1. Numere complexe. Planul complex Definitie 1. Prin num˘ar ...
263
1. Numere complexe. Planul complex Definit ¸ie 1.1. Prin num˘ ar complex ˆ ınt ¸elegm o pereche ordonat˘ a de numere reale, (a, b) . Not˘ am C := {(a, b) , a,b ∈ R} , pe care o numim mult ¸imea numerelor complexe. Pentru z =(a, b) ∈ C, not˘ am a := Rez ¸ si b := Imz. a, b se numesc partea real˘ a, respectiv imaginar˘ a, ale num˘ arului complex z. Definim, pentru z 1 =(a 1 ,b 1 ) ∈ C, z 2 =(a 2 ,b 2 ) ∈ C, z 1 + z 2 : =(a 1 + a 2 ,b 1 + b 2 ) , z 1 · z 2 : =(a 1 a 2 − b 1 b 2 ,a 1 b 2 + a 2 b 1 ) . Atunci (C,+,·) este un corp comutativ, numit corpul numerelor complexe. Dac˘ a z =(a, b) , atunci z := (a, −b) se nume¸ ste conjugatul num˘ arului complex z. Definit ¸ie 1.2. Dou˘ a numere complexe sunt egale dac˘ a au p˘ art ¸ile reale egale ¸ si p˘ art ¸ile imaginare egale. Este imediat c˘ a z · z =(a 2 + b 2 , 0) , ∀z =(a, b) ∈ C. Not˘ am cu C 0 := {(a, 0) ,a ∈ R} . Se demonstreaz˘ a imediat c˘ a(C 0 , +, ·) este tot corp comutativ. Definind T : R → C 0 , prin T (a) := (a, 0) , ∀a ∈ R, se arat˘ a u¸ sor c˘ a T este bijectiv˘ a¸ si T (a + b) = T (a)+ ϕ (b) , ∀a, b ∈ R, T (a · b) = T (a) · ϕ (b) , ∀a, b ∈ R. Deci T este izomorfism de corpuri, iar (R, +, ·)¸ si (C 0 , +, ·) sunt corpuri izomorfe. Not˘ am cu a := (a, 0) ∈ C 0 ¸ si i := (0, 1) ∈ C. i se nume¸ ste unitatea imaginar˘ a. Folosind operat ¸iile cu numere complexe, orice z =(a, b) ∈ C se poate scrie ca (a, b)=(a, 0) + (0,b)=(a, 0) + (b, 0) · (0, 1) = a + bi. Prin urmare, obt ¸inem forma algebric˘ a a numerelor complexe, (a, b)= a + bi, ∀a, b ∈ R. 1.1. Propriet˘ at ¸i algebrice ale numerelor complexe. 1) i 2 = (0, 1) · (0, 1) = (−1, 0) = −1; 2) z = Rez + Imzi; 3) Pentru orice z = a + bi ∈ C, Rez = z+ z 2 , Imz = z- z 2 ; 4) z ∈ R dac˘ a¸ si numai dac˘ a Imz = 0; 5) z ∈ R dac˘ a¸ si numai dac˘ a z = z ; 6) z = 0 dac˘ a¸ si numai dac˘ a Rez = Imz = 0; 7) Oricare ar fi z 1 ,z 2 ∈ C, z 1 + z 2 = z 1 + z 2 , z 1 · z 2 = z 1 · z 2 ¸ si, dac˘ a, z 2 =0, z 1 z 2 = z 1 z 2 . 1
Transcript of 1. Numere complexe. Planul complex Definitie 1. Prin num˘ar ...

1. Numere complexe. Planul complex
Definitie 1.1. Prin numar complex ıntelegm o pereche ordonata de numere reale,(a, b) .
NotamC := {(a, b) , a, b ∈ R} ,
pe care o numim multimea numerelor complexe.Pentru z = (a, b) ∈ C, notam a := Rez si b := Imz. a, b se numesc partea reala,
respectiv imaginara, ale numarului complex z.Definim, pentru z1 = (a1, b1) ∈ C, z2 = (a2, b2) ∈ C,
z1 + z2 : = (a1 + a2, b1 + b2) ,
z1 · z2 : = (a1a2 − b1b2, a1b2 + a2b1) .
Atunci (C,+,·) este un corp comutativ, numit corpul numerelor complexe.Daca z = (a, b) , atunci z := (a,−b) se numeste conjugatul numarului complex z.
Definitie 1.2. Doua numere complexe sunt egale daca au partile reale egale si partileimaginare egale.
Este imediat ca z · z = (a2 + b2, 0) , ∀z = (a, b) ∈ C.Notam cu
C0 := {(a, 0) , a ∈ R} .Se demonstreaza imediat ca (C0,+, ·) este tot corp comutativ. Definind T : R → C0, prin
T (a) := (a, 0) , ∀a ∈ R,
se arata usor ca T este bijectiva si
T (a+ b) = T (a) + ϕ (b) , ∀a, b ∈ R,
T (a · b) = T (a) · ϕ (b) , ∀a, b ∈ R.
Deci T este izomorfism de corpuri, iar (R,+, ·) si (C0,+, ·) sunt corpuri izomorfe.Notam cu a := (a, 0) ∈ C0 si i := (0, 1) ∈ C. i se numeste unitatea imaginara.Folosind operatiile cu numere complexe, orice z = (a, b) ∈ C se poate scrie ca
(a, b) = (a, 0) + (0, b) = (a, 0) + (b, 0) · (0, 1) = a + bi.
Prin urmare, obtinem forma algebrica a numerelor complexe,
(a, b) = a+ bi, ∀a, b ∈ R.
1.1. Proprietati algebrice ale numerelor complexe. 1) i2 = (0, 1) · (0, 1) =(−1, 0) = −1;
2) z = Rez + Imz i;3) Pentru orice z = a+ bi ∈ C, Rez = z+z
2, Imz = z−z
2;
4) z ∈ R daca si numai daca Imz = 0;5) z ∈ R daca si numai daca z = z;6) z = 0 daca si numai daca Rez = Imz = 0;7) Oricare ar fi z1, z2 ∈ C, z1 + z2 = z1 + z2, z1 · z2 = z1 · z2 si, daca, z2 6= 0, z1
z2= z1
z2.
1

2
1.2. Reprezentarea geometrica a numerelor complexe. Orice numar complexpoate fi reprezentat printr-un singur punct ın plan (R2), numit imaginea acelui numar:daca z = a+ bi ∈ C, atunci imaginea sa geometrica este punctul M (a, b) .
Numerele din C0 se reprezinta pe axa absciselor, pe care-o numim axa reala. Nu-merele pur imaginare (i.e. cele cu Rez = 0) se reprezinta pe axa ordonatelor, pe care-onumim axa imaginara.
Reciproc, oricarui punct din plan ıi corespunde un unic numar complex, numit afixulacelui punct: daca M (a, b) este un punct ın planul R2, atunci z = a + bi este afixulpunctului M. Se mai noteaza M (z) .
Prin urmare, orice numar complex este unic reprezentat de un punct ın plan si reciproc.Din punct de vedere geometric, imaginea conjugatului este simetricul imaginii numarului
complex, fata de axa reala.
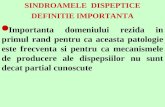
1.3. Reprezentarea trigonometrica a numerelor complexe. Fie z = a+ bi ∈ C
si M(z) punctul din plan de afix z. Vectorul−−→OM este unic determinat de lungimea sa r,
r :=√a2 + b2 =: |z| ,
numita si modulul numarului complex z si de unghiul orientat ϕ ∈ [0, 2π), facut cusensul pozitiv al axei Ox, numit si argumentul redus al lui z si notat cu arg z.
O a
bM(a, b)
|z|
ϕ x
y
Este evident,
a = |z| cosϕ si b = |z| sinϕ.
Prin urmare, obtinem forma trigonometrica a numarului complex z,
z = |z| (cosϕ+ i sinϕ) .

1. NUMERE COMPLEXE. PLANUL COMPLEX 3
Pentru arg z avem urmatoarea formula de calcul:
arg z =
arctg ba, daca a > 0, b ≥ 0,
arctg ba+ π, daca a > 0, b < 0,
arctg ba+ π, daca a < 0, b ≥ 0,
arctg ba+ 2π, daca a > 0, b < 0,
π/2, daca a = 0, b > 0,3π/2, daca a = 0, b < 0.
Numarului complex z = 0 nu i se asociaza niciun argument:
0 = |0| (cosϕ+ i sinϕ) , ∀ϕ ∈ [0, 2π).
Avem imediat ca z 6= 0 daca si numai daca |z| 6= 0.Multimea
Arg z := {arg z + 2kπ, k ∈ Z}se numeste multimea argumentelor lui z.
Se deduce rapid caarg z = 2π − arg z.
1.4. Operatii cu numere complexe scrise sub forma trigonometrica. Fie z =r (cosϕ+ i sinϕ) , z1 = r1 (cosϕ1 + i sinϕ1) , z2 = r2 (cosϕ2 + i sinϕ2) numere complexe,cu r2 6= 0. Atunci
z1 · z2 = r1r2 [cos (ϕ1 + ϕ2) + i sin (ϕ1 + ϕ2)] ,z1z2
=r1r2
[cos (ϕ1 − ϕ2) + i sin (ϕ1 − ϕ2)]
si (formula lui Moivre)
zn = rn [cos (nϕ) + i sin (nϕ)] , ∀n ∈ Z.
Radacinile de ordinul n ∈ N\ {0, 1} ale numarului complex z = r (cosϕ+ i sinϕ) ,ϕ ∈ [0, 2π), i.e. solutiile ecuatiei
un = z
sunt
uk =n
√
|z|(
cosϕ+ 2kπ
n+ i sin
ϕ+ 2kπ
n
)
, k ∈ {0, 1, ..., n− 1} .
Au loc urmatoarele proprietati:1) |z| ≥ 0, ∀z ∈ C si |z| = 0 daca si numai daca z = 0;2) |z1 · z2| = |z1| · |z2| , ∀z1, z2 ∈ C;3) (inegalitatea triunghiului) |z1 + z2| ≤ |z1|+ |z2| , ∀z1, z2 ∈ C;4) z · z = |z|2 , ∀z ∈ C;5) |Rez| ≤ |z| ≤ |Rez|+ |Imz| si |Imz| ≤ |z| ≤ |Rez| + |Imz| , ∀z ∈ C;6) |z1 · z2| = |z1| · |z2| , ∀z1, z2 ∈ C;7) |zn| = |z|n , ∀n ∈ N, ∀z ∈ C;
8)∣
∣
∣
z1z2
∣
∣
∣= |z1|
|z2|, ∀z1, z2 ∈ C, cu z2 6= 0;

4
1.5. Submultimi remarcabile ale planului complex. Semiplanul superior ınchis
este multimea
{z ∈ C, Imz ≥ 0} .Semiplanul superior deschis este multimea
{z ∈ C, Imz > 0} .Semiplanul inferior ınchis este multimea
{z ∈ C, Imz ≤ 0} .Semiplanul superior deschis este multimea
{z ∈ C, Imz < 0} .Semiplanul drept ınchis este multimea
{z ∈ C, Rez ≥ 0} .Semiplanul drept deschis este multimea
{z ∈ C, Rez > 0} .Semiplanul stang ınchis este multimea
{z ∈ C, Rez ≤ 0} .Semiplanul stang deschis este multimea
{z ∈ C, Rez < 0} .Pentru z0 ∈ C si R > 0, discul deschis cu centrul ın z0 de raza R este multimea
B (z0, R) := {z ∈ C, |z − z0| < R} ,discul ınchis cu centrul ın z0 de raza R este multimea
B (z0, R) := {z ∈ C, |z − z0| ≤ R} ,iar cercul cu centrul ın z0 de raza R este multimea
B (z0, R) := {z ∈ C, |z − z0| = R} .
1.6. Structura topologica a planului complex. Definim aplicatia d : C×C → R,
d (z1, z2) := |z1 − z2| , ∀z1, z2 ∈ C.
Se arata usor ca aceasta aplicatie este o metrica pe C. De fapt, aceasta este metricaobisnuita, euclidiana, deoarece, pentru z1 = x1 + iy1 si z2 = x2 + iy2,
|z1 − z2| =√
(x1 − x2)2 + (y1 − y2)
2.
Prin urmare, topologia planului complex coincide cu topologia planului real, R2.

1. NUMERE COMPLEXE. PLANUL COMPLEX 5
Definitie 1.3. Prin sir de numere complexe ıntelegem o functie z : N → C,z (n) = zn ∈ C, ∀n ∈ N.
zn se numeste termenul general sau de rang n al sirului.Sirul z se mai noteaza (zn)n∈N .
Observatie 1.1. In unele situatii, multimea de indici n poate fi o submultime a luiN, pentru care exista toti termenii zn.
Definitie 1.4. (zn)n∈N este marginit, daca exista M > 0, astfel ıncat |zn| ≤ M,
∀n ∈ N. In caz contrar, sirul se cheama nemarginit.
Cu alte cuvinte, un sir de numere complexe este marginit, daca toti termenii sai segasesc ıntr-un disc deschis (avand centrul ın origine).
Definitie 1.5. (zn)n∈N se numeste sir convergent, daca exista z ∈ C, astfel ıncat(zn)n∈N este convergent la z, adica ∃z ∈ C, ∀ε > 0, ∃Nε ∈ N, ∀n ≥ Nε,
|zn − z| < ε.
In caz contrar, sirul se numeste divergent.
Se poate arata, folosind inegalitatea triunghiului, ca daca z exista ca ın definitiaprecedenta, atunci el este unic. In aceasta situatie, z se numeste limita sirului zn si senoteaza
z := limn→∞
zn
sauzn → z.
Teorema 1.1. Sirul zn, cu zn = xn + yni, n ∈ N este convergent la z = x+ yi dacasi numai daca xn este convergent la x si yn este convergent la y.
Cu alte cuvinte, studiul convergentei sirurilor de numere complexe se realizeaza printrecere la componentele sale (sirurile partilor reale si imaginare).
Exemplu 1.1. Sirul zn =(
1 + 1n
)n+ (−1)n
ni, n ∈ N∗ este convergent la e+ i · 0 = e.
Teorema 1.2. Daca zn → z, atunci |zn| → |z| .Reciproca acestei teoreme este falsa. Intr-adevar, pentru zn = (−1)n , n ∈ N∗, sirul
modulelor este convergent la 1, ınsa (zn)n∈N∗ este divergent.
Insa, zn → 0 daca si numai daca z = 0.
Teorema 1.3. Daca |zn| → r si arg zn → ϕ, atunci zn → r (cosϕ+ i sinϕ) .
Reciproca acestei teoreme este falsa, dupa cum se poate observa prin considerarea
sirului zn = 1 + (−1)n
ni, n ∈ N∗.
Teorema 1.4. Daca (zn)n∈N , (wn)n∈N sunt convergente, atunci (αzn + βwn)n∈N esteconvergent, ∀α, β ∈ C si
limn→∞
(αzn + βwn) = α limn→∞
zn + β limn→∞
wn.

6
Exercitiu 1.1. Sirul (zn)n∈N este convergent doar pentru z = 1 si |z| < 1.
Definitie 1.6. Spunem ca (zn)n∈N are limita ∞, daca |zn| → ∞. In acest caz, notamzn → ∞.
Observatie 1.2. Daca (zn)n∈N admite un subsir (zkn)n∈N cu zkn → ∞, atunci (zn)n∈Neste nemarginit.
Teorema 1.5. Orice sir convergent este marginit.
Deci, pentru a arata ca un sir este divergent, este suficient sa demonstram ca estenemarginit.
Definitie 1.7. Sirul zn, n ∈ N se numeste sir Cauchy (fundamental), daca∀ε > 0, ∃Nε ∈ N, ∀n ≥ Nε, ∀p ∈ N,
|zn+p − zn| < ε.
Observatie 1.3. Pentru a arata ca un sir este Cauchy, este suficient sa aratam caexista un sir an → 0, astfel ıncat
|zn+p − zn| < an, ∀p ∈ N si ∀n ∈ N (sau de la un rang).
Teorema 1.6. (de completitudine a lui C) Un sir de numere complexe este convergentdaca si numai daca este Cauchy.
Deci, (C, d) este un spatiu metric complet, iar (C, |·|) este un spatiu Banach.
1.7. Exponentiala complexa. Consideram ın cele ce urmeaza sirul zn =(
1 + zn
)n,
n ≥ 1, unde z = x+ yi ∈ C este un numar oarecare.
Avem |zn| =∣
∣1 + zn
∣
∣
n=
(
(
1 + xn
)2+(
yn
)2)
n
2 → ex.
Apoi, ∀n ≥ 1,
arg zn =
{
arctg y/n1+x/n
, daca y ≥ 0,
arctg y/n1+x/n
+ 2π, daca y < 0.
Deci, ∀n ≥ 1,
zn =
|zn|(
cosn y/n1+x/n
+ i sinn y/n1+x/n
)
, daca y ≥ 0,
|zn|(
cos(
n y/n1+x/n
+ 2nπ)
+ i sin(
n y/n1+x/n
+ 2nπ))
, daca y < 0.
De aici se deduce rapid ca zn → ex (cos y + i sin y) .Retinem, asadar,
(1.1) limn→∞
(
1 +z
n
)n
= ex (cos y + i sin y) , ∀z = x+ iy ∈ C.
Plecand de la formula din analiza reala,
limn→∞
(
1 +z
n
)n
= ez, ∀z ∈ R,

1. NUMERE COMPLEXE. PLANUL COMPLEX 7
consideram prin extensie definitia lui
ez := limn→∞
(
1 +z
n
)n
, ∀z ∈ C.
Folosind aceasta definitie si relatia (1.1) , obtinem formula lui Euler
(1.2) ez = ex (cos y + i sin y) , ∀z = x+ iy ∈ C.
Urmatoarele proprietati ale exponentialei reale se pastreaza ın cazul complex:1) ez1 · ez2 = ez1+z2, ∀z1, z2 ∈ C;2) ez1
ez2= ez1−z2, ∀z1, z2 ∈ C;
3) e0 = 1.
In plus, e2πi = 1 si e2kπi = 1, ∀k ∈ Z. Prin urmare, ecuatia eu = 1 are o infinitate desolutii, spre deosebire de ecuatia similara din analiza reala, ce are o unica solutie, u = 0.
Pe de alta parte,
ez+2kπi = ez, ∀z ∈ C si ∀k ∈ Z,
de unde deducem ca functia exponentiala exp : C → C, exp (z) = ez, ∀z ∈ C esteperiodica.
1.8. Functiile sin, cos, sh, ch complexe. Folosind formula lui Euler, din eiθ =cos θ + i sin θ si e−iθ = cos θ − i sin θ, ∀θ ∈ R, deducem
cos θ =eiθ + e−iθ
2, sin θ =
eiθ − e−iθ
2i, ∀θ ∈ R.
Prin extensie la C, definim
cos z :=eiz + e−iz
2, sin z :=
eiz − e−iz
2i, ∀z ∈ C.
Apoi
tg z :=sin z
cos z, ∀z ∈ C\ {(2k + 1)π/2, k ∈ Z}
ctg z :=cos z
sin z∀z ∈ C\ {kπ, k ∈ Z} .
Apoi,
ch z :=ez + e−z
2, sh z :=
ez − e−z
2, ∀z ∈ C,
obtinand relatiile
sin iz = i sh z, cos iz = ch z, ∀z ∈ C.

8
1.9. Logaritmul complex. Sa consideram acum ecuatia eu = z, unde z ∈ C∗. Sedemonstreza, prin dubla incluziune egalitatea de multimi
{u ∈ C, eu = z} = {ln |z| + i arg z + 2kπi, k ∈ Z} .Prin urmare, putem defini logaritmul complex, ca functia log : C\ {0} → C,
log z := ln |z|+ i arg z
sau, considerand multimea tuturor argumentelor lui z, functia multivoca Log : C\ {0} →P (C) ,
Log z := ln |z|+ i Arg z.
1.10. Functia putere complexa. Definim, pentru α ∈ R∗ si z ∈ C∗,
zα := |z|α eiα arg z
si, ın particular, functia radical de ordinul n ≥ 2,
n
√z := n
√
|z|ei arg z
n .

Analiza complexaTema 1
1. Daca z = x + iy ∈ C, sa se determine partea reala si partea imaginarapentru:a) z = z
z−i, z = i;
b) 1z, z = 0;
c) zz+1
, z = −1;d) z
z, z = 0.
2. Determinati si apoi reprezentati ın plan multimile:a) {z ∈ C, |Imz| < 1} ;b) {z ∈ C, |z + i| ≤ 3} ;c) {z ∈ C, − 1 ≤ Rez < 3} ;d) {z ∈ C, 2 < |z − i| ≤ 3} ;e){z ∈ C∗, Im1
z= 4
};
f){z ∈ C∗, Re1
z= 1
}.
3. Determinati punctele din plan ın care functiile urmatoare sunt derivabile sideterminati-le derivatele, ın acele puncte:a) f : C → C, f (z) = |z| ;b) f : C → C, f (z) = |z|2 ;c) f : C → C, f (z) = z;d) f : C∗ → C, f (z) = 1
z;
e) f : C\{±i
√2}→ C, f (z) = z3 + 3z2 + z
z2+2+ (z + i) (z − 1) ;
f) f : C∗ → C, f (z) = z2 + z + z + 1z+ |z|2 .
4. Rezolvati ın C ecuatiile:
a) ez =√22+ i
√22;
b) sin z = 4;c) eiz = 3;d) cos z = 3+i
4;
e) tg z = 3i5;
e) sh z = i2;
f) ch z = 12.
5. Sa se determine functiile olomorfe, f , care au ca parte reala, u, sau parteimaginara, v, functiile:a) u : R2 → R, u (x, y) = x2 − y2;b) v : R2 → R, v (x, y) = x2 − y2 + y;c) u : R2 → R, u (x, y) = x2 − y2 + xy;d) v : R2 → R, v (x, y) = x3 + 6x2y − 3xy2 − 2y3 si f (0) = 0.
1
















Analiza complexaTema 2
1. Sa se demonstreze urmatoarele relatii:a) 1
4(ez + e−z + 2 cos z) =
∑∞n=0
z4n
(4n)!, ∀z ∈ C;
b) 13
(ez + 2e−
z2 cos z
√3
2
)=∑∞
n=0z3n
(3n)!, ∀z ∈ C.
2. Dezvoltati ın serii de puteri urmatoarele functii, indicand multimile deconvergenta:a) 1
(1−z)2; b) 1
(1−z2)2; c) 2
(1+z)3; d) 1
z2+1; e) 1
(z2+1)2; f) z2+4z4+z6
(1−z2)2; g) 1
(1−z6)3.
3. Pentru a, b ∈ R, gasiti primitivele urmatoarelor functii complexe:a) eaz, b) ch az; c) zeaz; d) eaz cos bz; e) cos az; f) z cos az; g) z2 ch az.
4. Calculati direct, folosind definitia, urmatoarele integrale complexe, pe dru-murile corespunzatoare, parcurse cate o data ın sens pozitiv:a)∮γ
zz+i
dz, unde γ este cercul cu centrul ın −i, de raza 3;
b)∮γ
dzz, unde γ este i) cercul cu centrul ın 0, de raza 3;
ii) cercul cu centrul ın 2i, de raza 1.c)∫γzdz, unde γ este semicercul superior cu centrul ın 0, de raza 1;
d)∮γz2dz, unde γ este cercul de ecuatie γ (t) = e2πit, t ∈ [0, 1] .
5. Determinati toate valorile posibile ale integralei complexe∮γ
dzz2+1
, unde γ
este un drum neted, simplu si ınchis, parcurs ın sens direct trigonometric, cenu trece prin punctele i sau −i.
6. Folosind formula integrala a lui Cauchy, calculati urmatoarele integralecomplexe, pe drumurile corespunzatoare, parcurse cate o data ın sens inversacelor de ceasornic:a)∮γ
sin zdzz+i
, γ (t) = −i+ 3e2πit, t ∈ [0, 1] ;
b)∮γ
dzz2+1
, γ (t) = 2e2πit, t ∈ [0, 1] ;
c)∮γ
ezdzz2−1
, γ (t) = 2e2πit, t ∈ [0, 1] ;
d)∮γ
cos zdzz2−π2 , γ (t) = 4e2πit, t ∈ [0, 1] ;
e)∮γ
cos zdz(z−i)3
, γ (t) = i+ e2πit, t ∈ [0, 1] ;
f)∮γ
dz(z+1)(z−1)3
, γ (t) = −1 + e2πit, t ∈ [0, 1] ;
g)∮γ
ezdzz(1−z)3
, unde i) γ (t) = 12e2πit, t ∈ [0, 1] ;
ii) γ (t) = 32e2πit, t ∈ [0, 1] ;
iii) γ (t) = 12+ 1
2e2πit, t ∈ [0, 1] .
7. Determinati zerourile si ordinele lor, pentru functiile:a) f (z) = sin z; b) f (z) = sin z − z; c) f (z) = cos z; d) f (z) = (z + 1)3 ; e)
f (z) = z (z − 1)2 ; f) f (z) = ez.
1


















z 2 z 2 4 2=>



n ! n=0


























Analiza complexaTema 3
1. Sa se dezvolte ın serie Laurent urmatoarele functii, ın domeniilescrise alaturat:a) f (z) = 1
(z−1)(z−2), (i) B (0, 1, 2) = {z ∈ C, 1 < |z| < 2} ;
(ii) B (1, 0, 1) = {z ∈ C, 0 < |z − 1| < 1} ;(iii) B (2, 0, 1) = {z ∈ C, 0 < |z − 2| < 1} ;(iv) B (0, 2,∞) = {z ∈ C, |z| > 2} ;b) f (z) = z4
(z−1)(z+3), (i) {z ∈ C, 1 < |z| < 3} ; (ii) {z ∈ C, 3 < |z|} ;
c) f (z) = z(z2+1)(z2+4)
, {z ∈ C, 1 < |z| < 2} ;d) f (z) = z2e
1z , (i) {z ∈ C, 0 < |z| < 1} ;
e) f (z) = ze1
z−1 , (i) {z ∈ C, 0 < |z − 1|} ; (ii) {z ∈ C, 1 < |z|} ;f) f (z) = z2 sin 1
z−1,(i) {z ∈ C, 0 < |z − 1|} ; (ii) {z ∈ C, 1 < |z|} .
2. Sa se dezvolte ın serie Laurent urmatoarele functii, ın jurul punctuluiz0, ın coroana circulara D (z0 si D sunt indicate alaturat):a) f (z) = 1
z(z−1), z0 = 1, D = {z ∈ C, 1 < |z − 1| < 2} ;
b) f (z) = 1(z−1)(z+4)
, z0 = 1, D = {z ∈ C, 1 < |z − 2| < 6} ;c) f (z) = 1
z(z+1)(z+2), z0 = 0, 3
2∈ D;
d) f (z) = 1z2(z2−9)
, z0 = 1, D = {z ∈ C, 1 < |z − 1| < 2} ;e) f (z) = 2z
z2−2i, z0 = 1, −1 ∈ D.
3. Pentru urmatoarele functii, sa se arate ca punctele z0, scrise alaturat,sunt puncte singulare aparente:a) f (z) = z3−1
z−1, z0 = 1; b) f (z) = sin z
z, z0 = 0;
c) f (z) = sh zz, z0 = 0; d) f (z) = 1−cos z
z2, z0 = 0;
e) f (z) = z2+1z4+2
, z0 = ∞.
4. Pentru urmatoarele functii, sa se arate ca punctele z0, scrise alaturat,sunt poli:a) f (z) = 1
z2+4, z0 = 2i; b) f (z) = z3
z+1, z0 = ∞;
c) f (z) = 1ez−1
, z0 = 0; d) f (z) = z(z−1)2
, z0 = 1.
5. Pentru urmatoarele functii, sa se arate ca punctele z0, scrise alaturat,sunt puncte singulare esentiale:a) f (z) = sin 1
z2, z0 = 0; b) f (z) = ez, z0 = ∞;
c) f (z) = cos z, z0 = ∞; d) f (z) = cos zz+2
, z0 = −2.
6. Pentru functiile urmatoare, sa se gaseasca punctele singulare izolatesi sa se precizeze natura lor:
1

2
a) f (z) = z+2z3+z
; b) f (z) = z4
z2+1; c) f (z) = z5
(z−3)3;
d) f (z) = 1(z−1)2(z2+4)
; e) f (z) = ez
z2; f) f (z) = ez
z2+1; g) f (z) = z2+1
ez;
h) f (z) = (z3 + 1) ez; i) f (z) = ez−1ez+1
; j) f (z) = z(1− e
1z
);
k) f (z) = 1z2(cos z+2)
; l) f (z) = zsin z
; m) f (z) = 1−cos zsin2 z
;
n) f (z) = e−z cos 1z; o) f (z) = sin
(e
1z
).
7. Sa se calculeze:a) Res
(sin2 zz5
, 0); b) Res
(e
1z , 0); c) Res
(ze
1z2 ,∞
);
d) Res(
ez
(z−1)3, 1); e) Res
(z cos π
z,∞); f) Res
(z2e
1z−2 , 2
).
8. Sa se determine reziduurile urmatoarelor functii, ın punctele singu-lare izolate, situate ın C:a) f (z) = z+1
z3−3z+2; b) f (z) = z3
z4+1; c) f (z) = z
(z+i)3;
d) f (z) = 1(z2+4)2
; e) f (z) = z2
(z2+3)(z−2)2;f) f (z) = 1
sin z; g) f (z) = 1
cos z;
h) f (z) = tg z; i) f (z) = z2+1ez+1
; j) f (z) = z(e
1z − 1
).
9. Sa se determine reziduurile urmatoarelor functii, ın punctul de la∞:a) f (z) = z3−1
z5+1; b) f (z) = sin z+3
z; c) f (z) =
sin 1z
z−1;
d) f (z) = 1z3(z9+2)
; e) f (z) = zz+2
e12z .
10. Sa se determine reziduurile urmatoarelor functii, ın toate punctelesingulare izolate:a) f (z) = 1
z5(z+3); b) f (z) = z6+1
z4(z+2); c) f (z) = z8+1
z4(z2+1);
d) f (z) = z2+z−1z2(z−1)
; e) f (z) = cos 1z+3
; f) f (z) = z3 cos 1z+1
;
g) f (z) = 1sin 1
z
; h) f (z) = ez
sin z.
11. Sa se calculeze urmatoarele integrale, pe drumurile γ specificatealaturat si parcurse ın sens pozitiv:a)∮γ
z3
z4−1dz, γ (t) = 2e2πit, t ∈ [0, 1] ;
b)∮γ
z3
z+1e
1z dz, γ (t) = 2e2πit, t ∈ [0, 1] ;
c)∮γ
zz+3
e13z dz, γ (t) = 4e2πit, t ∈ [0, 1] ;
d)∮γ
z cos zz+2
dz, γ (t) = −2 + 2e4πit, t ∈ [0, 1] ;
e)∮γ
z1−sin z
dz, γ (t) = 8e2πit, t ∈ [0, 1] ;

3
f)∮γ
z(1−cos z) sin z
dz, γ (t) = 5e2πit, t ∈ [0, 1] ;
g)∮γ
(1 + z)(e
1z + e
1z−1
)dz, γ (t) = 2e2πit, t ∈ [0, 1] .
*12. Sa se calculeze urmatoarele integrale:a)∫ 2π
0dx
5+3 cosx; b)
∫ π
−πdx
13+12 cosx; c)
∫ 2π
0cos4 x
1+sin2 xdx.
*13. Sa se calculeze urmatoarele integrale integrale:a)∫ +∞−∞
x2
(x2+4)(x2+9)dx; b)
∫ +∞−∞
x2
x4+x2+1dx; c)
∫ +∞−∞
x2+1x4+1
dx;
d)∫ +∞−∞
x3+1x6+1
dx; e)∫ +∞−∞
x4+1x6+1
dx; f)∫ +∞−∞
x2+1x4+4x2+13
dx;
g)∫ +∞−∞
1(x2+1)2
dx; h)∫ +∞−∞
1(x2+4)3
dx; i)∫ +∞−∞
1(x2+1)(x2+9)2
dx.
*14. Sa se calculeze urmatoarele integrale:
a)∫ +∞−∞
(x−2)e3ix
x2−4x+5dx; b)
∫ +∞−∞
(x−2) cos 3xx2−4x+5
dx; c)∫ +∞−∞
(x−2) sin 3xx2−4x+5
dx;
d)∫ +∞−∞
x cosxx2−4x+13
dx; e)∫ +∞−∞
x sinxx2−2x+17
dx.
*15. Sa se calculeze urmatoarele integrale:
a)∫ +∞−∞
(x+2)e−2ix
x2+4x+5dx; b)
∫ +∞−∞
e−ix
x4+8x2+16dx.
*16. Sa se calculeze urmatoarele integrale:a)∫ +∞0
dx(x+2)
√x; b)
∫ +∞0
dx(x−1)
√x;
c)∫ +∞0
dx(x2+1)
√x; d)
∫ +∞0
dx(x2+4) 3
√x.
*17. Sa se calculeze urmatoarele integrale:a)∫ +∞0
lnxx2+4
dx; b)∫ +∞0
lnx(x+2)2
dx;
c)∫ +∞0
lnxx2+x+1
dx; d)∫ +∞0
lnx(x2+4)2
dx.

1. Ecuatii diferentiale ordinare
1.1. Introducere. Multe probleme aplicative, provenind din inginerie, sti-inte fizice, stiinte sociale etc, prin formularea lor, cer sa se determine ofunctie care verifica o ecuatie ın care apare derivata unei functii necunoscute.Astfel de ecuatii poarta numele de ecuatii diferentiale.
Cel mai familiar exemplu de ecuatie diferentiala este legea lui Newton,
mx′′ = F, (1)
ın care functia necunoscuta este x = x (t), pozitia particulei de masa m,asupra careia actioneaza forta F . Pentru a afla miscarea particulei, estenecesar a se determina functia x = x (t), care satisface ecuatia (1) . DacaF = −mg, unde g reprezinta acceleratia gravitationala, atunci
mx′′ = −mg. (2)
Daca se integreaza ecuatia (2) ın raport cu variabila independenta, tem-porara, t, se obtine
x′ (t) = −gt+ c1, c1 ∈ R
si apoi, printr-o noua integrare ın raport cu t,
x (t) = −gt2
2+ c1t+ c2, c1, c2 ∈ R. (3)
Constantele arbitrare c1, c2 reale, din relatia (3) se pot determina deregula din conditii initiale date, cum ar fi pozitia si viteza x′ = x′ (t) aparticulei la un moment initial t0.
Functia necunoscuta poate depinde de o variabila sau de mai multe vari-abile independente, obtinand ın aceasta maniera o clasificare importanta aecuatiilor diferentiale.
In primul caz, aparand numai derivate ordinare ale functiei necunoscute,ecuatiile vor purta numele de ecuatii diferentiale ordinare. De acesttip este si ecuatia (2), care reprezinta legea lui Newton si ın care singuravariabila independenta este cea temporara, t.
In al doilea caz, derivatele cu care intervine ın ecuatie functia necunos-cuta, fiind derivate partiale, ecuatiile de acest tip se vor numi ecuatiidiferentiale cu derivate partiale. Exemplele reprezentative pentru acesttip sunt:
• Ecuatia lui Laplace (1749-1827),
∂2u
∂x2+
∂2u
∂y2= 0, u = u (x, y) ;
• Ecuatia caldurii,
α2∂2u
∂x2=
∂u
∂t, u = u (x, t) , α ∈ R+;
1

2
• Ecuatia undelor,
a2∂2u
∂x2=
∂2u
∂t2, u = u (x, t) , a ∈ R+.
Aici, α si a sunt niste constante specificate. Ecuatia lui Laplace, ecuatiacaldurii, ca si ecuatia undelor, provin dintr-o varietate semnificativa si im-portanta de probleme de teoria campurilor electrice si magnetice, elastici-tate, mecanica fluidelor etc.
In aceasta lucrare ne vom ocupa cu predilectie de primul caz de ecuatiidiferentiale, ecuatii diferentiale ordinare, pentru care vom folosi denumireaprescurtata de ecuatie diferentiala.
1.2. Notiuni de teoria ecuatiilor diferentiale. In acest paragraf vomprezenta principalele notiuni ale teoriei ecuatiilor diferentiale.
Definitie 1.2.1. Forma generala a unei ecuatii diferentiale este
F(t, x, x′, ..., x(n)
)= 0, (4)
unde t reprezinta variabila independenta, x este functia necunoscuta, iar
F : D ⊆ Rn+2 → R
este o functie reala pe domeniul D al spatiului euclidian n+2−dimensional,Rn+2.
Definitie 1.2.2. Se numeste ordin al unei ecuatii diferentiale, cel maimare ordin de derivare cu care apare functia necunoscuta ın ecuatia diferen-tiala.
Astfel, pentru ecuatia diferentiala scrisa sub forma generala (4), ordinuleste n, unde am presupus ca x este functie derivabila de n ori ın raport cuvariabila t.
Definitie 1.2.3. Functia x se numeste solutie a ecuatiei diferentiale (4)pe intervalul I real, daca, introdusa ın ecuatie, o transforma ın identitate,adica
F(t, x (t) , x′ (t) , ..., x(n) (t)
)= 0, (5)
pentru orice t ∈ I.Observatie 1.2.1. In definitia 1.2.3, intervalul I poate fi si nemarginit
la unul sau amandoua capetele; solutia este intrinsec legata de intervalulei de definitie. Pentru noi, solutiile ecuatiilor diferentiale au ca domenii dedefinitie intervale (deschise), iar cand afirmam ca o functie x = x (t) estesolutie a unei ecuatii diferentiale, trebuie precizat intervalul ei de definitie.Prin urmare, devine important a se face distinctia ıntre functia x si solutiax: cand functia are drept domeniu de definitie de diferite tipuri, solutiaare drept domeniu de definitie un interval. De asemenea, o functie poatecuprinde ın expresia ei mai multe solutii ale unei ecuatii diferentiale.

3
Definitie 1.2.4. Fie ∆ un domeniu din Rn+1 si f : ∆ → R o functiedata. Ecuatia diferentiala
x(n) = f(t, x, x′, ..., x(n−1)
)(6)
se numeste ecuatie diferentiala sub forma normala.Exemplu. Sa consideram ecuatia
x′ = −√
1− x2, (7)
care reprezinta o ecuatie diferentiala de ordinul ıntai, sub forma normala,cu
∆ = R× (−1, 1) .
Functia x (t) = cos t este solutie a ecuatiei (7). Intr-adevar, ınlocuind-oın (7) gasim
− sin t = − |sin t|
sau
sin t = |sin t| .
Aceasta functie este solutie pentru ecuatia (7) doar pe acele intervale pecare functia sin este pozitiva, adica pe intervale de forma (2kπ, π + 2kπ) ,k ∈ Z. Obtinem asadar o infinitate de solutii ale ecuatiei (7) .
Este evident ca orice ecuatie de forma (6) este de forma (4), cu
F (t, x0, x1, ..., xn) = xn − f (t, x0, x1, ..., xn−1) .
Reciproc ınsa nu este adevarat, adica nu orice ecuatie de forma generala(4) se poate aduce la forma normala (6), decat ın cazul ın care functia Fpermite explicitarea sa ın raport cu ultima variabila, xn.
De asemenea, se poate ıntampla si ca, rezolvand ecuatia
F (t, x0, x1, ..., xn) = 0,
ın raport cu xn, sa obtinem mai multe solutii, pe care, daca le vom nota cu
xn = fi (t, x0, ..., xn−1) , i ∈ 1, k,
vom obtine, corespunzator ecuatiei (4) , k ecuatii de forma normala,
x(n) = fi
(t, x, x′, ..., x(n−1)
), i ∈ 1, k.
De exemplu, considerand ecuatia(x′)3 − 2
(x′)2 − x′ + 2 = 0, (8)
rezulta ca ea reprezinta o ecuatie diferentiala de ordinul I, scrisa sub formagenerala (4), unde
F (t, x0, x1) = x31 − 2x21 − x1 + 2,

4
care are drept domeniu de definitie D = R3. Rezolvand ecuatia (8) ın raportcu derivata x′, rezulta trei ecuatii sub forma normala,
x′ = −1,x′ = 1,x′ = 2,
(9)
care au ca solutii respectiv functiile
x (t) = −t+ C1, C1 ∈ R,x (t) = t+ C2, C2 ∈ R,x (t) = 2t+ C3, C3 ∈ R.
Observatie 1.2.2. Daca ıntr-o ecuatie diferentiala, variabila indepen-denta nu apare, adica F sau f nu depinde de t, atunci ecuatia mai poartanumele de ecuatie autonoma. In caz contrar, ecuatia se numeste ecuatieneautonoma.
Definitie 1.2.5. Spunem ca functia φ = φ (t, u) este o solutie implicitaa ecuatiei diferentiale (4) daca exista un interval I si o functie x = x (t),definita pe acest interval, astfel ıncat x (t) sa satisfaca relatia
φ (t, x (t)) = 0, ∀ ∈ I. (10)
De remarcat este ca, pentru a afirma ca x = x (t) este solutie implicitapentru ecuatia (1.2.1) , trebuie ca ea sa fie solutie si sa verifice o ecuatieimplicita,
φ (t, x) = 0, (11)
care poate determina mai multe functii implicite x (t), care sa verifice relatia(10) .
Exemplu. Pentru ecuatia
x′ = − t
x, (12)
avem f (t, x) = − tx , f : ∆1 ∪∆2 → R, unde
∆1 = R× (0,+∞) , ∆2 = R× (−∞, 0) ,
iar functia
x2 + t2 = c2, c > 0 (13)
reprezinta, sub forma implicita, solutia ecuatiei (12), atat pe ∆1, cat si pe∆2.
Intr-adevar, ecuatia (13) are pe ∆1 solutia
x (x) =√
c2 − t2, cu t ∈ (−c, c)
si
x′ (t) = − t√c2 − t2
= − t
x (t),

5
iar pe ∆2 are solutia
x (t) = −√
c2 − t2, cu t ∈ (−c, c)
si
x′ (t) =t√
c2 − t2= − t
x (t).
Definitie 1.2.6. Fie(t0, x
00, x
01, ..., x
0n−1
)∈ ∆ un punct fixat arbitrar.
Consideram ecuatia (6), careia ıi atasam conditia
x (t0) = x00, x′ (t0) = x01, ..., x(n−1) (t0) = x0n−1, (14)
care se numeste conditie initiala.Sistemul format de ecuatia (6) si conditia initiala (13) poarta numele de
problema Cauchy.Conditia initiala semnifica faptul ca functia x (t), ımpreuna cu deriva-
tele ei de ordinul k ∈ 1, n− 1 au, ın punctul fixat t0, valorile date x00, x01, ...,
x0n−1. A rezolva problema Cauchy ınseamna a gasi o solutie a ecuatiei (6)care sa verifice conditia initiala (13).
Acelasi tip de relatii (13) se poate atasa ecuatiei diferentiale de forma
generala (4) , obtinand astfel tot o problema Cauchy. In continuare, ne vomocupa cu ecuatia sub forma normala (6), notiunile introduse adaptandu-seusor la cazul ecuatiei (41) .
Definitie 1.2.7. Fie C ⊂ Rn o multime, c = (c1, c2, ..., cn) ∈ C si∆ ⊂ Rn+1 domeniu, arbitrare.
Prin solutie generala a ecuatiei (6) ıntelegem o familie de functii x (t; c)cu proprietatile:
1) ∀ c ∈ C, functia x (t; c) reprezinta o solutie a ecuatiei (6) pe un intervalIc;
2) ∀(t0, x
00, ..., x
0n−1
)∈ ∆, ∃ un unic c0 ∈ C astfel ıncat functia x (t; c0)
sa fie o solutie a problemei Cauchy (6) + (14) .Altfel spus, solutie generala pe un domeniu ∆ este o familie de functii
ce depinde de n constante arbitrare, aceste functii sunt solutii ale ecuatiei(6) si, prin particularizarea constantelor c1, c2, ..., cn se poate obtine solutiaoricarei probleme Cauchy cu datele initiale
(t0, x
00, ..., x
0n−1
)∈ ∆.
Definitie 1.2.8. Orice solutie care se obtine din solutia generala prinparticularizarea constantelor se numeste solutie particulara.
Definitie 1.2.9. Orice solutie care nu se poate obtine din cea generalaprin particularizarea constantelor se numeste solutie singulara.
Exemplu. Sa consideram din nou ecuatia (7) :
x′ = −√
1− x2.
Afirmam ca familia de functii
x (t) = cos (t+ c) , c ∈ R (15)

6
reprezinta, pentru t ∈ Ic = (−c, π − c) , solutia generala a ecuatiei (7). Intr-adevar, fie t ∈ (−c, π − c) . Atunci t+ c ∈ (0, π) si
x′ (t) = − sin (t+ c) = −√
1− cos2 (t+ c) =
= −√1− x2, ∀c ∈ R.
Fie acum (t0, x0) ∈ ∆ = R× (−1, 1). Ecuatia
cos (t0 + c) = x0
are ca solutie
c0 = arccosx0 − t0
si deci functia
x (t) = cos (t+ arccosx0 − t0)
este solutie unica a ecuatiei (7), care verifica relatia
x (t0) = x0.
O solutie particulara a ecuatiei (7) se poate determina din solutia generalacos (t+ c) prin considerarea valorii 0 pentru constanta c, gasind functia cos t,pe intervalul I0 = (0, π) .
Este evident ca functiile
x1 (t) = 1, x2 (t) = −1, t ∈ R (16)
sunt solutii pentru ecuatia (7) care nu se pot obtine din solutia generala prinparticularizarea constantei c. Ele sunt deci solutii singulare.
Sa remarcam faptul ca pentru fiecare c, functia x data de (15) verificaecuatia si ın capetele intervalului Ic; dar aceste capete apartin solutiilorsingulare (16) . Deci, prin orice punct al unei solutii singulare trec cel putindoua solutii, pe cand prin punctele interioare lui ∆ trece una singura.
2. Tipuri de ecuatii de ordinul ıntai
2.1. Ecuatii cu diferentiale totale exacte. Ecuatiile diferentiale de or-dinul ıntai se exprima printr-o forma mai generala fata de (4) si (6), tinandcont de faptul ca, ın ipoteze mai largi, derivata se exprima astfel:
x′ =dx
dt. (17)
Aceste ecuatii au, ın cazul ecuatiilor de ordinul ıntai, formele
F(t, x, x′
)= 0
si, respectiv,
x′ = f (t, x) .
Inlocuind ın aceasta ultima ecuatie scrisa normal, x′ data de relatia (17),gasim forma
h1 (t, x) dt+ h2 (t, x) dx = 0. (18)

7
Definitie 2.1.1. Vom spune ca ecuatia (18) este o ecuatie cu diferentialatotala exacta, daca membrul stang al acestei ecuatii este o diferentiala to-tala exacta, adica, presupunand h1, h2 : D → R∗, unde D ⊆ R2 este undomeniu, exista o functie φ : D → R astfel ıncat
dφ = h1dt+ h2dx. (19)
Functia φ se numeste primitiva (solutie) a ecuatiei (18).Din relatia (19) rezulta ca pe D avem
h1 =∂φ
∂t, h2 =
∂φ
∂x. (20)
Observatie 2.1.1. Functiile h1 si h2 sunt considerate definite pe undomeniu (adica multime deschisa si conexa), pentru a putea beneficia deproprietatea ca pe o multime conexa, doua functii ce au aceeasi diferentiala,difera printr-o constanta aditiva.
Deoarece D este o multime conexa, orice doua primitive ale ecuatiei (18)difera printr-o constanta aditiva.
Teorema 2.1.1. Daca exista ∂h1∂x si ∂h2
∂t si daca sunt continue pe D,atunci ecuatia (18) este cu diferentiala totala exacta daca si numai daca areloc relatia
∂h1∂x
(t, x) =∂h2∂t
(t, x) , ∀ (t, x) ∈ D. (21)
Una dintre formulele care ne da primitiva ecuatiei cu diferentiala totalaexacta (2.1.2) este
φ (t, x) =
∫ t
t0
h1 (s, x0) ds+
∫ x
x0
h2 (t, s) ds, ∀ (t0x0) ∈ D. (22)
Sa remarcam faptul ca (t0, x0) sunt arbitrare; daca luam alt punct initial,atunci ın expresia primitivei (22) apare o constanta aditiva. De obicei,alegem constantele (t0, x0) astfel ıncat calculul integralelor sa fie cat maisimplu.
Teorema 2.1.2 (de existenta si unicitate).
a). Presupunem ca ecuatia (18) este cu diferentiala totala exacta pedomeniul D;
b). h1 si h2 sunt continue pe D;c). h2 (t, x) = 0, pentru orice (t, x) ∈ D.
Atunci ecuatia (18) cu conditia initiala x (t0) = x0 are solutie unica.Demonstratie. Fie φ = φ (t, x) o primitiva a diferentialei totale exacte
h1dt+ h2dx si consideram functia F : D → R definita prin
F (t, x) := φ (t, x)− φ (t0, x0) , ∀ (t, x) ∈ D. (23)
Vrem sa demonstram ca egalitatea
F (t, x) = 0 (24)
reprezinta, sub forma implicita, o solutie a problemei (18) cu conditia initialax (t0) = x0.

8
Vom aplica teorema functiilor implicte functiei F . Trebuie remarcat cafunctia F satisface proprietatile:
10. F (t0, x0) = 0, ceea ce este evident adevarata, din definitia functieiF ;
20. exista ∂F∂t = ∂φ
∂t = h1 si ∂F∂x = ∂φ
∂x = h2 si sunt continue, fapt carerezulta din ipoteza b);
30. ∂F∂x = 0 pe domeniul D, proprietate care urmeaza din ipoteza c).
Rezulta, aplicand teorema functiilor implicite, ca exista o functie unicax = x (t), definita ıntr-o vecinatate V a punctului t0, care satisface urmatoareletrei proprietati:
(1) x (t0) = x0;(2) F (t, x (t)) = 0, (∀) t ∈ V ;
(3) x′ (t) = −∂F∂t
(t,x(t))∂F∂x
(t,x(t)), (∀) t ∈ V.
Demonstram ca x = x (t) este solutie a ecuatiei diferentiale (18) .Din concluzia 3. rezulta ca
∂F
∂t=
∂φ
∂t= h1,
∂F
∂x=
∂φ
∂x= h2
si astfel obtinem
h1 (t, x (t)) + h2 (t, x (t))x′ (t) = 0.
Inlocuind x′ = dxdt , gasim ca functia x = x (t) satisface ecuatia (18) si
conditia initiala x (t0) = x0. Deci, avem asigurata existenta solutiei.
Aratam acum ca solutia este si unica. Intr-adevar, presupunand prin re-ducere la absurd ca ar exista doua solutii, atunci, urmand un rationamentasemanator (de la sfarsit spre ınceput), am deduce ca ecuatia (24) ar aveadoua solutii, ceea ce contrazice unicitatea din teorema de existenta a functiilorimplicite. �
Observatie 2.1.2. Solutia este data sub forma implicita si ea poate fiexprimata, tinand cont de expresia primitivei mentionate mai ınainte, siintroducand functia
H (t, x) =
∫ t
t0
h1 (s, x0) ds+
∫ x
x0
h2 (t, s) ds,
sub forma
H (t, x) = 0, (25)
care reprezinta solutia unica a problemei (18) cu conditia initiala x (t0) = x0.Observatie 2.1.3. Teorema 2.1.2 are un profund caracter local, deoarece
ne asigura existenta si unicitatea solutiei ıntr-o vecinatate a punctului t0,fara a preciza ınsa cat de mare este aceasta vecinatate, V .
Observatie 2.1.4. Solutia generala a ecuatiei 18 este∫ t
t0
h1 (s, x0) ds+
∫ x
x0
h2 (t, s) ds = C, C ∈ R, (26)

9
unde t0, x0 ∈ R sunt arbitrare.Observatie 2.1.5. Daca ın domeniul D nu avem satisfacuta ipoteza c) a
Teoremei 2.1.2, dar avem relatia h1 (t, x) = 0, ∀ (t, x) ∈ D, atunci se poatedemonstra o teorema similara Teoremei 2.1.2, ın care rolurile variabilelor xsi t se schimba.
Exemplu.Sa consideram ecuatia
(1 + tx) dt+t2
2dx = 0. (27)
Din forma ecuatiei rezulta h1, h2 : D = R2 → R, h1 (t, x) = 1 + tx,
h2 (t, x) =t2
2 , ∀ (t, x) ∈ R2 si fie (t0, x0) ∈ D constant, arbitrar.Avem
∂h1∂x
=∂h2∂t
= t.
Conform Teoremei 2.1.1, ecuatia (27) este cu diferentiala totala exacta.Fie (t0, x0) ∈ R2 arbitrare. Solutia este∫ t
t0
(1 + sx0) ds+
∫ x
x0
t2
2ds = C, C ∈ R
sau
t− t0 + x0
(t2
2− t20
2
)+
t2
2(x− x0) = C, C ∈ R.
Din caracterul arbitrar al lui t0 si x0 obtinem ca solutia se scrie
t+t2x
2= C, C ∈ R.
Punand conditia initiala, de exemplu x (0) = 1, gasim C = 0 si deci unicasolutie a ecuatiei (27) cu conditia initiala x (0) = 1 este
t+t2x
2= 0.
Exercitii.Verificati daca urmatoarele ecuatii diferentiale sunt cu diferentiale totale
exacte si, ın caz afirmativ, sa se rezolve:
(1) (2t+ 3) dt+ (2x− 2) dx = 0;(2) (2t+ 4x) dt+ (2t− 2x) dx = 0;(3)
(9t2 + x− 1
)dt+ (t− 4x) dx = 0;
(4)(2tx2 + 2x
)dt+
(2t2x+ 2t
)dx = 0;
(5) dxdt = −at+bx
bt+cx ;
(6) dxdt = −at−bx
bt−cx ;
(7)(et sinx− 2x sin t
)dt+
(et cosx+ 2 cos t
)dx = 0;
(8)(et sinx+ 3x
)dt−
(3t− et sinx
)dx = 0;
(9)(xetx cos 2t− 2etx sin 2t+ 2t
)dt+
(tetx cos 2x− 3
)dx = 0;
(10)(xt + 6t
)dt+ (ln t− 2) dx = 0;

10
(11) (t lnx+ tx) dt+ (x ln t+ tx) dx = 0;(12) tdt
(t2+x2)32+ xdx
(t2+x2)32= 0;
(13) (2t+ 3t2x)dt+ (t3 − 3x2)dx = 0.
Solutii.Pentru a vedea daca ecuatiile sunt sau nu cu diferentiala totala exacta,
verificam relatia (21).
(1) t2 + 3t+ x2 − 2x = C, C ∈ R;(2) Nu este ecuatie cu diferentiala totala exacta;(3) 3t3 + tx− t− 2x2 = C, C ∈ R;(4) t2x2 + 2tx = C, C ∈ R;(5) at2 + 2btx+ cx2 = C, C ∈ R;(6) Nu este ecuatie cu diferentiala totala exacta;(7) et sinx+ 2x cos t = C, C ∈ R;(8) Nu este ecuatie cu diferentiala totala exacta;(9) etx cos 2t+ t2 − 3x = C, C ∈ R;(10) x ln t+ 3t2 − 2x = C, C ∈ R;(11) Nu este ecuatie cu diferentiala totala exacta;(12) t2 + x2 = C, C ∈ R;(13) t2 + t3x− x3 = C, C ∈ R.
2.2. Ecuatii cu variabile separabile. Aceste ecuatii sunt de forma
x′ = p (t) q (x) , (28)
unde p : (a, b) → R, q : (c, d) → R∗ sunt continue. Intervalele (a, b) si (c, d)pot fi si nemarginite. Sa remarcam faptul ca functia q pastreaza un semnconstant pe intervalul (c, d), deoarece este continua si nu se anuleaza.
Inlocuind x′ = dxdt , rezulta ca ecuatia (28) se scrie sub forma
dx
q (x)− p (t) dt = 0, (29)
despre care spunem ca este relatia ın care variabilele s-au separat si careeste o ecuatie cu diferentiala totala exacta. Intr-adevar, avem
∂(
1q(x)
)∂t
=∂ (−p (t))
∂x= 0.
Asociem ecuatiei (28) conditia initiala
x (t0) = x0, (30)
unde (t0, x0) ∈ (a, b)× (c, d) .Astfel, bazandu-ne pe Teorema 2.1.2, putem enunta si demonstra urmatoarea
teorema.Teorema 2.2.1. Presupunem ca functiile p si q satisfac conditiile:1) p este continua pe intervalul (a, b) ;2) q este continua pe intervalul (c, d) si nu se anuleaza nicaieri ın acest
interval.

11
Atunci problema Cauchy (28) + (30) admite o solutie unica, oricare ar fi(t0, x0) ∈ (a, b)× (c, d) .
Demonstratie. Este clar ca functiile p si q satisfac ipotezele Teoremei2.1.2, pe dreptunghiul D := (a, b)× (c, d) , de unde va rezulta ca functia
H (t, x) :=
∫ t
t0
p (s) ds−∫ x
x0
du
q (u)
genereaza solutia unica a problemei (28) + (30), sub forma implicita,
H (t, x) = 0
sau, echivalent, ∫ t
t0
p (s) ds =
∫ x
x0
du
q (u). (31)
Daca x (t) este solutie a ecuatiei (28) atunci, evident,∫ t
t0
p (s) ds =
∫ x(t)
x0
du
q (u),∀t ∈ (a, b) (32)
unde t0 ∈ (a, b) este un punct arbitrar si x0 = x (t0) .Definim functia Q : (c, d) → R, prin
Q (y) =
∫ y
x0
du
q (u), ∀y ∈ (c, d) .
Datorita ipotezelor ın care lucram, Q este o functie derivabila (cu derivatacontinua) pe intervalul (c, d) si strict monotona (strict crescatoare daca q >0 pe (c, d) si strict descrescatoare daca q < 0 pe (c, d)). Prin urmare,putem vorbi de inversa Q−1, definita pe multimea Q ((c, d)) , inversa careare aceleasi proprietati ca functia Q. Deoarece relatia (32) se mai scrie
Q (x (t)) =
∫ t
t0
p (s) ds, ∀t ∈ (a, b) , (33)
rezulta ca solutia x are expresia
x (t) = Q−1
(∫ t
t0
p (s) ds
), ∀t ∈ (a, b) . (34)
Reciproc, o functie x = x (t) definita de relatia (34) (unde x0 este arbitrar
ın (c, d) si t parcurge o vecinatate a punctului t0, astfel ıncat∫ tt0p (s) ds
apartine domeniului functiei Q−1) este solutie pentru ecuatia (28), verificandın plus conditia Cauchy x (t0) = x0.
Exemple.1. Sa se integreze ecuatia diferentiala cu variabile separabile
x′ = 2t(1 + x2
).
Solutie. Ecuatia data se mai scrie
dx
1 + x2= 2tdt,

12
deci, cu notatiile de mai sus, avem p, q : R → R, p (t) = 2t, q (x) = 1+x2 > 0.Orice solutie a ecuatiei date verifica pe intervalul sau de existenta relatia
(obtinuta prin separarea variabilelor si integrarea ıntr-un domeniu D ⊂ R2
care nu contine axa Ot (x = 0),∫ x
x0
du
1 + u2= 2
∫ t
t0
sds, t0, x0 ∈ R
sau
arctg x = t2 + C, C ∈ Rsau
x = tg(t2 + C
), C ∈ R. (35)
Reciproc, orice functie de forma (235), definita pe un interval pe careaceasta functie are sens, este solutie pentru ecuatia data.
2. Sa se integreze ecuatia diferentiala cu variabile separabile(t2 − 1
)x′ + 2tx2 = 0.
Solutie. Consideram ecuatia (formal echivalenta cu cea data)
x′ = − 2t
t2 − 1x2. (36)
Deoarece expresia p (t) = − 2tt2−1
nu are sens pentru t = −1 si t = 1,
iar q (x) = x2 se anuleaza ın x = 0, ar trebui sa consideram, conform
discutiei teoretice, sase cazuri distincte. Insa, cum expresiile primitivelorraman aceleasi ın toate cazurile, se pot rezolva simultan toate cele sasecazuri:
dx
x2= − 2tdt
t2 − 1,
care implica ∫dx
x2= −
∫2tdt
t2 − 1.
Asadar,
1
x= ln
∣∣t2 − 1∣∣+ C, C ∈ R
sau
x = x (t, C) =1
ln |t2 − 1|+ C, C ∈ R,
pentru orice t ∈ R, pentru care x (t) are sens. Restrictiile functiilor t →x (t, C), C ∈ R, la intervalele care alcatuiesc multimile lor de definitie consti-tuie solutii pentru (2.2.9) , deci si pentru ecuatia initiala. De exemplu, pen-
tru C < 0, restrictiile functiilor t → x (t, C) la intervalele(−∞,−
(1 + e−C
) 12
),(
−(1 + e−C
) 12 ,−1
), (−1, 1) ,
(1,(1 + e−C
) 12
),((
1 + e−C) 1
2 ,+∞)
sunt
solutii. In ecuatia initiala nu apar discontinuitatile t = −1 si t = 1. De aceea

13
suntem tentati sa prelungim prin continuitate solutiile x (t, C) , atribuindu-le valoarea 0 ın t = −1 si ın t = 1. Acest lucru nu este ınsa posibil, deoareceextensiile obtinute nu sunt functii derivabile (nici macar lateral) ın t = −1si t = 1.
In general, ın cele ce vor urma, vom evita asemenea discutii amanuntite.Astfel, ın cazul de fata putem scrie simplu ca
x (t) =1
ln |t2 − 1|+ C, C ∈ R
este solutia generala a ecuatiei date. De asemenea, multimea solutiilorcontine si solutia banala, x ≡ 0, pe care am omis-o prin ımpartire.
3. Sa se integreze ecuatia diferentiala cu variabile separabile
txdt+ (2t− 1) dx = 0.
Solutie. A integra o asemenea ecuatie ınseamna a gasi atat functiilex = x (t), cat si functiile t = t (x) care satisfac ecuatia data.
Separand variabilele, obtinem
dx
x= − t
2t− 1dt, (37)
care este doar formal echivalenta cu ecuatia data. Intr-adevar, x (t) = 0,∀t ∈ R si t (x) = 1
2 , ∀x ∈ R sunt solutii pentru ecuatia initiala, fara a fisolutii pentru ecuatia (37) .
Integrand (37), rezulta
ln |x| et2 |2t− 1|
14 = C1, C1 ∈ R
sau
xet2 |2t− 1|
14 = C, C ∈ R\ {0} .
In concluzie, ecuatia data are solutiile
xet2 |2t− 1|
14 = C, C ∈ R,
deoarece cele doua solutii particulare indicate mai sus corespund cazuluiC = 0.
4. Sa se integreze ecuatia diferentiala
x′ = (x− t)2 + 1.
Solutie. Cu substitutia y = x−t, se obtine ecuatia cu variabile separabiley′ = y2. Rezolvand aceasta ecuatie si revenind la substitutia efectuata, gasimsolutiile
x (t) = t+1
C − t, C ∈ R

14
si
x = t.
5. Sa se integreze problema Cauchy{x′ = 1 + x2
x (0) = 1.
Solutie. Ecuatia este cu variabile separabile si deducem, dupa separareavariabilelor si integrare, ∫ x
1
du
1 + u2=
∫ t
0ds
sau
arctg x− π
4= t, t ∈
(−3π
4,π
4
).
Rezulta ca solutia problemei Cauchy este
x (t) = tg(t+
π
4
), t ∈
(−3π
4,π
4
).
Exercitii.Sa se rezolve urmatoarele ecuatii cu variabile separabile sau probleme
Cauchy:
(1) tx′ = x3 + x;(2) x′ tg t− x = 0;(3) x− tx′ = a
(1 + t2x′
), a ∈ R;
(4) t2 (x+ 1) dt+(t3 − 1
)(x− 1) dx = 0;
(5) xdx = (tdx+ xdt)√1 + x2;
(6) txdt+ (t+ 1) dx = 0;(7) x′ ctg t+ x = 2;(8) x′ = 10t+x;(9) x′ = cos (x− t) ;(10) tx′ = x cos ln x
t ;(11) tx′ − x = t tg x
t ;
(12) x2 + t2x′ = txx′;
(13)
{ (1 + et
)xx′ − et = 0
x (0) = 1;
(14)
{ (tx2 + t
)dt+
(t2x− x
)dx = 0
x (0) = 1;
(15)
{x′ sin t− x lnx = 0x(π2
)= 1
.
Solutii.
(1) t√1 + x2 − Cx = 0, C ∈ R, x = 0;
(2) x = C sin t, C ∈ R;(3) x− a = Ct
1+at , C ∈ R;

15
(4) 3x+ ln|t3−1|(x+1)6
= C, C ∈ R;
(5)√1 + x2 = tx+ C, C ∈ R;
(6) ln∣∣∣ Cxt+1
∣∣∣ = −t, C ∈ R;(7) (2− x) cos t = C, C ∈ R;(8) 10t + 10−x = C, C ∈ R;(9) x− t
not= y; t = ctg x−t
2 + C, C ∈ R;
(10) xtnot= y; ln |t| = 2 ctg
ln xt
2 + C, C ∈ R;
(11) xtnot= y; sin x
t = Ct, C ∈ R;
(12) xtnot= y; x = Ce
xt , C ∈ R;
(13) 2et2
2 =√e(1 + et
);
(14) 1 + x2 = 21−t2
;
(15) x = 1.
2.3. Factor integrant. Vom arata ca metoda prezentata ın cadrul sectiunii2.2 se poate extinde la o clasa mai mare de probleme.
Consideram ecuatia diferentiala scrisa sub forma
P (t, x) dt+Q (t, x) dx = 0, (38)
care se presupune ca nu este cu diferentiala totala exacta pe domeniu D. Inaceasta situatie ıncercam sa gasim o functie µ nenula, care va purta numelede factor integrant pe domeniul D, astfel ıncat ecuatia
µPdt+ µQdx = 0 (39)
sa fie cu diferentiala totala exacta. Altfel spus, multiplicand printr-o functieµ, gasita corespunzator, ıncercam sa transformam ecuatia originala ıntr-unaechivalenta, care sa aiba proprietatea de a fi cu diferentiala totala exacta.
Reamintim ca ecuatia (39) este cu diferentiala totala exacta daca si numaidaca pe domeniul D are loc relatia
∂ (µP )
∂x=
∂ (µQ)
∂t. (40)
Aceasta relatie ne va da functia necunoscuta µ. Cum P si Q sunt functiicunoscute, factorul integrant µ trebuie sa satisfaca ecuatia diferentiala
P∂µ
∂x−Q
∂µ
∂t+ µ
(∂P
∂x− ∂Q
∂t
)= 0. (41)
Daca este posibila aflarea unei functii µ = µ (t, x) care sa verifice relatia
(41), atunci (39) va fi cu diferentiala totala exacta. In continuare, solutiaecutiei (39) se poate determina cu ajutorul functiei H, prin metoda prezen-tata ın Sectiunea 2.1 si va fi data implicit prin relatia
H (t, x) = C, C ∈ R. (42)

16
Solutia (42) este solutie a ecuatiei (38), deoarece prin ınmultirea ei cu unfactor nenul, ecuatia (38) se transforma ıntr-o ecuatie echivalenta, adica oecuatie cu aceleasi solutii.
De remarcat este ca relatia (41) este ın fond o ecuatie cu derivate partiale,care, ın general, se rezolva destul de greu. Daca aceasta ecuatie se poaterezolva, ea va avea mai multe solutii; pentru noi, va fi suficienta una dintreele, pe care o vom alege, evident, de cea ma simpla forma. In aplicatiise cauta factori integranti de o forma particulara, ca de exemplu de formaµ (t) , µ (x), µ (t+ x) , µ (tx) , µ
(t2 + x2
)etc si se pot determina conditii
necesare si suficiente pentru ca ecuatia (38) sa admita un factor integrantde o forma specificata.
De exemplu, daca ω : D → R, ω = ω (t, x) este o functie de clasa C1 pedomeniul D si P ∂ω
∂x −Q∂ω∂t = 0, pe D, atunci conditia necesara si suficienta
pentru ca ecuatia (38) sa admita un factor integrant pe domeniulD de formaµ = µ (ω) este ca expresia
∂P∂x − ∂Q
∂t
P ∂ω∂x −Q∂ω
∂t
sa fie functie doar de ω pe domeniul D.Exemplu.Consideram ecuatia (
t−√
t2 + x2)dt+ xdx = 0.
Sa se demonstreze ca aceasta ecuatie admite un factor integrant de forma
µ = µ(√
t2 + x2), sa se determine un factor integrant si apoi sa se rezolve
ecuatia.Solutie. Avem
P (t, x) = t−√
t2 + x2,∂P
∂x= − x√
t2 + x2,
Q (t, x) = x,∂Q
∂t= 0,
ω (t, x) =√
t2 + x2,∂ω
∂x=
x√t2 + x2
,∂ω
∂t=
t√t2 + x2
.
Rezulta ca ecuatia data admite un factor integrant de forma µ = µ (ω) =
µ(√
t2 + x2).
Pentru a determina efectiv o functie µ, factor integrant, punem conditia(2.3.4) si gasim
Pµ′ (ω)∂ω
∂x−Qµ′ (ω)
∂ω
∂t+ µ (ω)
(∂P
∂x− ∂Q
∂t
)= 0
sau
µ′ (ω) (−x) = µ (ω)x√
t2 + x2,

17
de unde obtinem ecuatia cu variabile separabile
µ′ = −µ
ω;
rezolvand-o, rezulta o solutie µ (ω) = 1ω .
Trecem acum la rezolvarea ecuatiei date. Amplificand-o cu 1ω , gasim
ecuatia cu diferentiala totala exacta,(t√
t2 + x2− 1
)dt+
x√t2 + x2
dx = 0,
pe care, daca o integram, gasim solutia√t2 + x2 − t = C, C ∈ R.
Exercitii.
(1) Aratati ca daca functiile ∂P∂x si ∂Q
∂t sunt continue pe domeniul D siQ = 0 pe D, atunci conditia necesara si suficienta pentru ca ecuatia(38) sa admita un factor integrant pe domeniul D de forma µ = µ (t)este ca expresia
∂P∂x − ∂Q
∂t
Q
sa fie functie doar de t pe domeniul D.(2) Aratati ca daca functiile ∂P
∂x si ∂Q∂t sunt continue pe domeniul D si
P = 0 pe D, atunci conditia necesara si suficienta pentru ca ecuatia(38) sa admita un factor integrant pe domeniul D de forma µ = µ (x)este ca expresia
∂P∂x − ∂Q
∂t
P
sa fie functie doar de x pe domeniul D.(3) Aratati ca daca functiile ∂P
∂x si ∂Q∂t sunt continue pe domeniul D si
tP − xQ = 0 pe D, atunci conditia necesara si suficienta pentru caecuatia (38) sa admita un factor integrant pe domeniul D de formaµ = µ (tx) este ca expresia
∂P∂x − ∂Q
∂t
tP − xQ
sa fie functie doar de tx pe domeniul D.(4) Demonstrati ca ecuatiile urmatoare nu sunt cu diferentiala totala
exacta, admit un factor integrant de forma specificata alaturat, sa sedetermine un astfel de factor integrant si apoi sa se rezolve ecuatiile:(a) t2x3dt+ t
(1 + x2
)dx = 0, µ = µ
(1tx3
);
(b)(sinxx − 2e−t sin t
)dt+ cosx+2e−t cos t
x dx = 0, µ = µ(xet);
(c) xdt+ (2t− xex) dx = 0, µ = µ (x) ;
(d)(3tx+ x2
)dt+
(t2 + tx
)dx = 0, µ = µ
(1
tx(2t+x)
);

18
(e)(2tx+ t2x+ x3
3
)dt+
(t2 + x2
)dx = 0, µ = µ (t) ;
(f)(1− t2x
)dt+ t2 (x− t) dx = 0, µ = µ (t) ;
(g) 2tx lnxdt+(t2 + x2
√1 + x2
)dx = 0, µ = µ (x) ;
(h)(t3x2 + x
)dt+
(t2x3 + t
)dx = 0, µ = µ (tx) ;
(i) tx2dt+(t2x− t
)dx = 0, µ = µ (tx) ;
(j)(3t+ 2x+ x2
)dt+
(t+ 4tx+ 5x2
)dx = 0, µ = µ
(t+ x2
);
(k) (t− tx) dt+(x+ t2
)dx = 0, µ = µ
(t2 + x2
);
(l)(t2 + x2 + 1
)dt− 2txdx = 0, µ = µ
(x2 − t2
).
Solutii.4.(a) t2 + 2 ln |x| − 1
x2 = C, C ∈ R;(b) et sinx+ 2x cos t = C, C ∈ R;(c) tx2 −
(x2 − 2x+ 2
)ex = C, C ∈ R;
(d) ln |t|+ ln√
|x|+ ln√
|x+ 2t| = C, C ∈ R;(e) etx
(t2 + 1
3x2)= C, C ∈ R;
(f) tx2 − 2t2x− 2 = Ct, C ∈ R;(g) t2 ln |x|+ 1
3
(x2 + 1
) 32 = C, C ∈ R;
(h) t2
2 − 1tx + x2
2 = C, C ∈ R;(i) tx− ln |x| = C, C ∈ R;(j) (t+ x)
(t+ x2
)2= C, C ∈ R;
(k) t−x2
(t+x2)2= C, C ∈ R;
(l) 1+x2−t2
t = C, C ∈ R.
2.4. Ecuatii omogene. Definitie 2.1.4. Spunem ca ecuatia diferentialax′ = f (t, x) este omoge- na (pentru t = 0 si ıntr-un domeniu D din planultOx cuprins ıntre dreptele x = at si x = bt, cu a < b, functia f fiindcontinua pe intervalul (a, b)), daca ea se poate aduce la forma
x′ = f(xt
), (43)
unde membrul al doilea este o functie de xt ; sau daca functia f este o functie
omogena (de grad 0), i.e.
f (λt, λx) = f (t, x) , ∀ (t, x) ∈ D, ∀λ ∈ R.
Daca ın aceasta ultima egalitate luam λ = 1t , obtinem
f (t, x) = f(1,
x
t
),
ceea ce ne spune ca functia omogena f este ın fond o functie depinzand doarde variabila x
t . Efectuam schimbarea de variabila
x = t · y, y = y (t) . (44)

19
Avem
x′ (t) = y (t) + ty′ (t)
si, deoarece x′ (t) = f(x(t)t
), rezulta ca
y (t) + ty′ (t) = f (y (t))
sau
y′ (t) =f (y (t))− y (t)
t, (45)
adica o ecuatie cu variabile separabile.Rezulta ca integrarea ecuatiei diferentiale omogene (43) se reduce la in-
tegrarea ecuatiei cu variabile separabile (45), prin schimbarea de variabila(44) .
Daca f (y) ≡ y, ecuatia omogena (43) este
dx
dt=
x
t
si ecuatia (45), pentru t = 0 se reduce la dydt = 0, care are solutia generala
y = C, C ∈ R si deci solutia pentru (43) este x = Ct, C ∈ R, unde t = 0.Daca f (y) ≡ y, revenim la ecuatia diferentiala (45) si functia continua
f (y)− y nefiind identic nula, sa presupunem ca ea nu se anuleaza pe inter-
valul (a, b) . In acest caz, rezolvand ecuatia (45), gasim∫dy
f (y)− y=
∫dt
t.
Deci, notand cu F (y) o primitiva a functiei 1f(y)−y , obtinem
F (y) = ln |t|+ C, C ∈ R. (46)
Inlocuind pe y cu xt , obtinem solutia generala sub forma implicita a
ecuatiei (43),
F(xt
)= ln |t|+ C, C ∈ R; (47)
preferam ınsa sa alaturam relatiei (46) ecuatia x = ty si sa obtinem solutiagenerala sub forma parametrica a ecuatiei (43) ,
t = CeF (y), x = CyeF (y), C, y ∈ R. (48)
Exemplu.Sa se integreze ecuatia
x′ =
√x
t+
x
t.
Solutie. Cu schimbarea de variabila x = ty, ecuatia devine
ty′ =√y

20
sau
y′ =
√y
t. (49)
Daca√y ≡ 0, atunci dx
dt = xt , adica x = Ct, C ∈ R.
Daca√y ≡ 0, atunci, integrand ecuatia cu variabile separabile (49) , gasim
dy√y=
dt
t
sau
2√y = ln |t|+ C, C ∈ R,
de unde deducem
x = t
(ln |t|+ C
2
)2
, C ∈ R.
Exercitii.Sa se integreze urmatoarele ecuatii omogene:
(1) x′ = − t+xx ;
(2) x′ = ext + x
t ;
(3) tx′ =√t2 − x2 + x;
(4) x′ = xt+ tg x
t ;
(5)(√
t2 + x2 + x)dt− tdx = 0;
(6)(t2 + x2 + tx
)dt− t2dx = 0;
(7)(4t2 + 3tx+ x2
)dt+
(4x2 + 3tx+ t2
)dx = 0;
(8)(3t2 + 2tx− x2
)dt+
(t2 − 2tx− 3x2
)= 0.
Solutii.
(1) t2 + x− C
t = 0, C ∈ R;(2) x = −t ln
∣∣ln Ct
∣∣ , C ∈ R;(3) x = t sin ln |Ct| , C ∈ R;(4) sin t
x = Ct, C ∈ R;(5) t2 = C
(x+
√t2 + x2
), C ∈ R;
(6) x = t tg (Ct) , C ∈ R;(7)
(t2 + x2
)3(t+ x)2 = C, C ∈ R;
(8) t3 + t2x− tx2 − x3 = C, C ∈ R.
2.5. Ecuatii reductibile la ecuatii omogene. Presupunem ca avem derezolvat o ecuatie diferentiala de tipul
x′ = f
(a1t+ b1x+ c1a2t+ b2x+ c2
), (50)
unde a1, a2, b1, b2, c1, c2 ∈ R si f este continua ıntr-un domeniu din planultOx ın care a2t+ b2x+ c2 = 0.

21
Consideram dreptele de ecuatii
d1 : a1t+ b1x+ c1 = 0,
d2 : a2t+ b2x+ c2 = 0.
Cazul I. Dreptele d1 si d2 sunt identice, i.e.
a1a2
=b1b2
=c1c2
:= k1 ∈ R.
Atunci (50) devine x′ = f (k1) si solutia sa generala este x = f (k1) t + C,C ∈ R.
Cazul II. Dreptele d1 si d2 sunt paralele, i.e.∣∣∣∣ a1 b1a2 b2
∣∣∣∣ = 0 ⇐⇒ a1a2
=b1b2
:= k2 ∈ R.
Atunci (50) devine
x′ = f
(k2 (a2t+ b2x) + c1a2t+ b2x+ c2
)si, prin schimbarea de variabila
a2t+ b2x = y, y = y (t) ,
devine
y′ = a2 + b2f
(k2y + c1y + c2
),
adica o ecuatie cu variabile separabile.Cazul III. Dreptele d1 si d2 se intersecteaza, i.e.∣∣∣∣ a1 b1
a2 b2
∣∣∣∣ = 0.
In acest caz, fie {M0} := d1 ∩ d2; M0 = M0 (t0, x0) verifica sistemul{a1t0 + b1x0 + c1 = 0a2t0 + b2x0 + c2 = 0
.
Efectuam schimbarea de variabile{u = t− t0v = x− x0
, u = u (t) , v = v (t) .
Atunci (50) devine
v′ (u) = f
(a1u+ b1v
a2u+ b2v
),
care este o ecuatie omogena, care, prin schimbarea de variabila v = u · y,y = y (u), ne conduce la ecuatia cu variabile separabile,
y (u) + u · y′ (u) = f
(a1 + b1y
a2 + b2y
).

22
Exemple.1. Sa se integreze ecuatia
x′ =4t+ 6y + 4
2t+ 3x+ 6. (51)
Solutie. Consideram dreptele
d1 : 4t+ 6y + 4 = 0,
d2 : 2t+ 3x+ 6 = 0.
Deoarece d1∥d2, transformam ecuatia astfel:
x′ =2 (2t+ 3x) + 4
2t+ 3x+ 6
si notam 2t+ 3x = y; de aici obtinem 2 + 3x′ = y′ si deci
y′ =8y + 24
y + 6.
Daca y ≡ −3, atunci x = −3−2t3 este o solutie singulara pentru ecuatia
(51).Daca y ≡ −3, atunci obtinem
y + 6
y + 3dy = 8dt,
de unde
y + 3 ln |y + 3| = 8t+ C,C ∈ R, x =y − 2t
3.
2. Sa se integreze ecuatia
x′ =
(x+ 2t− 1
2t
)2
. (52)
Solutie. Consideram dreptele
d1 : x+ 2t− 1 = 0,
d2 : 2t = 0.
Deoarece d1 ∩ d2 = {M0} , M0 = M0 (0, 1), efectuam schimbarea de vari-abile {
u = tv = x− 1
, u = u (t) , v = v (t) .
De aici deducem, prin ınlocuire ın ecuatia (52) , ecuatia omogena
v′ =
(2u+ v
2u
)2
,
pe care o rezolvam cu schimbarea de variabila v = wu, w = w (u). Rezulta
w′ =4 + w2
4u,

23
de unde obtinem, prin separarea variabilelor si apoi prin integrare,
2 arctgw
2= ln |u|+ C, C ∈ R.
Solutia generala sub forma implicita a ecuatiei (52) este
2 arctgx− 1
2t= ln |t|+ C, C ∈ R.
Exercitii.Sa se integreze urmatoarele ecuatii reductibile la omogene:
(1) x′ = t−2x+5−2t+x−4 ;
(2) x′ = t+2x+12t+4x+3 ;
(3) x′ = 1−3t−3x1+t+x ;
(4) x′ = −7t+3x+73t−7x−3 ;
(5) (t− x+ 3) dt+ (3t+ x+ 1) dx = 0;(6) (t− 2x− 1) dt+ (3t− 6x+ 2) dx = 0;(7) (t− x+ 2) dt+ (t− x+ 3) dx = 0;(8) (t− 2x+ 5) dt+ (2t− x+ 4) dx = 0.
Solutii.
(1) (t+ x− 1)3 = C (t− x+ 3) , C ∈ R;(2) ln |4t+ 8x+ 5|+ 8x− 4t = C, C ∈ R;(3) 3t+ x+ 2 ln |t+ x− 1| = C, C ∈ R;(4) (t+ x− 1)5 (t− x− 1)2 = C, C ∈ R;(5) t+ x− 1 = Ce
2t+2t+x−1 , C ∈ R;
(6) t+ 3x− ln |t− 2x| = C, C ∈ R;(7) ln |2t− 2x+ 5| − 2 (t+ x− 2) = C, C ∈ R;(8) (t+ x+ 1)8 = C (t− x+ 3) , C ∈ R.
2.6. Ecuatii liniare de ordinul ıntai. Definitie 2.6.1. Ecuatie liniara(de ordinul ıntai) se numeste o ecuatie diferentiala de forma
x′ = a (t)x+ b (t) , (53)
adica o ecuatie liniara ın variabilele x si x′.Daca b (t) ≡ 0, atunci ecuatia
x′ = a (t)x (54)
se numeste ecuatie liniara (de ordinul ıntai) omogena; daca b (t) ≡ 0,ecuatia (53) se numeste ecuatie liniara (de ordinul ıntai) neomogena.
Remarcam faptul ca ecuatia omogena (54) admite tot timpul solutia ba-nala x = 0, dar scopul acestei sectiuni este acela de a gasi solutia generala aecuatiilor (53) si (54) ; pentru aceasta vom presupune ca functiile a si b suntcontinue pe intervalul (a1, a2).
Consideram mai ıntai ecuatia omogena (53) care este, evident, o ecuatiecu variabile separabile si ne punem problema integrarii ei. Va trebui sa

24
rezolvam separat ecuatia (54) pe fiecare din domeniile
D1 := (a1, a2)× (0,+∞)
si
D2 := (a1, a2)× (−∞, 0) .
Pe domeniul D1, vom obtine, prin separarea variabilelor,
dx
x= a (t) dt
si, prin integrare ın ambii membri, deducem
lnx (t) =
∫ t
t0
a (s) ds+ C1, C1 ∈ R,
ceea ce implica
x (t) = k1e∫ tt0
a(s)ds, k1 := eC1 > 0, (55)
unde t0 ∈ (a1, a2) este arbitrar.Aceasta functie reprezinta solutia generala a ecuatiei liniare si omogene
(54) ın domeniul D1.Analog vom gasi solutia generala pe domeniul D2 sub forma
x (t) = k2e∫ tt0
a(s)ds, k2 < 0, (56)
unde t0 ∈ (a1, a2) este arbitrar.Consideram acum familia de functii
x (t) = Ce∫ tt0
a(s)ds, C ∈ R (57)
si demonstram ca aceasta familie de functii reprezinta solutia generala aecuatiei (54) pe domeniul
D := (a1, a2)× R.
Intr-adevar, pentru C > 0 (respectiv C < 0) obtinem solutia (2.6.3)(respectiv (56)), iar pentru C = 0 obtinem solutia banala.
In plus, daca (t∗, x∗) ∈ D este arbitrar, atunci problema lui Cauchy (54)+(58), unde
x (t∗) = x∗ (58)
are solutie determinata ın mod unic din (57), deoarece (58) se scrie echiva-lent,
x∗ = x (t∗) = Ce∫ t∗t0
a(s)ds,
de unde rezulta
C = x∗e−
∫ t∗t0
a(s)ds.

25
Venind acum cu aceasta valoare ın (57), obtinem solutia problemei (54)+(58), sub forma
x (t) = x∗e−
∫ t∗t0
a(s)ds · e∫ tt0
a(s)ds= x∗e
∫ tt∗ a(s)ds.
Observatie 2.6.1.1) Din (57) rezulta ca multimea solutiilor ecuatiei omogene formeaza un
spatiu (vectorial) liniar, de dimensiune 1.2) Diferenta dintre doua solutii ale ecuatiei liniare neomogene reprezinta,
pe intervalul comun de definitie, o solutie a ecuatiei liniare omogene.3) Suma dintre o solutie a ecuatiei liniare omogene si o solutie a ecuatiei
liniare neomogene reprezinta, pe intervalul comun de definitie, o solutie aecuatiei liniare neomogene.
4) Suma dintre solutia generala pe (a1, a2) a ecuatiei liniare omogene sio solutie particulara, pe (a1, a2) , a ecuatiei neomogene, reprezinta solutiagenerala pe (a1, a2) a ecuatiei neomogene.
Lasam ca exercitiu demonstrarea acestor 4 propozitii.Metoda variatiei constantei (Metoda lui Lagrange)Din Observatia 2.6.1, 4), obtinem imediat ca solutia generala a ecuatiei
liniare neomogene (53) este
x (t) = x0 (t) + xp (t) , (59)
unde
x0 (t) = Ce∫ tt0
a(s)ds, C ∈ R (60)
este solutia generala a ecuatiei liniare omogene si xp este o solutie particularaa ecuatiei liniare neomogene.
Problema gasirii solutiei generale a ecuatiei neomogene s-a redus, asadar,la gasirea unei solutii particulare a ei.
Vom obtine o solutie particulara a ecuatiei neomogene, folosind metodavariatiei constantei sau metoda lui Lagrange. Aceasta consta ın a cautaxp de forma lui x0, ın care vom considera ca C este si ea o functie de t,C = C (t) . Rezulta
xp (t) = C (t) e∫ tt0
a(s)ds. (61)
Punand conditia ca (61) sa satisfaca (53), rezulta ca
C ′ (t) = e−
∫ tt0
a(s)dsb (t) ,
de unde
C (t) =
∫ t
t0
e−
∫ st0
a(τ)dτb (s) ds+ C1, C1 ∈ R.
Deoarece noua ne trebuie o singura solutie particulara a ecuatiei (53),vom considera pentru simplitate C1 = 0. Deci,
C (t) =
∫ t
t0
e−
∫ st0
a(τ)dτb (s) ds

26
si, ınlocuind ın (61), obtinem
xp (t) = e∫ tt0
a(s)ds ·∫ t
t0
e−
∫ st0
a(τ)dτb (s) ds (62)
sau, echivalent,
xp (t) =
∫ t
t0
e∫ ts a(τ)dτ b (s) ds.
Rezulta ca solutia generala a ecuatiei (53) se poate scrie sub una dinformele
x (t) = Ce∫ tt0
a(s)ds+
∫ t
t0
e∫ ts a(τ)dτ b (s) ds, C ∈ R, (63)
x (t) = e∫ tt0
a(s)ds[C +
∫ t
t0
e−
∫ st0
a(τ)dτb (s) ds
], C ∈ R (64)
sau, folosind integralele nedefinite,
x (t) = e∫a(t)dt
[C +
∫e−
∫a(t)dtb (t) dt
], C ∈ R. (65)
Observatie 2.6.2.1) Daca x1 si x2 sunt doua solutii particulare ale ecuatiei neomogene,
atunci x1 − x2 este solutie a ecuatiei omogene, C · (x1 − x2) , C ∈ R estesolutia generala a ecuatiei omogene si solutia generala a ecuatiei neomogeneeste
x (t) = C · (x1 (t)− x2 (t)) + x1 (t) , C ∈ R
(termenii din paranteza pot comuta, iar ultimul termen poate fi si x2 (t)).Exemple.1. Determinati solutia problemei Cauchy{
x′ = 2tx+ tx (0) = 1
.
Solutie. Determinam solutia generala a ecuatiei liniare neomogene
x′ = 2tx+ t, (66)
unde a, b : R → R, a (t) = 2t, b (t) = t, ∀t ∈ R.Consideram mai ıntai ecuatia omogena,
x′ = 2tx,
ıi separam variabilele,
dx
x= 2tdt,
integram,
ln |x| = t2 + C, C ∈ R,

27
de unde obtinem solutia generala a ecuatiei omogene sub forma
x0 (t) = Cet2, C ∈ R.
In continuare, cautam o solutie particulara a ecuatiei neomogene de forma
xp (t) = C (t) et2;
impunem conditia ca ea sa satisfaca (66) si gasim
C ′ (t) = e−t2t,
de unde
C (t) = −1
2e−t2 .
Rezulta xp (t) = −12 si
x (t) = x0 (t) + xp (t) = Cet2 − 1
2, C ∈ R
este solutia generala a ecuatiei (66) .Din conditia initiala,
1 = x (0) = C − 1
2,
deducem ca C = 32 si astfel solutia problemei Cauchy date este x (t) =
32e
t2 − 12 .
2. Determinati solutia generala a ecuatiei
x′ = −1
tx+ 3t, t > 0.
Solutie. Avem a, b : (0,+∞) → R, a (t) = −1t , b (t) = t. Folosind relatia
(65) , avem
x (t) = e−∫
dtt
(C +
∫e
dtt 3tdt
)=
C
t+ t2, C ∈ R.
3. Fie f : [0,+∞) → R o functie continua, astfel ıncat
limt→∞
f (t) = 0.
Sa se demonstreze ca orice solutie a ecuatiei liniare
x′ + ax = f (t) , t ≥ 0, a > 0
converge la 0, cand t → ∞.Solutie. Fie x = x (t) o solutie oarecare a ecuatiei date. Rezulta
x (t) = e−at
[C +
∫ t
0easf (s) ds
], C ∈ R, t ≥ 0.
Atunci, avem evident
|x (t)| ≤|C|+
∫ t0 e
asf (s) ds
eat, t ≥ 0.

28
Daca f este astfel ıncat∫∞0 eas |f (s)| ds < ∞, atunci din inegalitatea
precedenta rezulta limt→∞
x (t) = 0.
In caz contrar, adica daca∫∞0 eas |f (s)| ds = ∞, se ajunge imediat la
concluzia dorita, folosind regula lui L’Hospital si ipoteza limt→∞
f (t) = 0.
Observam ca daca stim doua solutii x1 si x2 pentru ecuatia liniara omogena
x′ = a (t)x,
atunci solutia generala a ecuatiei liniare neomogene
x′ = a (t)x+ b (t)
este
x (t) = C (x1 (t)− x2 (t)) + x1 (t) , C ∈ R.
In consecinta, considerand problema determinarii solutiilor x = x (t) aleecuatiei liniare neomogene, care apartin unui spatiu vectorial L, tinand contde faptul ca daca doua solutii se gasesc ın L, atunci toate solutiile se vorgasi ın L, rezulta ca avem trei posibilitati exclusive si exhaustive:
(1) sau nici o solutie nu este din spatiul L;(2) sau o singura solutie este ın spatiul L;(3) sau toate solutiile sunt ın spatiul L.4. Sa se determine solutiile periodice ale ecuatiei
x′ = 2x cos2 t− sin t, t ∈ R.
Solutie. Fie x = x (t) o solutie oarecare a ecuatiei date. Rezulta
x (t) = et+sin 2t
2
[C −
∫ t
0e−(s+
sin 2s2 ) sin sds
], C ∈ R, t ≥ 0.
Cum solutiile periodice formeaza un spatiu vectorial L si cum orice solutieperiodica este o functie marginita, rezulta din relatia precedenta ca avem celmult o solutie periodica. Eventuala solutie periodica va fi data de constantaC0 pe care o vom determina din conditia de marginire. Intr-adevar, cum
limt→∞
et+sin 2t
2 = +∞, rezulta cu necesitate
C0 =
∫ ∞
0e−(s+
sin 2s2 ) sin sds,
de unde eventuala (unica) solutie periodica va fi
x (t) =
∫ ∞
tet−se
sin 2t−sin 2s2 sin sds.
Cu schimbarea de variabila −t+ s = z, obtinem
x (t) =
∫ ∞
0sin (t+ z) e−ze
sin 2t−sin 2(t+z)2 dz,
de unde rezulta imediat
x (t+ 2π) = x (t) , ∀t ∈ R.

29
Deci, solutia gasita este unica solutie periodica a ecuatiei date.5. Fie f : [0,+∞) → R o functie continua si consideram ecuatia au-
tonoma
x′ = f (x) , t ≥ 0.
Daca aceasta ecuatie admite o solutie x = x (t), cu proprietatea ca exista
limt→∞
x (t) := l ∈ R,
atunci sa se demonstreze ca
f (l) = 0.
Solutie. Fie x = x (t) solutia din enunt, pentru care exista
limt→∞
x (t) := l ∈ R.
Aplicand Teorema lui Lagrange de medie functiei x pe fiecare din inter-valele [n, n+ 1] , n ∈ N, obtinem ca exista tn ∈ [n, n+ 1], astfel ıncat
x (n+ 1)− x (n) = x′ (tn) , ∀n ∈ N.Deci, pentru orice n ∈ N, exista tn ∈ [n, n+ 1], astfel ıncat
x (n+ 1)− x (n) = f (x (tn)) .
Cum tn → ∞, cand n → ∞ si f este continua, rezulta ca avem
f (l) = f(limt→∞
x (t))= f
(limn→∞
x (tn))= lim
n→∞f (x (tn)) =
= limn→∞
[x (n+ 1)− x (n)] = l − l = 0.
Exercitii.Sa se integreze urmatoarele ecuatii liniare de ordinul ıntai:
(1) tx′ − 2x = 2t4;(2) (2t+ 1)x′ = 4t+ 2x;(3) x′ + x tg t = 1
cos t ;
(4)(tx+ et
)dt− tdx = 0;
(5) t2x′ + tx+ 1 = 0;(6) x = t (x′ − t cos t) ;(7) 2t
(t2 + x
)dt = dx;
(8) (tx′ − 1) ln t = 2x;(9) tx′ + (t+ 1)x = 3t2e−t;(10)
(t+ x2
)dx = xdt;
(11) (2ex − t)x′ = 1;(12)
(sin2 x+ t ctg x
)x′ = 1.
(13) Se considera ecuatia
x′ + a (t)x = f (t) , t ≥ 0,
unde a, f : [0,+∞) → R sunt functii continue, a (t) ≥ c > 0, ∀ ≥ 0,limt→∞
f (t) = 0. Sa se demonstreze ca toate solutiile acestei ecuatii
converg la 0 cand t → ∞.

30
(14) Fie ecuatia
tx′ −(2t2 + 1
)x = t2, t ≥ 0.
Sa se demonstreze ca exista o unica solutie care converge la o limitafinita, cand t → ∞. Sa se integreze ecuatia.
(15) Se considera ecuatia
tx′ + ax = f (t) , t ≥ 0,
unde a ∈ R∗ si limt→0t>0
f (t) = b. Sa se demonstreze ca exista si este
unica o solutie x = x (t) , care ramane marginita cand t → 0. Sa sedetermine acesta lim
t→0t>0
x (t) .
(16) Sa se determine solutiile ecuatiei
x′ sin 2t = 2 (x+ cos t) , x ≥ π
2,
care raman marginite atunci cand x → π2 , x > π
2 .(17) Sa se demonstreze ca ecuatia
x′ = tx− 1, t ≥ 0
admite o unica solutie marginita, care este descrescatoare si convergela 0, atunci cand t → ∞.
(18) Se considera ecuatia
x′ + ax = f (t) , t ∈ R,
unde f : R → R este o functie continua si periodica, iar a ∈ R. Sase demonstreze ca ecuatia admite o unica solutie periodica, avandaceeasi perioada ca f.
Solutii.
(1) x = Ct2 + t4, C ∈ R;(2) x = (2t+ 1) (C + ln |2t+ 1|) + 1, C ∈ R;(3) x = sin t+ C cos t, C ∈ R;(4) x = et (ln |t|+ C) , C ∈ R;(5) tx = C − ln |t| , C ∈ R;(6) x = t (C + sin t) , C ∈ R;(7) x = Cet
2 − t2 − 1, C ∈ R;(8) x = C ln2 t− ln t, C ∈ R;(9) tx =
(t3 + C
)e−t, C ∈ R;
(10) Se schimba rolul variabilelor t si x (ın sensul ca t = t (x)) si rezultasolutiile
t = x2 + Cx,C ∈ R
si
x = 0;

31
(11) Se schimba rolul variabilelor t si x si rezulta t = ex + Ce−x, C ∈ R,x = 0;
(12) Se schimba rolul variabilelor t si x si rezulta t = (C − cosx) sinx,C ∈ R;
(13) Se arata, ca la exemplul 3., ca solutiile
x (t) = e−∫ t0 a(s)ds
[C +
∫ t
0f (s) e
∫ s0 a(τ)dτds
], C ∈ R
au limt→∞
|x (t)| = 0;
(14) Avem
x (t) = tet2
∫ t
∞e−s2ds, t ≥ 0
si
limt→∞
x (t) = −1
2.
(15) Avem
x (t) = x−a
[C +
∫ t
a0
sa−1f (s) ds
], C ∈ R, t ≥ 0, a0 ∈ R.
Se considera separat cazurile a > 0 si a < 0 si rezulta
limt→0t>0
x (t) =b
a.
(16) Se obtine o singura solutie marginita cand x → π2 , x > π
2 si anume
x (t) =sin t− 1
cos t.
(17) Se obtine solutia
x (t) = −∫ t
∞e
t2−s2
2 ds.
(18) Se obtine solutia
x (t) = e−at
[C +
∫ t
0easf (s) ds
], C ∈ R
si se considera separat cazurile a > 0 si a < 0.
2.7. Ecuatii Bernoulli. Sunt de tipul
x′ = a (t)xα + b (t)x, (67)
unde α ∈ R.Este evident ca pentru α = 0, ecuatia (67) este o ecuatie liniara neo-
mogena, iar pentru α = 1, ecuatia (67) este o ecuatie liniara omogena.Ramane de rezolvat ecuatia ın cazul ın care α ∈ R\ {0, 1} .

32
In acest caz, efectuam schimbarea de variabila
y := x1−α, (68)
ecuatia (67) transformandu-se ın
1
1− αy
α1−α y′ = a (t) y
α1−α + b (t) y
11−α
sau
y′ = (1− α) b (t) y + (1− α) a (t) , (69)
care este o ecuatie liniara neomogena.Daca functiile a si b sunt continue pe un interval (a1, a2), atunci (69) ad-
mite solutie; se gaseste solutia generala y = y (t), dupa care solutia generala
a ecuatiei Bernoulli (67) va fi x (t) = y (t)1
1−α .Observatie 2.7.1.1) Daca α > 1, atunci (67) admite si solutia x = 0, pe care nu o putem
deduce din (68).2) Cu toate ca solutia y este definita pe tot intervalul (a1, a2), s-ar putea
ıntampla ca solutia x sa nu fie definita pe tot intervalul (a1, a2) ; de exemplu,daca α = 1 − 1
2n , n ∈ N∗, atunci 11−α = 2n si deci x va fi solutie numai pe
acele subintervale ale intervalului (a1, a2) pe care y este pozitiva.Exemplu.Sa se integreze ecuatia
x′ +t
1− t2x = t
√x
si sa se afle solutia care satisface conditia x (0) = 49 .
Solutie. Ecuatia se rescrie
x′ =t
t2 − 1x+ t
√x,
care este o ecuatie Bernoulli cu α = 12 , a (t) =
tt2−1
, b (t) = t, t = ±1.
Efectuam schimbarea de variabila y = x1−12 sau x = y2, y = y (t) si
obtinem ecuatia liniara
y′ =t
2 (t2 − 1)y +
t
2,
a carei solutie generala este, pentru t ∈ (−1, 1) ,
y (t) = C4√
1− t2 − 1
3
(1− t2
), C ∈ R.
Rezulta solutia generala pe (−1, 1) a ecuatiei date,
x (t) =
(C
4√
1− t2 − 1
3
(1− t2
))2
, C > 0
si x = 0, care este o solutie singulara, ea neputandu-se obtine din cea gen-erala prin particularizarea constantei.

33
Pe intervalele (−∞,−1) si (1,+∞), solutia generala este dedusa analog,obtinandu-se
x (t) =
(C
4√
t2 − 1 +1
3
(t2 − 1
))2
, C > 0
si x = 0, solutie singulara.Din conditia x (0) = 4
9 , obtinem C = 1 si astfel, solutia ceruta este x (t) =(4√1− t2 − 1
3
(1− t2
))2, t ∈ (−1, 1) .
Exercitii.Sa se integreze urmatoarele ecuatii sau probleme Cauchy:
(1) x′ = 4tx+ t
√x;
(2) x′ = −1tx− tx2;
(3) 2txx′ − x2 + t = 0;(4) x′ + 2x = x2et;(5) x′ = t
2(t2−1)x+ t
2x ;
(6) x′ = x cos t+ x2 cos t;
(7)
{tx′ + x = x2 ln tx (1) = 1
;
(8)
{x′ − 9t2x = t2
(1 + t3
)x
23
x (0) = 0.
Solutii.
(1) x =(Ct2 + t2
2 ln |t|)2
, C ∈ R; x = 0;
(2) x (t) = 1t2+tC
, C ∈ R; x = 0;
(3) x2 = t ln∣∣Ct
∣∣ , C ∈ R; x = 0;
(4) x(Ce2t + et
)− 1 = 0, C ∈ R; x = 0;
(5) x2 = t2 − 1 + C√t2 − 1, C ∈ R; x = 0;
(6)
x (t) =1
Ce− sin t − 1, C ∈
(−∞,
1
e
)∪ (e,+∞) , t ∈ R,
x (t) =1
Ce− sin t − 1, C ∈
[1
e, e
], t ∈ Ik,
unde
Ik := (arcsin lnC + 2kπ, arcsin lnC + 2 (k + 1)π) ,
x (t) = 0, t ∈ R;
(7) x = 11+ln|t| ;
(8) x =(29e
t3 − 19 t
3 − 29
)3; y = 0.

34
2.8. Ecuatii Riccati. Ecuatia diferentiala Riccati are forma
x′ = a (t)x2 + b (t)x+ c (t) , (70)
unde a, b, c : (a1, a2) → R sunt functii continue.Rezolvarea ecuatiei (70) se bazeaza pe schimbarea de variabila
x = xp +1
y, (71)
unde xp = xp (t) este o solutie particulara a ecuatiei (70).
Inlocuind ın (70), gasim ca y verifica ecuatia liniara neomogena de ordinulıntai,
y′ = − [2a (t)xp (t) + b (t)] y − a (t) . (72)
Rezolvam apoi (72) si, cu solutia gasita, y = y (t), venim ın (71) si obtinemsolutia ecuatiei Riccati.
Exemple.1. Sa se integreze ecuatia
t2x′ + t2x2 = tx− 1.
Solutie. Ecuatia se scrie sub forma
x′ = −x2 +1
tx− 1
t2,
care este o ecuatie Riccati cu a (t) = −1, b (t) = 1t , c (t) = − 1
t2, t = 0.
Cautam o solutie particulara de forma coeficientilor a (t) , b (t) , c (t) ,xp (t) = a
t , a ∈ R. Punand conditia ca functia at sa fie solutie a ecuatiei
date, gasim a = 1.Deci, xp =
1t si efectuam schimbarea de variabila x = 1
t +1y . Atunci y va
satisface ecuatia liniara
y′ =y
t+ 1,
deci
y (t) = t (ln |t|+ C) , C ∈ R.
Solutia ecuatiei date este
x (t) =1
t+
1
t (ln |t|+ C), C ∈ R.
2. Fie x1, x2, x3, x4 patru solutii distincte oarecare ale unei ecuatii detip Riccati. Sa se arate ca functia
x3 − x1x3 − x2
:x4 − x1x4 − x2
este constanta.

35
Solutie. Intr-adevar, daca φ = φ (t) este o solutie particulara pentruecuatia Riccati (70), atunci prin calcule simple deducem ca mai sus ca substi-tutia
z = x− φ
transforma ecuatia (70) ın ecuatia Bernoulli
z′ = [b (t) + 2a (t)φ (t)] z + a (t) z2.
Fie x = x (t) o solutie a ecuatiei Riccati (70) , diferita de x1 si x2. Con-sideram functia
y (t) =x (t)− x1 (t)
x (t)− x2 (t).
Tinand cont ca x− x1 si x− x2 verifica ecuatia Bernoulli scrisa mai sus,avem
y′ (t) =(x′ − x′1) (x− x2)− (x− x1) (x
′ − x′2)
(x− x2)2 =
= a (t) [x1 (t)− x2 (t)] y (t) .
Rezulta
xi (t)− x1 (t)
xi (t)− x2 (t)= Cie
∫ tt0
b(s)[x1(s)−x2(s)]ds, Ci = 0, i ∈ 3, 4.
Aceste relatii demonstreaza rezultatul:
x3 − x1x3 − x2
:x4 − x1x4 − x2
=C3
C4.
Exercitii.Sa se integreze urmatoarele ecuatii diferentiale, stiind ca admit solutii
particulare de formele indicate:
(1) x′ = x2 − tx− t, xp (t) = at+ b, a, b ∈ R;(2) t2
(x′ + x2
)− 2 (tx− 1) = 0, xp (t) =
at , a ∈ R;
(3) tx′ = x2 − (2t+ 1)x+ t2 + 2t, xp (t) = at+ b, a, b ∈ R;(4) x′ = −x2 + 1 + t2, xp (t) = at, a ∈ R;(5) t2x′ + (tx− 2)2 = 0, xp (t) =
at , a ∈ R;
(6) t2x′ − t2x2 − tx− 1 = 0, xp (t) =at , a ∈ R;
(7) x′ + x2 − 12t2
= 0, xp (t) =at , a ∈ R.
Solutii.
(1) xp (t) = t+ 1, x (t) = t+ 1 + et2
2+2t
(C −
∫e
t2
2+2tdt
)−1
, C ∈ R;
(2) xp (t) =2t , x (t) =
1−2Ct2
1−Ct , C ∈ R;(3) xp (t) = t, x (t) = t+ 1
1+Ct , C ∈ R;
(4) xp (t) = t, x (t) = t+ e−t2
C+∫e−t2dt
, C ∈ R;
(5) xp (t) =1t , x (t) =
1t +
3t2
t3+C, C ∈ R;

36
(6) xp (t) = −1t , x (t) = −1
t +1
t(C−ln|t|) , C ∈ R;(7) x (t) = 2t3−C
t(C+t3), C ∈ R.
2.9. Ecuatii implicite ın raport cu derivata. Ecuatiile implicite ın ra-port cu derivata sunt de forma F (t, x, x′) = 0, ın care se presupune ca
derivata functiei necunoscute nu se poate exprima ca x′ = f (t, x) . In acestcaz, admitem ca ecuatia este rezolubila ın raport cu variabila x ın urmatorulsens: se poate transforma ın x = f (t, x′) . In acest caz, integrarea acesteiecuatii diferentiale se bazeaza pe metoda parametrica. Aceasta consta ınefectuarea schimbarii de variabile
x′ =dx
dt= p, (73)
care ne da
x = f (t, p) .
Diferentiem ın ambii membri aceasta ecuatie si, ın formula gasita, ınlocuim,din (73) pe dx cu pdt si obtinem o ecuatie de forma
P (t, p) dt+Q (t, p) dp = 0.
Daca solutia acestei ecuatii este t = φ (p), atunci gasim solutia ecuatieiinitiale sub forma parametrica,{
t = φ (p)x = f (φ (p) , p)
, p ∈ R.
Exemplu.Sa se integreze ecuatia
x = t+ x′ − lnx′. (74)
Solutie. Introducand parametrul p = x′ > 0, gasim
x = t+ p− ln p. (75)
Diferentiind ın ambii memri ai egalitatii (75), obtinem
dx = dt+ dp− dp
p
sau
pdt = dt+ dp− dp
p.
Integram ecuatia obtinuta, care este o ecuatie cu variabile separabile:
(p− 1) dt =p− 1
pdp. (76)

37
Cazul I. Daca p = 1, atunci
dt =dp
p,
de unde
t = ln p+ C, C ∈ R.
Rezulta ca solutia generala parametrica a ecuatiei (74) va fi{t = ln p+ Cx = p+ C
, C ∈ R, p > 0.
Mai putem elimina parametrul p > 0 ıntre cele doua ecuatii ale solutieiparametrice anterioare si rezulta solutia generala
x = et−C + C, C ∈ R.
Cazul II. Daca p = 1 ın (76), atunci (75) devine
y = x+ 1.
2.10. Ecuatia Lagrange. Ecuatia Lagrange este un caz particular de ecuatieimplicita ın raport cu derivata si are forma
x = ta(x′)+ b
(x′), (77)
unde a, b : I → R sunt de clasa C1 (I), I interval al axei reale.Cu notatia x′ = p, unde p ∈ R este parametru, gasim
x = ta (p) + b (p) .
Diferentiind ın ambii membri, obtinem
pdt = a (p) dt+[ta′ (p) + b′ (p)
]dp
sau
[a (p)− p] dt+[ta′ (p) + b′ (p)
]dp = 0.
Cazul I. Daca a (p) = p, ∀p ∈ I, atunci solutia generala a ecuatieiliniare de ordinul ıntai obtinute, cu p variabila independenta si t functianecunoscuta este
t = A (p)C +B (p) , p ∈ R, C ∈ R
si deci solutia generala sub forma parametrica a ecuatiei Lagrange este{t = A (p)C +B (p)x =
∫p [A′ (p)C +B′ (p)] dp
, p ∈ R, C ∈ R
sau {t = A (p)C +B (p)x = [A (p)C +B (p)] a (p) + b (p)
, p ∈ R, C ∈ R. (78)

38
Reciproc se verifica usor ca orice functie data parametric de (78) , undet = A (p)C +B (p) este solutie pentru ecuatia diferentiala
dt
dp=
a′ (p)
p− a (p)t+
b′ (p)
p− a (p),
satisface ecuatia Lagrange (77) .Cazul II. Daca a (p) = p are solutiile reale p = pi ∈ I, i ∈ 1, n, atunci
x = pit+ b (pi) , i ∈ 1, n
sunt solutii singulare ale ecuatiei Lagrange.Exemplu.Sa se integreze ecuatia
x = 2tx′ − x′2.
Solutie. Avem de rezolvat o ecuatie Lagrange, cu a (r) = 2r, b (r) = −r2,a, b : R → R.
Notam x′ = p si gasim
x = 2pt− p2.
Dar dx = pdt; deci
pdt = 2pdt+ 2tdp− 2pdp
sau
pdt = (2p− 2t) dp.
Cazul I. Daca p = 0, atunci
t′ (p) = −2t
p+ 2,
ecuatie liniara neomogena generala avand solutia t = Cp2
+ 23p, C ∈ R. De
asemenea,
x = 2pt (p)− p2 = 2p
(C
p2+
2
3p
)− p2 = 2
C
p+
p2
3.
Deci, solutia generala parametrica este{t = C
p2+ 2
3p
y = 2Cp + p2
3
, p ∈ R, C ∈ R.
Cazul II. Daca p = 0, atunci ecuatia devine x = 0, care este de fapt osolutie singulara a ecuatiei date.

39
2.11. Ecuatia Clairaut. Ecuatia Clairaut este un caz particular de ecuatieLagrange ın care a (r) = r si are forma
x = tx′ + b(x′), (79)
unde b : I → R este o functie de clasa C1 (I), I interval al axei reale.Aceasta ecuatie este un caz particular de ecuatie Lagrange.Cu aceeasi metoda, prezentata ın Sectiunea 2.9, obtinem dx = pdt, x =
tp+ b (p),
pdt = tdp+ pdt+ b′ (p) dp
sau (t+ b′ (p)
)dp = 0,
de unde t+ b′ (p) = 0 sau dp = 0.Daca t = −b′ (p), rezulta ca x = −pb′ (p)+b (p) si astfel o solutie singulara
parametrica a ecuatiei Clairaut este{t = −b′ (p)x = −pb′ (p) + b (p)
, p ∈ R. (80)
Daca dp = 0, atunci p = C si deci
x = tC + b (C) , C ∈ I (81)
este solutia generala parametrica a ecuatiei Clairaut.Reciproc, orice functie de forma (80) sau (81) este solutie pentru ecuatia
Clairaut (79) , fapt care rezulta foarte simplu.Exemplu.Sa se integreze ecuatia
x = tx′ +√1 + x′2.
Solutie. Avem de rezolvat o ecuatie Clairaut, cu b (r) =√1 + r2, b :
R → R. Solutiile ecuatiei sunt, conform relatiilor (80) sau (81) ,
x = Ct+√
1 + C2, C ∈ R
(solutia generala) si t = − p√1+p2
x = 1√1+p2
, p ∈ R
(solutia singulara). Parametrul p mai poate fi eliminat si solutia singularase mai scrie sub forma
x =√
1− t2, t ∈ (−1, 1) ,
care reprezinta ecuatia semicercului superior de raza 1 si centru O.Exercitii.Sa se integreze urmatoarele ecuatii implicite ın raport cu derivata:
(1) x′2 + tx = x2 + tx′;

Ecuatii diferentiale ordinareTema 4 - Tipuri de ecuatii de ordinul I
I. Verificati daca urmatoarele ecuatii diferentiale sunt cu diferentiale to-tale exacte si, ın caz afirmativ, sa se rezolve:
(1) (2t+ 3) dt+ (2x− 2) dx = 0;(2) (2t+ 4x) dt+ (2t− 2x) dx = 0;(3)
(9t2 + x− 1
)dt+ (t− 4x) dx = 0;
(4)(2tx2 + 2x
)dt+
(2t2x+ 2t
)dx = 0;
(5) dxdt = −at+bx
bt+cx ;
(6) dxdt = −at−bx
bt−cx ;
(7)(et sinx− 2x sin t
)dt+
(et cosx+ 2 cos t
)dx = 0;
(8)(et sinx+ 3x
)dt−
(3t− et sinx
)dx = 0;
(9)(xetx cos 2t− 2etx sin 2t+ 2t
)dt+
(tetx cos 2x− 3
)dx = 0;
(10)(xt + 6t
)dt+ (ln t− 2) dx = 0;
(11) (t lnx+ tx) dt+ (x ln t+ tx) dx = 0;(12) tdt
(t2+x2)32+ xdx
(t2+x2)32= 0;
(13) (2t+ 3t2x)dt+ (t3 − 3x2)dx = 0.
Solutii.
(1) t2 + 3t+ x2 − 2x = C, C ∈ R;(2) Nu este ecuatie cu diferentiala totala exacta;(3) 3t3 + tx− t− 2x2 = C, C ∈ R;(4) t2x2 + 2tx = C, C ∈ R;(5) at2 + 2btx+ cx2 = C, C ∈ R;(6) Nu este ecuatie cu diferentiala totala exacta;(7) et sinx+ 2x cos t = C, C ∈ R;(8) Nu este ecuatie cu diferentiala totala exacta;(9) etx cos 2t+ t2 − 3x = C, C ∈ R;(10) x ln t+ 3t2 − 2x = C, C ∈ R;(11) Nu este ecuatie cu diferentiala totala exacta;(12) t2 + x2 = C, C ∈ R;(13) t2 + t3x− x3 = C, C ∈ R.
II. Sa se rezolve urmatoarele ecuatii cu variabile separabile sau problemeCauchy:
(1) tx′ = x3 + x;(2) x′ tg t− x = 0;(3) x− tx′ = a
(1 + t2x′
), a ∈ R;
(4) t2 (x+ 1) dt+(t3 − 1
)(x− 1) dx = 0;
(5) xdx = (tdx+ xdt)√1 + x2;
(6) txdt+ (t+ 1) dx = 0;(7) x′ ctg t+ x = 2;
1

2
(8) x′ = 10t+x;(9) x′ = cos (x− t) ;(10) tx′ = x cos ln x
t ;(11) tx′ − x = t tg x
t ;
(12) x2 + t2x′ = txx′;
(13)
{ (1 + et
)xx′ − et = 0
x (0) = 1;
(14)
{ (tx2 + t
)dt+
(t2x− x
)dx = 0
x (0) = 1;
(15)
{x′ sin t− x lnx = 0x(π2
)= 1
.
Solutii.
(1) t√1 + x2 − Cx = 0, C ∈ R, x = 0;
(2) x = C sin t, C ∈ R;(3) x− a = Ct
1+at , C ∈ R;
(4) 3x+ ln|t3−1|(x+1)6
= C, C ∈ R;
(5)√1 + x2 = tx+ C, C ∈ R;
(6) ln∣∣∣ Cxt+1
∣∣∣ = −t, C ∈ R;(7) (2− x) cos t = C, C ∈ R;(8) 10t + 10−x = C, C ∈ R;(9) x− t
not= y; t = ctg x−t
2 + C, C ∈ R;
(10) xtnot= y; ln |t| = 2 ctg
ln xt
2 + C, C ∈ R;
(11) xtnot= y; sin x
t = Ct, C ∈ R;
(12) xtnot= y; x = Ce
xt , C ∈ R;
(13) 2et2
2 =√e(1 + et
);
(14) 1 + x2 = 21−t2
;
(15) x = 1.
III. Demonstrati ca ecuatiile urmatoare nu sunt cu diferentiala totala ex-acta, admit un factor integrant de forma specificata alaturat, sa se determineun astfel de factor integrant si apoi sa se rezolve ecuatiile:
(1) t2x3dt+ t(1 + x2
)dx = 0, µ = µ
(1tx3
);
(2)(sinxx − 2e−t sin t
)dt+ cosx+2e−t cos t
x dx = 0, µ = µ(xet);
(3) xdt+ (2t− xex) dx = 0, µ = µ (x) ;
(4)(3tx+ x2
)dt+
(t2 + tx
)dx = 0, µ = µ
(1
tx(2t+x)
);
(5)(2tx+ t2x+ x3
3
)dt+
(t2 + x2
)dx = 0, µ = µ (t) ;
(6)(1− t2x
)dt+ t2 (x− t) dx = 0, µ = µ (t) ;

3
(7) 2tx lnxdt+(t2 + x2
√1 + x2
)dx = 0, µ = µ (x) ;
(8)(t3x2 + x
)dt+
(t2x3 + t
)dx = 0, µ = µ (tx) ;
(9) tx2dt+(t2x− t
)dx = 0, µ = µ (tx) ;
(10)(3t+ 2x+ x2
)dt+
(t+ 4tx+ 5x2
)dx = 0, µ = µ
(t+ x2
);
(11) (t− tx) dt+(x+ t2
)dx = 0, µ = µ
(t2 + x2
);
(12)(t2 + x2 + 1
)dt− 2txdx = 0, µ = µ
(x2 − t2
).
Solutii.
(1) t2 + 2 ln |x| − 1x2 = C, C ∈ R;
(2) (b) et sinx+ 2x cos t = C, C ∈ R;(3) (c) tx2 −
(x2 − 2x+ 2
)ex = C, C ∈ R;
(4) (d) ln |t|+ ln√
|x|+ ln√
|x+ 2t| = C, C ∈ R;(5) (e) etx
(t2 + 1
3x2)= C, C ∈ R;
(6) (f) tx2 − 2t2x− 2 = Ct, C ∈ R;(7) (g) t2 ln |x|+ 1
3
(x2 + 1
) 32 = C, C ∈ R;
(8) (h) t2
2 − 1tx + x2
2 = C, C ∈ R;(9) (i) tx− ln |x| = C, C ∈ R;(10) (j) (t+ x)
(t+ x2
)2= C, C ∈ R;
(11) (k) t−x2
(t+x2)2= C, C ∈ R;
(12) (l) 1+x2−t2
t = C, C ∈ R.
IV. Sa se integreze urmatoarele ecuatii omogene:
(1) x′ = − t+xx ;
(2) x′ = ext + x
t ;
(3) tx′ =√t2 − x2 + x;
(4) x′ = xt+ tg x
t ;
(5)(√
t2 + x2 + x)dt− tdx = 0;
(6)(t2 + x2 + tx
)dt− t2dx = 0;
(7)(4t2 + 3tx+ x2
)dt+
(4x2 + 3tx+ t2
)dx = 0;
(8)(3t2 + 2tx− x2
)dt+
(t2 − 2tx− 3x2
)= 0.
Solutii.
(1) t2 + x− C
t = 0, C ∈ R;(2) x = −t ln
∣∣ln Ct
∣∣ , C ∈ R;(3) x = t sin ln |Ct| , C ∈ R;(4) sin t
x = Ct, C ∈ R;(5) t2 = C
(x+
√t2 + x2
), C ∈ R;
(6) x = t tg (Ct) , C ∈ R;(7)
(t2 + x2
)3(t+ x)2 = C, C ∈ R;

4
(8) t3 + t2x− tx2 − x3 = C, C ∈ R.
V. Sa se integreze urmatoarele ecuatii reductibile la omogene:
(1) x′ = t−2x+5−2t+x−4 ;
(2) x′ = t+2x+12t+4x+3 ;
(3) x′ = 1−3t−3x1+t+x ;
(4) x′ = −7t+3x+73t−7x−3 ;
(5) (t− x+ 3) dt+ (3t+ x+ 1) dx = 0;(6) (t− 2x− 1) dt+ (3t− 6x+ 2) dx = 0;(7) (t− x+ 2) dt+ (t− x+ 3) dx = 0;(8) (t− 2x+ 5) dt+ (2t− x+ 4) dx = 0.
Solutii.
(1) (t+ x− 1)3 = C (t− x+ 3) , C ∈ R;(2) ln |4t+ 8x+ 5|+ 8x− 4t = C, C ∈ R;(3) 3t+ x+ 2 ln |t+ x− 1| = C, C ∈ R;(4) (t+ x− 1)5 (t− x− 1)2 = C, C ∈ R;(5) t+ x− 1 = Ce
2t+2t+x−1 , C ∈ R;
(6) t+ 3x− ln |t− 2x| = C, C ∈ R;(7) ln |2t− 2x+ 5| − 2 (t+ x− 2) = C, C ∈ R;(8) (t+ x+ 1)8 = C (t− x+ 3) , C ∈ R.
VI. Sa se integreze urmatoarele ecuatii liniare de ordinul ıntai:
(1) tx′ − 2x = 2t4;(2) (2t+ 1)x′ = 4t+ 2x;(3) x′ + x tg t = 1
cos t ;
(4)(tx+ et
)dt− tdx = 0;
(5) t2x′ + tx+ 1 = 0;(6) x = t (x′ − t cos t) ;(7) 2t
(t2 + x
)dt = dx;
(8) (tx′ − 1) ln t = 2x;(9) tx′ + (t+ 1)x = 3t2e−t;(10)
(t+ x2
)dx = xdt;
(11) (2ex − t)x′ = 1;(12)
(sin2 x+ t ctg x
)x′ = 1.
Solutii.
(1) x = Ct2 + t4, C ∈ R;(2) x = (2t+ 1) (C + ln |2t+ 1|) + 1, C ∈ R;(3) x = sin t+ C cos t, C ∈ R;(4) x = et (ln |t|+ C) , C ∈ R;(5) tx = C − ln |t| , C ∈ R;(6) x = t (C + sin t) , C ∈ R;

5
(7) x = Cet2 − t2 − 1, C ∈ R;
(8) x = C ln2 t− ln t, C ∈ R;(9) tx =
(t3 + C
)e−t, C ∈ R;
(10) Se schimba rolul variabilelor t si x (ın sensul ca t = t (x)) si rezultasolutiile
t = x2 + Cx,C ∈ Rsi
x = 0;
(11) Se schimba rolul variabilelor t si x si rezulta t = ex + Ce−x, C ∈ R,x = 0;
(12) Se schimba rolul variabilelor t si x si rezulta t = (C − cosx) sinx,C ∈ R.
VII. Sa se integreze urmatoarele ecuatii sau probleme Cauchy:
(1) x′ = 4tx+ t
√x;
(2) x′ = −1tx− tx2;
(3) 2txx′ − x2 + t = 0;(4) x′ + 2x = x2et;(5) x′ = t
2(t2−1)x+ t
2x ;
(6)
{tx′ + x = x2 ln tx (1) = 1
;
(7)
{x′ − 9t2x = t2
(1 + t3
)x
23
x (0) = 0.
Solutii.
(1) x =(Ct2 + t2
2 ln |t|)2
, C ∈ R; x = 0;
(2) x (t) = 1t2+tC
, C ∈ R; x = 0;
(3) x2 = t ln∣∣Ct
∣∣ , C ∈ R; x = 0;
(4) x(Ce2t + et
)− 1 = 0, C ∈ R; x = 0;
(5) x2 = t2 − 1 + C√t2 − 1, C ∈ R; x = 0;
(6) x = 11+ln|t| ;
(7) x =(29e
t3 − 19 t
3 − 29
)3; y = 0.
VIII. Sa se integreze urmatoarele ecuatii diferentiale, stiind ca admitsolutii particulare de formele indicate:
(1) t2(x′ + x2
)− 2 (tx− 1) = 0, xp (t) =
at , a ∈ R;
(2) tx′ = x2 − (2t+ 1)x+ t2 + 2t, xp (t) = at+ b, a, b ∈ R;(3) x′ = −x2 + 1 + t2, xp (t) = at, a ∈ R;(4) t2x′ + (tx− 2)2 = 0, xp (t) =
at , a ∈ R;
(5) t2x′ − t2x2 − tx− 1 = 0, xp (t) =at , a ∈ R;

6
(6) x′ + x2 − 12t2
= 0, xp (t) =at , a ∈ R.
Solutii.
(1) xp (t) =2t , x (t) =
1−2Ct2
1−Ct , C ∈ R;(2) xp (t) = t, x (t) = t+ 1
1+Ct , C ∈ R;
(3) xp (t) = t, x (t) = t+ e−t2
C+∫e−t2dt
, C ∈ R;
(4) xp (t) =1t , x (t) =
1t +
3t2
t3+C, C ∈ R;
(5) xp (t) = −1t , x (t) = −1
t +1
t(C−ln|t|) , C ∈ R;(6) x (t) = 2t3−C
t(C+t3), C ∈ R.
IX. Sa se integreze urmatoarele ecuatii implicite ın raport cu derivata:
(1) x′2 + tx = x2 + tx′;(2) tx′ (tx′ + x) = 2x2;(3) tx′2 − 2xx′ + t = 0;(4) tx′2 = x (2x′ − 1) ;(5) x′3 + (t+ 2) ex = 0;(6) x′2 − 2tx′ = 8t2;
(7) (tx′ + 3x)2 = 7t;(8) t = x′3 + x′;(9) t
(x′2 − 1
)= 2x′;
(10) t = x′√x′2 + 1;
(11) x′ (t− lnx′) = 1;(12) x = x′2 + 2x′3;(13) x = ln
(1 + x′2
);
(14) x = tx′ − x′2;
(15) x+ tx′ = 4√x′;
(16) x = 2tx′ − 4x′3;(17) x′3 = 3 (tx′ − x) ;(18) x = tx′2 − 2x′3;(19) 2tx′ − x = lnx′.
Solutii.
(1) x = Cet, C ∈ R, x = ±t;(2) t2x = C, x = Ct, C ∈ R;(3) t2 + C2 = 2Cx,C ∈ R, x = ±t;
(4) (t+ C)2 = 4Cx, C ∈ R, x = 0, x = t;
(5) 4e−x3 = (t+ 2)
43 + C, C ∈ R;
(6) x = 2t2 + C, x = −t2 + C, C ∈ R;(7) x = Ct−3 ± 2
√t7 , C ∈ R;
(8)
{t = p3 + p4x = 3p4 + 2p2 + C
, C ∈ R;

7
(9)
{t = 2p
p2−1
x = 2p2−1
− ln∣∣p2 − 1
∣∣+ C, C ∈ R;
(10)
{t = p
√p2 + 1
3x =(2p2 − 1
)√p2 + 1 + C
, C ∈ R;
(11)
{t = ln p+ 1
p
x = p− ln p+ C, C ∈ R;
(12)
{t = 3p2 + 2p+ Cx = 2p3 + p2
, C ∈ R; x = 0;
(13)
{t = 2 arctg p+ Cx = ln
(1 + p2
) , C ∈ R; x = 0;
(14) x = Ct− C2, C ∈ R, 4x = t2;
(15)
{t√p = ln p+ C
x =√p (4− ln p− C)
, C ∈ R; x = 0;
(16)
{t = 3p2 + C
p2
x = 2p3 − 2Cp
, C ∈ R; x = 0;
(17) C3 = 3 (Ct− x) , C ∈ R, 9x2 = 4t3;
(18)
{t = C (p− 1)−2 + 2p+ 1
x = Cp2 (p− 1)−2 + p2, C ∈ R; x = 0, x = t− 2;
(19)
{tp2 = p+ Cx = 2 + 2C
p − ln p, C ∈ R.

Sisteme liniare de ordinul I
1. Sistemul liniar omogen
Fie I = [a, b] si A : I → Md (R) o functie matriceala continua, A (t) =(aij (t))i,j∈1,d, (∀) t ∈ I.
Consideram ecuatia diferentiala
x′ = A (t)x, (1)
pe care o vom numi sistem ecuatie liniar omogen de ordinul ıntai. Deremarcat din start ca (1) este un caz particular de ecuatie diferentiala deforma
x′ = f (t, x) ,
unde f (t, x) = A (t)x.De remarcat este ca functia f (t, x) fiind continua pe I ×Rd, sistemul (1)
admite solutii, conform unei teoreme de existenta.Putem sa prezentam (fara demonstratie) o teorema de existenta si unici-
tate pentru problema Cauchy (1) + (2), unde
x (a) = x0. (2)
Teorema 1. Problema Cauchy (1) + (2) are solutie unica definita peıntregul interval [a, b] .
Observatie 1. Conditia initiala (2) se poate ınlocui cu (3), unde
x (t0) = x0, t0 ∈ [a, b] (3)
si problema Cauchy (1) + (3) va avea solutie unica pe [a, b] .Teorema 2. Multimea solutiilor sistemului liniar si omogen formeaza un
spatiu vectorial.Demonstratie. Intr-adevar, sa notam cu
X :={x ∈ C1
(I,Rd
), x′ = A (t)x, t ∈ I
}multimea solutiilor sistemului (1) , unde
C1(I,Rd
)={x : I → Rd, x ∈ C1 pe I
}.
Fie x, y ∈ X si α, β ∈ R, arbitrare.Avem
x′ = A (t)x, y′ = A (t) y
si deci
(αx+ βy)′ = αx′ + βy′ = αA (t)x+ βA (t) y =
= A (t) (αx+ βy) , ∀t ∈ I,
adica αx+ βy ∈ X . Q.E.D.Teorema 3. X este izomorf cu Rd.Demonstratie. Definim aplicatia
Φ : Rd → X , Φ(x0)= x, ∀x0 ∈ Rd,
1

2
unde x este unica solutie a sistemului (1) cu conditia initiala x (a) = x0. Φeste bijectiva cu inversa
Φ−1 : X → Rd, Φ−1 (x) := x (a) , ∀x ∈ X
si morfism de spatii vectoriale (verificarea este un simplu exercitiu).Q.E.D.Corolar 1. dimX = d.Prin urmare, pentru a rezolva sistemul liniar si omogen (1) este suficient
sa gasim o baza (ce are cardinalul d) a lui X .Remarcam totodata faptul ca sistemul (1) admite totdeauna drept solutie
functia identic nula, pe care o vom numi solutie banala.Sa consideram ın cele urmeaza ecuatia matriceala
X ′ = A (t)X, (4)
unde X = (xij)i,j∈1,d este necunoscuta, si conditia initiala
X (τ) = C, (5)
unde τ ∈ I, iar C ∈ Md (R) este matrice constanta.Ecuatia matriceala (4) se poate scrie, ın fond, ca o ecuatie de tipul (1),
vectorul corespunzator avand d2 ın loc de d componente. Deci, rezultadin Teorema 1 ca problema Cauchy (4) + (5) are solutie unica definita peıntreg intervalul I. Si reciproc, daca d solutii ale ecuatiei (1) le asezam ıntr-un tablou matriceal, vom obtine o matrice care este solutie pentru ecuatia(4). Deci, a afla o baza a spatiului X este echivalent cu a afla o solutie
nesingulara a ecuatiei (4) . Insa neajunsul este ca nu totdeauna o astfel desolutie reprezinta o matrice nesingulara ın orice punct din I. Rezulta, ınmod firesc problema stabilirii cand o solutie a ecuatiei (4) este nesingularaın orice punct din I. Raspunsul la aceasta chestiune ni-l ofera urmatoareateorema.
Teorema 4 (Liouville). Fie X = X (t) o functie matriceala patratica deordin d, care satisface pe intervalul I ecuatia (4) . Atunci, notand cu
∆(t) := detX (t) ,
are loc relatia
∆(t) = ∆ (τ) e∫ tτ Tr A(s)ds, ∀t, τ ∈ I.
Corolar 2. Daca o matrice solutie a ecuatiei (4) este nesingulara ıntr-unpunct din I, atunci ea este nesingulara ın orice punct din I.
Definitie 1. Orice functie matriceala patratica de ordinul d, X = X (t) ,care satisface pe intervalul I ecuatia diferentiala matriceala (4)
X ′ (t) = A (t) ·X (t)
si care este nesingulara ın orice punct din I, se numeste matrice funda-mentala a sistemului (1) .

3
Fie X (t) = (xij (t))i,j∈1,d o matrice fundamentala. Notam
xj (t) =
x1j (t)x2j (t)...
xdj (t)
, j ∈ 1, d,
a j−a coloana a matricei X (t) . Din faptul ca X (t) satisface ecuatia (4),obtinem relatia
d
dt
(xj (t)
)= A (t)xj (t) , ∀j ∈ 1, d.
Altfel spus, fiecare coloana a matricei X (t) este o solutie a sistemului (1);cum X (t) este nesingulara, rezulta ca aceste solutii x1 (t) , x2 (t) , ..., xd (t)sunt liniar independente. Rezulta de aici ca orice matrice fundamentala aredrept coloane d solutii liniar independente ale sistemului (1) .
Proprietati ale matricilor fundamentale1) Exista o infinitate de matrici fundamentale.
Intr-adevar, daca C ∈ Md (R) este o matrice constanta si nesingulara,atunci solutia unica a problemei (4) + (5) este o matrice fundamentala.Cum exista o infinitate de matrici constante nesingulare si o infinitate deposibilitati de alegere a numarului τ ∈ I, va exista o infinitate de matricifundamentale. Q.E.D.
2) Daca doua matrici fundamentale coincid ıntr-un punct, atunci ele co-incid peste tot.
Aceasta proprietate este imediata, rezultand din Teorema 1 de existentasi unicitate. Q.E.D.
3) Daca ınmultim la dreapta o matrice fundamentala cu o matrice con-stanta, nesingulara, atunci obtinem tot o matrice fundamentala.
Intr-adevar, fie X (t) o matrice fundamentala si C ∈ Md (R) constanta sinesingulara. Notam cu Y (t) = X (t) · C.
Atunci,
Y ′ (t) = (X (t) · C)′ = X ′ (t) · C = (A (t)X (t))C = A (t) (X (t)C) =
= A (t)Y (t) .
Deci, Y (t) este solutie a ecuatiei (4). Fiind un produs de doua matricinesingulare, va fi nesingulara. Rezulta ca Y (t) este matrice fundamentala.Q.E.D.
Sa notam acum cu X (t; t0) unica solutie a ecuatiei (4) care ın t = t0coincide cu matricea unitate, Id.
Deoarece X (t; t0) este solutie a ecuatiei (4) si este nesingulara ıntr-unpunct, conform Corolarului 2 si Definitiei 1, X (t; t0) va fi tot o matricefundamentala.

4
2. Solutia generala a sistemului omogen
Sa consideram sistemul (1) ,
x′ = A (t)x
si ne propunem sa determinam solutia sa generala.Teorema 5. Solutia generala a sistemului (1) este data de formula
x (t) = X (t) · c, c ∈ Rd, (6)
unde X (t) este o matrice fundamentala a sistemului (1) .Demonstratie. Avem
(X (t) · c)′ = X ′ (t) · c = A (t) (X (t) · c) ,
deci (6) reprezinta pentru orice c ∈ Rd o solutie a ecuatiei (1) . Atasam acumsistemului (1) conditia initiala
x (t0) = x0, (7)
unde t0 ∈ I si x0 ∈ Rd sunt arbitrari. Din (6) gasim ecuatia
X (t0) · c = x0,
de unde rezulta
c = X−1 (t0) · x0. (8)
Astfel, luand ın (6) pe c dat de (8) , obtinem solutia problemei (1) + (7)sub forma
x (t) = X (t) ·X−1 (t0) · x0 = X (t; t0)x0.
Deci,
x (t) = X (t) · c, c ∈ Rd,
este solutia generala a ecuatiei (41) .Q.E.D.
Folosind Proprietatea 8) a matricilor fundamentale, gasim ca, de fapt,solutia generala a sistemului (1) este
x (t) = X0 (t) · ξ, ξ ∈ Rd. (9)
Pentru t = t0 rezulta ξ = x (t0) si deci
x (t) = X0 (t)x (t0) . (10)
In concluzie, solutia problemei Cauchy{x′ = A (t)xx (t0) = x0
(11)
este
x (t) = X (t)X−1 (t0)x0 = X (t; t0)x
0. (12)

5
3. Ssitemul liniar neomogen
Consideram sistemul
x′ = A (t)x+ f (t) , (13)
unde f ∈ C(I,Rd
); aceasta ecuatie poarta numele de sistemul liniara si
neomogen. Solutia generala a acestui sistemul o vom determina folosind,ca si la sistemul liniar neomogen de ordinul ıntai (scalara), metoda variatieiconstantelor.
Fie X (t) o matrice fundamentala; consideram solutia generala a sistemu-
lui omogen (1), data de relatia (6) . In aceasta relatie ıl vom considera pe c cafunctie de t. Din conditia ca x (t) = X (t) ·c (t) sa verifice ecuatia neomogenacu c = c (t), gasim
X ′ (t) c (t) +X (t) c′ (t) = A (t)X (t) c (t) + f (t) .
Dar
X ′ (t) = A (t)X (t) .
Deci, vom avea
c′ (t) = X−1 (f) f (t) ,
de unde o functie c (t) este
c (t) =
∫ t
t0
X−1 (s) f (s) ds.
Rezulta o solutie particulara a sistemului neomogen,
xp (t) = X (t) c (t) = X (t)
∫ t
t0
X−1 (s) f (s) ds =
=
∫ t
t0
X (t)X−1 (s) f (s) ds.
Insa este simplu de probat ca solutia generala a sistemului neomogen estesuma dintre solutia generala a sistemului omogen si o solutie particulara asistemului neomogen.
Deci, solutia generala a sistemului neomogen va fi
x (t) = X (t) · c+∫ t
t0
X (t)X−1 (s) f (s) ds, c ∈ Rd,
ın timp ce solutia problemei Cauchy{x′ = A (t)x+ f (t)x (t0) = x0
este
x (t) = X (t)X−1 (t0)x0 +
∫ t
t0
X (t)X−1 (s) f (s) ds, c ∈ Rd

6
sau
x (t) = X (t; t0)x0 +
∫ t
t0
X (t; s) f (s) ds, c ∈ Rd.
4. Sisteme liniare cu coeficienti constanti
Consideram sistemul
x′ = Ax, (14)
unde A = (aij)i,j∈1,d ∈ Md (R) este o matrice constanta. Remarcam din
start ca toate solutiile sistemului (14) sunt definite pe ıntreaga axa reala R.Deasemenea, deoarece functiile constante sunt continue, toate rezultatelereferitoare la cazul general raman, si ın acest caz, adevarate. Cum solutiagenerala a sistemului (14) este de forma
x (t) = X (t) · c, c ∈ Rd,
unde X (t) este o matrice fundamentala, scopul principal este sa gasim omatrice fundamentala a sistemului (14).
Cum solutia x este o functie derivabila, deoarece ea verifica (14), rezultaca
x′ (t) = Ax (t) , t ∈ Rsi deci x′ este derivabila. Prin derivare, ecuatia precedenta ne da
x′′ (t) = Ax′ (t) = A2x (t) , t ∈ R.
Analog obtinem ca x′′ este derivabila s.a.m.d. rezulta
x(n) (t) = Anx (t) , t ∈ R, n ∈ N.
Gasim
xn (0) = Anx (0) , n ∈ N.Daca dezvoltam ın serie Taylor ın jurul lui 0 solutia, obtinem
x (t) = x (0) +t
1!Ax (0) +
t2
2!A2x (0) + ...+
tn
n!Anx (0) + ... .
Avem estimarea ∣∣∣∣ tnn!An
∣∣∣∣ ≤ tn|A|n
n!, ∀n ∈ N, t ∈ R.
Deci, termenul general al seriei∞∑n=0
tnAn
n!(15)
este marginit ın norma de termenul general al unei serii de functii numericeuniform convergente pe orice compact al lui R,
∞∑n=0
tn|A|n
n!= et|A|.

7
Conform Teoremei lui Weierstrass asupra convergentei seriilor de functii,rezulta ca seria (15) este convergenta si vom nota cu etA (sau eAt) suma ei,
etA :=
∞∑n=0
tnAn
n!.
Asadar, solutia x (t) se va scrie sub forma
x (t) = etAx (0) .
Comparand relatiile (6) si (??), suntem ındreptatiti sa ne ıntrebam dacaetA este matrice fundamentala pentru ecuatia (14). Pentru aceasta, sa cal-culam (
etA)′(t) =
(Id +
t
1!A+
t2
2!A2 + ...+
tn
n!An + ...
)′(t) =
= A+t
1!A2 + ...+
tn−1
(n− 1)!An + ... =
=
(Id +
t
1!A+ ...+
tn−1
(n− 1)!An−1 + ...
)A =
= etAA.
Deci, etA este solutie a ecuatiei matriceale (4) ,
X ′ (t) = A (t)X (t) .
Pentru t = 0 obtinem
e0A = Id +0
1!A+
02
2!A2 + ...+
0n
n!An + ... = Id,
care este, evident, nesingulara.Rezulta, conform Corolarului 2, ca etA este matrice fundamentala a sis-
temului (14) .Concluzia importanta este ca solutia generala a sistemului (14) este
x (t) = etA · c, ∀c ∈ R.
4.1. Proprietati ale matricilor exponentiale. 1) Are loc relatia
e(t+s)A = etA · esA, ∀t, s ∈ R, A ∈ Md (R) .
Intr-adevar, avem succesiv,
etA · esA =
( ∞∑n=0
tnAn
n!
)·
( ∞∑m=0
smAm
m!
)=
=
∞∑p=0
∑n+m=p
tnsmAn
n!
Am
m!=
∞∑p=0
( ∑n+m=p
tnsm
n!m!
)Ap =
=
p∑p=0
(t+ s)p
p!Ap = e(t+s)A.

8
Q.E.D.2) Are loc relatia
esA · etA = etA · esA, ∀t, s ∈ R, A ∈ Md (R) .
Aceasta proprietate este o consecinta imediata a primei proprietati.Q.E.D.
3) Daca A, B sunt doua matrici care comuta (AB = BA), atunci are locrelatia
etA · etB = et(A+B), ∀t ∈ R, A ∈ Md (R) .
Intr-adevar, avem succesiv,
etA · etB =
( ∞∑n=0
tnAn
n!
)·
( ∞∑m=0
tmBm
m!
)=
=∞∑p=0
∑n+m=p
tpAn
n!
Bm
m!=
∞∑p=0
tp
( ∑n+m=p
AnBm
n!m!
)=
=
p∑p=0
tp
p!(A+B)p = et(A+B),
unde am tinut cont de ipoteza AB = BA ın∑n+m=p
AnBm
n!m!= (A+B)p .
Q.E.D.4) Are loc relatia(
etA)−1
= e−tA, ∀t ∈ R, A ∈ Md (R) .
Intr-adevar, din prima proprietate, facandu-l pe s = −t, obtinem
e0A = etA · e−tA,
deci (etA)−1
= e−tA.
Q.E.D.5) Au loc relatiile
etOd = e0A = Id, ∀t ∈ R, A ∈ Md (R) ,
unde Od este matricea nula de ordinul d si
etId = etId, ∀t ∈ R.
Aceste relatii se deduc imediat. Q.E.D.Solutia generala a sistemului omogen (14) este atunci
x (t) = e(t−t0)A · c, c ∈ Rd,

9
ın timp ce, pentru o functie f continua ıntr-o vecinatate a lui t0, solutiagenerala a sistemului liniar neomogen cu coeficienti constanti
x′ = Ax+ f (t)
este
x (t) = e(t−t0)A · c+∫ t
t0
e(t−s)Af (s) ds, c ∈ Rd
sau
x (t) = X0 (t− t0) · c+∫ t
t0
X0 (t− s) f (s) ds, c ∈ Rd.
Solutia problemei Cauchy omogene{x′ = Axx (t0) = x0
este
x (t) = e(t−t0)A · x0,iar solutia problemei Cauchy neomogene{
x′ = Ax+ f (t)x (t0) = x0
este
x (t) = e(t−t0)A · x0 +∫ t
t0
e(t−s)Af (s) ds, c ∈ Rd.
Exemple.1. Sa rezolvam sistemul liniar omogen cu coeficienti constanti{
x′1 = −x2x′2 = x1
.
Matricea sistemului este A =
(0 −11 0
), iar necunoscuta vectorul x =(
x1x2
).
Incercam sa determinam matricea fundamentala etA ca suma a seriei (15) .Avem
A2 =
(0 −11 0
)·(
0 −11 0
)= −I2,
A3 = −I2 ·A = −A, A4 = −A ·A = I2, A5 = A etc.
Deci
An =
I2, daca n = 4kA, daca n = 4k + 1−I2, daca n = 4k + 2−A, daca n = 4k + 3

10
iar
etA = I2 +t
1!A− t2
2!I2 −
t3
3!A+
+t4
4!I2 +
t5
5!A− t6
6!I2 −
t7
7!A+ ...
=
(1− t2
2! +t4
4! − ... − t1! +
t3
3! −t5
5! + ...t1! −
t3
3! +t5
5! − ... 1− t2
2! +t4
4! − ...
)=
=
(cos t − sin tsin t cos t
).
Solutia generala a ecuatiei considerate va fi(x1 (t)x2 (t)
)=
(cos t − sin tsin t cos t
)(C1
C2
), C1, C2 ∈ R
sau {x1 (t) = C1 cos t− C2 sin tx2 (t) = C1 sin t+ C2 cos t
, C1, C2 ∈ R.
2. Sa rezolvam ecuatia liniara vectoriala (sistemul) omogena cu coeficienticonstanti {
x′1 = x1 + x2x′2 = x2
.
Matricea sistemului este A =
(1 10 1
), iar necunoscuta vectorul x =(
x1x2
).
AvemetA = et(I2+B),
unde
B =
(0 10 0
).
Cum I2B = BI2, rezulta, conform Proprietatilor 3) si 5) ale matricilorexponentiale,
etA = etI2 · etB = etetB.
Dar, evident,B2 = O2, Bn = O2, ∀n ≥ 3,
rezulta ca
etB = I2 +t
1!B =
(1 00 1
)+
t
1!
(0 10 0
)=
=
(1 t0 1
).
Rezulta
etA = et(
1 t0 1
)=
(et tet
0 et
).

11
Solutia generala a sistemului considerat va fi(x1 (t)x2 (t)
)=
(et tet
0 et
)(C1
C2
), C1, C2 ∈ R
sau {x1 (t) = C1e
t + C2tet
x2 (t) = C2et , C1, C2 ∈ R.
De remarcat este ca putem determina matricea etA si direct, pornind dela definitie, deoarece prin inductie se probeaza rapid ca
An =
(1 n0 1
), n ≥ 1,
si deci
etA =∞∑n=0
tn
n!
(1 n0 1
)=
=
∞∑n=0
tn
n!
∞∑n=0
ntn
n!
0∞∑n=0
tn
n!
=
et t∞∑n=1
tn−1
(n−1)!
0 et
=
=
(et tet
0 et
).
5. Metoda lui Euler de determinare a unei matricifundamentale
Consideram sistemul (14)x′ = Ax,
unde A = (aij)i,j∈1,d ∈ Md (R) este o matrice constanta.
Dupa cum am vazut ın sectiunea precedenta, elementele matricei funda-mentale sunt combinatii liniare de eλt, unde λ este valoare proprie, coeficientiifiind polinoame ın t. Astfel, vom considera pe rand cate o valoare proprie,ımpreuna cu multiplicitatea ei algebrica; fiecare valoare proprie va generaın matricea fundamentala un numar de coloane egal cu multiplicitatea saalgebrica.
Cazul I. λ este valoare proprie simpla.Cautam solutii de forma x = γeλt, unde λ este o valoare proprie a matricei
A si γ ∈ Rd, γ = 0. Atunci,
λγeλt = Aγeλt
si, prin simplificare cu eλt, γ verifica sistemul
(A− λId) γ = 0,
care este un sistem de d ecuatii cu o necunoscuta secundara si d − 1 ne-cunoscute principale, compatibil simplu nedeterminat si din care vom aflao coloana γ depinzand de o singura constanta. Putem determina o solutie

12
prin particularizarea constantei sau nu (evident, γ este un vector propriucorespunzator valorii proprii λ).
Cazul II. λ este valoare proprie multipla.Sa notam cu
r : = rang (A− λId) ,
m : = ordinul de multiplicitate algebrica a lui λ.
Evident, ın Cazul II, m > 1.Avem adevarata relatia
r ≥ d−m,
de unde distingem urmatoarele doua subcazuri.Cazul II.1. Daca r = d−m, atunci cautam din nou m solutii de forma
x = γeλt.Introducand ın ecuatia (14), rezulta (dupa simplificarea lui eλt) un sis-
tem de d ecuatii cu m necunoscute secundare si r necunoscute principale,compatibil m−nedeterminat din care vom afla m coloane γ si anume
(A− λId) γ = 0.
Putem determina m solutii prin particularizarea constantelor sau nu.Cazul II.2. Daca r > d−m, atunci cautam m solutii de forma
x1 (t) = P1 (t) eλt
x2 (t) = P2 (t) eλt
..........................xd (t) = Pd (t) e
λt
,
unde Pi, i ∈ 1, d sunt polinoame de grad cel mult m − 1. Introducand ınecuatia (14) rezulta un sistem de d ·m ecuatii cu m necunoscute secundaresi (d− 1) ·m necunoscute principale, compatibil m−nedeterminat din carevom afla m coloane γ. Putem determina m solutii prin particularizareaconstantelor sau nu.
Observatie 2. Una sau mai multe valori proprii λp pot fi complexe. Insa,cum functiile cu care operam sunt reale, ar fi ideal ca matricea fundamentalasa aiba numai elemente functii reale.
Pentru aceasta sa remarcam ca, daca ıntr-o matrice fundamentala ınlocuimdoua coloane prin doua combinatii liniar independente ale lor, matriceaobtinuta este tot fundamentala.
Intr-adevar, prin aceste combinatii liniar independente, rangul matriciinu se modifica; ın plus, noile coloane sunt tot solutii ale sistemului omogen(14), deoarece orice combinatie liniara efectuata cu solutii ale sistemuluiliniar omogen este tot o solutie a sistemului liniar omogen (spatiul solutiiloracestui sistem este vectorial).
Sa aratam cum vom obtine o matrice fundamentala formata numai dinfunctii reale.
Sa presupunem, pentru aceasta ca avem o valoare proprie complexa, λp =
αp + iβp, cu ordinul de multiplicitate µp. Este evident atunci ca si λp =

13
αp− iβp este tot valoare proprie, cu acelasi ordin de multiplicitate algebrica,µp.
Celor doua radacini λp si λp le corespund doua blocuri Jordan ın matriceacanonica Jordan si vor genera ın matricea fundamentala X (t) 2µp coloane.
Fara a restrange generalitatea, ci doar schimband eventual numerotarea,putem presupune ca cele doua valori proprii sunt λ1 si conjugata sa, λ2,fiecare cu ordinul de multiplicitate µ1 (prin aceasta renumerotare, ın ma-tricea fundamentala doar se schimba ıntre ele unele coloane si astfel aceastaoperatie ne conduce tot la o matrice fundamentala).
Vom ınlocui atunci coloanele xj si, respectiv xj+µ1 prin
xj + xj+µ1
2,xj − xj+µ1
2i, j ∈ 1, µ1.
Procedand analog cu toate coloanele corespunzatoare unor valori propriicomplexe, vom obtine ın definitiv o matrice fundamentala formata numaidin functii reale.
Exemple.1. Sa se rezolve sistemul x′1 = 4x1 − x2 − x3
x′2 = x1 + 2x2 − x3x′3 = x1 − x2 + 2x3
.
Solutie.Aflam o matrice fundamentala a sistemului.Matricea sistemului este
A =
4 −1 −11 2 −11 −1 2
.
Polinomul caracteristic,
P (λ) = det (A− λI3) =
∣∣∣∣∣∣4− λ −1 −11 2− λ −11 −1 2− λ
∣∣∣∣∣∣ == −λ3 + 8λ2 − 21λ+ 18
are radacinile λ1 = 2, λ2 = λ3 = 3.Pentru λ1 = 2 suntem ın cazul I si obtinem sistemul
(A− 2I3) γ = 0
sau 2 −1 −11 0 −11 −1 0
γ1γ2γ3
=
000
,
adica 2γ1 − γ2 − γ3 = 0γ1 − γ3 = 0γ1 − γ2 = 0
.

14
Alegem necunoscute principale γ1, γ2 si necunoscuta secundara γ3, careiaıi dam valoarea 1. Rezulta γ1 = γ3 = 1 si prima coloana din matriceafundamentala determinata de λ1 = 2 este
x1 (t) =
e2t
e2t
e2t
.
Pentru λ2 = λ3 = 3 avem d = 3, m = 2,
r = rang (A− 3I3) = rang
1 −1 −11 −1 −11 −1 −1
= 1
si cum
r = d−m,
rezulta ca suntem ın cazul II.1. si obtinem sistemul
(A− 3I3) γ = 0
sau 1 −1 −11 −1 −11 −1 −1
γ1γ2γ3
=
000
,
adica γ1 − γ2 − γ3 = 0γ1 − γ2 − γ3 = 0γ1 − γ2 − γ3 = 0
.
Alegem necunoscuta principala γ1 si necunoscute secundare γ2, γ3.Pentru γ2 = 1, γ3 = 0 avem γ1 = 1 si a doua coloana din matricea
fundamentala este
x2 (t) =
e3t
e3t
0
;
pentru γ2 = 0, γ3 = 1 avem γ1 = 1 si a treia coloana din matricea funda-mentala este
x3 (t) =
e3t
0e3t
.
Astfel am gasit o matrice fundamentala,
X (t) =
e2t e3t e3t
e2t e3t 0e2t 0 e3t
.

15
Solutia generala a sistemului este x1 (t)x2 (t)x3 (t)
=
e2t e3t e3t
e2t e3t 0e2t 0 e3t
C1
C2
C3
=
=
e2tC1 + e3tC2 + e3tC3
e2tC1 + e3tC2
e2tC1 + e3tC3
, C1, C2, C3 ∈ R
sau x1 (t) = e2tC1 + e3tC2 + e3tC3
x2 (t) = e2tC1 + e3tC2
x3 (t) = e2tC1 + e3tC3
, C1, C2, C3 ∈ R.
2. Sa se rezolve sistemul {x′1 = 3x1 − x2x′2 = 4x1 − x2
.
Solutie.Matricea sistemului este
A =
(3 −14 −1
).
Polinomul caracteristic,
P (λ) = det (A− λI2) =
∣∣∣∣ 3− λ −14 −1− λ
∣∣∣∣ == λ2 − 2λ+ 1
are radacinile λ1 = λ2 = 1.Pentru λ1 = λ2 = 1 avem d = 2, m = 2,
r = rang (A− I2) = rang
(2 −14 −2
)= 1
si cum
r > d−m,
rezulta ca suntem ın Cazul II.2.; prin urmare, vom cauta solutii de forma{x1 (t) = P1 (t) e
t
x2 (t) = P2 (t) et ,
unde P1 (t) si P2 (t) sunt polinoame de grad cel mult m− 1 = 1.Fie {
x1 (t) = (a1t+ b1) et
x2 (t) = (a2t+ b2) et , a1, a2, b1, b2 ∈ R.

16
Inlocuind ın sistemul dat gasim dupa simplificarea lui et din ambele ecuatiisi identificarea coeficientilor corespunzatori puterilor lui t,
a1 + b1 = 3b1 − b2a1 = 3a1 − a2a2 + b2 = 4b1 − b2a2 = 4a1 − a2
,
care este un sistem compatibil dublu nedeterminat. Luand a1, b1 necunos-cute secundare, avem {
b2 = 2b1 − a1a2 = 2a1
.
Prin urmare,{x1 (t) = (a1t+ b1) e
t
x2 (t) = (2a1t+ 2b1 − a1) et , a1, b1 ∈ R, (16)
care reprezinta solutia generala a sistemului dat.Daca dorim sa aflam o matrice fundamentala a sistemului, citim coeficientii
lui a1 si b1 din (416) pe coloane, ıncarcand astfel matricea fundamentala
X (t) =
(tet et
(2t− 1) et 2et
).
3. Sa se rezolve sistemul {x′′ = 2yy′′ = −2x
.
Solutie.Acest sistem de ordinul al doilea se poate transforma ıntr-un sistem de
ordinul ıntai avand 4 ecuatii si 4 necunoscute x1, x2, x3, x4, astfel:x1 = xx2 = x′
x3 = yx4 = y′
.
Rezulta x′1 = x′ = x2x2 = x′′ = 2y = 2x3x′3 = y′ = x4x′4 = y′′ = −2x = −2x1
,
care are matricea sistemului
A =
0 1 0 00 0 2 00 0 0 1−2 0 0 0
.
Valorile proprii sunt toate distincte,
λ1 = 1 + i, λ2 = 1− i, λ3 = −1 + i, λ4 = −1− i.

17
Pentru λ1 = 1 + i, obtinem ın matricea fundamentala coloana complexaet cos t+ iet sin t
et (cos t− sin t) + iet (sin t+ cos t)−et sin t+ iet cos t
−et (cos t+ sin t) + iet (cos t− sin t)
.
Pentru λ2 = 1− i, obtinem ın matricea fundamentala coloana complexaet cos t− iet sin t
et (cos t− sin t)− iet (sin t+ cos t)−et sin t− iet cos t
−et (cos t+ sin t)− iet (cos t− sin t)
.
Pentru λ3 = −1+ i, obtinem ın matricea fundamentala coloana complexae−t
2 (− cos t+ sin t)− i e−t
2 (sin t+ cos t)e−t cos t+ ie−t sin t
e−t
2 (− cos t− sin t)− i e−t
2 (sin t− cos t)e−t sin t− ie−t cos t
.
Pentru λ4 = −1− i, obtinem ın matricea fundamentala coloana complexae−t
2 (− cos t+ sin t) + i e−t
2 (sin t+ cos t)e−t cos t− ie−t sin t
e−t
2 (− cos t− sin t) + i e−t
2 (sin t− cos t)e−t sin t+ ie−t cos t
.
O matrice fundamentala cu functii reale este atunci
X (t) =(x1 (t) x2 (t) x3 (t) x4 (t)
),
unde
x1 (t) =
et cos t
et (cos t− sin t)−et sin t
−et (cos t+ sin t)
,
x2 (t) =
et sin t
et (sin t+ cos t)et cos t
et (cos t− sin t)
,
x3 (t) =
e−t
2 (− cos t+ sin t)e−t cos t
e−t
2 (− cos t− sin t)e−t sin t
,
x4 (t) =
e−t
2 (sin t+ cos t)e−t sin t
− e−t
2 (sin t− cos t)−e−t cos t
.

18
Prin urmare, solutia generala este
x1 (t) = C1et cos t+ C2e
t sin t+
+C3e−t
2(− cos t+ sin t)− C4
e−t
2(sin t+ cos t) ,
x2 (t) = C1et (cos t− sin t) + C2e
t (sin t+ cos t) +
+C3e−t cos t+ C4e
−t sin t,
x3 (t) = −C1et sin t+ C2e
t cos t+
+C3e−t
2(− cos t− sin t)− C4
e−t
2(sin t− cos t) ,
x4 (t) = −C1et (cos t+ sin t) + C2e
t (cos t− sin t) +
+C3e−t sin t− C4e
−t cos t,
C1, C2, C3, C4 ∈ R, iar solutia generala a sistemului dat este
x (t) = C1et cos t+ C2e
t sin t+
+C3e−t
2(− cos t+ sin t)− C4
e−t
2(sin t+ cos t) ,
y (t) = −C1et sin t+ C2e
t cos t+
+C3e−t
2(− cos t− sin t)− C4
e−t
2(sin t− cos t) ,
C1, C2, C3, C4 ∈ R.

Ecuatii diferentiale ordinareTema 5 - Sisteme liniare de ordinul I
Sa se rezolve urmatoarele sisteme cu coeficienti constanti:
(1)
{x′1 = x2x′2 = x1
;
(2)
x′1 = x1 − x2 + x3x′2 = x1 + x2 − x3x′3 = 2x1 − x2
, λ1 = 1, λ2 = 2, λ3 = −1;
(3)
x′1 = x1 − 2x2 − x3x′2 = x2 − x1 + x3x′3 = x1 − x3
, λ1 = 0, λ2 = 2, λ3 = −1;
(4)
x′1 = 3x1 − x2 + x3x′2 = x1 + x2 + x3x′3 = 4x1 − x2 + 4x3
, λ1 = 1, λ2 = 2, λ3 = 5;
(5)
x′1 = 4x2 − 2x3 − 3x1x′2 = x1 + x3x′3 = 6x1 − 6x2 + 5x3
, λ1 = 1, λ2 = 2, λ3 = −1;
(6)
x′1 = x1 − x2 − x3x′2 = x1 + x2x′3 = 3x1 + x3
, λ1 = 1, λ2,3 = 1± 2i;
(7)
x′1 = 2x1 + x2x′2 = x1 + 3x2 − x3x′3 = 2x2 + 3x3 − x1
, λ1 = 2, λ2,3 = 3± i;
(8)
x′1 = 2x1 + 2x3 − x2x′2 = x1 + 2x3x′3 = x2 − 2x1 − x3
, λ1 = 1, λ2,3 = ±i;
(9)
x′1 = 4x1 − x2 − x3x′2 = x1 + 2x2 − x3x′3 = x1 − x2 + 2x3
, λ1 = 2, λ2,3 = 3;
(10)
x′1 = 2x1 − x2 − x3x′2 = 3x1 − 2x2 − 3x3x′3 = 2x3 − x1 + x2
, λ1 = 0, λ2,3 = 1;
(11)
x′1 = −2x1 + x2 − 2x3x′2 = x1 − 2x2 + 2x3x′3 = 3x1 − 3x2 + 5x3
, λ1 = 3, λ2,3 = −1;
(12)
x′1 = 3x1 − 2x2 − x3x′2 = 3x1 − 4x2 − 3x3x′3 = 2x1 − 4x2
, λ1,2 = 2, λ3 = −5;
(13)
x′1 = x1 − x2 + x3x′2 = x1 + x2 − x3x′3 = 2x3 − x2
, λ1,2 = 1, λ3 = 2;
1

2
(14)
x′1 = x2 − 2x3 − x1x′2 = 4x1 + x2x′3 = 2x1 + x2 − x3
, λ1 = 1, λ2,3 = −1;
(15)
x′1 = 2x1 + x2x′2 = 2x2 + 4x3x′3 = x1 − x3
, λ1,2 = 0, λ3 = 3;
(16)
x′1 = 2x1 − x2 − x3x′2 = 2x1 − x2 − 2x3x′3 = 2x3 − x1 + x2
, λ1,2,3 = 1;
(17)
x′1 = 4x1 − x2x′2 = 3x1 + x2 − x3x′3 = x1 + x3
, λ1,2,3 = 2;
(18)
{x′′ = yy′′ = x
.
Solutii.
(1)
{x1 (t) = C1 ch t+ C2 sh tx2 (t) = C1 sh t+ C2 ch t
, C1, C2 ∈ R;
(2)
x1 (t) = C2e2t + C3e
3t
x2 (t) = C1et + C2e
2t
x3 (t) = C1et + C2e
2t + C3e3t
, C1, C2, C3 ∈ R;
(3)
x1 (t) = C1 + 3C2e2t
x2 (t) = −2C2e2t + C3e
−t
x3 (t) = C1 + C2e2t − 2C3e
−t, C1, C2, C3 ∈ R;
(4)
x1 (t) = C1et + C2e
2t + C3e5t
x2 (t) = C1et − 2C2e
2t + C3e5t
x3 (t) = −C1et − 3C2e
2t + 3C3e5t
, C1, C2, C3 ∈ R;
(5)
x1 (t) = C1et + C3e
−t
x2 (t) = C1et + C2e
2t
x3 (t) = 2C2e2t − C3e
−t, C1, C2, C3 ∈ R;
(6)
x1 (t) = et (2C2 sin 2t+ 2C3 cos 2t)x2 (t) = et (C1 − C2 cos 2t+ C3 sin 2t)x3 (t) = et (−C1 − 3C2 cos 2t+ 3C3 sin 2t)
, C1, C2, C3 ∈ R;
(7)
x1 (t) = C1e2t + e3t (C2 cos t+ C3 sin t)
x2 (t) = e3t [(C2 + C3) cos t+ (C3 − C2) sin t]x3 (t) = C1e
2t + e3t [(C2 + C3) cos t+ (C2 + 2C3) sin t], C1, C2,
C3 ∈ R;
(8)
x1 (t) = C2 cos t+ (C2 + 2C3) sin tx2 (t) = 2C1e
t + C2 cos t+ (C2 + 2C3) sin tx3 (t) = C1e
t + C3 cos t− (C2 + C3) sin t, C1, C2, C3 ∈ R;
(9)
x1 (t) = C1e2t + (C2 + C3) e
3t
x2 (t) = C1e2t + C2e
3t
x3 (t) = C1e2t + C3e
3t, C1, C2, C3 ∈ R;

3
(10)
x1 (t) = C1 + C2et
x2 (t) = 3C1 + C3et
x3 (t) = −C1 + (C2 − C3) et
, C1, C2, C3 ∈ R;
(11)
x1 (t) = C1e3t + C2e
−t
x2 (t) = −C1e3t + (C2 + 2C3) e
−t
x3 (t) = −3C1e3t + C3e
−t, C1, C2, C3 ∈ R;
(12)
x1 (t) = C1e2t + C3e
−5t
x2 (t) = C2e2t + 3C3e
−5t
x3 (t) = (C1 − 2C2) e2t + 2C3e
−5t, C1, C2, C3 ∈ R;
(13)
x1 (t) = (C1 + C2t) et + C3e
2t
x2 (t) = (C1 − 2C2 + C2t) et
x3 (t) = (C1 − C2 + C2t) et + C3e
2t, C1, C2, C3 ∈ R;
(14)
x1 (t) = (C2 + C3t) e−t
x2 (t) = 2C1et − (2C2 + C3 + 2C3t) e
−t
x3 (t) = C1et − C3 (C2 + C3 + C3t) e
−t, C1, C2, C3 ∈ R;
(15)
x1 (t) = C1 + C2t+ 4C3e3t
x2 (t) = C2 − 2C1 − 2C2t+ 4C3e3t
x3 (t) = C1 − C2 + C2t+ C3e3t
, C1, C2, C3 ∈ R;
(16)
x1 (t) = (C1 + C3t) et
x2 (t) = (C2 + 2C3t) et
x3 (t) = (C1 − C2 − C3 − C3t) et
, C1, C2, C3 ∈ R;
(17)
x1 (t) =(C1 + C2t+ C3t
2)e2t
x2 (t) =[2C1 − C2 + (2C2 − 2C3) t+ 2C3t
2]e2t
x3 (t) =[C1 − C2 + 2C3 + (C2 − 2C3) t+ C3t
2]e2t
, C1,2,3 ∈ R;
(18)
{x (t) = C1e
t + C2e−t + C3 cos t+ C4 sin t
y (t) = C1et + C2e
−t − C3 cos t− C4 sin t, C1, C2, C3, C4 ∈ R.

Ecuatii liniare de ordin superior
1. Ecuatia omogena si ecuatia neomogena
Fie J = [a, b] si ai, h : J → R, functii continue, i ∈ 1, d, d ≥ 2. Con-sideram ecuatiile
x(d) + a1 (t)x(d−1) + a2 (t)u
(d−2) + ...+ ad (t)x = 0 (1)
si
x(d) + a1 (t)x(d−1) + a2 (t)u
(d−2) + ...+ ad (t)x = h (t) . (2)
Aceste ecuatii se numesc ecuatia liniara omogena, respectiv neomogena,de ordin d.
Daca vom defini operatorul L : Cd (J) → R,
L [x] (t) :=ddx
dtd+ a1 (t)
dd−1x
dtd−1+ a2 (t)
dd−2x
dtd−2+ ...+ ad (t)x,
atunci ecuatiile anterioare se mai scriu
L [x] = 0, (3)
respectiv
L [x] = h. (4)
Dupa cum se poate observa foarte simplu, L satisface proprietatea
L [αx+ βy] = αL [x] + βL [y] , ∀x, y ∈ Cd (J) , α, β ∈ R,
care ne arata ca L este un operator liniar.Prin urmare, cum spatiul solutiilor ecuatiei omogene este Ker L, el va fi
finit dimensional.Forma conditiilor initiale care se pot atasa ecuatiei (1) sau (2) este
x (t0) = x00, x′ (t0) = x01, ..., x(d−1) (t0) = x0d−1. (5)
Urmatoarele proprietati sunt imediate si verificarea lor este lasata caexercitiu.
(1) Suma dintre o solutie a ecuatiei omogene si o solutie a ecuatiei neo-mogene este o solutie a ecuatiei neomogene.
(2) Diferenta dintre doua solutii ale ecuatiei neomogene este o solutie aecuatiei omogene.
(3) Suma dintre solutia generala a ecuatiei omogene si o solutie par-ticulara a ecuatiei neomogene constituie solutia generala a ecuatieineomogene.
1

2
2. Legatura dintre ecuatiile de ordin d si ordin ıntai
Orice ecuatie de ordinul d se poate scrie ca un sistem de d ecuatii deordinul ıntai; ın cazul unei ecuatii liniare, sistemul obtinut va fi tot unsistem liniar. Intr-adevar, daca punem
y1 = x, y2 = x′, ..., yd = x(d−1), y =
x1x2...xd
,
A (t) =
0 1 0 0 ... 00 0 1 0 ... 0... ... ... ... ... ...0 0 0 0 ... 1
−ad −ad−1 −ad−2 −ad−3 ... −a1
,
f (t) =
00...h
atunci ecuatiile (1) si (2) se scriu, respectiv, sub forma
y′ = A (t) y, (6)
y′ = A (t) y + f (t) . (7)
Deci, problemele (1) + (5) si (2) + (5) au solutie unica, solutie care estedefinita pe ıntreg intervalul [a, b] . Rezolvand ecuatia (6) sau (7), primacomponenta a solutiei y va reprezenta solutia ecuatiei (1), respectiv (2) .
3. Dependenta si independenta liniara
Datorita legaturii care exista ıntre ecuatia (1) si sistemul (7), legaturaspecificata mai sus, rezulta ca solutiile ecuatiei (1) formeaza un spatiu liniarde dimensiune d, i.e.
dim Ker L = d.
Deci, daca x1, x2, ..., xd sunt solutii liniar independente, ele formeaza o bazaın spatiul solutiilor si astfel orice solutie x = x (t) a ecuatiei (1) se scrie subforma unei combinatii liniare de functiile x1, x2, ..., xd,
x (t) = C1x1 (t) + C2x2 (t) + ...+ Cdxd (t) , C1, C2, ..., Cd ∈ R. (8)
Altfel spus, (8) reprezinta chiar solutia generala a ecuatiei (1) .Se pune ın mod natural problema determinarii unui criteriu eficient care
sa stabileasca daca d solutii x1, x2, ..., xd sunt liniar independente. Pentruaceasta prezentam definitia notiunii de wronskian al unui sistem de functii.

3
Definitie 1. Daca {x1, x2, ..., xd} este un sistem de d functii derivabilede d− 1 ori pe [a, b] , atunci numim wronskian al acestui sistem urmatoruldeterminant:
W [x1, x2, ..., xd] (t) =
∣∣∣∣∣∣∣∣x1 (t) x2 (t) ... xd (t)x′1 (t) x′2 (t) ... x′d (t)... ... ... ...
x(d−1)1 (t) x
(d−1)2 (t) ... x
(d−1)d (t)
∣∣∣∣∣∣∣∣ , (9)
t ∈ [a, b] .Reamintim ca un sistem de d functii {x1, x2, ..., xd} este liniar indepen-
dent pe intervalul [a, b] daca oricare ar fi constantele reale C1, C2, ..., Cd
astfel ıncat
C1x1 (t) + C2x2 (t) + ...+ Cdxd (t) = 0, ∀t ∈ [a, b] ,
avem
C1 = C2 = ... = Cd = 0;
de asemenea, un sistem de d functii {x1, x2, ..., xd} este liniar dependentpe intervalul [a, b] daca nu este liniar independent, i.e. exista constanteleC1, C2, ..., Cd, nu toate nule, astfel ıncat
C1x1 (t) + C2x2 (t) + ...+ Cdxd (t) = 0, ∀t ∈ [a, b] .
Teorema 1. Daca wronskianul sistemului {x1, x2, ..., xd} nu este iden-tic nul pe intervalul [a, b], atunci sistemul {x1, x2, ..., xd} este liniar inde-pendent pe intervalul [a, b] .
Demonstratie. Intr-adevar, daca prin absurd sistemul {x1, x2, ..., xd}ar fi liniar depenedent, atunci ar exista o combinatie liniara nula pe [a, b] ,cu nu toti coeficientii nuli,
C1x1 (t) + C2x2 (t) + ...+ Cdxd (t) = 0, ∀t ∈ [a, b] .
Prin derivari succesive pana la ordinul d − 1 a ecuatiei precedente siadunarea relatiilor gasite, rezulta
C1
x1 (t)x′1 (t)...
x(d−1)1 (t)
+ C2
x2 (t)x′2 (t)...
x(d−1)2 (t)
+ ...+ Cd
xd (t)x′d (t)...
x(d−1)d (t)
= 0,
oricare ar fi t ∈ [a, b] . Deci, avem o combinatie nula pe [a, b] a coloanelorlui W [x1, x2, ..., xd] cu nu toti coeficientii nuli. Deci, W [x1, x2, ..., xd] va fiidentic nul pe [a, b], contrar ipotezei.
Rezulta fals, presupunere falsa si deci {x1, x2, ..., xd} este liniar indepen-dent. Q.E.D.
Observatie 1. Reciproca Teoremei 1 nu este adevarata.

4
Intr-adevar, daca vom considera d = 1, J = [−1, 1] ,
x1 (t) =
{t2, daca t ∈ [−1, 0]0, daca t ∈ [0, 1]
,
x2 (t) =
{0, daca t ∈ [−1, 0]t2, daca t ∈ [0, 1]
,
atunci avem
W [x1, x2] (t) = 0, ∀t ∈ [−1, 1]
si {x1, x2} este liniar independent pe [−1, 1] .
In cazul ın care {x1, x2, ..., xd} este un sistem de solutii ale ecuatiei (1),atunci wronskianul lui are o proprietate foarte importanta, care se deducedin Teorema lui Liouville aplicata ecuatiei (6) .
Intr-adevar, daca notam
X (t) =
x1 (t) x2 (t) ... xd (t)x′1 (t) x′2 (t) ... x′d (t)... ... ... ...
x(d−1)1 (t) x
(d−1)2 (t) ... x
(d−1)d (t)
,
atunci, cum aceasta matrice are pe coloane solutii ale ecuatiei (6), putemsa-i aplicam Teorema lui Liouville.
Deoarece
∆ (t) := detX (t) = W [x1, x2, ..., xd] (t)
si
Tr A (t) = −a1 (t) ,
rezulta relatia
W (t) = W (t0) · e−
∫ tt0
a1(s)ds, ∀t ∈ [a, b] , (10)
t0 ∈ [a, b] fiind arbitrar.Cu alte cuvinte, daca wronskianul unui sistem de d solutii este diferit de
zero ıntr-un punct t0 ∈ [a, b], atunci el este diferit de zero pe ıntregul interval[a, b] si sistemul {x1, x2, ..., xd} este liniar independent pe [a, b] .
Acest fapt ne conduce la urmatoarea definitie.Definitie 2. Un sistem de d solutii liniar independente ale ecuatiei (1)
se numeste sistem fundamental de solutii pe intervalul [a, b] pentruecuatia (1).
In cazul ın care {x1, x2., ..., xd} este un sistem de solutii ale ecuatii (1) ,atunci avem urmatoarea teorema.
Teorema 2. Conditia necesara si suficienta pentru ca un sistem de dfunctii {x1, x2, ..., xd} sa fie sistem fundamental de solutii pe intervalul[a, b] pentru ecuatia (1) este ca wronskianul sistemului {x1, x2, ..., xd} sanu fie identic nul pe intervalul [a, b] .
Demonstratie.

5
Suficienta a fost deja demonstrata ın cadrul Teoremei 1.Necesitatea. Intr-adevar, sa presupunem ca sistemul {x1, x2., ..., xd}
este un sistem fundamental de solutii al ecuatiei (1) pe [a, b]. Atunci {x1,x2, ..., xd} este liniar independent ın Ker L, formand o baza a acestui spatiu.Rezulta ca pentru orice element x ∈ Ker L, care este solutie a ecuatieiomogene, exista un unic sistem de constante C1, C2, ..., Cd, astfel ıncat pe[a, b] sa avem
x = C1x1 + C2x2 + ...+ Cdxd. (11)
Fie t0 ∈ [a, b] un punct oarecare si sa notam valorile solutiei x si ale
derivatelor sale, x′, ..., x(d−1) ın punctul t0, astfel:
x00 = x (t0) , x01 = x′ (t0) , ..., x0d = x(d−1) (t0) .
Derivand succesiv pana la ordinul d−1 ın raport cu t relatia (11) si luandvaloarea pentru fiecare functie ın punctul t0, obtinem urmatorul sistem derelatii:
x00 = C1x1 (t0) + C2x2 (t0) + ...+ Cdxd (t0)x01 = C1x
′1 (t0) + C2x
′2 (t0) + ...+ Cdx
′d (t0)
..................................................................................
x0d = C1x(d−1)1 (t0) + C2x
(d−1)2 (t0) + ...+ Cdx
(d−1)d (t0)
. (12)
Vom arata ca sistemul algebric (12) admite solutie unica si anume C1,C2, ..., Cd care intervin ın relatia (11).
Intr-adevar, daca sistemul (12) ar mai avea o solutie C1, C2, ..., Cd, atunciea ar defini un element x ∈ Ker L si anume
x = C1x1 + C2x2 + ...+ Cdxd. (13)
Atunci, derivand succesiv relatia (13) si luand valorile functiilor ın t0,obtinem
x (t0) = C1x1 (t0) + C2x2 (t0) + ...+ Cdxd (t0)x′ (t0) = C1x
′1 (t0) + C2x
′2 (t0) + ...+ Cdx
′d (t0)
..................................................................................
x(d−1) (t0) = C1x(d−1)1 (t0) + C2x
(d−1)2 (t0) + ...+ Cdx
(d−1)d (t0)
.(14)
Deoarece atat C1, C2, ..., Cd cat si C1, C2, ..., Cd sunt solutii ale sistemului(12), comparand (12) si (14), obtinem
x (t0) = x (t0) , x′ (t0) = x′ (t0) , ..., x(d−1) (t0) = x(d−1) (t0) .
Insa x si x sunt solutii ale ecuatiei diferentiale omogene si verifica aceleasiconditii initiale ın t0. Deci, via Teorema de existenta si unicitate, rezulta cax si x coincid pe [a, b] .
Concluzia este ca (11) si (13) reprezinta acelasi element x = x ∈ Ker L si,deoarece {x1, x2, ..., xd} este baza ın Ker L, vom avea C1 = C1, C2 = C2, ...,Cd = Cd.

6
Am demonstrat astfel ca sistemul algebric (12) are o solutie unica; decideterminantul acestui sistem, care este tocmai W [x1, x2, ..., xd] (t0) , estediferit de zero. Q.E.D.
4. Proprietati ale sistemelor fundamentale
1) Exista o infinitate de sisteme fundamentale de solutii.
Intr-adevar, nu avem decat sa consideram o matrice A = (aij)i,j∈1,d con-
stanta si nesingulara. Fie xi = xi (t) solutia unica a ecuatiei (1) care satisfaceconditia initiala
xi (t0) = ai1, x′i (t0) = ai2, ..., x(d−1)i (t0) = aid,
t0 fiind un punct arbitrar din [a, b] . Atunci sistemul de solutii {x1, x2, ...,xd} este liniar independent, deoarece ın t0 avem
W [x1, x2, ..., xd] (t0) = detA = 0.
Cum exista o infinitate de matrici constante si nesingulare A ∈ Md (R) sio infinitate de posibilitati de alegere a punctului t0 ∈ [a, b], rezulta ca existao infinitate de sisteme fundamenatale de solutii.
Q.E.D.2) Un sistem fundamental de solutii determina ın mod unic o ecuatie
liniara de ordin superior de tipul (1).
Intr-adevar, daca presupunem ca ar exista doua ecuatii de tipul (1),
x(d) + a1 (t)x(d−1) + a2 (t)x
(d−2) + ...+ ad (t)x = 0,
x(d) + b1 (t)x(d−1) + b2 (t)x
(d−2) + ...+ bd (t)x = 0,
avand un sistem fundamental de solutii comun, atunci el va satisface siecuatia obtinuta prin scaderea celor doua ecuatii membru cu membru:
(a1 (t)− b1 (t))x(d−1) + (a2 (t)− b2 (t))x
(d−2) + ...+ (ad (t)− bd (t))x = 0.
Daca a1 ≡ b1, atunci exista t0 ∈ [a, b] astfel ıncat
a1 (t0) = b1 (t0)
si, cum a1, b1 sunt continue pe [a, b], rezulta ca pe o vecinatate V a lui t0vor fi diferite:
a1 (t) = b1 (t) , ∀t ∈ V.
In aceasta vecinatate, ımpartind cu a1 (t)−b1 (t) ecuatia precedenta rezulta
x(d−1) +a2 (t)− b2 (t)
a1 (t)− b1 (t)x(d−2) + ...+
ad (t)− bd (t)
a1 (t)− b1 (t)x = 0, ∀t ∈ V.
Aceasta ecuatie este de ordinul d − 1 avand un sistem fundamental de dsolutii, ceea ce este absurd, deoarece spatiul solutiilor acestei ecuatii rezul-tate este d − 1 dimensional. Contradictia obtinuta ne arata ca a1 ≡ b1 si,repetand rationamentul anterior, rezulta ca toti coeficientii corespunzatoriai celor doua ecuatii sunt egali. Q.E.D.

7
3) Daca {x1, x2, ..., xd} este un sistem fundamental de solutii pentruecuatia (1), atunci solutia generala a ecuatiei (1) este
x (t) = C1x1 (t) + C2x2 (t) + ...+ Cdxd (t) , t ∈ [a, b] .
Intr-adevar, din liniaritatea operatorului L, rezulta ca
L
[d∑
i=1
Cixi
]=
d∑i=1
CiL [xi] = 0,
deci∑d
i=1Cixi este solutie a ecuatiei (1) .
In plus, fie t0 ∈ [a, b] si x00, x01,..., x
0d−1 ∈ R. Atunci problema Cauchy
(1) + (5) are solutie unica. Intr-adevar, avem∑d
i=1Cixi (t0) = x0∑di=1Cix
′i (t0) = x1
..............................∑di=1Cix
(d−1)i (t0) = xd−1
,
sistem compatibil determinat ın C1, C2, ..., Cd , deoarece determinantul saueste chiar W [x1, x2, ..., xd] (t0) , care este diferit de 0, {x1, x2, ..., xd} fiindsistem fundamental de solutii.
Q.E.D.4) Daca se considera un sistem de fundamental de solutii {x1, x2, ..., xd},
atunci ecuatia liniara care le admite ca sistem fundamental de solutii va fideterminata de egalitatea
W [x, x1, x2, ..., xd] = 0. (15)
Intr-adevar, ecuatia (15) este chiar de tipul (1), deoarece, daca vom dez-volta deteminantul
W [x, x1, x2, ..., xd] =
∣∣∣∣∣∣∣∣x (t) x1 (t) ... xd (t)x (t) x′1 (t) ... x′d (t)... ... ... ...
x(d) (t) x(d)1 (t) ... x
(d)d (t)
∣∣∣∣∣∣∣∣dupa prima coloana, coeficientul lui x(d) este tocmai W [x1, x2, ..., xd] , care
este nenul pe [a, b] . Impartind cu el ın ecuatia rezultata, coeficientul lui x(d)
va fi 1. Q.E.D.
5. Micsorarea ordinului unei ecuatii liniare
Consideram din nou ecuatia (1) ,
x(d) + a1 (t)x(d−1) + a2 (t)u
(d−2) + ...+ ad (t)x = 0
si presupunem ca se cunoaste un sistem de solutii {x1, ..., xp} liniar inde-pendent pe intervalul J, 1 ≤ p < d. Prin urmare, cel putin una dintre acestefunctii este neidentic nula pe intervalul J . Fara a micsora generalitatea,putem presupune ca x1 = 0 pe J.

8
Efectuam schimbarea (dubla) de variabila
x = zx1, z′ = u.
Atunci ecuatia (1) devine o ecuatie de ordinul d−1 cu functia necunoscutau :
u(d−1) + b1 (t)u(d−2) + ...+ bd−1 (t)u = 0.
Aceasta ecuatie admite drept solutii functiile
u1 =
(x2x1
)′, u2 =
(x3x1
)′, ..., up−1 =
(xpx1
)′.
Mai mult, sistemul de functii {u1, ..., up−1} este chiar liniar independent,deoarece, ın caz contrar, ar ınsemna ca exista C2, ..., Cp constante nu toatenule, astfel ıncat
C2
(x2x1
)′(t) + ...+ Cp
(xpx1
)′(t) = 0, ∀t ∈ J.
Prin integrare ın raport cu t ∈ J , rezulta
C2x2x1
+ ...+ Cpxpx1
= −C1, C1 ∈ R, ∀t ∈ J
sau
C1x1 + C2x2 + ...+ Cpxp = 0, ∀t ∈ J,
unde C1, C2, ..., Cp nu sunt toate nule. Acest lucru este ın contradictie cufaptul ca sistemul {x1, ..., xp} este liniar independent.
Procedeul se repeta si coboram ordinul cu p unitati, rezultand astfel oecuatie de ordinul d− p.
6. Ecuatia liniara neomogena
Dupa cum am observat, solutia generala a ecuatiei liniare neomogene (2)sau (4) este suma dintre solutia generala a ecuatiei omogene si o solutieparticulara a ecuatiei neomogene.
Rezulta ca problema determinarii solutiei generale a ecuatiei neomogenese reduce la gasirea unei solutii particulare a acesteia, pe care o vom deter-mina folosind metoda variatiei constantelor (sau metoda lui Lagrange).
Fie asadar
x0 (t) = C1x1 (t) + C2x2 (t) + ...+ Cdxd (t) ,
solutia generala a ecuatiei omogene, {x1, x2, ..., xd} formand un sistem fun-damental de solutii pentru ecuatia (1).
Metoda variatiei constantelor consta ın gasirea unei solutii particulare xpde forma lui x0, ın care C1, C2, ..., Cd sunt functii de t. Scopul nostru estede a afla aceste functii astfel ıncat
xp (t) = C1 (t)x1 (t) + C2 (t)x2 (t) + ..+ Cd (t)xd (t) =d∑
i=1
Ci (t)xi (t)(16)

9
sa fie o solutie a ecuatiei neomogene. Avantajul este ca noi avem d functii dedeterminat si doar o singura relatie, i.e. (2) . Rezulta ca putem sa impunemınca d− 1 conditii absolut arbitrare, pe care sa le atasam conditiei (2).
Calculand derivata de ordinul ıntai , obtinem
x′p =
d∑i=1
C ′ixi +
d∑i=1
Cix′i.
Putem pune prima conditie, ın scopul simplificarii expresiei lui x′p,
d∑i=1
C ′ixi = 0.
Astfel, derivata de ordinul ıntai devine
x′p =
d∑i=1
Cix′i.
Calculand derivata de ordinul doi obtinem
x′′p =
d∑i=1
C ′ix
′i +
d∑i=1
Cix′′i
si a doua conditie din cele d− 2 ramase va fi
d∑i=1
C ′ix
′i = 0.
Rezulta ca derivata de ordinul doi devine
x′′p =
d∑i=1
Cix′′i .
Repetand acest algoritm, ajungem la urmatoarele d− 1 conditii∑d
i=1C′ixi = 0∑d
i=1C′ix
′i = 0
......................∑di=1C
′ix
(d−2)i = 0
, (17)
iar derivatele functiei xp vor fi date de egalitatilex′p =
∑di=1Cix
′i
x′′p =∑d
i=1Cix′′i
.........................
x(d−1)p =
∑di=1Cix
(d)i +
∑di=1C
′ix
(d−1)i
.

10
Folosim din nou liniaritatea operatorului L si cum L [xi] = 0, ∀i ∈ 1, d,obtinem relatia
d∑i=1
Cix(d−1)i = h. (18)
Sistemul
∑di=1C
′ixi = 0∑d
i=1C′ix
′i = 0
......................∑di=1C
′ix
(d−2)i = 0∑d
i=1C′ix
(d−1)i = h
(19)
al celor d−1 relatii este un sistem algebric, liniar neomogen, ın care necunos-cutele sunt C ′
1, C′2, ..., C
′d; determinantul acestui sistem este nenul, deoarece
este chiar W [x1, x2, ..., xd] . Cum {x1, x2, ..., xd} formeaza un sistem fun-damental de solutii, wronskianul lui este nenul si deci (5.4.4) este compatibildeterminat. Presupunem ca aceasta solutie unica este
C ′1 = f1 (t) , C ′
2 = f2 (t) , ..., C ′d = fd (t) . (20)
Relatiile (20) ne permit sa gasim mai multe functii C1, C2, ..., Cd; ınsanoua nu ne trebuie decat cate o functie C1, C2, ..., respectiv Cd. Deci,este normal sa consideram drept C1, C2, ..., respectiv Cd cate o primitivaarbitrara a functiilor f1, f2, ..., fd. Inlocuindu-le ın (16), obtinem o solutieparticulara a ecuatiei liniare neomogene.
Solutia generala a ecuatiei liniare omogene va fi
x (t) = x0 (t) + xp (t) , ∀t ∈ J.
7. Ecuatii liniare cu coeficienti constanti
Sa consideram cazul cand a1, a2, ..., ad sunt constante. Evident, putemreduce studiul acestui caz, via ecuatiile (6), (7) , la cazul deja rezolvat alecuatiilor liniare de ordinul ıntai, avand coeficienti constanti. Din cele stu-diate ın Sectiunea 5.4, este suficient sa ne ocupam de ecuatia omogena,deoarece daca vom cunoaste un sistem fundamental de solutii al acesteia,putem determina solutia generala a ecuatiei neomogene.
Sa consideram astfel ecuatia
x(d) + a1x(d−1) + a2x
(d−2) + ...+ ad−1x′ + adx = 0 (21)
sau
Lx = 0,
unde a1, a2, ..., ad ∈ R. Sa definim polinomul
P (λ) := λd + a1λd−1 + a2λ
d−2 + ...+ ad−1λ+ ad. (22)

11
Ecuatia (21) poate fi scrisa ca o ecuatie de tipul (6), care va fi o ecuatie cucoeficienti constanti. Dupa cum s-a observat, ecuatia (6) are drept compo-
nente ale solutiei functii continand exponentiale. In consecinta, este firescsa cautam si pentru ecuatia (21) solutii de forma
x (t) = eλt. (23)
Inlocuind x (t) cu eλt ın ecuatia (21), gasim ecuatia echivalenta
eλt · P (λ) = 0.
Deci, (L[eλt]= 0)⇐⇒ (P (λ) = 0)
sau, cu alte cuvinte, eλt este solutie pentru ecuatia (21) daca si numai daca λeste radacina a polinomului caracteristic P (λ) (λ poarta ın acest caz numelede valoare proprie).
Cazul I. Daca ecuatia caracteristica
P (λ) = 0 (24)
are d solutii reale, distincte, fie ele λ1, λ2, ..., λd, atunci sistemul de functii{eλ1t, eλ2t, ..., eλdt
}este un sistem fundamental de solutii, deoa- rece, cal-
culand ın t = 0 wronskianul
W[eλ1t, eλ2t, ..., eλdt
](0) =
∣∣∣∣∣∣∣∣1 1 ... 1λ1 λ2 ... λd
... ... ... ...
λd−11 λd−1
2 ... λd−1d
∣∣∣∣∣∣∣∣ ,obtinem o cantitate diferita de zero, λ1, λ2, ..., λd fiind numere reale dis-tincte.
Observatie 2. Daca λ = α+ βi este o valoare proprie complexa simpla,atunci si λ = α−βi este o valoare proprie complexa simpla. Analog cazului
ecuatiei (vectoriale) (6), ınlocuim functiile complexe eλt si eλt cu urmatoareledoua functii reale
eλt + eλt
2= eαt cosβt
si
eλt − eλt
2i= eαt sinβt.
Cazul II. Daca ecuatia caracteristica (24) are si solutii numere realemultiple, atunci remarcam faptul ca operatorul diferential L are urmatoarea

12
proprietate
L[tkeλt
]=
∂d
∂td
(∂k
∂λkeλt)+ a1
∂d−1
∂td−1
(∂k
∂λkeλt)+ ...+
+ad−1∂
∂t
(∂k
∂λkeλt)+ ad
(∂k
∂λkeλt).
Cum eλt are derivate partiale continue de orice ordin, rezulta, conformTeoremei lui Schwarz de schimbare a ordinii de derivare,
L[tkeλt
]=
∂k
∂λk
(∂d
∂tdeλt)+ a1
∂k
∂λk
(∂d−1
∂td−1eλt)+ ...+
+ad−1∂k
∂λk
(∂
∂teλt)+ ad
∂k
∂λkeλt
=∂k
∂λk
(L[eλt])
=∂k
∂λk
(eλtP (λ)
)=
= eλtk∑
j=0
cjP(j) (λ) . (25)
Avem astfel echivalenta(L[tkeλt
]= 0)⇐⇒
k∑j=0
cjP(j) (λ) = 0
. (26)
Daca µ este ordinul de multiplicitate al valorii proprii λ, atunci, evident,
P (λ) = P ′ (λ) = ... = P (µ−1) (λ) = 0, P (µ) (λ) = 0. (27)
Sa luam asadar ın (5.5.5) pe k ∈ 0, p− 1. Conform relatiilor (26) rezultaca avem
L[tkeλt
]= 0, ∀ k ∈ 0, µ− 1. (28)
Concluzia este ca daca ecuatia caracteristica admite ca radacini λ1, λ2, ...,λh cu ordinele de multiplicitate µ1, µ2, ..., respectiv µh (µ1+µ2+...+µh = d),atunci obtinem d solutii ale ecuatiei (21),
eλ1t, teλ1t, ..., tµ1−1eλ1t, eλ2t, teλ2t, ..., tµ2−1eλ2t, ..., (29)
eλht, teλht, ..., tµh−1eλht.
De remarcat este ca sistemul (29) este un sistem fundamental de solutiipentru ecuatia (21), deoarece calculand wronskianul acestor solutii ın t = 0,obtinem un determinant nenul.
Observatie 3. Daca λ = α + βi este o radacina complexa multipla deordin µ, atunci si λ = α−βi este o radacina complexa multipla tot de ordinµ. Analog cazului ecuatiei (vectoriale) (6), ınlocuim cele 2µ functii complexecare corespund acestor valori proprii
eλt, teλt, ..., tµ−1eλt, eλt, teλt, ..., tµ−1eλt,

13
cu urmatoarele 2µ functii reale
eαt cosβt, eαt sinβt, teαt cosβt, teαt sinβt, ...,
tµ−1eαt cosβt, tµ−1eαt sinβt.
Exemple.1. Sa se determine solutia generala a ecuatiei liniare cu coeficienti constanti
x′′ − 3x′ + 2x = 0.
Solutie.Avem de rezolvat o ecuatie liniara omogena cu coeficienti constanti, de
ordinul al doilea. Ecuatia caracteristica este
λ2 − 3λ+ 2 = 0,
care are radacinile reale si distincte λ1 = 1, λ2 = 2.Un sistem fundamental de solutii pentru ecuatia data va fi{
et, e2t}
si astfel, solutia generala este
x (t) = C1et + C2e
2t, C1, C2 ∈ R.
Daca dorim sa aflam si solutia problemei Cauchy{x′′ − 3x′ + 2x = 0x (0) = 0, x′ (0) = 1
,
obtinem pentru C1, C2 sistemul algebric{C1 + C2 = 0C1 + 2C2 = 1
,
a carui solutie este C1 = −1, C2 = 1. Deci, solutia problemei Cauchy estex (t) = −et + e2t.
In schimb, problema Cauchy{x′′ − 3x′ + 2x = 0x (0) = 0, x′ (0) = 0
are unica solutie pe cea banala, via Teorema de existenta si unicitate.2. Sa se determine solutia generala a ecuatiei liniare cu coeficienti constanti
x′′ − 3x′ + 2x = 1.
Solutie.Avem de rezolvat o ecuatie liniara neomogena cu coeficienti constanti, de
ordinul al doilea. Solutia sa generala este
x (t) = x0 (t) + xp (t) ,
unde
x0 (t) = C1et + C2e
2t, C1, C2 ∈ R

14
este solutia generala a ecuatiei omogene deja aflate la exemplul 1. si xpeste o solutie particulara a ecuatiei neomogene, pe care o cautam folosindmetoda variatiei constantelor, de forma lui x0,
xp (t) = C1 (t) et + C2 (t) e
2t.
Din conditia ca xp sa satisfaca ecuatia neomogena, rezulta sistemul (19) ,care se scrie {
C ′1 (t) e
t + C ′2(t) e2t = 0
C ′1 (t) e
t + 2C ′2 (t) e
2t = 1,
a carui solutie este
C ′1 (t) = −e−t, C ′
2 (t) = e−2t.
Determinand cate o primitiva a lui −e−t si e−2t, gasim
C1 (t) = e−t, C2 (t) = −e−2t
2.
Deci, o solutie particulara pentru ecuatia neomogena este
xp (t) =1
2
si asftel, solutia generala a ecuatiei date este
x (t) = C1et + C2e
2t +1
2, C1, C2 ∈ R.
Daca mai cerem sa se afle si solutia problemei Cauchy{x′′ − 3x′ + 2x = 1x (0) = 0, x′ (0) = 1
,
obtinem pentru C1, C2 sistemul algebric{C1 + C2 = −1
2C1 + 2C2 = 1
,
a carui solutie este C1 = −2, C2 = 32 . Deci, solutia problemei Cauchy este
x (t) = −2et + 32e
2t + 12 .
3. Sa se determine solutia generala a ecuatiei liniare cu coeficienti constanti
x(4) + x′′ = 0.
Solutie.Avem de rezolvat o ecuatie liniara omogena cu coeficienti constanti, de
ordinul al patrulea. Ecuatia caracteristica este
λ4 + λ2 = 0,
care are radacinile λ1 = λ2 = 0, λ3 = i, λ4 = −i.Un sistem fundamental de solutii pentru ecuatia data va fi
{1, t, cos t, sin t}

15
si astfel solutia generala este
x (t) = C1 + C2t+ C3 cos t+ C4 sin t, C1, C2, C3, C4 ∈ R.4. Sa se determine solutia generala a ecuatiei liniare cu coeficienti constanti
x(4) + x′′ = 7t.
Solutie.Avem de rezolvat o ecuatie liniara neomogena cu coeficienti constanti, de
ordinul al patrulea. Solutia sa generala este
x (t) = x0 (t) + xp (t) ,
unde
x0 (t) = C1 + C2t+ C3 cos t+ C4 sin t, C1, C2, C3, C4 ∈ Reste solutia generala a ecuatiei omogene deja aflate la exemplul 3. si xpeste o solutie particulara a ecuatiei neomogene, pe care o cautam folosindmetoda variatiei constantelor, de forma lui x0,
xp (t) = C1 (t) + C2 (t) t+ C3 (t) cos t+ C4 (t) sin t.
Din conditia ca xp sa satisfaca ecuatia neomogena, rezulta sistemul (19) ,care se scrie
C ′1 (t) + C ′
2(t) t+ C ′
3 (t) cos t+ C ′4 (t) sin t = 0
C ′2(t)− C ′
3 (t) sin t+ C ′4 (t) cos t = 0
−C ′3 (t) cos t− C ′
4 (t) sin t = 0C ′3 (t) sin t− C ′
4 (t) cos t = 7t
,
a carui solutie este
C ′1 (t) = −7t2, C ′
2 (t) = 7t, C ′3 (t) = 7t sin t, C ′
4 (t) = −7t cos t.
Determinand cate o primitiva a lui −7t2 si 7t, 7t sin t, −7t cos t, gasim
C1 (t) = −7
3t3, C2 (t) =
7
2t2,
C3 (t) = 7 sin t− 7t cos t, C4 (t) = −7 cos t− 7t sin t.
Deci, o solutie particulara pentru ecuatia neomogena este
xp (t) = −7
3t3 +
7
2t3 +
+(7 sin t− 7t cos t) cos t+ (−7 cos t− 7t sin t) sin t
=7
6t3 − 7t
si asftel, solutia generala a ecuatiei date este
x (t) = C1 + C2t+ C3 cos t+ C4 sin t+7
6t3 − 7t, C1, C2, C3, C4 ∈ R.
5. Sa se rezolve sistemul {x′1 = x1 − x2x′2 = x1
.

16
Solutie.Uneori, cum este cazul acestui exemplu, este mai usor sa reducem sistemul
la o ecuatie de ordin superior. Derivand prima ecuatie, avem
x′′1 = x′1 − x′2 = x′1 − x1,
de unde rezulta ecuatia de ordinul al doilea cu coeficienti constanti
x′′1 − x′1 + x1 = 0,
care are solutia generala
x1 (t) = C1et2 cos
t√3
2+ C2e
t2 sin
t√3
2, C1, C2 ∈ R.
Atunci, x2 se deduce din prima ecuatie a sistemului,
x2 (t) = x1 (t)− x′1 (t) =
=C1 + C2
√3
2e
t2 cos
t√3
2+
+C1
√3 + 3C2
2e
t2 sin
t√3
2,
C1, C2 ∈ R.6. Sa se rezolve sistemul{
x′1 = −x1 + x2x′2 = x1 − x2
.
Solutie.Prin adunare membru cu membru a celor doua ecuatii, gasim
(x1 + x2)′ = 0,
de unde
x2 = C1 − x1, C1 ∈ R.
Inlocuind ın prima ecuatie a sistemului, rezulta ecuatia liniara neomogenade ordinul ıntai
x′1 = −2x1 + C1,
de unde rezulta
x1 (t) =1
2C1 + e−2tC2, C1, C2 ∈ R
si
x2 (t) =1
2C1 − e−2tC2, C1, C2 ∈ R.
7. Sa se rezolve sistemul{x′1 = a1x1 + b1x2x′2 = a2x1 + b2x2
.
Solutie.

17
Pentru acest caz general, metoda de rezolvare este urmatoarea: ınmultim,de exemplu a doua ecuatie cu λ = 0, pe care ıl vom preciza ulterior si adunamecuatiile:
(x1 + λx2)′ = (a1 + λa2)
(x1 +
b1 + λb2a1 + λa2
x2
)si rezolvam ecuatia
λ =b1 + λb2a1 + λa2
,
care este o ecuatie de gradul al doilea ın λ; aceasta pentru ca ecuatiadiferentiala rezultata sa fie o ecuatie usor de integrat. Apoi determinamsolutia generala a ecuatiei cu variabile separabile
(x1 + λx2)′ = (a1 + λa2) (x1 + λx2) .
De exemplu, daca la sistemul
{x′1 = 2x1 + x2x′2 = 3x1 + 4x2
ınmultim a doua ecuatie cu λ = 0, pe care ıl vom preciza ulterior, obtinem,prin adunarea ecuatiilor,
(x1 + λx2)′ = (3λ+ 2)
(x1 +
4λ+ 1
3λ+ 2x2
).
Rezolvam ecuatia
λ =4λ+ 1
3λ+ 2,
si gasim solutiile reale λ1 = 1, λ2 = −13 . Daca λ = 1, atunci
(x1 + x2)′ = 5 (x1 + x2) ,
de unde
x1 + x2 = C1e5t, C1 ∈ R;
daca λ = −13 , atunci (
x1 −x23
)′= x1 −
x23,
de unde
x1 −x23
= C2et, C2 ∈ R.
Solutia se determina acum imediat din sistemul algebric{x1 + x2 = C1e
5t
x1 − x23 = C2e
t , C1, C2 ∈ R,

18
rezultand {x1 =
C14 e5t + 3C2
4 et
x2 =3C14 e5t − 3C2
4 et, C1, C2 ∈ R.
8. Se considera ecuatia diferentiala liniara cu coeficienti constanti deordinul al doilea
x′′ + ax′ + bx = 0,
unde a, b ∈ R. Sa se determine a, b, astfel ıncat toate solutiile acestei ecuatiisa fie periodice.
Solutie. Ecuatia caracteristica este
λ2 + aλ+ b = 0,
de unde rezulta
λ1,2 =−a±
√a2 − 4b
2.
Cum un sistem fundamental de solutii pote fi{e
−a−√
a2−4b2
t, e−a+
√a2−4b2
t
}, daca a2 − 4b > 0 sau{
e−a2t, te
−a2t}, daca a2 − 4b = 0 sau{
e−a2t cos
(t√4b− a2
), e
−a2t sin
(t√4b− a2
)}, daca a2 − 4b < 0,
pentru ca ecuatia sa admita numai solutii periodice, este necesar ca a2−4b <0, adica solutia generala sa se scrie sub forma
x (t) = C1e−a2t cos
(√4b− a2t
)+ C2e
−a2t sin
(√4b− a2t
),
C1, C2 ∈ R si din nou, din periodicitate, rezulta −a2 = 0. Deci, a = 0 si
4b > a2.
8. Ecuatii de tip Euler
Ecuatiile de tip Euler sunt de forma
a0tdx(d) + a1t
d−1x(d−1) + ...+ ad−1tx′ + adx = 0, t > 0 (30)
care se numesc ecuatii Euler omogene sau de forma
a0tdx(d) + a1t
d−1x(d−1) + ...+ ad−1tx′ + adx = f (t) , t > 0 (31)
care se numesc ecuatii Euler neomogene. Acelasi tip de ecuatii se poateconsidera pentru t < 0.
Aceste ecuatii ((30) si (31)) se pot reduce la ecuatii cu coeficienti constantiprintr-o schimbare adecvata de variabila independenta.
Notam t = eu sau u = ln t. (In cazul ın care ecuatia este consideratapentru t < 0, care schimbarea de variabila este t = −eu.)
Astfel u devine noua variabila independenta. Notam

19
x (t) = x (eu) =: x (u) .
Vom determina succesiv derivatele dxdt ,
d2xdt2
, d3xdt3
, ... .Avem, folosind regula de derivare a functiilor compuse,
x′ (t) =dx
dt=
dx
du· dudt
= x′ (u) · 1t= x′ (u) e−u; (32)
x′′ (t) =d2x
dt2=
d
dt
(dx
dt
)=
d
dt
(x′ (u) e−u
)= (33)
=d
du
(x′ (u) e−u
)· dudt
=(x′′ (u) e−u − x′ (u) e−u
)· 1t=
=(x′′ (u) e−u − x′ (u) e−u
)e−u =
(x′′ (u)− x′ (u)
)e−2u;
x′′′ (t) =d3x
dt3=
d
dt
(d2x
dt2
)=
d
dt
((x′′ (u)− x′ (u)
)e−2u
)=
=d
du
((x′′ (u)− x′ (u)
)e−2u
)· dudt
= (34)
=((x′′′ (u)− x′′ (u)− 2x′′ (u) + 2x′ (u)
)e−2u
)· 1t=
=((x′′′ (u)− 3x′′ (u) + 2x′ (u)
)e−2u
)e−u =
=(x′′′ (u)− 3x′′ (u) + 2x′ (u)
)e−3u; etc.
Dupa determinarea acestor derivate ale functiei necunoscute ın raportcu noua variabila independenta, u, introducem ın ecuatia (30) (sau (31))aceste expresii si obtinem o ecuatie cu coeficienti constanti, deoarece lafiecare termen ad−kt
kx(t), k ∈ 0, d, functia eku se va simplifica.Observatie 4. Tinand cont de formulele (32) , (33) , (34) etc., putem
scrie direct ecuatia caracteristica pentru ecuatia cu coeficienti constanti lacare se va ajunge, dupa schimbarea de variabila t = eu si anume
a0λ (λ− 1) ... (λ− d+ 1) + a1λ (λ− 1) ... (λ− d+ 2)++...+ ad−1λ+ ad = 0.
(35)
Exemple.1. Sa se rezolve ecuatia Euler neomogena
t2x′′ − tx′ + x = 8t3, t > 0.
Solutie.Cu schimbarea de variabila t = eu si tinand cont de formulele (32) si (33) ,
gasim
e2u(x′′ (u)− x′ (u)
)e−2u − eu
(x′ (u)
)e−u + x (u) = 8e3u

20
sau
x′′ (u)− 2x′ (u) + x (u) = 8e3u,
care este o ecuatie liniara de ordinul al treilea cu coeficienti constanti, neo-mogena.
Pentru rezolvarea ecuatiei omogene, scriem ecuatia caracteristica,
λ2 − 2λ+ 1 = 0,
care are solutiile λ1 = λ2 = 1. Astfel, un sistem fundamental de solutii este{eu, ueu} si solutia generala a ecuatiei omogene este
x0 (u) = C1eu + C2ue
u, C1, C2 ∈ R
sau, revenind la variabila t,
x0 (t) = C1t+ C2t ln t, C1, C2 ∈ R.
Determinam acum o solutie particulara pentru ecuatia neomogena, lucrandfie ın variabila t, fie ın variabila u. De exemplu, considerand u variabila delucru, o functie C1 (u) si o functie C2 (u) se afla din sistemul{
C ′1 (u) e
u + C ′2 (u)ue
u = 0C ′1 (u) e
u + C ′2 (u) (u+ 1) eu = 8e3u
.
Rezulta, prin scadere membru cu membru a celor doua ecuatii,
C ′2 (u) = 8e2u
si deci
C ′1 (u) = −8ue2u.
Astfel,
C1 (u) = −∫
8ue2udu = −4ue2u + 2e2u,
C2 (u) =
∫8e2udu = 4e2u.
O solutie particulara a ecuatiei neomogene va fi
xp (u) =(−4ue2u + 2e2u
)eu + 4e2uueu = 2e3u
si solutia generala
x (u) = x0 (u) + xp (u) =
= C1eu + C2ue
u + 2e3u, C1, C2 ∈ R
sau
x (t) = C1t+ C2t ln t+ 2t3, C1, C2 ∈ R.
2. Sa se rezolve ecuatia Euler omogena
t3x′′′ + tx′ − x = 0.
Solutie.

21
Folosind schimbarea de variabila t = eu, formula (35) devine
λ (λ− 1) (λ− 2) + λ− 1 = 0,
de unde
λ1 = λ2 = λ3 = 1
si astfel un sistem fundamental de solutii pentru ecuatia cu coeficienti constantiın u se determina imediat:
{eu, ueu, u2eu
}. Solutia generala a ecuatiei date
este
x (u) = C1eu + C2ue
u + C3u2eu, C1, C2, C3 ∈ R
sau, revenind la variabila t,
x0 (t) = C1t+ C2t ln t+ C3t ln2 t, C1, C2, C3 ∈ R.
3. Sa se rezolve ecuatia Euler neomogena
(t− 2)2 x′′ − 3 (t− 2)x′ + 4x = t, t > 2.
Solutie.Cu schimbarea de variabila t− 2 = eu si tinand cont de formulele (32) si
(33) (care nu se modifica ın cadrul acestei schimbari de variabila), gasim
e2u(x′′ (u)− x′ (u)
)e−2u − 3eu
(x′ (u)
)e−u + 4x (u) = eu + 2
sau
x′′ (u)− 4x′ (u) + 4x (u) = eu + 2,
care este o ecuatie liniara de ordinul al doilea cu coeficienti constanti, neo-mogena.
Pentru rezolvarea ecuatiei omogene, scriem ecuatia caracteristica,
λ2 − 4λ+ 4 = 0,
care are solutiile λ1 = λ2 = 2. Astfel, un sistem fundamental de solutii este{e2u, ue2u
}si solutia generala a ecuatiei omogene este
x0 (u) = C1e2u + C2ue
2u, C1, C2 ∈ R
sau, revenind la variabila t,
x0 (t) = C1 (t− 2)2 + C2 (t− 2)2 ln (t− 2) , C1, C2 ∈ R.
Determinam acum o solutie particulara pentru ecuatia neomogena, lucrandfie ın variabila t, fie ın variabila u. De exemplu, considerand u variabila delucru, o functie C1 (u) si o functie C2 (u) se afla din sistemul{
C ′1 (u) e
2u + C ′2 (u)ue
2u = 02C ′
1 (u) e2u + C ′
2 (u) (2u+ 1) e2u = eu + 2.
Rezulta, prin scadere membru cu membru a celor doua ecuatii,
C ′2 (u) = e−u + 2e−2u

22
si deci
C ′1 (u) = −ue−u − 2ue−2u.
Astfel,
C1 (u) =
∫ (−ue−u − 2ue−2u
)du = ue−u + e−u + ue−2u +
1
2e−2u,
C2 (u) =
∫ (e−u + 2e−2u
)du = −e−u − e−2u.
O solutie particulara a ecuatiei neomogene va fi
xp (u) =
(ue−u + e−u + ue−2u +
1
2e−2u
)e2u +
(−e−u − e−2u
)ue2u =
= eu +1
2.
si solutia generala
x (u) = x0 (u) + xp (u) =
= C1e2u + C2ue
2u + eu +1
2, C1, C2 ∈ R
sau
x (t) = C1 (t− 2)2 + C2 (t− 2)2 ln (t− 2) + t− 3
2, C1, C2 ∈ R.

Ecuatii diferentiale ordinareTema 6 - Ecuatii liniare de ordin superior
(1) Sa se rezolve urmatoarele ecuatii liniare de ordin superior, cu coeficienticonstanti:(a) x′′ + x′ − 2x = 0;(b) x′′ + 4x′ + 3x = 0;(c) x′′ − 2x′ = 0;(d) 2x′′ − 5x′ + 2x = 0;(e) x′′ − 4x′ + 5x = 0;(f) x′′ + 2x′ + 10x = 0;(g) x′′ + 4x = 0;
(h) x(4) − x = 0;
(i) x(6) + 64x = 0;(j) x′′ − 2x′ − 3x = e4t;(k) x′′ + x = 4tet;(l) x′′ − 3x′ + 2x = sin t;
(m) x′′ + x = 4 sin t;(n) x′′ − 5x′ + 4x = 4t2e2t;(o) x′′ − 3x′ + 2x = t cos t;(p) x′′ + 2x′ − 3x = t2et;(q) x′′ − 9x = e3t cos t;(r) x′′ − 2x′ + x = 6tet;(s) x′′ + x = t sin t;
(t) x′′ − 2x′ + x = et
t ;(u) x′′′ − x′′ − x′ + x = et.
(2) Determinati ecuatia liniara cu coeficienti constanti, de ordin minim,care are printre functiile unui sistem fundamental de solutii urma-toarele functii:(a) t2et;(b) t sin t;(c) tet, e−t;(d) e2t cos t;(e) tet cos 2t;(f) t, sin t.
(3) Verificati daca sistemele urmatoare de functii sunt sau nu liniar in-dependente si, ın caz afirmativ, scrieti ecuatia liniara ce le admiteca sisteme fundamentale de solutii:(a) t+ 2, t− 2;(b) 6t+ 9, 8t+ 12;(c) sin t, cos t;(d) 1, t, t2;(e) 1, sin2 t, cos 2t;(f) 2t, 3t, 6t;(g) 1, arctg t, arcctg t;
1

2
(h) t2, t |t| .(4) Sa se rezolve urmatoarele ecuatii de tip Euler:
(a) t2x′′ − 4tx′ + 6x = 0, t > 0;(b) t2x′′ − tx′ − 3x = 0, t > 0;(c) t2x′′′ = 2x′, t > 0;(d) t2x′′ + tx′ + 4x = 10t, t > 0;(e) t3x′′ − 2tx = 6 ln t, t > 0;(f) t2x′′ − 3tx′ + 5x = 3t2, t > 0;(g) t2x′′ − 6x = 5t3 + 8t2, t > 0;(h) t2x′′ − 2x = sin ln t, t > 0.
Solutii.
(1) (a) x (t) = C1et + C2e
−2t, C1, C2 ∈ R;(b) x (t) = C1e
−t + C2e−3t, C1, C2 ∈ R;
(c) x (t) = C1 + C2e2t, C1, C2 ∈ R;
(d) x (t) = C1e2t + C2e
t2 , C1, C2 ∈ R;
(e) x (t) = C1e2t cos t+ C2e
2t sin t, C1, C2 ∈ R;(f) x (t) = C1e
−t cos 3t+ C2e−t sin 3t, C1, C2 ∈ R;
(g) x (t) = C1 cos 2t+ C2 sin 2t, C1, C2 ∈ R;(h) x (t) = C1e
t + C2e−t + C3 cos t+ C4 sin t, C1, C2, C3, C4 ∈ R;
(i) x (t) = C1et√3 cos t+ C2e
t√3 sin t+ C3 cos 2t+ C4 sin 2t+
C5e−t
√3 cos t+ C6e
−t√3 sin t, C1, C2, C3, C4, C5, C6 ∈ R;
(j) x (t) = C1e−t + C2e
3t + 15e
4t, C1, C2 ∈ R;(k) x (t) = C1 cos t+ C2 sin t+ (2t− 2) et, C1, C2 ∈ R;(l) x (t) = C1e
t + C2e2t + 0, 1 sin t+ 0, 3 cos t, C1, C2 ∈ R;
(m) x (t) = C1 cos t+ C2 sin t− 2t cos t, C1, C2 ∈ R;(n) x (t) = C1e
t + C2e4t −
(2t2 − 2t+ 3
)e2t, C1, C2 ∈ R;
(o) x (t) = C1et + C2e
2t + (0, 1t− 0, 12) cos t − (0, 3t+ 0, 34) sin t,C1, C2 ∈ R;
(p) x (t) = C1et + C2e
−3t +(
t3
12 − t2
16 + t32
)et, C1, C2 ∈ R;
(q) x (t) = C1e3t + C2e
−3t + e3t(
637 sin t−
137 cos t
), C1, C2 ∈ R;
(r) x (t) = C1et + C2te
t + t3et, C1, C2 ∈ R;(s) x (t) = C1 cos t+ C2 sin t− t2
4 cos t+ t4 sin t, C1, C2 ∈ R;
(t) x (t) = C1et + C2te
t − tet + tet ln |t| , C1, C2 ∈ R;(u) x (t) = C1e
t+C2tet+C3e
−t+ t2e
t− t2+t4 tet+ et
8 , C1, C2, C3 ∈ R.(a) Daca t2et apartine unui sistem fundamental de solutii, atunci
ecuatia admite si solutiile et si tet, corespunzatoare, evident,valorii proprii reale si triple λ1 = λ2 = λ3 = 1. Deci polinomulcaracteristic de ordin minim va fi
P (λ) = (λ− λ1) (λ− λ2) (λ− λ3) = (λ− 1)3 =
= λ3 − 3λ2 + 3λ− 1,
iar ecuatia liniara cu coeficienti constanti, de ordin minim, trei,va fi x′′′ − 3x′′ + 3x′ − x = 0.

3
(b) Daca t sin t apartine unui sistem fundamental de solutii, atunciecuatia admite si solutiile t cos t, sin t, cos t, corespunzatoare,evident, valorilor proprii complexe conjugate si duble λ1 = λ2 =i, λ3 = λ4 = −i. Deci polinomul caracteristic de ordin minimva fi
P (λ) = (λ− λ1) (λ− λ2) (λ− λ3) (λ− λ4) =
= (λ− i)2 (λ+ i)2 =(λ2 + 1
)2=
= λ4 + 2λ2 + 1,
iar ecuatia liniara cu coeficienti constanti, de ordin minim, pa-tru, va fi x(4) + 2x′′ + x = 0.
(c) Daca tet apartine unui sistem fundamental de solutii, atunciecuatia admite si solutia et corespunzatoare, evident, valoriiproprii reale si duble λ1 = λ2 = 1; e−t este o functie din sistemulfundamental de solutii corespunzatoare valorii proprii reale sim-ple λ3 = −1. Deci polinomul caracteristic de ordin minim va fi
P (λ) = (λ− λ1) (λ− λ2) (λ− λ3) = (λ− 1)2 (λ+ 1) =
= λ3 − λ2 − λ+ 1,
iar ecuatia liniara cu coeficienti constanti, de ordin minim, trei,va fi x′′′ − x′′ − x′ + x = 0.
(d) Analog rezulta ecuatia x′′ − 4x′ + 5x = 0.
(e) Analog rezulta ecuatia x(4) − 4x′′′ + 14x′′ − 20x′ + 25x = 0.(f) Analog rezulta ecuatia
x(4) + x′′ = 0.
(2) Verificam daca wronskianul acestor sisteme de functii este diferit dezero. Daca va fi nenul, sistemul va fi liniar independent, iar ecuatiace admite aceste functii ca sistem fundamental de solutii va fi datade Proprietatea 4) a sistemelor fundamentale.
(a) W [t+ 2, t− 2] =
∣∣∣∣ t+ 2 t− 21 1
∣∣∣∣ = 4 = 0; sistemul {t+2, t−2}
este liniar independent si ecuatia este
W [x, t+ 2, t− 2] = 0,
adica ∣∣∣∣∣∣x t+ 2 t− 2x′ 1 1x′′ 0 0
∣∣∣∣∣∣ = 0
sau
x′′ = 0;

4
(b) W [6t+ 9, 8t+ 12] =
∣∣∣∣ 6t+ 9 8t+ 126 8
∣∣∣∣ = 0; nu putem afirma
ca sistemul {6t+ 9, 8t+ 12} este liniar independent. Insa, con-siderand C1, C2 astfel ıncat
C1 (6t+ 9) + C2 (8t+ 12) = 0,
rezulta sistemul{6C1 + 8C2 = 09C1 + 12C2 = 0
,
care este compatibil simplu nedeterminat; deci {6t+9, 8t+12}este liniar dependent;
(c) W [sin t, cos t] =
∣∣∣∣ sin t cos tcos t − sin t
∣∣∣∣ = −1 = 0; sistemul {sin t, cos t}
este liniar independent si ecuatia este
W [x, sin t, cos t] = 0,
adica ∣∣∣∣∣∣x sin t cos tx′ cos t − sin tx′′ − sin t − cos t
∣∣∣∣∣∣ = 0;
(d) W[1, t, t2
]=
∣∣∣∣∣∣1 t t2
0 1 2t0 0 2
∣∣∣∣∣∣ = 2 = 0; sistemul{1, t, t2
}este liniar
independent si ecuatia este
W[x, 1, t, t2
]= 0,
adica ∣∣∣∣∣∣∣∣x 1 t t2
x′ 0 1 2tx′′ 0 0 2x′′′ 0 0 0
∣∣∣∣∣∣∣∣ = 0
sau
x′′′ = 0;
(e) W[1, sin2 t, cos 2t
]= 0; sistemul
{1, sin2 t, cos 2t
}este liniar de-
pendent, deoarece 1− 2 sin2 t− cos 2t = 0;(f)
W[2t, 3t, 6t
]=
∣∣∣∣∣∣2t 3t 6t
2t ln 2 3t ln 3 6t ln 62t ln2 2 3t ln2 3 6t ln2 6
∣∣∣∣∣∣ == 36t ln
(3
2· 62· 63
)= 0;

5
sistemul{2t, 3t, 6t
}este liniar independent si ecuatia este
W[x, 2t, 3t, 6t
]= 0,
adica ∣∣∣∣∣∣∣∣x 2t 3t 6t
x′ 2t ln 2 3t ln 3 6t ln 6x′′ 2t ln2 2 3t ln2 3 6t ln2 6x′′′ 2t ln3 2 3t ln3 3 6t ln3 6
∣∣∣∣∣∣∣∣ = 0;
(g) W [1, arctg t, arcctg t] = 0; sistemul {1, arctg t, arcctg t} esteliniar dependent, deoarece π
2− arctg t− arcctg t = 0;
(h) W[t2, t |t|
]=
∣∣∣∣ t2 t |t|2t 2 |t|
∣∣∣∣ = 0; se arata foarte usor (considerand
t ≥ 0 si t ≤ 0) ca sistemul{t2, t |t|
}este liniar dependent.
(a) x (t) = C1t2 + C2t
3, C1, C2 ∈ R;(b) x (t) = C1t
3 + C2t , C1, C2 ∈ R;
(c) x (t) = C1 + C2 ln t+ C3t3, C1, C2, C3 ∈ R;
(d) x (t) = C1 cos (2 ln t) + C2 sin (2 ln t) + 2t, C1, C2 ∈ R;(e) x (t) = C1t
2 + C2t − 2
3ln tt − ln2 t
t , C1, C2 ∈ R;(f) x (t) = C1t
2 cos ln t+ C2t2 sin ln t++3t2, C1, C2 ∈ R;
(g) x (t) = C1t3 + C2
t2+ t3 ln t− 2t2, C1, C2 ∈ R;
(h) x (t) = C1t2 + C2
t + 0, 1 cos ln t− 0, 3 sin ln t, C1, C2 ∈ R.






























Tema 7
Serii Fourier
(1) Determinati seria Fourier asociata functiei f : [−π, π] → R,f (x) = 3− 2 sinx+ sin2 x− 2 cos2 x+ 6 cos3 x− 6 cosx.
(2) Determinati seria Fourier asociata functiei f [−π, π] → R,
f (x) =
{−1, daca x ∈ [−π, 0],2, daca x ∈ (0, π].
(3) Dezvoltati ın serie Fourier functia f : [−π, π] → R,f (x) = x2.
(4) Dezvoltati ın serie Fourier functia f : [−π, π] → R,f (x) = x.
(5) Dezvoltati ın serie de sinusi functia f : [0, π] → R,f (x) = x2.
(6) Dezvoltati ın serie de cosinusi functia f : [0, π] → R,f (x) = x.
1


































Transformata Laplace si Laplace discreta
Tema 8
(1) Determinati transformatele Laplace ale urmatoarelor originaleLaplace:(a) tet;
(b)∫ t
0u2e−udu;
(c)∫ t
0et−u sinudu;
(d) (t− 2)2 χ (t− 2) ;(e) (t− 2)2 χ (t) .
(2) Determinati originalele Laplace, ale caror transformate Laplacesunt functiile:(a) 1
z(z2+1);
(b) 1z2−2
;
(c) 1(z2+1)2
;
(d) z(z2−1)2
;
(e) 1(z2+α2)2
, α ∈ R;(f) 1
z2(z2+1)2.
(3) Sa se rezolve urmatoarele probleme Cauchy:
(a)
{x′ + 2x = sin t, t > 0x (0) = 0
;
(b)
x′′ − x′ − 2x = 0, t > 0x (0) = 1x′ (0) = 0
;
(c)
x′′ − 5x′ + 6x = et, t > 0x (0) = −1x′ (0) = 1
;
(d)
{x′′ + x = 0, t > 0x (0) = 1, x′ (0) = 0
;
(e)
{x′′ + 3x = et, t > 0x (0) = 0, x′ (0) = −1
;
(f)
x′′ + x = sin 2t, t > 0x (0) = 0x′ (0) = 1
;
(g)
{x′′′ + 2x′′ + 5x′ = 0, t > 0x (0) = −1, x′ (0) = 2, x′′ (0) = 0
;
(h)
{x′′′ + x′′ = cos t, t > 0x (0) = −2, x′ (0) = x′′ (0) = 0
.
1

2
(4) Sa se rezolve urmatoarele probleme Cauchy:
(a)
{x′ = x+ 2y,y′ = 2x+ y + 1
, t > 0; x (0) = 0, y (0) = 5;
(b)
{x′ = 2y,y′ = 2x
, t > 0; x (0) = 2, y (0) = 3;
(c) x′′ = 3 (y − x+ z) ,y′′ = x− yz′′ = −z
, t > 0,
x (0) = x′ (0) = 0, y (0) = 5, y′ (0) = 1, z (0) = 1, z′ (0) = 0.
(d) {x′′ + x′ + y′′ − y = et
x′ + 2x− y′ + y = e−t , t > 0,
x (0) = y (0) = 0, x′ (0) = 1, y′ (0) = 0.
(5) Sa se rezolve urmatoarele ecuatii integrale liniare (Volterra):
(a) x (t) = 2∫ t
0cos (t− s)x (s) ds+ sin t, t ∈ [0, a] , a > 0.
(b) x (t) = −∫ t
0et−sx (s) ds+ et, t ∈ [0, a] , a > 0.
(c) x (t) = −∫ t
0(t− s)x (s) ds+ t, t ∈ [0, a] , a > 0.
(d) x (t) =∫ t
0esx (t− s) ds+ 2− tet, t ∈ [0, a] , a > 0.
(6) Sa se determine termenul general al sirului xn, n ∈ N, definitrecursiv prin:(a) x0 = 0, x1 = 2, xn+2 = 4xn+1 − 4xn + 3n, ∀n ≥ 0;(b) x0 = 0, x1 = 1, xn+2 = xn+1 + xn, ∀n ≥ 0 (Fibonacci).
Solutii.
(1) (a) 1(z−1)2
;
(b) 2z(z+1)3
;
(c) 1(z−1)(z2+1)
;
(d) 2e−2z
z3;
(e) 2z3
− 4z2
+ 4z;
(a) 1− cos t;
(b)sh (
√2t)√2
;
(c) sin t−t cos t2
;
(d) t sh t2
;
(e) sinαt−αt cosαt2α3 ;
(f) t− 2 sin t+ t sin t2
.

3
(a) x (t) = 15(e−2t − cos t+ 2 sin t) ;
(b) x (t) = 13e2t + 2
3e−t;
(c) x (t) = 12et − 5e2t + 7
2e3t;
(d) x (t) = cos t;(e) x (t) = 1
4et + 5
12e−3t − 2
3;
(f) x (t) = 53sin t− 1
3sin 2t;
(g) x (t) = 35e−t sin 2t− 4
5e−t cos 2t− 1
5;
(h) x (t) = −1− 12(sin t+ cos t+ e−t) .
(i)
{x (t) = −2
3− 2e−t + 8
3e3t
y (t) = 13+ 2e−t + 8
3e3t
;
(j)
{x (t) = 5
2e2t − 1
2e−2t
y (t) = 52e2t − 1
2e−2t ;
(k)
x (t) = 34(1− t)− 3
4cos 2t+ 3
8sin 2t
y (t) = 34(1− t) + 1
4cos 2t− 1
8sin 2t− cos t
z (t) = cos t;
(l)
{x (t) = 1
4sh t+ 3
4te−t
y (t) = 34t sh t
.
(m) x (t) = tet;(n) x (t) = 1;(o) x (t) = sin t;(p) x (t) = et + 1.(a) xn = 3n − 2n−1 + (n− 1) 2n−1, ∀n ∈ N;(b) xn = 1√
5
(1+
√5
2
)n− 1√
5
(1−
√5
2
)n, ∀n ∈ N.














Transformata FourierTema 9
(1) Sa se verifice daca urmatoarele functii f : R → R sunt dinL1 (R) si, ın caz afirmativ, determinati-le transformatele Fourier:(a) f (t) = 1
1+t2;
(b) f (t) = tt2+1
;
(c) f (t) = 1(1+t2)2
;
(d) f (t) = t2
(1+t2)2;
(e) f (t) = e−|t|;
(f) f (t) = e−t2
2 .(2) Determinati transformatele Fourier ale urmatoarelor functii f :
R → R cu suport compact:
(a) f (t) =
{1, daca |x| ≤ 1,0, daca |x| > 1;
(b) f (t) =
{sin t, daca |x| ≤ π,0, daca |x| > π;
(c) f (t) =
{cos t, daca |x| ≤ π,0, daca |x| > π.
(3) Determinati transformatele Fourier Fcos si Fsin ale functiilorf : [0,∞) → R urmatoare:(a) f (t) = 1
1+t2;
(b) f (t) = 1(1+t2)2
;
(c) f (t) = e−|t|;
(d) f (t) = e−t2
2 .(4) Folosind teorema de inversare Fourier, reprezentati functiile f :
R → R urmatoare, ca integrale Fourier:(a) f (t) = 1
1+t2;
(b) f (t) = 1(1+t2)2
;
(c) f (t) = e−|t|;
(d) f (t) = e−t2
2 .
1