contracţie
statică a grupelor antagoniste cu predominarea extensorilor coapsei pe
bazin, a extensorilor genunchiului şi flexorilor dorsali ai labei piciorului.
Aceste două poziţii în sprijin (culcat anterior şi posterior) solicită mai
ales musculatura membrelor superioare şi nu pot fi executate decât de
persoane viguroase. Din aceste poziţii se pot face o serie de exerciţii
pentru întărirea musculaturii membrelor superioare, înclusiv al centurii
scapulare. Aceste poziţii pot fi considerate ca exerciţii pregătitoare pentru
sprijinul la aparate, podul şi poziţia stând pe mâini, în care întreaga
greutate a corpului trebuie menţinută de membrele superioare.
7.3.3. Podul
Podul este o poziţie complicată în care greutatea corpului se
repartizează pe membrele superioare şi inferioare, trunchiul fiind în
extensie puternică în formă de arc de cerc, fiind foarte solicitate
elasticitatea ligamentelor şi mobilitatea articulaţiilor (ale coloanei
vertebrale). Podul este o poziţie care îngreuiază respiraţia şi circulaţia şi
solicitş un efort muscular puternic (fig. 61).
Fig. 61. Podul. Repartiţia forţei de greutate asupra membrelor în funcţie de valoarea
unghiului format între C.G.G. şi locurile de sprijin pe sol
124

Această poziţie se poate executa din poziţia stând normală sau din
stând pe mâini şi se va menţine cu atât mai bine cu cât verticala C.G.G
va fi păstrată cât mai aproape de limitele bazei de susţinere.
Un rol esenţial îl au muşchii şanţurilor vertebrale, extensorii
coapsei pe bazin precum şi muşchii retroductori în articulaţia scapulo-
humerală deplasatorii ventro mediali ai centurii scapulare şi flexori ai
degetelor.
7.3.4. Poziţia stând pe mâini
Fig.62. I-Poziţia stând pe mâini; săgeţile indică acţiunea forţei de greutate
asupra segmentelor corpului; II-Lanţurile musulare care asigură poziţia stând pe mâini: a) vedere din profil;
b) vedere din spate
Poziţia stând pe mâini (fig 62) este una dintre cele mai greu de
realizat poziţii a corpului. Corpul se află în echilibru înstabil, baza de
susţinere este redusă la circumferinţa contactului cu solul. Menţinerea
echilibrului necesită o complicată coordonare nervoasă, în plus centura
125

scapulară şi masa musculară a membrelor superioare sunt mult mai puţin
dezvoltate decât centura pelviană şi membrele inferioare.
Scheletul şi musculatura membrelor superioare nu sunt adaptate
pentru funcţia de susţinere, iar scheletul mâinii nu are o arhitectura
similară bolţii plantare, care să permită suportul de greutăţi mari.
Membrele superioare menţin greutatea corpului prin capetele humerale
aflate în elevaţie şi prin centura scapulară unde rolul cel mai important îl
au muşchii ce excută bascula medială, care se opun prăbuşirii corpului.
La cot acţionează prin activitatea statică de fixare a grupelor musculare
antagoniste cu predominarea extensorilor, la articulaţia carpului, flexorii
şi extensorii blochează articulaţia şi flexorii degetelor se contractă
energic şi asigură fixarea pe sol.
Verticala C.G.G, întretaie axa transversală a umerilor, deltoizii şi
pectoralii mari contribuie la asigurarea echilibrului în plan sagital făcând
oficiul pe care-l fac fesierii şi ileopsoasul pentru poziţia stând.
7.4. Poziţii cu sprijin pe întreg corpul (culcat)
Aceste poziţii sunt denumite poziţii clinostatice sau de decubit.
Corpul poate fi întins pe spate (decubit dorsal) pe faţă (decubit
ventral) sau pe o parte (decubit lateral). Axa lungă a corpului este
paralelă cu solul, membrele inferioare fiind întinse iar membrele
superioare sunt întinse deasemenea pe lângă corp.
Poziţia culcat este cea mai favorabilă pentru odihnă. Suprafaţa de
sprijin a corpului culcat pe o saltea moale este maximă iar C.G.G al
corpului este foarte aproape de baza de susţinere deci unghiul de
stabilitate este foarte mare. Dacă suprafaţa de sprijin pe care este culcat
corpul, în decubit dorsal este dură, tare (podea), suprafaţa de contact este
126

mai mică, fiind reprezentată de regiunea occipitală, dorsală superioară,
fese şi călcâie. Dacă corpul este culcat în decubit ventral contactul se
face pe partea inferioară a feţei anterioare a toracelui pe spinele iliace
antero- superioare, pe faţa anterioară a şoldurilor, coapselor genunchilor
şi pe faţa dorsală a picioarelor.
În culcat lateral membrul superior poate fi flectat sub cap sau
întins deasupra capului. Contactul se face pe faţa posterioară a
membrului superior, pe partea laterală a feţei laterale a toracelui şi
marginea laterală a omoplatului, faţa externă a marelui trohanter, faţa
externă a coapsei, gambei şi a marginei externe a plantei.
În pozitia culcat cu genunchii întinşi, bazinul este mult înclinat,
ceea ce determină o întindere a muşchilor pereţilor abdominali, care
crează difilcutăţi de respiraţie; în situaţia în care genunchii şi coapsele
sunt flectate, întinderea dispare iar poziţia este mai comodă. Totuşi
poziţia culcat din gimnastică nu este o poziţie de repaus. Intervin o serie
de muşchi asemanatori cu cei din poziţia stând. Astfel coloana vertebrală
se blochează menţinându-şi curburile fiziologice, printr-o contracţie
musculară generalizată, cu membrele inferioare şi superioare în extensie.
Poziţia culcat este o poziţie initială pentru o serie de exerciţii–flexia pe
bazin a membrelor inferioare întinse şi flexia trunchiului. Aceste exerciţii
se folosesc pentru întărirea muşchilor pereţilor abdominali.
În concluzie la analiza biomecanică a poziţiilor cu sprijin inferior
se poate menţiona că efortul static principal pentru asigurarea lor este de
fixare, (echilibrare) fiind vorba de un echilibru instabil. Pe acest fond
general de activitate statică se adaugă efortul static de menţinere pentru
unele grupe şi lanţuri musculare. Cunoaşterea acestora este esenţială în
metodica antrenamentului sportiv.
127

CAPITOLUL VIII. ANALIZA BIOMECANICĂ A
MIŞCĂRILOR
Mişcările corpului omenesc şi ale segmentelor sale, precum şi
deplasarea lor în spaţiu stau la baza întregului proces de educaţie fizică şi
sport. Corpul omului poate efectua fie mişcări parţiale cu membrele sau
segmentele sale (capul, trunchiul) fie mişcări globale, care deplasează
corpul în întregime.
Biomecanic mişcările pot fi de translaţie (mers, alergare, ciclism,
înot, căţărare, etc) sau de rotaţie (gigantica la bară, rotaţii la aparate,
mişcări de rotaţie ale membrelor şi coloanei vertebrale).
Mişcările sunt comandate voluntar sau automat de către sistemul
nervos central (S.N.C) şi efectuate de muşchii somatici care mobilizează
pârghiile osoase articulate.
În mobilizarea corpurilor şi lanţurilor cinematice, musculatura
corpului depune o activitate dinamică cu două particularităţi principale :
a) activitatea de învingere sau concentrică în care muşchii se
contractă şi produc mişcarea prin scurtare; apropie două sau mai multe
pârghii osoase (flexia cotului, a coapsei, gambei, trunchiului, etc).
b) activitatea de cedare sau excentrică în care musculatura asigură
mişcarea prin alungire (cedarea treptată a contracţiei); pârghiile osoase se
depărtează.
Ceea ce este esenţial în biomecanica mişcărilor este faptul că
aceeaşi grupă musculară poate produce mişcări atât prin scurtare
(învingere), cât şi prin cedarea scurtării. Astfel flexorii cotului produc
prin activitatea de învingere, mişcarea de flexie, iar prin activitatea de
cedare mişcarea de extensie.
128

Acest lucru este valabil pentru orice grupă musculară somatică.
De aceea în înţelesul mai larg biomecanic, activitatea musculară şi
împărţirea sa în grupe de flexori, extensori, rotatori, devine îngustă şi nu
este capabilă să explice aprofundat esenţa, geneza şi asigurarea
mişcărilor.
În analiza biomecanică a mişcărilor nu este suficient să vorbim
numai de grupe sau lanţuri musculare care produc flexia, extensia, ci
trebuie să precizăm obligatoriu şi ce tip de activitate dinamică depun (de
învingere sau de cedare).
Pentru a înţelege mai bine sensul biomecanic, al analizei unei
miscări vom da două exemple caracteristice pregătirii sportive :
a) tracţiunile la bară;
b) genuflexiile.
a). Tracţiunile la bară se folosesc atât în pregătirea unor sportivi
pentru creşterea forţei musculare, precum şi ca normă de control pentru
evaluarea gradului de pregatire fizică.
La o analiză sumară ar părea că tracţiunea la bară dezvoltă global
musculatura membrelor superioare (inclusiv a centurii scapulare).
Analiza biomecanică a acestei mişcări arată că nu este aşa. Prin
tracţiunea la bară se dezvoltă numai o parte a musculaturii membrelor
superioare şi anume: flexorii degetelor, ai carpului şi cotului,
retroductorii şi adductorii în articulaţia scapulo-humerală, muşchii care
cobară şi cei care basculează medial scapula. Motivul constă tocmai în
înţelegerea esenţei activităţii de învingere şi cedare a musculaturii.
Astfel, mişcarea de tracţiune la bară are doi timpi: 1-de ridicare; 2- de
coborâre.
În efortul de ridicare a trunchiului acţionează lanţul muscular
prin activitatea de învingere. Restul muşchilor membrelor superioare nu
129

sunt antrenaţi decât în calitate de antagonişti şi în consecinţă calităţile lor
motrice nu se dezvoltă. În faza a doua de coborâre acelaşi lanţ muscular
depune activitate dinamică prin efortul de cedare. Deci prin acest
exerciţiu nu se antrenează efectiv decât numai grupele şi lanţurile
musculare descrise.
b). Genuflexia. Cu sau fără halteră genuflexiunile se folosesc ca
exerciţii pentru creşterea forţei musculare a membrelor inferioare. În
relitate ele nu dezvoltă decât calităţile motrice ale lanţului triplei extensii
care asigură atât lăsarea în jos (prin activitatea de cedare) cât şi ridicarea
(prin activitatea de învingere). Restul lanţurilor musculare ale membrelor
inferioare nu sunt antrenate, decât foarte puâin în acest exerciţiu.
De aceea în analiza biomecanică a oricărei mişcări trebuie
precizat pe lângă grupa sau lanţul muscular care efectuează mişcarea şi
tipul de activitate musculară (de învingere sau de cedare).
De altfel, analiza biomecanică a mişcărilor este mai complexă şi
comportă obligatoriu următoarele operaţii:
a). definiţia mişcării pe care o analizam;
b). precizarea perioadelor, fazelor şi momentelor caracteristice
mişcării.
c). analiza forţelor externe care intervin pe parcursul mişcărilor:
gravitaţia, reacţia reazemului;
d). precizarea grupelor şi lanţurilor care asigură mişcarea pe faze;
întrucât pe parcursul mişcării, grupele şi lanţurile musculare se shimbă la
fiecare din fazele sau momentele sale;
e) precizarea tipului de activitate musculară pe faze;
f). precizarea axelor, unghiurilor şi a vitezelor unghiulare;
g). aplicaţii la activitatea de educaţie fizică şi sport pentru
formularea unor indicaţii metodice privind pregătirea fizică. Aplicaţiile
130

practice trebuie să constituie sinteza oricărei analize, altfel eficienţa sa
este nulă.
Diversele exerciţii şi aparate folosite pentru pregătirea fizică
generală şi specială trebuie analizate prin prisma grupelor şi lanţurilor
musculare pe care le solicită. În cazul când ele solicită aceleaşi grupe şi
lanţuri musculare care sunt hotărâtoare într-o probă sportivă oarecare este
obligatoriu să analizam dacă şi tipul de activitate musculară, pe faze este
cel din proba respectivă. În cazul când nu este acelaşi se impune
corectarea şi îmbunătăţirea metodicii antrenamentului prin introducerea
unor exerciţii sau aparate care să solicite musculatura corespunzătoare cu
tipul de activitate musculară din proba respectivă.
De aceea orice analiză biomecanică este necesara să fie
completată cu indicaţii metodice privind îmbunătăţirea antrenamentului
pentru pregătirea fizică generală sau specială.
8.1. Mişcările locomotorii
Sunt acea categorie de mişcări care antrenează deplasarea
corpului în întregime, ele sunt efectuate de musculatura corpului care
învingând forţa de gravitaţie, prin presiunea pe sol (sau aparate)
determină deplasarea C.G.G al corpului. Aceasta descrie traiectorii
rectilinii, ondulate sau paralele.
Din punct de vedere biomecanic mişcările locomotorii se împart în:
a). ciclice: mersul, alergare, înotul, căţărarea, ciclismul, etc;
b). aciclice: săriturile, aruncările.
Mişcările locomotorii ciclice se caracterizează prin repetarea unor
cicluri asemănătoare de faze. Astfel mersul are o serie de faze care se
repetă succesiv.
131

Mişcările locomotorii aciclice se compun dintr-un număr de faze
după care mişcarea încetează. Astfel săriturile sau aruncările au un număr
de faze, după care mişcarea încetează.
Orice mişcare complexă poate fi împărţită în mişcări mai simple
care constituie perioade (exemplu: perioada piciorului de sprijin pe sol î
n mers), faze (faza de amortizare sau impulsie în mers, bătaia la
sărituri), sau momente (momentul verticalei la mers, momentul
desprinderii la sărituri).
8.2. Analiza biomecanică a mişcărilor locomotorii ciclice
8.2.1. Mersul
Mersul este o mişcare locomotorie ciclică care se asigură la om şi
la animale cu cel mai mic consum energetic datorită faptului că este o
acţiune automată.
Caracteristica principală a mersului care-l deosebeşte de toate
celelalte mişcări locomotorii este că se păstrează pe tot parcursul fazelor,
contactul cu solul fiind fie cu un picior (sprijin unilateral), fie cu ambele
(sprijin bilateral).
Mersul se compune dintro succesiune de paşi. După Marey pasul
reprezintă totalitatea mişcărilor care se execută între două poziţii
asemănătoare ale aceluiaşi picior. Acesta este pasul dublu, fiind
considerat unitatea funcţională a mersului. El se descompune în doi paşi
simpli, două perioade, fiecare la rândul său având câte trei faze.
Pasul dublu se descompune în două perioade: (figura 63,).
a) a) perioada piciorului de sprijin ;
b) perioada piciorului oscilant.
132

PICIORUL DE SPRIJIN PICIORUL OSCILANT
Fig.63. Analiza biomecanică a mersului:1. faza de amortizare; 2. momentul verticalei; 3.
impulsia; 4. balans posterior; 5. momentul verticalei; 6. balans posterior
La rândul sau fiecare perioada cuprinde câte trei faze astfel :
a) perioada piciorului de sprijin cuprinde:
1. faza de amortizare (contactul cu solul);
2. momentul verticalei (trecere la verticală);
3. faza de impulsie (împingerea de la sol) ;
b) perioada piciorului oscilant cuprinde:
1. faza pasului posterior (oscilaţia sau balansul
posterior);
2. momentul verticalei;
3. faza pasului anterior (oscilaţia sau balansul anterior).
Pe parcursul acestor şase faze, contactul cu solul se păstrează
permanent cu următoarele particularităţi: 4/5 din timp sprijinul este
unilateral, iar 1/5 din timp sprijinul este pe ambele membre inferioare.
133

În timpul mersului C.G.G al corpului descrie o traiectorie
ondulată întrucât se produc oscilaţii verticale şi transversale.
Oscilaţiile verticale se datoresc modalităţii contactului cu solul;
astfel în perioada de sprijin unilateral în momentul verticalei C.G.G are
cea mai mare înălţime, iar în sprijinul bilateral are poziţia cea mai joasă.
Oscilaţiile laterale ale C.G.G se datoresc necesităţii păstrării echilibrului
corpului în condiţiile sprijinului unilateral; musculatura corpului produce
mişcări compensatorii, înclinarea bazinului pe piciorul de sprijin.
Amplitudinea maximă a oscilaţiilor laterale este în momentul verticalei
piciorului de sprijin.
Din punct de vedere biomecanic, faza de amortizare este o fază
negativă care frânează viteza mersului, întrucât forţa reacţiei reazemului
este îndreptată contrar direcţiei mersului.
Faza de impulsie, o fază pozitivă care accelerează viteza mersului,
întrucât reacţia reazemului are aceeaşi direcţie cu deplasarea. În timpul
perioadei de sprijin unilateral membrele inferioare care asigură sprijinul
pe sol acţionează în articulaţia talocrurală ca o pârghie antrenând la
extremitatea sa liberă bazinul şi întregul trunchi.
În timpul perioadei de oscilaţie, membrul inferior liber oscilează în
articulaţia coxofemurală asigurând ducerea înainte a piciorului.
Analiza musculară. Musculatura membrelor inferioare depune
efortul principal în mers; restul musculaturii trunchiului şi membrelor
acţionează în cadrul coordonării generale a mersului şi produc o serie de
oscilaţii ale bazinului, umerilor şi membrelor, de regulă în sens invers
decât mişcarea membrelor inferioare.
134

Fig.64. Analiza musculara a mersului.
1-extensori gamba; 2-flexori dorsali; 3-flexori gamba;
4-flexori plantari; 5-flexori coapsa;
6-extensori coapsa.
Faza de amortizare este asigurată la atingerea solului cu călcâiul
de un lanţ muscular format de flexorii coapsei pe bazin, extensorii
genunchiului şi flexorii dorsali ai labei piciorului, activitatea este de
cedare şi asigură derularea lină a piciorului pe sol.
Momentul verticalei piciorului de sprijin este asigurat de
contribuţia simultană a lanţului triplei extensii şi triplei flexii ca lanţuri
musculare principale ale membrului inferior de sprijin.
Faza de impulsie este asigurată de contribuţia puternică a lanţului
triplei extensii prin activitate de « învingere ».
135

Faza pasului posterior se asigură prin contracţia uşoară a lanţului
triplei flexii a piciorului oscilant; ea determină oscilaţia înainte în
articulaţia coxofemurală, uşoara flexie a genuchiului şi flexia dorsală a
labei piciorului. Prin aceasta se scurtează lungimea piciorului oscilant
pentru a nu atinge solul la trecerea pe la verticală.
Momentul verticalei piciorului oscilant este asigurat de
contribuţia uşoară a celor două lanţuri musculare principale, cu
predominenţa triplei flexii.
Faza pasului anterior se asigură prin contribuţia unui lanţ
muscular format de flexorii coapsei, extensorii genunchiului şi flexorii
dorsali ai labei piciorului, prin activitatea de învingere care pregăteşte
membrele inferioare pentru aterizare.
8.2.2. Alergarea
Este o mişcare locomotorie ciclică care se deosebeşte de mers
printr-o fază de zbor care înlocuieşte sprijinul bilateral din mers. Această
fază se interpune între cele două perioade de sprijin şi oscilaţie. Unitatea
biomecanică a alergării este tot pasul dublu şi cuprinde aceleaşi faze cu
mersul, având în plus o faza de zbor (fig.65). În timpul alergării C.G.G a
corpului oscilează în direcţie verticală, laterală şi sagitală spre deosebire
de mers unde C.G.G atinge cea mai mare înălţime în momentul verticalei
piciorului de sprijin, în alergare, cea mai mare înălţime este atinsă la
mijlocul zborului; cu cât viteza de alergare este mai mare cu atât
oscilalţiile C.G.G sunt mai mari. Oscilaţiile laterale ating maximum în
timpul sprijinului coincid cu înălţimea minimă a C.G.G cu minimum de
viteză orizontală a masei corpului.
136

Fig. 65. Fazele alergării: a) amortizarea; b) momentul verticalei; c, d) impulsia; e, f, g, h, j, k, l, m) zborul; n) amortizarea. Pe parcursul fazelor de la d până la m se desfăşoară
fazele piciorului oscilant
Persoanele cu bazinul larg şi membrele inferioare scurte întampina
ca şi femeile, greutăţi în alergare din cauza amplitudinii crescute a
oscilaţiilor laterale. În alergare trunchiul efectuează mişcări de torsiune
mai mari decât în mers; ele îşi micsorează amplitudinea pe măsura ce
viteza alergării creşte.
Mişcările de torsiune ale umerilor sunt inverse faţă de mişcările
bazinului şi pot ajunge până la 45 (grade) la mijlocul fazei de zbor.
Oscilaţia membrelor superioare se face cu coatele în flexie pentu
a micşora momentul inerţiei şi a nu frâna viteza de alergare.
Rolul oscilaţiilor trunchiului, umerilor, bazinului şi membrelor
superioare în alergare se poate demonstra prin alergarea cu mâinile legate
la spate, care jenează complexul de mişcări ajutatoare şi constituie prin
aceasta o frână.
137

Caracteristicile pasului în alergare. Lungimea pasului în alergare
este mai mare decât în mers, iar durata sa în timp este mai scurtă.
Lungimea pasului în alergare nu depinde numai de lungimea membrelor
inferioare cum este la mers, ci şi de lungimea traiectoriei, zborului, de
lungimea labei piciorului şi de completa sa derulare pe sol. De aceea,
încălţămintea alergatorului este bine să fie mai lungă şi să se elimine
orice factor care ar reduce derularea piciorului.
Viteza alergării se măreşte odată cu creşterea cadenţei şi tinde
către un maximum care este aproximativ 10 m/sec.
Presiunea verticală a piciorului pe sol este cu atât mai mare cu
cât viteza alergării creşte; presiunea tangenţială a piciorului pe sol este
negativă în faza de amortizare şi constituie o frână pentru viteza de
alergare; după momentul verticalei piciorului de sprijin, presiunea
tangenţială devine pozitivă şi valoarea sa creşte proporţional cu viteza
alergării.
Particularităţile biomecanice ale alergatorului de viteză şi
rezistenţă. Alergătorii sunt de talie mijlocie cu greutate între 65 – 75 kg
paniculul adipos slab dezvoltat, iar masa musculara a membrelor
inferioare mai dezvoltate decât a trunchiului şi membrelor superioare. La
membrele inferioare sunt dezvoltate lanţul triplei extensii dar nu excesiv
în comparaţie cu antagoniştii lor.
Analiza musculară. În faza de amortizare când se ia contact cu
solul, lanţul muscular al triplei extensii se opune flexiei segmentelor
lăsându-se întinşi ca nişte resorturi, îndeplinind astfel o activitate de
«cedare». După luarea contactului cu solul acest lanţ muscular îşi
schimbă activitatea cu una dinamică «de învingere» care se intensifică
treptat pe tot parcursul perioadei de sprijin unilateral, pentru a atinge
maximum în faza de impulsie (fig. 66).
138

Fig. 66. Alergarea. Lanţurile musculare care asigură startul şi oprirea;
N- Presiunea normală; T- Presiunea tangenţială
În momentul verticalei piciorului de sprijin pentru un timp scurt,
cele două lanţuri musculare antagoniste ale membrelor inferioare depun o
activitate statică de fixare, asigurând prin efortul lor simultan poziţia
verticală a corpului. În acest moment genunchiul nu este complet întins
(ca în mers); din această cauză lanţul triplei extensii (şi în principal
extensorii genunchiului depun o activitate mai mare decât lanţul triplei
flexii).
În toate fazele piciorului de sprijin lanţul muscular al triplei extensii
este motorul principal; el depune o activitate dinamică de învingere, care
creşte progresiv şi asigură desprinderea de sol.
În timpul zborului cele două membre inferioare depun activităţi
musculare deosebite, cel care a efectuat impulsia se pregăteşte să
efectueze fazele piciorului oscilant, relaxând lanţul triplei extensii spre a
lăsa liberă oscilaţia înainte; membrul inferior care asigură fazele
oscilaţiei se pregăteşte să ia contact cu solul, prin intrarea în tensiune a
lanţului triplei extensii care să asigure amortizarea.
În faza pasului posterior, membrul inferior care a făcut impulsia
devine oscilant şi pendulează cu genunchiul uşor flexat până la verticală.
139

Această pendulare se face cu două forţe şi anume: gravitaţia care
produce o accelerare către înainte a piciorului oscilant şi forţa de
contracţie a lanţului muscular a triplei flexii; aceasta din urma intervine
cu atât mai puternic cu cât viteza alergării este mai mare, gravitaţia
nemaiputând să asigure proiecţia piciorului oscilant din cauza timpului
tot mai scurt în care trebuie să se petreacă această fază. De aceea la
alergătorii de viteza este important să se urmărească în paralel cu
creşterea calităţilor motrice ale lanţului muscular al triplei extensii şi a
calităţilor motrice ale lanţului muscular al triplei flexii.
În momentul verticalei piciorului oscilant, pentru un timp
foarte scurt, cele două lanţuri musculare antagoniste depun o activitate
statică de consolidare asigurând prin efortul lor combinat poziţia la
verticală a piciorului oscilant. Este de remarcat că tripla flexie imprimă
membrelor inferioare scurtarea necesară prin flexia genunchiului şi flexia
dorsală a labei piciorului. În faza pasului anterior a piciorului oscilant,
proiecţia viguroasă înainte este asigurată de lanţul muscular al triplei
flexii, unde efortul principal este asigurat de flexorii coapsei pe bazin.
Contribuţia acestei grupe musculare este cu atât mai însemnată cu cât
viteza de alergare este mai mare.
8.3. Analiza biomecanică a mişcărilor locomotorii aciclice
8.3.1. Săriturile
Săriturile sunt mişcări locomotorii care se caracterizează printr-
un zbor prelungit în care timp corpul descrie în aer o parabolă. Traectoria
în aer depinde de mai mulţi factori: scopul săriturii (în lungime, înalţime,
cu prajina), viteza iniţiala şi unghiul de desprindere.
140

Clasificarea săriturilor după traiectorie: (fig. 67A)
Fig.67. A- Traiectoria diferitelor tipuri de sărituri: a) în lungime; b) în înălţime;
c) pe înălţime; d) în adâncime;
a) săritura în lungime cu traiectorie joasă;
b) săritura în înălţime cu triectorie înaltă;
c) săritura pe înălţime (pe un obstacol) cu traiectorie ascendentă;
d) săritură în adâncime (de pe un obstacol) cu traiectorie descendentă.
După tehnica execuţiilor săriturile sunt simple (lungime, înălţime) şi cu
sprijin (cu prajina, la cal).
Particularităţile biomecanice ale săriturilor. Biomecanic
săriturile pot fi descompuse în patru faze: pregătirea, desprinderea
(bătaia), zborul şi aterizarea. Aceste faze sunt legate între ele şi se
condiţionează reciproc; fiecare fază are particularităţile sale.
1. Faza de pregătire diferă după cum săritura este de pe loc sau cu
elan.
La săritura de pe loc se fac o serie de mişcări cu trunchiul şi cu
membrele constituind avântarea; mişcările constau dintr-o succesiune de
141

coborâri şi ridicări ale C.G.G asociate cu mişcări conjugate ale
membrelor superioare şi uşoara aplecare a trunchiului înainte.
Mişcările membrelor inferioare au drept scop punerea în
«tensiune optimă» a lanţului muscular al triplei extensii şi stabilirea unui
«unghi optim de flexie» la nivelul articulaţiilor membrelor inferioare de
bătaie, unghi de la care să se declanşeze contracţia balistică pentru
desprinderea de pe sol. Aplecarea trunchiului înainte are drept scop
punerea C.G.G pe direcţia impusului piciorului de bătaie, în cazul când
acesta nu se realizează, apar momente de rotaţie care scad eficacitatea
săriturii.
La săriturile cu elan, pregătirea se face prin alergare, care
imprimă corpului o viteză orizontală care contribuie la alungirea
traiectoriei.
2. Faza de bătaie (desprinderea) constă din contracţia balistică
puternică a lanţului triplei extensii de la membrele inferioare de bătaie.
Pentru că eficienţa acestei contracţii să fie maximă Hochmuth a arătat că
este necesară «o coordonare a impulsurilor parţiale», adică să fie o
succesiune corespunzatoare a contracţiilor grupelor musculare care
efectuează bătaia. Când această coordonare nu există cum se întâmplă la
copii sau la sportivii supra antrenaţi, la nivelul pârghiilor formate de
coapsă, gambă şi laba piciorului apar forţe de frânare, pentru invingerea
cărora se va cheltui o parte din forţa de contracţie a muşchiului care
efectuează impulsia de la sol.
Viteza iniţială este asigurată la săritura de pe loc numai la
contracţia musculaturii (tripla extensie), pe când la săritura cu elan viteza
iniţiala se compune din viteza orizontală a elanului şi din contracţia
lanţului triplei extensii de la membrul inferior de bătaie. În acest caz,
traiectoria este rezultanta acestor forţe care acţionează asupra C.G.G.
142

Unghiul de impulsie este unghiul format de orizontala solului cu
direcţia impulsului musculaturii care efectueaza bătaia.
Unghiul de desprindere este format de orizontala solului cu
direcţia traiectoriei la începutul zborului. Acest unghi este totdeauna mai
mic decât cel de impulsie, întrucât elanul prin viteza sa orizontală
micşorează unghiul de desprindere.
B-Unghiul de desprindere în sărituri
De aceea la săritura de pe loc unghiul de desprindere se apropie
de 45 de grade, pe când la săriturile cu elan el este mai mic; valoarea sa
este cu atât mai scăzută cu cât viteza elanului este mai mare.
La săritura în înălţime unghiul de desprindere este mai mare de
45 de grade fără să depăsească 65- 70 de grade.
3. Faza de zbor este constituită din traiectoria în aer a corpului; ea
începe în momentul desprinderii şi durează până la aterizare. Traiectoria
C.G.G este o parabolă, care în prima parte este ascendentă uniform
încetinită, iar în a doua parte este descendentă având o viteză uniform
143

accelerată. În timpul zborului curenţii de aer frânează viteza, care atinge
valori considerabile la săriturile cu schiul. Forţele interne ale corpului nu
influienţeaza traiectoria C.G.G însă asigură pe timpul zborului o poziţie
convenabilă trunchiului şi membrelor în vederea trecerii obstacolului sau
pregătindu–le pentru aterizare.
În faza de zbor musculatura corpului se relaxează la săritorii
experimentaţi şi rămâne contractată la începători.
4. Faza de aterizare constă în amortizarea vitezei corpului prin
contactul cu solul; aterizarea se face în diferite moduri, în funcţie de stilul
săriturii. Amortizarea se face printr-o serie de forţe, de frânare dintre
care cea mai importantă este contracţia «de cedare» a musculaturii, în
special a membrelor inferioare. La frânarea vitezei zborului mai
contribuie rezistenţa şi elasticitatea ţesuturilor şi articulaţiilor, precum şi
calităţile solului (sol afânat, nisip, burete din material plastic).
Amortizarea începe din momentul contactului cu solul şi ţine până la
anularea totală a vitezei.
Analiza musculară. Principala forţă musculară care imprimă
eficienţa săriturii este lanţul muscular al triplei extensii la membrele
inferioare de bătaie. Înainte de declanşarea contracţiei de învingere a
acestui lanţ muscular se produce o uşoară flexie în articulaţia membrelor
inferioare cu scopul de a creea condiţii biomecanice optime. Prin
flectarea articulaţiei muşchii extensori sunt întinşi, intră în stare de
tensiune şi în momentul contracţiei vor realiza un lucru mecanic mai
mare (lungirea scurtării este mai mare în condiţiile în care muşchiul este
în prealabil întins). Prin flectare se urmăreşte realizarea unui unghi optim
de flexie de la care se poate declanşa extensia cu cea mai mare
eficacitate. Acest unghi de flexie variază de la individ la individ şi este în
funcţie de lungimea pârghiilor osoase ale membrelor inferioare de bătaie
144

şi de masele parţiale ale segmentelor corpului. Determinarea unghiului
optim de flexie se realizează prin filmarea unor sărituri cu peste 300
imagini pe secundă.
În concluzie, la analiza musculară se poate arăta că principalul
motor al săriturii este lanţul triplei extensii. Este deosebit de important să
arătăm că activitatea acestui lanţ prin efortul muscular este «de
învingere» la bătaie şi «de cedare» la aterizare. De aceea toţi sportivii
trebuie să aibă antrenat acest lanţ, atât pentru efortul de învingere cât şi
pentru efortul de cedare. În ansamblul metodicii antrenamentului trebuie
prevăzute complexe de exerciţii şi aparate, care să solicite în ambele
sensuri aceste lanţuri musculare.
8.3.1.1. Săritura în lungime cu elan
Traiectoria săriturii este o parabolă lină; unghiul de desprindere este
mai mic decât 1/2 din unghiul de impulsie, atingând în cazurile marilor
performanţe 20–25 de grade. În timpul elanului corpul este înclinat
înainte, de obicei mai mult decât la alergările de viteză (fig. 68).
Fig. 68. Analiza schematică a fazelor săriturii în lungime cu elan:
1) elanul; 2) bătaia; 3, 3’, 3” zborul; 4) aterizarea
145

Bătaia se face pe un singur picior, motiv pentru care lungimea
traiectoriei este determinată în mai mare măsură de viteza elanului decât
de forţa de impulsie.
În timpul zborului există mai multe tehnici ca: ghemuit, cu paşi
în aer şi altele, care tind să realizeze atât alungirea traiectoriei, cât şi o
aterizare cât mai bună.
Amortizarea se face pe ambele membre inferioare, care iau
contactul cu solul prin călcâie, având flectate puternic articulaţiile
genunchilor şi coxofemurale.
Principala sursă de frânare o constituie contracţia «de cedare» a
lanţului muscular al triplei extensii, care transformă lanţul cinematic al
membrelor inferioare într-un resort elastic şi se opune accentuării flexiei.
Aterizarea la săritura în lungime pune numeroase probleme de
coordonare neuro-musculară. Astfel dacă membrele inferioare sunt duse
prea mult înainte, iar viteza săriturii este mică, aterizarea este ratată,
corpul câzând înapoi. Din contră dacă ducerea membrelor inferioare
înainte este mai puţin accentuată, iar viteza este mai mare, corpul cade
înainte.
Pentru realizarea unor mari performanţe este absolut necesar
să se realizeze o viteză orizontală cât mai mare, iar membrele inferioare
să fie duse mai înainte. Înerţia corpului va asigura continuarea
traiectoriei C.G.G şi după luarea contactului cu solul, reuşind să asigure
astfel condiţii optime pentru aterizare.
La începători acest lucru nu este posibil, de aceea ducerea
înainte a membrelor inferioare va fi cu atât mai mare cu cât se poate
realiza o viteza cât mai mare.
146

8.3.1.2. Săritura în înalţime
Traiectoria este o parabolă înaltă, unghiul de desprindere este mai
mare de 45 de grade şi atinge în cadrul unor performanţe mari valoarea
de 65–75 grade. La aceste sărituri elanul joacă un rol mai redus, forţa
principală fiind contracţia musculaturii piciorului de bătaie. Pentru ca
ştacheta să nu fie atinsă, este necesar să se ţină seama nu numai de
traiectoria C.G.G, ci şi de poziţia în spaţiu a diferitelor segmente ale
trunchiului şi membrelor, acestea trebuie să fie cât mai mult grupate în
jurul C.G.G, altfel riscă să atingă stacheta.
Esenţialul este că traiectoriile diferitelor părţi ale corpului să se
apropie cât mai mult de traiectoria C.G.G.În timpul zborului există mai
multe tehnici de atacare a ştachetei: prin ghemuire, prin păşire
(foarfeca), prin rostogolire ventrală, rostogolire dorsală (Mexico 1968).
Se pare că tehnica prin rostogolire dorsală creează condiţii optime care
elimina riscul atingerii ştachetei de către membre în timpul zborului
(Fig.69).
Aterizarea nu pune probleme biomecanice deosebite deoarece
terenul pe care se face amortizarea este acoperit cu material elastic.
O problemă esenţială a tehnicii săriturii în înălţime o constituie
analiza biomecanică comparativă a contribuţiei celor două membre
inferioare la realizarea traiectoriei C.G.G.
Se cunoaşte rolul piciorului de bătaie care prin lanţul triplei
extensii este un factor hotarător în realizarea înălţimii traiectoriei.
Ducerea viguroasă înainte şi în sus a piciorului de atac are drept
consecinţă ridicarea C.G.G. şi deplasarea lui către înainte, acţiune de
mare împortanţă pentru realizarea în bune condiţii a trecerii peste
ştachetă.
147

Fig. 69. Diferite procedee de sărituri în înălţime:
A-prin ghemuire; B-prin păşire (foarfeca); C-prin rostogolire ventrală; 1) elanul; 2) bătaia; 3, 3’, 3”- zborul; 4 aterizarea
Analiza comparativă a musculaturii arată că la membrele
inferioare cele două lanţuri musculare care intervin nu sunt identice,
astfel dacă la piciorul de bătaie intervine lanţul triplei extensii, la
piciorul de atac acţionează un lanţ muscular format din flexorii capsei de
bazin, extensorii genunchiului şi flexorii dorsali ai plantei.
Concluzia care se desprinde indică necesitatea unui antrenament
diferenţiat pentru cele două lanţuri musculare, dacă vrem să obţinem
performanţe înalte.
Exerciţii care sunt bune pentru creşterea calităţii motrice la
piciorul de bătaie nu sunt bune pentru piciorul de atac şi invers.
148

De aceea pentru a îmbunătăţi metodica antrenamentului săriturilor
în înălţime este necesar să ţinem seama şi de acest fapt.
8.3.1.3. Săritura cu prăjina
Este o săritura cu sprijin mobil; întreg sistemul prajină-săritor
poate fi comparat cu o pendulă care oscilează în jurul punctului fix de pe
sol.
Traiectoria C.G.G. nu mai este o parabolă; în prima parte a
săriturii, sportivul execută mişcări active care determină schimbarea
poziţiei sale faţă de prajină din atârnat în stând pe mâini.
Săritura cu prăjina se bazează pe energia cinetică dezvoltată de
elan, combinată cu forţa de impulsie a bătăii, care imprimă corpului o
mişcare de pendulare pe prajină şi se continuă apoi cu o tragere şi
ridicare a corpului deasupra nivelului de apucare a prajinei. (fig.70)
Fig. 70. Lanţurile musculare care asigură săritura cu prăjina
149

Elanul se caracterizează printr-o alergare accelerată care are drept
scop imprimarea unei viteze lineare cât mai mari.
Bătaia - se produce pe piciorul stâng odată cu ridicarea prăjinei
deasupra capului şi este asigurată de lanţul triplei extensii.
După fixarea prăjinei pe sol, aceasta începe să penduleze, iar
corpul săritorului se află atârnat; iniţial atârnarea este pasivă
producându-se faza pendulului lung, care începe imediat după părăsirea
solului şi ţine până în momentul în care picioarele au depăşit prăjina.
Mişcarea din cadrul pendulului lung se efectuează prin energia cinetică a
elanului, punctul de rotaţie fiind la nivelul prizei cu mâinile.
Urmează faza pendulului scurt care constă din ansamblul
mişcărilor de tragere şi răsturnare a trunchiului. Efortul musculaturii
corpului accelerează elanul căpătat prin pendulul lung.
Lanţurile musculare ventrale ale corpului acţionează viguros,
scurtând faza de rotaţie şi ca urmare favorizează acceleraţia prin
mişcarea momentului inerţial, C.G.G. se ridică, iar capul şi umerii
basculează în jos.
Tracţiunea, întoarcerea şi împingerea sunt fazele următoare. Ca
urmare a pendulului scurt, trunchiul este răsturnat, iar picioarele sunt
ridicate în sus.
Tragerea se face în braţe şi are rolul de a prelungi mişcarea de
ridicare a C.G.G. imprimandu-i o accelerare bruscă; ea începe în
momentul în care bazinul a depăşit nivelul prizei mâinilor şi nivelul
umerilor. Odată cu tragerea în braţe se produce şi o înşurubare în spirală
a corpului. În continuare are loc o mişcare de împingere în braţe care
ridică şi mai sus corpul şi printr-o mişcare de rotire trece peste ştachetă.
Împingerea În braţe este asigurată prin efortul muscular de
învingere de către lanţul muscular format din flexorii degetelor,
150

extensorii cotului anteductorii în articulaîia scapulo humarală, ridicătorii
şi muşchii care basculează lateral scapula.
Eliberarea prăjinii şi trecerea peste stachetă se face după un
ultim impuls dat de membrele superioare pe prajină, după care o
eliberează; corpul trece peste stachetă descriind un arc de cerc, de regulă
cu faţa în jos.
Când se folosesc prăjini de material plastic elasticitatea acestora
măreşte valoarea impulsului musculaturii corpului; totodată ele permit şi
o priză mai înaltă (peste 4,25m).
Săritura cu prajina pune probleme complexe în pregătirea sportivilor
întrucât solicită numeroase grupe şi lanţuri musculare, atât de la trunchi
cât şi de la membrele superioare şi inferioare. Cunoaşterea acestora
permite o mai bună orientare în metodica antrenamentului săriturilor cu
prăjina.
8.3.2. Analiza biomecanică a aruncărilor
Aruncările sunt probe atletice care pot fi impărţite după modalitatea în
care forţa aruncătorului este aplicată în mişcarea obiectului. Astfel
putem avea: împingeri (greutate), azvârliri (suliţă), lansări (disc,
ciocan). În toate aruncările centrul de greutate al obiectului descrie în
timpul zborului o traiectorie curbă asemănătoare unei parabole. Factorii
care determină lungimea unei aruncări sunt :
- viteza iniţială (V0) cu care obiectul părăseşte mâna;
- unghiul de lansare şi unghiul de teren;
- suprafaţa frontală opusă aerului de către obiectul aflat în zbor.
Viteza iniţială este cel mai important factor care determină
lungimea aruncării, deoarece în ecuaţia care determină distanţa de
aruncare, viteza intră prin pătratul ei:
151

X= Vo² x sin² α / G unde:
X = lungimea aruncării; Vo = viteza iniţială a obiectului; unghiul α =
unghiul de lansare şi G = acceleraţia gravitaţiei
Viteza este rezultatul mai multor forţe care se aplică obiectului şi
anume: viteza orizontală sau circulară a elanului şi contracţia
musculaturii corpului. Este necesar ca toate aceste forţe să acţioneze
coordonat, pentru ca efectul lor să se însumeze; în caz contrar rezultă
forţe care se anulează sau franează şi scurtează lungimea traiectoriei.
În efortul de aruncare, atletul trebuie să-şi ingreuneze întreaga
masă musculară şi nu numai forţa braţelor, ci şi pe cea a trunchiului şi
membrelor inferiare. De aceea forţa rezultantă este proporţională cu
numărul grupelor musculare angrenate în mişcare. Un alt factor mecanic
care are mare importanţă în creşterea vitezei este timpul cât acţionează
forţa asupra obiectului de aruncat. Cu cât aceasta acţionează un timp mai
îndelungat, cu atât energia cinetică este mai importantă, iar viteza este
mai mare.
În fine, un alt factor mecanic care condiţionează creşterea vitezei
este intensitatea forţei aplicată obiectului. Deci cu cât forţa contracţiei
musculare va fi mai mare cu atât şi viteza imprimată obiectului de
aruncat va fi mai mare.
Se poate concluziona că viteza iniţială va fi maximă atunci când
forţele arătate acţionează simultan pe tot parcursul, pe aceeaşi direcţie şi
trec prin centrul de greutate al obiectului. Viteza iniţială va fi redusă
dacă forţele acţionează succesiv şi fiecare numai pe o fracţiune de
parcurs.
Corpul omenesc, prin constituţia sa, nu permite să se realizeze în
mod ideal o acţiune simultană a forţelor pe întregul parcurs. De aceea
din punct de vedere biomecanic este mai bine ca forţele să intre în
152

acţiune în ordinea descrescandă a intensităţii lor, iar forţele mai mari să
acţioneze pe o fracţiune de parcurs mai lungă.
Concluzia practică care se impune este că la aruncări, mişcarea
odată începută, trebuie să se execute în mod continuu până la terminarea
ei. Este necesar de asemenea ca mişcarea să fie efectuată cu o viteza
treptat crescândă.
Unghiul de lansare (fig.71)
Fig.71. Aruncarea greutăţii:
&-unghiul de lansare; B-unghiul de teren; I-înălţimea de lansare
Teoretic în orice aruncare, unghiul cel mai favorabil pentru
obţinerea unei traiectorii cât mai lungi de aruncare este de 45 grade.
Acest principiu este valabil pentru aruncările în vid; în probele sportive
intervin numeroşi factori care modifică unghiul de lansare şi anume:
rezistenţa aerului, calităţile aerodinamice ale obiectelor de concurs etc.
La unele aruncări greutatea în special, unghiul de lansare este mai
mic de 45grade, (30-40 grade) întrucât, din motive anatomo funcţionale
eficacitatea impulsiei este mai mare dacă se face perpendicular pe torace.
Unghiul de teren (fig. 71) – este format din orizontala solului şi
din dreapta care uneşte locul de cădere al obiectului cu punctul de
lansare.
153

Practica a arătat că se realizează cea mai lungă traiectorie atunci
când unghiul de lansare şi jumătate din unghiul de teren totalizeaza
împreună 45 grade.
La aruncarea discului, ciocanului şi suliţei, unghiul de teren este
foarte mic din cauza lungimii mari a traiectoriei; la greutate el este mult
mai mare.
Pentru greutate, unghiul optim de teren este de 40-41 grade;
aruncătorii înalţi sunt avantajaţi faţă de cei scunzi.
Rezistenţa aerului când este opusă sensului de mişcare a
obiectului, îi frânează viteza şi provoacă scurtarea traiectoriei. Acţiunea
rezistenţei aerului se execută asupra suprafeţei frontale a obiectului, pe
secţiunea sa dominantă şi este proporţională cu mărimea acestei
suprafeţe. Suprafaţa frontală a secţiunii dominante variază cu înclinarea
obiectului (disc, suliţă) pe direcţia traiectoriei. De asemenea, rezistenţa
aerului creşte proporţional cu pătratul vitezei de zbor şi cu sensul şi
viteza curenţilor de aer (vântul).
Fazele aruncărilor. Deşi sunt diferite ca formă de execuţie,
aruncările au un fond comun caracterizat prin faze care se succed şi
anume:
- pregătirea pentru aruncare;
- elanul ;
- efortul final sau aruncarea propriu-zisă;
- restabilirea după aruncare.
Pregătirea pentru aruncare – constă din prinderea obiectului
urmată de o serie de mişcări cu scopul de a-l pune pe aruncător într-o
poziţie cât mai favorabilă de pornire în elan.
Astfel avem: ridicări pe piciorul de sprijin în aruncarea greutăţii,
legănări la disc sau 1-3 rotări la lansarea ciocanului. Aceste mişcări au
154

rolul de a pune în tensiune lanţurile musculare care vor efectua elanul,
creând condiţii mecanice optime prin dispunerea corespunzatoare a
pârghiilor osoase în cadrul lanţurilor cinematice ale trunchiului şi
membrelor.
Ele mai au rolul de a determina apariţia unor informaţii
proprioceptive la nivelul muşchilor în vederea unei bune coordonări a
aruncării.
La disc şi ciocan, aceste mişcări mai au şi rolul de a realiza o
viteza circulară necesară efortului de aruncare.
Elanul – este compus dintr-o serie de mişcări care au drept scop
asigurarea unei viteze iniţiale optime, precum şi din luarea de către
aruncător a unei poziţii cât mai favorabile pentru efectuarea cu eficacitate
maximă a efortului final de aruncare.
Structura elanului este determinată de tehnica tipurilor de
aruncare. Astfel avem:
- elanuri sub formă de săltare, la aruncarea greutăţii;
- elanuri sub formă de piruetă în lansarea discului, ciocanului;
- elanuri sub formă de alergare la suliţă.
Elanul determină creşterea traiectoriei de aruncare cu 1-2 m, la greutate
3-8 m, la disc, 15 -20 m, la suliţă.
În timpul elanului, trenul inferior al corpului se deplasează mai
repede decât trenul superior şi mâna care ţine obiectul de aruncat. Se
creează un moment denumit de autori depăşirea aparatului care are rolul
de a accentua la maxim starea de tensiune a lanţurilor musculare care vor
efectua efortul de aruncare şi mărirea prin aceasta a randamentului. Este
necesar ca în cadrul elanului să existe o coordonare cât mai bună a
impulsurilor parţiale care pun în contracţie succesivă sau simulatană
diferite grupe musculare.
155

Efortul final – este constituit dintr-o contracţie puternică a
lanţurilor musculare care imprimă o viteză crescută obiectului, ce se
adaugă la viteza elanului.
Din compunerea acestor două viteze rezultă viteza iniţială de
aruncare a obiectului. În cadrul acestei faze este important să nu existe
nici o forţă de frecare, sau acţiunea acestora să fie micşorată la
maximum; unele cauze de frână pot fi: încetinirea elanului sau oprirea
pentru a se creea baza de sprijin necesară efortului de aruncare.
Efortul musculaturii corpului începe prin contracţia puternică a
maselor musculare a trunchiului la nivelul bazinului şi a regiunii
lombare. Succesiunea intrării în contracţie a grupelor musculare
următoare poate fi asemănată cu o undă contractilă care porneşte din
regiunea C.G.G şi difuzează ondulatoriu către extremităţi.
Timpul de contracţie, durata acţiunii musculaturii trebuie
continuate cât mai mult.
Lanţurile musculare care efectuează efortul final de aruncare
antrenează grupe musculare antagoniste, dintre care unele acţionează
după tipul de învingere iar altele după tipul de cedare. Principalul efort
dinamic de învingere îl depune un lanţ muscular format din: extensorii
mâinii, ai cotului, anteductorii şi abductorii articulaţiei scapulo-
humerală, muşchii care fac deplasarea ventrală şi bascula laterală a
scapulei.
Acest lanţ muscular al membrelor superioare se continuă la torace
cu lanţurilor ventrale încrucişate ale pereţilor abdominali, iar la
membrele inferioare cu lanţul triplei extensii. Concomitent antagoniştii
acestui lanţ muscular, atât la trunchi cât şi la membre, depun un efort
dinamic de cedare. Este de subliniat îndeosebi activitatea de cedare a
muşchilor şanţurilor vertebrale.
156

Poziţia corpului aruncătorului în efortul final de aruncare este
în echilibru nestabil, din care cauza în timpul acestui efort care
dezechilibrează corpul prin împingere C.G.G înainte, este necesar să fie
asigurat şi echilibrul; acest lucru se face printr-o contribuţie musculară
statica de fixare a lanţurilor musculare antagoniste ale trunchiului şi
membrelor inferioare. Astfel efortul de aruncare se îndeplineşte cu
concursul împletirii activităţii dinamice cu activitatea statică; dozarea
efortului static pe parcursul efortului dinamic este strâns legată de
informaţiile proprioceptive care sosesc neîncetat la sistemul nervos
central, de la muşchi, tendoane şi ligamente.
Păstrarea echilibrului este şi rezultatul unei sinteze corticale între
informaţiile proprioceptive, informaţiile vestibulare şi cele venite pe
calea analizatorilor vizuali.
Faza de restabilire – începe imediat ce obiectul a părăsit
mâna aruncatorului; ea are drept scop frânarea vitezei orizontale a
corpului şi restabilirea echilibrului. Frânarea mişcării şi restabilirea
echilibrului după aruncare se efectuează în diferite moduri, în funcţie de
tipul de aruncare şi de viteza orizontală a corpului.
Astfel, la aruncarea suliţei, unde viteza orizontală restantă este mare
pe langă activitatea musculară se efectuează şi un pas lung pentru
mărirea bazei de susţinere a corpului. La disc şi ciocan unde este necesar
să fie frânată mişcarea de rotaţie a corpului, se efectuează o serie de
mişcări ale trunchiului şi membrele inferioare, fără ca acestea să fie
ridicate de pe sol. La greutate, efortul final de restabilire se efectuează
fără deplasări ale membrelor inferioare.
În general, la toate tipurile de aruncări, efortul muscular în faza
de restabilire antrenează contracţia grupelor şi lanţurilor musculare
antagoniste, celor care au făcut impulsia şi este de tip dinamic de cedare.
157

Elementele de efort dinamic sunt completate cu o participare
importantă statică a musculaturii necesară pentru restabilirea şi
menţinerea echilibrului corpului, unde rolul cel mai important îl au
lanţurile musculare ale membrelor inferioare şi a şanţurilor vertebrale.
La disc şi ciocan în restabilirea echilibrului după lansare, un rol
important îl îndeplinesc şi membrele superioare care prin mişcări variate
măresc momentul inerţial şi capacitatea de restabilire a echilibrului.
Scoarţa cerebrală care conduce această activitate şi centrii subcorticali,
folosesc în reglarea mişcărilor informatii complexe primite de la
proprioceptori, aparatul vestibular şi analizatorul vizual.
8.3.2.1. Analiza biomecanică a aruncării ciocanului
Aruncarea ciocanului este o mişcare complexă de tip lansare ale cărei
faze sunt urmatoarele:
- poziţia de plecare ;
- elanul cu rotările iniţiale şi piruietele;
- efortul final;
- restabilirea echilibrului (fig.72).
În timpul elanului şi efortului final se dezvoltă o puternică forţă
centrifugă, care este echilibrată pâna la eliberare de către musculatura
corpului.
Forţa centrifugă dezvoltată se exercită sub forma de tracţiuni aplicate
asupra mânerului ciocanului arată o îmbinare de efort muscular dinamic
şi static. În prima parte a elanului aruncătorul aflat cu spatele în direcţia
aruncării, imprimă ciocanului o mişcare circulară în plan înclinat; în cea
de a doua parte a elanului odată cu intrarea în prima piruetă, începe
rotarea întregului sistem – aruncător–ciocan, concomitent cu o mişcare
158

de translaţie, corpul înaintând cu circa 50-55 cm la fiecare din cele trei
piruete.
Fig.72. Lanţurile musculare care asigură aruncarea ciocanului:
a) rotările preliminare; b) piruetele; c) pregătirea finalului, finalul şi lansarea
Ca urmare a acestor mişcări, ciocanul primeşte o acceleraţie care
creşte progresiv şi ajunge la maximum în momentul efortului maxim.
Odată cu acceleraţia, creşte şi valoarea forţei centrifuge, căreia trebuie
să-i facă faţă aruncătorul printr-un efort considerabil în care se îmbină
activitatea dinamică de cedare cu cea statică de echilibrare. Făcând o
sinteză a activităţii musculare rezultă că în aruncarea ciocanului lanţurile
159

musculare cele mai solicitate sunt rotatorii către stânga ai trunchiului şi
membrelor superioare, muşchii şanţurilor vertebrale şi tripla extensie la
membrele inferioare.
Activitatea dinamică de învingere şi de cedare a acestor lanţuri
musculare se împleteşte cu activitatea statică de fixare (echilibrare)
depuse de lanţurile musculare antagoniste ale trunchiului şi membrelor
inferioare.
Ţinând seama de aceste date, este recomandabil ca în
antrenamentul aruncătorilor de ciocan să se introducă exerciţii statice şi
dinamice în proporţiile corespunzatoare activităţii depuse de lanţurile
musculare pe parcursul mişcării.
În stabilirea exerciţiilor trebuie să se ţină seama ca acestea sa nu
fie prea diferite de deprinderea motrică de bază spre a nu se creea
deprinderi parazite; de asemenea, trebuie să se ţină seama şi de
specificul activităţii musculare statică sau dinamică.
8.3.2.2. Analiza biomecanică a aruncării discului
Aruncarea discului este o mişcare de tip « lansare » în care
sportivul execută o serie de mişcări însoţite de piruete, care se desfăşoară
în patru faze:
- pregătirea pentru lansare;
- elanul;
- efortul final;
- restabilirea (fig 73).
160

Fig.73. Lanţurile musculare care asigură aruncarea discului.
Pregătirea se caracterizează printr-o serie de mişcări de legănare,
cu scopul de a asigura o poziţie optimă pentru pornirea în elan.
Elanul este format de câteva mişcări de avântare care constau în
flexii şi extensii succesive ale membrelor inferioare, urmate de câteva
piruete. Avântarea pune în stare de tensiune lanţurile musculare ale
membrelor inferioare, pregătindu-le pentru efortul final. Piruetele au
drept scop realizarea unei viteze de rotaţie cât mai mare, necesară
zborului discului pe o traiectorie cât mai lungă. Sunt solicitate
următoarele lanţuri musculare: în faza de avântare acţionează alternativ
prin efort dinamic de învingere şi de cedare tripla extensie şi muşchii
şanţurilor vertebrale. Piruetele sunt asigurate de către muşchii care rotesc
trunchiul şi membrele inferioare (sistemele încrucişate abdominale şi ale
şanţurilor vertebrale). În timpul piruetelor, membrul superior care ţine
discul este în extensie şi retroducţie, lanţurile sale musculare fiind
întinse, în stare de tensiune, pregătite pentru efortul de lansare.
Efectuarea cu viteză cât mai mare a piruetelor determină creşterea
lungimii traiectoriei discului cu 3-9 m.
La începători apar forţe de frânare ale lanţurilor musculare
antagoniste, care trebuie treptat eliminate; aceasta se poate obţine prin
161

repetări multiple şi în timp a mişcărilor, corectându-le permanent. Un rol
important în procesul obţinerii unei acordări fine şi adecvate îl au
informaţiile proprioceptive şi substanţa reticulată a trunchiului cerebral.
Efortul final adaugă vitezei elanului o nouă forţă motrică care se
aplică discului şi-i măreşte viteza iniţială; această forţă motrică este
rezultatul contracţiei unor serii de grupe şi lanţuri musculare. Efortul
muscular începe printr-o contracţie puternică a maselor lombare care
difuzează apoi ca o undă către extremităţi.
Pe lângă activitatea dinamică, există şi o activitate musculară
statică, de echilibrare, care antrenează numeroase grupe şi lanţurile
musculare, cele mai solicitate fiind cele de la membrele inferioare şi
şanţurile vertebrale. Valoarea şi dozarea efortului static ce se depune pe
parcursul efortului dinamic de lansare este strâns legată de informaţiile
proprioceptive care sosesc neîncetat la scoarţa cerebrală de la muşchi,
tendoane şi ligamente.
Caracteristica efortului muscular final este de contracţie
maximă şi prelungită.
Faza de restabilire începe de îndată ce discul a părăsit mâna
aruncătorului. Ea are drept scop frânarea mişcării de rotaţie, deplasarea
corpului înainte şi restabilirea echilibrului.
Această activitate este asigurată de grupele şi lanţurile musculare
antagoniste şi acelora care au efectuat efortul final. La acest efort
dinamic de cedare se adaugă o importantă componentă statică de
echilibrare, unde rolul principal îl au muşchii şanţurilor vertebrale şi
lanţurile musculare antagoniste ale membrelor inferioare. Un rol
important în restabilirea echilibrului după lansare revine şi membrelor
superioare care efectuează mişcări laterale şi de balansare.
162

Ţinând seama de datele furnizate de analiza biomecanică este
recomandabil ca în metodica antrenamentului discobolilor să se introducă
exerciţii dinamice şi statice în proporţie corespunzatoare activităţii
depuse de lanţurile musculare pe parcursul mişcării.
În stabilirea exerciţiilor trebuie să se ţină seama, în afară de
specificul activităţilor musculare, şi de faptul că exerciţiile să nu fie
prea diferite de deprinderea motrica de bază, care să frâneze obţinerea
unor performanţe înalte.
8.3.2.3. Analiza biomecanică a aruncării suliţei
Aruncarea suliţei este o mişcare complexă de tip azvârlire,
având din punct de vedere biomecanic patru faze: pregătirea, elanul,
efortul final şi restabilirea.
Elanul (fig 74) – constă dintr-o alergare accelerată, progresiv,
în timp ce suliţa depăşeşte uşor umărul drept; musculatura depune un
efort dinamic asemănător cu cel din alergarea de viteză.
Fig.74. Lanţurile musculare care asigură aruncarea suliţei
163

Cu câţiva paşi înainte de azvârlire, sportivul efectuează faza de
depăşire a aparatului, care constă în deplasarea înainte a bazinului în
timp ce membrul superior cu mâna care ţine suliţa este dus mai înapoi,
iar trunchiul se înclină pe spate. Rolul acestei faze este de a realiza o
întindere a lanţurilor musculare care vor efectua efortul final de
impulsie.
Explicaţia biomecanică a acestei faze, precum şi utilizarea sa
rezultă din urmatoarele: este cunoscut faptul că lucrul mecanic efectuat
de un muşchi se calculează după formula:
Lm = F.d.
unde F= forţa, iar d= deplasarea (lungimea scurtării muşchiului).
Formula aceasta este valabilă numai în cazul în care forţa
acţionează de-a lungul deplasării. Dacă însă forţa face cu direcţia
deplasării un unghi oarecare alfa, ecuaţia lucrului mecanic devine:
Lm = f x cosinus de α
În aceste cazuri, forţa F, are două componente, una normală –
care este îndreptată către sprijin şi se anulează, şi una tangenţială care
produce deplasarea obiectului sau segmentului corpului. După legea lui
Weber – Fick scurtarea maxima a muşchilor se face până la ½ din
lungimea părţii cărnoase a muşchiului aflat în repaus. După această lege,
scurtarea determină amplitudinea mişcării la nivelul articulaţiilor şi este
în funcţie de lungimea părţii carnoase a muşchilor care produc mişcarea.
În cazul nostru, la azvârlirea suliţei, faza de depăşire a
aparatului are rol de a mari lungimea unor grupe musculare (cele care
vor efectua efortul de împulsie) şi prin aceasta de a creşte lungimea
scurtării determinând astfel mărirea valorii lucrului mecanic efectuat şi
implicit creşterea randamentului la aruncarea suliţei.
164

Efortul final – constă dintr-o contracţie foarte puternică a unui
vast lanţ muscular, care începe la nivelul mâinii cu suliţa, se continuă
încrucişând trunchiul şi se termină cu piciorul care se sprijină pe sol.
Acest lanţ muscular este format din flexorii degetelor (care în partea
finală a impulsiei se relaxează şi eliberează suliţa), extensorii cotului,
abductorii şi anteductorii în articulaţia umărului, muşchii care
deplasează ventral şi basculează lateral scapula, lanţurile rotatorii către
stânga ale trunchiului care îl înlănţuiesc în spirală şi lanţul triplei
extensii de la piciorul de sprijin.
Activitatea acestui lanţ muscular este dinamică, de învingere;
concomitent, lanţul muscular antagonist depune un efort muscular
dinamic de cedare.
În condiţiile unei tehnici avansate în aruncarea suliţei, efortul
muscular trebuie să înceapă la nivelul regiunii învecinate C.G.G de unde
să difuzeze către extremităţi. Astfel se produce pentru jumătatea
superioară a corpului o mişcare asemănătoare celei de biciuire care se
termină la nivelul mâinii în momentul când aceasta eliberează suliţa
pentru înscriere pe traiectorie.
În faza de restabilire – echilibrul corpului se asigură prin
frânarea vitezei liniare a elanului şi redresarea corpului aplecat înainte la
sfârşitul fazei de impulsie.
În paralel contribuie şi o activitate musculară statică
de echilibrare caracteristică tuturor stilurilor de aruncare. La asigurarea
echilibrului mai contribuie şi efectuarea unui pas sau doi pentru mărirea
bazei de susţinere a corpului.
165

8.4. Analiza biomecanică a unor mişcări complexe din jocurile
sportive
Mişcările din jocurile sportive antrenează într-o măsură mai mare
sau mai mică majoritatea musculaturii corpului. Din acest motiv, analiza
biomecanică în jocurile sportive trebuie făcută separat pentru fiecare
element de tehnică şi nu global, întrucât mişcările sunt de o complexitate
extremă. Cu toate acestea, în jocurile sportive există fără a constitui însă
o regulă, poziţiile iniţiale şi finale, precum şi mişcări cu aceleaşi
caracteristici generale de structură: lovitura de atac la volei, aruncarea la
coş în baschet, lovitura de la 7 m la handbal, şutul la fodbal, etc.
În general, în analiza biomecanică a unor procedee tehnice din
jocurile sportive trebuie studiate urmatoărele aspecte:
a). Condiţiile mecanice iniţiale din procedeul de studiere;
b). Înteracţiunea forţelor pe parcursul execuţiei propriu-zise a
mişcării. Când se studiază o mişcare se urmăreşte: direcţia, viteza,
acceleraţia cu referiri la C.G.G şi la centrele de greutate parşiale ale
segmentelor;
c). Mişcarea complexă se împarte în faze şi momente care se
analizează fiecare separat, făcându-se legătura între ele.
d). După analiza mişcării de bază se descriu variantele tehnice
şi particularităţile individuale.
c). În concluzia oricărei analize biomecanice se vor trage
învăţăminte privind îmbunătăţirea metodicii antrenamentului sportiv. O
importanţă deosebită o are precizarea tipului de activitate musculară care
ne dă indicaţii preţioase în alegerea exerciţiilor şi aparatelor folosite în
antrenamentul sportivilor.
166

8.4.1. Elemente de analiză biomecanică în jocul de volei
Dinamismul jocului de volei solicită mult lanţurile musculare ale
trunchiului şi membrelor. Pe lângă activităţile dinamice muscularatura
depune şi o importantă activitate statică de echilibrare pentru asigurarea
poziţiei corpului aflat deseori în situaţii de dezechilibrare marcată. Din
aceste situaţii sportivul trebuie să efectueze o serie de execuţii tehnice,
dificile în scopul de a readuce mingea în teren sau de a o ridica şi servi
pentru joc coechipierilor. Vom analiza unul din aceste procedee tehnice:
lovitura de atac (fig 75).
Fig. 75. Lanţurile musculare care asigură lovitura de atac la volei
Lovitura de atac – este o mişcare viguroasă, desfăşurată cu forţă
şi în viteză maximă cu scopul de a imprima mingii o viteză de deplasare
cât mai mare şi o traiectorie care să surprindă apărarea adversă. Mişcarea
se execută de regulă în apropierea plasei şi din săritură. Mişcarea de
lovire constă dintr-o contracţie puternică– balistică de tip învingere a
167

unui lanţ muscular lung, care începe la membrele superioare cu: flexorii
carpului şi cotului, retroductorii cotului, retroductorii braţului, muşchii
coborâtori şi cei care basculează medial scapula, lanţul se continuă la
trunchi cu muşchii pereţilor abdominali, iar la membrele inferioare cu
lanţul triplei extensii. O menţiune specială trebuie acordată muşchilor
pronatori ai antebraţelor şi si flexorilor carpului, de care depinde direcţia
traiectoriei mingei. Executarea şi în viteză a acestei mişcări cere o
participare importantă a analizatorului vizual şi informaţii corecte de la
proprioreceptori, care să furnizeze centrilor nervoşi motori informaţii
suficiente privind orientarea în spaţiu şi aprecierea distanţei. După
efectuarea loviturii, efortul muscular se adresează restabilirii echilibrului
după luarea contactului cu solul, unde un rol deosebit îl au: muşchii
şanţurilor vertebrale şi toate lanţurile musculare antagoniste de la
membrele inferioare, tipul acestei activităţi este static de fixare. De la
acest lanţ muscular se cere forţă, viteză şi precizie; pe baza analizei
biomecanice făcute, se pot imagina exerciţii şi aparate care să dezvolte cu
precădere la acest lanţ muscular calităţile motrice arătate.
8.4.2. Elementele de analiză biomecanică în baschet
Spre deosebire de celelalte jocuri sportive, baschetul cuprinde în
dinamica exerciţiilor sale tehnice cu precădere elementele de viteză,
îmbinate cu precizie, pe un fond de pregătire fizică generală caracterizată
printr-o mare rezistenţă.
Musculatura corpului este solicitată global şi multilateral. Astfel în
ceea ce priveşte activitatea dinamică, există o preponderenţă a lucrului
mecanic depus de ½ superioară a corpului, în timp ce membrele
inferioare acţionează ca un suport mobil şi elastic, care execută
168

concomitent paşi de alergare întreruptă de numeroase schimbări de
direcţie.
Un rol deosebit îl au lanţurile musculare încrucişate ale pereţilor
abdominali şi ale sanţurilor vertebrale, care asigură rotările şi pivotările
trunchiului pe bazin, şi pe membrele inferioare.
În ceea ce priveşte dinamica membrelor superioare ea se
caracterizează prin dese ridicări ale acestora combinate cu extensia
coloanei vertebrale urmate fie de pase, fie de aruncări la coş (fig.76)
Fig.76. Lanţurile musculare care efectuează aruncarea din elan în jocul de baschet
169

Redresarea trunchiului şi ridicarea membrelor superioare trebuie
executate cu mare viteză şi precizie, adesea din alergare, cu capul flectat
înainte sau înclinat lateral. Principalul rol în execuţia acestor mişcări îl
are un lanţ muscular format din muşchii şanţurilor vertebrale continuat la
membrele superioare şi extensorii cotului, anteductorii braţului, precum
şi muşchii care ridică şi basculează, deplasează– medial scapula.
Pe lângă activitatea dinamică, musculatura depune şi o importantă
activitate statică. Ceea ce caracterizează efortul static este asigurarea
echilibrului în condiţiile unui mare dinamism, precum şi creerea unui
sprijin eficient pentru efectuarea unor mişcări în viteză şi cu precizie.
Principalul rol în activitatea statică revine membrelor inferioare
şi bazinului, adică acelor componente ale corpului care sunt situate sub
nivelul C.G.G. Este cunoscut faptul că în condiţiile jocului de baschet,
C.G.G al corpului suferă deplasări multiple în mare viteză, ceea ce
crează solicitări statice variate pentru asigurarea echilibrului. Principală
cauză mecanic care solicită static musculatura corpului este variaţia
permanentă atât a măririi bazei de sprijin a corpului (când pe un picior
când pe altul, când pe ambele picioare apropiate sau departate), a
numeroaselor înclinări în diferite sensuri care determină ieşirea verticalei
C.G.G în afara bazei de sprijin. Datorită acestor cauze, în jocul de
baschet există o variaţie mare a unghiului de stabilitate, ceea ce măreşte
solicitarea statică.
Vom analiza aruncarea la coş a mingiei. Aruncarea de pe loc
începe printr-o poziţie iniţială caracterizată biomecanic printr-o uşoară
coborâre a C.G.G, îndatorită unei uşoare flexii a trunchiului şi
membrelor inferioare. Membrele superioare care ţin mingea se află în
flexie de aproape 90 grade la cot şi în uşoara anteducţie a braţelor;
170

privirea caută să facă o cât mai bună apreciere a distanţei. Din această
poziţie jucatorul efectuează o extensie a membrelor inferioare care
ridică C.G.G, şi o tragere a mingei către corp. Urmează aruncarea
propriu-zisă, asigurată de un lanţ muscular format din extensorii cotului,
anteductorii şi abductorii braţului, ridicătorii centurii scapulare şi
muşchii care basculează lateral scapula; la membrele inferioare
acţionează tripla extensie, iar la trunchi, muşchii şanţurilor vertebrale.
Aruncarea la coş este prin excelenţă o probă de mare fineţe,
precizie şi înaltă coordonare nervoasă, unde informaţiile de la
analizatorul vizual, cele proprioceptive şi vestibulare joacă un rol de o
deosebită importanţă. Trebuie de asemenea menţionat rolul concentrării
psihice care precede şi însoţeşte efortul de aruncare.
Aruncarea din elan ridică probleme grave atât mecanice cât şi
tehnice şi de coordonare nervoasă. Din punct de vedere muscular ea este
asigurată de aceleaşi grupe musculare, la care se adaugă lanţurile
musculare încrucişate ale trunchiului.
8.4.3. Elemente de analiză biomecanică în hanbal
Hanbalul în 7 se caracterizează printr-o activitate motrică
complexă şi un mare dinamism. În timp ce trunchiul şi membrele
superioare efectuează mişcări variate care solicită puternic toate lanţurile
musculare ale membrelor inferioare pe lângă activitatea dinamică de
alergare îndeplinesc şi un important rol static de asigurare a echilibrului
corpului şi de suport pentru mişcările trunchiului şi membrelor inferioare.
Lovitura de la 7 metri se caracterrizeaza prin forţa, care este
necesară imprimării unei viteze iniţiale maxime mingiei şi surprinderii
portarului, (derutarera lui asupra traiectoriei probabile). Musculatura
171

care efectuează lovitura, formează un lanţ muscular întins, care începe la
membrul superior cu mingea, trece peste trunchi şi se termină la
membrele inferioare. Acest lanţ muscular care depune o intensă
activitate de învingere deplasează ventral şi basculează lateral scapula;
el se continuă cu lanţurile musculare ventrale ale trunchiului
(în special rotatorii) şi cu tripla extensie de la membrele inferioare de
sprijin.
La mişcările înşelătoare (fentare) contribuie lanţurile musculare
rotatorii ale trunchiului.
Pe lângă activitatea musculară dinamică se depune şi un
important efort static pentru asigurarea echilibrului corpului.
Efortul muscular static de echilibrare este îndeplinit de grupele şi
lanţurile musculare ale întregului corp, prin jocul antagonismelor
musculare care asigură poziţia echilibrată, corectă şi adecvată fiecarei
tehnici în parte. El are o valoare cu atât mai crescută, cu cât verticala
C.G.G, cade mai în afara bazei de sprijin. De aceea în metodica
antrenamentului jucatorilor de hanbal trebuie introduse şi exerciţii de
echilibrare a organismului.
Efortul muscular dinamic, caracterizat printr-o variabilitate
extremă a muşchilor antrenează de asemenea un mare numar de grupe şi
lanţuri musculare care, adeseori cuprinde întrega musculatură a corpului.
De aceea este greu de făcut o analiză biomecanică concretă efortului
muscular dinamic. Este extrem de important să precizăm pentru fiecare
tehnică în parte, grupele şi lanţurile musculare cele mai importante, care
condiţionează eficienţa tehnicii respective.
Prezentăm în continuare caracteristicile biomecanice pentru câteva
din principalele tehnici din jocul de hanbal.
172

Aruncarea din săritură - se caracterizează prin faptul că se efectuează
fără sprijin pe sol, aruncarea propriu-zisă începe în momentul în care se
află în punctul maxim al săriturii. (fig.77)
77. Lanţurile musculare care asigură aruncarea la poartă din săritura, la handbal
Răsucirea trunchiului spre stânga se execută cu complexul de
lanţuri musculare încrucişate ale muşchilor pereţilor abdominali în
sinergie cu sistemele rotatorii ale şanţurilor vertebrale.
Din poziţia de extensie maximă braţul drept care va excuta
aruncarea începe tracţiunea şi apoi biciuirea, actvitate asigurată de un
lanţ muscular format din flexorii degetelor, flexorii carpului, ai cotului,
retroductorii şi aductorii braţului, muşchii care coboară şi basculează
medial scapula. Acest lanţ muscular se continuă la nivelul trunchiului cu
sistemele rotatorii ale lanţurilor încrucişate.
Activitatea dinamică de învingere depusă de acest lanţ muscular
trebuie să dezvolte forţa, viteza şi precizie.
Grupele musculare antagoniste, lanţului descris depune o
activitate musculară dinamica de cedare şi au un rol important în
coordonarea fină a tehnicii mişcării respective. Faptul că efortul
muscular de aruncare, se execută fără sprijin pe sol, impune musculaturii
173

corpului un efort sporit care este complex întrucât pe langă forţă, viteza
şi precizie, traiectoria care este asigurată prin activitatea dinamică,
necesită şi un efort de echilibrare a corpului în aer, pentru că acestea să
nu basculeze în jurul C.G.G.
Aruncarea cu pas încrucişat – este o aruncare cu sprijin pe sol
ceea ce îi conferă o mai mare forţă în comparaţie cu aruncările din
săritura.
La trunchi şi membrele superioare acţionează acelaşi lanţ
muscular format din flexorii degetelor, ai carpului, cotului, retroductorii
şi adductorii braţului, coborătorii, muşchii care basculează medial
scapulă, iar la membrele inferioare principalul efort este asigurat de
lanţul triplei extensii, prin activitatea dinamică de învingere. Întrucât
este vorba de paşi încrucişaţi, se adaugă succesiv pentru fiecare membru
inferior în parte şi grupa muşchilor adductori şi ai coapsei.
Cunoaşterea grupelor şi lanţurilor musculare care asigură efortul
în aruncările descrise ne permite o mai bună structurare a exerciţiilor de
pregătire a jucătorilor de handbal.
8.4.4. Elemente de analiză biomecanică în fotbal
Fotbalul caracterizat printr-un dinamism accentuat, o mişcare
continuă pe întrg terenul, de o complexitate extremă, analiza
biomecanică nu poate fi făcută decât pe diferite elemente tehnice.
În compunerea oricărui procedeu sau element tehnic intră atât
mişcarea pe care o efectuează jucătorul până când ia contact cu mingea,
cât şi mişcarea segmentelor corpului angrenate în execuţia propriu-zisă.
C.G.G oscilează în diferite direcţii, determinând prin aceaste variaţii ale
gradului de stabilitate care trebuie compensate prin efort muscular.
174

Uneori este necesar ca sportivul să aibă execuţii tehnice din cădere
răsturnare, ceea ce complică asigurarea conducerii neuro-musculare şi a
reglării fine a mişcării.
În specificul jocului de fotbal membrele inferioare îndeplinesc
două funcţii fundamentale şi anume, ca organe de sprijin şi de execuţie
tehnică.
De aceea în analiza biomecanică din jocul de fotbal este necesar
să se descrie atât activitatea piciorului de sprijin cât şi cea a piciorului de
execuţie. Contribuţia principală revine piciorului de sprijin, în timp ce
restul corpului serveşte unor scopuri diverse. Astfel în timp se piciorul
de sprijin asigură menţinerea greutăţii corpului, membrele superioare
servesc la păstrarea echilibrului prin mişcări compensatorii, iar trunchiul
contribuie la corectituninea poziţiei. Toate aceste activităţi favorizează
realizarea scopului principal, crearea condiţiilor tehnice şi biomecanice
optime pentru efectuarea loviturii de către piciorul de excuţie.
Dintre numeroasele procedee tehnice folosite în jocul de
fotbal descriem lovitura mingii cu piciorul (şutul fig.78).
Fig.78. Analiza şutului la fotbal (lovitura cu stângul, lovitura cu dreptul şi lovitura
laterală)
175

Este cea mai frecventă mişcare folosită în fotbal, putând fi făcută
de pe loc sau din mişcare, direct sau prin răsturanare; mingea se loveşte
cu vârful piciorului, cu părţile laterale, cu ristul sau cu călcâiul.
În lovitura de pe loc deosebim următoarele faze: pregătirea,
execuţia, restabilirea. Pregătirea constă dintr-o alergare; execuţia se face
cu unul din membrele inferioare în timp ce celălalt serveşte ca sprijin
elastic. Piciorul de sprijin se află în uşoară flexie din toate articulaţiile
prin contribuţia dinamică de cedare a lanţului triplei extensii. Piciorul de
şut este dus mult înapoi, prin acţiunea unui lanţ muscular format din:
extensorii coapsei pe bazin, flexorii genunchiului şi flexorii plantari.
Datorită acestei mişcări este pus în stare de tensiune lanţul
muscular care va efectua lovitura şi anume: flexorii coapsei pe bazin,
extensorii genunchiului şi flexorii dorsali ai articulaţiei talo-crurale.
Scopul mişcării pregătitoare prin ducerea înapoi a piciorului de
sprijin este pentru a creea prin întinderea lanţului muscular creşterea
lungimii scurtării, implicit lucrul mecanic efectuat. Urmează apoi o
contracţie balistică, care detrmină pendularea viguroasă înainte a
piciorului către mingie. Mişcarea este accelerată până la contactul cu
mingea căreia îi transmite prin lovitură o mare energie cinetică. Precizia
mişcării se asigură prin jocul grupelor musculare antagoniste şi printr-o
înaltă coordonare nervoasă.
176

CUPRINS
CUVÂNT ÎNAINTE………………………………………….2
PREFAŢĂ………………………………………………………4
PARTEA I. BIOMECANICĂ GENERALĂ 6
CAPITOLUL I. NOŢIUNI SUMARE DE MATEMATICĂ 7
1.1. Elemente de trigonometrie………………………………... 9
1.2. Elemente de mecanică aplicate la corpul omenesc……… 10
CAPITOLUL II. STATICA…………………… 12
2.1. Masă, greutate, forţa gravitaţională……………………... 12
2.2. Centrul de greutate……………………………………….. 13
2.3. Determinarea centrelor de greutate segmentară……….. 17
2.4. Centrul general de greutate………………………………. 19
2.5. Centrul volumului corpului……………………………… 23
2.6. Centrul suprafeţei corpului……………………………….. 24
2.7. Linia de gravitaţie…………………………………………. 24
2.8. Poligonul de sprijin (susţinere)…………………………… 25
2.9. Echilibrul corpurilor……………………………………… 28
2.9.1. Echilibrul stabil………………………………………. 28
2.9.2. Echilibrul instabil……………………………………. 29
2.9.3. Echilibrul indiferent………………………………….. 31
2.10. Pârghiile şi aplicaţiile lor la corpul omenesc…………… 31
CAPITOLUL III. DINAMICA 37
3.1. Legile mişcării descrise de Newton (I, II, III)……………. 37
3.2. Forţa………………………………………………………... 40
3.3. Momentul forţei…………………………………………… 41
177

3.4. Lucrul mecanic……………………………………………. 42
3.5. Puterea……………………………………………………... 48
3.6. Energia……………………………………………………... 49
3.6.1. Energia cinetică………………………………………. 49
3.6.2. Energia potenţială……………………………………. 50
CAPITOLUL IV. CINEMATICA 51
4.1. Mişcarea……………………………………………………. 51
4.1.1. Mişcarea lineară, curbilinie, translaţie, rotaţie şi
generală………………………………………………………….
52
4.1.2. Viteza şi acceleraţia………………………………….. 55
CAPITULUL V. NOŢIUNI DE MECANICĂ APLICATE LA APARATUL LOCOMOTOR
57
5.1. Proprietăţile mecanice ale osului…………………………. 57
5.2. Proprietăţile mecanice ale muşchilor…………………….. 62
5.3. Lanţurile articulare……………………………………….. 64
5.3.1. Lanţuri cinematice deschise…………………………. 64
5.3.2. Lanţuri cinematice închise…………………………... 69
5.3.3. Lanţuri cinematice parţial închise………………….. 67
5.4. Lanţurile cinematice musculare………………………….. 69
5.4.1. Acţiunea musculară localizată şi extinsă………… 69
5.4.2. Modalităţi de acţiune a muşchilor…………………... 71
5.4.2.1. Acţiunea antagonistă…………………………... 72
5.5. Tipurile de activitate musculară………………………….. 72
5.5.1. Tipurile de activitate musculară statică……………. 74
5.5.1.1. Efortul static de consolidare…………………... 74
5.5.1.2. Efortul static de fixare…………………………. 75
5.5.1.3. Efortul static de menţinere…………………….. 76
5.5.2. Tipurile de activitate musculară dinamică………… 77
5.5.2.1. Activitatea de învingere……………………….. 77
178

5.5.2.2. Activitatea de cedare…………………………... 77
5.6. Principalele lanţuri musculare ale corpului……………... 79
5.6.1. Lanţurile musculare ale membrului superior……... 81
5.6.1.1. Mişcarea de prehensiune………………………. 83
5.6.1.2. Mişcarea de împingere………………………… 84
5.6.1.3. Mişcarea de prindere în braţe………………… 85
5.6.1.4. Mişcarea de aruncare şi lovire………………… 85
5.6.1.5. Mişcarea de tragere……………………………. 86
5.6.1.6. Sprijin realizat prin membrele superioare…… 86
5.6.2. Lanţurile musculare ale membrului inferior……… 87
5.6.2.1. Funcţia statică………………………………….. 88
5.6.2.2. Funcţia dinamică………………………………. 90
CAPITOLUL VI. PRINCIPII GENERALE DE ANATOMIE FUNCŢIONALĂ ŞI BIOMECANICĂ
93
PARTEA A- II- A. BIOMECANICA SPECIALĂ
99
CAPITOLUL VII. ANALIZA BIOMECANICĂ A POZIŢIILOR 100
7.1. Analiza biomecanică a poziţiilor cu sprijin superior……. 101
7.1.1. Poziţia atârnat………………………………………... 102
7.1.2. Poziţia atârnată active……………………………….. 103
7.1.3. Poziţia atârnat echer………………………………… 104
7.1.4. Poziţiile cu sprijinul la aparate……………………… 108
7.1.5. Poziţia sprijin lateral la inele………………………... 109
7.2. Analiza biomecanică a poziţiilor cu sprijin inferior…….. 110
7.2.1. Poziţia stand…………………………………………. 111
7.2.2. Poziţia stând normală………………………………. 111
7.2.3. Poziţia stând forţat………………………………….. 114
179

7.2.4. Poziţia stând comodă………………………………... 115
7.2.5. Poziţia stând pe vârfuri…………………………….. 116
7.2.6. Poziţiile stând asimetrice…………………………… 116
7.2.7. Poziţia stând cu piciorul ridicat înainte…………… 117
7.2.8. Poziţia stând cu piciorul ridicat înapoi…………….. 118
7.2.9. Poziţia cumpănă cu braţele lateral………………… 119
7.2.10. Poziţia de flexie ventrală a trunchiului…………… 119
7.2.11. Poziţia stând cu genunchii flexaţi………………….. 120
7.2.12. Poziţia în genunchi………………………………….. 120
7.2.13. Poziţia şezând pe un suport cu picioarele în sprijin
pe sol…………………………………………………………….
121
7.3. Poziţii cu sprijin pe membrele superioare şi inferioare… 121
7.3.1. Poziţia în sprijin culcat anterior…………………….. 122
7.3.2. Poziţia în sprijin culcat posterior…………………… 123
7.3.3. Podul………………………………………………….. 124
7.3.4. Poziţia stând pe mâini ………………………………. 125
7.4. Pozitii cu sprijin pe intreg corpul (culcat) ………………. 126
CAPITOLUL VIII. ANALIZA BIOMECANICĂ A MIŞCĂRILOR
128
8.1. Mişcările locomotorii……………………………………… 131
8.2. Analiza biomecanică a mişcărilor locomotorii ciclice ….. 132
8.2.1. Mersul…………………………………………………. 132
8.2.2. Alergarea……………………………………………… 136
8.3. Analiza biomecanică a mişcărilor locomotorii aciclice…. 140
8.3.1. Săriturile……………………………………………… 140
8.3.1.1. Săritura în lungime cu elan…………………….. 145
8.3.1.2. Săritura în înalţime……………………………… 147
8.3.1.3. Săritura cu prăjina……………………………… 149
8.3.2. Analiza biomecanică a aruncărilor…………………... 151
180

8.3.2.1. Analiza biomecanică a aruncării ciocanului…... 158
8.3.2.2. Analiza biomecanică a aruncării discului…..….. 160
8.3.2.3. Analiza biomecanică a aruncării suliţei………... 163
8.4. Analiza biomecanică a unor mişcări complexe din
jocurile sportive………………………………………………...
166
8.4.1. Elementele de analiză biomecanică în jocul de
volei……………………………………………………………...
167
8.4.2. Elementele de analiză biomecanică în baschet……... 168
8.4.3. Elemente de analiză biomecanică în hanbal……….. 171
8.4.4. Elemente de analiză biomecanică în fotbal………... 174
CUPRINS……………………………………………………….. 177
BIBLIOGRAFIE……………………………………………….. 182
181

BIBLIOGRAFIE SELECTIVĂ
1 Albertini, P. Le memento de l “educateur sportif 2e degree,
INSEP Publication, 1986.
2 Baciu, C. Anatomie func\ională şi biomecanica
aparatului locomotor, Edit. Sport-Turism,
1977.
3 Baciu, C. Biologia locomoţiei umane, EFS 22, nr.1,2,
1969
4 Baciu, C. Semiologia aparatului locomotor, Edit.
Medicală, Buc., 1975.
5 Dyson, G.H.G. Principes des mecanique en athletisme, Edit.
Vigot, Paris, 1971.
6 Dragnea, A. Teoria activităţilor motrice, Edit. Didactică şi
Pedagogică, Buc., 2000.
7 Drăgan, I. Medicina sportivă aplicată, Edit. Editis, Buc.,
1994
8 Flandrois, R. Medicine du sport, Edit. Vigot, Paris, 1986
9 Giraudet, G. Biomecanique humaine appliqué a la
reeducation, Masson, Paris, 1976.
10 Haynaut, K. Introduction a la biomecanique, Paris,
Maloine, 1976.
11 Hay, J. The biomecanics of sports techniques, Third
edition Prentice Hall, N.J., 1985.
12 Hay, J. Gavin, J. The anatomical and mechanical bases of
human motion, Prentice Hall, N.J. 07632,
1982.
182

13 Iagnov, Z.
Repciuc, E.
Rusu, I. G.
Anatomia omului, Edit. Medicală, 1962.
14 Iliescu, A. Curs de anatomie şi biomecanică, Edit.
Pedagogică, 1961.
15 Iliescu, A. Biomecanica exerciţiilor fizice şi sportului,
Edit. Sport-Turism, 1975
16 Iliescu, A. Biomecanica exerciţiilor fizice, Edit. U.C.F.S.,
1964.
17 Iliescu, A.
Gavrilescu, D.
Anatomie funcţională şi biomecanică, Edit.
Sport-Turism, 1976.
18 Mark Worth, P. Sport Medizin, Hamburg, 1944
19 Remato, M. Les bases de l “entrainement sportif, Edit,
Revue EPS, 1992.
20 Rainer, F. L”oeuvre scientifique, Buc., 1945.
21 Riga, T. Curs de anatomie funcţională, Edit. U.C.E.F.,
1963
22 Repciuc, E. Anatomia omului, vol I, Edit. Medicală, 1965.
23 Testut, L. Traite d”anatomie humaine, voi.I, Dion,
Paris,1928.
24 Weineek, J. Biologie du sport, Edit. Vigot, Paris, 1992.
25 Wiliams, M. Biomecanics of human motrix saunders comp.
1962.
183

… Document INSEP La biomechanique des gestes sportifs, Centre
de recherhe de Leipzig 1967
··· Mannuel de l educateur sportif, Paris, 1992.
··· Memento de l educateur sportif,Paris, 1986
184